Изобретение относится к области авиации, конкретно - к комбинированным летательным аппаратам со свойствами самолета и вертолета (винтокрылам, конвертолетам), в частности к истребителям-бомбардировщикам, истребителям и штурмовикам с вертикальным взлетом и посадкой.
Существуют отдельно как самолеты, так и вертолеты.
Современные сверхзвуковые и гиперзвуковые военные самолеты оснащают крыльями симметрично или асимметрично изменяемой стреловидности, вплоть до обеспечения возможности изменения стреловидности с обратной на прямую при переходе на верхний скоростной диапазон (сверхзвуковой) крейсерского полета.
В комплексе имеющих еще место недостатков аэродинамических схем с крыльями изменяемой стреловидности в данном случае следует отметить относительную техническую сложность с повышенными массогабаритными показателями, что для летательных аппаратов особенно «болезненно».
Известны также самолеты палубного базирования с вертикальным взлетом и посадкой за счет вертикального направления вектора тяги реактивного двигателя «самолетного типа», например, Як-141 и др. [RU 96101027 А, В64С 27/22, 10.04.1998]. Однако кратковременные режимы взлета-посадки таким способом весьма неэкономичны по расходу топлива.
У вертолета же такие режимы - «специализированные», вплоть до длительного зависания в воздухе, гораздо более экономичные. Но функциональное назначение винта (ротора) вертолета ограничено традиционными функциями, собственно и обусловившими определение «вертолетный» в последующей вполне закономерной в ходе технической эволюции «селекции» самолетов с вертолетами, - рождении комбинированных летательных аппаратов [Х-самолеты: полвека передовых достижений //Интернет-ресурс: http://nnm.ru/blogs/BolsoyU/h-samolety_polveka_peredovyh_dostizheniy/;
Бауэре П. Летательные аппараты нетрадиционных схем: Пер. с англ. - М.: Мир, 1991. - 320 с., ил.].
Так, характерен винтокрыл, содержащий достаточно развитые самолетные крылья (нулевой стреловидности, т.е. перпендикулярные продольной оси фюзеляжа) и ротор с несущим винтом, лопасти которого выполнены с продольно-выдвигающимися удлинителями, причем с возможностью фиксации (стопорения) ротора в положении лопастей над упомянутыми крыльями и превращением, таким образом, в дополнительное крыло нулевой стреловидности [RU 2380276, В64С 3/42, В64С 27/22, 27.01.2010].
С позиций заявляемого изобретения следует отметить наличие здесь общего недостатка большинства летательных аппаратов с неуправляемой геометрией крыла, в данном случае - только с «нулевой» стреловидностью как в отношении к самолетным крыльям, так и к комбинации «самолетные крылья плюс несущий винт в качестве дополнительного крыла».
Аналогичную оценку можно дать также конструктивно и функционально близкому экспериментальному винтокрылу фирмы «Локхид» (США) с фиксируемым X-образно (к продольной оси фюзеляжа) четырехлопастным несущим винтом-клылом [Самолет преобразуемый // Интернет-ресурс: http://www.http://www.krugosvet.ru/uploads/enc=http://www.krugosvet.ru/enc/nauka_i_tehnika/tehnologiya_i_promyshlennost/SAMOLET_PREOBRAZUEMI.html&usg. - С.141-142, рис.6.32].
Указанный недостаток частично устранен техническим решением беспилотного конвертовинтокрыла с двумя продольно разнесенными несущими винтами и также продольно разнесенными вдоль фюзеляжа парными крыльями самолетного типа, с симметрично изменяемой (управляемой) стреловидностью в диапазоне с обратной до прямой включительно [RU 2432300, В64С 37/00, В64С 27/22, 27.10/2011].
Но и в такой, безусловно прогрессивной, конструкции задача оптимизации конструкции высокоскоростных аппаратов решена, как уже выше оговорено, лишь частично: идея симметрично-управляемой стреловидности реализована «традиционно» для самолетов - только для самолетных крыльев
Достаточно близким аналогом заявляемого изобретения, могущим послужить примером проектной схемно-конструкторской проработки, можно считать винтокрыл (преобразуемый вертолет «Ведан»), содержащий фюзеляж и комбинированный воздушный движитель, включающий в себя движитель самолетного типа с продольным вектором тяги, преимущественно для горизонтального полета, и винтовой движитель вертолетного типа и поперечным вектором тяги, преимущественно для вертикального полета, в виде ротора, по меньшей мере, с одним несущим винтом с тремя установленными на радиальных вилках поворотными крылообразующими лопастями (лопастями-крыльями) с профилем для получения аэродинамической подъемной силы на них как при вращении ротора от энергосиловой установки с управляемой муфтой сцепления, по крайней мере, в приводе ротора, в вертолетном режиме полета, так и при обдуве встречным продольным потоком воздуха от энергосиловой установки движителя самолетного типа в самолетном режиме полета, устройство управления шагом несущего винта и преобразования последнего в статическую стреловидную совокупность крылообразующих лопастей (лопастей-крыльев) в симметричном ее положении с ориентацией одной из вилок (а значит и лопасти) вдоль продольной вертикальной плоскости фюзеляжа [RU 2081032 С1, В64С 27/22, 10.06.1997].
В нем каждая крылообразующая лопасть (лопасть-крыло) несущего винта выполнена в плане в виде самолетных стреловидных V-образных крыльев и установлена на конце «своей» вилки с возможностью свободного поворота на подшипнике с вертикальной осью, проходящей через центр лопасти-крыла. При этом сами вилки не имеют крыловидности и служат исключительно для обеспечения определенности положения лопастей-крыльев в пространстве и принудительного изменения (в процессе управления) шага лопастей (угла атаки).
Вилки кинематически соединены с устройством управления шагом несущего винта (шагом лопастей). Втулки несущего винта соединены приводом (редуктором с обгонной муфтой) с энергосиловой установкой (двигателем). Кинематические цепи привода нижнего и верхнего несущих винтов выполнены раздельными и имеют управляемые муфты сцепления. В носовой и хвостовой частях фюзеляжа тандемно установлены переднее и заднее крылья самолетного типа, причем переднее крыло выполнено с виде отдельных консолей, установленных на горизонтальной оси с возможностью раздельного и дифференциального управления углами установки консолей, а заднее крыло укреплено на фюзеляже неподвижно и на концах оснащено соплами системы газодинамического управления, каналы которой соединены с соплом энергосиловой установки (двигателя). В хвостовой части фюзеляжа установлен киль с рулем. Лопасти ротора и самолетные крылья имеют преимущественно несимметричный двояковыпуклый крыловой профиль поперечного сечения. Энергосиловая установка (двигатель) выполнена с регулируемым соотношением отбора механической мощности и мощности реактивной тяги.
Устройство преобразования несущего винта в статическую стреловидную совокупность крылообразующих лопастей выполнено с возможностью естественного (сопротивлением воздушной среды) торможения и пассивной (также сопротивлением воздушной среды) фиксации отключенного управляемой фрикционной муфтой от энергосиловой установки, флюгирующего под действием лобового воздушного потока, несущего винта в условно неподвижном положении относительно фюзеляжа с ориентацией одной из вилок примерно вдоль продольной оси (в более общем случае - вертикальной плоскости) фюзеляжа исключительно вперед (по направлению полета), вследствие указанного флюгирования. С образованием при этом крылообразующими лопастями «покрыльно» и в совокупности как составного крыла, исключительно прямой V-образной стреловидности, причем неуправляемой (угол стреловидности неизменен как по модулю, так и по знаку.
Указанным патентом RU 2081032 защищен и способ преобразования вертолета в самолет, заключающийся в остановке несущего винта в полете и последующем размещении его лопастей относительно набегающего потока с возможностью образования на аэродинамических поверхностях лопастей подъемной силы крыла самолета и характеризующийся тем, что для вертолета с двумя несущими соосными винтами производят последовательную остановку винтов, а симметричное расположение их лопастей относительно набегающего потока обеспечивают автоматическим воздействием набегающего потока на каждую лопасть в режиме ее флюгирования с одновременным поворотом лопасти вокруг своей центральной оси в горизонтальной плоскости.
Однако такое устройство, направленное на осуществление способа по предыдущему абзацу, при всех его преимуществах, главным образом которых, под углом зрения идеи заявляемого изобретения, является совмещение в одном устройстве функций вертолетного винта (ротора) и V-образного неподвижного составного (совокупность трех лопастей-крыльев) винта-крыла для создания подъемной силы в самолетном режиме полета, оставляет резервы повышение тактико-технических характеристик и возможностей как летательного аппарата. Ибо неизменяемая в самолетном режиме прямая V-стреловидность винта-крыла существенно уступает по конструкции аппаратам и с симметрично, и с асимметрично изменяемой стреловидностью самолетных крыльев, где возможность альтернативного выбора «прямая или обратная стреловидность» - уже оптимизация (хотя и не полная).
В тексте описания работы устройства-аналога (третий абзац вверх от формулы изобретения в указанном выше источнике информации) имеется оговорка о наличии явления «обратной» стреловидности: «При снижении средней линейной скорости лопасти до величины, меньшей горизонтальной скорости полета, эта лопасть неустойчиво взаимодействием с потоком (явление "обратной" стреловидности) и, флюгируя, поворачивается из неустойчивого положения в противоположное устойчивое положение с прямой стреловидностью по отношению к набегающему потоку, приобретая свойства крыла самолета».
Однако такой режим является вынужденным переходным и кратковременным, причем между двумя последовательными этапами полета с прямой стреловидностью, неустойчивым с позиций аэродинамики устройства в целом и потому, видимо, названный автором данного аналога «обратной» стреловидностью в кавычках.
В качестве недостатка данного аналога можно попутно отметить и неиспользование (во всяком случае, не обнаружено сведений о противном) асимметричного поворота крыла-винта (т.е. с произвольным углом наклона вилок ротора) с целью компенсирующих, стабилизирующих аэродинамических эффектов в ряде полетных режимов, связанных с маневрированием или боевым повреждением аппарата.
Приведенная здесь критика относится, разумеется, к известным способу и устройству для его реализации одновременно. Более того, эта критика не умаляет достоинств устройства-аналога как предназначенного для определенного узкого класса винтокрылов, в частности относительно не высокоскоростных.
Наиболее близким к заявляемому изобретению по назначению и совокупности конструктивных признаков (прототипом) является конвертолет, содержащий фюзеляж и комбинированный воздушный движитель, включающий в себя движитель самолетного типа с продольным вектором тяги, преимущественно для горизонтального полета, и винтовой движитель вертолетного типа и поперечным вектором тяги, преимущественно для вертикального полета, в виде ротора, по меньшей мере, с одним несущим винтом с тремя крылообразующими лопастями с профилем для получения аэродинамической подъемной силы на них как при вращении ротора от энергосиловой установки с управляемой муфтой сцепления, по крайней мере, в приводе ротора, в вертолетном режиме полета, так и при обдуве встречным продольным потоком воздуха от энергосиловой установки движителя самолетного типа в самолетном режиме полета, устройство преобразования несущего винта в статическую стреловидную совокупность (СССКЛ) крылообразующих лопастей в различном ее угловом положении с ориентацией одной из лопастей вдоль продольной вертикальной плоскости фюзеляжа выборочно либо назад, либо вперед, с образованием при этом крылообразующими лопастями, соответственно, симметричной обратной или прямой Y-образной стреловидности [RU 2369525 С2, 10.10.2009, D64C 27/22].
В этом устройстве предусмотрена возможность оперативного изменения обратной Y-стреловидности на прямую Y-стреловидность крылообразующих лопастей при переходе с дозвуковой на сверхзвуковую скорость полета в самолетном режиме. Хотя предметом изобретения объекта-аналога является сопутствующее техническое решение.
У конвертолета-прототипа, однако, остались недостатки, побуждающие их устранить.
Так, в нем не предусмотрена возможность оперативного (в полете) преобразования несущего винта в СССКЛ, во-первых, с Х-образным расположением лопастей (обеспечивающим «нулевую» стреловидность) и, во-вторых, с асимметричной Y-образной стреловидностью с любым азимутальным отклонением от продольной вертикальной плоскости фюзеляжа (задаваемым по условиям маневра в конкретных условиях эксплуатации) в диапазоне от 0 до 360°. Это дает основания констатировать недостаточное совершенство устройства летательного аппарата такого типа (при известных его положительных качествах).
Задачей, на решение которой направлено заявляемое изобретение, является повышение тактико-технических характеристик и возможностей устройства как летательного аппарата - самолета с возможностью вертикальных взлета, посадки и зависания, за счет расширения функций и возможностей винта вертолетного типа, а именно - дополнительного придания ему двух функций, названных в предыдущем абзаце, а именно - не только крыла с прямой и обратной Y-образной стреловидностью для создания аэродинамической подъемной силы при продольном перемещении, в самолетном режиме при работающих турбореактивном или реактивном движителях с продольной тягой в широком (до- и сверхзвуковом диапазоне скоростей полета), но и обеспечения возможности оперативно изменять геометрию такого крыла - его стреловидность на «нулевую» (Х-образную). Или в асимметричную Y-образную в зависимости от скорости полета и совершаемого маневра в конкретных условиях эксплуатации, обеспечив тем самым возможность стабилизировать аппарат в полете путем асимметричного изменения геометрии крыла-винта (крыла-ротора). Причем без существенного ухудшения массогабаритных, весовых и экономических показателей.
Технический результат в соответствии с поставленной задачей достигается за счет того, что в винтокрыле, содержащем фюзеляж и комбинированный воздушный движитель, включающий в себя движитель самолетного типа с продольным вектором тяги, преимущественно для горизонтального полета, и винтовой движитель вертолетного типа и поперечным вектором тяги, преимущественно для вертикального полета, в виде ротора, по меньшей мере, с одним несущим винтом с тремя крылообразующими лопастями с профилем для получения аэродинамической подъемной силы на них как при вращении ротора от энергосиловой установки с управляемой муфтой сцепления, по крайней мере, в приводе ротора, в вертолетном режиме полета, так и при обдуве встречным продольным потоком воздуха от энергосиловой установки движителя самолетного типа в самолетном режиме полета, устройство преобразования несущего винта в статическую стреловидную совокупность крылообразующих лопастей в различном ее угловом положении с ориентацией одной из лопастей вдоль продольной вертикальной плоскости фюзеляжа выборочно либо назад, либо вперед, с образованием при этом крылообразующими лопастями, соответственно, симметричной обратной или прямой Y-образной стреловидности, устройство преобразования несущего винта в статическую стреловидную совокупность крылообразующих лопастей выполнено с дополнительной возможностью торможения и фиксации несущего винта в неподвижном положении относительно фюзеляжа с расположением лопастей выборочно под любым другим углом по азимуту к продольной вертикальной плоскости фюзеляжа в диапазоне от 0 до 360°, с образованием крылообразующими лопастями асимметричной Y-образной стреловидности соответствующей угловой величины.
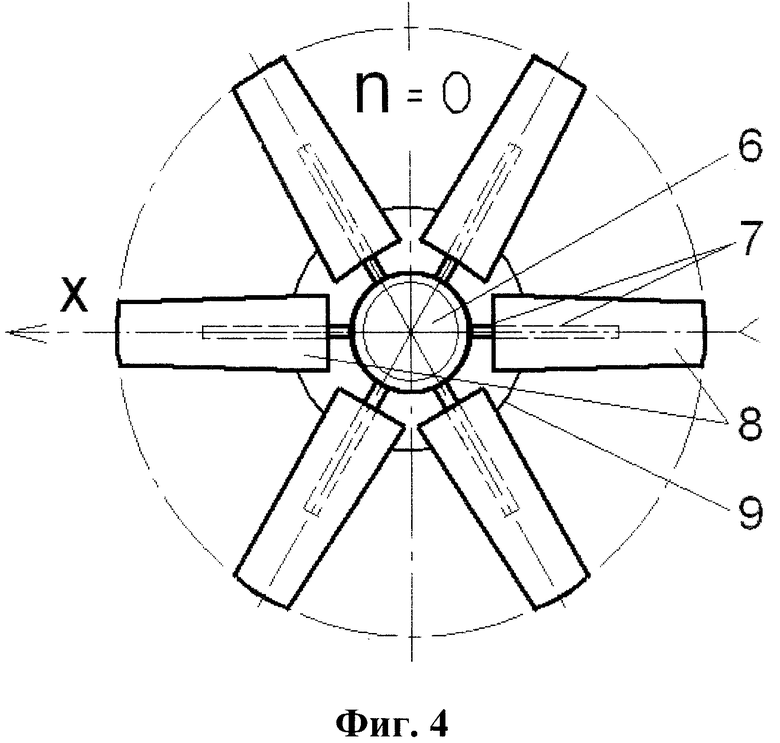
Технический результат достигается также за счет дополнительных конструктивных признаков (при сформулированной выше основной совокупности признаков): винтокрыл может содержать два соосных трехлопастных несущих винта по схеме сдвоенного несущего винта разнонаправленного вращения в вертолетном режиме, а устройство преобразования несущего винта в статическую стреловидную совокупность крылообразующих лопастей может быть выполнено с дополнительной возможностью торможения и фиксации обоих Y-образных винтов в неподвижном положении относительно фюзеляжа с расположением лопастей в положениях, выборочно, как с одинаковой, так и различной Y-стреловидностью, причем в последнем случае - с взаимным угловым смещением по азимуту на 180°, с образованием Х-образной схемы сдвоенного винта как совокупности двух соосных винтов.
Среди известных устройств и способов не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной совокупностью. В то же время, именно за счет последней достигается новый технический результат.
Более подробно сущность изобретения раскрывается в приведенном ниже примере реализации и иллюстрируется чертежами, на которых представлено:
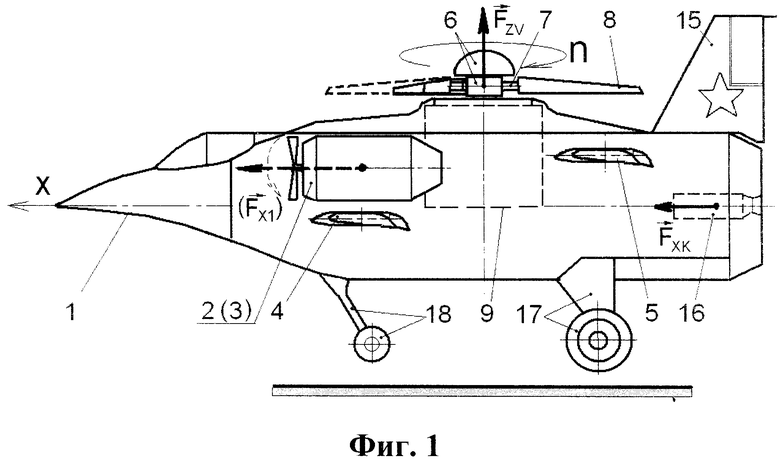
на фиг. 1 - винтокрыл с одним несущим винтом в режиме вертикального взлета или посадки, вид сбоку, где Fzv - поперечный вектор тяги (тяга несущего винта); Fхк - продольный компенсирующий вектор тяги; n - угловая скорость ротора несущего винта;
на фиг 2 - винтокрыл в режиме горизонтального полета (самолетный низкоскоростной режим), вид в плане на неподвижный винт-крыло в положении «крыло обратной стреловидности», где α - угол стреловидности винта-крыла; Fx1, Fx2 - продольные силы тяги основных самолетных двигателей, Fzк1, Fzк2 - аэродинамические подъемные силы на передней и заднее парах самолетных крыльев; Fp - аэродинамическая подъемная сила винта-крыла (остальные обозначения соответствуют фиг 1);
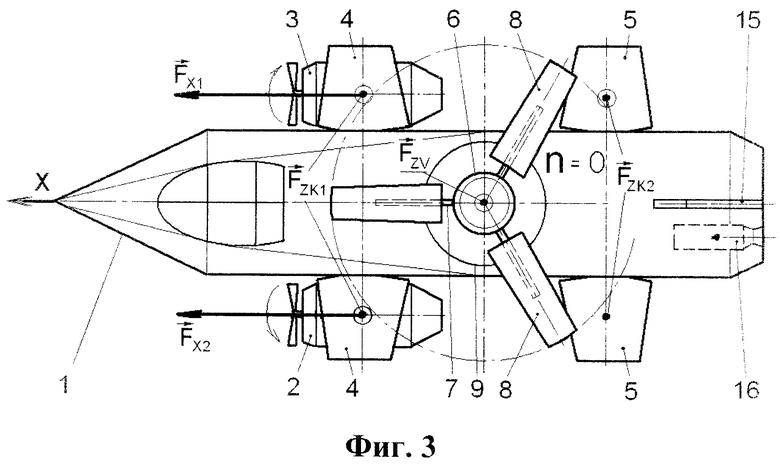
на фиг 3 - винтокрыл в режиме горизонтального полета (самолетный высокоскоростной режим), вид в плане на неподвижный винт-крыло в положении «крыло прямой стреловидности» (обозначения соответствуют фиг. 1 и 2);
на фиг. 4 - схема расположения лопастей двух заторможенных соосных несущих винтов в Х-образной конфигурации, вид в плане;
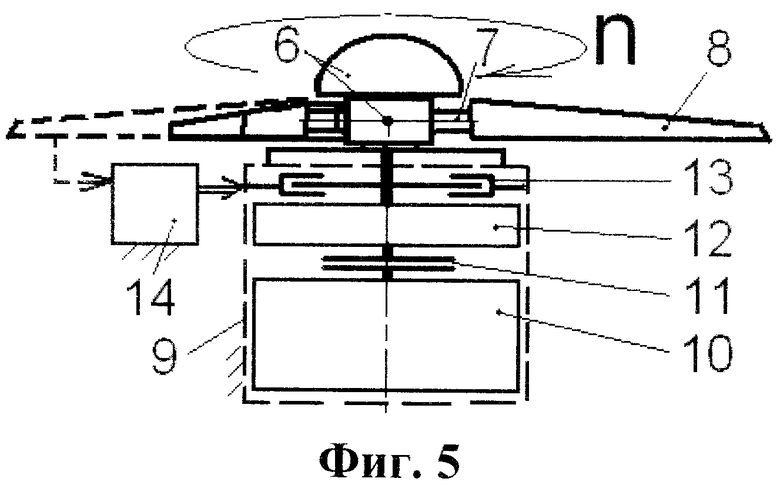
на фиг. 5 - упрощенная блок-схема устройства преобразования несущего винта в статическую стреловидную совокупность крылообразующих лопастей с выделением дополнительных элементов устройства - тормоза винта с выставкой азимутов его ориентации в фиксируемых положениях;
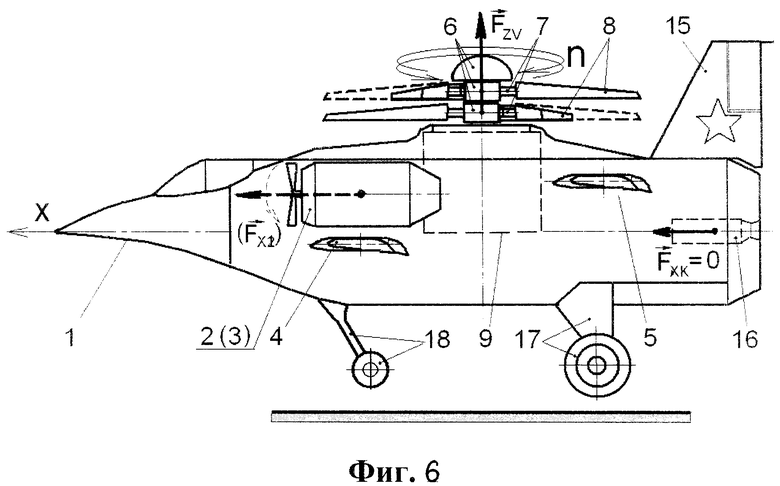
на фиг 6 - винтокрыл с двумя соосными несущими винтами (сдвоенным винтом) в режиме вертикального взлета или посадки, вид сбоку (обозначения соответствуют фиг. 1).
При этом иллюстрации носят упрощенный (разумно-достаточный для понимания сущности заявляемого изобретения) характер в отношении геометрических форм и размеров частей устройства, которые не принципиальны с точки зрения предмета заявляемого изобретения (фюзеляж, место размещения самолетных крыльев, самолетные двигатели и т.д.).
Заявляемый винтокрыл содержит фюзеляж 1, на котором установлен комбинированный воздушный движитель, включающий в себя движитель самолетного типа с продольным вектором тяги (Fx1+Fx2), преимущественно для горизонтального полета. В данном примере показаны турбореактивные двигатели 2, 3, установленные впереди носовой и кормовой пар коротких самолетных (самолетного типа) крыльев - 4 и 5 соответственно. Крылья 4 и 5 предназначены как для создания подъемной силы Fzк1+Fzк2 в горизонтальном полете, так и для подвешивания вооружения (на иллюстрациях не показано, как момент не существенный для изложения сущности заявляемого изобретения). Крылья 4, 5 могут быть конструктивно оформлены аналогично винтокрылу-аналогу RU 2081032 - с управляемой V-стреловидностью, как обратной, так и прямой, либо для одной, либо для обеих пар. Возможен «облегченный» вариант с одной парой (4), смещенной ближе к центру тяжести винтокрыла.
В верхней части фюзеляжа 1 горизонтально установлен винтовой движитель вертолетного типа и поперечным вектором тяги Fzv, преимущественно для вертикального полета, в виде ротора 6, с одним (как в данном примере по фиг. 1-5) или двумя (см. фиг. 6) или в большем количестве согласно известным или будущим новым схемам) несущим винтом. Несущий винт выполнен с тремя одинаковыми, установленными на одинаковых радиальных вилках 7 поворотными (вокруг продольных осей вилок 7) крылообразующими лопастями 8 (лопастями-крыльями как двухфункциональными устройствами) с профилем для получения аэродинамической подъемной силы на них как при вращении ротора 6 (сила Fzv,) в вертолетном режиме полета, так и при обдуве встречным продольным потоком воздуха от энергосиловой установки 2, 3 движителя самолетного типа в самолетном режиме полета (Fp). Винт в плане симметричен: угловое расстояние между вилками 7 составляет 120°.
Ротор 6 кинематически связан с энергосиловой установкой 9 (поршневым или газотурбинным двигателем с дополнительным, обычным для энергосиловых установок оборудованием), в состав которой входят двигатель 10 с приводом (трансмиссией) ротора 6 (см. фиг. 5). В привод входят, как минимум, управляемая муфта сцепления 11, редуктор 12 и устройство торможения и фиксации ротора 6 в неподвижном положении (при недостаточности сил сопротивления воздуха, смазки и трения - см. далее).
Здесь же установлено устройство управления шагом несущего винта и преобразования последнего (при фиксации в заторможенном состоянии) в статическую стреловидную совокупность крылообразующих лопастей 8 в симметричном ее положении с ориентацией одной из вилок 7 вдоль продольной оси фюзеляжа 1 (управление полетом по вертикали регулированием величины силы Fzv в вертолетном режиме и силы Fp в самолетном режиме полета, - конструкция обычная для вертолетов и винтокрылов: привод от органов управления из кабины летчиком к поворотным лопастям с возможностью синхронного поворота последних.
Устройство управления шагом несущего винта - второстепенный с точки зрения идей заявляемого изобретения, но полезный для приведенного примера винтокрыла конструктив.
Устройство преобразования несущего винта в статическую стреловидную совокупность крылообразующих лопастей (СССКЛ) 8, в данном примере выполнения винтокрыла, содержит как минимум один тормоз 13 с системой 14 управления им с выставкой азимутов ориентации винта (см. фиг. 5), с возможностью торможения и активной фиксации ротора 6 в неподвижном положении относительно фюзеляжа 1 с ориентацией одной из вилок 7, по меньшей мере вдоль продольной вертикальной плоскости фюзеляжа 1 выборочно либо вперед (над кабиной, по движению винтокрыла носом вперед), либо назад (в сторону хвоста), с образованием при этом крылообразующими лопастями 8, соответственно, прямой или обратной Y-образной стреловидности, причем при выключенной муфте сцепления в приводе ротора 6.
Таким образом, указанное устройство выполнено с возможностью торможения и активной фиксации несущего винта в неподвижном положении относительно фюзеляжа 1 с расположением одной из вилок 7, по меньшей мере вдоль продольной вертикальной плоскости фюзеляжа 1 выборочно либо вперед, либо назад, с образованием при этом крылообразующими лопастями (лопастями-крыльями), соответственно, прямой или обратной Y-образной стреловидности (разумеется, при полете винтокрыла носом вперед).
Как более рациональный функционально, но более сложный и более дорогой вариант (здесь сразу предлагается расширение возможностей), устройство преобразования несущего винта в статическую стреловидную совокупность крылообразующих лопастей 8 может (и рекомендуется) быть выполнено с возможностью торможения и активной фиксации несущего винта в неподвижном положении относительно фюзеляжа 1 с ориентацией одной из вилок 7 выборочно под любым углом по азимуту к продольной вертикальной плоскости фюзеляжа в диапазоне от 0 до 360° (т.е. упомянутые 0, 360° и 180° и любой другой в этом диапазоне), с образованием крылообразующими лопастями 8 асимметричной стреловидности соответствующей угловой величины (на иллюстрациях не показано ввиду ясности словесного описания).
Не исключен вариант с дополнительным или одним специализированным приводом, содержащим тормоз 13, управляемый от системы управления 14 (аналогично предыдущему варианту).
При выполнении несущего винта сдвоенным (см. фиг. 6, аналогично устройству-прототипу), с возможностью вращения в разные стороны, в нем предусмотрена возможность выборочной установки обоих винтов в положение как с одинаковой, так и различной Y-стреловидностью, в последнем случае - с взаимным угловым смещением по азимуту на 180° (см. фиг. 4).
Как правило, винтокрыл должен иметь хвостовое оперение 15 с рулевым устройством и/или компенсатором реактивного момента на фюзеляже 1 от вращающегося несущего винта. В качестве такого компенсатора может быть применен, в частности, хвостовой компенсирующий реактивный двигатель 16 со смещенным и, предпочтительно, поворотным вектором тяги Fхк. Его можно использовать комплексно - и для увеличения суммарной продольной тяги объединенной энергосиловой установки (см. фиг. 1).
Разумеется, имеются также шасси 17, 18 (см. фиг. 1).
Описанный пример конкретного варианта конструкции не исключает других возможных вариантов устройства в рамках заявляемой совокупности существенных конструктивных признаков (см. формулу изобретения).
Заявляемое устройство работает следующим образом.
В вертолетном режиме (см. фиг. 1) винтокрыл взлетает, садится и зависает в воздухе при вращающемся (угловая скорость ротора n>0) от своей силовой установки 9 (двигателя 10 и привода со сцеплением 11 и редуктором 12) винте за счет вертикальной его тяги Fzv. В варианте устройства с единичным винтом образующийся при этом дестабилизирующий реактивный момент в плоскости винта компенсируется, например, моментом силы Fхк в плоскости, параллельной плоскости вращения винта, возникающим при работе компенсирующей хвостовой энергетической установки 16. В варианте же устройства со сдвоенным винтом реактивные моменты от обоих винтов компенсируют друг друга (что, разумеется, не является принципиально новым).
Благодаря наличию устройства с изменяемым шагом винта принудительный синхронный поворот лопастей 8 на вилках 7 в ту или иную определенную сторону и на определенную величину вызывает изменение модуля вектора тяги винта Fzv, что можно использовать для маневрирования аппарата по высоте полета, взлетать, зависать и садиться (что тоже не является принципиально новым).
Достигнув достаточных для перехода на горизонтальный полет высоты и прочих необходимых или возможных условий, осуществляют переходный («вертолетно-самолетный») эксплуатационный режим (см. фиг. 1-2) винтокрыла: имеющимися (путем отключения муфты сцепления 11 и включения тормоза 13 по команде системы управления 14 (показана пунктирной стрелкой на фиг 5) по достижении заданного азимута 180° угла установки и фиксации ротора 6, когда одна из вилок 7, а значит и лопастей 8 располагается вдоль продольной вертикальной плоскости фюзеляжа 1 с ориентацией назад, в сторону хвостового оперения 15) или дополнительно предусмотренными для этого (см. вариант с дополнительным устройством торможения и фиксации) средствами прекращают вращение вертолетного винта и фиксируют его в этом положении обратной Y-стреловидности винта как уже самолетного крыла специфической формы, с углом стреловидности (по модулю) α=360°/2/2=60°. То есть предварительно расфиксировав и зафиксировав ротор 6 в указанном положении. Ибо обратная стреловидность рациональна на дозвуковых скоростях.
После этого начинают чисто самолетный режим перемещения винтокрыла в пространстве (угловая скорость ротора n=0 - см. фиг. 2), сперва - продольный его разгон за счет ориентированных по оси Х векторов тяги Fx1+Fx2 двигателей 2, 3 плюс, в определенных пределах (в варианте с хвостовым компенсирующим двигателем 16) вектора тяги Fхк. При этом силовые установки 2, 3, 16 включают и выводят на потребный режим работы своевременно, во-избежание недопустимого или нежелательного уменьшения суммарной подъемной силы при обнулении тяги Fzv и с учетом наличия и роста подъемной силы FP винта-крыла (некоторая незначительная ее часть неизбежно появляется еще на выбеге вращения винта) и, кроме того, самолетных крыльев 4, 5.
Для перехода на скоростной (крейсерский сверхзвуковой) самолетный режим полета крыло-винт переводят, за счет основного (путем повторного отключения муфты сцепления 11 и включения тормоза 13 по команде системы управления по достижении заданного угла установки и фиксации ротора 6) или/и дополнительного, специализированного привода аналогичным образом, на угол прямой Y-стреловидности, с углом стреловидности (по модулю) α=360°/2/2=60° и ориентацией одной из вилок 7, а значит и лопасти 8 вдоль продольной вертикальной плоскости фюзеляжа 1 с ориентацией вперед по направлению полета (см. фиг. 3) - с азимутом 0°. То есть снова предварительно расфиксировав и зафиксировав ротор 6 в новом указанном положении. На современном этапе развития подобной авиационной техники следует рассчитывать на максимальную скорость заявляемого аппарата в диапазоне 600-1200 км/ч.
Маневрирование аппарата в самолетном режиме в любом скоростном диапазоне полета возможно как путем изменения шага крыла-винта (его наклона) в случае выполнения его наклоняемым, либо изменением углов атаки самолетных крыльев (при наличии соответствующих технических средств), либо изменением направления векторов продольной тяги (Fx1; Fx2) в случае применения управляемых самолетных двигателей 2, 3 и 16, или управлением векторами тяги (если это предусмотрено устройством силовых установок), либо указанными действиями совместно или выборочно-совместно.
В случае выполнения силовой установки 9 к движителю вертолетного типа, в общем случае, с возможностью затормаживания и фиксации винта не только в симметричном его положении относительно продольной вертикальной плоскости фюзеляжа 1, но и в иных, асимметричных положениях, такие положения (асимметричные) могли бы применяться для создания управляющих моментов при маневрировании летательного аппарата в самолетном режиме и для компенсации боевых повреждений, давших асимметрию аэродинамики аппарата. Иначе говоря, и здесь появляются новые возможности балансировки винтокрыла, а значит и всей его авионики.
Описанный выше процесс работы заявляемого устройства является, по сути, способом преобразования вертолета в самолет с существенно расширенными тактико-техническими возможностями, заключающийся (как и способ по патентам RU 2081032 и RU 2369525) в остановке несущего винта в полете и последующем размещении его крылообразующих лопастей относительно набегающего потока с возможностью образования на аэродинамических поверхностях крылообразующих лопастей, закрепленных поворотно на вилках, подъемной силы крыла самолета, и отличающийся от аналога RU 2081032 тем, что для вертолета как с одним, так и с двумя несущими соосными винтами производят последовательную или одновременную остановку несущих винтов, а симметричное расположение их лопастей относительно набегающего потока обеспечивают принудительным торможением и активной фиксацией несущего винта в неподвижном положении относительно фюзеляжа с расположением одной из вилок каждого винта, по меньшей мере вдоль продольной вертикальной плоскости фюзеляжа выборочно либо назад, либо вперед, с образованием при этом крылообразующими лопастями, соответственно, обратной или прямой Y-образной стреловидности. А в общем случае - в любом положении, обеспечивающим определенную, асимметричную Y-стреловидность и даже (при маневрировании) Х-образную стреловидность.
Таким образом, использование изобретения позволяет повысить тактико-технические характеристики и возможности устройства как летательного аппарата, за счет расширения функций винта вертолетного типа, а именно - не только крыла с прямой и обратной Y-образной стреловидностью для создания аэродинамической подъемной силы при продольном перемещении, в самолетном режиме при работающих турбореактивном или реактивном движителях с продольной тягой в широком (до- и сверхзвуковом диапазоне скоростей полета), но и обеспечения возможности оперативно изменять геометрию такого крыла - его стреловидность на «нулевую» (Х-образную). Или в асимметричную Y-образную в зависимости от скорости полета и совершаемого маневра в конкретных условиях эксплуатации, обеспечив тем самым возможность стабилизировать аппарат в полете путем асимметричного изменения геометрии крыла-винта (крыла-ротора). Причем без существенного ухудшения массогабаритных, весовых и экономических показателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОКРЫЛ | 2017 |
|
RU2673754C2 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2581110C1 |
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
| СКОРОСТНОЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2015 |
|
RU2609856C1 |
| Конвертоплан | 2024 |
|
RU2835584C1 |
| КОНВЕРТОПЛАН С РЕАКТИВНЫМ ПРИВОДОМ РОТОРОВ, УПРАВЛЯЕМЫЙ РОТОРАМИ ПОСРЕДСТВОМ АВТОМАТОВ ПЕРЕКОСА ЧЕРЕЗ РЫЧАГИ УПРАВЛЕНИЯ, НЕ ТРЕБУЮЩИЙ ДОПОЛНИТЕЛЬНЫХ СРЕДСТВ УПРАВЛЕНИЯ | 2013 |
|
RU2570241C2 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОВИНТОКРЫЛ | 2009 |
|
RU2432300C2 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2658736C1 |
| ТЯЖЕЛЫЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ (ВАРИАНТЫ) | 2012 |
|
RU2492112C1 |
Изобретение относится к области авиации, в частности к конструкциям комбинированных вертолетов. Винтокрыл содержит фюзеляж, комбинированный воздушный движитель, устройство преобразования несущего винта в статическую стреловидную совокупность крылообразующих лопастей. Комбинированный движитель включает в себя движитель самолетного типа с продольным вектором тяги и винтовой движитель вертолетного типа с поперечным вектором тяги. Вертолетный движитель выполнен в виде ротора с, по меньшей мере, одним несущим винтом с тремя крылообразующими лопастями, обеспечивающими получение аэродинамической подъемной силы как при вращении ротора от энергосиловой установки с управляемой муфтой сцепления в вертолетном режиме полета, так и при обдуве встречным продольным потоком воздуха от энергосиловой установки движителя самолетного типа в самолетном режиме полета. Устройство преобразования несущего винта в статическую стреловидную совокупность крылообразующих лопастей выполнено с возможностью торможения и фиксации несущего винта в неподвижном положении относительно фюзеляжа с расположением лопастей выборочно под любым углом по азимуту к продольной вертикальной плоскости фюзеляжа в диапазоне от 0 до 360°, с образованием крылообразующими лопастями симметричной или асимметричной Y-образной стреловидности, а в случае соосных винтов - с образованием Х-образной схемы сдвоенных винтов. Достигается повышение тактико-технических характеристик. 1 з.п. ф-лы, 6 ил.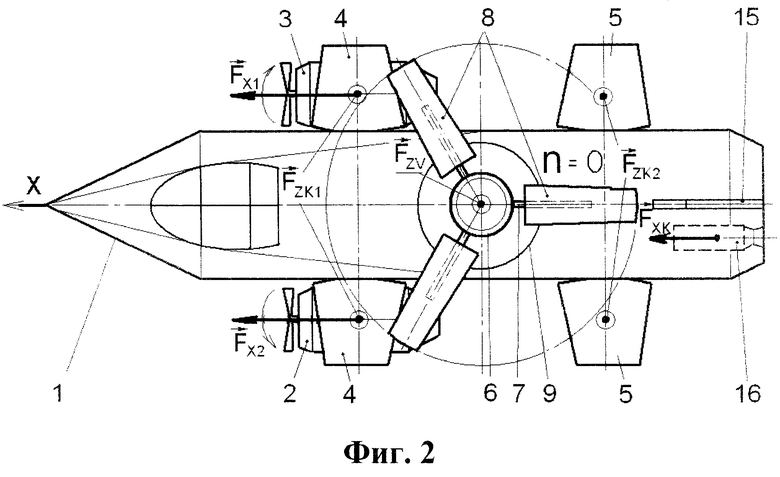
1. Винтокрыл, содержащий фюзеляж и комбинированный воздушный движитель, включающий в себя движитель самолетного типа с продольным вектором тяги, преимущественно для горизонтального полета, и винтовой движитель вертолетного типа и поперечным вектором тяги, преимущественно для вертикального полета, в виде ротора, по меньшей мере, с одним несущим винтом с тремя крылообразующими лопастями с профилем для получения аэродинамической подъемной силы на них как при вращении ротора от энергосиловой установки с управляемой муфтой сцепления, по крайней мере, в приводе ротора, в вертолетном режиме полета, так и при обдуве встречным продольным потоком воздуха от энергосиловой установки движителя самолетного типа в самолетном режиме полета, устройство преобразования несущего винта в статическую стреловидную совокупность крылообразующих лопастей в различном ее угловом положении с ориентацией одной из лопастей вдоль продольной вертикальной плоскости фюзеляжа выборочно либо назад, либо вперед, с образованием при этом крылообразующими лопастями, соответственно, симметричной обратной или прямой Y-образной стреловидности, отличающийся тем, что устройство преобразования несущего винта в статическую стреловидную совокупность крылообразующих лопастей выполнено с дополнительной возможностью торможения и фиксации несущего винта в неподвижном положении относительно фюзеляжа с расположением лопастей выборочно под любым другим углом по азимуту к продольной вертикальной плоскости фюзеляжа в диапазоне от 0 до 360°, с образованием крылообразующими лопастями асимметричной Y-образной стреловидности соответствующей угловой величины.
2. Винтокрыл по п.1, отличающийся тем, что он содержит два соосных трехлопастных несущих винта по схеме сдвоенного несущего винта разнонаправленного вращения в вертолетном режиме, а устройство преобразования несущего винта в статическую стреловидную совокупность крылообразующих лопастей выполнено с дополнительной возможностью торможения и фиксации обоих Y-образных винтов в неподвижном положении относительно фюзеляжа с расположением лопастей в положениях, выборочно, как с одинаковой, так и различной Y-стреловидностью, причем в последнем случае - с взаимным угловым смещением по азимуту на 180°, с образованием X-образной схемы сдвоенного винта как совокупности двух соосных винтов.
| СПОСОБ ДАНИЛИНА ПРЕОБРАЗОВАНИЯ ВЕРТОЛЕТА В САМОЛЕТ И ВЕРТОЛЕТ "ВЕДАН" | 1993 |
|
RU2081032C1 |
| КОНВЕРТОЛЕТ | 2008 |
|
RU2369525C2 |
| US 6193464 B1, 27.02.2001 | |||
| US 7918415 B2, 05.04.2011. | |||

