Изобретение относится к авиастроению, где измерение положения поперечного центра тяжести лопастей несущих и рулевых винтов вертолетов является важной составной частью балансировки лопастей, а поперечная центровка проверяется для обеспечения их флаттерной устойчивости.
За прототип принято устройство для измерения поперечной центровки лопастей несущих и рулевых винтов вертолетов, состоящее из рычага, одной стороной опирающегося призмой на неподвижную опору, второй стороной опирающегося призмой на весы, на рычаге устройства установлен один ложемент с базовым упором (Технические условия на поставку лопастей несущих винтов 286-2900-00ТУ, 90-2901-00ТУ, 22-2700-3000ТУ, 24-2700-00ТУ и лопастей рулевых винтов вертолетов 286-3921 00ТУ, 22-3920-000ТУ и 90-2924-00ТУ).
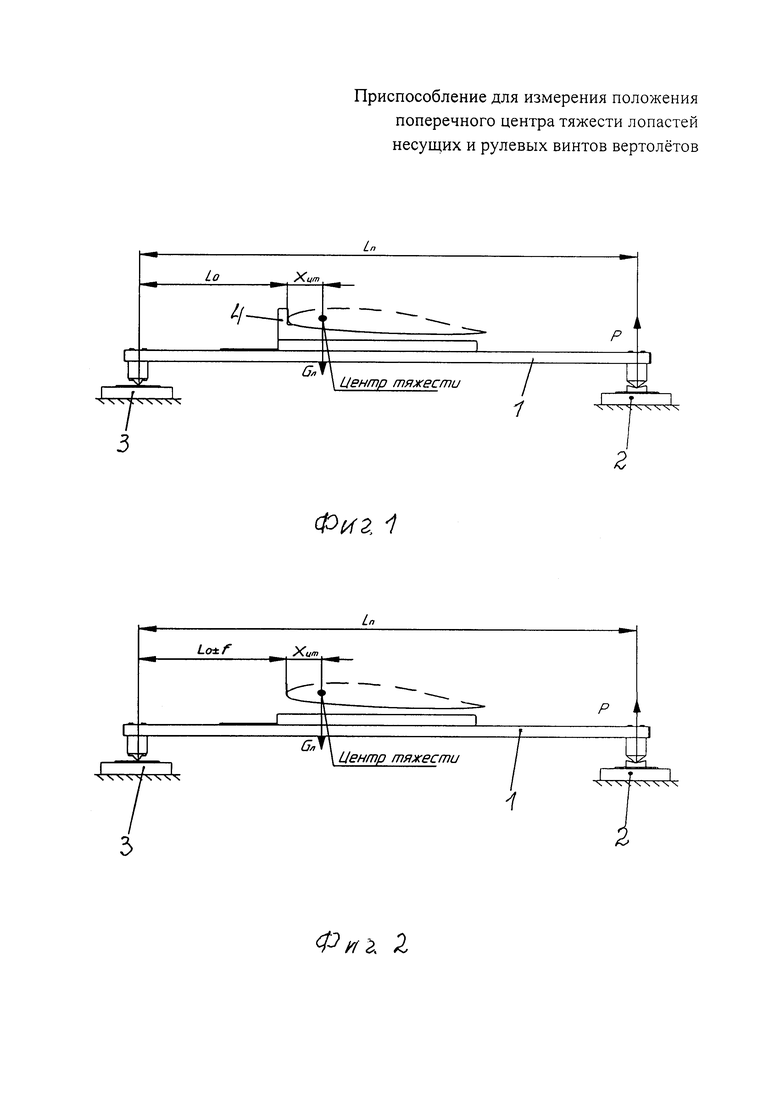
Измерение положения центра тяжести лопасти поперечно относительно крайней лобовой точки носика лопасти производится весовым методом по схеме, представленной на фигуре 1.
Формула для определения положения поперечного центра тяжести лопасти:
где  - расстояние на рычаге 1 между ребром призмы весов 2 и ребром призмы на неподвижной опоре 3 (аттестованный размер),
- расстояние на рычаге 1 между ребром призмы весов 2 и ребром призмы на неподвижной опоре 3 (аттестованный размер),
Gл - масса лопасти, в кг,
Р - показания весов, в кг,
 - расстояние от вертикальной плоскости, проходящей через ребро призмы на неподвижной опоре 3, до вертикальной базовой плоскости ложемента 4 приспособления для поперечной центровки (аттестованный размер).
- расстояние от вертикальной плоскости, проходящей через ребро призмы на неподвижной опоре 3, до вертикальной базовой плоскости ложемента 4 приспособления для поперечной центровки (аттестованный размер).
Важным фактором, влияющим на результат измерения положения поперечного центра тяжести лопасти, является изгиб, кривизна лопасти в плоскости вращения, на который влияют при изгибе комлевая и хвостовая части. Измерения кривизны лопасти в плоскости вращения производится с целью компенсации смещения центра тяжести лопасти поперечно относительно базового размера.
В конструкторской документации предусмотрены схемы и размеры положения базовых точек измерения, в которых измеряется кривизна лопасти на определенном расстоянии, чаще всего относительно наиболее удаленных базовых точек, чтобы измерения были более заметными. Далее кривизна учитывается частично, через коэффициент k, равный отношению учетного значения кривизны в формуле к измеренной на наиболее удаленных базовых точках лопасти. Изгиб ƒ измеряется в мм и учитывается как часть этой величины, то есть с коэффициентом k и знаком «-» ƒ, если лопасть выпуклая в сторону вращения или знаком «+» ƒ, если вогнутая.
Формула для определения положения поперечного центра тяжести лопасти с учетом кривизны лопастей в плоскости вращения примет вид:
Эта трудоемкая операция не обеспечивает необходимую точность измерения положения поперечного центра тяжести лопасти с учетом изгиба лопасти в плоскости вращения.
Задачей предлагаемого изобретения является повышение точности измерений и снижение трудоемкости.
Технический результат достигается за счет того, что в приспособлении для измерения положения поперечного центра тяжести лопастей несущих и рулевых винтов вертолетов, имеющем рычаг, одной стороной опирающийся призмой на неподвижную опору, второй стороной опирающийся призмой на весы, при этом на рычаге закреплены два ложемента с двумя базовыми упорами, разнесенными симметрично относительно центра тяжести лопасти на расчетный размер, на расстояние  что соответствует схеме, представленной на фигуре 2.
что соответствует схеме, представленной на фигуре 2.
Из схемы видно, что изменяя расстояние между двумя базовыми упорами  и производя измерения кривизны лопасти в плоскости вращения ƒ, необходимо принять расстояние
и производя измерения кривизны лопасти в плоскости вращения ƒ, необходимо принять расстояние  таким, чтобы привести коэффициент k=1,
таким, чтобы привести коэффициент k=1,
тогда формула (2), где  - расстояние между ребром призмы весов 2 и ребром призмы на неподвижной опоре 3 (аттестованный размер),
- расстояние между ребром призмы весов 2 и ребром призмы на неподвижной опоре 3 (аттестованный размер),
Gл - масса лопасти, в кг,
Р - показания весов, в кг,
 - расстояние от вертикальной плоскости, проходящей через ребро призмы неподвижной опоры до вертикальной базовой плоскости двух ложементов приспособления для определения положения поперечного центра тяжести лопасти, разнесенных на +
- расстояние от вертикальной плоскости, проходящей через ребро призмы неподвижной опоры до вертикальной базовой плоскости двух ложементов приспособления для определения положения поперечного центра тяжести лопасти, разнесенных на +  и -
и -  от центра тяжести лопасти (аттестованный размер),
от центра тяжести лопасти (аттестованный размер),
±ƒ - величина кривизны лопасти на базе  знаком «-» ƒ, если лопасть выпуклая в сторону вращения, или знаком «+» ƒ, если вогнутая.
знаком «-» ƒ, если лопасть выпуклая в сторону вращения, или знаком «+» ƒ, если вогнутая.
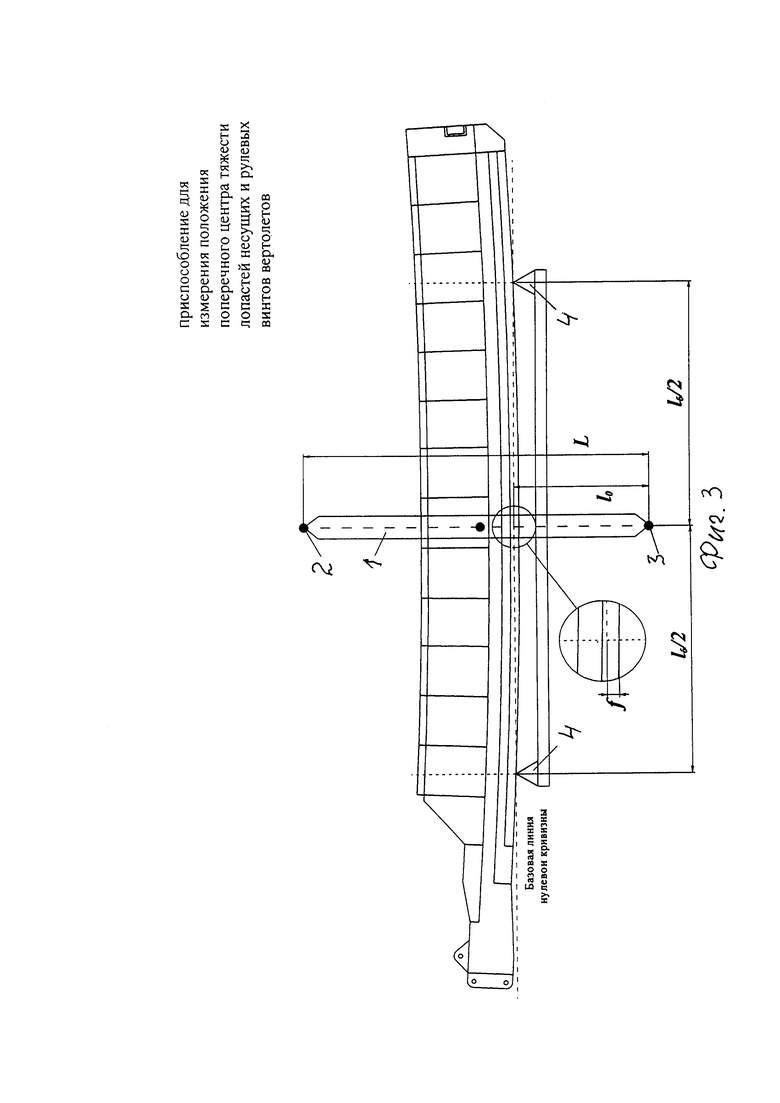
На фигуре 3 представлена схема приспособления для измерения положения поперечного центра тяжести лопастей несущих и рулевых винтов вертолетов, вид сверху, включающая рычаг 1, весы 2, неподвижную опору 3, ложементы 4 с двумя базовыми упорами. Легко устанавливаем лопасть на два ложемента 4 с базовыми упорами.
Рассмотрим пример для выпуклой лопасти:
Выпуклая в плоскости вращения лопасть смещена центром тяжести в сторону неподвижной опоры, между двумя базовыми упорами на величину кривизны ƒ на базе  в данном случае «-» выпуклой лопасти.
в данном случае «-» выпуклой лопасти.
В формуле (3) видно, что измеренная кривизна лопасти ƒ на базе  указана дважды, но с разными знаками, это объясняется тем, что лопасть при установке в приспособление для определения положения поперечного центра тяжести лопасти на два базовых упора смещена центром тяжести на величину измеренной кривизны ƒ, в сторону неподвижной опоры, при выпуклой лопасти или от неподвижной опоры при вогнутой лопасти в плоскости вращения. Весы указывают результат Р уже с учетом смещения центра тяжести лопасти, так как смещение происходит на рычаге приспособления с одной опорой на весах, а второй на неподвижной опоре. Формула для определения положения поперечного центра тяжести лопасти
указана дважды, но с разными знаками, это объясняется тем, что лопасть при установке в приспособление для определения положения поперечного центра тяжести лопасти на два базовых упора смещена центром тяжести на величину измеренной кривизны ƒ, в сторону неподвижной опоры, при выпуклой лопасти или от неподвижной опоры при вогнутой лопасти в плоскости вращения. Весы указывают результат Р уже с учетом смещения центра тяжести лопасти, так как смещение происходит на рычаге приспособления с одной опорой на весах, а второй на неподвижной опоре. Формула для определения положения поперечного центра тяжести лопасти  примет вид:
примет вид:
Проведенные опытные работы подтверждают выполнение формулы (4). Для указанных измерений применяют прецизионные весы с пределом измерений, определяемым массой лопасти и приспособления, должны иметь дискретность цифрового отсчета d=(1/20000-1/50000) наибольшего предела измерений, что вполне выполнимо, на весах второго класса точности по ГОСТ Р 53288-2008. Такое условие выбора весов позволяет при перемещении центра тяжести лопасти на 0,1 мм получить изменения показаний весов на (2-4)d - это объективный запас точности измерений.
Предлагаемое приспособление позволяет:
1. Автоматизировать процесс измерения и программно выполнять расчеты.
2. Получить высокую точность и превосходную повторяемость измерений положения поперечного центра тяжести лопасти.
3. Лопасть легко и стабильно устанавливать на два базовых упора двух ложементов, даже не опытными исполнителями.
4. Исключить человеческий фактор.
5. Сократить трудоемкость измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ ВИНТОВ ВЕРТОЛЕТОВ | 2005 |
|
RU2292021C1 |
| УСТРОЙСТВО ДЛЯ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ ВИНТОВ ВЕРТОЛЕТОВ | 2005 |
|
RU2311624C2 |
| Универсальное приспособление сравнения жесткости лопастей несущих или рулевых винтов вертолётов на изгиб в плоскости тяги | 2018 |
|
RU2704753C1 |
| Универсальное приспособление для определения жесткостных характеристик лопастей на изгиб в плоскости тяги | 2016 |
|
RU2659861C2 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ ВРАЩАЮЩЕГО МОМЕНТА, ПРЕДНАЗНАЧЕННОЕ ДЛЯ ВЕРТОЛЕТА | 1995 |
|
RU2138422C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ДЛИННОМЕРНОГО ИЗДЕЛИЯ, НАПРИМЕР ЛОПАСТИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 1994 |
|
RU2084839C1 |
| Стенд для определения массоцентровочных характеристик изделий больших масс | 2016 |
|
RU2655726C2 |
| КОНВЕРТОПЛАН С РЕАКТИВНЫМ ПРИВОДОМ РОТОРОВ, УПРАВЛЯЕМЫЙ РОТОРАМИ ПОСРЕДСТВОМ АВТОМАТОВ ПЕРЕКОСА ЧЕРЕЗ РЫЧАГИ УПРАВЛЕНИЯ, НЕ ТРЕБУЮЩИЙ ДОПОЛНИТЕЛЬНЫХ СРЕДСТВ УПРАВЛЕНИЯ | 2013 |
|
RU2570241C2 |
| ЛОПАСТЬ РУЛЕВОГО ВИНТА ВЕРТОЛЕТА И РУЛЕВОЙ ВИНТ ВЕРТОЛЕТА | 2009 |
|
RU2494012C2 |
| СПОСОБ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ ВОЗДУШНЫХ ВИНТОВ | 2007 |
|
RU2336508C1 |
Изобретение относится к области авиации, в частности к устройствам балансировки и определения центров тяжести конструкций. Приспособление для измерения положения поперечного центра тяжести лопастей несущих и рулевых винтов вертолетов содержит рычаг, одной стороной опирающийся призмой на неподвижную опору, второй стороной опирающийся призмой на весы. На рычаге закреплены два ложемента с двумя базовыми упорами, разнесенными симметрично относительно центра тяжести лопасти на расчетный размер. Обеспечивается повышение точности и снижение трудоемкости измерений. 3 ил.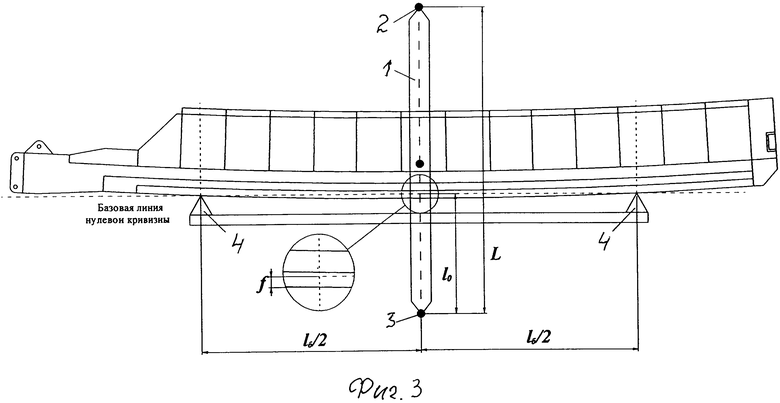
Приспособление для измерения положения поперечного центра тяжести лопастей несущих и рулевых винтов вертолетов, состоящее из рычага, одной стороной опирающегося призмой на неподвижную опору, второй стороной опирающегося призмой на весы, отличающееся тем, что на рычаге закреплены два ложемента с двумя базовыми упорами, разнесенными симметрично относительно центра тяжести лопасти на расчетный размер.
| УСТРОЙСТВО ДЛЯ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ ВИНТОВ ВЕРТОЛЕТОВ | 2005 |
|
RU2311624C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ДЛИННОМЕРНОГО ИЗДЕЛИЯ, НАПРИМЕР ЛОПАСТИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 1994 |
|
RU2084839C1 |
| US 4078422 A1, 14.03.1978 | |||
| US 5824897 A, 20.10.1998. | |||

