ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к способу определения изменяющегося пространственного распределения частиц во множество моментов времени, следующих друг за другом с временными интервалами, который, для каждого из моментов времени, содержит этапы, перечисленные в ограничительной части пункта 1 формулы изобретения.
Определение распределения частиц в различные моменты времени может, в частности, служить для количественной регистрации потоков флюида, засеянного частицами. Так могут реконструироваться поля скоростей представляющих интерес потоков. Эта процедура обозначается как измерение скорости по трассерам частиц (PTV).
Частицами, для которых регистрируется изменяющееся пространственное распределение, могут быть, вместо физических частиц также другие физические объекты, отображаемые на основе их оптических признаков, такие как кромки, флуктуации плотности, максимумы распределений интенсивности света и т.д.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Способ определения условий потока в измерительном объеме, обтекаемом флюидом, заполненном оптически обнаруживаемыми частицами, который для каждого из множества моментов времени содержит этапы, перечисленные в ограничительной части независимого пункта 1 формулы изобретения, известен из DE 10 2009 009 551 B4. В соответствии с известным способом, в каждый момент времени получают множество двумерных реальных изображений трехмерного, реального распределения частиц посредством того же самого множества детекторов изображения, расположенных с пространственным смещением относительно друг друга. Для каждого детектора изображения определяется функция отображения, с помощью которой детектором изображения отображается реальное распределение. Для каждого момента времени, кроме того, задается оцененное пространственное распределение. На основании этого оцененного пространственного распределения итерационно определяется реальное пространственное распределение до желательной точности. При этом вычисляются двумерные виртуальные изображения оцененного распределения с использованием функций отображения. Различия между виртуальными изображениями и соответственно соотнесенными реальными изображениями определяются путем сравнения; и оцененное распределение изменяется в зависимости от определенных различий. Изменение оцененного распределения осуществляется, в частности, в отношении положения отдельных частиц. Каждое изменение оцененного распределения может подвергаться проверке достоверности в предположении, что никакая не-краевая частица не может исчезнуть из соответствующего измерительного объема.
Конкретное происхождение заданной величины для оцененного пространственного распределения не должно иметь значения в способе, известном из DE 10 2009 009 551 B4. Например, заданная величина для оцененного пространственного распределения частиц может быть теоретически вычисленным распределением числа оцениваемых частиц, причем численная оценка может следовать из плотности частицы, известной из эксперимента. Однако подобная заданная величина оказалась на практике неподходящей, чтобы, исходя из оцененного пространственного распределения, надежно достичь фактического пространственного распределения с желательной точностью. Поэтому при практическом применении известного из DE 10 2009 009 551 B4 способа применяются другие механизмы оценки, которые основаны на трехмерных реконструкциях пространственных распределений из двумерных реальных изображений, получаемых в соответствующий момент времени. В частности, в качестве заданной величины может применяться результат заранее выполненного определения пространственных положений отдельных частиц на основе их положений в реальных изображениях посредством триангуляции. Из-за этой выполняемой для каждого момента времени триангуляции возникают высокие вычислительные затраты в дополнение к шагам итерации, чтобы от оцененного пространственного распределения прийти к фактическому пространственному распределению. Кроме того, максимальная концентрация частиц ограничена границами применимости триангуляции.
ЗАДАЧА ИЗОБРЕТЕНИЯ
В основе изобретения лежит задача создать способ определения изменяющегося пространственного распределения частиц во множество моментов времени, следующих друг за другом с временными интервалами, который для каждого момента времени содержит этапы, перечисленные в ограничительной части пункта 1 формулы изобретения, который при особенно низких вычислительных затратах обеспечивает возможность точного определения фактического пространственного распределения частиц с соответственно желательной точностью.
РЕШЕНИЕ
Указанная задача изобретения решается способом с признаками независимого пункта 1 формулы изобретения. Зависимые пункты формулы изобретения относятся к предпочтительным вариантам осуществления этого способа.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Соответствующий изобретению способ определения изменяющегося пространственного распределения частиц во множество моментов времени, следующих друг за другом с временными интервалами, содержит для каждого из моментов времени следующие этапы: (i) получение реальных двумерных изображений частиц с различными эффективными функциями отображения в соответствующий момент времени; (ii) задание оцененного пространственного распределения частиц; (iii) вычисление виртуальных двумерных изображений оцененного пространственного распределения с различными функциями отображения; (iv) регистрация различий между виртуальными двумерными изображениями и реальными двумерными изображениями с теми же самыми функциями отображения и (v) изменение оцененного пространственного распределения частиц для уменьшения различий, чтобы получить пространственное распределение, приближенное к фактическому пространственному распределению частиц в момент времени. При этом оцененное пространственное распределение частиц задается для по меньшей мере одного момента времени, посредством того, что положения отдельных частиц в полученном для другого момента времени приближенном пространственном распределении сдвигаются в зависимости от того, как их положения сдвигались между приближенными пространственными распределениями для по меньшей мере двух других моментов времени.
Для данной комбинации признаков соответствующего изобретению способа по изобретению показаны следующие указания. То, что в соответствующем изобретению способе этапы (i) - (v) выполняются для каждого из множества моментов времени, следующих друг за другом с временными интервалами, не исключает, что в другие, в частности, более ранние моменты времени, для которых еще не было доступно никаких приближенных пространственных распределений, оцененное пространственное распределение частиц также задается другими способами, например, на основе оценки реальных изображений с помощью триангуляции.
Различные эффективные функции отображения, с помощью которых получают реальные двумерные изображения частиц в каждый момент времени, остаются для данных моментов времени одинаковыми, или изменения, происходящие в функциях отображения, должны быть скомпенсированы. Различные функции отображения включают в себя, в частности, различные направления отображения. По меньшей мере применяются две различные функции отображения с различными направлениями отображения. Однако количество камер, используемых для съемки изображений частиц, также может быть значительно больше двух.
Регистрация различий между виртуальными и реальными двумерными изображениями с теми же самыми функциями отображений, а также изменение оцененного пространственного распределения частиц для уменьшения различий может, в частности, относиться к положению частиц в двумерных изображениях и пространственным положениям частиц в пространственном распределении. В принципе, однако, могут также учитываться другие параметры, как они описаны в DE 10 2009 009 551 B4.
Этапы (iii) - (v) в соответствующем изобретению способе могут также итерационно повторяться двукратно или многократно, чтобы постепенно адаптировать приближенное пространственное распределение к фактическому пространственному распределению, пока, например, максимальная ошибка по отношению к положению отдельных частиц больше не будет превышаться. Также в этом отношении касательно каких-либо деталей можно сослаться на DE 10 2009 009 551 B4.
Приближенные пространственные распределения для одного и по меньшей мере двух других моментов времени могут представлять собой приближенные пространственные распределения для более ранних или более поздних моментов времени. Это также верно, если в некоторых следующих утверждениях речь идет только о более ранних моментах времени. Эти утверждения следует понимать так, что они также соответственно верны для более поздних моментов времени, следующих за по меньшей мере одним моментом времени. Часто приближенные пространственные распределения для одного и по меньшей мере двух других моментов времени, которые учитываются при задании оцененного пространственного распределения для по меньшей мере одного момента времени, будут аппроксимироваться в общем для более ранних или более поздних моментов времени.
В соответствующем изобретению способе для задания оцененного пространственного распределения частиц, с одной стороны, обращаются к положениям отдельных частиц в полученном для более раннего момента времени приближенном пространственном распределении и, с другой стороны, к смещениям положений отдельных частиц между приближенными пространственными распределениями для по меньшей мере двух более ранних моментов времени. Тем самым, задание оцененного пространственного распределения частиц основано на предположении, что частицы по меньшей мере по существу продолжают свои прежние траектории. Если они даже точно продолжают свои прежние траектории, и эти траектории были полностью зарегистрированы с пространственными распределениями, определенными в более ранние моменты времени, не возникает никаких различий между вычисленными виртуальными двумерными изображениями для заданного оцененного пространственного распределения и полученными для соответствующего момента времени реальными двумерными изображениями. Другими словами, различия существуют только тогда, когда траектории частиц продолжаются не точно так, как прежде, и каждое необходимое изменение оцененного пространственного распределения частиц для устранения различий между виртуальными и реальными двумерными изображениями должно отображать только это изменение траекторий. Соответственно в соответствующем изобретению способе оцененное пространственное распределение, как правило, очень близко к фактическому пространственному распределению, и требуется лишь несколько шагов итерации, чтобы скомпенсировать существующие различия. Таким образом, соответствующий изобретению способ требует невысоких вычислительных затрат и соответственно является весьма быстродействующим.
При этом также следует учитывать, что в соответствующем изобретению способе, как правило, речь идет о таком PTV, при котором в любом случае регистрируются смещения положений частиц между пространственными распределениями, определенными в отдельные моменты времени, так как они являются интересующей информацией в PTV. Тем самым имеются в распоряжении уже вся информация, необходимая для задания оцененного пространственного распределения частиц для следующего момента времени. В частности, трехмерные реконструкции пространственного распределения из двумерных реальных изображений требуются только на начальном периоде соответствующего изобретению способа, пока не будет задано первое оцененное пространственное распределение на основе ранее определенных пространственных распределений.
ДОПОЛНИТЕЛЬНЫЙ УРОВЕНЬ ТЕХНИКИ
Из J. Willneff (2003): A Spatio-Temporal Matching Algorithm for 3D Particle Tracking Velocimetry, Zürich, Diss. ETH № 15276, известно, что для отыскания тех же самых частиц, которые уже регистрировались в более ранний момент времени, на изображениях, полученных в более поздний момент времени, положения частиц в более поздний момент времени экстраполируются, исходя из их более ранних положений, и на этой основе с учетом функций отображения вычисляются их ожидаемые положения в реальных изображениях. Для определения пространственных распределений самих частиц не применяют экстраполированные положения, а обращаются к обычным трехмерным реконструкциям положений частиц из двумерных реальных изображений.
ДАЛЬНЕЙШЕЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Соответствующий изобретению способ является первым способом PTV, в котором пространственное распределение частиц в по меньшей мере один момент времени определяется на основе определенных для более ранних моментов времени пространственных распределений частиц таким образом, что больше даже не требуется выполнять грубого определения пространственных положений частиц в по меньшей мере один момент времени посредством триангуляции или другой трехмерной реконструкции пространственного распределения из полученных в по меньшей мере один момент времени реальных изображений. Это является основой того, что пространственное распределение частиц определяется в по меньшей мере один момент времени с высокой скоростью. Тем не менее, в настоящем изобретении, также достигается высокая точность при определении пространственных положений отдельных частиц.
В соответствующем изобретению способе приближенное пространственное распределение, полученное для более раннего момента времени, из которого исходят для задания оцененного пространственного распределения частиц, может быть пространственным распределением, которое было получено для последнего более раннего момента времени, лежащего перед по меньшей мере одним моментом времени. Это пространственное распределение, как правило, является тем, которое ближе всего из всех прежних пространственных распределений подходит к пространственному распределению в следующий момент времени. Следовательно, оно может также использоваться при определенных обстоятельствах даже как оцененное пространственное распределение для следующего момента времени, если в распоряжении имеется, например, только оно, и не доступны никакие другие пространственные распределения, из которых могут определяться смещения положений отдельных частиц.
В отношении этих смещений положений частиц между приближенными пространственными распределениями для по меньшей мере двух более ранних моментов времени, предпочтительно, если они включают по меньшей мере распределения, которые были получены для последнего и предпоследнего более раннего момента времени, лежащего перед по меньшей мере одним моментом времени. Из этих обоих пространственных распределений может выводиться актуальная информация о скоростях частиц в интервале времени между последним и предпоследним моментом времени перед по меньшей мере одним моментом времени. Эти скорости между последним и по меньшей мере одним моментом времени могут изменяться лишь ограничено, и являются, таким образом, наряду с последним пространственным распределением частиц, важнейшей информацией для задания оцененного пространственного распределения частиц для по меньшей мере одного момента времени, для которого выполняется соответствующий изобретению способ, и который упоминается здесь для простоты как "текущий" момент времени.
Прежние траектории частиц могут в соответствующем изобретению способе также определяться более точно, т.е. с учетом большего количества приближенных пространственных распределений, чем в последний и предпоследний момент времени перед текущим моментом времени. Таким образом, оцененное пространственное распределение частиц может задаваться для по меньшей мере одного момента времени, при этом из приближенных пространственных распределений для по меньшей мере трех более ранних моментов времени определяются траектории отдельных частиц и экстраполируются до текущего момента времени.
Поскольку частицы продолжают свои прежние траектории непрерывно, если они следуют потокам во флюиде, частицы с прерывистыми траекториями могут быть идентифицированы и исключены из приближенных пространственных распределений.
Кроме того, для траекторий частиц может быть поставлено требование, что они отклоняются от решений Навье-Стокса для потока флюида, заполненного частицами, не более чем на заранее определенную величину. Таким образом, может производиться регуляризация траекторий Навье-Стокса.
Когда частица, траектория которой отслеживалась по нескольким более ранним моментам времени, отсутствует в реальных изображениях, полученных в некоторый момент времени, но вновь появляется в реальных изображениях, полученных в более поздние моменты времени, на устойчивом продолжении той же траектории, ее положение в пространственном распределении, определенном для некоторого момента времени, может дополняться на продолженной траектории.
В принципе, при регистрации различий между виртуальными двумерными изображениями и реальными двумерными изображениями с теми же функциями отображения, частицы, отсутствующие в реальных изображениях, могут быть исключены из приближенного пространственного распределения. Когда, например, в случае частиц, отсутствующих в реальных изображениях, речь идет о краевых частицах в оцененном пространственном распределении, может допускаться, что они покинули измерительный объем.
С другой стороны, при регистрации различий между виртуальными двумерными изображениями и реальными двумерными изображениями с теми же функциями отображения, зарегистрированные дополнительные частицы в реальных изображениях могут включаться в приближенное пространственное распределение, особенно если дополнительные частицы находятся на краю измерительного объема. В этом случае может допускаться, что эти частицы вновь попадают в измерительный объем. Пространственные положения этих новых частиц могут быть определены путем трехмерной реконструкции из реальных двумерных изображений, причем требуемые для этого затраты, ввиду небольшого количества новых частиц, удерживаются в допустимых пределах.
В специальной форме выполнения соответствующего изобретению способа пространственные распределения частиц для моментов времени между первым моментом времени и гораздо более поздним вторым моментом времени определяются один раз, исходя из первого момента времени, для последующих моментов времени и один раз, исходя из второго момента времени, для предыдущих моментов времени. В идеальном случае при этом получаются, соответственно, два идентичных распределения частиц для каждого из моментов времени. Например, при высокой плотности частиц такой подход позволяет иногда разрешать частицы при проходе в одном временном направлении, которые при проходе в другом временном направлении не разрешаются. Тогда если частицы, которые содержатся только в одном из обоих пространственных распределений, определенных для одного из обоих моментов времени между первым моментом времени и вторым моментом времени, дополняются для соответствующего другого пространственного распределения для этого момента времени, то другое распределение будет содержать все положения всех разрешенных частиц.
Если в соответствующем изобретению способе частицы исчезают из определенного пространственного распределения, а затем новые частицы появляются в пространственном распределении, то фактически речь может идти о тех же самых частицах, траектории которых лишь временно не могли отслеживаться. Это особенно верно, если частицы исчезают и затем снова появляются не на краю наблюдаемого объема, а, например, в пространственной области, в которой линии визирования частиц в нескольких изображениях с разными функциями отображения лежат близко друг к другу, так что частицы на изображениях полностью или частично перекрываются друг с другом. Чтобы проверить, идет ли речь действительно о тех же самых частицах, предполагаемые траектории исчезающих частиц могут экстраполироваться, например, путем аппроксимации с помощью сплайн-функций, за пределы момента времени их исчезновения. Тогда можно проверить, лежит ли вновь появившаяся в распределении частица на или вблизи одной из этих экстраполированных траекторий, или ее траектория проходит параллельно или по меньшей мере примерно параллельно экстраполированной траектории. Этот способ также может быть выполнен в обратном временном направлении для каждой вновь появившейся частицы в прошлое. Если экстраполированные и реальные траектории отличаются друг от друга менее чем на заранее заданные предельные значения, то можно сделать вывод о том, что вновь появившаяся частица фактически является ранее исчезнувшей из распределения частицей. С помощью экстраполированных траекторий траектория такой частицы может тогда быть дополнена для моментов времени, в которые она не содержалась в распределении.
В соответствующем изобретению способе изменение оцененного пространственного распределения частиц для уменьшения различий между реальными и виртуальными двумерными изображениями может включать в себя координированное изменение пространственных положений, в частности, тех частиц, которые в оцененном пространственном распределении являются близко расположенными. В оцененном пространственном распределении близко расположенные частицы также находятся близко друг к другу в реальных и виртуальных двумерных изображениях. Поэтому при некоординированных изменениях пространственных положений этих частиц в оцененном пространственном распределении, чтобы сократить различия между реальными и виртуальными изображениями, существует риск того, что пространственное положение частицы изменяется таким образом, что оно согласуется с реальными изображениями фактически другой частицы. Тем самым также другая частица больше не будет соотнесена корректным образом. Любая такая перестановка означает ошибку в регистрации фактических траекторий частиц. При координированном изменении пространственных положений всех расположенных в плотной области частиц может легче распознаваться наиболее вероятное изменение пространственного положения для всех частиц. При этом могут устанавливаться различные краевые условия, такие как минимальное среднее ускорение частиц, минимальное среднеквадратичное отклонение решения уравнения Навье-Стокса для области и т.п.
В принципе, изменение оцененного пространственного распределения частиц для уменьшения различия между реальными и виртуальными двумерными изображениями может включать в себя координированное изменение пространственных положений всех частиц, которые содержатся в оцененном пространственном распределении. Однако из-за этого необходимые для соответствующего изобретению способа затраты становятся довольно большими. Поэтому целесообразно проводить координированное изменение оцененного пространственного распределения частиц только для тех частиц, отображения которых, ввиду совпадающих или очень близко друг к другу лежащих линий визирования, в одном, нескольких, почти всех или фактически всех из двумерных изображений частиц полностью или по меньшей мере частично перекрываются. Опасность существенного перекрытия изображений частиц в изображениях с разными функциями отображения существует, в частности, при применении лишь небольшого количества камер для получения реальных изображений частиц.
Предпочтительные усовершенствованные варианты изобретения вытекают из пунктов формулы изобретения, описания и чертежей. Упомянутые в описании преимущества признаков и комбинаций нескольких признаков приведены только для примера и могут проявляться альтернативно или кумулятивно, не требуя, чтобы преимущества обязательно достигались в соответствующих изобретению вариантах осуществления. Без того, что, как следствие, предмет приложенной формулы изобретения будет изменен, в отношении содержания раскрытия первоначальных материалов заявки и патента справедливо следующее: дополнительные признаки могут следовать из чертежей. Комбинация признаков различных вариантов осуществления изобретения или признаков различных пунктов формулы изобретения также возможна с отклонением от выбранных ссылок на другие пункты формулы изобретения и обусловлена настоящим. Это также относится к таким признакам, которые представлены на отдельных чертежах или упомянуты при их описании. Эти признаки также могут быть объединены с признаками различных пунктов формулы изобретения. Также приведенные в пунктах формулы изобретения признаки могут отсутствовать в других вариантах осуществления изобретения.
Признаки, названные в пунктах формулы изобретения и описании, касательно их количества, следует понимать так, что имеется именно это количество или большее количество, чем указанное количество, не требуя явного использования выражения "по меньшей мере". Таким образом, если, например, речь идет об элементе, следует понимать, что присутствует точно один элемент, два элемента или больше элементов. Эти признаки могут быть дополнены другими признаками или быть единственными признаками, которые составляют соответствующий продукт.
Ссылочные позиции, содержащиеся в формуле изобретения, не представляют никакого ограничения объема предмета, защищаемого пунктами формулы изобретения. Они служат только цели пояснения пунктов формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение более подробно поясняется и описывается на основе примеров осуществления со ссылкой на прилагаемые чертежи.
Фиг. 1 иллюстрирует соответствующий изобретению способ на основе первого примера осуществления.
Фиг. 2 иллюстрирует соответствующий изобретению способ на основе второго примера осуществления.
Фиг. 3 иллюстрирует прерывистую траекторию частицы, которая в соответствующем изобретению способе приводит к исключению частицы.
Фиг. 4 является блок-схемой для выполнения примера осуществления соответствующего изобретению способа; и
Фиг. 5 является блок-схемой для выполнения другого примера осуществления соответствующего изобретению способа.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
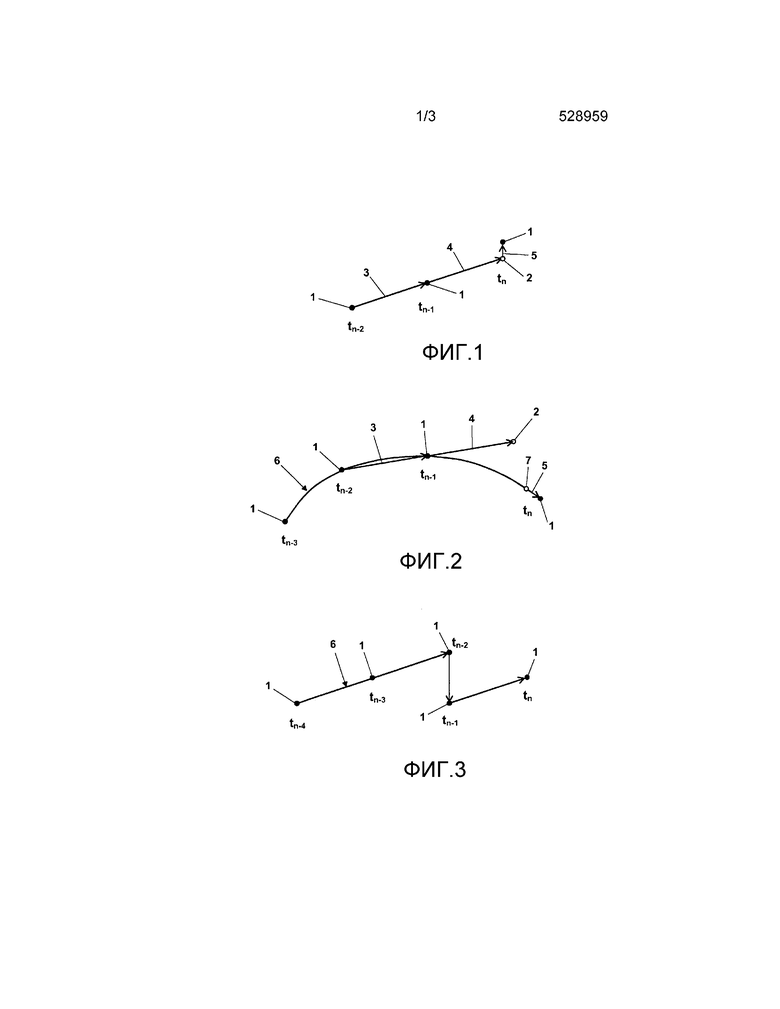
Фиг. 1 показывает с помощью черной точки частицу 1 в три момента времени tn-2, tn-1 и tn. Показаны положения частицы 1 в реальных изображениях, полученных с той же самой функцией отображения в моменты времени tn-2, tn-1 и tn. Из нескольких изображений, полученных в соответствующий момент времени tn-2, tn-1 или tn с различными функциями отображения, можно определить положение частицы 1 в пространстве, а в случае множества частиц - их пространственное распределение. В соответствующем изобретению способе это определение производится на основании подхода, в принципе, известного из DE 10 2009 009 551 B4, при котором, исходя из оцененного пространственного распределения, вычисляются виртуальные изображения, которые соответствуют функциям отображения, с которыми получают реальные изображения частиц. Затем виртуальные изображения сравниваются с реальными изображениями с теми же функциями отображения для определения различий в положениях частиц. Затем оцененное пространственное распределение изменяется таким образом, что эти различия уменьшаются. Эти этапы могут осуществляться итеративно до тех пор, пока различия, установленные на следующем шаге итерации, более не превысят заданного верхнего предела. В соответствующем изобретению способе оцененное распределение частиц задается на основе пространственных распределений частиц, определенных для более ранних моментов времени. Это осуществляется в отношении частицы 1, показанной на фиг. 1, следующим образом. Для момента времени tn задается оцененное положение 2 частицы 1 на основе ее последнего положения в момент времени tn-1 и ее смещения 3 между предпоследним моментом времени tn-2 и последним моментом времени tn-1. При одинаковых временных интервалах между моментами времени tn-2 и tn-1, с одной стороны, а также tn-1 и tn, с другой стороны, таким образом, исходят из того, что смещение 4 положения частицы 1 между моментами времени tn-1 и tn равно смещению 3 между моментами времени tn-2 и tn-1. Фактическое положение частицы 1 в момент времени tn может отклоняться от этого оцененного положения 2. Однако проявляющееся различие 5 может быть лишь малым. Соответственно, аппроксимация соответственного оцененного пространственного распределения множества частиц 1 к фактическому распределению частиц 1 будет успешной за несколько шагов итерации.
Фиг. 2 показывает траекторию 6 частицы 1 в интервале времени от tn-3 до tn, причем частица 1 воспроизводится в моменты времени tn-3, tn-2, tn-1 и tn. При этом фиг. 2 снова является двумерным изображением частицы 1 с фиксированной функцией отображения. Траектория 6 искривляется. Кроме того, скорость частицы 1 вдоль траектории 6 изменяется, то есть пути, проходимые частицей 1 между моментами времени tn-3, tn-2, tn-1 и tn, расположенными с равными временными интервалами, имеют различную длину. Поэтому для определения оцененного положения 7 частицы 1 в момент времени tn целесообразно учитывать такое количество более ранних моментов времени и имеющихся в эти моменты времени распределений частиц, что, основываясь на них, траектория 6 может регистрироваться с максимально возможным количеством ее свойств и экстраполироваться до момента времени tn. Это приводит к определению оцененной позиции 7 лишь с малым различием 5 относительно реального положения частицы 1 в момент времени tn. Экстраполяция положения частицы 1 в момент времени tn только на основе ее положения в момент времени tn-1 и ее смещения 3 между моментами времени tn-3 и tn-1, то есть предположение смещения 4 с тем же направлением и длиной, что и для смещения 3, аналогично фиг. 1, привело бы к оцененному положению 2 для момента времени tn, которое лежит далеко от фактического положения в момент времени tn, так что согласование оцененного положения 7 с фактическим положением частицы 1 было бы намного более затратным.
Фиг. 3 показывает траекторию 6, которая могла бы быть получена из определения положений частицы 1 в пять моментов времени от tn-4 до tn. Эта траектория имеет между моментами времени tn-2 и tn-1 прерывность, которая соответствует боковому скачку частицы относительно ее прежнего и будущего направления движения. Такую траекторию не может проходить реальная частица ввиду ее инерции и инерции совместно переносимого флюида. Поэтому такая частица 1 исключается в соответствующем изобретению способе.
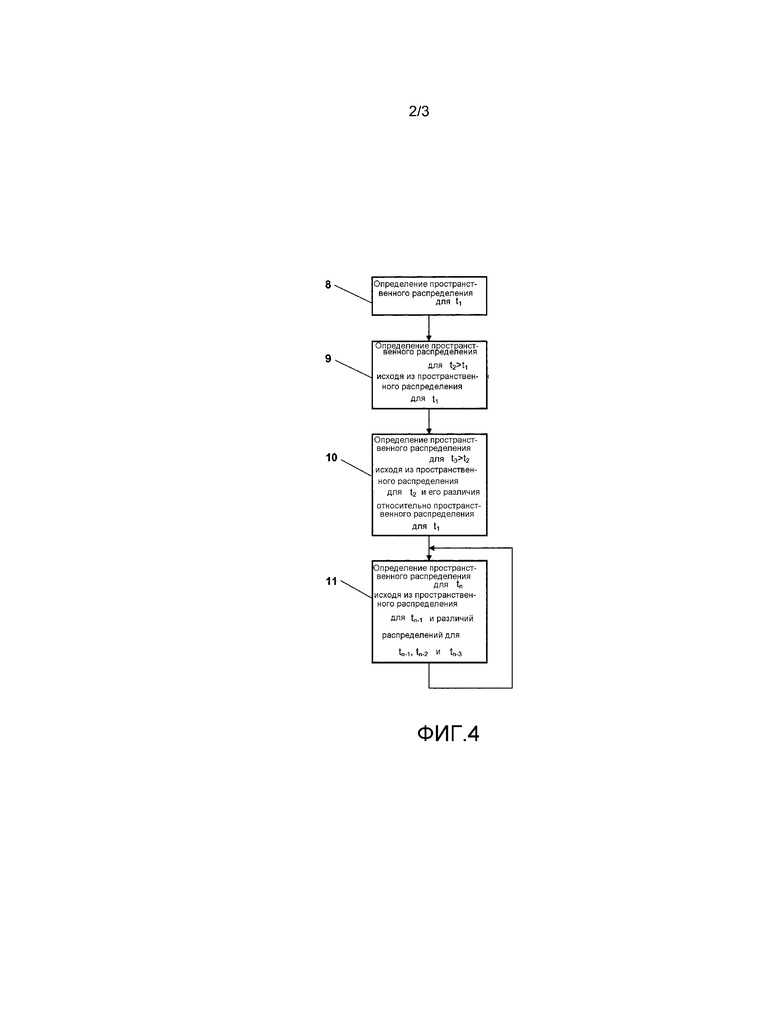
Представленный посредством блок-схемы на фиг. 4 соответствующий изобретению способ начинается с определения пространственного распределения частиц для момента времени t1 каким-либо, в принципе, известным способом. За этим этапом 8 следует этап 9, на котором пространственное распределение частиц для момента времени t2 после t1 определяется таким же образом. Для очень малого временного интервала между t1 и t2 и, соответственно, лишь малого возможного изменения положений отдельных частиц пространственное распределение частиц для момента времени t2 может также определяться посредством итерационной адаптации пространственного распределения, определенного для момента времени t1 в качестве оцененного пространственного распределения, к реальным изображениям распределения. При этом принцип при итерационной адаптации может соответствовать той, которая уже известна из DE 10 2009 009 551 В4.
Для следующего момента времени t3 на этапе 10 определяется пространственное распределение частиц, также исходя из оцененного пространственного распределения, как, в принципе, известно из DE 10 2009 009 551 B4. Однако в качестве оцененного пространственного распределения применяется не только последнее пространственное распределение в момент времени t2, но оно учитывает, наряду с распределением в момент времени t2, также смещение положений отдельных частиц между пространственными распределениями в моменты времени t1 и t2, при этом предполагаются одинаковые смещения также между t2 и t3. Тем самым, этот этап 10 соответствует процедуре, которая была проиллюстрирована на фиг. 1 для отдельной частицы. На следующем этапе 11 затем для более позднего момента времени tn определяется пространственное распределение, исходя из пространственного распределения для момента времени tn-1 и с учетом различий пространственного распределения для моментов времени tn-1, tn-2 и tn-3 и, возможно, еще других более ранних моментов времени. Метод, которым вычисляется оцененное пространственное распределение с учетом этих более ранних пространственных распределений для момента времени tn, соответствует принципу, проиллюстрированному на фиг. 2 для частицы 1. Затем этап 11 повторяется для всех других моментов времени, в которые получаются реальные изображения пространственного распределения частиц.
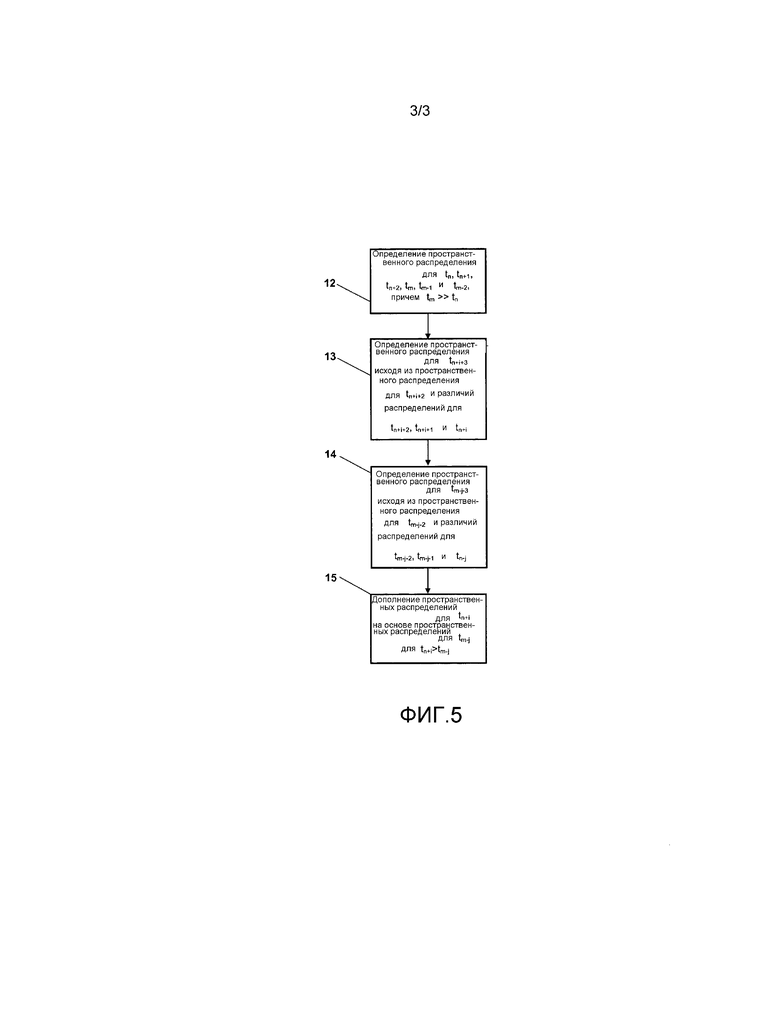
Представленный посредством блок-схемы на фиг. 5 соответствующий изобретению способ начинается на этапе 12 с определения пространственного распределения частиц для трех следующих друг за другом моментов времени tn, tn+1, tn+2 и tm, tm-1, tm-2, которые лежат один раз после первого момента времени tn и один раз перед намного более поздним моментом времени tm. Затем на последующих этапах 13 и 14 для моментов времени tn+i+3 и, соответственно, tm-j-3, остающихся между моментами времени tn и tm, определяются пространственные распределения, исходя из пространственных распределений для более ранних моментов времени tn+i+2, tn+i+1 и tn+i или более поздних моментов времени tm-j-2 и tm-j-1 и tm-j. При этом для каждого из этих моментов времени пространственное распределение определяется один раз при продвижении по течению времени и один раз при продвижении против течения времени. Если затем частицы в пространственных распределениях, которые регистрируются при продвижении в одном направлении, добавляются в распределения, которые были аппроксимированы при продвижении в другом направлении для одинаковых промежутков времени, то получаются пополненные пространственные распределения для этих моментов времени. Кроме того, траектории частиц, которые резко выделяются при проходе в одном временном направлении, проверяются на основе траекторий, определенных при проходе в другом временном направлении, на тот предмет, идет ли речь фактически о сплошных траекториях тех же самых частиц, или, например, о плоско пересекающихся траекториях различных частиц.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
1 частица
2 положение
3 смещение
4 смещение
5 различие
6 траектория
7 положение
8 этап
9 этап
10 этап
11этап
12 этап
13 этап
14 этап
15 этап
tn момент времени
tm момент времени
tn+i момент времени
tm-j момент времени
tn-4 момент времени
tn-3 момент времени
tn-2 момент времени
tn-1 момент времени
Изобретение относится к способу определения пространственного распределения частиц. Способ определения содержит следующие этапы: получение реальных двумерных изображений частиц с различными эффективными функциями отображения в соответствующий момент времени; задание оцененного пространственного распределения частиц; вычисление виртуальных двумерных изображений оцененного пространственного распределения с различными функциями отображения; регистрацию различий между виртуальными двумерными изображениями и реальными двумерными изображениями; и изменение оцененного пространственного распределения частиц с целью получить пространственное распределение, приближенное к фактическому пространственному распределению частиц в момент времени. Причем оцененное пространственное распределение задают для одного момента времени посредством того, что положения отдельных частиц в полученном для другого момента времени приближенном пространственном распределении сдвигают в зависимости от того, как их положения сдвигались между приближенными пространственными распределениями для по меньшей мере двух других моментов времени. Технический результат заключается в повышении точности определения фактического пространственного распределения частиц. 12 з.п. ф-лы, 5 ил. 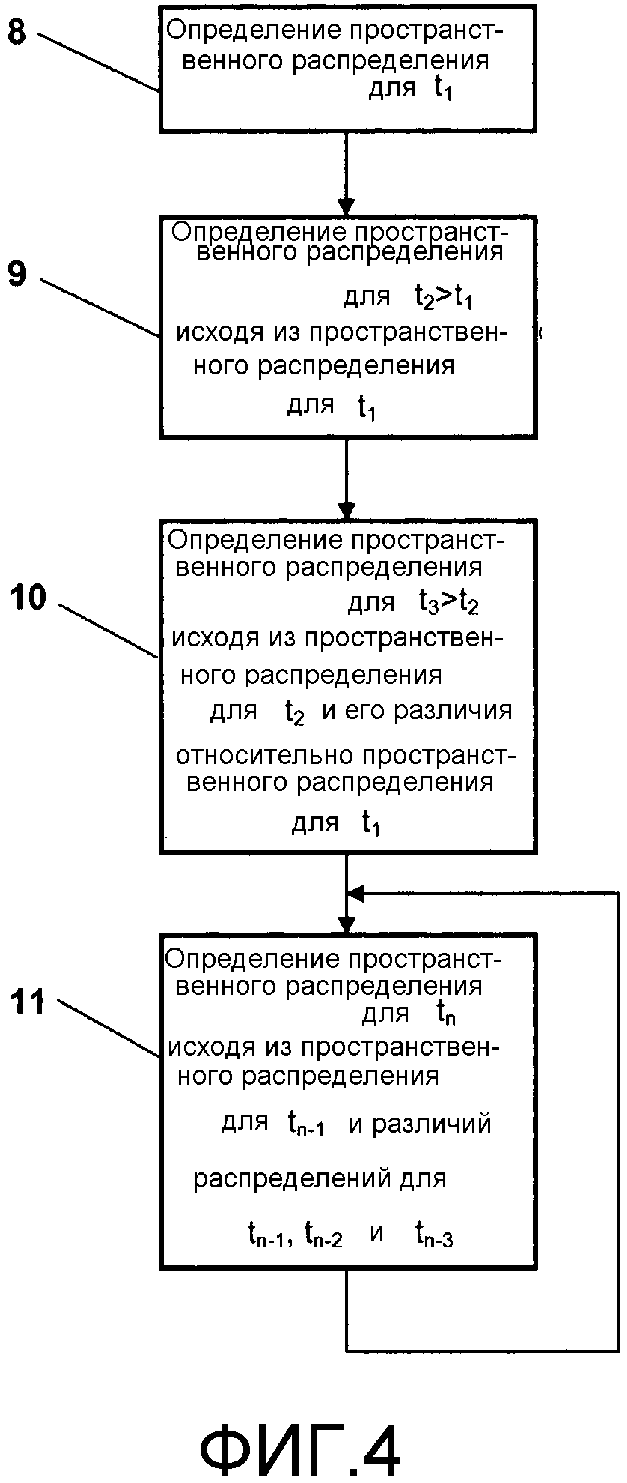
1. Способ определения изменяющегося пространственного распределения частиц (1) во множество моментов времени (tn-4, tn-3, tn-2, tn-1, tn), следующих друг за другом с временными интервалами, который для каждого из моментов времени (tn-4, tn-3, tn-2, tn-1, tn) содержит следующие этапы:
получение реальных двумерных изображений частиц (1) с различными эффективными функциями отображения в соответствующий момент времени (tn-4, tn-3, tn-2, tn-1, tn);
задание оцененного пространственного распределения частиц (1);
вычисление виртуальных двумерных изображений оцененного пространственного распределения с различными функциями отображения;
регистрацию различий (5) между виртуальными двумерными изображениями и реальными двумерными изображениями с теми же самыми функциями отображения; и
изменение оцененного пространственного распределения частиц (1) для уменьшения различий (5), чтобы получить пространственное распределение, приближенное к фактическому пространственному распределению частиц (1) в момент времени;
отличающийся тем, что оцененное пространственное распределение частиц (1) задают для по меньшей мере одного момента времени (tn) посредством того, что положения отдельных частиц (1) в полученном для другого момента времени (tn-1) приближенном пространственном распределении сдвигают в зависимости от того, как их положения сдвигались между приближенными пространственными распределениями для по меньшей мере двух других моментов времени (tn-3, tn-2, tn-1).
2. Способ по п. 1, отличающийся тем, что приближенное пространственное распределение, полученное для другого момента времени (tn-1), является пространственным распределением, которое было получено для по меньшей мере одного момента времени (tn-1), последнего перед или следующего после момента времени (tn).
3. Способ по п. 1 или 2, отличающийся тем, что приближенные пространственные распределения для по меньшей мере двух более ранних моментов времени (tn-2, tn-1) включают пространственные распределения, которые были получены для последнего и предпоследнего перед или последующего и следующего за ним момента времени (tn-2, tn-1), лежащего после по меньшей мере одного момента времени (tn).
4. Способ по любому из предыдущих пунктов, отличающийся тем, что оцененное пространственное распределение частиц (1) задают для по меньшей мере одного момента времени (tn), при этом из приближенных пространственных распределений для по меньшей мере двух других моментов времени (tn-2, tn-1) определяют траектории (6) отдельных частиц (1) и экстраполируют до по меньшей мере одного момента времени (tn).
5. Способ по п. 4, отличающийся тем, что траектории (6) определяют из приближенных пространственных распределений для более чем двух других моментов времени (tn-3, tn-2, tn-1).
6. Способ по п. 5, отличающийся тем, что частицы (1) с прерывистыми траекториями идентифицируют и исключают из приближенных пространственных распределений.
7. Способ по п. 5 или 6, отличающийся тем, что частицы (1) с траекториями (6), которые отклоняются от решений Навье-Стокса для потока флюида, заполненного частицами, более чем на заранее определенную величину, идентифицируют и исключают из приближенных пространственных распределений.
8. Способ по любому из пп. 5-7, отличающийся тем, что, когда частица (1), траектория которой отслеживалась по нескольким более ранним моментам времени, отсутствует в реальных изображениях, полученных в некоторый момент времени, но вновь появляется в реальных изображениях, полученных в более поздние моменты времени, на устойчивом продолжении той же траектории, положение частицы (1) дополняют в пространственном распределении, определенном для упомянутого некоторого момента времени, на продолженной траектории.
9. Способ по любому из предыдущих пунктов, отличающийся тем, что при регистрации различий (5) между виртуальными двумерными изображениями и реальными двумерными изображениями зарегистрированные с теми же функциями отображения отсутствующие в реальных изображениях частицы (1) исключают из приближенного пространственного распределения.
10. Способ по любому из предыдущих пунктов, отличающийся тем, что при регистрации различий (5) между виртуальными двумерными изображениями и реальными двумерными изображениями зарегистрированные с теми же функциями отображения дополнительные частицы (1) в реальных изображениях вводят в приближенное пространственное распределение.
11. Способ по любому из предыдущих пунктов, отличающийся тем, что пространственные распределения частиц для моментов времени между первым моментом времени (tn+3) и гораздо более поздним вторым моментом времени (tm-3) определяют один раз, исходя из первого момента времени (tn+3), для последующих моментов времени (tn+i+3) и один раз, исходя из второго момента времени (tm-3), для предыдущих моментов времени (tm-j-3).
12. Способ по п. 11, отличающийся тем, что частицы (1), которые содержатся только в одном из обоих пространственных распределений, определенных для одного из моментов времени между первым моментом времени (tn+3) и вторым моментом времени (tm-3), дополняют в другом пространственном распределении для этого момента времени.
13. Способ по любому из предыдущих пунктов, отличающийся тем, что при изменении оцененного пространственного распределения частиц (1) для уменьшения различий (5), пространственные положения частиц (1), которые в оцененном пространственном распределении являются близко расположенными, изменяют скоординированным образом.
| US 2011299738 A1, 08.12.2011 | |||
| МОДЕЛЬ ОПРЕДЕЛЕНИЯ КЛЮЧЕВОГО КАДРА АТРИБУТА СОПРЯЖЕННЫХ ОБЪЕКТОВ | 2005 |
|
RU2378698C2 |
| CN 102445692 A, 09.05.2012 | |||
| US 2003085703 A1, 08.05.2003 | |||
| Новиков Ю | |||
| А | |||
| "Виртуальный растровый электронный микроскоп | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Принципы построения прибора." Микроэлектроника, т | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Автоматический переключатель для пишущих световых вывесок | 1917 |
|
SU262A1 |

