Изобретение относится к измерениям, в частности к коррекции статических моментов лопастей воздушных винтов, являющихся вращающейся несущей поверхностью, и может быть использовано для балансировки лопастей несущих и рулевых винтов вертолетов в процессе их изготовления.
Известен способ балансировки воздушных винтов, заключающийся в статической балансировке лопастей воздушного винта перед установкой их на вертолет, при котором определяют весовые параметры статических моментов лопастей воздушного винта и по их результатам моделируют расстановку лопастей на втулке воздушного винта из условия уравновешивания центробежных сил. (Патент RU №2180735 С1. Способ балансировки воздушных винтов вертолетов. - МПК7: G01М 1/12. - Бюл. №8, 20.03.2002). Недостатком известного способа является обеспечение сбалансированности комплекта лопастей для одного воздушного винта путем переустановки их местами между собой в последовательности, определенной моделированием расположения лопастей на втулке воздушного винта с помощью микропроцессора по результатам взвешивания и определения статического момента каждой лопасти. Однако выход из строя одной из лопастей комплекта требует замены на вертолете всех остальных лопастей воздушного винта.
Известен способ статической балансировки лопастей винтов вертолетов, заключающийся в определении фактических, сначала поперечных, затем и продольных весовых моментов комлевой и концевой частей лопасти и выполнении весовой коррекции путем взвешивания в четырех точках попарно на комлевой и концевой частях несущей поверхности лопасти и целенаправленного добавления или удаления веса в соответствующих местах поверхности лопасти для приведения фактических поперечных и продольных весовых моментов комлевой и концевой частей лопасти к заданным значениям этих весовых моментов по хордам и по размаху, с помощью микропроцессора, запрограммированного на обработку полученных весовых данных частей лопасти и вычисление величин коррекции поперечных и продольных весовых моментов комлевой и концевой частей лопасти. (Патент RU №2138790 С1. Устройство и способ для статической балансировки лопастей винтов вертолетов. - МПК6: G01М 1/12, В64С 27/00. - 1999.09.27). Недостатком известного технического решения является погрешность балансировки лопастей воздушного винта, возникающая с коррекцией весовых моментов лопасти посредством добавления или удаления балансировочной массы в отсеках балансировки лопасти.
Известен способ статической балансировки лопастей, являющихся вращающейся несущей поверхностью, заключающийся в приведении статического момента лопасти к предварительно заданным значениям статических моментов как в продольном, так и в направлении толщины лопасти, путем распределения по поверхности лопасти дополнительной балансировочной массы, имеющей высокую плотность (объемную массу), наносимой на поверхность лопасти в количестве, определенном после взвешивания лопасти в трех точках с одной опорой в комле и двумя опорами в конце лопасти, позволяющем наряду с коррекцией статических моментов осуществлять компенсацию отклонения от предварительно заданной массы лопасти, обеспечивающих вращение несущего винта без вибраций. После нанесения дополнительной балансировочной массы на поверхность лопасти производят дополнительное взвешивание лопасти с целью проверки соответствия фактических результатов взвешивания с заданными параметрами и в случае их расхождения повторно выполняют коррекцию, после совпадения значений параметров выполняют полимеризацию и затвердение покрытия. (Патент FR №2315691 А. Способ коррекции статического момента лопастей, являющихся вращающейся несущей поверхностью, и приспособление для реализации данного способа. - МПК: G01М 1/12. - 21.01.77). Данный способ принят за прототип.
Недостатком известного способа, принятого за прототип, является отделение во время эксплуатации нанесенного на поверхность лопасти балансировочной массы, вызывающее отклонение значений весовых моментов от заданных параметров и соответственно нарушение динамической балансировки лопастей на воздушных винтах.
Основной задачей, на решение которой направлено заявляемое изобретение, является повышение качества статической балансировки лопастей воздушных винтов.
Технический результат, достигаемый заявляемым изобретением, является повышение надежности работы воздушных винтов.
Указанный технический результат достигается тем, что в известном способе статической балансировки лопастей воздушного винта, являющихся вращающейся несущей поверхностью, заключающийся в приведении фактических значений статических моментов лопасти к предварительно заданным параметрам как по хорде, так и по размаху лопасти посредством взвешивания ее в трех точках на несущей поверхности, причем в двух точках на конце лопасти и одной на комле и целенаправленного добавления либо удаления веса, определяемого с помощью микропроцессора, запрограммированного на вычисление величин коррекции общей массы и координат центров тяжести лопасти в продольном и поперечном направлениях по фактическим весовым данным в точках взвешивания, согласно предложенному техническому решению
после целенаправленного добавления или удаления веса в отсеках балансировки лопасти приведенные значения статических моментов лопасти как по хорде, так и по размаху, окончательно приводят к предварительно заданным параметрам за счет обработки стыковочных отверстий на комле лопасти для монтажа ее на втулке воздушного винта, смещенными в продольном направлении относительно центра тяжести лопасти на величину коррекции радиуса статического момента лопасти по размаху, приведенного к предварительно заданному статическому моменту лопасти по размаху, и разворотом конца лопасти до совмещения центра тяжести лопасти с осью баланса в поперечном направлении, определенных микропроцессором по результатам обработки предварительно приведенных весовых данных в точках на конце и комле лопасти;
стыковочные отверстия в комле лопасти обрабатывают по кондуктору, установленному на столе, например, радиально-сверлильного станка, и смещенному относительно базовых поверхностей, например, по торцу комля и носку лопасти на величину коррекции, вычисленную микропроцессором по результатам обработки приведенных фактических весовых данных в трех точках на несущей поверхности лопасти;
стыковочные отверстия в комлевой части лопасти обрабатывают на станке с числовым программным управлением по программе, задаваемой микропроцессором по результатам обработки приведенных фактических весовых данных в трех точках на несущей поверхности лопасти.
На представленном чертеже показана схема коррекции статического момента лопастей, являющихся вращающейся несущей поверхностью.
Сущность заявленного способа статической балансировки лопастей воздушных винтов, являющихся вращающейся несущей поверхностью, заключается в приведении фактических значений статических моментов  и
и  лопасти 1 как по хорде, так и по размаху лопасти, к предварительно заданным параметрам
лопасти 1 как по хорде, так и по размаху лопасти, к предварительно заданным параметрам  и
и  заложенным в микропроцессор 2.
заложенным в микропроцессор 2.
Информация, заложенная в микропроцессор, представляет собой распределение веса лопасти 1 между тремя точками 3, 4 и 5 на несущей поверхности, которое соответствует фактическим весовым моментам лопасти  и
и  а также алгоритм расчета параметров весовой коррекции по хорде и по размаху в том случае, когда выявлено несоответствие фактического распределения весов G1, G2 и G3 в точках 3, 4 и 5 заданным [G1], [G2] и [G3] в микропроцессоре 2.
а также алгоритм расчета параметров весовой коррекции по хорде и по размаху в том случае, когда выявлено несоответствие фактического распределения весов G1, G2 и G3 в точках 3, 4 и 5 заданным [G1], [G2] и [G3] в микропроцессоре 2.
Посредством взвешивания лопасти 1 в точках 3 и 4 на конце и в точке 5 на комле лопасти 1 определяют фактическую массу лопасти Gл, которую сравнивают с предварительно заданной массой [Gл], заложенной в микропроцессор 2:
Gл=G1+G2+G3, кг
где G1, G2 и G3 - показания весов 6, 7 и 8 в точках 3, 4 и 5 на несущей поверхности лопасти соответственно;
δ - допуск на вес лопасти, кг.
По результату взвешивания лопасти 1 определяется балансировочная масса g для добавления или удаления веса:
g=[Gл]-Gл, кг,
где [Gл] - предварительно заданная в микропроцессоре 2 масса лопасти 1.
Балансировочная масса g распределяется в соответствующие отсеки балансировки лопасти до получения в точках 1, 2 и 3 предварительно заданных параметров:



где g1, g2 и g3 - разность весовых данных, распределенных в точках 3, 4 и 5,
g1+g2+g3=g,
[G1], [G2] и [G3] - предварительно заданные в микропроцессоре 2 значения весов в точках 3, 4 и 5 на несущей поверхности лопасти соответственно;
δ1, δ2 и δ3 - допуски на весовые параметры в точках 3, 4 и 5.
Приведенная масса лопасти  составит:
составит:

Фактический весовой момент массы  по размаху лопасти 1 составляет:
по размаху лопасти 1 составляет:

где L1 и L2 - приведенные расстояния до точек 3, 4 и 5 взвешивания лопасти, м.
После целенаправленного добавления или удаления веса g в отсеках балансировки лопасти 1 приведенные значения статических моментов лопасти  и
и  по размаху и по хорде лопасти 1 окончательно приводят к предварительно заданным параметрам
по размаху и по хорде лопасти 1 окончательно приводят к предварительно заданным параметрам  и
и  за счет обработки стыковочных отверстий 9 на комле лопасти 1 для монтажа ее на втулке воздушного винта на расстоянии а от оси 10 вращения воздушного винта, смещенными в продольном направлении по оси Х относительно центра тяжести 11 лопасти 1 на величину коррекции радиуса
за счет обработки стыковочных отверстий 9 на комле лопасти 1 для монтажа ее на втулке воздушного винта на расстоянии а от оси 10 вращения воздушного винта, смещенными в продольном направлении по оси Х относительно центра тяжести 11 лопасти 1 на величину коррекции радиуса  статического момента лопасти по размаху
статического момента лопасти по размаху  относительно оси 10 вращения воздушного винта, к предварительно заданному статическому моменту лопасти по размаху
относительно оси 10 вращения воздушного винта, к предварительно заданному статическому моменту лопасти по размаху 
Радиус  весового момента по размаху
весового момента по размаху  лопасти 1 относительно оси 10 вращения воздушного винта определяется по формуле:
лопасти 1 относительно оси 10 вращения воздушного винта определяется по формуле:

где Δr - допуск на радиус, м.
Величина коррекции Δх центров стыковочных отверстий 9 по координате X составляет:
Стыковочные отверстия 9 в комле лопасти 1 обрабатывают на расстоянии друг от друга, равном межцентровому расстоянию b между ответными стыковочными отверстиями 9 на втулке воздушного винта, симметрично оси 12 баланса лопасти 1 в поперечном направлении, с разворотом конца лопасти 1 на угол φ до совмещения центра тяжести 11 лопасти 1 с осью 12 баланса в поперечном направлении, определенных микропроцессором 2 по результатам обработки предварительно приведенных весовых данных

 и
и  в точках 3, 4 и 5 на конце и комле лопасти 1, полученных после выполнения целенаправленного добавления либо удаления веса g в отсеках балансировки лопасти 1.
в точках 3, 4 и 5 на конце и комле лопасти 1, полученных после выполнения целенаправленного добавления либо удаления веса g в отсеках балансировки лопасти 1.
Координата Yц.m. центра весового момента по хорде  относительно оси 12 баланса лопасти в поперечном направлении определяется по формуле:
относительно оси 12 баланса лопасти в поперечном направлении определяется по формуле:

Стыковочные отверстия 9 в комле лопасти 1 обрабатывают по кондуктору, установленному на столе, например, радиально-сверлильного станка и смещенному относительно базовых поверхностей, например, по торцу 13 комля и носку 14 лопасти 1 на величину коррекции Δх, вычисленную микропроцессором 2, или на станке с числовым программным управлением по программе, задаваемой микропроцессором 2 по результатам обработки приведенных фактических весовых данных 
 и
и  в трех точках 3, 4 и 5 на несущей поверхности лопасти 1.
в трех точках 3, 4 и 5 на несущей поверхности лопасти 1.
Пример осуществления предложенного способа статической балансировки лопастей воздушного винта на примере несущего винта вертолета.
Изготовленную лопасть 1 устанавливают на весы 6, 7 и 8 в точках 2, 3 и 4 на несущей поверхности лопасти 1 с базой на торец 13 комля и носок 14 лопасти 1 с отклонением от горизонтального положения ±1°. Посредством взвешивания лопасти 1 на весах 6, 7 и 8 в точках 2, 3 и 4 на несущей поверхности лопасти 1 определяют значения весов G1, G2 и G3 в точках 3, 4 и 5 фактического распределения веса Gл лопасти 1. По результату взвешивания лопасти 1 определяется балансировочная масса g для добавления или удаления веса лопасти 1, которая распределяется в соответствующие отсеки балансировки лопасти 1 до получения в точках 3, 4 и 5 значений 
 и
и  и
и  лопасти 1 в целом, близких к предварительно заданным параметрам [G1], [G2], [G3] и [Gл], соответствующим фактическим весовым моментам лопасти
лопасти 1 в целом, близких к предварительно заданным параметрам [G1], [G2], [G3] и [Gл], соответствующим фактическим весовым моментам лопасти  и
и  Когда выявлено несоответствие фактического распределения весов G1, G2 и G3 в точках 3, 4 и 5 заданным [G1], [G2], [G3] в микропроцессоре 2 с погрешностью 2 г, приведенные значения статических моментов лопасти
Когда выявлено несоответствие фактического распределения весов G1, G2 и G3 в точках 3, 4 и 5 заданным [G1], [G2], [G3] в микропроцессоре 2 с погрешностью 2 г, приведенные значения статических моментов лопасти  и
и  по размаху и по хорде лопасти 1 окончательно приводят к предварительно заданным параметрам
по размаху и по хорде лопасти 1 окончательно приводят к предварительно заданным параметрам  и
и  за счет обработки стыковочных отверстий 9 на комле лопасти 1, предназначенных для монтажа ее на втулке воздушного винта, на расстоянии а от оси 10 вращения воздушного винта с отклонением не более 1 мм, смещенными в продольном направлении по оси Х относительно центра тяжести 11 лопасти 1 на величину Δх коррекции радиуса
за счет обработки стыковочных отверстий 9 на комле лопасти 1, предназначенных для монтажа ее на втулке воздушного винта, на расстоянии а от оси 10 вращения воздушного винта с отклонением не более 1 мм, смещенными в продольном направлении по оси Х относительно центра тяжести 11 лопасти 1 на величину Δх коррекции радиуса  статического момента лопасти по размаху
статического момента лопасти по размаху  относительно оси 10 вращения воздушного винта, к предварительно заданному статическому моменту лопасти по размаху
относительно оси 10 вращения воздушного винта, к предварительно заданному статическому моменту лопасти по размаху  с разворотом конца лопасти 1 на угол φ до совмещения центра тяжести 11 лопасти 1 с осью 12 баланса в поперечном направлении с отклонением поперечной центровки не более 1 мм, определенных микропроцессором 2 по результатам обработки предварительно приведенных весовых данных
с разворотом конца лопасти 1 на угол φ до совмещения центра тяжести 11 лопасти 1 с осью 12 баланса в поперечном направлении с отклонением поперечной центровки не более 1 мм, определенных микропроцессором 2 по результатам обработки предварительно приведенных весовых данных 
 и
и  в точках 3, 4 и 5 на конце и комле лопасти 1, с помощью кондуктора, установленного на столе, например, радиально-сверлильного станка, и смещенного относительно торца 13 комля и носка 14 лопасти 1 на величину коррекции Δх, вычисленную микропроцессором 2, или на станке с числовым программным управлением по программе, задаваемой микропроцессором 2 по результатам обработки приведенных фактических весовых данных
в точках 3, 4 и 5 на конце и комле лопасти 1, с помощью кондуктора, установленного на столе, например, радиально-сверлильного станка, и смещенного относительно торца 13 комля и носка 14 лопасти 1 на величину коррекции Δх, вычисленную микропроцессором 2, или на станке с числовым программным управлением по программе, задаваемой микропроцессором 2 по результатам обработки приведенных фактических весовых данных 
 и
и  в трех точках 3, 4 и 5 на несущей поверхности лопасти 1.
в трех точках 3, 4 и 5 на несущей поверхности лопасти 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ ВИНТОВ ВЕРТОЛЕТОВ | 1995 |
|
RU2138790C1 |
| СПОСОБ СТАТИЧЕСКОЙ РЕГУЛИРОВКИ СОКОНУСНОСТИ ЛОПАСТЕЙ НЕСУЩЕГО ВИНТА ВЕРТОЛЁТА | 2023 |
|
RU2809683C1 |
| Лопасть воздушного винта многоконтурной конструкции | 2021 |
|
RU2767574C1 |
| СПОСОБ БАЛАНСИРОВКИ ВОЗДУШНЫХ ВИНТОВ ВЕРТОЛЕТОВ | 2001 |
|
RU2180735C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С КРЫЛОМ-СТАБИЛИЗАТОРОМ | 2020 |
|
RU2743306C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2611480C1 |
| ЛОПАСТЬ ВИНТА И АЭРОДИНАМИЧЕСКИЙ ПРОФИЛЬ ЛОПАСТИ (ВАРИАНТЫ) | 1996 |
|
RU2145293C1 |
| СПОСОБ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ РАБОЧЕГО КОЛЕСА ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ | 2011 |
|
RU2456566C1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2010 |
|
RU2441807C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ С ДВИЖИТЕЛЬНО-РУЛЕВОЙ СИСТЕМОЙ | 2016 |
|
RU2629478C2 |
Изобретение относится к измерениям, в частности к коррекции статических моментов лопастей воздушных винтов, являющихся вращающейся несущей поверхностью, и может быть использовано для балансировки лопастей несущих и рулевых винтов вертолетов в процессе их изготовления. Технический результат направлен на повышение качества статической балансировки лопастей воздушных винтов. Способ статической балансировки лопастей воздушного винта, являющихся вращающейся несущей поверхностью, заключается в приведении фактических значений статических моментов лопасти к предварительно заданным параметрам как по хорде, так и по размаху лопасти посредством взвешивания ее в трех точках на несущей поверхности. Причем в двух точках на конце лопасти и одной - на комле и целенаправленного добавления либо удаления веса в отсеках балансировки лопасти, определяемого с помощью микропроцессора, запрограммированного на вычисление величин коррекции общей массы и координат центров тяжести лопасти в продольном и поперечном направлениях по фактическим весовым данным в точках взвешивания. После изменения веса лопасти приведенные значения статических моментов лопасти окончательно приводят к предварительно заданным параметрам за счет обработки стыковочных отверстий на комле лопасти, предназначенных для монтажа ее на втулке воздушного винта, смещенных относительно центра тяжести лопасти на величину коррекции радиуса статического момента лопасти по размаху, приведенного к предварительно заданному статическому моменту лопасти по размаху, и разворотом конца лопасти до совмещения центра тяжести лопасти с осью баланса по хорде. 2 з.п. ф-лы, 1 ил.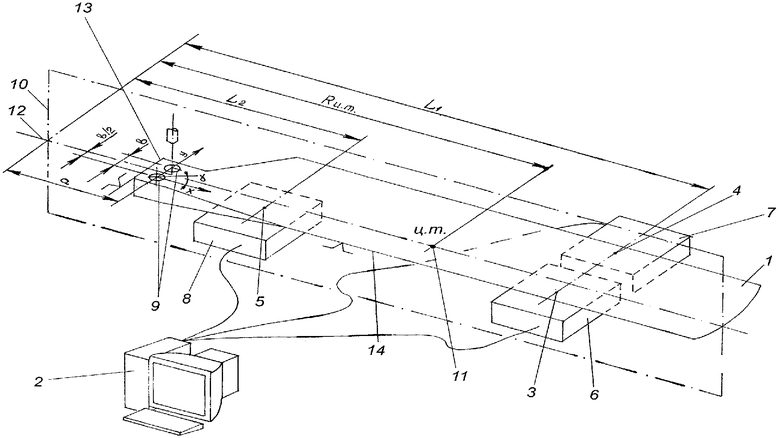
| СПОСОБ БАЛАНСИРОВКИ ВОЗДУШНЫХ ВИНТОВ ВЕРТОЛЕТОВ | 2001 |
|
RU2180735C1 |
| Способ сборки воздушных винтов с податливыми лопастями | 1984 |
|
SU1239535A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ ВИНТОВ ВЕРТОЛЕТОВ | 1995 |
|
RU2138790C1 |
| US 4078422 A, 14.03.1978. | |||

