Изобретение относится к радиотехнике, а именно к методам и системам пассивной радиолокации, и может быть использовано для определения местоположения в трехмерном пространстве источника радиоизлучения (ИРИ), размещенного на подводных и надводных объектах (ПНО), за счет приема и последующей обработки электромагнитных волн, порожденных этим ИРИ.
В настоящее время значительные усилия направлены на решение задачи обеспечения защиты своих территориальных вод, сил и средств гражданского и военного Флотов от несанкционированных действий иностранных надводных и подводных объектов. Данная задача является комплексной, при решении которой большое внимание уделяется гидроакустическим системам обнаружения надводных и подводных объектов (ПНО) (кораблей, подлодок и др.) на расстояниях до сотен километров от охраняемых рубежей (объектов).
В этих системах обнаружения, как правило, выделяют три контура:
- морской, включающий систему датчиков обнаружения акустических сигналов, излучаемых или отражаемых надводными и подводными динамическими объектами;
- наземный, обеспечивающий обработку информации датчиков с целью выявления и классификации надводных и подводных объектов, а также выдачу интересуемой информации потребителям;
- космический, обеспечивающий прием-передачу информации акустических датчиков при их автономном функционировании.
Морской контур структурно в своем составе имеет стационарные и мобильные гидроакустические системы, эффективность которых существенно повышается в результате сетевого объединения их информационных датчиков.
При сетевом объединении элементов гидроакустического наблюдения (датчиков морского контура системы обнаружения) с элементами наземного и космического контура решается не только задача обнаружения и определения координат источников гидроакустических сигналов, как объектов подводного и надводного размещения, но и слежения за ними с последующей выдачей координатной информации на различные органы управления силами Флотов, в том числе на командные пункты (КП) управления боевыми пилотируемыми и беспилотными самолетами и вертолетами. Такие системы получили название систем освещения надводной и подводной обстановки.
Из открытых источников [1, 2, 3] известно, что ряд стран, имеющих выходы в море, также большое внимание уделяют не только совершенствованию подводных и надводных сил, но и созданию активных и пассивных систем обнаружения морских (океанических) динамических объектов, находящихся в подводном или надводном положении. Так, существенное место в программах вооружения США занимают работы по созданию интегрированных систем освещения подводной и надводной обстановки, основой которых являются гидроакустические комплексы наблюдения, связи и управления. Причем, все объекты данной системы функционируют в единой сети обмена данными. Такое сетевое объединение «абонентов» способствует более эффективному решению задач обнаружения объектов (целей), обработки и передачи данных на заинтересованные пункты управления противолодочными и противокорабельными силами.
Изобретение используется для решения технической задачи, состоящей в определении координат ПНО в целях наблюдения за ними и контроля их движения наземными службами. Достигаемый технический результат состоит в повышении точности оценки координат ПНО, оснащенных источником радиоизлучения.
Радиотехнические средства ПНО при выполнении задач создают активные электромагнитные поля искусственного происхождения в диапазоне частот от 1 МГц до 40 ГГц. Кроме активных полей ПНО создают собственные электромагнитные излучения. Данный спектр излучения может быть использован для решения задачи обнаружения, пеленгации и определения координат ПНО.
При построении многопозиционного пассивного радара используется разностно-дальномерный метод, основанный на измерении разности хода сигнала от цели до приемных антенн радара. Этот метод позволяет работать по импульсным и непрерывным сигналам, в том числе по шумовым и шумоподобным.
Принципиальные особенности метода заключаются в синхронном способе приема сигналов от излучающего источника на разнесенных антеннах. Высокая точность определения координат ПНО обеспечивается за счет корреляционной обработки сигналов, при которой вид принятого сигнала не имеет значения. Определение координат источника осуществляется по разности прихода сигналов на каждую из позиций, а сама разность прихода сигнала к одной позиции относительно другой определяется из положения максимума взаимно-корреляционной функции сигналов от этих позиций.
Наиболее близким техническим решением, отвечающим требованиям пассивного обнаружения и пеленгации, является устройство, описанное в статье «Одноэтапное оценивание местоположения источника радиоизлучения пассивной системой, состоящей из узкобазовых подсистем» (ж. Радиотехника и электроника, том 49, №2, 2004 г., стр. 156-170) - прототип.
Данная система содержит N приемных антенн, первый и второй аналого-цифровой преобразователь (АЦП), вычислитель.
Цель изобретения - формирование цифровой траектории отсчетов координат в виде интерактивного отображения траектории движения ПНО.
Результат достигается централизованной обработкой сигналов, полученных в результате приема электромагнитных колебаний в точках, размещение которых в пространстве определяется оптимальной группировкой слабонаправленных антенных элементов внутри структурных блоков, реализованных отдельными техническими средствами распределенного комплекса.
Поставленная цель достигается тем, что в систему, содержащую N приемных антенн, первый и второй аналого-цифровой преобразователь (АЦП), вычислитель дополнительно введены линейки сенсоров, коммутатор, входы которого соединены с выходами линеек сенсоров, а выход по радиолинии соединен с N приемными антеннами; малошумящий усилитель (МШУ), N входов которого соединены с N приемными антеннами, первый и второй многоканальные синхронные квадратурные приемники (МСКП), входы которых соединены соответственно с первым и вторым выходами малошумящего усилителя, а выходы - с первыми входами первого и второго аналого-цифровых преобразователей, первый и второй каналы обработки информации, первые входы которых соединены с выходами аналого-цифровых преобразователей, а выходы подключены к вычислителю; управляющий контроллер, подключенный по входу к вычислителю, первый выход которого подключен ко второму входу первого многоканального синхронного квадратурного приемника, ко второму входу первого аналого-цифрового преобразователя и ко второму входу первого канала обработки информации, а второй выход - ко второму входу второго многоканального синхронного квадратурного приемника, ко второму входу второго аналого-цифрового преобразователя и ко второму входу второго канала обработки информации; диаграммообразующее устройство (ДОУ), N входов которого соединены с N приемными антеннами; блок радиомодемов, первый вход которого соединен с выходом диаграммообразующего устройства; волоконно-оптическая линия связи, входы которой соединены с выходами блока радиомодемов; устройство формирования выходного сигнала, входы которого соединены с выходами волоконно-оптической линии связи; передающая фазированная антенная решетка, входы которой соединены с выходами устройства формирования выходного сигнала; локальная система передачи данных, подключенная к выходу вычислителя, ко второму входу диаграммообразующего устройства, ко второму и третьему входам блока радиомодемов; специальное программное обеспечение диспетчера связи, соединенное линией связи с локальной сетью передачи данных; командный пункт, соединенный линией связи со специальным программным обеспечением диспетчера связи.
Сравнение с прототипом показывает, что заявляемая система отличается наличием новых блоков и их связями между ними. Таким образом, заявляемая система соответствует критерию «новизна».
Сравнение заявляемого решения с другими техническими решениями показывает, что перечисленные элементы, используемые в блоках, являются известными, однако их введение в указанной связи с остальными элементами приводит к расширению функциональных возможностей системы.
Это подтверждает соответствие технического решения критерию «существенные отличия».
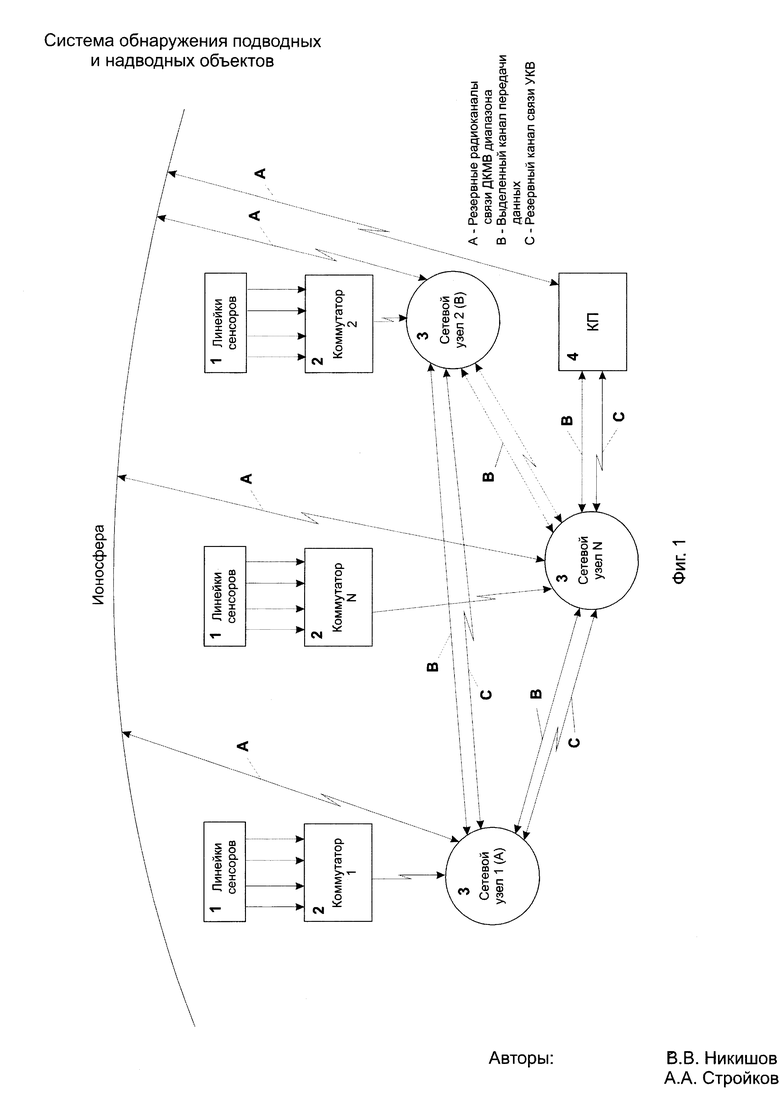
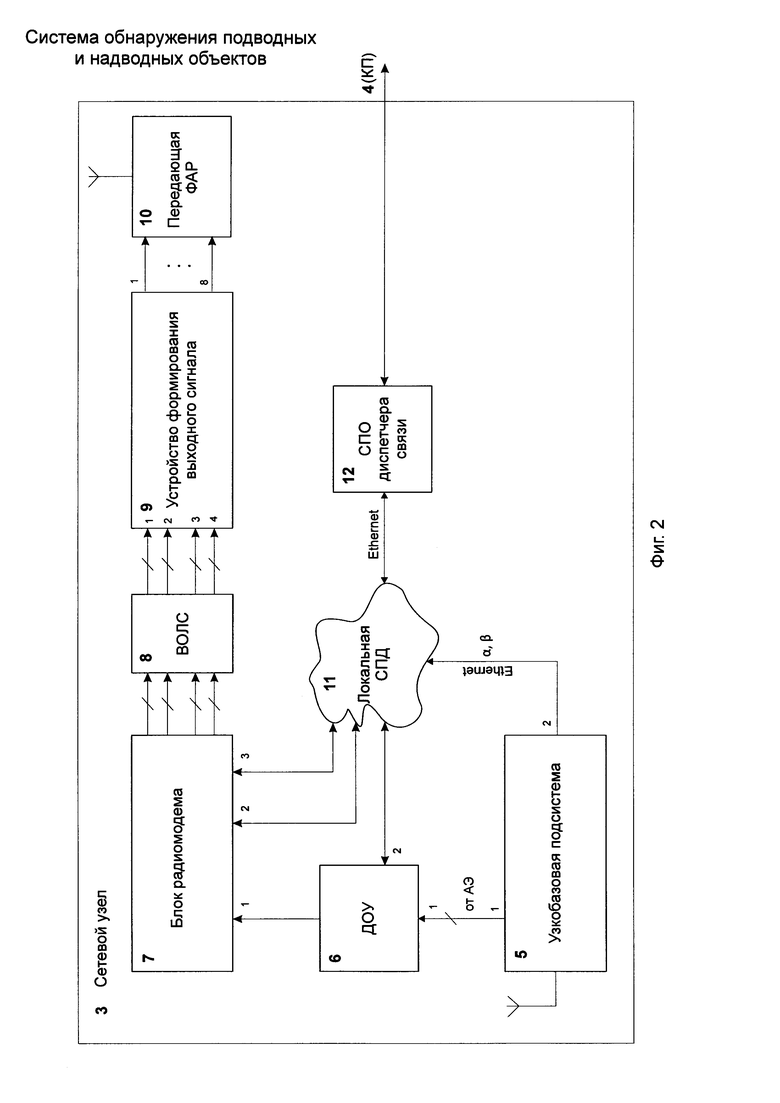
На фиг. 1 представлена общая схема предлагаемой системы обнаружения подводных и надводных объектов (ПНО), на фиг. 2 - структура сетевого узла, на фиг. 3 - структура узкобазовой подсистемы, на фиг. 4 - структура канала обработки информации, на фиг. 5 - принцип определения координат ИРИ пеленгационным методом, на фиг. 6 - пояснения к определению дальности, на фиг. 7 - пояснения к способу определения координат объектов, на фиг. 8 - пояснения к пространственной избирательности линеек датчиков №1 и №2, на фиг. 9 представлен вариант стационарного размещения элементов инфразвукового пассивного радара (ИПР) и сетевых узлов аппаратно-программного комплекса (АПК), на фиг. 10 - вариант мобильного применения АПК, на фиг. 11 показано типовое расположение инфразвуковых пассивных радаров (ИПР), на фиг. 12 представлена структура блока радиомодема, на фиг. 13 - структура устройства формирования выходного сигнала.
Сетевой узел включает (фиг. 2):
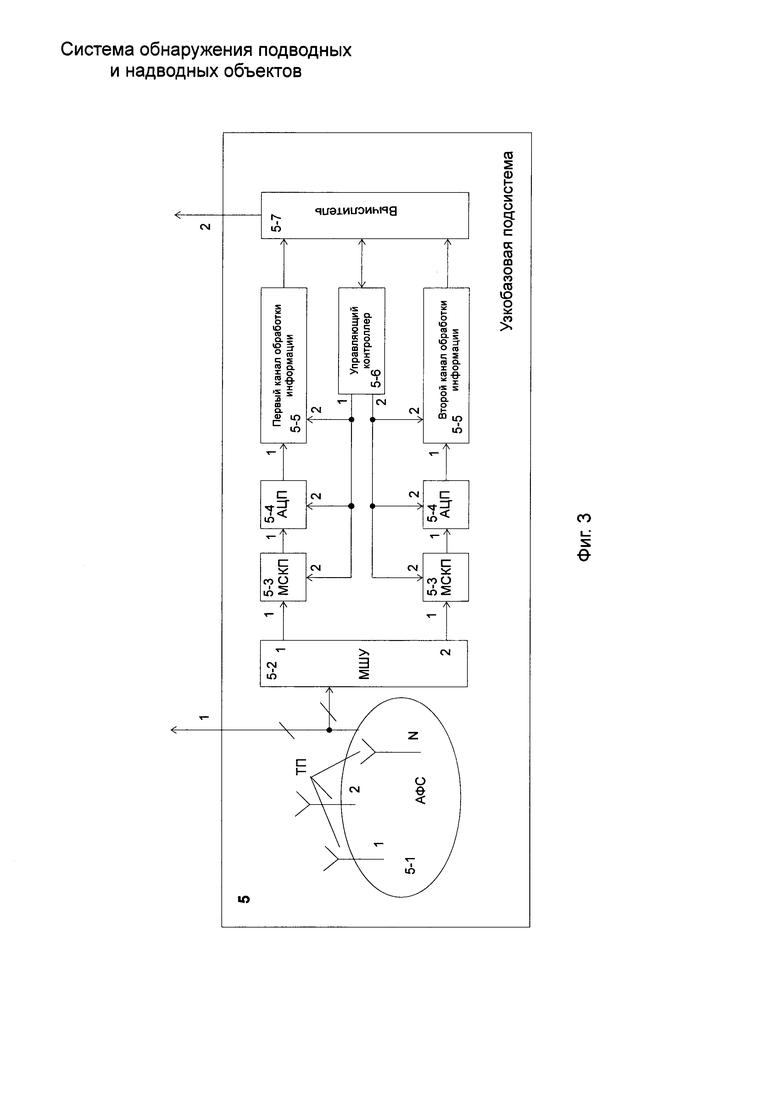
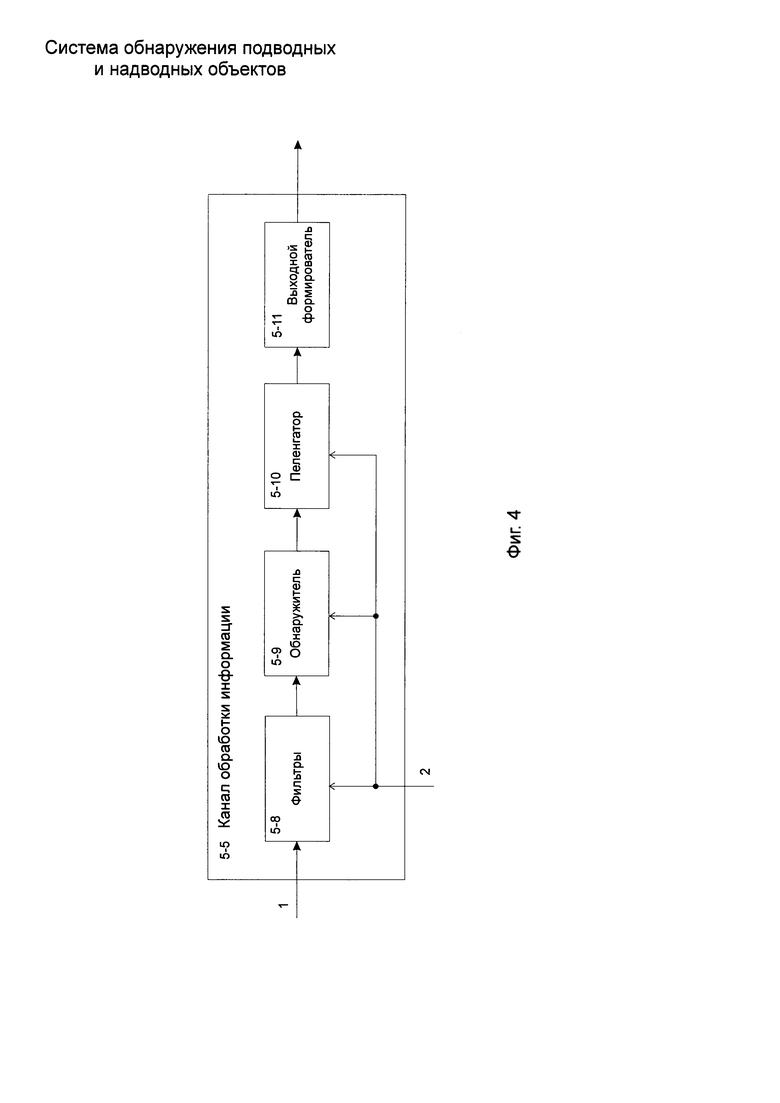
- узкобазовую подсистему (УП) 5 (фиг. 3), в составе: антенно-фидерная система (АФС) 5-1, малошумящий усилитель (МШУ) 5-2, многоканальный синхронный квадратурный приемник (МСКП) 5-3; аналого-цифровой преобразователь (АЦП) 5-4; управляющий контролер 5-6, вычислитель 5-7, канал обработки информации 5-5, включающий (фиг. 4) фильтры 5-8, обнаружитель 5-9, пеленгатор 5-10, выходной формирователь 5-11;
- диаграммообразующее устройство (ДОУ) 6;
- блок радиомодемов 7;
- устройство формирования выходного сигнала (УФВС) 9;
- передающую фазированную антенную решетку (ФАР) 10;
- специальное программное обеспечение (СПО) диспетчера связи 12;
- локальную систему передачи данных (СПД) 11;
- волоконно-оптическую линию связи (ВОЛС) 8.
Система работает следующим образом.
Для обеспечения эффективного обнаружения и пеленгования ПНО в современных условиях важная роль отводится радиотехническим средствам декаметрового диапазона радиоволн (ДКМВ), которые могут работать в сложной помеховой обстановке и условиях распространения радиоволн на большие расстояния.
Получены практические решения в построении низкоэнергетической радиолинии передачи данных, которая способна противостоять узкополосным помехам и частотно-избирательным затуханиям, вызванным многолучевым характером распространения, временным рассеяниям и устранять межсимвольную интерференцию и, кроме того, обеспечивать радиосвязь с динамическими источниками сигнала при наличии у них высокой относительной радиальной скорости.
Определение координат излучающих объектов.
Угломерный (пеленгационный) метод определения координат излучающих объектов основан на определении местоположения ИРИ, как точки пересечения двух и более линий положения, соответствующих измеренным в разнесенных точках приема пеленгам (азимутальным углам).
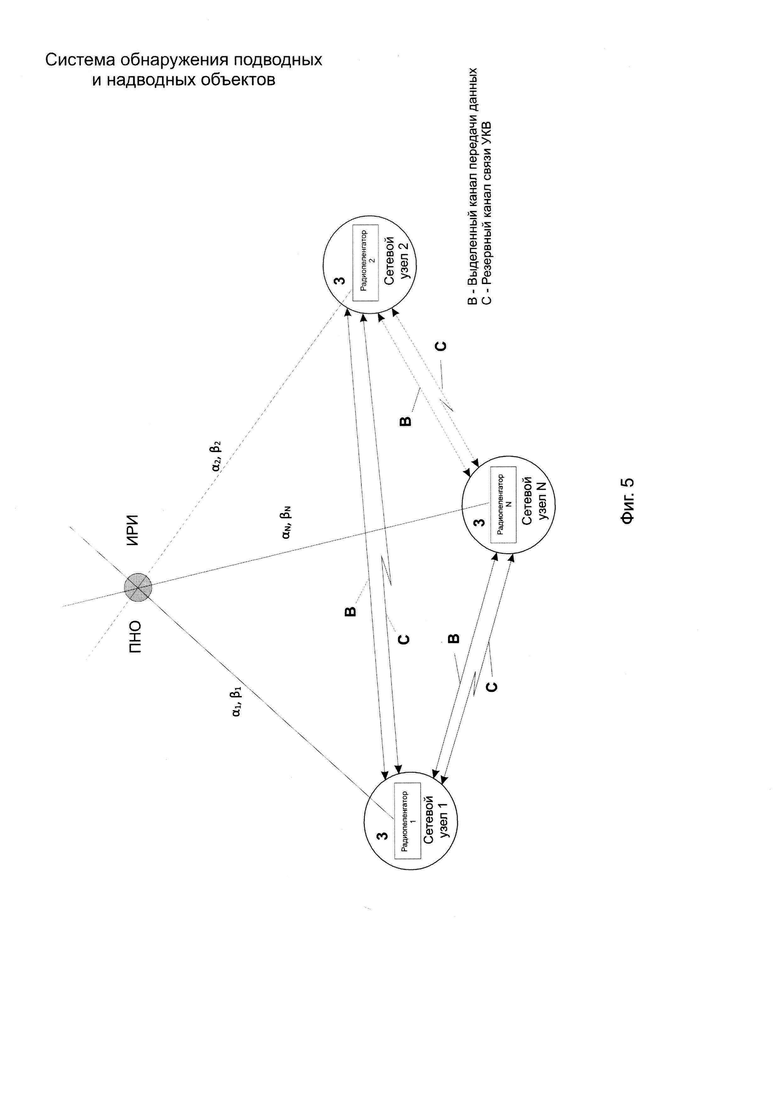
Измерения могут производиться одновременно несколькими (двумя и более) пеленгаторами. Для обеспечения нормального функционирования пространственно-разнесенных пеленгаторов их связь обеспечивается средствами связи радиолинии. Необходимые пояснения к данному методу пеленгования приведены на фиг.5.
На фиг. 5 обозначены:
- ИРИ - пеленгуемый источник ДКМВ радиоволн;
- радиолиния С - межпостовые радиолинии;
- Сетевой узел 1,2…N - узлы 1, 2 и N одноранговой сети;
α1, β1, α2, β2, αN, βN - азимуты (пеленги) и углы места ИРИ, измеренные радиопеленгаторами сетевых узлов 1, 2…N соответственно.
Для определения координат ИРИ необходимо иметь, кроме пеленгов и углов места ИРИ, расстояние (наклонную дальность) от соответствующего
- радиолиния С - межпостовые радиолинии;
- Сетевой узел 1,2…N - узлы 1, 2 и N одноранговой сети;
α1, β1, α2, β2, αN, βN - азимуты (пеленги) и углы места ИРИ, измеренные радиопеленгаторами сетевых узлов 1, 2…N соответственно.
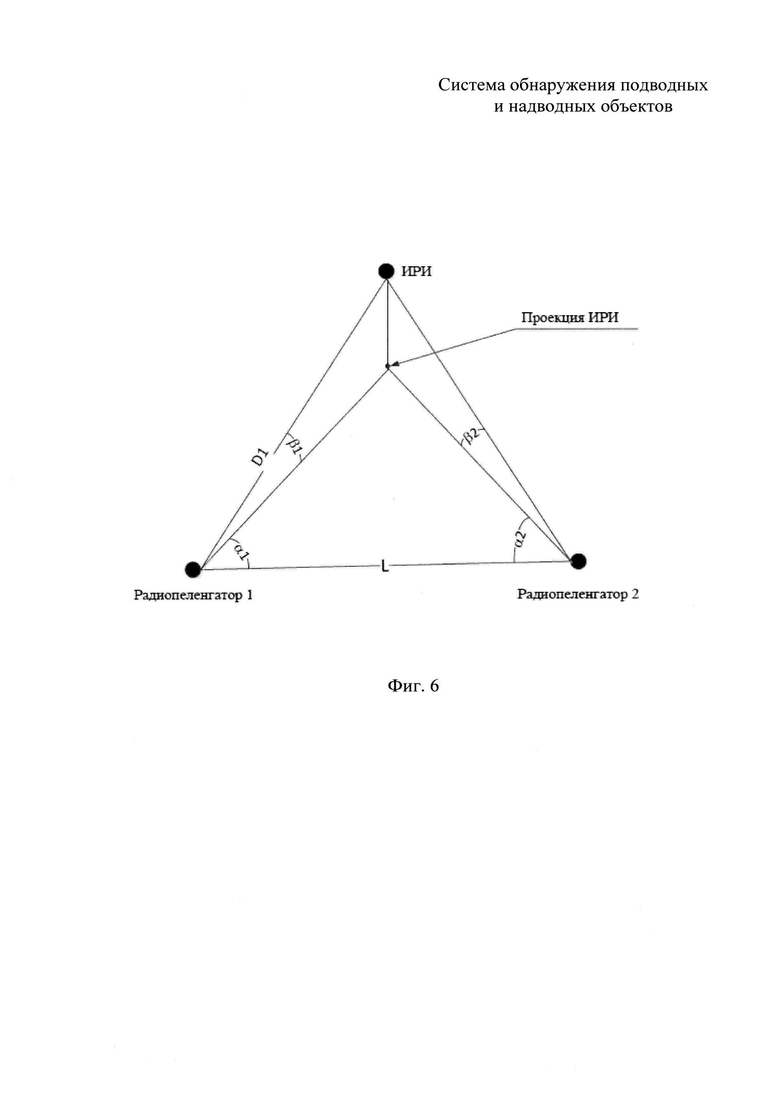
Для определения координат ИРИ необходимо иметь, кроме пеленгов и углов места ИРИ, расстояние (наклонную дальность) от соответствующего узла (радиопеленгатора) до ИРИ. Эту дальность можно определить методом решения прямоугольника по формуле (фиг. 6):
где D1 - расстояние от радиопеленгатора 1 до ИРИ;
L - расстояние между первым и вторым узлами.
Для определения координат объектов, обнаруживаемых линейками сенсоров 1 (фиг. 1), рассмотрим следующую ситуацию.
Надводный объект находится в зоне действия дискретных датчиков (сенсоров) 1. По демаскирующим признакам объекта (в инфразвуковом диапазоне) этот факт фиксируют сенсоры 1 и информация по каналу связи передается на i-й сетевой узел (i=1, 2, …, N). Данная ситуация приводится на фиг. 7, на которой указаны:
- Сетевой узел А с координатами А(х, y);
- Сетевой узел Б с координатами Б(х, y);
- Линейки сенсоров 1 (линейка №1 и линейка №2) стационарного размещения с соответствующей аппаратурой регистрации (Ара и Арб);
- Дискретно расположенные датчики с координатами:
A1(x1, y1), А2(х2, y2), А3(х3, y3), А4(х4, y4);
В1(x1, y1), В2(x2, y2), В3(x3, y3), В4(x4, y4);
- Ара и Арб - аппаратура регистрации 1, обеспечивающая соответствующие сетевые узлы А и Б гидроакустической информацией;
- α1 и α2 - углы установки линеек дискретных датчиков 1.
ПНО находится в зоне контроля 1, что фиксируется аппаратурой Ара и Арб по информации сенсоров 1, имеющих координаты А4(x4, y4) и В3(х3, y3).
Допускается, что при одновременной фиксации наличия ПНО несколькими датчиками одной линейки датчиком-обнаружителем является тот, от которого получен информационный сигнал наибольшего уровня. То есть, здесь принимается, что линейки сенсоров обладают пространственной избирательностью, вследствие чего уровень информационных сигналов, получаемых датчиками А4(х4, y4) и В3(х3, y3), наибольший по сравнению с сигналами других датчиков линеек №1 и №2. Необходимые пояснения по пространственной избирательности линеек датчиков приведены на фиг. 8.
Из фиг. 8 видно, что в линейке №1 дискретно расположенных датчиков наибольший уровень сигнала от объекта ПНО получит датчик, находящийся на расстоянии D1 (км) от места стоянки аппаратуры регистрации Ара и имеющий координаты А4(х4, y4). Из этого же рисунка видно, что в линейке №2 наибольший уровень сигнала от объекта ПНО получает датчик с координатами В3(х, y).
С учетом изложенного принимается, что ПНО относительно датчиков А4(х4, y4) и В3(х3, y3) находится на соответствующих линиях положения KL и MN, которые являются перпендикулярами к соответствующим линейкам датчиков (все решения разрабатываются в прямоугольной системе координат, в которой точка (0, 0) совмещена с местоположением аппаратуры регистрации Ара).
Из фиг. 7 видно, что координаты ПНО могут быть найдены методом решения системы уравнений, описывающих положение линий KL и MN на плоскости. Уравнения этих прямых линий в общем случае имеет вид:
У=КХ+В,
где К - тангенс угла наклона линии относительно оси абсцисс;
В - ордината точки пересечения линией оси ординат.
Используя фиг. 7, при известных значениях угла α1 и дальности D1 до датчика А4(х4, y4), можно получить следующие соотношения:
для линии KL:
К1=tgβ1; β1=ν=α1-90°; β1=α1-90°;
К1=tg(α1-90°);
D1/В1=cosν=cos(α1-90°); В1=D1/(cos(α1-90°).
Тогда уравнение прямой КL, на которой находится ПНО, запишется в виде:

Аналогично, приняв за известные величины угла α2 и дальности D2 до датчика А3(х3, y3), можно получить уравнение для второй линии положения (MN):
К2=tg(90+β3); β3=90°-γ;  ; β3=α2;
; β3=α2;
К2=tg(α2+90°).
Из фиг. 7 видно, что
B2=S1+S2;
S1=D2⋅sinα2; S2=x3 tgβ2=x3⋅tg(90°-α2), где х3 - координата датчика В3 по оси абсцисс.
Тогда B2=D2⋅sinα2+х3⋅tg(90°-α2).
С учетом всех приведенных выражений уравнение второй линии положения выглядит следующим образом:

Для получения координат ПНО решим систему линейных уравнений (1) и (2), в результате чего получим выражения для определения координат X и У:
У1=У2;
tg(α1-90°)⋅Х+D1/(cos(α1-90°)=tg(90°+α2)⋅X+D2⋅sinα2+x3⋅tg(90°-α2); откуда

Приведенный здесь способ определения координат обнаруживаемых объектов может быть использован для большего количества позиций аппаратуры регистрации и соответствующих им линеек дискретных сенсоров (датчиков). При этом возникающие неоднозначности могут устраняться путем учета дополнительных демаскирующих признаков объектов, проявляющихся, в том числе, и в радиодиапазоне.
Для реализации данного способа определения координат объектов по информации сенсоров 1 требуются следующие основные исходные данные:
- координаты стационарно устанавливаемых сенсоров 1;
- координаты аппаратуры регистрации информации сенсоров 1;
- координаты сетевых узлов 3;
- дополнительная информация для исключения неоднозначностей.
За основные параметры движения объекта в зоне контроля сенсоров 1 принимаются скорость и ускорение перемещения, направление перемещения.
Реализуемые алгоритмы обработки вторичной информации предусматривают регистрацию и накопление «паспортов» («формуляров») объектов. Причем, периодичность обновления данных паспортов, наличие системы единого времени и системы временного масштабирования позволяют с минимальными затратами вычислительных ресурсов создавать библиотеки данных паспортов и выдавать Потребителям всю интересуемую информацию, в том числе текущие параметры движения обнаруживаемых ПНО. Причем, эта информация может выдаваться как за весь условный период наблюдения, так и в указанные Потребителем временные интервалы.
Выдаваемые данные по параметрам движения объектов сопровождаются основной (формулярной) информацией по объекту, к которой можно отнести: тип и вид объекта, уровень опасности (по критерию приближенности к охраняемым объектам, границам акваторий и т.п.), основные пространственные параметры и другая информация, позволяющая ее оперативно анализировать и визуализировать.
Основной исходной информацией, позволяющей определять в реальном масштабе времени параметры движения ПНО, являются их текущие координаты.
В программах вооружения стран мира, имеющих военно-морские силы, значительное место занимают работы по созданию интегрированных систем освещения надводной и подводной обстановки. Такие системы имеют в своем составе как средства первичного обнаружения ПНО по их демаскирующим признакам, так и большое многообразие средств и комплексов обработки добываемой информации об указанных выше объектах с целью определения их координат и идентификации. Также неотъемлемой частью данных систем являются средства передачи как первичной, так и вторичной информации об объектах на пункты ее обработки или на заинтересованные КП с целью принятия решений по обнаруживаемым ПНО.
Исходя из общих положений по функциональному предназначению интегрированных систем освещения подводной и надводной обстановки, аппаратно-программный комплекс (АПК) обработки информации (ОИ) предназначен для приема и обработки гидроакустической и другой информации с целью определения координат динамических ПНО и передачи интересуемой информации на заинтересованные командные пункты.
Одноранговая сеть на радиомодемах ДКМВ связи представляет собой сеть служебной радиосвязи, создаваемой по топологии «равный-к-равному» или «все-со-всеми» (Р2Р-сеть). Данная топология обеспечивает максимальную надежность функционирования одноранговой сети, а значит и АПК ОИ инфразвуковых пассивных радаров (ИПР), где разделение вычислительных ресурсов и серверов производится напрямую посредством прямого взаимодействия между участниками сети друг с другом, без участия центрального сервера. В отличие от традиционной клиент-серверной архитектуры в Р2Р - сети каждый узел, входящий в вычислительную сеть, может являться как клиентом, так и сервером, предоставляя или используя ресурсы сети.
Связи и направления обмена информацией в такой сети, рассматриваемой как одноранговой сети АПК ОИ, показаны на фиг. 1, 5 (здесь и далее принимается, что в минимальный состав АПК ОИ входят три узла с необходимым набором радиотехнических средств).
Минимальная модель обмена информацией в такой сети (фиг. 5) определяет следующие правила взаимодействия узлов Сети.
Каждый узел АПК ОИ передает всем остальным узлам информацию об обнаруженном ПНО (ИРИ). При этом, при получении каждым узлом информации с других узлов об этих же ПНО, решается задача определения местоположения каждого ПНО, обнаруживаемого как любым узлом, так и его «соседями», то есть для определения местоположения ПНО используется информация, получаемая на каждом из узлов сети.
В более сложной модели сети каждый рассчитанный пеленг ПНО отправляется обратно приславшему информацию (запрос) узлу.
В общем случае система инфразвуковых сенсоров (датчиков) может применяться как в стационарном; так и в мобильном вариантах. Принцип работы данных сенсоров (датчиков), их конструкция и условия их применения определяются физическими механизмами взаимодействия чувствительных элементов и гидроакустических колебаний, что рассматривается, например, в [4, 5].
В варианте стационарного размещения датчики инфразвуковых пассивных радаров (ИПР) располагаются на необходимых расстояниях от прикрываемых береговых или морских стационарных объектов. При этом датчики ИПР находятся в заглубленном положении. В данных условиях применения ИПР информационные и другие кабели, обеспечивающие функционирование датчиков, имеют длину, исчисляемую десятками километров, вплоть до расположенных в береговой зоне технических средств первичной обработки информации указанных датчиков (сенсоров). Для данного стационарного варианта размещения ИПР (фиг. 9) сетевые узлы АПК ОИ располагаются от средств первичной обработки информации на расстояниях, обеспечивающих надежную ее передачу. Из фиг. 9 видно, что расположение АПК, состоящего не менее чем из трех комплектов однотипного оборудования узлов, определяется местом установки приемников информации ИПР (средств первичной обработки информации ИПР, являющихся специальным оборудованием, не входящим в состав АПК ОИ). При этом расстояния между сетевыми узлами АПК ограничивается только дальностью действия межузловых ДКМВ радиолиний связи.
Мобильный вариант АПК и тактика его применения определяются способом применения ИПР, функционирующих в подвижном варианте (при применении их с патрульных надводных кораблей). Патрульные корабли-носители элементов ИПР и радиотехнических средств АПК ОИ применяются, как частный случай, в общей системе прикрытия авианосных и других ударных соединений, и групп на морских и океанских театрах военных действий (ТВД) при следовании их в заданные районы, от противодействия надводных и подводных сил противника.
В этом случае радиотехническое оборудование (РТО) АПК ОИ устанавливается на кораблях, осуществляющих мониторинг подводной и надводной обстановки с помощью ИПР. АПК ОИ в условиях мобильного применения функционирует так же, как и в случае стационарного размещения. Но при этом непрерывно отслеживается местоположение элементов ИПР и взаимного положения кораблей-носителей ИПР и РТО АПК ОИ. Применение АПК ОИ в мобильном варианте схематично показано на фиг. 10.
Тактика использования ИПР, построенных на основе датчиков-сенсоров, в основном определяется их возможностями по обнаружению сигналов инфразвукового диапазона волн, излучаемых или переотражаемых подводными и надводными объектами.
Так при использовании сверхчувствительных датчиков гидроакустических колебаний, последние могут располагаться на значительных расстояниях до прикрываемых объектов (территорий). Из доступных источников информации известно, что эти расстояния могут достигать десятков километров при использовании сенсоров (датчиков) в пассивном режиме (в режиме, когда данные датчики регистрируют инфразвуковые сигналы подводных и надводных объектов).
С целью повышения возможностей ИПР они могут применяться в системах активно-пассивного обнаружения объектов. В данных системах ИПР обнаруживают ПНО по отраженным от них гидроакустических сигналов, излучаемых инфразвуковыми передатчиками (гидроакустическими станциями, опускаемыми в воду с надводных кораблей или с вертолетов).
В пассивных системах обнаружения, являющихся составными частями систем освещения подводной и надводной обстановки, ИПР целесообразно использовать в стационарном варианте. При стационарном использовании элементы (датчики) ИПР располагаются до 30…40 км от береговой зоны. Количество датчиков (сенсоров) ИПР, сосредоточенных на площади в десятки и сотни квадратных километров, может достигать от нескольких сотен до нескольких тысяч, что определяется дальностью их действия (чувствительностью) и размерами предполагаемых зон мониторинга акваторий.
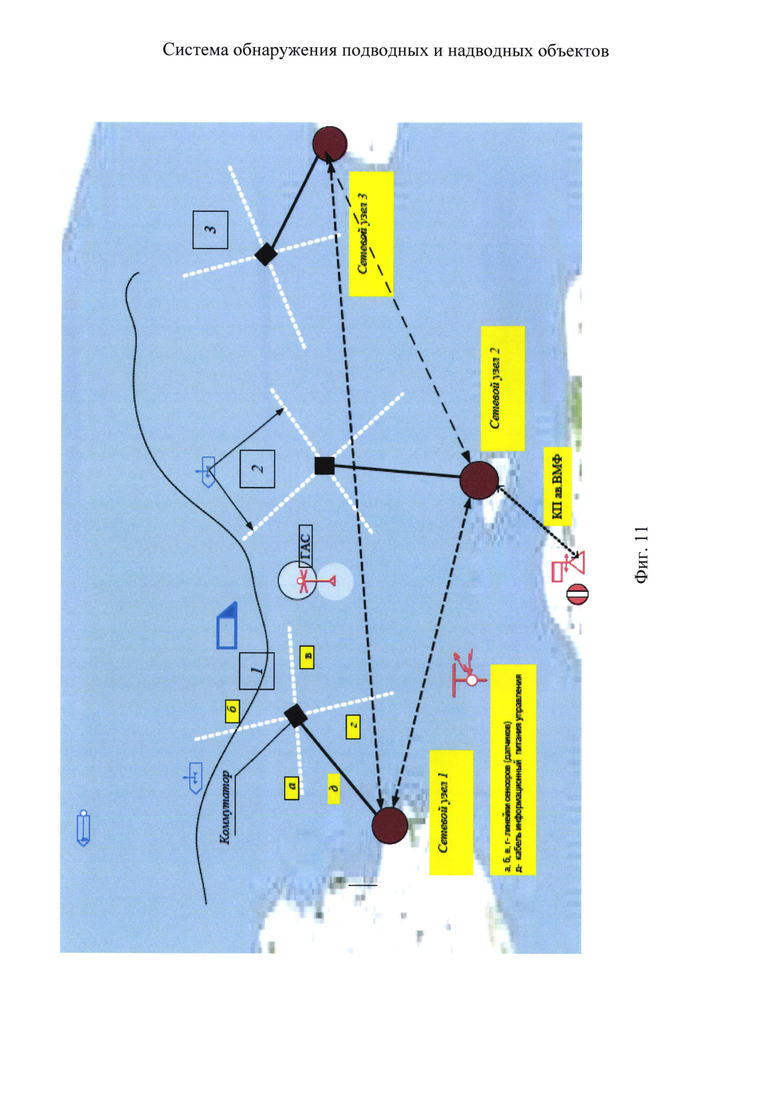
С целью пояснения принципа функционирования и применения ИПР на фиг. 11 приведена тактическая ситуация по обнаружению в прибрежной зоне надводных и подводных судов, осуществляющих несанкционированные действия. Демаскирующими признаками данных объектов являются их излучения в инфразвуковом (ИЗ) диапазоне (гидроакустические колебания) и наличие частот ИЗ диапазона в спектрах излучаемых ими радиосигналов в различных диапазонах волн, в том числе и в ДКМВ диапазоне. Пространственное ориентирование «линеек» датчиков, с учетом чувствительности последних, должно обеспечивать непрерывность в перекрытии зон контролируемых акваторий.
Элементы ИПР, обозначенные на фиг. 11 цифрами 1, 2 и 3, имеют в своем составе «линейки» датчиков а, б, в и г, соединенных с информационным кабелем «д» через коммутатор, обозначенный на данном рисунке в виде закрашенного черным цветом прямоугольника. Длина каждой «линейки» (а, б, в, г) может достигать 10…15 км. Количество датчиков в линейке определяется их чувствительностью. Коммутаторы обеспечивают не только соединение, но и поочередную работу датчиков (сенсоров) каждой «линейки», чем достигается увеличение площади контролируемых акваторий и повышение точности определения координат ПНО при дальнейшей обработке.
Информационный кабель «д» обеспечивает передачу добываемой информации к аппаратуре первичной обработки, входящей состав ИПР, а также питание элементов ИПР и управление. Длина данного кабеля может достигать десятков километров, что определяется общими задачами мониторинга в данном районе.
Аппаратура первичной обработки информации датчиков (сенсоров) ИПР располагается, как правило, в непосредственной близости от морского берега и включает в свой состав аппаратуру усиления, оцифровки и передачи информации по каналам Ethernet на ближайший сетевой узел АПК ОИ.
Из фиг. 11 также видно, что пространственно-распределенный ИПР включает в свой состав три подсистемы датчиков (в виде «линеек»), обозначенных цифрами 1, 2 и 3. Расстояния между этими подсистемами составляет 50…80 км. Каждая подсистема датчиков обеспечивает гидроакустической (или иной, определяемой типами датчиков-сенсоров) информацией ближайший сетевой узел АПК ОИ.
«Линейки» датчиков (сенсоров) всех трех подсистем обнаружения ИПР размещаются стационарно, с заведомо известными координатами. Вариант размещения ИПР является типовым и определяется целым рядом факторов оперативно-тактического и технического характера. При данной схеме применения и размещения ИПР возможно обнаружение, идентификация и определение координат ПНО на основе информации, поступающей как от одной подсистемы ИПР (например, подсистемы обозначенной цифрой 2), так и от всей совокупности датчиков (сенсоров) гидроакустической информации.
Возможности радиопеленгаторов сетевых узлов 3 и входящих в их состав вычислительных средств позволяют дополнять информацию ИПР о местоположении ПНО, используя излучения объектов обнаружения в ДКМВ диапазоне. Причем ПНО, как объекты обнаружения, сопровождения и уничтожения в системах освещения подводной и надводной обстановки, могут обнаруживаться средствами АПК ОИ за пределами зон действия ИПР. При этом обеспечивается необходимая точность определения координат ПНО средствами узлов 3 сети АПК ОИ, что является также одним из достоинств предлагаемой технологии.
Использование ИПР в системах активно-пассивного обнаружения ПНО предполагает, как указывалось выше, применение опускаемых в воду с вертолетов или с других маневренных платформ источников гидроакустических колебаний. Излучаемые гидроакустическими средствами инфразвуковые колебания, достигнув ПНО, отражаются от них в различных направлениях и принимаются датчиками (сенсорами) стационарно размещенных ИПР.
Использование данного способа обнаружения ПНО позволяет не только увеличивать размеры зоны мониторинга, но и оперативно «просматривать» («тестировать») наиболее опасные направления с помощью специальных вертолетов, имеющих на борту гидроакустические средства (на фиг. 11 обозначено «ГАС»).
Координатная и другая интересуемая информация об обнаруживаемых объектах по установленным каналам связи может передаваться с любого из сетевых узлов 3 на КП 4 с целью принятия решений по противодействию ПНО и управления патрульными и ударными самолетами.
Существенным преимуществом предлагаемого решения, в основе которого лежит реализация принципа сетевого взаимодействия «Р2Р» (равный-к-равному), является ее устойчивость к различным внештатным ситуациям, например, недопустимый уровень помех в каналах связи; аппаратурные отказы средств приема/передачи информации; отсутствие информации с отдельных датчиков (сенсоров) при наличии в их зоне контроля объектов наблюдения и др.
Здесь необходимо также отметить, что первичную обработку информации датчиков ИПР, предназначаемой для передачи в АПК ОИ, необходимо проводить специальной аппаратурой ИПР, чем достигается более высокий уровень надежности ее передачи на сетевые узлы 3 и возможность снижения требований к соответствующим линиям передачи.
Преимущества изложенных подходов к реализации предлагаемой технологии достигаются аппаратурно и программно-техническими решениями, реализуемыми в приемо-передающих антенных системах, в радиоприемных устройствах и устройствах обработки цифровых сигналов, в адаптивных высокоскоростных ДКМВ радиомодемах и в устройствах пеленгации объектов.
Сетевой узел 3 (фиг. 2).
Наземный (мобильный) комплекс оборудования состоит из нескольких сетевых узлов 3 (СУ), в состав которых входит аппаратно-программный комплекс обработки информации (АПК ОИ) с адаптивной радиолинией передачи данных декаметрового диапазона радиоволн (ДКМВ). СУ 3 объединены между собой каналами передачи данных по схеме «Р2Р-сеть» (фиг. 1, 5).
СУ 3 стационарного размещения имеет несколько информационных каналов обмена информацией, среди которых могут быть выделенные каналы связи, резервные каналы связи УКВ и резервные каналы связи ДКМВ.
Каналы связи между СУ 3 на расстояниях вне их прямой видимости, возможно организовать только через ДКМВ радиосредства, которые
Значения пеленга и угла места (α, β) привязываются к временной шкале и вместе с полученными измерениями фиксируются в формуляре цели первичной базы данных в составе специального программного обеспечения (СПО) вычислительного оборудования СУ 3.
После формирования в СУ 3 полного кадра контроля формуляра цели он передается из внутренней локальной сети СУ 3 в специальное программное обеспечение вторичной базы данных всех СУ 3 системы.
Вторичная база данных предназначена для хранения информации о формулярах целей со всех СУ 3.
Передача и обмен информацией содержимого вторичных баз между СУ 3 осуществляется по каналам передачи данных ведомственных сетей Ethernet.
В случае отсутствия возможности использования ведомственных каналов связи межсетевой обмен содержимым вторичных баз данных осуществляется по каналам цифровой декаметровой радиолинии (ДКМВ) из состава оборудования средств служебной связи и резервирования каналов передачи данных.
Все СУ 3 имеют одинаковую структуру информации во вторичных базах всей сети развернутых СУ 3, независимо от постовой зоны контроля.
На основании информации из вторичных баз данных алгоритм специального программного обеспечения СУ 3 решает задачу определения координат ПНО.
Координата дальности ПНО может определяться или уточняться расчетным методом по алгоритмам расчета дальности с использованием высоты ионосферного слоя, триангуляционным способом с нескольких СУ 3 и разностно-дальномерным методом с использованием уточняющих поправок первых двух методов.
К информации вторичной базы данных на СУ 3 имеет доступ СПО диспетчера связи 12 (фиг. 2) для визуализации для построения динамических траекторий перемещения ПНО в пространстве. Визуализация динамической информации может осуществляться на мониторе технологического рабочего места оператора или на внешнем специальном информационном демонстраторе.
Полный вектор координат объектов контроля ПНО в согласованном виде или в виде формуляров целей передается с любого поста СУ 3 на оборудование КП 4 (фиг. 1) по каналам обмена Ethernet.
Таким образом, сеть СУ 3 с радиотехническим оборудованием декаметрового диапазона радиоволн, размещенных в составе наземного комплекса освещения обстановки, выполняет автоматический контроль отраженных сигналов ИПР между собой или наземными КП и взаимный автоматический обмен информацией о навигационных параметрах движения ПНО в пространстве зоны действия сети СУ 3.
Алгоритмы функционирования радиотехнических устройств
Исходным состоянием оборудования сети является дежурный режим, при котором оборудование, размещенное на стационарных объектах, находится в выключенном состоянии.
Оборудование фазированной решетки (ФАР) на прием и на передачу, которое вынесено из объектов управления на различное расстояние, находится под телеметрическим управлением и технической охраной специальных средств СУ 3 от несанкционированного доступа и антивандального вмешательства.
Для обеспечения постоянного контроля текущего состояния ФАР оборудование технической охраны включено в работу постоянно и размещается в зоне быстрого реагирования или физической охраны.
Перевод оборудования СУ 3 из исходного состояния (дежурный режим) в рабочее состояние выполняется после подачи питающих напряжений на оборудование.
При этом включение оборудования ФАР на передачу, которое вынесено до нескольких км от места размещения основного оборудования СУ 3, управляется по телеметрическим каналам.
По этим каналам в СПО диспетчера связи 12 (фиг. 2) поступает информация о состоянии температуры модуля усилителя мощности (УМ) и при ее отклонении от заданных величин от технической нормы выполняется включение подогрева или охлаждения устройств съема теплового потока усилителя (радиатора УМ).
После завершения цикла внутреннего самоконтроля оборудования СУ 3 и получения положительного результата выполняется инициализация режимов работы СУ 3 по сохраненным настроечным параметрам предыдущих сеансов работы СУ 3.
При первичном включении оборудования СУ 3 происходит многофазовая полуавтоматическая настройка оборудования и настройка его в режим постоянного автоматического функционирования.
Алгоритм установления связи по служебным каналам предусматривает фазу поиска оптимальных вертикальных углов прихода радиоволны на приемную ФАР с заданного направления.
Для этого один из каналов радиолинии СУ 3 переводится в режим передачи тестового сигнала (ТС) по известной временной диаграмме каждому СУ 3 и выполняется режим вызова корреспондента на связь для проверки параметров канала связи на вызывной частоте, которая задается расчетным методом.
Оборудование цифровой радиолинии в ходе своей работы автоматически измеряет отношение сигнал/шум в настроенных каналах связи и выдает эти значения для СПО диспетчера связи 12, где происходит накапливание измерительной информации и принимается решение и выбор оптимального режима ведения связи.
Для пространственного управления виртуальным центром диаграммы направленности на прием узкополосное пеленгационное устройство 5-10 (фиг. 4) выполняет постоянный мониторинг угловых параметров источника принимаемого сигнала и вырабатывает сигналы рассогласования по азимуту и углу места, которые поступают через локальную СПД 11 в СПО диспетчера связи 12.
СПО диспетчера связи 12 управляет оборудованием диаграммообразования (ДОУ 6) приемной и передающей стороной цифровой радиолинии таким образом, чтобы в реальном времени были применены оптимальные значения угловых величин.
Кроме этого, СПО диспетчера связи 12 выполняет настройку технического оборудования на назначенные частоты связи всех связных устройств поста СУ 3 и выдает на сопровождение в узкополосный пеленгатор 5-10 (фиг. 4) значения частот для контроля, сопровождения и список разрешенных и запасных частот связи с возможной их оперативной заменой в обозначенном диапазоне работы технических средств.
Для обеспечения цифровой связи между СУ 3 в составе средств служебной связи функционирует цифровая радиолиния с радиомодемом, который обеспечивает оптимальный способ доставки цифровой информации абонентам сети СУ 3.
Схема построения цифрового обмена информацией предусматривает возможность постоянного резервирования каналов передачи данных для обеспечения бесперебойной работы сети СУ 3 на основании долгосрочного, оперативного и мониторингового прогноза прохождения радиоволн.
Для этого каждый пост СУ 3 имеет собственный канал радиосвязи по декаметровым радиолиниям с каждым постом из состава сети. Организация каналов каждый с каждым (фиг. 1).
На каждом направлении связи применяется радиомодем из состава средств служебной связи и резервирования каналов передачи данных, который обеспечивает передачу данных в сторону сопряженного поста на отдельной частоте связи на передачу и на прием.
Все радиомодемы и линейное высокочастотное оборудование канала связи управляется от СПО диспетчера связи 12.
В силу принципа построения обмена в сети радиомодемы постоянно слушает направление связи и ожидает вызывного сигнала от вызывающей стороны.
После получения вызывного сигнала радиомодем автоматически формирует цифровой канал связи в заданном направлении для передачи информации диспетчеру связи или назначенному порту приема информации в локальной вычислительной сети передачи данных.
Взаимодействие и передача данных между радиомодемом и локальной сетью осуществляется по протоколу TCP/IP в сети Ethernet.
Кроме каналов передачи цифровых данных на радиомодемах, в состав оборудования введен дополнительный канал передачи данных, который обеспечивает СПО диспетчера связи 12 информацией о состоянии каналов связи и среды передачи радиосигналов на основании работы специального режима радиомодема - измерение частотных характеристик радиоканала.
Этот режим позволяет оценить состояние среды прохождения радиоволн декаметрового диапазона с оценкой амплитудно-частотной, фазочастотной и энергетической характеристик, оценить соотношение сигнал/шум в рабочей полосе частот связи на частотах волнового расписания, выданного для функционирования радиолинии.
Для случая оперативного технического увеличения пропускной способности радиолинии в определенном направлении связи предназначен дополнительный резервный канал цифровой радиолинии связи в УКВ диапазоне (фиг. 1), который может использоваться и для ведения связи по дополнительному радионаправлению с подобным оборудованием и структурой сигнально-кодовой конструкции служебной цифровой радиолинии.
Информационные цифровые потоки вторичной базы данных преобразовываются в выходные потоки данных для визуализации процессов работы оборудования СУ 3.
Модуль управления сетью СУ 3 позволяет формировать цифровую траекторию отсчетов координат в виде интерактивного отображения траектории движения ПНО.
При построении радиолинии обмена данными между СУ 3 возможно присутствие мешающих сигналов на приемную ФАР в составе узкобазовой подсистемы 5 от передающей ФАР 10 (фиг. 2), что будет снижать минимальный уровень принимаемого радиосигнала в точке приема и существенно влиять на электромагнитную обстановку в районе установки передающей ФАР.
Для исключения взаимного влияния радиосредств целесообразно обеспечить разнесение приемной и передающей ФАР на оптимальное расстояние.
Величина этого расстояния существенно влияет на длину радио кабеля от места установки синтезатора рабочего сигнала и усилителя мощности под антенным элементом передающей ФАР 10.
Предлагается решение для выполнения фиксированного выноса оборудования по оптическим каналам передачи цифровой информации на большие удаления, что позволит иметь свободу выбора решений и возможность использования уже имеющейся инфраструктуры оптических линий связи.
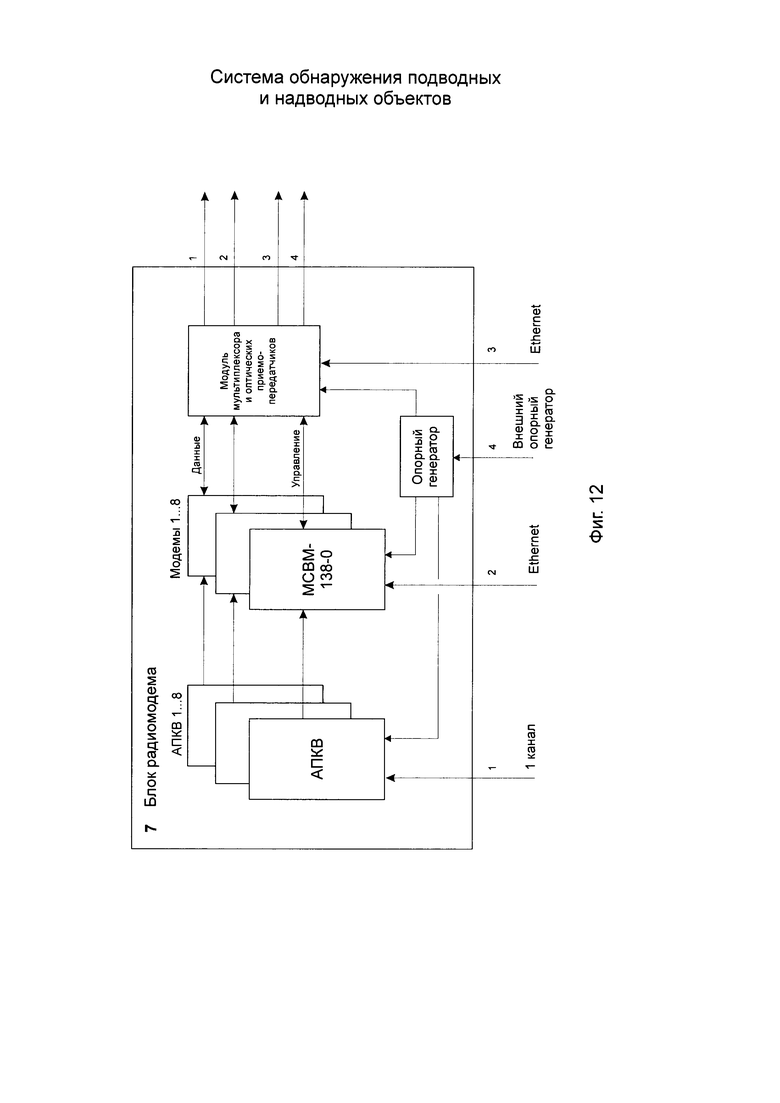
Суть решения состоит в переносе спектра рабочих сигналов на нулевой частоте блока радиомодемов 7 (фиг. 2) в цифровой вид для транспортировки по оптическому каналу на большие расстояния с последующим дополнением и упаковки структуры информацией о рабочем сигнале, амплитудой и фазой парциального канала формирования и суммирования мощности излучения в заданном направлении пространства, а также передачи управляющих сигналов на соответствующие формирователи несущей частоты с телеметрическим контролем состояния усилителя мощности. Групповое формирование сигнала на передачу выполняется в цифровом виде 8-ю синтезаторами несущей частоты связи с последующим переносом группового спектра в аналоговый вид для усиления по мощности. У каждого усилителя мощности свой синтезатор.
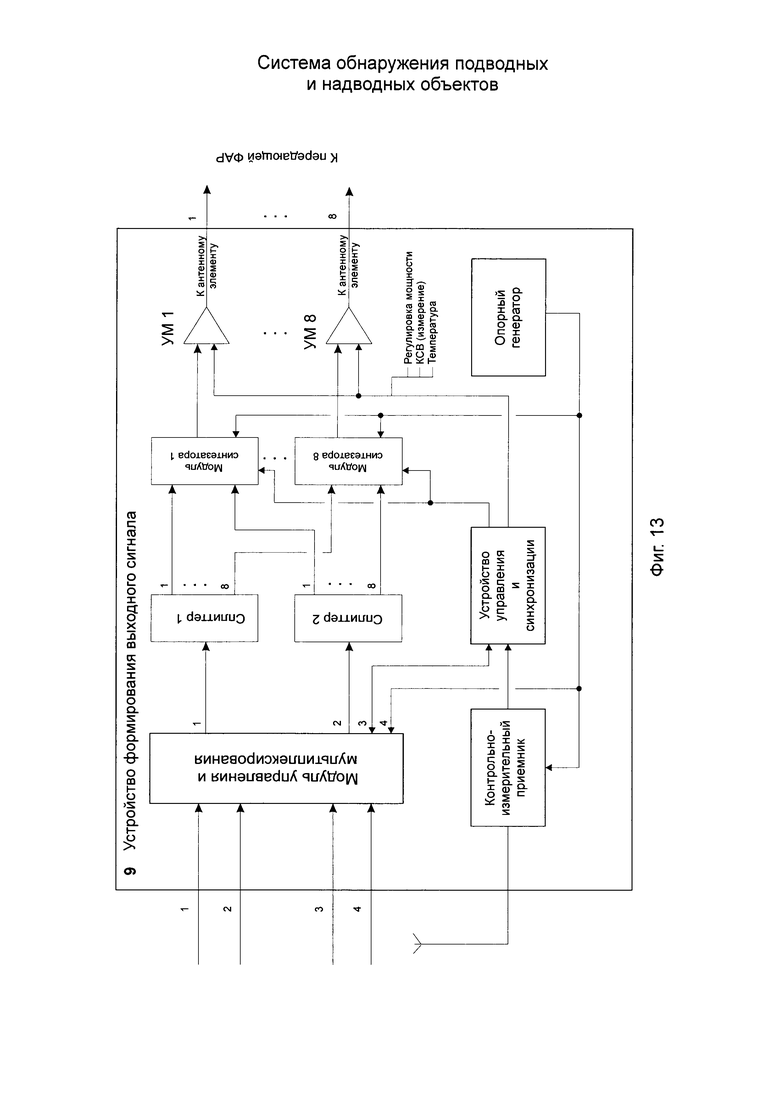
Для исключения температурной и токовой зависимости переходной характеристики активных элементов усилителей мощности (УМ 1-8) и соединительного радио кабеля в структуру формирователя введен модуль измерения фазы несущего колебания каждой антенны для учета ее значения в законе формирования максимума диаграммы направленности передающей ФАР 10.
Блок радиомодема 7 (фиг. 12) имеет на своем входе рабочий сигнал модулятора модема в виде цифровых отсчетов на нулевой частоте.
Передающий тракт радиолинии представляет собой цифровое устройство, выполненное в цифровом виде с цифровой обработкой сигналов, последующей фильтрацией, преобразованием в аналоговый вид и усилением по мощности в оконечном усилителе мощности, нагруженного на комплексное сопротивление антенного излучателя.
В состав устройства формирования выходного сигнала 9 (фиг. 13) входит контрольно-измерительный приемник (КИП) для оценки значения фазы в установленном канале передачи.
Процесс измерения имеет высокую степень точности за счет применения высокоточного опорного генератора в цепи формирования опорного сигнала и момента запуска измерителя фазы.
Момент начала процесса синтеза выходного сигнала в модуле синтезатора и начало измерений в КИП синхронизирован специальной командой от диспетчера связи и разнесен во времени работы каждого канала передачи.
Значения фазы передаются в СПО диспетчера связи 12 (фиг. 2), где учитываются при вычислениях заданного направления в качестве поправок от эксплуатационных значений измеренных задержек.
Адаптивная радиолиния передачи данных декаметрового диапазона радиоволн (АРЛПД КB) предназначена для передачи информации, используя принцип пространственно-временного способа формирования направления связи с автоматическим выбором оптимального направления на источник сигнала, который представляет собой сложную сигнально-кодовую конструкцию.
Принцип работы
Управляющая программа СПО диспетчера связи 12 инициализирует входящее в состав АРЛПД оборудование в заданное исходное состояние.
Пеленгационное устройство радиосигналов (ПУР) 5-10 (фиг. 4) настраивается в режим обзора заданного частотного диапазона для поиска и обнаружения отраженного от ПНО сигнала и вычисления направления прихода радиоволны по азимуту и углу места. ПУР работает на основе одноэтапного алгоритма пеленгования источника радиосигнала излучения (ИРИ), который позволяет вычислить угловые параметры ИРИ. Для обеспечения функционирования алгоритма пеленгования ПУР соединен с приемной ФАР (I-1) (фиг. 3) заданной конфигурации.
К приемной ФАР 5-1 в составе узкобазовой подсистемы 5 (выход 1) подключено диаграммообразующее устройство (ДОУ) 6 (вход 1) (фиг. 2), которое обеспечивает амплитудно-фазовое сложение сигналов на выходе с заданного пространственного направления. Выходной сигнал приемной ФАР подается на блок радиомодемов 7 для выполнения частотной селекции спектра рабочего сигнала, его усиления и обеспечения работы канала демодулятора блока радиомодема.
Закон формирования сложения в ДОУ 6 задается от СПО диспетчера связи 12 через локальную сеть передачи данных (СПД) при обнаружении пеленгов ИРИ в ПУР 5-10. Значение текущего пеленга на ИРИ передается на ДОУ II через СПД в реальном масштабе времени.
Блок радиомодемов (БРМ) 7 (фиг. 12) обеспечивает преобразование входной информации от СПО диспетчера связи 12 в рабочий сигнал сложного вида для передачи его по каналу связи в модуляторе радиомодема и демодуляцию сложного сигнала в информационный поток, который поступает в СПД 11.
БРМ 7 формирует сигнал в сторону устройства формирования выходного сигнала (УФВС) 9 (фиг. 2).
Узкобазовая подсистема (УП) 5 (фиг. 3)
Источник радиоизлучения (ИРИ), находящийся на ПНО, порождает электромагнитный сигнал, для описания которого используется модель гауссовского радиосигнала:

где K - число учитываемых составляющих,
f0 - несущая частота,
fk - частоты учитываемых составляющих в спектре комплексной огибающей,
аk и bk - коэффициенты, являющиеся гауссовскими взаимно-независимыми случайными величинами.
Такой сигнал соответствует случаю стохастической модели, применение которой обеспечивает работу системы в условиях наименьшей доступной априорной информации.
Узкобазовая подсистема 5 представляет собой технически единую приемную станцию, реализующую многоканальный прием в отдельных точках приема (ТП), размещение которых в структуре антенной системы УПi I удовлетворяет двум условиям:
1. Расстояние между ТП одной и той же УПi намного меньше расстояния между УПi и ИPИj. Данное условие обеспечивает плоский фронт волны.
2. Расстояние между ТП одной и той же УПi не превышает половины длины волны λ0=c/f0, соответствующей несущей, или центральной частоте принимаемого радиосигнала f0, а под с понимается скорость распространения сигнала от ИPИj до УПi, равная скорости света.
УПi I состоит из антенно-фидерной системы (АФС) 5-1, блока малошумящих усилителей (МШУ) 5-2, многоканального синхронного квадратурного приемника (МСКП) 5-3, блока аналого-цифровых преобразователей (АЦП) 5-4, первого и второго каналов обработки информации 5-5, управляющего контроллера 5-6 и вычислителя 5-7, соединенного линией связи (выход 2) с локальной СПД 11 (фиг. 2). Блок МШУ 5-2 осуществляет предварительное усиление сигналов до его передачи на входы МСКП 5-3. Блоки МСКП, АЦП являются программно-управляемыми, режим работы которых задается управляющими сигналами вычислителя 5-7.
При приеме электромагнитные колебания превращаются в аналоговый электрический радиосигнал, который поступает на вход МШУ 5-2, с выхода которого радиосигнал поступает на входы МСКП 5-3. В результате синхронного детектирования на выходах МСКП формируется аналоговый видеосигнал, поступающий в форме пар квадратур на входы АЦП 5-4, на выходе которых формируется цифровой сигнал в форме отсчетов.
Отличительными характеристиками МСКП являются центральная частота, перестраиваемая в широких пределах: от 20 МГц до 3 ГГц, и широкая полоса частот демодулируемого сигнала, составляющая величину до 60 МГц, что определяет сигнал как широкополосный в верхней части диапазона центральной частоты, и как сверхширокополосный в его нижней части. Для достижения требуемого качества приема независимое цифровое управление усилением каждого канала осуществляется с шагом 0,5 дБ, а синхронизация каждой пары каналов квадратурного приемника должна обеспечивать фазовое различие точности квадратур не более 2 градусов по абсолютной величине. Для получения технического результата применяется многоканальный 16-разрядный многоканальный АЦП с перестраиваемой частотой дискретизации, при этом максимальная частота составляет 100 МГц, что с учетом защитных интервалов согласуется с максимальной полосой принимаемого радиосигнала.
Синхронность взятия отсчетов в различных каналах АЦП должна обеспечивать рассогласование моментов времени не более 0,05 от используемого периода дискретизации.
Вычислитель 5-7 реализуется на основе высокопроизводительной многопроцессорной рабочей станции, оснащенной не менее чем двумя многоядерным универсальным процессорами класса Intel Xeon с рабочей частотой не менее 1,8 ГГц, и оперативным запоминающих устройством (ОЗУ), объемом не менее 8 ГБ. Вычислитель 5-7 в структуре осуществляет функции управления работой УПi (5) за счет задания функциональных режимов отдельных блоков. Кроме этого вычислитель 5-7 выполняет предварительную цифровую обработку принятых сигналов, а также их компрессию перед передачей по линии связи.
Антенная система УПi (5) размещается на вертикальной мачте, высота которой составляет от 1,5 до 18 м. В верхней части мачты, на протяжении участка длины L, размещаются от одной до девяти кольцевых антенных подрешеток (КАПР). Минимальное расстояние между планарными КАПР составляет 0,5 м, что обуславливается технологическими особенностями крепления, а максимальное ограничено протяженностью рабочего участка мачты L.
Структурная организация распределенной приемной системы пассивного радиолокационного комплекса позволяет сформировать на приеме необходимое пространственное распределение электромагнитного поля сигнала, излученного ИРИj.
Пусть ИPИj расположен в точке пространства, координаты которой заданы вектором r=(X, Y, Z)T. Тогда сигнал, принятый m-ой ТП, состоящей в структуре i-ой УП представляет собой сумму задержанного и взвешенного полезного сигнала, и аддитивного шума:

где аn - амплитуда сигнала на входах ТП i-й УП;
τnm=τn+χn+ζnm; τn=|rn-r|/с - время прохождения сигнала от ИРИj до условного фазового центра (УФЦ) i-й УП;
rn=⎢⎢Xn, Yn, Zn⎢⎢T - координаты УФЦ i-й УП;
χn - ошибка привязки сигнала по времени;
ζnm=(rnm-rn)Tcα/c - время прохождения сигнала от УФЦ до ТП (от ТП до УФЦ, если ζnm<0);
rnm=⎢⎢Xim, Yim, Zim⎢⎢T - координаты m-й ТП i-й УП;
cα=⎢⎢cos(αn)cos(βn); sin(αn)cos(βn); sin(βn)⎢⎢T;
αn, βn - азимут и угол места луча, направленного из i-й УП на ИРИj;
с - скорость распространения сигнала.
Отличительное условие, обеспечивающее эффективное использование данной модели, состоит в том, что время наблюдения сигнала на каждой позиции должно быть выбрано много больше времен корреляции сигнала и помехи. Цифровые отсчеты всех принятых сигналов передаются по высокоскоростным линиям связи в локальную СПД 11. Цифровые сигналы, принятые отдельными ТП, рассматриваются совместно и формируют многомерный цифровой сигнал.
Оценка координат производится с использованием комбинированного угломерного и разностно-дальномерного способа оценивания, при котором вся распределенная система рассматривается как комбинированная пассивная система (КПС), сочетающую в себе общие черты широкобазовой пассивной системы (ШбПС) и пассивной системы, состоящей из узкобазовых подсистем (ПСУП). В основе метода оценивания такой системы лежит способ вычисления оценки разности прихода сигналов на основе корреляционного приема по методу максимального правдоподобия, который для двух точек приема представлен в зарубежной работе [6].
Угловые координаты ПНО по азимуту и углу места определяются фазоразностным пеленгатором.
Функционально устройство состоит из пеленгатора 5-10 с цифровой антенной решеткой 5-1, обнаружителя 5-9 частотно-временных признаков целей (классификатора целей), выходных формирователей 5-11 матриц координат целей и вычислителей 5-6, 5-7, в которых функционируют алгоритмы экстраполяции траекторий ПНО, управляющие алгоритмы устройства и сетевые алгоритмы обмена данными и управления с радиотехнического комплекса.
Пеленгатор 5-10 с цифровой антенной решеткой 5-1 состоит из фиксированной антенной решетки, размещенной на пространственно разнесенной точке приема.
Каждая из антенн подключена к входу МШУ 5-2, который обеспечивает согласование импедансов антенного элемента и соединительного кабеля. Каждый выход МШУ 5-2 подключен к своему приемному тракту, который образован одним из каналов многоканального синхронного квадратурного приемника (МСКП) 5-3 и аналого-цифровым преобразователем (АЦП) 5-4. Таким образом, сформирован индивидуальный цифровой канал отсчетов сигнала с одного элемента решетки.
АЦП 5-4 сигнала одновременно выполняет выборку сигнала по множеству каналов. Размер этого множества определяется числом элементов антенной решетки 5-1. Так, для решетки из 16 элементов потенциальная точность устройства составляет около 12 угловых минут. При увеличении числа элементов точность возрастает.
Когерентная обработка сигнала выполняется в фильтрах 5-8, обнаружителе 5-9 и пеленгаторе 5-10 канала обработки информации 5-5.
В силу необходимости обеспечения стабильности амплитудно-частотных характеристик (АЧХ) тракта пеленгации, в нем предусмотрены меры по измерению АЧХ перед снятием отсчетов сигнала в полосе рабочих частот. Периодичность контроля АЧХ связана со стабильностью электрических параметров канала и управляется по алгоритму контроля реперных (известных источников сигнала) в процессе работы от контроллера 5-6.
Пеленгатор 5-10 обеспечивает определение угловых координат ПНО (источников радиоизлучения - ИРИ) по фазовому портрету пришедшего сигнала. Пеленгатором определяются углы прихода сигналов на антенную решетку с разных направлений на одной частоте и полосе частот. Число направлений задается требуемой точностью определения угловых координат. Для точности в 6 минут мгновенная матрица углов имеет размерность 3600 элементов. Время получения пеленга (квант времени решения задачи) зависит от быстродействия вычислителя 5-7.
Обработка информации осуществляется в вычислителе 5-7.
Предварительно заполняется матрица (азимут-угол места) по частотному диапазону является неполной, без координаты дальности, эта координата в последствии получается расчетным способом из тригонометрических уравнений траектории движения ПНО (фиг. 6), и она дополняет базу координат ИРИ до логического уровня.
Динамика работы
Многоканальный синхронный квадратурный приемник (МСКП) 5-3 работает в режиме пеленгации ПНО на одной частоте с одной из имеющихся полос наблюдения за сигналами.
Сигналы с выхода вычислителя 5-7 в цифровом виде поступают на обработку и выдаются через локальную СПД 11 в СПО диспетчера связи 12 (фиг. 2).
С определенным темпом перестройки МСКП 5-3 по диапазону осуществляется наблюдение (локация) ИРИ и автоматическое определение их координат, с привязкой к моменту времени обнаружения.
Привязка по времени выполняется для разностно-дальномерного способа уточнения координат и решения специальных алгоритмов синтеза пространственно-временного разноса.
Таким образом, рассматриваемая система пассивного обнаружения источников радиоизлучения повышает точность определения координат ПНО.
Приемная ФАР 5-1.
Фазированная антенная решетка состоит из нескольких взаимно-когерентных антенных элементов с антенными усилителями для размещения на мачте.
Каждая мачта устанавливается на местности случайным образом на заданном расстоянии между собой.
Один антенный элемент (АЭ) имеем два идентичных горизонтальных вибратора, которые взаимно перпендикулярны друг к другу и ориентированы в решетке по географическому меридиану и широте.
Антенные элементы имеют укороченный вид и собственный усилитель сигналов (УС) с высоким динамическим диапазоном по напряжению. УС выполняет согласование АЭ с волновым сопротивлением питающего радио кабеля и через него подается питания от вынесенного источника напряжения.
Выход УС подключается к устройству деления сигнала (сплитер), к которому подключаются сопряженные потребители - пеленгатор радиосигналов и диаграммобразующие устройства.
Пеленгатор радиосигналов (ПР)
Пеленгатор радиосигналов (фиг. 4) выполняет функцию обнаружения и определения угловых направлений прихода сигнала источника радиоизлучения (ИРИ). ПР работает по принципу одноэтапного измерения угловых координат ИРИ.
Для решения этой задачи в состав оборудования входят специальные устройства аналогового и цифрового преобразования радиосигнала и специальный вычислитель 5-7, работающий по алгоритму одноэтапного определения угловых направлений на ИРИ. Значения угловых координат передаются в СПО диспетчера связи 12 для обработки. Управление ПР выполняется от СПО диспетчера связи 12 по локальной сети обмена данными. ПР задается частотный диапазон наблюдения, по которому выполняется автоматическое сканирование и поиск ИРИ с определением его угловых координат.
Диаграммообразующее устройство (ДОУ) 6 (фиг. 2)
Диаграммообразующее устройство выполнено на базе сосредоточенных компонентов по управлению фазовыми задержками радиосигнала при его прохождении по внутренним каналам обработки.
Принцип действия ДОУ основан на возможности раздельного управления амплитудами и фазами сигналов каждого элемента антенной системы с последующим их суммированием для создания амплитудно-фазового распределения, соответствующего заданной диаграмме направленности антенной решетки.
Основным элементом ДОУ является квадратурный амплитудно-фазовый модулятор.
Входной сигнал поступает на квадратурный фазовращатель, где расщепляется на две ортогональные составляющие. Каждая квадратурная составляющая при помощи двух противофазных фазовращателей 0°-180° и ключей дополнительно «доворачиваются» в нужный квадрант. Перестраиваемые аттенюаторы производят формирование амплитуд ортогональных составляющих, позволяя изменять амплитуду и фазу сигнала в пределах заданного квадранта на выходном сумматоре.
Принцип работы такого модулятора в фазовом режиме можно описать следующей формулой:
Uвых=Uвх⋅Sin(ωt+ϕ)=Uвх⋅Cos(ϕ)Sin(ωt)+Uвх⋅Sin(ϕ)⋅Cos(ωt).
В соответствии с этой формулой, для поворота выходного сигнала на угол ϕ в синусном канале необходимо регулировать амплитуду по закону U⋅Соs(ϕ), а в косинусном канале по закону U⋅Sin(ϕ). В этом случае амплитуда выходного сигнала будет постоянной и равна амплитуде входного сигнала.
В общем случае, при изменении, как фазы, так и амплитуды выходного сигнала исходная формула преобразуется к следующему виду
Uвых=Uвх⋅A(ϕ)⋅Sin(ωt+ϕ)=Uвх⋅А(ϕ)⋅Cos(ϕ)⋅Sin(ωt)+
+Uвх⋅А(ϕ)⋅Sun(ϕ)⋅Cos(ωt).
В этом случае в синусном канале регулировка амплитуды производится по закону Uвх⋅A(ϕ)⋅Cos(ϕ), а в косинусном канале - по закону Uвх⋅A(ϕ)⋅Sin(ϕ).
Управление ДОУ осуществляется от СПО диспетчера связи 12. Рассчитанные коэффициенты пересылаются в ДОУ для обеспечения когерентного сложения с заданного направления на выходе ДОУ 6.
Блок радиомодемов (БРМ) 7
БРМ 7 предназначен для предварительной аналоговой селекции радиосигнала, усиления и переноса спектра принятого сигнала на промежуточную частоту с последующим преобразованием и фильтрацией, и его преобразованием в цифровой вид для выполнения цифровой обработки сигнально-кодовой конструкции (СКК) рабочего сигнала радиомодема в демодуляторе модема.
В модуляторе модема выполняется адаптивное кодирование и формирование сигнально-кодовой конструкции рабочего сигнала в цифровом виде отсчетов спектра сигнала на нулевой частоте, который передается через оптический канал на устройство формирования выходного сигнала (УФВС) 9 (фиг. 2) для преобразования в аналоговый вид и усиления по мощности.
Одновременно с цифровыми сигналами отсчетов СКК через оптический канал в сторону УФВС 9 передается сигнал высокостабильной опорной частоты от опорного генератора БРМ 7.
БРМ 7 может принимать и формировать несколько рабочих сигналов, которые преобразуются в последовательный вид для переноса на высоких скоростях в сторону УФВС 9 по оптическому кабелю.
Сигналы от приемной ФАР 5-1 через ДОУ 6 могут приниматься в БРМ 7 на разных частотах связи по нескольким каналам приема.
Каждый из приемных каналов состоит из активного преселектора коротких волн (АПКВ), в котором выполняется предварительная аналоговая селекции радиосигнала, его усиление, перенос спектра сигнала на промежуточные частоты с фильтрацией.
Выходной сигнал АПКВ подается на свой канал демодулятора модема МСВМ-138-0 (МСВМ-138 - Модуль Специального Вычислителя Модема -138 (на базе процессора ОМАР- 138, dsp & arm 138 серии фирмы Ti), 0 - версия исполнения) (фиг. 12), где выполняется преобразование сигнала в цифровой вид и его последующая обработка.
От модуля МСВМ-138-0 в сторону мультиплексора формируется выходной сигнал модема в цифровой форме в виде пакетов от каждого модема.
В мультиплексоре к каждому пакету добавляется пакет информации о направлении передачи в виде расчетных значений фазы для синтезатора сигнала на несущей частоте. Дополнительно в оптический канал добавляется пакет управляющих команд УФВС 9.
Устройство формирования выходного сигнала (УФВС) 9
Устройство формирования выходного сигнала выполняет многоканальное и многочастотное формирование спектра рабочих сигналов с нулевой частоты на несколько частот связи. Такое преобразование выполняется для пространственного сложения энергии усилителей мощности с передающих элементов ФАР в заданном направлении на заданной частоте.
Входной демультиплексор и узел управления УФВС 9 принимает цифровой поток сигналов из оптического кабеля, разбирает пакеты и направляет их в каналы обработки, где происходит преобразование потока в отсчеты канала связи с номера радиомодема и параметров направления связи (фаза сигнала несущей, значение несущей частоты и ее амплитуда).
Каждое направление связи формирует свой поток отсчетов модулятора модема на несколько синтезаторов (по числу размерности ФАР), где у каждого синтезатора устанавливается своя начальная фаза несущей частоты связи в цифровом виде.
Выходной поток всех направлений связи, состоящий из отсчетов несущих частот, суммируется на входе цифро-аналогового преобразователя антенного элемента (ЦАП АЭ) в сложный групповой сигнал.
Сложный сигнал с выхода ЦАП через фильтр и усилитель мощности подается на антенный элемент ФАР.
В модуле синтезатора происходит перенос сигнально-кодовой конструкции (СКК) рабочего сигнала модулятора модема на несущую частоту, которая задается для одного из направлений связи.
Передающая ФАР 10
Передающая ФАР 10 состоит из антенных элементов, размещенных в фиксированных точках пространства, к которым подводится радиосигнал с выходных широкополосных усилителей мощности.
Координаты установки антенного элемента выбираются исходя из требуемой зоны излучения ФАР.
Локальная сеть передачи данных (СПД) 11
Локальная СПД обеспечивает транспорт команд управления между сопряженными устройствами и данных от клиента для передачи по заданным направлениям связи.
Специальное программное обеспечение диспетчера связи (СПО) 12
СПО диспетчера связи 12 состоит из подмножества управляющих и обрабатывающих программ целевого назначения радиолинии.
Таким образом, рассматриваемая система обнаружения подводных и надводных объектов обеспечивает формирование цифровой траектории отсчетов координат в виде интерактивного отображения траектории движения ПНО за счет пассивного обнаружения источников радиоизлучения ПНО.
Литература
1. Некоторые аспекты в развитии систем освещения надводной и подводной обстановки ВМФ России и ВМС США. Морской сборник, №8, 2009.
2. Е. Ряписов. Гидроакустические станции с гибкими протяженными буксируемыми системами ВМС США. Зарубежное военное обозрение, №9, 1995.
3. С. Пичугин. Состояние и перспективы развития систем гидроакустического наблюдения ВМС США. Зарубежное военное обозрение, №6, 2010.
4. Волоконно-оптическая система мониторинга «Дунай». Фотон-Экспресс, №5 (117), 2014.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО НЕЗАВИСИМОГО ВОЗДУШНОГО НАБЛЮДЕНИЯ В ДАЛЬНЕЙ ЗОНЕ НАВИГАЦИИ | 2017 |
|
RU2663182C1 |
| АДАПТИВНАЯ РАДИОЛИНИЯ ПЕРЕДАЧИ ДАННЫХ ДЕКАМЕТРОВОГО ДИАПАЗОНА РАДИОВОЛН | 2017 |
|
RU2658591C1 |
| СИСТЕМА ДЕКАМЕТРОВОЙ СВЯЗИ ЧЕРЕЗ ИОНОСФЕРУ | 2017 |
|
RU2680312C1 |
| Система пассивной локации для определения координат летательного аппарата в ближней зоне аэродрома и на этапе захода на посадку с резервным каналом определения дальности | 2016 |
|
RU2633380C1 |
| Интеллектуальная сетевая система мониторинга охраняемой территории нефтегазовой платформы в ледовых условиях | 2019 |
|
RU2715158C1 |
| СИСТЕМА РАДИОСВЯЗИ С ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2017 |
|
RU2642490C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2793150C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| ТЕХНОЛОГИЯ УТОЧНЕННОГО ПОЗИЦИОНИРОВАНИЯ В ПОДВОДНОМ НАВИГАЦИОННОМ ПРОСТРАНСТВЕ МОБИЛЬНОГО ПОЛИГОНА | 2012 |
|
RU2507532C2 |
Изобретение относится к радиотехнике, а именно к методам и системам пассивной радиолокации, и может быть использовано для определения местоположения в трехмерном пространстве источника радиоизлучения (ИРИ), размещенного на подводных и надводных объектах (ПНО), за счет приема и последующей обработки электромагнитных волн, порожденных этим ИРИ. Система обнаружения подводных и надводных объектов, содержащая N приемных антенн, первый и второй аналого-цифровой преобразователь (АЦП), вычислитель, отличающаяся тем, что в нее дополнительно введены линейки сенсоров, коммутатор, входы которого соединены с выходами линеек сенсоров, а выход по радиолинии соединен с N приемными антеннами, малошумящий усилитель (МШУ), N входов которого соединены с N приемными антеннами, первый и второй многоканальные синхронные квадратурные приемники (МСКП), входы которых соединены соответственно с первым и вторым выходами малошумящего усилителя, а выходы - с первыми входами первого и второго аналого-цифровых преобразователей, первый и второй каналы обработки информации, первые входы которых соединены с выходами аналого-цифровых преобразователей, а выходы подключены к вычислителю; управляющий контроллер, подключенный по входу к вычислителю, первый выход которого подключен ко второму входу первого многоканального синхронного квадратурного приемника, ко второму входу первого аналого-цифрового преобразователя и ко второму входу первого канала обработки информации, а второй выход - ко второму входу второго многоканального синхронного квадратурного приемника, ко второму входу второго аналого-цифрового преобразователя и ко второму входу второго канала обработки информации; диаграммообразующее устройство (ДОУ), N входов которого соединены с N приемными антеннами; блок радиомодемов, первый вход которого соединен с выходом диаграммообразующего устройства; волоконно-оптическая линия связи, входы которой соединены с выходами блока радиомодемов; устройство формирования выходного сигнала, входы которого соединены с выходами волоконно-оптической линии связи; передающая фазированная антенная решетка, входы которой соединены с выходами устройства формирования выходного сигнала; локальная система передачи данных, подключенная к выходу вычислителя, ко второму входу диаграммообразующего устройства, ко второму и третьему входам блока радиомодемов; специальное программное обеспечение диспетчера связи, соединенное линией связи с локальной сетью передачи данных; командный пункт, соединенный линией связи со специальным программным обеспечением диспетчера связи. 3 н. и 1 з.п. ф-лы, 13 ил.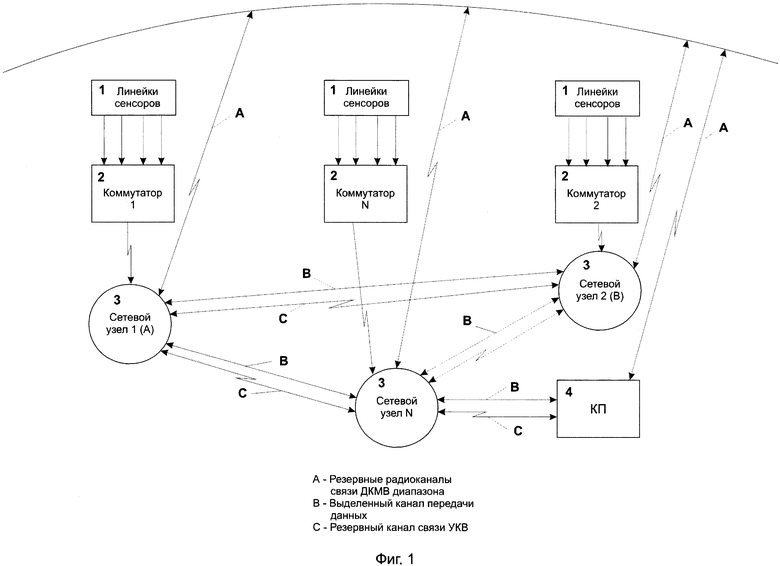
1. Система обнаружения подводных и надводных объектов, содержащая N приемных антенн, первый и второй аналого-цифровой преобразователь (АЦП), вычислитель, отличающаяся тем, что в нее дополнительно введены линейки сенсоров, коммутатор, входы которого соединены с выходами линеек сенсоров, а выход по радиолинии соединен с N приемными антеннами, малошумящий усилитель (МШУ), N входов которого соединены с N приемными антеннами, первый и второй многоканальные синхронные квадратурные приемники (МСКП), входы которых соединены соответственно с первым и вторым выходами малошумящего усилителя, а выходы - с первыми входами первого и второго аналого-цифровых преобразователей, первый и второй каналы обработки информации, первые входы которых соединены с выходами аналого-цифровых преобразователей, а выходы подключены к вычислителю; управляющий контроллер, подключенный по входу к вычислителю, первый выход которого подключен ко второму входу первого многоканального синхронного квадратурного приемника, ко второму входу первого аналого-цифрового преобразователя и ко второму входу первого канала обработки информации, а второй выход - ко второму входу второго многоканального синхронного квадратурного приемника, ко второму входу второго аналого-цифрового преобразователя и ко второму входу второго канала обработки информации; диаграммообразующее устройство (ДОУ), N входов которого соединены с N приемными антеннами; блок радиомодемов, первый вход которого соединен с выходом диаграммообразующего устройства; волоконно-оптическая линия связи, входы которой соединены с выходами блока радиомодемов; устройство формирования выходного сигнала, входы которого соединены с выходами волоконно-оптической линии связи; передающая фазированная антенная решетка, входы которой соединены с выходами устройства формирования выходного сигнала; локальная система передачи данных, подключенная к выходу вычислителя, ко второму входу диаграммообразующего устройства, ко второму и третьему входам блока радиомодемов; специальное программное обеспечение диспетчера связи, соединенное линией связи с локальной сетью передачи данных; командный пункт, соединенный линией связи со специальным программным обеспечением диспетчера связи.
2. Координаты подводных и надводных объектов по п. 1 оцениваются в форме трехэлементного вектора в декартовой системе координат и осуществляются путем поиска безусловного глобального максимума целевой функции, составленной из содержащих информацию об оцениваемом параметре слагаемых решающей функции, сформированной с использованием метода максимального правдоподобия для модели стационарных в широком смысле гауссовских радиосигналов при известных отсчетах спектров, вычисленных по принятым сигналам с использованием алгоритма быстрого преобразования Фурье.
3. Антенная система, используемая в системе обнаружения подводных и надводных объектов по п. 1, состоит из активной фазированной антенной решетки (АФАР), структурно реализованной в виде системы из кольцевых антенных подрешеток слабонаправленных активных элементов, концентрически размещаемых на разборной вертикальной мачте, высотой до 18 м и отличающаяся тем, что формирует оптимальное, в смысле критерия минимизации среднеквадратичной ошибки оцениваемых параметров, приближение равномерной диаграммы направленности в верхней полусфере за счет размещения от одной до девяти кольцевых подрешеток радиуса от 0,5 до 2 м и с числом элементов от 3 до 13 в каждой подрешетке, а также регулировки расстояния между подрешетками по высоте, с минимальным расстоянием 0,5 м и угла поворота каждой кольцевой антенной подрешетки относительно других подрешеток.
4. Система по п. 1, отличающаяся тем, что в качестве сети передачи данных используются линии УКВ, ДКМВ и оптоволоконной связи.
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ ПРИ ИХ ВТОРЖЕНИИ В ОХРАНЯЕМУЮ ЗОНУ | 2013 |
|
RU2559701C2 |
| WO 2008093088 A2, 07.08.2008 | |||
| US 5886661 A1, 23.03.1999 | |||
| Способ классификации целей, адаптированный к гидроакустическим условиям | 2016 |
|
RU2624826C1 |
| CN 103544792 A, 29.01.2014. | |||

