Изобретение относится к системе управления регуляторами давления, в частности для обеспечения регулирования давления при производстве и транспортировке взрывоопасных текучих сред. Такую систему управления используют при работе с газом в зонах, классифицируемых как «взрывоопасные зоны».
Как известно, газопроводы оснащают регуляторами давления. Регулятор давления обычно содержит управляющую мембрану, которая сжимается или разжимается, чтобы обеспечивать регулирование давления в трубопроводе ниже регулятора давления по потоку. Такое сжимание и разжимание мембраны регулятора давления может осуществляться путем непосредственного воздействия на регулятор давления или вспомогательным устройством, подключенным к регулятору давления.
Упомянутые регуляторы давления, как правило, приводятся в действие с помощью винта/болта. Винт обычно воздействует на пружину вспомогательного устройства или непосредственно на пружину регулятора давления.
Приведение в действие указанного регулятора давления осуществляется исключительно вручную посредством механического вращения оператором винта/гайки с использованием специального инструмента.
Помимо неточности, такая ручная настройка требует определенного времени и не позволяет немедленно реагировать на неисправность или аномальное явление. В свете вышеизложенного, операцию регулирования давления выполняют только один раз во время установки или технического обслуживания регулятора давления.
Более того, не будучи оснащенным электронным интерфейсом, такой регулятор давления не может дистанционно управляться традиционным способом, и его автоматическое приведение в действие невозможно.
В патентном документе DE 102008029008 раскрыт регулятор давления для взрывоопасных зон, содержащий пневматический клапан, который управляется находящейся под давлением текучей средой, протекающей по каналу управления.
В описании «Модели МР2400 преобразователя М/Р низкого давления» фирмы «Фэйрчайлд» раскрыт регулятор давления для взрывоопасных зон, снабженный вспомогательным устройством с электроприводом. Указанное вспомогательное устройство встроено в регулятор давления и не может быть использовано с существующим регулятором давления, в котором регулировочный винт приводится в действие вручную. Вспомогательное устройство модели МР2400 снабжено шаговым электродвигателем, ведущий вал (регулировочный винт) которого сжимает пружину. Поэтому указанная модель МР2400 не снабжена переходным устройством для соединения с регулировочным винтом. Шаговый электродвигатель вспомогательного устройства должен питаться от источника переменного напряжения 114 В. Недостатком указанной модели вспомогательного устройства с электроприводом, как и других вспомогательных устройств с электроприводом, является необходимость наличия специального источника электропитания и невозможность работы с другими источниками электропитания.
В документе US 3216278 раскрыт механизм управления клапаном, содержащий множество шестерен и сцепление для выборочного управления механизмом посредством электропривода или ручного маховика.
Задачей изобретения является устранение недостатков предшествующего уровня техники посредством создания системы управления регуляторами давления, обладающей высоким кпд, эффективной, надежной и пригодной для использования с текучими средами во взрывоопасных зонах.
Другой задачей изобретения является создание универсальной системы управления регуляторами давления, которая подходит для существующих регуляторов давления с ручным управлением регулировочным винтом.
Еще одной задачей изобретения является создание такой системы управления регуляторами давления, которая подходит для автоматического приведения в действие и дистанционного управления.
Еще одной задачей изобретения является создание такой системы управления регуляторами давления, которая пригодна для имплантатов, работающих от источников электрической энергии различного номинала и типа напряжения (постоянное/переменное).
Эти задачи решаются в изобретении согласно независимому пункту 1 формулы изобретения.
Предпочтительные варианты осуществления изобретения очевидны из зависимых пунктов формулы изобретения.
Система управления согласно изобретению содержит:
- регулятор давления для регулирования давления в трубопроводе, по которому транспортируется взрывоопасный газ, при этом регулятор давления включает в себя:
- корпус, приспособленный для установки в трубопроводе,
- фланец, соединенный с корпусом,
- хвостовик, выступающий от фланца и имеющий конец, снабженный резьбовым отверстием,
- регулировочный винт, ввинчиваемый в резьбовое отверстие хвостовика для регулирования давления газа, при этом указанный регулировочный винт имеет головку,
- переходник с корпусом, снабженным отверстием для приема головки указанного регулировочного винта;
- привод с приводным валом, соединенным с указанным переходником для приведения переходника во вращение и ввинчивания/вывинчивания указанного регулировочного винта, и
- опору с корпусом, имеющим первый конец, в котором выполнено первое отверстие, предназначенное для приема указанного хвостовика регулятора давления, и второй конец, в котором выполнено второе отверстие, предназначенное для приема указанного корпуса переходника, при этом оба отверстия соединены друг с другом, причем указанный привод представляет собой электропривод, а система также содержит кабельную коробку, электрически соединенную с электроприводом, причем указанная кабельная коробка соединена с источником электропитания электропривода и с сетью связи/управления для дистанционного управления электроприводом.
Преимущества системы управления согласно изобретению очевидны, поскольку она обеспечивает автоматическое дистанционное управление ручным регулятором давления, который может быть использован в горнодобывающей промышленности при наличии рудничного газа и в наземных отраслях промышленности при наличии взрывоопасных газов и порошков.
Дополнительные особенности изобретения очевидны из последующего подробного описания со ссылкой на чертежи, носящие чисто поясняющий, неограничительный характер.
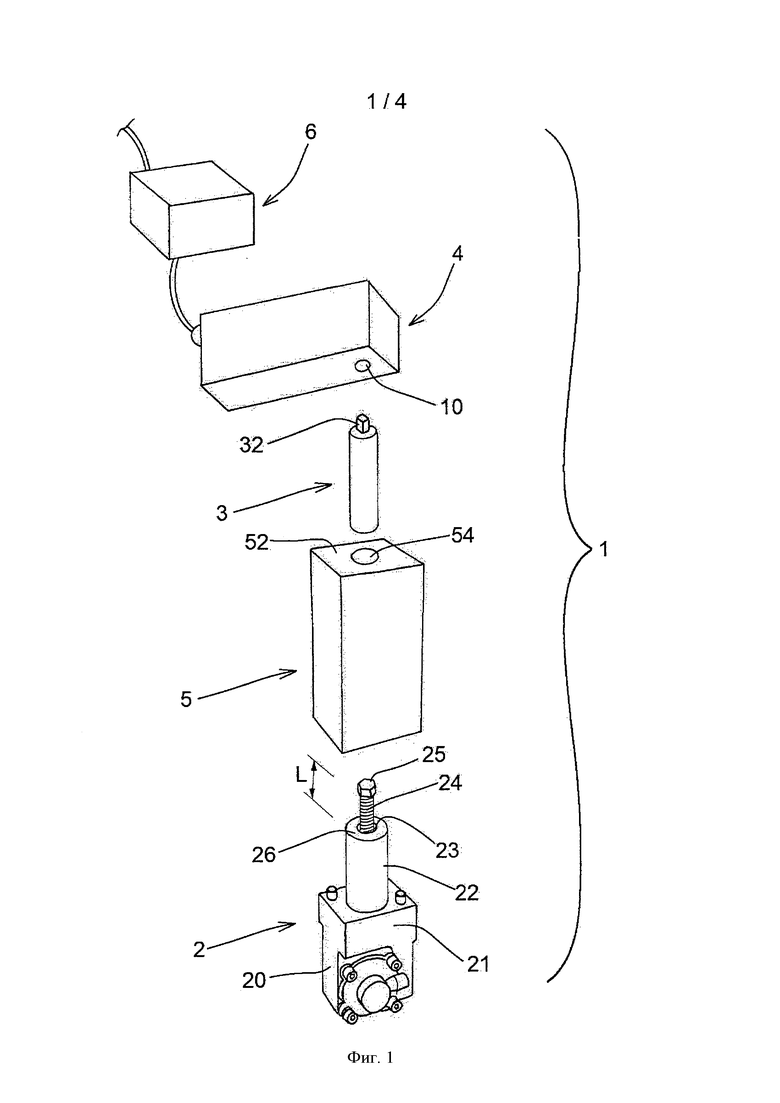
На фиг. 1 показана в разобранном состоянии система управления согласно изобретению, вид в перспективе;
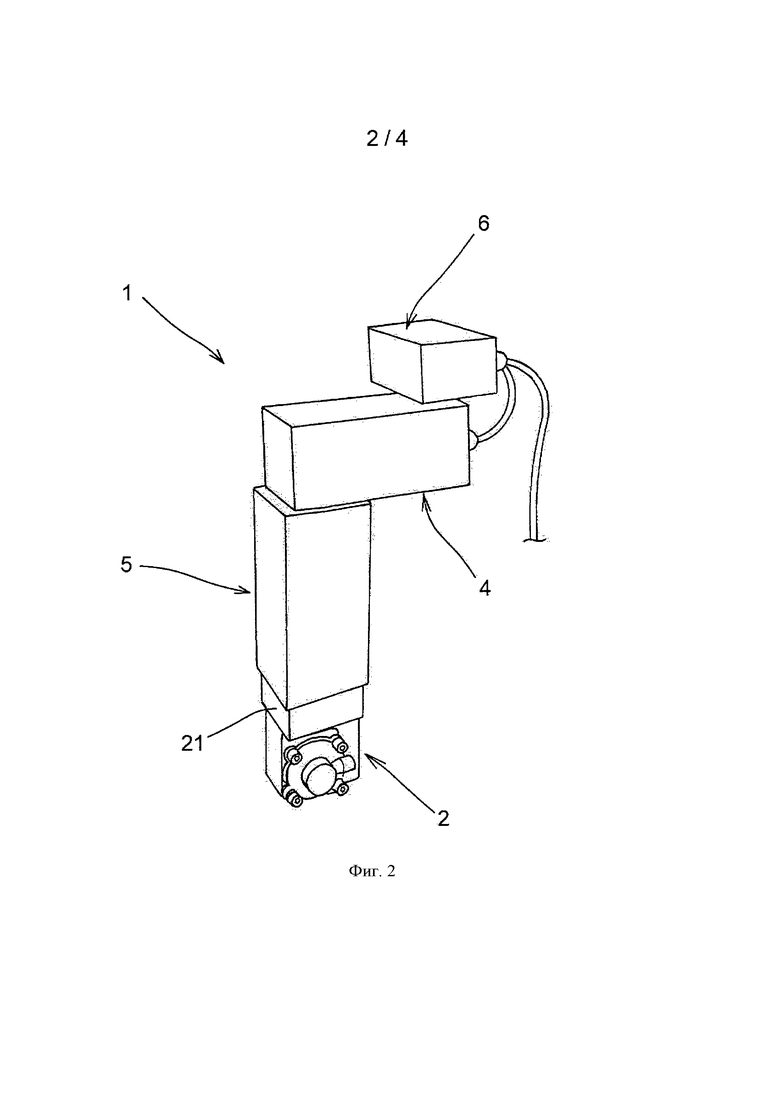
на фиг. 2 - показанная на фиг. 1 система управления, вид в собранном состоянии;
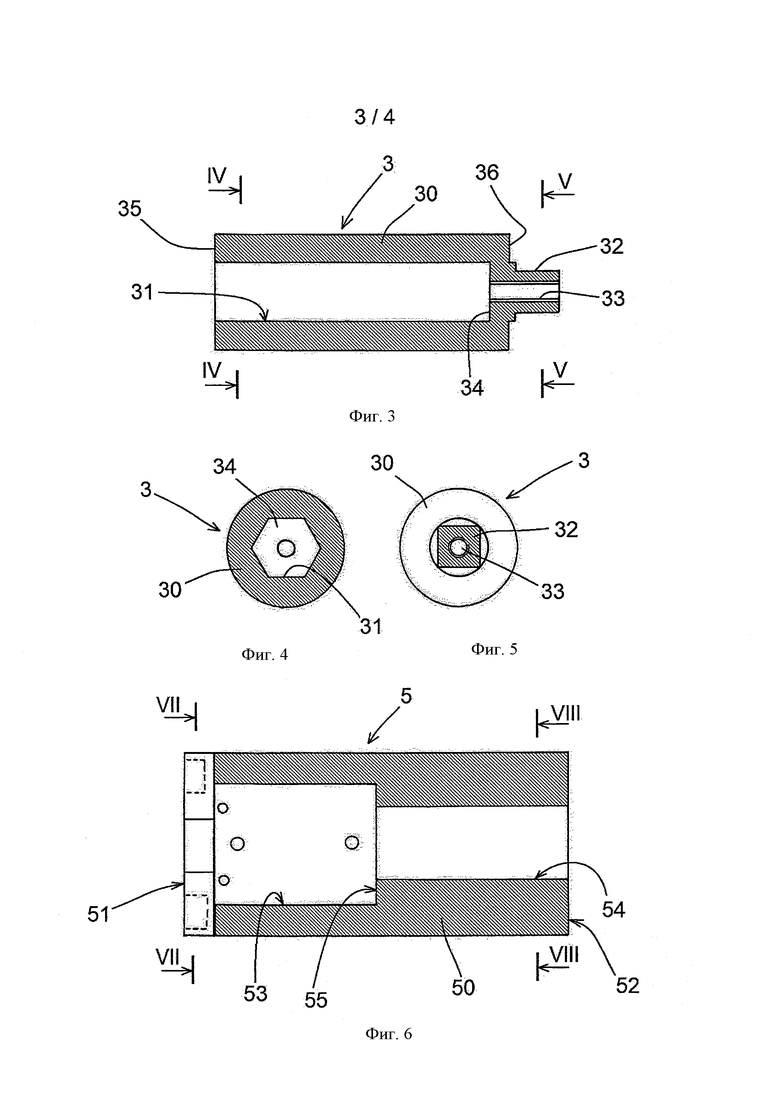
на фиг. 3 - переходник показанной на фиг. 1 системы управления, вид в осевом разрезе;
на фиг. 4 и 5 - переходник, виды в разрезе по линиям IV-IV и V-V, показанным на фиг. 3, соответственно;
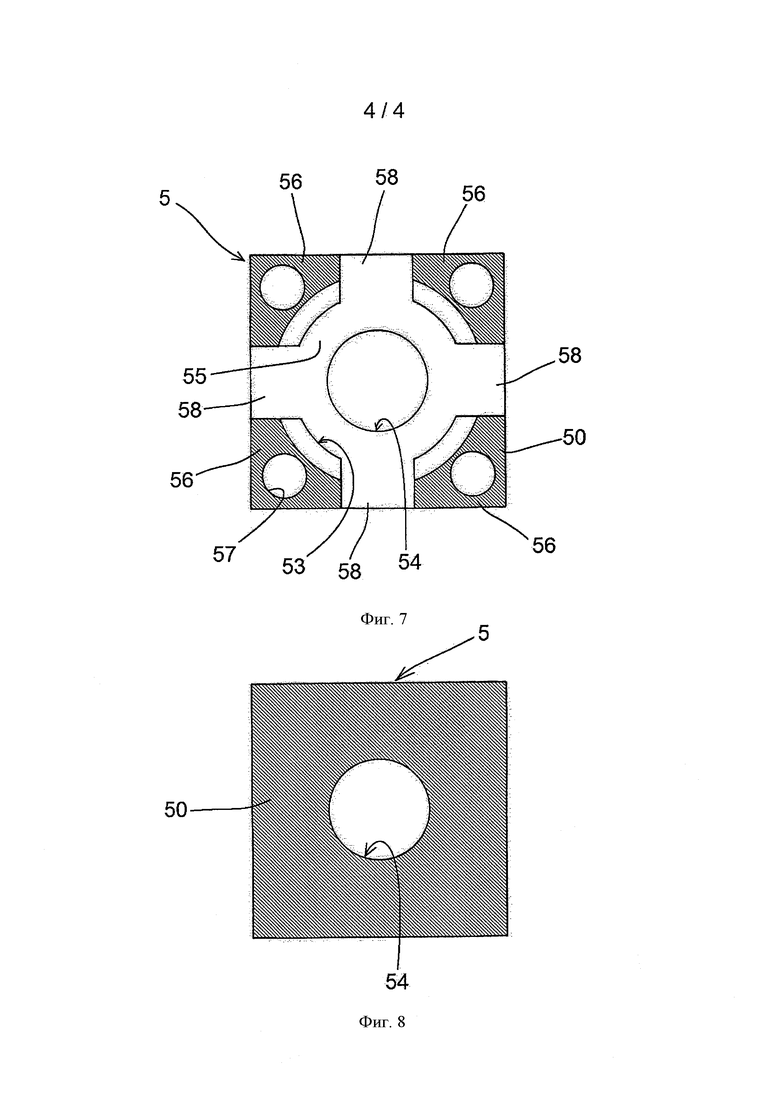
на фиг. 6 - опора показанной на фиг. 1 системы управления, вид в разрезе;
на фиг. 7 и 8 - разрезы по линиям VII -VII и VIII-VIII на фиг. 6 соответственно.
Система управления, в целом указанная ссылочным обозначением (1), раскрыта со ссылкой на вышеупомянутые фигуры.
На фиг. 1 показано, что система управления (1) содержит:
- регулятор (2) давления для регулирования давления взрывоопасного газа, протекающего внутри трубопровода,
- переходник (3) для соединения с регулятором (2) давления,
- привод (4) для приведения в действие переходника (3),
- опору (5), поддерживающую переходник (3) и привод (4).
Система (1) управления содержит кабельную коробку (6), соединенную с приводом (4), если источник (6) питания привода находится на удалении от места, где установлен регулятор (2) давления.
Регулятор (2) давления относится к регуляторам известного типа и имеет корпус (20), приспособленный для ввода в трубопровод, по которому протекает взрывоопасный газ. Фланец (21) соединен с корпусом регулятора давления, а хвостовик (22) выступает от фланца (21) таким образом, что находится с внешней стороны газопровода.
Хвостовик (22) регулятора давления на одном конце (26) имеет резьбовое отверстие (23), проходящее внутри хвостовика (22) в его осевом направлении. Регулировочный винт (24) ввинчен в резьбовое отверстие (23) хвостовика. Регулировочный винт (24) имеет головку (25) многоугольного, предпочтительно шестиугольного, поперечного сечения.
Регулировочный винт (24) толкает пружину или непосредственно мембрану, расположенную внутри регулятора давления, которая регулирует давление газа, протекающего внутри трубопровода. Для увеличения давления регулировочный винт (24) ввинчивают в хвостовик (22) и совершают ход ввинчивания; напротив, для уменьшения давления регулировочный винт (24) вывинчивают из хвостовика (22) и совершают ход вывинчивания. Операция увеличения или уменьшения давления в зависимости от направления вращения винта/болта носит поясняющий, а не ограничительный характер.
Ходы завинчивания и вывинчивания регулировочного винта (24) зависят от минимального и максимального значений давления, которые необходимо получить, таким образом определяя конечные положения хода завинчивания и хода вывинчивания. Когда регулировочный винт находится на конце хода вывинчивания, верхний конец головки (25) регулировочного винта в используемых регуляторах давления выступает относительно конца (26) хвостовика на максимальную длину (L).
Хотя в целях пояснения на чертежах показан хвостовик (22) цилиндрической формы, указанный хвостовик (22) может иметь любую форму или может быть заменен вспомогательным устройством, в котором вращается регулировочный винт. Ввиду того, что вспомогательное устройство относится к известному типу, его описание опущено.
Как показано на фиг. 3, 4 и 5, переходник (3) содержит корпус (30) с первым концом (35) и вторым концом (36). Предпочтительно, корпус (30) переходника имеет цилиндрическую форму. Корпус переходника на первом конце (35) имеет отверстие (31), проходящее внутри корпуса переходника вдоль его оси. Указанное отверстие (31) в корпусе переходника имеет размеры, поволяющие принимать головку (25) регулировочного винта/болта. Поскольку головка (25) регулировочного винта имеет многоугольное, предпочтительно шестиугольное, поперечное сечение, отверстие (31) в корпусе переходника имеет многоугольное, предпочтительно шестиугольное, поперечное сечение. Длина отверстия (31) в корпусе переходника соответственно имеет такие размеры, чтобы вмещать максимальную выступающую длину (L) верхнего конца головки (25) регулировочного винта относительно конца (26) хвостовика регулятора давления, когда регулировочный винт находится в конце хода вывинчивания.
Соединительный стержень (32) выступает в осевом направлении наружу от второго конца (36) корпуса переходника. Указанный соединительный стержень (32) имеет многоугольное, предпочтительно квадратное, поперечное сечение. Резьбовое отверстие (33) проходит в осевом направлении внутри соединительного стержня (32). Указанное резьбовое отверстие (33) может быть глухим или может быть соединено с отверстием (31) в корпусе переходника. В любом случае, отверстие (33) в соединительном стержне имеет меньшие размеры, чем отверстие (31) в переходнике, для образования заплечика (34) внутри корпуса переходника на конце отверстия (31).
Возвращаясь к фиг. 1, привод (4) содержит приводной вал (40), находящийся в зацеплении с соединительным стержнем (32) переходника. Винтовые средства (не показаны) ввинчивают в резьбовое отверстие (33) соединительного стержня переходника, чтобы обеспечить соединение с приводным валом.
Как показано на фиг. 6, 7 и 8, опора (5) имеет корпус (50) с первым концом (51) и вторым концом (52). Корпус (50) опоры может иметь, например, форму параллелепипеда или цилиндра.
Первое отверстие (52) расположено в осевом направлении в первом конце (51) корпуса опоры и имеет размеры, позволяющие принимать хвостовик (22) регулятора давления. Если хвостовик (22) регулятора давления имеет цилиндрическую форму, то и первое отверстие (52) опоры также имеет цилиндрическую форму.
Второе отверстие (53) расположено в осевом направлении во втором конце (52) корпуса опоры и имеет размеры, позволяющие принимать корпус (30) переходника. Если корпус (30) переходника имеет цилиндрическую форму, то и второе отверстие (52) опоры также имеет цилиндрическую форму.
Оба отверстия (53, 54) в опоре соединены друг с другом внутри опоры.
Если указанные отверстия имеют цилиндрическую форму, то диаметр первого цилиндрического отверстия (53) больше, чем диаметр второго цилиндрического отверстия (54). Соответственно, внутри опоры образован заплечик (55).
Как показано на фиг. 7, первый конец (51) опоры снабжен четырьмя ножками (56), расположенными в четырех углах квадрата, чтобы упираться во фланец (21) регулятора давления. В каждой ножке (65) выполнено отверстие (65) для приема болтов, выступающих от фланца регулятора давления. Между четырьмя ножками (56)образованы четыре прохода (58), расположенных в форме креста.
Переходник (3) и опора (5) выполнены из металла, такого как сталь или алюминий. Переходник (3) и опора (5) могут быть также выполнены из твердой пластмассы, такой как, например, акрилонитрил-бутадиен-стирол (АБС), способом литья под давлением.
Привод (4) относится к приводам известного типа и предназначен для использования во взрывоопасных зонах. Привод (4) является электроприводом, подходящим для обеспечения вращения приводного вала (40).
Предпочтительно, привод (4) представляет собой электропривод вращения с тремя состояниями, сертифицированный АТЕХ в соответствии с рекомендациями Европейской директивы 94/9/СЕ, со смешанными методами защиты типа антивзрыв и искробезопасность, чтобы работать в условиях наличия взрывоопасного газа или порошка, т.е. во взрывоопасных зонах.
Для того чтобы получить универсальную систему для имплантатов, имеющих различные источники электроэнергии (сеть, аккумулятор, солнечные батареи и т.д.), привод (4) содержит блок питания, пригодный для работы с целым рядом входных постоянных напряжений от 24 В до 240 В±10% или переменных напряжений от 24 В до 240 В±10% частотой от 50 Гц до 60 Гц±20%. В этом случае электронные устройства привода (4) распознают уровень приложенного к приводу напряжения и, соответственно, автоматически управляют приводом.
Привод (4) при подаче на него питания может вращаться по часовой или против часовой стрелки в соответствии с сигналами управления, посылаемыми системой дистанционного управления. Для того чтобы вращать привод (4) по часовой стрелке или против часовой стрелки, система дистанционного управления управляет электронной схемой переключения привода, соединяющей два электрических контакта привода (состояние 1), предназначенных для вращения по часовой стрелке, или два других электрических контакта привода (состояние 2), предназначенных для вращения против часовой стрелки. Когда привод остановлен, он находится в состоянии покоя (состояние 3), в котором электрические контакты состояния 1 и состояния 2 разомкнуты.
Далее приведено описание процессов сборки и работы системы управления согласно изобретению.
Опору (5) устанавливают на регуляторе (2) давления таким образом, чтобы хвостовик (22) регулятора давления был вставлен в первое отверстие (53) в опоре на такую глубину, что конец (26) хвостовика регулятора давления упирается в заплечик (55) опоры, а фланец (21) регулятора давления упирается в первый конец (51) опоры. Ввиду вышеизложенного, регулировочный винт (25) проходит в осевом направлении внутри второго отверстия (54) в опоре.
Переходник (3) вставляют во второе отверстие (54) в опоре таким образом, чтобы головка (25) регулировочного винта находилась в зацеплении внутри отверстия (31) в переходнике.
Соединительный стержень (32) переходника соединяют с приводным валом (40). Привод (4) может быть соединен с кабельной коробкой (6). Кабельная коробка (6) электрически соединена с источником питания для питания привода (4) и с сетью связи/управления для дистанционного управления приводом (4).
Таким образом, привод (4) может быть приведен в действие с удаленной станции. Вращение приводного вала (40) в любом направлении приводит к вращению переходника (3) и, следовательно, к ввинчиванию или вывинчиванию регулировочного винта (24), таким образом автоматически регулируя давление газа.
Специалист в данной области техники может выполнить многочисленные вариации и модификации варианта осуществления изобретения, не выходя за рамки объема изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ЗАБОЯ СКВАЖИНЫ | 1993 |
|
RU2097531C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| УСТАНОВКА ОДНОВРЕМЕННО-РАЗДЕЛЬНОЙ ЭКСПЛУАТАЦИИ ДВУХ ПЛАСТОВ ОДНОЙ СКВАЖИНОЙ | 2012 |
|
RU2513896C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 2003 |
|
RU2247318C2 |
| Устройство для стравливания газа из емкости высокого давления | 2024 |
|
RU2835294C1 |
| Устройство непрерывного измерения пластового давления и давления в межтрубном пространстве | 2023 |
|
RU2820943C1 |
| СПОСОБ ДОБЫЧИ ФЛЮИДА ИЗ ПЛАСТОВ ОДНОЙ СКВАЖИНЫ ЭЛЕКТРОПРИВОДНЫМ НАСОСОМ С ЭЛЕКТРИЧЕСКИМ КЛАПАНОМ И УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2008 |
|
RU2385409C2 |
| Способ изготовления внутреннего отверстия в трубе при помощи расточного устройства | 2024 |
|
RU2839745C1 |
| Устройство для сварки | 1981 |
|
SU1026995A1 |
Изобретение относится к системе управления, которая предназначена для регулирования давления при производстве и транспортировке взрывоопасных текучих сред. Система (1) управления содержит регулятор (2) давления с регулировочным винтом (24) для регулирования давления внутри трубопровода, используемого для транспортировки взрывоопасных газов, переходник (3) с отверстием (31) для приема головки (25) регулировочного винта, привод (4), приспособленный для использования во взрывоопасных зонах, имеющий приводной вал (40), соединенный с переходником (3), опору (5) с корпусом (50), имеющим первый конец (51), в котором выполнено первое отверстие (53), предназначенное для приема хвостовика (22) регулятора давления, и второй конец (52), в котором выполнено второе отверстие (54), предназначенное для приема переходника (3). При этом указанный привод (4) представляет собой электропривод, а система также содержит кабельную коробку (6), электрически соединенную с электроприводом (4), причем указанная кабельная коробка (6) соединена с источником электропитания электропривода (4) и с сетью связи/управления для дистанционного управления электроприводом (4). В результате система управления обеспечивает высокую надежность и пригодна для использования с текучими средами во взрывоопасных зонах. 10 з.п. ф-лы, 8 ил.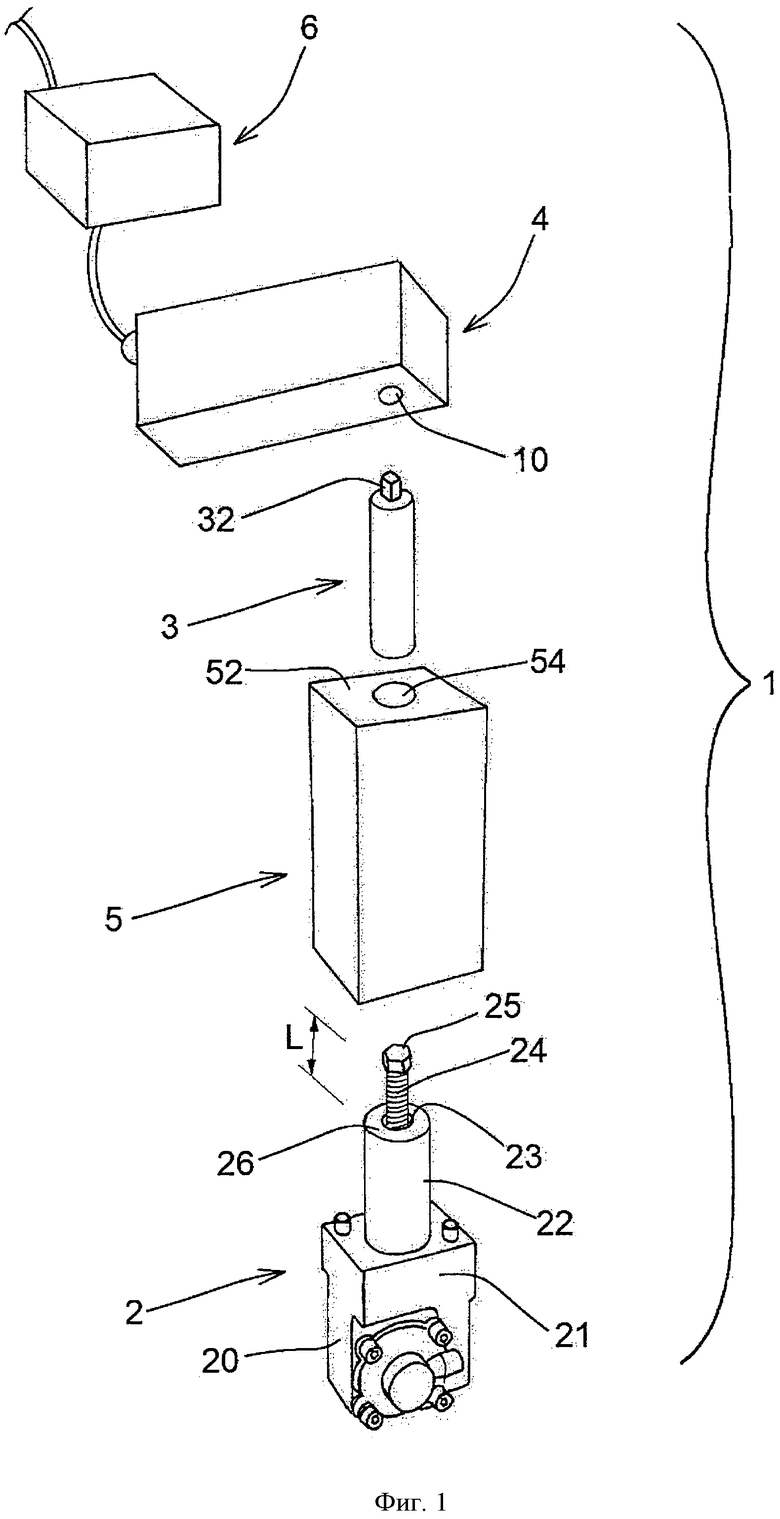
1. Система (1) управления, содержащая:
- регулятор (2) давления для регулирования давления в трубопроводе, по которому транспортируется взрывоопасный газ, при этом регулятор давления включает в себя:
- корпус (20), приспособленный для установки в трубопроводе,
- фланец (21), соединенный с корпусом,
- хвостовик (22) или вспомогательное устройство, выступающее от фланца и имеющее конец (26), снабженный резьбовым отверстием (23),
- регулировочный винт (24), ввинчиваемый в резьбовое отверстие (23) хвостовика для регулирования давления газа, при этом указанный регулировочный винт имеет головку (25);
- переходник (3) с корпусом (30), снабженным отверстием (31) для приема головки (25) указанного регулировочного винта;
- привод (4) с приводным валом (40), соединенным с указанным переходником (3) для приведения переходника во вращение и ввинчивания/вывинчивания указанного регулировочного винта (24), при этом указанный привод (4) приспособлен для использования во взрывоопасных зонах,
- опору (5) с корпусом (50), имеющим первый конец (51), в котором выполнено первое отверстие (53), предназначенное для приема указанного хвостовика (22) регулятора давления, и второй конец (52), в котором выполнено второе отверстие (54), предназначенное для приема указанного корпуса (30) переходника, при этом оба отверстия (53, 54) соединены друг с другом,
отличающаяся тем, что указанный привод (4) представляет собой электропривод, а система также содержит кабельную коробку (6), электрически соединенную с электроприводом (4), причем указанная кабельная коробка (6) соединена с источником электропитания электропривода (4) и с сетью связи/управления для дистанционного управления электроприводом (4).
2. Система (1) управления по п.1, в которой корпус (30) указанного переходника имеет цилиндрическую форму, хвостовик (22) указанного регулятора давления имеет цилиндрическую форму, указанное первое отверстие (53) в опоре имеет цилиндрическую форму, и второе отверстие (54) опоры имеет цилиндрическую форму.
3. Система (1) управления по п.2, в которой диаметр указанного второго отверстия (54) в опоре меньше диаметра указанного первого отверстия (53) в опоре, вследствие чего в указанной опоре образован заплечик (55).
4. Система (1) управления по п.1, в которой головка (25) указанного регулировочного винта имеет многоугольное поперечное сечение, и указанное отверстие (31) в корпусе переходника имеет многоугольное поперечное сечение, комплементарное периметру головки регулировочного винта.
5. Система (1) управления по п.4, в которой головка (25) указанного регулировочного винта имеет шестиугольное поперечное сечение, и указанное отверстие (31) корпуса переходника имеет шестиугольное поперечное сечение, комплементарное периметру головки регулировочного винта.
6. Система (1) управления по п.1, в которой указанное отверстие (31) в корпусе переходника имеет длину, подходящую для размещения максимальной выступающей длины (L) верхнего конца головки (25) регулировочного винта относительно конца (26) хвостовика регулятора давления, когда регулировочный винт находится в конце хода вывинчивания.
7. Система управления (1) по п.1, в которой указанный переходник (3) имеет соединительный стержень (32), выступающий от корпуса (30) переходника в осевом направлении, для соединения с приводным валом (40) указанного привода.
8. Система (1) управления по п.7, в которой соединительный стержень (32) имеет многоугольное, предпочтительно квадратное, поперечное сечение.
9. Система (1) управления по п.7, в которой соединительный стержень (32) имеет осевое резьбовое отверстие (33).
10. Система (1) управления по п.1, в которой указанный электропривод включает в себя:
- блок питания, пригодный для питания от источника постоянного напряжения от 24 В до 240 В ± 10% или источника переменного напряжения от 24 В до 240 В ± 10% частотой от 50 Гц до 60 Гц ± 20%, и
- электронные устройства, способные распознавать уровень приложенного к электроприводу напряжения и соответственно автоматически управлять электроприводом.
11. Система (1) управления по п.1, в которой указанный электропривод имеет три состояния:
- состояние вращения по часовой стрелке,
- состояние вращения против часовой стрелки, и
- состояние покоя.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 4265270 A, 05.05.1981 | |||
| DE 102008029008 A1, 24.12.2009 | |||
| US 3216278 A, 09.11.1965 | |||
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ГАЗОВОГО ПОТОКА | 2002 |
|
RU2216762C1 |

