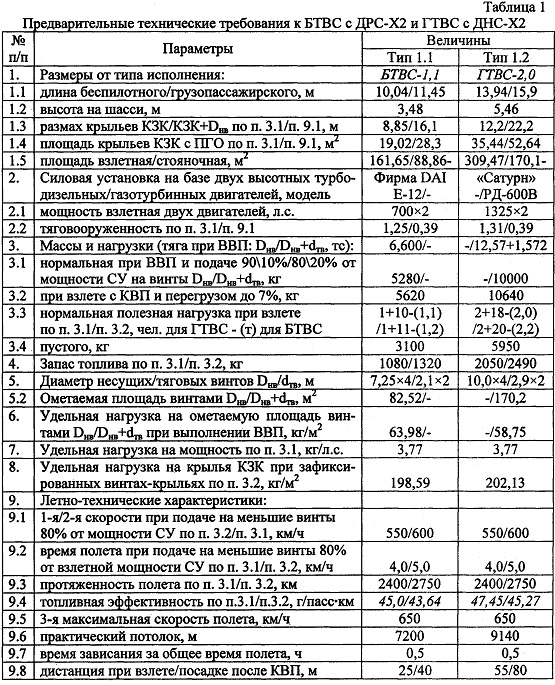
Изобретение относится к области авиационной техники и может быть использовано в конструкции беспилотных и гибридных тяжелых вертолетов-самолетов с движительно-рулевой системой и поперечно-несущей схемой, включающей на законцовках крыльев замкнутой конструкции (КЗК) две пары соосных с противоположным вращением однолопастных винтов, обеспечивающих вертикальный и короткий взлет / посадку (ВВП и КВП), и два винта на переднем горизонтальном оперении для скоростного полета при зафиксированных лопастях двух верхних и двух нижних соосных винтов-крыльев, размещенных соответственно над передним и под задним КЗК.
Известен конвертоплан Elytron 10S компании Elytron Aircraft (США), содержащий из композитных материалов планер с КЗК и вертикальным килем, законцовка которого связана с задним крылом обратной стреловидности, образующим с передним стреловидным низко расположенным крылом коробчатую конфигурацию КЗК, имеющую внутри ее вблизи центра масс прямое поворотное крыло, на консолях которого смонтированы в мотогондолах двигатели с редукторами и винтами, создающими горизонтальную и соответствующим их отклонением вертикальную тягу.
Признаки, совпадающие - наличие на цельно-поворотном крыле (ЦПК) мотогондол с винтами, преобразующими горизонтальную тягу в вертикальную соответствующим их отклонением вверх от горизонтального положения на угол 90°, диапазон поворота консолей ЦПК от 0° до +100°, вращение винтов - синхронизирующее. Система КЗК с крыльями большого удлинения обеспечивают большую прочность и создают минимальное значение индуктивного сопротивления, что позволит в комбинации с ЦПК уменьшить на них удельную нагрузку, достичь максимальной скорости 667 км/ч и дальности полета до 2398 км. Кроме того, прямое ЦПК с КЗК создают прирост подъемной силы на 15%, что эффективно также для выполнения КВП.
Причины, препятствующие поставленной задаче: первая - это то, что расположение на прямом ЦПК двигателей с редукторами и винтами, имеющими автоматы перекосов с управлением их общего, циклического и дифференциального изменения их шага и, как следствие, значительно осложняет конструкцию, а постоянные вибрации, возникающие при работе автоматов их перекоса, создают неблагоприятные условия для работы других механизмов. Вторая - это то, что диаметры двух винтов ограничены размахом Lкр=13,09 м консолей КЗК коммерческого конвертоплана Elytron 10S и, как следствие, винты Dв=4,02 м предопределяют удельную нагрузку на ометаемую площадь винтами ρS=236,5 кг/м2 при взлетном его весе 6 тонн с взлетной площадки равной стояночной 187,19 м2 и при удельной взлетной/стояночной возможности по полезной нагрузке (ПН) 5,8763/5,8763 кг/м2 при ПН=1,1 тонна. Третья - это то, что ЦПК с винтами при увеличении угла атаки крыла на переходных режимах полета, без наличия интегрирующего устройства управления тягой винтов создают опасность появления на ЦПК срыва потока до создания винтами необходимой подъемной силы, что ухудшает стабильность и управляемость. Четвертая - это то, что переднее низко расположенное стреловидное крыло КЗК и высокорасположенное ЦПК с винтами, смонтированное вблизи центра масс, осложняет погрузку и выгрузку десяти пассажиров. Все это уменьшает надежность и ограничивает возможность увеличения взлетного веса и повышения эффективности энергозатратной СУ (с удельной нагрузкой на мощность ρN=1,5 кг/л.с.), особенно, без возможности увеличения диаметра винтов и улучшения показателей топливной эффективности менее чем 62,55 г/пасс.⋅км.
Известен беспилотный тяжелый конвертоплан "Фрегат" ЗАО "Транзас" (РФ), содержащий из композитных материалов планер с КЗК и килем, законцовка которого связана с задним крылом обратной стреловидности, образующим с передним стреловидным низко расположенным крыломкоробчатую конфигурацию КЗК, имеющую в ее центре по бокам фюзеляжа два поворотных кольцевых канала с винтами, создающими горизонтальную и соответствующим их отклонением вертикальную тягу, синхронизирующую трансмиссию валов, связывающую между собой два двигателя с поворотными винтами и хвостовым рулевым фенестроном, смонтированным за килем.
Признаки, совпадающие - наличие двух поворотных кольцевых каналов с тянущими винтами, преобразующими горизонтальную тягу в вертикальную соответствующим их отклонением вверх от горизонтального положения на угол 90°, диапазон поворота кольцевых каналов от 0° до +100°, вращение винтов - синхронизирующее. Крылья в системе КЗК большого удлинения, несущая система имеет два больших поворотных винта с меньшим кормовым рулевым фенестроном для продольного управления. Все винты и фенестрон без автоматов перекосов с управлением их общего и дифференциального изменения шага, но и вращательно связаны посредством Т-образной в плане синхронизирующей системы соединительных валов трансмиссии.
Причины, препятствующие поставленной задаче: первая - это то, что внешние консоли переднего крыла для уменьшения стояночной площадки выполнены складными, приведя его размах с 19 до 10 м и взлетную/стояночную площадь с 270,75 до 140,25 м2 соответственно при удельной взлетной/стояночной возможности по полезной нагрузке 3,6934/7,1301 кг/м2 при ПН=1 тонна. Вторая - это то, что диаметры винтов ограничены размахом внутренних секций заднего крыла КЗК, а взлетная мощность СУ 4800 л.с. предопределяет Dв=4,6 м и удельную нагрузку на ометаемую площадь винтами ρS=210,72 кг/м2 при взлетном весе 7 тонн. Третья - это то, что профилированные поворотные кольцевые каналы с винтами и с увеличением их угла атаки на переходных режимах полета, без наличия интегрирующего устройства управления тягой несущих и рулевого винтов создают опасность появления на поворотных каналах срыва потока до создания винтами необходимой подъемной силы, что ухудшает стабильность и продольную управляемость. Четвертая - это то, что рулевой фенестрон продольного управления, выполненный многолопастным с изменяемым шагом, установлен за вертикальным килем и смонтирован на конце хвостовой балки, что предопределяет использование специального интегрирующего устройства управления. Все это усложняет конструкцию и уменьшает надежность, но и ограничивает возможность увеличения скорости более 600 км/ч, взлетного веса и повышения весовой отдачи и, особенно, без дальнейшего увеличения диаметра канальных винтов.
Наиболее близким к предлагаемому изобретению является экспериментальный скоростной винтокрыл модели Ка-22 ОКБ «им. Камова» (РФ), имеющий на концах крыла несущие винты с редукторами и двигателями силовой установки (СУ), связанными соединительными валами, которые приводят во вращение пропеллеры и несущие винты, размещенные соответственно спереди гондол двигателей и над последними на пилонах крыла, содержит фюзеляж и хвостовое оперение.
Признаки, совпадающие - на концах крыла умеренного удлинение λ=5,4 и размаха 23,8 м имеются пилоны с несущими винтами диаметром 22,5 м, вращающимися в противоположных направлениях. Каждый несущий винт, вал которого отклонен вперед по полету, имеет автомат перекоса с управлением общего и циклического изменения его шага, предназначен для создания подъемной и пропульсивной силы, а поступательное движение в скоростном полете обеспечивают в большей степени пропеллеры. Два турбовинтовых двигателя Д-25 ВК мощностью по 5500 л.с., используемых 95% их мощности при ВВП и ее меньшую часть при горизонтальном полете соответственно на привод несущих винтов (почти 15% при взлетном весе Gвз=42500 кг) при создании ими подъемной силы и пропульсивной тяги, но и пропеллеров АВ-62, расположенных спереди гондол двигателей, обеспечивающих горизонтальную тягу только при крейсерском полете, особенно, когда несущие винты станут вращаться на режиме близко к самовращению, как у автожира, создавая только подъемную силу при горизонтальном полете (авторотирующие несущие винты используются как несущие поверхности, не создавая пропульсивной тяги), а потребную при этом маршевую тягу для горизонтального полета будут создавать пропеллеры, что обеспечит винтокрылу более высокую экономичность, чем у вертолета, а высокая тяговооруженность его силовой установки, имеющей удельную нагрузку на мощность ρN=3,4 кг/л.с., может создавать диапазон скоростей полета 340…356 км/ч с ПН=6,0 тонн и после выполнения ВВП при взлетном его весе 37500 кг, обеспечивая при этом и дальность полета до 1100 км. Испытания Ка-22 показали, что при взлете с разбегом 190 м вес ПН взрастает до 10 тонн (при Gвз=42500 кг). При его посадке «по-самолетному» (Gвз=35500 кг) посадочная дистанция менее 130 м. При скорости полета свыше 150 км/ч винтокрыл Ка-22 вел себя как самолет и крыло при этом несет 60% его взлетного веса.
Причины, препятствующие поставленной задаче: первая - это то, что винтокрыл имеет двойную раздельную систему создания подъемной силы и горизонтальной тяги, что неизбежно ведет к его утяжелению и снижению весовой отдачи, особенно, с пропеллерами, смонтированными под несущими винтами, но и увеличению объема регламентных работ и удорожанию эксплуатации несущих винтов, имеющих автоматы перекоса с управлением общего и циклического изменения их шага и, как следствие, значительно осложняет конструкцию, а постоянные вибрации, возникающие при работе автоматов их перекоса, создают неблагоприятные условия для работы других механизмов и оборудования. Вторая - это то, что на режиме висения поток от несущих винтов, обдувая консоли «самолетного» крыла площадью 105,0 м2 и создавая значительную (почти 12,5%) общую потерю в их вертикальной тяге, затормаживается. При этом скоростной воздушный поток, отбрасываемый от крыла и даже при отклоненных закрылках и со средней аэродинамической хордой крыла равной 3,9 м, предопределяет образование вихревых колец, которые могут на низких скоростях снижения резко уменьшать силу тяги несущих винтов и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. А по мере роста скорости горизонтального полета проблема также усугубляется, поскольку на отступающей стороне каждого несущего винта над фюзеляжем возникает участок, в котором абсолютная скорость его лопастей относительно воздуха становится практически нулевой и этот участок лопастей, естественно, в создании подъемной силы не участвует, что ухудшает уравновешивание в поперечном канале, особенно, из-за расположения этих участков как раз над консолями крыла. Третья - это то, что в винтокрыле поперечной схемы с двумя винтомоторными и движительно-несущими винтовыми системами, смонтированными на концах высокорасположенного крыла соответственно в подкрыльных гондолах и надкрыльевых пилонах, предопределяет конструктивно сложное прямое крыло, оснащенное сложной системой редуцирования несущих винтов и пропеллеров в общем редукторе и не имеющее корневую хорду больше концевой, что увеличивает и индуктивные потери. Четвертая - это то, что для обеспечения прочности и жесткости крыла большого размаха, необходимо увеличивать строительную высоту крыла и площадь сечения силовых элементов, что приводит к значительному увеличению веса конструкции, увеличению лобового сопротивления и, как следствие, к снижению скорости и весовой отдачи. Пятая - это то, что расположение двух пропеллеров под несущими винтами усложняет конструкции и приводит к увеличению ее габаритов и вредного сопротивления, но и к значительному повышению уровня шума вследствие взаимовлияния пропеллеров и несущих винтов. Кроме того, в такой конструкции, не исключалось появление самовозбуждающихся колебаний, высоких переменных напряжений и вибраций, а также и других видов динамической неустойчивости конструкции, в том числе одного из опаснейших - воздушного резонанса несущих винтов на упругом основании. Возникновение резонанса в поперечной схеме увеличивалось из-за наличия тяжелых гондол с винтомоторными установками на концах ферменных консолей крыла, имеющих главные опоры с подкосками неубирающегося колесного шасси, вследствие чего собственные частоты колебаний конструкции оказывались соизмеримы с частотой вращения несущих винтов. Другим недостатком является то, что турбовальные двигатели со свободной турбиной позволяют уменьшить частоту вращения несущих винтов только на 10-12%, а уменьшение частоты их вращения до 40% потребует использование различного рода муфт и коробок скоростей. Что значительно утяжеляет конструкцию и обеспечивает, уменьшая вес топлива, более высокий удельный расход топлива и, как следствие, ограничивает возможность повышения скорости полета и дальности действия, но и показателей транспортной и, особенно, топливной эффективности.
Предлагаемым изобретением решается задача в указанном выше известном экспериментальном скоростном винтокрыле модели Ка-22 увеличения полезной нагрузки и весовой отдачи, уменьшения потребной мощности на продольную балансировку при висении и улучшения продольной управляемости, повышения скороподъемности, скорости и дальности полета, а также исключения самовозбуждающихся колебаний, высоких переменных напряжений, вибраций и возникновение резонанса.
Отличительными признаками предлагаемого изобретения от указанного выше известного скоростного винтокрыла модели Ка-22, наиболее близкого к нему, являются наличие того, что он снабжен двумя системами с разновеликими винтами в движительно-рулевой (ДРС) и поперечно-несущей удвоенной (ПНУС) в схеме ПНУС-Х2×2, включающей на законцовках крыльев замкнутой конструкции (КЗК), имеющей при виде сверху ромбовидную конфигурацию, две пары соосных с противоположным вращением двух однолопастных больших винтов, обеспечивающих подъемную силу при выполнении зависания и вертикального или короткого взлета/посадки (ВВП или КВП), и двухвинтовую ДРС-Х2 с тянущими меньшими винтами, смонтированным на консолях V-образного переднего горизонтального оперения (ПГО), имеющего обратную стреловидность по передней кромке и развитые элевоны, для скоростного полета при зафиксированных лопастях-крыльях двух верхних и двух нижних несущих винтов с профилированными противовесами обратного сужения, размещенных соответственно над передними и под задними консолями КЗК, имеющими их размах (Lкр) больше в 1,22 раза, чем два радиуса (Rнв) больших несущих винтов, и образующими при виде спереди от плоскости симметрии трапециевидные коробчатые конфигурации соответственно высокорасположенным передним крылом прямой стреловидности (КПС) с положительным углом поперечного V и над ним задним крылом обратной стреловидности (КОС) с отрицательным углом поперечного V, корневые части которого смонтированы по внешним поверхностям вертикального оперения, имеющего в качестве руля направления над верхней поверхностью заднего КОС цельно-поворотную концевую его часть и обратную стреловидность по передней кромке с эллиптической соответствующей задней кромкой, но и обеспечивающими возможность преобразования полетной его конфигурации при выполнении технологии ВВП или КВП с вертолета четырехвинтовой ПНУС-Х2×2 и рулевой ДРС-Х2 соответственно или в скоростной винтокрыл с ДРС-Х2 и четырехвинтовой ПНУС-Х2×2, или в самолет с двухвинтовой ДРС-Х2 при зафиксированных лопастях-крыльях верхних и нижних несущих соосных однолопастных винтов, лопасти которых от законцовок крыльев КЗК вынесены в противоположные стороны и размещены перпендикулярно соответственно от и к плоскости симметрии, увеличивая их площадь и размах на два радиуса несущих винтов, но и обратно, при этом несущие соосные однолопастные нижние и верхние винты, закрепленные на соответствующих выходных валах консольных редукторов, каждый из которых, размещенный на законцовке переднего КПС системы КЗК в каплевидном нижнем обтекателе, имеющем продольную ось, параллельно расположенную оси симметрии, снабжен удлиненным верхним валом, выступающая из втулки верхнего несущего винта его часть сцентрирована и установлена соосно с возможностью его вращения совместно с втулкой винта в подшипниковом узле каплевидного верхнего обтекателя заднего большого удлинения КОС, оснащенного внешними флапперонами и внутренними закрылками, образуя высокорасположенный биплан КЗК с передним большого удлинения валовым КПС, обеспечивающим непосредственное управление подъемной силой и имеющим площадь, составляющую 45% от общей площади биплана, оснащено с обратным сужением цельно-поворотным закрылком (ЦПЗ), снабженным возможностью его отклонения вниз на углы 20°, 40° и 75° и преобразующим при максимальном отклонении ЦПЗ переднее КПС в крыло с консолями обратного сужения, создающими в зоне максимальных индуктивных скоростей воздушного потока от соответствующих несущих винтов возможность повышения коэффициента подъемной силы переднего КПС и несущей его способности, особенно, при обдуве его консолей соосными несущими однолопастными винтами, размещенными в полностью симметричной и синхронно-сбалансированной ПНУС-Х2×2 и на поперечной оси, проходящей над центром масс, но и уменьшения при этом на 12% потерь подъемной силы от обдувки его консолей, и препятствования обратному перетеканию воздушного потока, причем ДРС-Х2 с тянущими флюгерно-реверсивными меньшими левым и правым винтами изменяемого шага, имеющими направление вращения верхних их лопастей при виде спереди от соответствующих внешних бортов фюзеляжа и выполненными с жестким креплением их лопастей и без автоматов их перекоса при создании ими маршевой тяги как при горизонтальном скоростном полете, так и прямой и обратной горизонтальной тяги ДРС-Х2 при выполнении ВВП и зависания для поступательного соответствующего перемещения вдоль продольной его оси, но и горизонтальной разнонаправленной и прямой тяги ДРС-Х2 для создания моментов соответственно рыскания и по тангажу при предварительном соответствующем отклонении развитых элевонов ПГО, при этом с целью снижения шума и вибрации конструкции от всех несущих винтов, создающих воздушные потоки, которые не взаимодействуют между левой и правой группой соосных однолопастных винтов, выполненных без управления циклического изменения их шага и с жестким креплением их лопастей и профилированных противовесов, но и создания от всех несущих винтов полной компенсации реактивных крутящих моментов при противоположном направлении вращения между винтами в каждой как левой и правой, так и верхней и нижней их группе, но и одинакового направления вращения в каждой паре противоположно расположенных по высоте несущих винтах, например, при виде сверху левый верхний винт с правым нижним винтом вращаются по часовой стрелке, а правый верхний винт с нижним левым винтом вращаются против часовой стрелки, что обеспечивает устранение гироскопического эффекта и создание более плавного обтекания воздушным потоком от соответствующих винтов соответственно переднего КПС и заднего КОС, причем с целью повышения безопасности и уменьшения аэродинамической интерференции несущих винтов ПНУС-Х2×2 и меньших винтов ДРС-Х2, последние из которых вынесены от грузопассажирского отсека и смонтированы на консолях V-образного ПГО таким образом, что при создании меньшими винтами горизонтальной тяги линия действия пропульсивой их силы размещена при виде спереди между плоскостями вращения верхнего и нижнего соосных несущих винтов, имеющих вращение при виде сверху, при котором наступающая лопасть нижних левого и правого винтов проходили бы над соответствующим бортом фюзеляжа от кормовой к носовой его части, при этом система трансмиссии, включающая наряду с синхронизирующим многоуровневым редуктором, имеющим в направлении полета два нижних обратной V-образности в плане выходных вала для передачи крутящего момента, например, от газотурбинных или турбодизельных двигателей (ГТД или ТДД) к консольным редукторам соосных групп больших несущих винтов на законцовках переднего КПС, снабжен на нижнем уровне третьим выходным продольным валом, соединенным с передним V-образным в поперечной плоскости промежуточным Y-образным в плане редуктором, передающим поперечными валами крутящий момент к передней группе меньших винтов на ПГО, выполнен с возможностью при выполнении ВВП или зависания плавного перераспределения 90% и 10% взлетной мощности СУ соответственно на большие несущие винты ПНУС-Х2×2 и двухвинтовую ДРС-Х2 и оснащен двумя средними входными валами, связанными соединительными валами с ГТД, выполненными для отбора их взлетной мощности с задним выводом вала, каждый из последних, образуй синхронизирующую систему, снабжен муфтами свободного хода, выдающими, отключая от трансмиссии в горизонтальном скоростном полете любой избыточный ГТД и один любой в случае его отказа или оба ГТД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет для аварийной посадки соответственно с авторотирующими или нагруженными левыми и правыми соосными несущими винтами, причем при выполнении ВВП и зависания на двухвинтовую ДРС-Х2 главным редуктором перераспределяется 10% от взлетной мощности СУ, а остальная ее мощность перераспределяется поровну на все соосные несущие винты при удельной нагрузке на мощность СУ, равной ρN=3,77 кг/л.с.
Кроме того, упомянутое ПГО выполнено с цельно-поворотными его консолями, изменяющими вектор тяги двухвинтовой движительно-несущей системы (ДНС), причем при выполнении ВВП и зависания главным редуктором на двухвинтовую ДНС-Х2 перераспределяется 20% от взлетной мощности СУ, а остальная ее мощность перераспределяется поровну на упомянутые соосные несущие винты, при этом передние поворотные винты ДНС-Х2 и упомянутые соосные несущие винты задней группы размещены соответственно в направлении полета спереди и сзади от центра масс и имеют соответственно при выполнении ВВП и зависания большее и меньшее расстояния от вертикальных их осей вращения до центра масс, но и возможность преобразования его полетной конфигурации с вертолета шестивинтовой несущей схемы, включающей два поворотных винта ДНС-Х2 и четыре упомянутых соосных несущих винта, в самолет с двухвинтовой ДНС-Х2 при зафиксированных соответствующим образом всех лопастях-крыльях упомянутых соосных несущих винтов и перераспределением главным редуктором 80% от взлетной мощности СУ поровну только на поворотные винты ДНС-Х2, но и обратно, при этом каждая из цельно-поворотных консолей упомянутого ПГО, имеющего раздельные узлы их поворота, создает возможность в вертикальной продольной плоскости синхронного их отклонения с меньшими винтами, располагает размахом, обеспечивающим на режимах ВВП и висения как уменьшение потерь тяги последних, так и вращения без взаимного влияния и их перекрытия с соосными несущими винтами соответственно при создании ими вертикальной и горизонтальной тяги на соответствующих режимах полета или наклонной тяги для выполнения технологии КВП при синфазном их отклонении вверх на угол +45°, причем синфазное и дифференциальное отклонение консолей ПГО от горизонтального положения вверх/вниз на угол +15°/-15° и на угол ±15° на скоростных режимах горизонтального полета создает соответственно продольное и поперечное управление, а при выполнении ВВП и зависания их дифференциальное и синфазное отклонение от вертикального положения вперед/назад на угол ±15° и на угол +15°/-15° обеспечивает соответственно путевое управление и в направлении полета соответствующего поступательного перемещения вперед/назад, обеспечивающего возможность и висения в воздухе, не перемещаясь соответственно при встречном/попутном ветре с одновременным автоматическим обеспечением стабилизации как по угловой скорости тангажа и крена, так и демпфирования изменений высоты полета, при этом при создании двумя винтами ДНС-Х2 подъемной и управляющей силы при выполнении ВВП и зависания, а их наклонное расположение на консолях ПГО отклоняет ось вращения каждого меньшего винта, размещенной параллельно хорде ПГО, к плоскости симметрии во внутрь, что улучшает маневренность, продольную и путевую управляемость, причем упомянутое вертикальное оперение, имеющее прямую стреловидность по задней его кромке и эллиптическую соответствующую переднюю кромку, содержит соответствующие кромки в цельно-поворотной концевой его части.
Кроме того, электрическая СУ, включающая два левых и два правых обратимых электромотора-генератора (ОЭМГ), каждая пара из которых вращательно связана с соответствующими соосными несущими винтами посредством упомянутых консольных редукторов, смонтированных на упомянутых концевых частях КЗК, и, как следствие, упрощается конструкция соединительных валов трансмиссии, связывающих консольные редукторы с главным редуктором, при этом ОЭМГ, имеющие два способа их работы - потреблять электрическую мощность от накопителей и вырабатывать ее для восполнения последних, обеспечивают соответственно при работе всех ОЭМГ в режиме электромоторов как передачу пиковой их мощности на соосные несущие винты для создания подъемной силы при выполнении ВВП или зависания, так и возможность в полетной конфигурации крылатого автожира при авторатации соосных несущих винтов осуществления подзарядки быстро заряжаемых накопителей при работе всех ОЭМГ в режиме ветрогенераторов, причем поворотные винты ДНС-Х2 с их редукторами, каждый их которых вращательно связан упомянутыми поперечными валами трансмиссии с главным редуктором, приводимым, например, ТДД и создающие при выполнении ВВП и зависания как вертикальную подъемную силу, так и необходимые управляющие моменты, но и от левого и правого поворотных винтов, имеющих при виде сверху направления вращения соответственно по часовой и против часовой стрелки, обеспечивают полную компенсацию реактивных крутящих моментов между поворотными винтами, при этом электрическая СУ выполнена по параллельно-последовательной гибридной технологии с системой электропривода, включающей ОЭМГ, вращательно связанные с соответствующим соосными несущими винтами, накопители - аккумуляторные быстро перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим ОЭМГ и ТДД, переключающим генерирующую мощность и порядок подзарядки аккумуляторов и снабженной возможностью реализации двух способов работы с внутренним источником энергии - ТДД с генератором, установленными в двигательном отсеке фюзеляжа перед центром масс, при этом ТДД, вращательно связан с входным валом главного редуктора через коробку передач, которая передает взлетную его мощность на режимах ВВП и зависания только на поворотные винты ДНС-Х2 или перераспределяет крутящий момент как на главный редуктор, имеющий упомянутые поперечные валы трансмиссии, проложенные в упомянутых внутренних секциях ПГО к редукторам поворотных винтов, так и генератор, предназначенный для выработки наравне с ОЭМГ-ветрогенераторами совместной генерирующей электрической мощности при требуемой быстрой подзарядке аккумуляторов с обеспечением необходимых крейсерских режимов его полета в конфигурации крылатого автожира.
Кроме того, для корабельного его базирования упомянутые левая и правая пара соосных несущих винтов снабжены в стояночной конфигурации возможностью после их остановки фиксированного размещения и установки их лопастей параллельно оси симметрии, при этом упомянутая гибридная его электрическая СУ, питаемая от внутреннего или внешнего источника энергии, обеспечивает два способа его функционирования соответственно в конфигурации привязного (для энергозатратного вертикального взлета) или в конфигурации автономного (для горизонтального крейсерского полета) беспилотного тяжелого вертолета-самолета (БТВС), связанного посредством автоматического узла стыковки/расстыковки отрывного его разъема через электроразъем бронированного кабеля со стартово-приемной платформой (СПП), устанавливаемой на транспортном средстве - авианесущем корабле, обеспечивающем его размещение, транспортирование и функционирование при его соответствующем передвижении в транспортно-походной конфигурации на СПП, имеющей электроустановку, работающую от вала отбора мощности двигателя транспортного средства, и/или встроенный дизельный электроагрегат со средствами накопления и подвода электроэнергии гибким кабелем, размотка/намотка которого при вертикальном стартовом взлете обеспечивается барабаном со следящим электроприводом, установленным в энергетическом отсеке СПП, причем после раскладывания концевых частей крыла в полетную конфигурацию, вертикального взлета и при наборе БТВС стартовой высоты в 50 метров обеспечивается отлет его вбок от СПП с последующим его барражирующим круговым облетом СПП, но и зависанием с последующим переключением электропитания на внутренний его источник при срабатывании средств его целеуказания, происходит расстыковка и вылет БТВС с отделением от его фюзеляжа гибкого кабеля посредством автоматического узла расстыковки, который имеет пиротолкатель, выбрасывающий парашют для его управляемого спуска на поверхность земли с соответствующей автоматической подмоткой кабеля на барабан СПП.
Благодаря наличию этих признаков, позволяющих освоить многоцелевой БТВС, который снабжен двумя системами с разновеликими винтами в движительно-рулевой (ДРС) и поперечно-несущей удвоенной (ПНУС) в схеме ПНУС-Х2×2, включающей на законцовках КЗК, имеющей при виде сверху ромбовидную конфигурацию, две пары соосных с противоположным вращением двух однолопастных больших винтов, обеспечивающих подъемную силу при выполнении зависания и ВВП или КВП, и двухвинтовую ДРС-Х2 с тянущими меньшими винтами, смонтированным на консолях V-образного ПГО, имеющего обратную стреловидность по передней кромке и развитые элевоны, для скоростного полета при зафиксированных лопастях-крыльях двух верхних и двух нижних несущих винтов с профилированными противовесами обратного сужения, размещенных соответственно над передними и под задними консолями КЗК, имеющими их размах (Lкр) больше в 1,22 раза, чем два радиуса (Rнв) больших несущих винтов, и образующими при виде спереди от плоскости симметрии трапециевидные коробчатые конфигурации соответственно высокорасположенным передним КПС с положительным углом поперечного V и над ним задним КОС с отрицательным углом поперечного V, корневые части которого смонтированы по внешним поверхностям вертикального оперения, имеющего в качестве руля направления над верхней поверхностью заднего КОС цельно-поворотную концевую его часть и обратную стреловидность по передней кромке с эллиптической соответствующей задней кромкой, но и обеспечивающими возможность преобразования полетной его конфигурации при выполнении технологии ВВП или КВП с вертолета четырехвинтовой ПНУС-Х2×2 и рулевой ДРС-Х2 соответственно или в скоростной винтокрыл с ДРС-Х2 и четырехвинтовой ПНУС-Х2×2, или в самолет с двухвинтовой ДРС-Х2 при зафиксированных лопастях-крыльях верхних и нижних несущих соосных однолопастных винтов, лопасти которых от законцовок крыльев КЗК вынесены в противоположные стороны и размещены перпендикулярно соответственно от и к плоскости симметрии, увеличивая их площадь и размах на два радиуса несущих винтов, но и обратно, при этом несущие соосные однолопастные нижние и верхние винты, закрепленные на соответствующих выходных валах консольных редукторов, каждый из которых, размещенный на законцовке переднего КПС системы КЗК в каплевидном нижнем обтекателе, имеющем продольную ось, параллельно расположенную оси симметрии, снабжен удлиненным верхним валом, выступающая из втулки верхнего несущего винта его часть сцентрирована и установлена соосно с возможностью его вращения совместно с втулкой винта в подшипниковом узле каплевидного верхнего обтекателя заднего большого удлинения КОС, оснащенного внешними флапперонами и внутренними закрылками, образуя высокорасположенный биплан КЗК с передним большого удлинения валовым КПС, обеспечивающим непосредственное управление подъемной силой и имеющим площадь, составляющую 45% от общей площади биплана, оснащено с обратным сужением ЦПЗ, снабженным возможностью его отклонения вниз на углы 20°, 40° и 75° и преобразующим при максимальном отклонении ЦПЗ переднее КПС в крыло с консолями обратного сужения, создающими в зоне максимальных индуктивных скоростей воздушного потока от соответствующих несущих винтов возможность повышения коэффициента подъемной силы переднего КПС и несущей его способности, особенно, при обдуве его консолей соосными несущими однолопастными винтами, размещенными в полностью симметричной и синхронно-сбалансированной ПНУС-Х2×2 и на поперечной оси, проходящей над центром масс, но и уменьшения при этом на 12% потерь подъемной силы от обдувки его консолей, и препятствования обратному перетеканию воздушного потока, причем ДРС-Х2 с тянущими флюгерно-реверсивными меньшими левым и правым винтами изменяемого шага, имеющими направление вращения верхних их лопастей при виде спереди от соответствующих внешних бортов фюзеляжа и выполненными с жестким креплением их лопастей и без автоматов их перекоса при создании ими маршевой тяги как при горизонтальном скоростном полете, так и прямой и обратной горизонтальной тяги ДРС-Х2 при выполнении ВВП и зависания для поступательного соответствующего перемещения вдоль продольной его оси, но и горизонтальной разнонаправленной и прямой тяги ДРС-Х2 для создания моментов соответственно рыскания и по тангажу при предварительном соответствующем отклонении развитых элевонов ПГО, при этом с целью снижения шума и вибрации конструкции от всех несущих винтов, создающих воздушные потоки, которые не взаимодействуют между левой и правой группой соосных однолопастных винтов, выполненных без управления циклического изменения их шага и с жестким креплением их лопастей и профилированных противовесов, но и создания от всех несущих винтов полной компенсации реактивных крутящих моментов при противоположном направлении вращения между винтами в каждой как левой и правой, так и верхней и нижней их группе, но и одинакового направления вращения в каждой паре противоположно расположенных по высоте несущих винтах, например, при виде сверху левый верхний винт с правым нижним винтом вращаются по часовой стрелке, а правый верхний винт с нижним левым винтом вращаются против часовой стрелки, что обеспечивает устранение гироскопического эффекта и создание более плавного обтекания воздушным потоком от соответствующих винтов соответственно переднего КПС и заднего КОС, причем с целью повышения безопасности и уменьшения аэродинамической интерференции несущих винтов ПНУС-Х2×2 и меньших винтов ДРС-Х2, последние из которых вынесены от грузопассажирского отсека и смонтированы на консолях V-образного ПГО таким образом, что при создании меньшими винтами горизонтальной тяги линия действия пропульсивой их силы размещена при виде спереди между плоскостями вращения верхнего и нижнего соосных несущих винтов, имеющих вращение при виде сверху, при котором наступающая лопасть нижних левого и правого винтов проходили бы над соответствующим бортом фюзеляжа от кормовой к носовой его части, при этом система трансмиссии, включающая наряду с синхронизирующим многоуровневым редуктором, имеющим в направлении полета два нижних обратной V-образности в плане выходных вала для передачи крутящего момента, например, от ГТД или ТДЦ к консольным редукторам соосных групп больших несущих винтов на законцовках переднего КПС, снабжен на нижнем уровне третьим выходным продольным валом, соединенным с передним V-образным в поперечной плоскости промежуточным Y-образным в плане редуктором, передающим поперечными валами крутящий момент к передней группе меньших винтов на ПГО, выполнен с возможностью при выполнении ВВП или зависания плавного перераспределения 90%5 и 10% взлетной мощности СУ соответственно на большие несущие винты ПНУС-Х2×2 и двухвинтовую ДРС-Х2 и оснащен двумя средними входными валами, связанными соединительными валами с ГТД, выполненными для отбора их взлетной мощности с задним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтами свободного хода, выдающими, отключая от трансмиссии в горизонтальном скоростном полете любой избыточный ГТД и один любой в случае его отказа или оба ГТД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет для аварийной посадки соответственно с авторотирующими или нагруженными левыми и правыми соосными несущими винтами, причем при выполнении ВВП и зависания на двухвинтовую ДРС-Х2 главным редуктором перераспределяется 10% от взлетной мощности СУ, а остальная ее мощность перераспределяется поровну на все несущие винты при удельной нагрузке на мощность СУ, равной ρN=3,77 кг/л.с. Все это позволит в гибридном тяжелом вертолете-самолете (ГТВС) также снизить уровень шума электрической СУ, выполненной по параллельно-последовательной гибридной технологии и имеющей систему электропривода, включающую электромоторы, питаемые от аккумуляторов, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим ОЭМГ и ТДД, переключающим генерирующую мощность и порядок подзарядки аккумуляторов, что обеспечит при распределенной зарядке аккумуляторной быстро перезаряжаемой батареи от совместной работы ОЭМГ и ТД Д без пиковых перегрузок минимизировать акустическую сигнатуру. Наличие этих признаков позволит при переходных маневрах повысить поперечную устойчивость и управляемость по курсу, а размещение гибридной СУ в передней части фюзеляжа обеспечит упрощение системы управления электроприводами. Это позволит также повысить безопасность полетов и использовать ТДД меньших габаритов в его поперечнике, что уменьшит как мидель фюзеляжа, так и его аэродинамическое сопротивление. Для упрощения конструкции ГТВС и уменьшения длины соединительных валов его трансмиссия выполнена в виде Y-образной в плане и с ТДД. При этом наряду двух пар больших соосных однолопастных несущих винтов, которые вращательно связанные с ОЭМГ, смонтированные в консольных редукторах на концевых частях системы КЗК, включающей переднее КПС и заднее КОС, ГТВС имеет на цельно-поворотных консолях ПГО в двухвинтовой ДНС-Х2 меньшие поворотные винты, приводимые ТДД. Применение однолопастных несущих винтов (НВ) позволит достичь более высокую аэродинамическую эффективность, несмотря на вредное сопротивление профилированного балансировочного противовеса. Для предотвращения нежелательных вибраций однолопастный НВ работает с большой окружной скоростью. Поэтому основной режим работы однолопастного НВ - это вертикальные перемещения БТВС. В случае появления косого обдува тяга винта изменяется циклически. Поэтому жесткое крепление лопасти улучшает управляемость, особенно соосных однолопастных НВ. В синхронизированных соосных однолопастных НВ моменты Мкрен и Мпрод от верхнего и нижнего однолопастных НВ при передаче на фюзеляж через КЗК взаимно уничтожаются. Поэтому коэффициент аэродинамической выгодности однолопастного НВ в симметричной двухвинтовой соосной схеме будет в 1,26-1,28 выше, чем у вертолетного двух- или трехлопастного одного НВ. Что позволит уменьшить вес планера, повысить весовую отдачу и улучшить на 39% топливную эффективность. Более того, все это позволит также в сравнении с традиционными крыльями турбовинтового самолета, имеющими предкрылки и закрылки, повысить маневренность на малых скоростях полета и при переходных маневрах, но и снизить скорость сваливания и взлетную до 63 и 75 км/ч за сет увеличения в 1,15-1,2 раза коэффициент поднятия системы КЗК, имеющей валовое переднее КПС и, особенно, совместно с цельно-поворотным ПГО в производстве подъемной силы при взлетно-посадочных режимах полета БТВС.
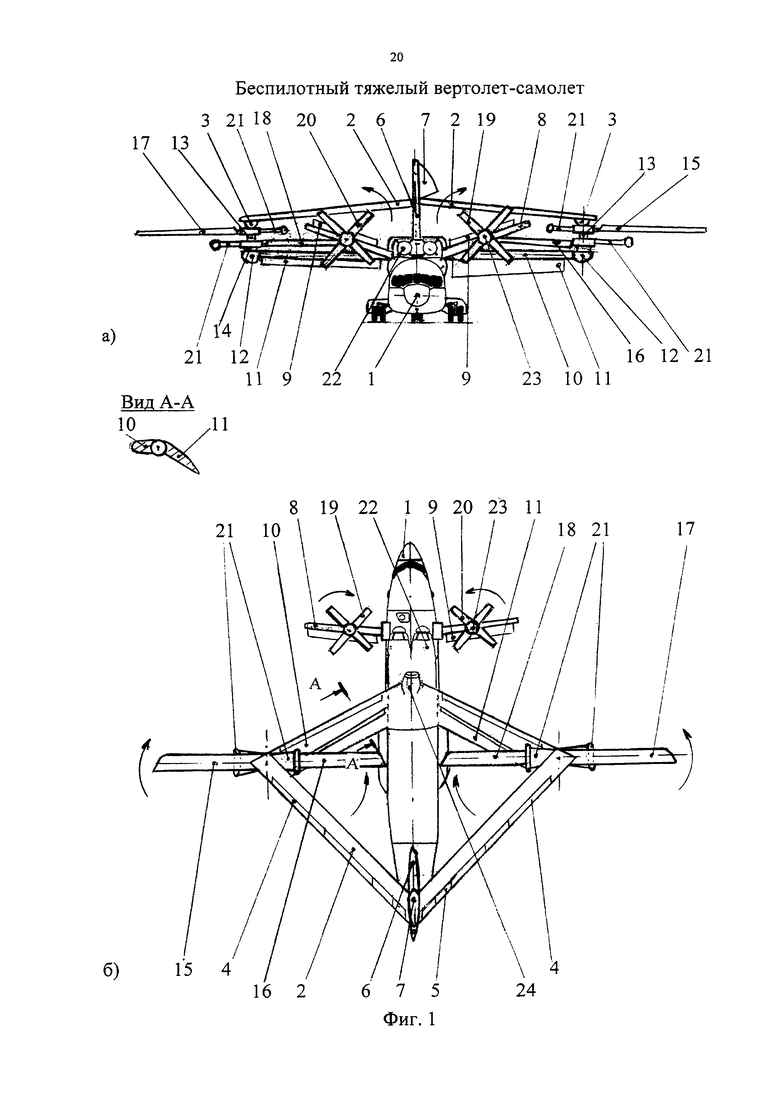
Предлагаемое изобретение предпочтительного исполнения многоцелевого БТВС с ПНУС-Х2×2 и двухвинтовой ДНС-Х2 иллюстрируется общими видами на фиг.1.
На фиг. 1 изображен турбовинтовой БТВС на общих видах спереди и сверху соответственно а) и б) с расположением двух пар однолопастных соосных НВ на законцовках крыльев в системе КЗК и с изменяемым вектором тяги двух меньших винтов на цельно-поворотных консолях V-образного ПГО при его использовании:
а) в полетной конфигурации крылатого автожира или самолета с ПНУС-Х2×2 для создания подъемной силы совместно с ПГО и системой КЗК и маршевой тягой, обеспечиваемой меньшими поворотными винтами ДНС-Х2, с условным расположением отклонения концевой части вертикального оперения, но и левой и правой цельно-поворотных секций валового переднего КПС при выполнении ВВП и КВП;
б) в полетной конфигурации вертолета шестивинтовой несущей схемы, имеющей в ПНУС-Х2×2 две пары больших однолопастных соосных НВ, размещенных на законцовкх между передним КПС и задним КОС в ромбовидной системе КЗК и на цельно-поворотных консолях V-образного ПГО в двухвинтовой ДНС-Х2.
Многоцелевой БТВС, представленный на фиг. 1, выполнен по схеме тандем-биплана с планером из композитного углепластика и концепции ПНУС-Х2×2 с двухвинтовой ДНС-Х2, имеет фюзеляж 1 и большого удлинения два крыла в системе КЗК, заднее из которой верхнее КОС 2 с подкрыльным обтекателем 3, внешними флапперонами 4 и закрылками 5 смонтировано корневыми частями по бокам стреловидного киля 6, имеющего переднюю эллиптическую кромку и руль направления 7 в виде цельно-поворотной концевой его части. Цельно-поворотное V-образное ПГО 8 с развитыми элевонами 9 на его консолях и переднее валовое КПС обратного сужения 10, имеющее развитые обратного сужения ЦПЗ 11 (см. фиг. 1а), смонтированы ниже заднего КОС 2. Переднее валовое КПС 10 имеет на законцовках нижние обтекатели 12, расположенные под верхними обтекателями 3 КОС 2, выполненные с последними каплевидной формы. Каждая пара обтекателей 3 и 12 связаны между собой верхними валами 13, установленными соосно внутри нижних валов 14 соответствующих соосных однолопастных НВ левой группы 15 и 16 правой группы 17 и 18, которые верхними их частями сцентрированы и установлены соосно с возможностью их вращения совместно с втулкой верхних НВ левого 15 и правого 17 в каждом подшипниковом узле каплевидного верхнего обтекателя 3 заднего большого удлинения КОС 2 (на фиг.1 не показана). Два меньших винта левый 17 и правый 18, выполненных флюгерно-реверсивными, установлены на соответствующих цельно-поворотных консолях V-образного ПГО 8. Во время аварийной посадки при выполнении ВВП в случае отказа двигателей БТВС его однолопастные соосные левые 15-16 и правые 17-18 НВ задней группы, а также меньшие левый 19 и правый 20 передней группы поворотных винтов работают на режиме авторотации разгружают ПГО 8 и КОС 2 и КПС 10, а во время горизонтального полета и отказа его двух двигателей - лопасти тянущих меньших поворотных 19-20 винтов флюгируются для предотвращения авторотации. При этом секции ЦПЗ 11 валового КПС 10 автоматически отклоняются на угол 40°, а при выполнении ВВП и зависания для уменьшения потерь в вертикальной тяге НВ 15-16 и 17-18 - на угол 75°. Все однолопастные соосные НВ левые 15-16 и правые 17-18 задней группы ПНУС-Х2×2 выполнены с профилированными противовесами обратного сужения 21, без автоматов перекоса и с жестким креплением их лопастей и профилированных противовесов 21, но и возможностью создания от всех НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между НВ в соосной как левой 15-16 и правой 17-18, так и верхней 15-17 и нижней 16-18 их группе, но и одинакового направления вращения в каждой паре противоположно расположенных по высоте однолопастных соосных НВ, например, при виде сверху левый верхний 15 с правым нижним 18 НВ вращаются по часовой стрелке, а правый верхний 17 с нижним левым 16 НВ вращаются против часовой стрелки (см. фиг. 16). Двухдвигательная СУ имеет с верхним расположением мотогондолы 22, смонтированные в передней части фюзеляжа 1 и снабженные, например, ГТД, выполненными для отбора их взлетной их мощности с задним выводом вала. Каждый из последних, образуя с соответствующим соединительным валом и главным редуктором 23 синхронизирующую систему, снабжен муфтой сцепления (на фиг.1 не показаны). Избыточная тяговооруженность СУ, обеспечивающая продолжение полета при одном работающем ГТД и любом промежуточном положении поворотных консолей V-образного ПГО 8 с передними меньшими винтами 19-20 в консольных гондолах 24 и вращение больших задних соосных 15-16 и 17-18 НВ во время переходного режима, что создает возможность осуществления полета или аварийной посадки и, тем самым, повышается безопасность выполнения полетов. Передача взлетной мощности от двух ГТД к передней 19-20 и задней 15-16и 17-18 группе НВ обеспечивается элементами трансмиссии, включающей: консольные редукторы больших несущих винтов, валы трансмиссии, главный редуктор 23 с продольным валом и промежуточным Y-образным в плане редуктором с поперечными валами винтов 19-20 (на фиг. 1 не показаны).
Управление многоцелевым БТВС обеспечивается общим и дифференциальным изменением шага передней 19-20 и задней 15-16 и 17-18 группы НВ и отклонением рулевых поверхностей: флапперонов 4, рулей направления 7, поворотных консолей V-образного ПГО 8 и его элевонов 9, работающих в зоне активного обдува меньших винтов 19-20. При крейсерском полете подъемная сила создается крыльями 2 и 10 в системе КЗК, ПГО 8 и зафиксированных лопастях-крыльях НВ 16-18 и 15-17, остановленных соответственно между крыльев 2-10 и за законцовками системы КЗК (см. фиг. 1а), горизонтальная тяга - меньшими винтами 19-20, на режиме висения только НВ задними однолопастными соосными левыми 15-16, правыми 17-18 и передними поворотными 19-20 на режиме перехода - крыльями 2-10 и ПГО 8 с НВ 15-16,17-18 и 19-20. При переходе к вертикальному взлету-посадке (висению) в переднем валовом КПС 10 его ЦПЗ 11 и заднем КОС его флаппероны 4 и закрылки 5 отклоняются на максимальные их углы синхронно с поворотов меньших винтов 19-20 от горизонтального положения, которые поворачиваясь вверх, устанавливают ось их вращения с наклоном наружу к плоскости симметрии (см. фиг.1а). После установки поворотных меньших винтов 19-20 в данное положение и создания подъемной тяги с задними большими однолопастными соосными 15-16 и 17-18 НВ обеспечиваются вертолетные режимы полета. При этом НВ большие 15-16, 17-18 и передние флюгерно-реверсивные меньшие винты 19-20 имеют взаимно противоположное их вращение между винтами в их каждой группе (см. фиг. 15). Поворотные консоли V-образного ПГО 8 с меньшими винтами 19-20 отклоняется от горизонтального положения вверх в вертикальное на угол +90° и на угол +45° соответственно при выполнении технологии ВВП и КВП на вертолетных и винтокрылых режимах полета БТВС при взлетно-посадочных режимах в перегрузочном варианте с максимальным взлетным его весом. При висении на вертолетных режимах полета продольное управление БТВС осуществляется изменением шага НВ задних больших 15-16, 17-18 и передних меньших 19-20, путевое управление - соответствующим дифференциальным отклонением поворотных консолей V-образного ПГО 8 с меньшими винтами 19-20. Поперечное управление обеспечивается НВ левой 15-16 и правой 16-18 группы, осуществляющими поперечную балансировку при одновременном изменении шага винтов 19-20. После вертикального взлета и набора высоты для перехода на крейсерский режим полета поворотные консоли V-образного ПГО 8 с винтами 19-20 синхронно устанавливаются в горизонтальное положение (см. фиг. 1а). После чего убирается механизация валового КПС 10, КОС 2 и затем производится скоростной полет, при котором путевое управление обеспечивается рулем направления 7 киля 6. Продольное и поперечное управление осуществляется синфазным и дифференциальным отклонением развитых элевонов 9 на консолях ПГО 8 и флапперонов 4 заднего КОС 2 соответственно.
Таким образом, БТВС с симметричной ПНУС-Х2×2, имеющей большие однолопастные соосные НВ, которые смонтированы на консольных редукторах, установленных между корпусов верхнего и нижнего обтекателей системы КЗК, и двухвинтовую ДНС-Х2 с меньшими винтами на цельно-поворотных консолях V-образного ПГО, представляет собой гибридный скоростной конвертоплан. Передние меньшие флюгерно-реверсивные винты, создающие вертикальную и соответствующим отклонением горизонтальную тягу, обеспечивают необходимые управляющие моменты и уменьшение дистанции при посадке с пробегом. Переднее валовое КПС, уменьшая длину валов в 1,224 раза меньше, чем с прямым крылом и задним размещением СУ, находится ниже заднего КОС и оба в системе КЗК с ПГО, создавая большую подъемную силу, разгружают однолопастные соосные НВ, что и позволяет наравне с высокой тяговооруженностью СУ возможность реализовать выполнение ВВП и КВП.
Однако нет никаких сомнений в том, что на пути освоения БТВС, используя вышеназванные преимущества, предстоит преодолеть еще немало трудностей и проблем. Это в первую очередь относится к решению проблем аэродинамической интерференции больших и меньших НВ и возможности обеспечения устойчивости и управляемости на режимах ВВП при совместной работе в синхронно-сбалансированной и симметричной ПНУС-Х2×2 однолопастных НВ, которые весьма перспективны в качестве останавливаемых и не убираемых в полете винтов-крыльев, что упростит наличие узлов переворота лопастей или систем их складывания и уборки НВ. Несомненно, с течением времени широкое использование в СУ ТДД позволит добиться снижения расхода топлива более чем на треть в сравнении с двухвинтовыми конвертопланами "Osprey" и Elytron 1 OS, что немаловажно для коммерческих ГТВС (см. табл. 1).
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2664024C2 |
| ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2658739C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652863C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОСКОРОСТНОЙ САМОЛЕТ-ВЕРТОЛЕТ | 2017 |
|
RU2673317C1 |
| МНОГОЦЕЛЕВОЙ ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652861C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| АЭРОМОБИЛЬ ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2017 |
|
RU2648937C1 |
| МНОГОЦЕЛЕВОЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2650258C1 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ ВЕРТОЛЕТОМ-САМОЛЕТОМ | 2017 |
|
RU2674742C1 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2658736C1 |
Изобретение относится к области авиационной техники, в частности к конструкциям беспилотных гибридных летательных аппаратов. Беспилотный тяжелый вертолет-самолет (БТВС) имеет на концах крыла несущие винты с редукторами и двигателями силовой установки (СУ), связанными соединительными валами, которые приводят во вращение пропеллеры и несущие винты, размещенные соответственно спереди гондол двигателей и над последними на пилонах крыла, содержит фюзеляж и хвостовое оперение. БТВС снабжен двумя системами с разновеликими винтами в движительно-рулевой (ДРС) и поперечно-несущей удвоенной (ПНУС) в полностью симметричной и синхронно-сбалансированной схеме. ПНУС включает на законцовках крыльев замкнутой конструкции (КЗК), имеющей при виде сверху ромбовидную конфигурацию, две пары соосных с противоположным вращением однолопастных больших винтов, обеспечивающих подъемную силу при выполнении зависания, ВВП или КВП, и двухвинтовую ДРС с тянущими меньшими винтами, смонтированными на консолях V-образного переднего горизонтального оперения (ПГО), имеющего обратную стреловидность по передней кромке и развитые элевоны. Обеспечивается уменьшение потребной мощности на продольную балансировку при висении и улучшение продольной управляемости. 2 н. и 1 з.п. ф-лы, 1 ил., 1 табл.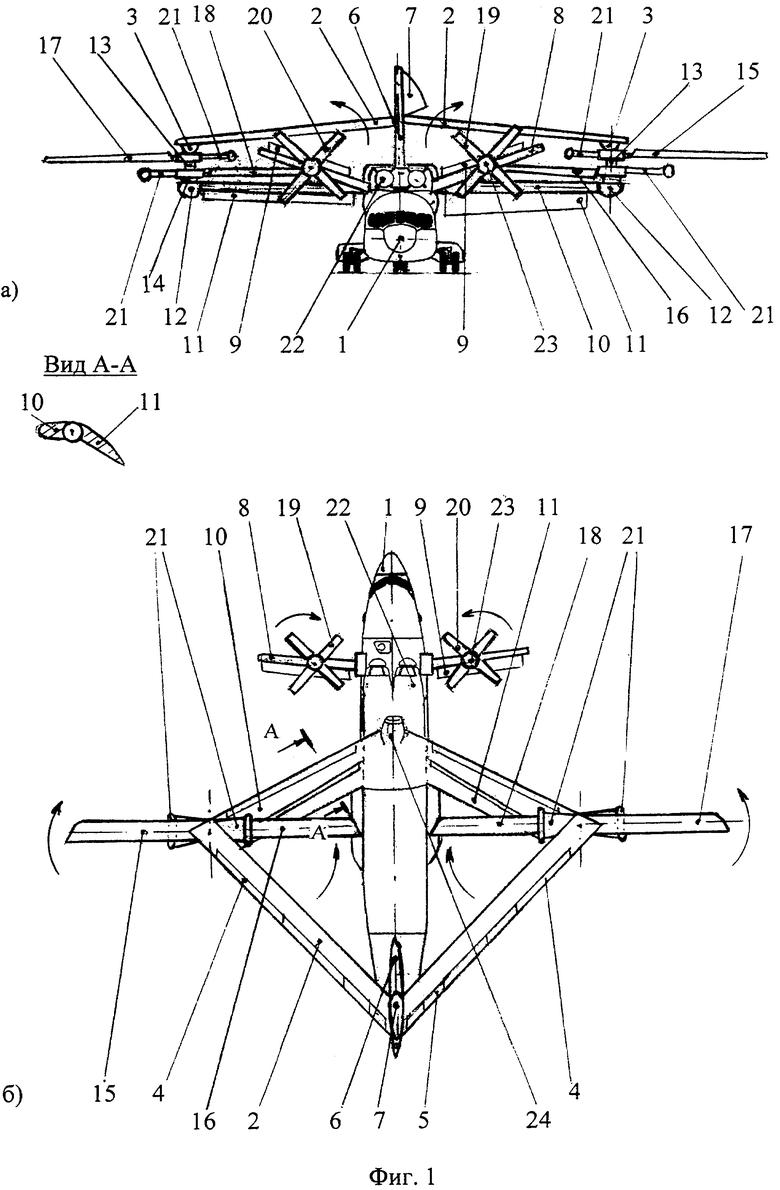
1. Беспилотный тяжелый вертолет-самолет, имеющий на концах крыла несущие винты с редукторами и двигателями силовой установки (СУ), связанными соединительными валами, которые приводят во вращение пропеллеры и несущие винты, размещенные соответственно спереди гондол двигателей и над последними на пилонах крыла, содержит фюзеляж и хвостовое оперение, отличающийся тем, что он снабжен двумя системами с разновеликими винтами в движительно-рулевой (ДРС) и поперечно-несущей удвоенной (ПНУС) в схеме ПНУС-Х2×2, включающей на законцовках крыльев замкнутой конструкции (КЗК), имеющей при виде сверху ромбовидную конфигурацию, две пары соосных с противоположным вращением двух однолопастных больших винтов, обеспечивающих подъемную силу при выполнении зависания и вертикального или короткого взлета/посадки (ВВП или КВП), и двухвинтовую ДРС-Х2 с тянущими меньшими винтами, смонтированным на консолях V-образного переднего горизонтального оперения (ПГО), имеющего обратную стреловидность по передней кромке и развитые элевоны, для скоростного полета при зафиксированных лопастях-крыльях двух верхних и двух нижних несущих винтов с профилированными противовесами обратного сужения, размещенных соответственно над передними и под задними консолями КЗК, имеющими их размах (Lкр) больше в 1,22 раза, чем два радиуса (RHB) больших несущих винтов, и образующими при виде спереди от плоскости симметрии трапециевидные коробчатые конфигурации соответственно высокорасположенным передним крылом прямой стреловидности (КПС) с положительным углом поперечного V и над ним задним крылом обратной стреловидности (КОС) с отрицательным углом поперечного V, корневые части которого смонтированы по внешним поверхностям вертикального оперения, имеющего в качестве руля направления над верхней поверхностью заднего КОС цельно-поворотную концевую его часть и обратную стреловидность по передней кромке с эллиптической соответствующей задней кромкой, но и обеспечивающими возможность преобразования полетной его конфигурации при выполнении технологии ВВП или КВП с вертолета четырехвинтовой ПНУС-Х2×2 и рулевой ДРС-Х2 соответственно или в скоростной винтокрыл с ДРС-Х2 и четырехвинтовой ПНУС-Х2×2, или в самолет с двухвинтовой ДРС-Х2 при зафиксированных лопастях-крыльях верхних и нижних несущих соосных однолопастных винтов, лопасти которых от законцовок крыльев КЗК вынесены в противоположные стороны и размещены перпендикулярно соответственно от и к плоскости симметрии, увеличивая их площадь и размах на два радиуса несущих винтов, но и обратно, при этом несущие соосные однолопастные нижние и верхние винты, закрепленные на соответствующих выходных валах консольных редукторов, каждый из которых, размещенный на законцовке переднего КПС системы КЗК в каплевидном нижнем обтекателе, имеющем продольную ось, параллельно расположенную оси симметрии, снабжен удлиненным верхним валом, выступающая из втулки верхнего несущего винта его часть сцентрирована и установлена соосно с возможностью его вращения совместно с втулкой винта в подшипниковом узле каплевидного верхнего обтекателя заднего большого удлинения КОС, оснащенного внешними флапперонами и внутренними закрылками, образуя высокорасположенный биплан КЗК с передним большого удлинения валовым КПС, обеспечивающим непосредственное управление подъемной силой и имеющим площадь, составляющую 45% от общей площади биплана, оснащено с обратным сужением цельно-поворотным закрылком (ЦПЗ), снабженным возможностью его отклонения вниз на углы 20°, 40° и 75° и преобразующим при максимальном отклонении ЦПЗ переднее КПС в крыло с консолями обратного сужения, создающими в зоне максимальных индуктивных скоростей воздушного потока от соответствующих несущих винтов возможность повышения коэффициента подъемной силы переднего КПС и несущей его способности, особенно при обдуве его консолей соосными несущими однолопастными винтами, размещенными в полностью симметричной и синхронно-сбалансированной ПНУС-Х2×2 и на поперечной оси, проходящей над центром масс, но и уменьшения при этом на 12% потерь подъемной силы от обдувки его консолей, и препятствования обратному перетеканию воздушного потока, причем ДРС-Х2 с тянущими флюгерно-реверсивными меньшими левым и правым винтами изменяемого шага, имеющими направление вращения верхних их лопастей при виде спереди от соответствующих внешних бортов фюзеляжа и выполненными с жестким креплением их лопастей и без автоматов их перекоса, при этом несущие винты, которые не взаимодействуют между левой и правой группой соосных однолопастных винтов, выполненных без управления циклического изменения их шага и с жестким креплением их лопастей и профилированных противовесов, имеют, создавая от всех несущих винтов полную компенсацию реактивных крутящих моментов, противоположное направление вращения между винтами в каждой как левой и правой, так и верхней и нижней их группе, но и одинакового направления вращения в каждой паре противоположно расположенных по высоте несущих винтов, например, при виде сверху левый верхний винт с правым нижним винтом вращаются по часовой стрелке, а правый верхний винт с нижним левым винтом вращаются против часовой стрелки, причем уменьшая аэродинамическую интерференцию несущих винтов ПНУС-Х2×2 с меньшими винтами ДРС-Х2, вынесенными от грузопассажирского отсека и смонтированными на консолях V-образного ПГО таким образом, что при создании меньшими винтами горизонтальной тяги линия действия пропульсивной их силы размещена при виде спереди между плоскостями вращения верхнего и нижнего соосных несущих винтов, имеющих вращение при виде сверху, при котором наступающая лопасть нижних левого и правого винтов проходили бы над соответствующим бортом фюзеляжа от кормовой к носовой его части, при этом система трансмиссии, включающая на законцовках переднего КПС консольные редукторы соосных групп больших несущих винтов, приводимые соответственно двумя левыми и двумя правыми обратимыми электромоторами-генераторами (ОЭМГ) или двумя нижними обратной V-образности в плане выходными валами синхронизирующего многоуровневого главного редуктора, имеющего в направлении полета для передачи крутящего момента, например, от газотурбинных или турбодизельных двигателей (ГТД или ТДД), снабженного на нижнем уровне третьим выходным продольным валом, соединенным с передним V-образным в поперечной плоскости промежуточным Y-образным в плане редуктором, передающим поперечными валами крутящий момент к передней группе меньших винтов на ПГО, выполнен с возможностью при выполнении ВВП или зависания плавного перераспределения 90% и 10% взлетной мощности СУ от ОЭМГ с ТДД или от ТДД соответственно на большие несущие винты ПНУС-Х2×2 и двухвинтовую ДРС-Х2 и оснащен двумя средними входными валами, связанными соединительными валами с ТДД, выполненными для отбора их взлетной мощности с задним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтами свободного хода, выдающими, отключая от трансмиссии в горизонтальном скоростном полете любой избыточный ТДД и один любой в случае его отказа или оба ТДД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет для аварийной посадки соответственно с авторотирующими или нагруженными левыми и правыми соосными несущими винтами, причем при выполнении ВВП и зависания на двухвинтовую ДРС-Х2 главным редуктором перераспределяется 10% от взлетной мощности СУ, а остальная ее мощность перераспределяется поровну на все соосные несущие винты при удельной нагрузке на мощность СУ, равной ρN=3,77 кг/л.с., при этом в электрической СУ ОЭМГ, имеющие два способа их работы - потреблять электрическую мощность от накопителей и вырабатывать ее для восполнения последних, обеспечивают соответственно при работе всех ОЭМГ в режиме электромоторов как передачу пиковой их мощности на соосные несущие винты для создания подъемной силы при выполнении ВВП или зависания, так и возможность в полетной конфигурации крылатого автожира при авторотации соосных несущих винтов осуществления подзарядки быстро заряжаемых накопителей при работе всех ОЭМГ в режиме ветрогенераторов, причем электрическая СУ выполнена по параллельно-последовательной гибридной технологии с системой электропривода, включающей ОЭМГ, вращательно связанные с соответствующими соосными несущими винтами, накопители - аккумуляторные быстро перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим ОЭМГ и ТДД, переключающим генерирующую мощность и порядок подзарядки аккумуляторов, и снабженной возможностью реализации двух способов работы с внутренним источником энергии - ТДД с генератором, установленными в двигательном отсеке фюзеляжа перед центром масс, при этом в электрической СУ ТДД, вращательно связаны с входными валами главного редуктора через коробку передач, которая передает взлетную их мощность на режимах ВВП и зависания только на меньшие винты ДРС-Х2 или перераспределяет крутящий момент как на главный редуктор, имеющий поперечные валы трансмиссии, проложенные во внутренних секциях ПГО к редукторам меньших винтов, так и генератор, предназначенный для выработки наравне с ОЭМГ-ветрогенераторами совместной генерирующей электрической мощности при требуемой быстрой подзарядке аккумуляторов с обеспечением необходимых крейсерских режимов его полета в конфигурации крылатого автожира.
2. Беспилотный тяжелый вертолет-самолет (БТВС) по п. 1, отличающийся тем, что упомянутое ПГО выполнено с цельно-поворотными его консолями, изменяющими вектор тяги двухвинтовой движительно-несущей системы (ДНС), при этом передние поворотные винты ДНС-Х2 и упомянутые соосные несущие винты задней группы размещены соответственно в направлении полета спереди и сзади от центра масс и имеют соответственно при выполнении ВВП и зависания большее и меньшее расстояния от вертикальных их осей вращения до центра масс, но и возможность преобразования его полетной конфигурации с вертолета шестивинтовой несущей схемы, включающей два поворотных винта ДНС-Х2 и четыре упомянутых соосных несущих винта, в самолет с двухвинтовой ДНС-Х2 при зафиксированных соответствующим образом всех лопастях-крыльях упомянутых соосных несущих винтов, причем каждая из цельно-поворотных консолей упомянутого ПГО, имеющего раздельные узлы их поворота, создает возможность в вертикальной продольной плоскости синхронного их синфазного и дифференциального отклонения с меньшими винтами, имеющими как вращения без взаимного влияния и их перекрытия с соосными несущими винтами, так и наклонное к плоскости симметрии расположение на консолях ПГО, отклоняющее вовнутрь ось вращения каждого меньшего винта, улучшающего маневренность, продольную и путевую управляемость, при этом упомянутое вертикальное оперение, имеющее прямую стреловидность по задней его кромке и эллиптическую соответствующую переднюю кромку, содержит соответствующие кромки в цельно-поворотной концевой его части.
3. Способ применения БТВС при корабельном его базировании, заключающийся в том, что упомянутые левая и правая пара соосных несущих винтов снабжены в стояночной конфигурации возможностью после их остановки фиксированного размещения и установки их лопастей параллельно оси симметрии, при этом упомянутая гибридная его электрическая СУ, питаемая от внутреннего или внешнего источника энергии, обеспечивает два способа его функционирования соответственно в конфигурации привязного (для энергозатратного вертикального взлета) или в конфигурации автономного (для горизонтального крейсерского полета) беспилотного тяжелого вертолета-самолета (БТВС), связанного посредством автоматического узла стыковки/расстыковки отрывного его разъема через электроразъем бронированного кабеля со стартово-приемной платформой (СПП), устанавливаемой на транспортном средстве - авианесущем корабле, обеспечивающем его размещение, транспортирование и функционирование при его соответствующем передвижении в транспортно-походной конфигурации на СПП, имеющей электроустановку, работающую от вала отбора мощности двигателя транспортного средства, и/или встроенный дизельный электроагрегат со средствами накопления и подвода электроэнергии гибким кабелем, размотка/намотка которого при вертикальном стартовом взлете обеспечивается барабаном со следящим электроприводом, установленным в энергетическом отсеке СПП, причем после раскладывания концевых частей крыла в полетную конфигурацию, вертикального взлета и при наборе БТВС стартовой высоты в 50 метров обеспечивается отлет его вбок от СПП с последующим его барражирующим круговым облетом СПП, но и зависанием с последующим переключением электропитания на внутренний его источник при срабатывании средств его целеуказания, происходит расстыковка и вылет БТВС с отделением от его фюзеляжа гибкого кабеля посредством автоматического узла расстыковки, который имеет пиротолкатель, выбрасывающий парашют для его управляемого спуска на поверхность земли с соответствующей автоматической подмоткой кабеля на барабан СПП.
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
| КОМБИНИРОВАННЫЙ ВЕРТОЛЕТ | 1994 |
|
RU2089456C1 |
| СКОРОСТНОЙ ВИНТОКРЫЛ | 2012 |
|
RU2507121C1 |
| US 7665688 B2, 23.02.2010 | |||
| СИСТЕМА И СПОСОБ ПОЛУЧЕНИЯ ЭЛЕКТРОЛИТА ВЫСОКОЙ ЧИСТОТЫ ДЛЯ ВАНАДИЕВОГО АККУМУЛЯТОРА | 2017 |
|
RU2690012C1 |

