Область техники
Изобретение относится к радиотехнике, а именно к методам и системам пассивной радиолокации, т.е. определения местоположения в трехмерном пространстве источника радиоизлучения (ИРИ) за счет приема и последующей обработки электромагнитных волн, порожденных этим ИРИ.
Изобретение используется для решения технической задачи, состоящей в определении координат летательного аппарата на этапе его захода на посадку в целях наблюдения за ним и контроля его движения наземными службами, а также в целях его навигационного сопровождения. Достигаемый технический результат состоит в повышении точности оценки координат подвижного объекта, оснащенного источником радиоизлучения.
Уровень техники
Высокий уровень требований по безопасности полетов и значительная загрузка инфраструктуры существующих аэропортов определяет потребность в системах, позволяющих определять с высокой точностью координаты воздушного судна при его заходе на посадку. Основные классы систем поддержки посадки, такие как курсоглиссадные системы (КГС), разработанные в середине XX века, функционируют по сравнительно простым принципам, что определило их широкое распространение и ведущее положение [1]. Такие системы состоят из двух размещенных на земле передающих систем: курсового и глиссадного маяков. Маяки работают по схожим принципам - их антенные системы формируют два узких луча, смещенных в разные стороны относительно установленного направления посадки воздушного судна. В каждом луче передается пространственно-модулированный сигнал; после детектирования сигналов бортовым приемником по разности глубины модуляции определяется текущее отклонение воздушного судна от установленного направления.
Однако качество работы КГС и схожих с ней по принципу действия систем посадки микроволнового диапазона существенно снижается в тех случаях, когда диаграммы направленностей антенн курсового и глиссадного маяков претерпевают искажения. Такие искажения возникают из-за объектов, искусственных и естественных, размещенных в зоне действия маяков, например, зданий, сооружений, особенностей ландшафта, залежей минеральных руд и водоносных слоев. Также кратковременные искажения могут возникнуть из-за других летательных аппаратов, находящихся в воздухе и совершающих маневры на земле, а также служебных транспортных средств служб аэропорта.
Одним из способов обеспечить требуемый уровень безопасности при возрастающей загрузке существующих аэропортов, а также создания новых аэропорт в зонах интенсивного хозяйственного использования или в суровых климатических условиях является использование систем сопровождения посадки, функционирующей на основе принципов распределенной пассивной радиолокации, отличных от методов определения местоположения по равносигнальному направлению.
Существующие системы и комплексы оценки местоположения ИРИ на основе приема создаваемых им электромагнитных волн и последующей обработки сигналов могут быть разделены на два основных типа. К первому типу относят системы, состоящие из узкобазовых подсистем, реализующих угломерный метод оценки на основе фазовых пеленгаторов, а ко второму типу относят широкобазовые системы, реализующие разностно-дальномерный метод оценки, в основе которого лежит вычисление разности прихода сигнала между точками, разнесенными на расстояния, соизмеримые с расстоянием от точек приема до ИРИ, но на два и более порядка превышающие длину волны несущей, или центральной, частоты радиосигнала.
За последние десятилетия более широкое распространение получили системы, использующие угломерный принцип измерения координат на основе фазового пеленгатора. Так в патенте [2] рассмотрен метод фазовой пеленгации и структурная схема фазового пеленгатора для определения местоположения ИРИ сложных сигналов за счет формирования двух шкал оценки пеленга: точной, но неоднозначной, и однозначной, но грубой. Последующее объединение двух измерений позволит, по мнению авторов [2], повысить точность при сохранении однозначности. В патенте [3] предложен фазовый пеленгатор, в котором неоднозначность отсчета угловой координаты α устраняется автокорреляционной обработкой принимаемых сложных сигналов. Предлагаемые в [3] технические решения, по мнению их авторов, будут инвариантны к нестабильности несущей частоты принимаемых сигналов, в виду их модуляции и ширине спектра, а точное и однозначное измерение угловой координаты α будет осуществляться на стабильной частоте Ω опорного генератора.
Также известны прототипы систем, реализующих разностно-дальномерный способ необходимо отметить следующий аналог. Так в патенте [4] представлен способ одновременной оценки углов азимута и места направления на ИРИ с использованием широкобазового разностно-дальномерного оценивателя путем решения задачи пересечения трехмерных гиперболических поверхностей, а в патенте [5] представлен основанный на тех же принципах способ оценки непосредственно координат ИРИ. В [4] и [5] достигается посредством того, что при пеленговании ИРИ тремя антеннами образуют две измерительные базы, и после измерения разностей времен приема сигнала и вычисления значения азимута ИРИ, дополнительно вычисляют значение угла места ИРИ и измеряют плотности потока мощности сигнала ИРИ в точках размещения двух антенн, а также вычисляют дальность до ИРИ от точки на линии пеленга. Ключевым недостатком предложенного решения является детерминированная модель принимаемых сигналов, что исключает возможность априорного (без проведения численного или натурного моделирования) расчета точности получаемых оценок и не предполагает расширение системы для использования более трех приемных антенн.
Наиболее близким по технической сущности и достигаемому техническому результату к предлагаемому комплексу является комплекс, реализующий угломерно-разностно-дальномерный способ определения координат источника радиоизлучения, включающий приемно-пеленгаторные пункты с корреляционной обработкой сигналов между которыми установлена линия радиосвязи, описанный в монографии [6], с. 494…510. Теоретические основы алгоритмов обнаружения ИРИ, сходных по набору операций с алгоритмами оценивания местоположения ИРИ, используемыми в настоящем изобретении, изложены в монографии [7], с. 256…279.
Раскрытие изобретения
Техническая задача изобретения состоит в повышении точности оценки вектора координат, описывающего местоположение источника радиоизлучения.
Результат достигается способом централизованной обработки сигналов, полученных в результате приема электромагнитных колебаний в точках, размещение которых в пространстве определяется оптимальной группировкой слабонаправленных антенных элементов внутри структурных блоков, реализованных отдельными техническими средствами распределенного комплекса.
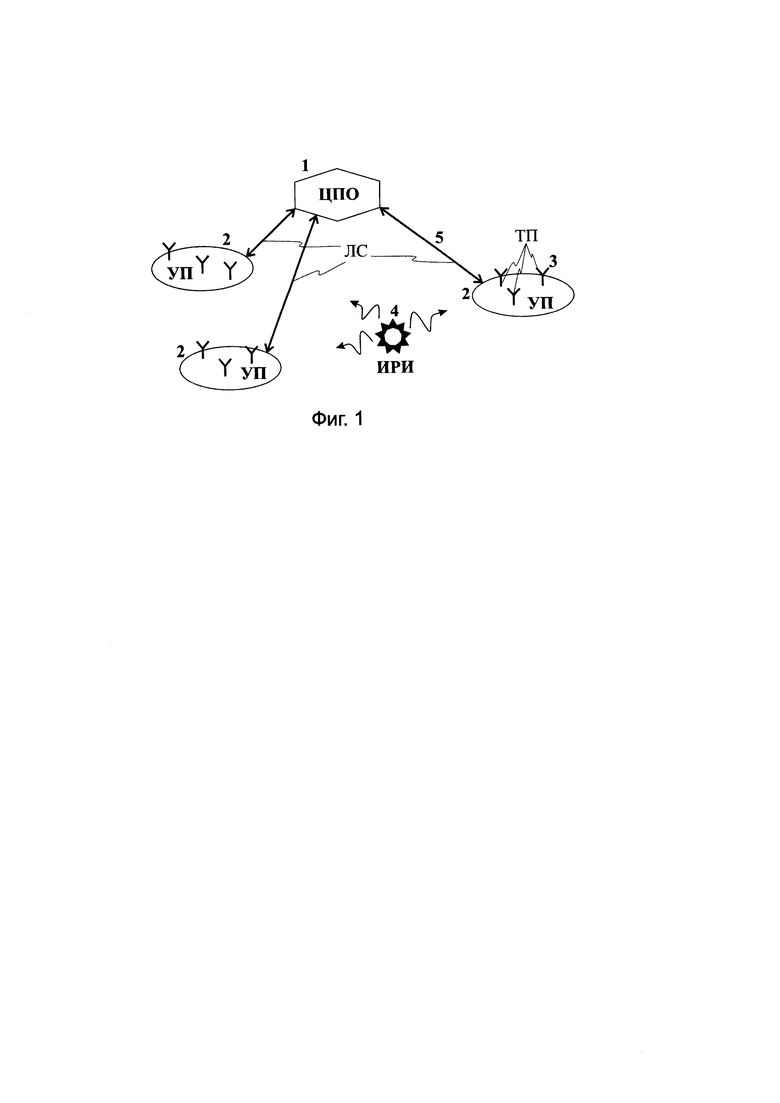
Решение поставленной задачи достигается созданием распределенного пассивного радиолокационного комплекса, структурная схема которого представлена на фиг. 1. Комплекс состоит из нескольких (двух и более) узкобазовых подсистем (УП) (2), включающих в себя отдельные точки приема (ТП) (3), и центрального пункта обработки (ЦПО) (1), соединенными проводными или беспроводными линиями связи (ЛС) (5), обеспечивающими высокую скорость передачи информации, пропускная способность сети не менее 100 Мбит/с.
Источник радиоизлучения (ИРИ) (4) порождает электромагнитный сигнал, для описания которого используется модель гауссовского радиосигнала:

где K - число учитываемых составляющих, f0 - несущая частота, fk - частоты учитываемых составляющих в спектре комплексной огибающей, аk и bk - коэффициенты, являющиеся гауссовскими взаимно-независимыми случайными величинами. Такой сигнал соответствует случаю стохастической модели, применение которой обеспечивает работу системы в условиях наименьшей доступной априорной информации.
Узкобазовая подсистема (УП) представляет собой технически единую приемную станцию, реализующую многоканальный прием в отдельных точках приема (ТП), размещение которых в структуре антенной системы УП удовлетворяет двум условиям:
1. Расстояние между ТП одной и той же УП намного меньше расстояния между УП и ИРИ. Данное условие обеспечивает плоский фронт волны.
2. Расстояние между ТП одной и той же УП не превышает половины длины волны λ0=c/f0, соответствующей несущей, или центральной, частоте принимаемого радиосигнала f0, а под с понимается скорость распространения сигнала от ИРИ до УП, равная скорости света.
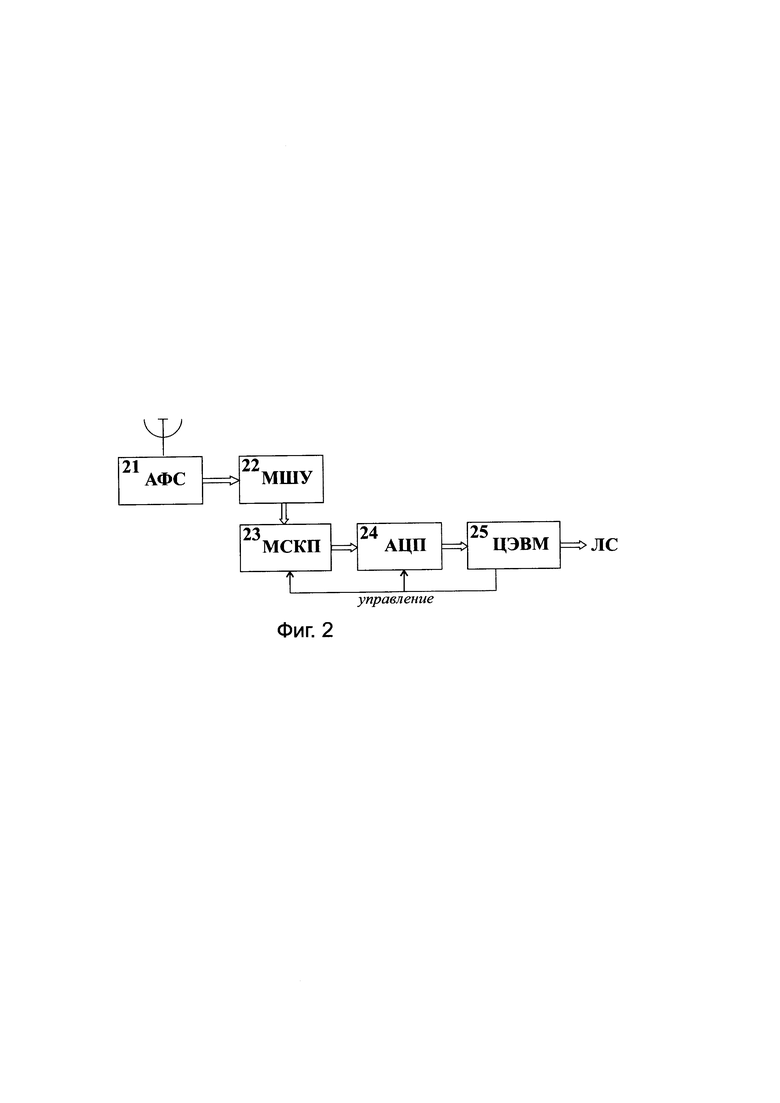
Структурная схема станции, реализующей УП которой представлена на фиг. 2. УП состоит из антенно-фидерной системы (АФС) (21), блока малошумящих усилителей (МШУ) (22), многоканального синхронного квадратурного приемника (МСКП) (23), блока аналого-цифровых преобразователей (АЦП) (24) и цифровой ЭВМ (ЦЭВМ) (25), соединенной линией связи (ЛС) (5) с ЦПО. Блок МШУ осуществляет предварительное усиление сигналов до его передачи на вход МСКП. Блоки МСКП, АЦП являются программно-управляемыми, режим работы которых задается управляющими сигналами ЦЭВМ. При приеме электромагнитные колебания превращаются в аналоговый электрический радиосигнал, который поступает на вход МШУ, с выхода которого радиосигнал поступает на вход МСКП. В результате синхронного детектирования на выходе МСКП формируется аналоговый видеосигнал, поступающий в форме пар квадратур на вход АЦП, на выходе которого формируется цифровой сигнал в форме отсчетов.
Отличительными характеристиками МСКП являются центральная частота, перестраиваемая в широких пределах: от 20 МГц до 3 ГГц, и широкая полоса частот демодулируемого сигнала, составляющая величину до 60 МГц, что определяет сигнал как широкополосный в верхней части диапазона центральной частоты, и как сверхширокополосный в его нижней части. Для достижения требуемого качества приема независимое цифровое управление усилением каждого канала осуществляется с шагом 0,5 дБ, а синхронизация каждой пары каналов квадратурного приемника должна обеспечивать фазовое различие точность квадратур не более 2 градусов по абсолютной величине. Для получения технического результата применяется многоканальный 16-разрядный многоканальный АЦП с перестраиваемой частотой дискретизации, при этом максимальная частота составляет 100 МГц, что с учетом защитных интервалов согласуется с максимальной полосой принимаемого радиосигнала. Синхронность взятия отсчетов в различных каналах АЦП должна обеспечивать рассогласование моментов времени не более 0,05 от используемого периода дискретизации.
ЦЭВМ реализуется на основе высокопроизводительной многопроцессорной рабочей станции, оснащенной не менее чем двумя многоядерным универсальным процессорами класса Intel Xeon с рабочей частотой не менее 1,8 ГГц, и оперативным запоминающих устройством (ОЗУ), объемом не менее 8 ГБ. ЦЭВМ в структуре осуществляет функции управления работой УП за счет задания функциональных режимов отдельных блоков. Кроме этого ЦЭВМ выполняет предварительную цифровую обработку принятых сигналов, а также их компрессию перед передачей по линии связи.
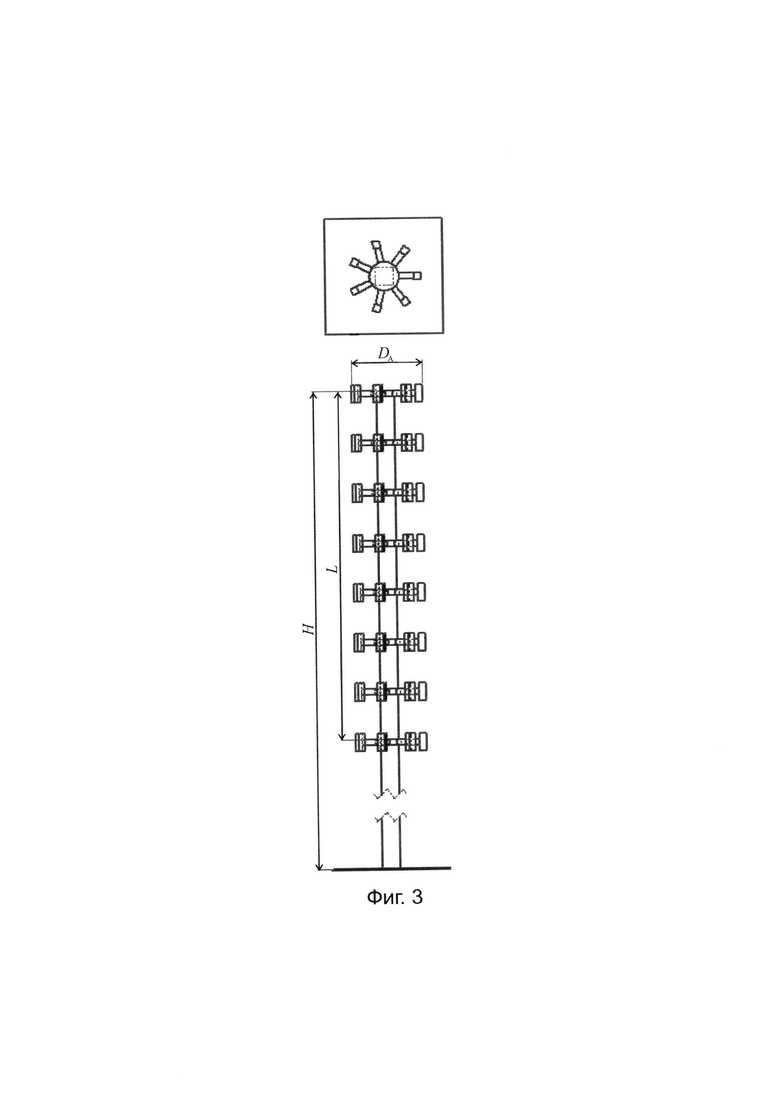
Антенная система УП размещается на вертикальной мачте, высота которой H составляет от 1,5 до 18 м; пример мачты представлен на фиг. 3. В верхней части мачты, на протяжении участка длины L, размещаются от одной до девяти кольцевых антенных подрешеток (КАПР). Минимальное расстояние между планарными КАПР составляет 0,5 м, что обуславливается технологическими особенностями крепления, а максимальное ограничено протяженностью рабочего участка мачты L.
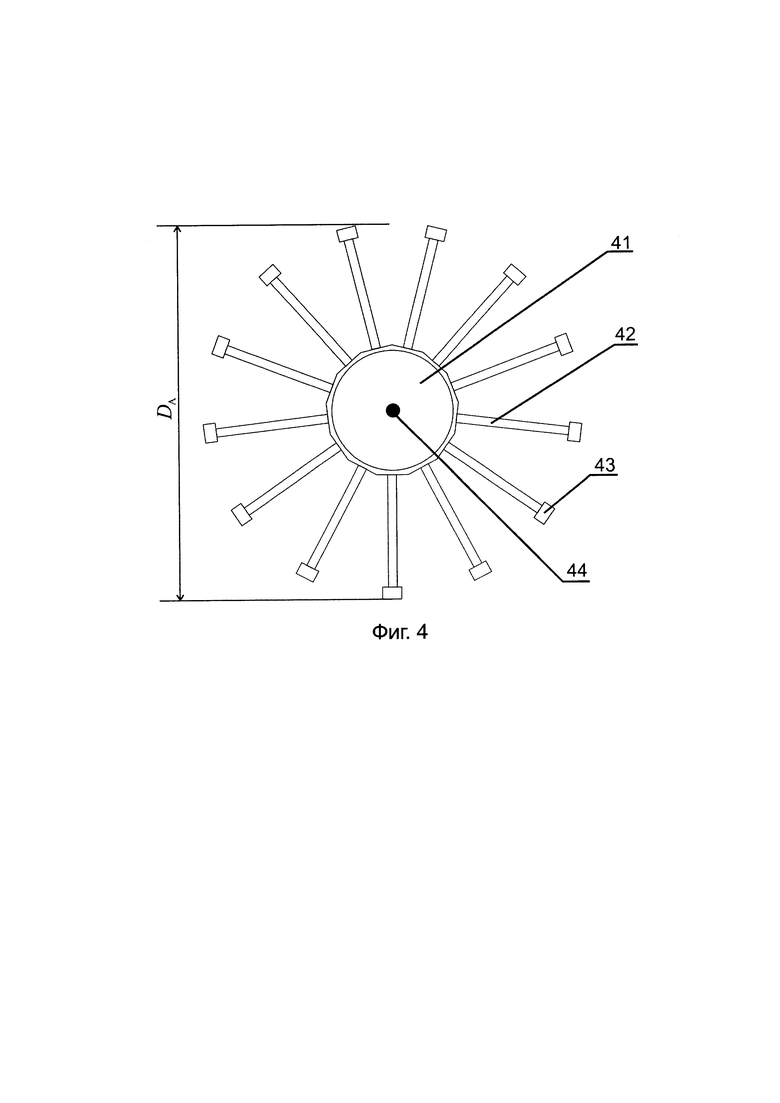
Конструктивно одна такая подрешетка с 13 элементами представлена на фиг. 4. При размещении она может быть установлена на необходимой высоте, посредством закрепления центрального блока (41), имеющего форму диска на мачте. К центральному диску крепятся штанги (42), на концах которых располагаются приемные элементы (43). Штанги выполнены из металлического сплава и жестко закрепляются с центральной частью посредством резьбовых соединений. Внутри каждой штанги расположен кабель, обеспечивающий передачу сигнала от антенного элемента; таким образом, металлическая оболочка штанги выполняет не только защитную механическую функцию, но и экранирующую функцию. При сборке данного изделия могут быть использованы штанги длинной от 0,5 до 2 м, что соответствует диаметру DA собранного изделия от 0,9 до 4,4 м. В центре дискового элемента может быть установлен дополнительный антенный элемент (44), выполненный в виде штыревой антенны. Данный элемент используется на этапе калибровки антенной системы: во-первых, для обеспечения одинаковой величины времени прихода сигнала по соединительным электрическим линиям от каждого из элементов, во-вторых, для дополнительного контроля правильной пространственной ориентации каждого из антенных элементов, закрытого защитным кожухом.
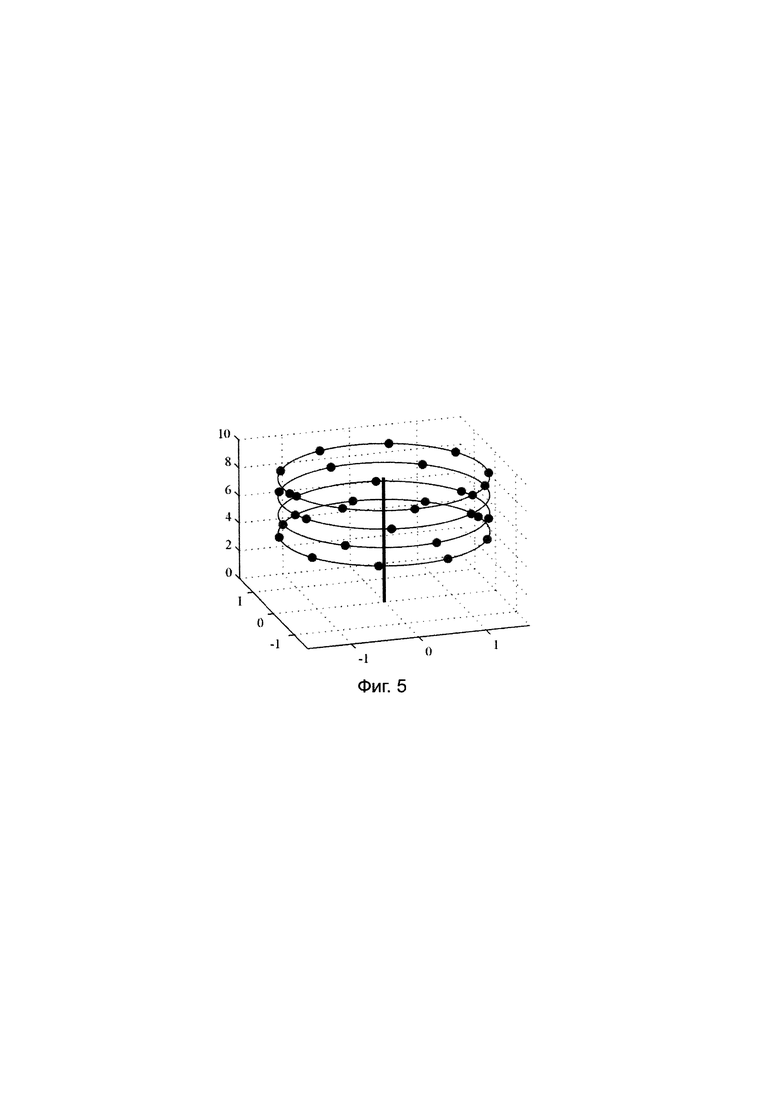
Число элементов, размещаемых в каждой кольцевой подрешетке, может быть от 3 до 13. Радиусы подрешеток и количество антенных элементов, входящих в них, могут быть как одинаковыми, так и различными в структуре единой АФС УП. Каждая подрешетка имеет степень свободы, обусловленную ее поворотом относительно центральной оси мачты, что позволяет сориентировать отдельные решетки за счет угла поворота каждой кольцевой антенной подрешетки относительно других подрешеток системы. На фиг. 5 представлен пример синтезированной предложенным способом цилиндрической антенной системы УП в виде пространственной решетки, элементы которой располагаются на боковой поверхности цилиндра в псевдохаотическом порядке, предотвращающем появление выделенных направлений максимумов и нулей в диаграмме направленности антенной системы.
Структурная организация распределенной приемной системы пассивного радиолокационного комплекса описанным образом, позволяет сформировать на приеме необходимое пространственное распределение электромагнитного поля сигнала, излученного ИРИ.
Пусть ИРИ расположен в точке пространства, координаты которой заданы вектором r=(X, Y, Z)T. Тогда сигнал, принятый m-ой ТП, состоящей в структуре m-ой УП представляет собой сумму задержанного и взвешенного полезного сигнала и аддитивного шума:

где an - амплитуда сигнала на входах ТП n-й УП;  ;
;  - время прохождения сигнала от ИРИ до условного фазового центра (УФЦ) n-й УП;
- время прохождения сигнала от ИРИ до условного фазового центра (УФЦ) n-й УП;  - координаты УФЦ n-й УП; χn - ошибка привязки сигнала по времени;
- координаты УФЦ n-й УП; χn - ошибка привязки сигнала по времени;  - время прохождения сигнала от УФЦ до ТП (от ТП до УФЦ, если ςnm<0);
- время прохождения сигнала от УФЦ до ТП (от ТП до УФЦ, если ςnm<0);  - координаты m-й ТП n-й УП;
- координаты m-й ТП n-й УП;  ; αn, βn - азимут и угол места луча, направленного из n-й УП на ИРИ; с - скорость распространения сигнала.
; αn, βn - азимут и угол места луча, направленного из n-й УП на ИРИ; с - скорость распространения сигнала.
Отличительное условие, обеспечивающее эффективное использование данной модели, состоит в том, что время наблюдения сигнала на каждой позиции должно быть выбрано много больше времен корреляции и сигнала и помехи. Цифровые отсчеты всех принятых сигналов передаются по высокоскоростным линиям связи в центр обработки данных, расположенный в структуре ЦПО. Цифровые сигналы, принятые отдельными ТП, рассматриваются совместно и формируют многомерный цифровой сигнал.
Оценка координат производится с использованием комбинированного угломерного и разностно-дальномерного способа оценивания, при котором вся распределенная система рассматривается как комбинированная пассивная система (КПС), сочетающую в себе общие черты широкобазовой пассивной системы (ШбПС) и пассивной системы, состоящей из узкобазовых подсистем (ПСУП). В основе метода оценивания такой системы лежит способ вычисления оценки разности прихода сигналов на основе корреляционного приема по методу максимального правдоподобия, который для двух точек приема представлен в зарубежной работе [8]. Похожий способ, также представлен в патенте [9], однако предложенный там способ не является оптимальным с точки зрения минимума дисперсии получаемых оценок, поскольку задействует усеченный случай одного из типичных оценивателей, описание которого приведено в работе [8].
Развитие теоретических основ корреляционного метода для возможности его применения к решению задачу местоопределения ИРИ описано в работе [10]; базируясь на предложенном подходе, предлагаемый способ выполняет построение целевой функции относительно вектора оцениваемых параметров r, содержащего три координаты источника излучения. Затем осуществляется поиск максимума целевой функции с использованием широко известных методов [11], таких как метод наискорейшего спуска первого порядка или метод Ньютона второго порядка. Доставляющий максимум целевой функции вектор rmax полагается решением задачи определения местоположения. Такой способ оценки является одноэтапным и позволяет исключить вычисление промежуточных оценок для времен задержек и углов пеленга, что позволяет уменьшить вероятности появления аномальных ошибок при отношениях сигнал-шум менее 10 дБ.
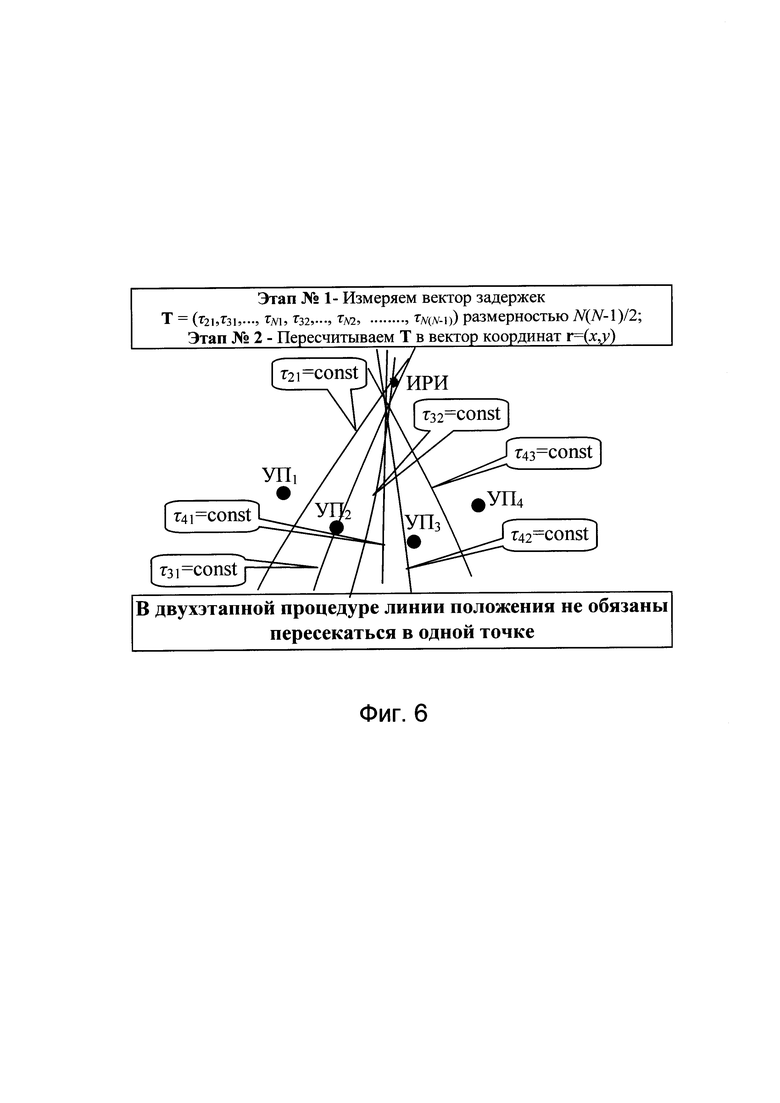
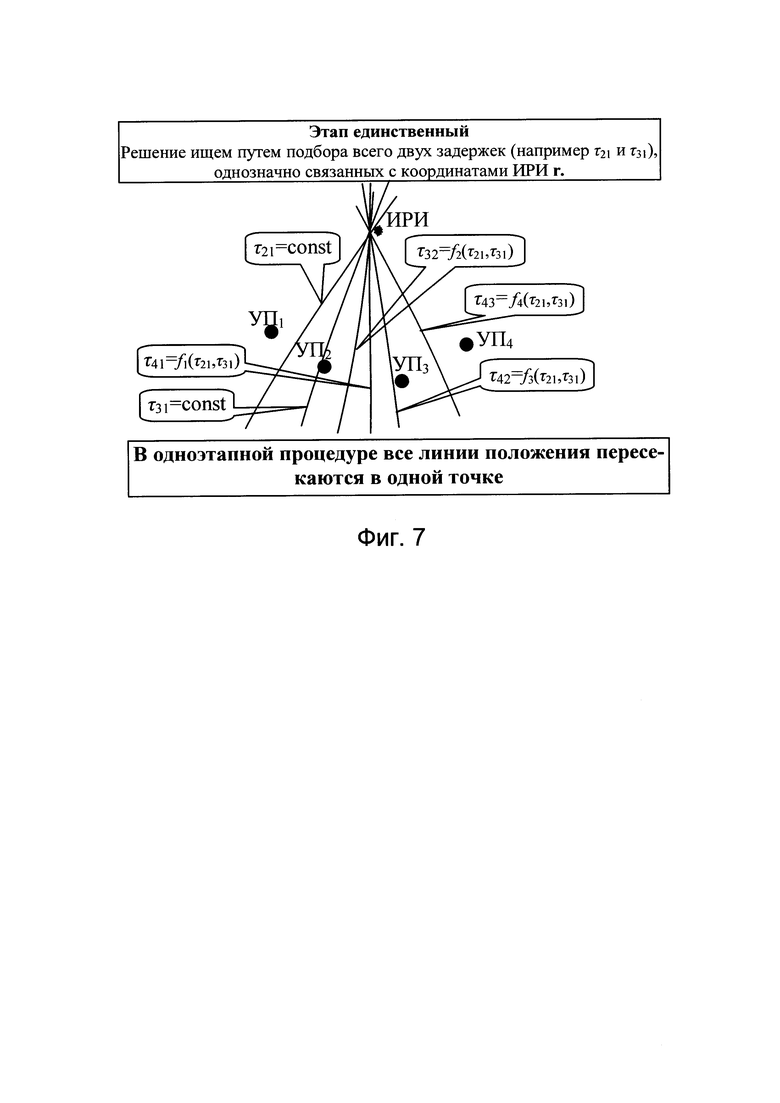
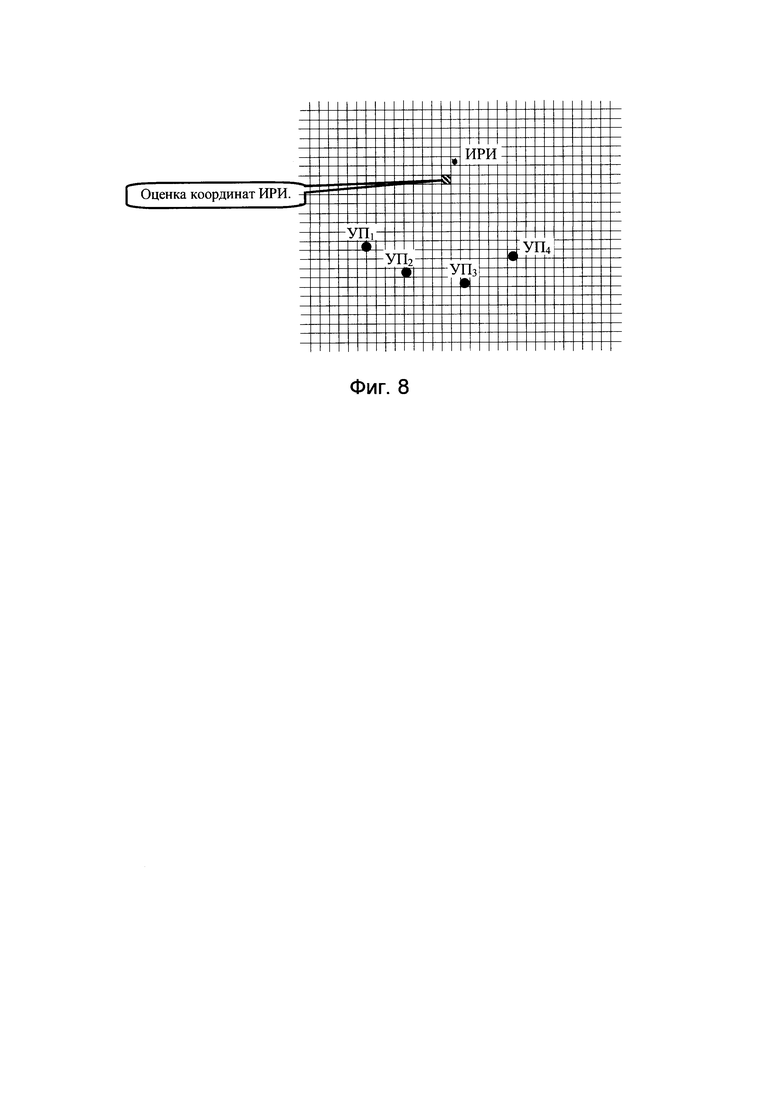
Для пояснения отличия одноэтапного метода от двухэтапного служит следующая схема, выполненная на примере двумерного разностно-дальномерного оценивателя. При проведении двухэтапного оценивания, проиллюстрированного фиг. 6, на первом этапе измеряется вектор взаимных задержек между N станциями приема Т=(τ21, τ31,…, τN1, τ32,…, τN2, τN(N¬-1)) размерностью N(N-1)/2, а на втором этапе вектор T пересчитываем в вектор координат r с использованием, например, таких подробно описанных процедур, как среднеквадратическое приближение [12]. При этом каждой паре задержек соответствует своя линия положения; но в силу наличия неустранимых шумов все линии положения не могут пересечься в единственной точке. При выполнении одноэтапного оценивания непосредственно ищется единственная точка пересечения, которая определяется из минимального числа функционально независимых задержек, что проиллюстрировано фиг. 7. При этом поиск такой точки ведется путем разбиения области поиска на ячейки достаточно малого объема и вычисления целевой функции в каждой из них, как представлено на фиг. 8. Ячейка с максимальным значением определяет положение с точностью до размера ячейки.
Отличительной особенностью предлагаемого метода является то, что используя дополнительные эвристические предположения, подтверждаемые натурными экспериментами, о возможности пренебрежения некоторыми параметрами, выражение целевой функции в форме может быть записано в форме:

где функции J2(r) и J3(r) отвечают за вклад компонент, порожденных ПСУП и ШбПС, соответственно. Используемые компактные выражения для их вычисления имеют следующий вид:


где N - количество УБП, Mn - количество точек приема (антенных элементов) в каждой УБП (могут быть одинаковыми или различными), f0 - несущая частота, 2Δf - полоса анализа сигнала. Через τϕnm обозначены фазовые задержки m-ой ТП для n-ой УБП, а через τΔn - временные задержки огибающих сигнала: обе группы параметров являются функциями вектора r. Так, эти зависимости  и
и  от r выражаются следующим образом:
от r выражаются следующим образом:

где с - скорость света, rn - радиус-вектор центра n-ой УБП, а rnm - радиус вектор m-ой точки приема, входящий в состав n-ой УБП.
Входящие в формулу (1) выражения Unm(f) обозначают нормализованные спектры в m-ой точке приема n-ой УБП:

где Xnm(f) измеренный спектр, Wnm(f) - спектральная плотность мощности, а qmn(f) - отношение сигнал-шум.
Комплексные спектры Xnm(f) вычисляются с использованием алгоритма быстрого преобразования Фурье:

где Тн - время наблюдения; ν - номер частотного канала; L - число отсчетов сигнала, рассчитываемое как целая часть отношения Тн/Т∂, где Т∂ - период дискретизации; xnm[l] - отсчеты сигнала, получаемые на выходе АЦП, связанные с отсчетами принятого сигнала соотношением  .
.
Источники информации
1. Авиационная радионавигация. Справочник под ред. Сосновского А.А., М.: Транспорт, 1990.
2. Патент 2290658, Фазовый способ пеленгации и фазовый пеленгатор для его осуществления / Дикарев В.И., Журкович В.В., Сергеева В.Г.; патентообладатели: Дикарев В.И., Журкович В.В., Сергеева В.Г. - 2005116177/09; заявл. 20.02.2002; опубл. 27.12.2006, бюл. 36. - 9 с.
3. Патент 2365931, Российская Федерация, G01S 3/46 (2006.01). Фазовый способ пеленгации и фазовый пеленгатор для его осуществления / Ипатов А.В., Дикарев В.И., Койнаш Б.В., Финкельштейн A.M.; патентообладатель: Институт прикладной астрономии Российской академии наук. - 2007137141/09; заявл. 08.10.2007; опубл. 27.08.2009, бюл. 24. - 12 с.
4. Патент 2325666, Российская Федерация, G01S 3/46 (2006.01). Разностно-дальномерный способ пеленгования источника радиоизлучения / Сайбель А.Г., Сидоров П.А.; патентообладатель: Военно-космическая академия имени А.Ф. Можайского. - 2006122641/09; заявл. 23.06.2006; опубл. 27.05.2008, бюл. 15. - 14 с.
5. Патент 2363010, Российская Федерация, G01S 3/46 (2006.01). Дальномерно-разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство / Сайбель А.Г., Вайгель К.И., Михайлов М.И.; патентообладатель: Военно-космическая академия имени А.Ф. Можайского. - 2007121229/09; заявл. 06.06.2007; опубл. 27.07.2009, бюл. 21. - 16 с.
6. Теоретические основы радиолокации, под ред. Ширмана Я.Д., - М.: Сов. Радио, 1970. - 560 с.
7. Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь, 1993. - 416 с.
8. Knapp С.Н., Carter G.C., The Generalized Correlation Method for Estimation of Time Delay // IEEE Transactions on Acoustic, Speech and Signal Processing, 1976, vol. 24, no. 4, pp. 320-327.
9. Патент 2474835, Российская Федерация, G01S 3/46 (2006.01). Корреляционно-фазовый пеленгатор / Чеботарев А.С., Аванесян Г.Р., Жуков А.О., Турлов З.Н., Смирнова О.В.; патентообладатель: Открытое акционерное общество «Особое конструкторское бюро Московского энергетического института». - 2011139169/07; заявл. 26.09.2011; опубл. 10.02.2013, бюл. 4. - 7 с.
10. Дубровин А.В., Сосулин Ю.Г., Одноэтапное оценивание местоположения источника радиоизлучения комбинированной пассивной системой // Радиотехника и электроника, 2007, т. 52, №4, с. 441-457.
11. Nocedal J., Numerical Optimization, 2nd ed., Springer, 664 pp.
12. Torrieri D.J., Statistical Theory of Passive Location Systems // IEEE Transactions on Aerospace and Electronic Systems, 1984, vol. 20, no. 2, pp. 183-198.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система пассивной локации для определения координат летательного аппарата в ближней зоне аэродрома и на этапе захода на посадку с резервным каналом определения дальности | 2016 |
|
RU2633380C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ВЫСОКОТОЧНОГО ОДНОЭТАПНОГО ПЕЛЕНГАТОРА И АДРЕСНО-ОТВЕТНОЙ ПАКЕТНОЙ ЦИФРОВОЙ РАДИОЛИНИИ В ДКМВ ДИАПАЗОНЕ | 2016 |
|
RU2613369C1 |
| АДАПТИВНАЯ РАДИОЛИНИЯ ПЕРЕДАЧИ ДАННЫХ ДЕКАМЕТРОВОГО ДИАПАЗОНА РАДИОВОЛН | 2017 |
|
RU2658591C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО НЕЗАВИСИМОГО ВОЗДУШНОГО НАБЛЮДЕНИЯ В ДАЛЬНЕЙ ЗОНЕ НАВИГАЦИИ | 2017 |
|
RU2663182C1 |
| ОДНОЭТАПНЫЙ МЕТОД ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ В ДКМВ ДИАПАЗОНЕ С ПРИМЕНЕНИЕМ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ, СОСТОЯЩЕЙ ИЗ ВЗАИМНО ОРТОГОНАЛЬНЫХ СИММЕТРИЧНЫХ ГОРИЗОНТАЛЬНЫХ ВИБРАТОРОВ | 2016 |
|
RU2614035C1 |
| СИСТЕМА ДЕКАМЕТРОВОЙ СВЯЗИ ЧЕРЕЗ ИОНОСФЕРУ | 2017 |
|
RU2680312C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2305851C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2339966C1 |
Изобретение относится к радиотехнике, а именно к методам и системам пассивной радиолокации, и предназначено для получения точных оценок местоположения заходящего на посадку летательного аппарата по излучаемому с его борта радиосигналу, и представляет собой комплекс радиоэлектронных средств, который содержит не менее двух узкобазовых подсистем, соединенных высокоскоростными линиями передачи информации с центральным пунктом обработки. Достигаемый технический результат – повышение точности оценки вектора координат, описывающего местоположение источника радиоизлучения. Указанный результат достигается за счет того, что узкобазовая подсистема оснащена активной фазированной многокольцевой антенной решеткой и осуществляет прием радиосигналов, их синхронную демодуляцию многоканальным квадратурным приемником и преобразование в цифровую форму посредством многоканального аналого-цифрового преобразователя, при этом центральный пункт обработки производит оценку местоположения источника излучения на основе совместной обработки всех принятых сигналов с использованием комбинированного одноэтапного алгоритма, состоящего в формировании решающей функции на основе метода максимального правдоподобия и ее последующей оптимизации и исключающего выполнение промежуточных вычислений временных и фазовых задержек и углов пеленга. 3 н.п. ф-лы, 8 ил.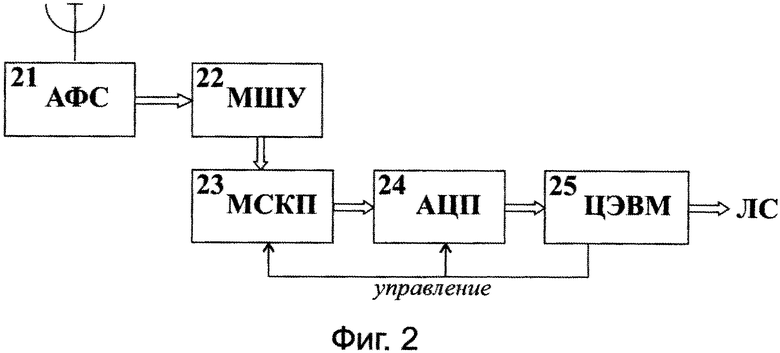
1. Многопозиционный пассивный радиолокационный комплекс, предназначенный для определения местоположения источника радиоизлучения (ИРИ) в пространстве, состоящий из двух или более разнесенных в пространстве узкобазовых подсистем (УП), которые соединены высокоскоростными проводными или беспроводными каналами связи с центральным пунктом обработки информации (ЦПО), формирующим оценку координат ИРИ на основе одноэтапного способа оценки местоположения, отличающийся тем, что оценка местоположения ИРИ выполняется в ЦПО комбинированным одноэтапным способом оценки, состоящим в поиске глобального максимума в трехмерном пространстве координат r, описывающих положение ИРИ, комбинированной решающей функции, значение которой вычисляется по следующему правилу: L(r)=Re[J2(r)]+J3(r), в котором функции J2(r) и J3(r) вычисляются на основе нормализованных Фурье-спектров сигналов Unm(J), принятых в точках приема УП соответственно
 ,
,
 ,
,
где N - число УП в комплексе, Mn - количество точек приема в каждой УП, ƒ0 - несущая частота сигнала, 2Δf - полоса анализа сигнала; фазовые задержки сигнала  и временные задержки огибающей сигнала
и временные задержки огибающей сигнала  зависят от координат r следующим образом
зависят от координат r следующим образом  ,
,  ,
,
где с - скорость света, rn - радиус-вектор центра n-й УП, а rnm - радиус вектор m-й точки приема, входящий в состав n-ой УП.
2. Узкобазовая подсистема (УП) для многопозиционного пассивного радиолокационного комплекса, представляющая собой приемную станцию, состоящую из антенно-фидерной системы, соединенной с блоком малошумящих усилителей, выход которого соединен с многоканальным синхронным квадратурным приемником, выход которого соединен с блоком аналого-цифровых преобразователей, соединенным с входом цифровой электронно-вычислительной машины (ЦЭВМ), осуществляющей функции управления многоканальным синхронным квадратурным приемником и блоком аналого-цифровых преобразователей, при этом выход ЦЭВМ соединен линией связи с центральным пунктом обработки, отличающаяся тем, что фазовое различие квадратур каналов многоканального синхронного квадратурного приемника не более 2 градусов, рассогласование моментов времени каналов аналого-цифрового преобразователя не более 5% от периода дискретизации, при этом обеспечивается прием широкополосных радиосигналов с шириной спектров до 60 МГц в диапазоне частот от 20 МГц до 3 ГГц в широком секторе пространственных углов сканирования.
3. Антенно-фидерная система, состоящая из активной фазированной антенной решетки, структурно реализованной в виде системы из кольцевых антенных подрешеток слабонаправленных активных элементов, концентрически размещаемых на разборной вертикальной мачте высотой до 18 м, отличающаяся тем, что формирует относительное, с учетом критерия минимизации среднеквадратической ошибки оценивания параметров, приближение равномерной диаграммы направленности в верхней полусфере за счет размещения от одной до девяти кольцевых подрешеток радиуса от 0,5 до 2 м и с числом элементов от 3 до 13 в каждой подрешетке, а также регулировки расстояния между подрешетками по высоте, с минимальным расстоянием 0,5 м, и угла поворота каждой кольцевой антенной подрешетки относительно других подрешеток.
| Теоретические основы радиолокации | |||
| Под ред ШИРМАНА Я.Д | |||
| Москва, Сов | |||
| Радио, 1970, с.494-510 | |||
| БИОЛОГИЧЕСКИ АКТИВНЫЙ СТИМУЛЯТОР И СПОСОБ ПОВЫШЕНИЯ ОБЩЕЙ НЕСПЕЦИФИЧЕСКОЙ РЕЗИСТЕНТНОСТИ С ЕГО ПРИМЕНЕНИЕМ | 2006 |
|
RU2305551C1 |
| КОГЕРЕНТНО-ИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 2004 |
|
RU2252430C1 |
| WO 2002091018 A1, 14.11.2002. | |||

