ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к лазерному прибору с регулируемой поляризацией, сенсорному устройству и оптической системе обнаружения, содержащей такой лазерный прибор. Изобретение дополнительно относится к способу определения трехмерной формы объекта.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
WO 01/05008 A1 раскрывает управление поляризацией лазерного излучения лазеров поверхностного излучения с вертикальным резонатором (VCSEL). Кроме того, описывается изготовление матриц VCSEL-лазеров с контролируемой поляризацией при одинаковой поляризации посредством одномерной решетчатой структуры по всей матрице VCSEL-лазеров на одном этапе обработки. Описанные матрицы не обладают гибкостью, поэтому возможные применения ограничены.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Таким образом, задачей настоящего изобретения является предоставление усовершенствованного лазерного прибора с улучшенной гибкостью.
Согласно первому аспекту предусмотрен лазерный прибор, содержащий матрицу лазерных излучателей и блок управления. Матрица содержит по меньшей мере первую подматрицу лазерных излучателей и вторую подматрицу лазерных излучателей, причем первая подматрица излучает лазерный свет с первой поляризацией, а вторая подматрица излучает лазерный свет со второй поляризацией, отличающейся от первой поляризации. Первая подматрица и/или вторая подматрица содержит подгруппы лазерных излучателей. Блок управления выполнен с возможностью управлять первой подматрицей и второй подматрицей так, что поляризация лазерного света, излучаемого матрицей, может быть управляемой. По меньшей мере лазерный свет, излучаемый первой подгруппой, не является когерентным лазерному свету, излучаемому второй подгруппой. Блок управления дополнительно выполнен с возможностью независимо управлять подгруппами лазерных излучателей первой подматрицы и/или второй подматрицы, так что когерентность излучаемого лазерного света может быть управляемой. Блок управления выполнен с возможностью управлять когерентностью излучаемого лазерного света посредством по меньшей мере первой подгруппы и по меньшей мере второй подгруппы.
Лазерные излучатели предпочтительно представляют собой полупроводниковые лазеры, например лазеры поверхностного излучения с вертикальным резонатором (VCSEL), или боковой излучатель. VCSEL-лазеры могут иметь преимущество в том, что они могут быть произведены на целой пластине так, что матрицы VCSEL-лазеров, излучающих лазерный свет разной поляризации, могут быть получены посредством поверхностной решетки в верхней части светоизлучающей поверхности на каждом VCSEL-лазере. Поверхностные решетки большого числа VCSEL-лазеров могут быть изготовлены на одном этапе травления. Боковые излучатели могут иметь преимущество в том, что они по своей природе поляризованы. Таким образом, никаких дополнительных технических мер не требуется для получения лазерных излучателей заданной поляризации.
Первая подматрица и вторая подматрица могут быть интегрированы на одной микросхеме. Микросхема может содержать первую непрерывную область лазерных приборов, излучающих лазерный свет с первой поляризацией и вторую непрерывную область лазерных приборов, излучающих лазерный свет со второй поляризацией. Микросхема может также содержать три, четыре или более непрерывных областей, содержащих подматрицы лазерных излучателей, излучающих лазерный свет с третьей, четвертой или более поляризацией. При этом также возможно, что две или более подматрицы, обеспеченные на непрерывных областях, излучают лазерный свет с одинаковой поляризацией. Такие непрерывные области могут быть квадратами, прямоугольниками, треугольниками или линиями, или полосами лазерных приборов, излучающих лазерный свет с первой и второй поляризацией.
Альтернативно, подматрицы могут распределяться на одной и той же области микросхемы. Смежные лазерные излучатели могут излучать в данном случае лазерный свет с разной поляризацией. Может быть возможным, что только два разных вида лазерных излучателей, излучающих лазерный свет с разной поляризацией, расположены, например, в шахматном или гексагональном порядке. В альтернативном подходе три, четыре или более лазерных излучателей, излучающих лазерный свет с разной поляризацией, могут быть последовательно расположены в линию в повторяющемся порядке или в две или более линий. Последовательность лазерных излучателей в линиях может быть сдвинута или порядок может быть даже изменен. Схема размещения лазерных излучателей, излучающих лазерный свет с разной поляризацией, может быть при этом регулярной или нерегулярной. Расположение лазерных излучателей, излучающих лазерный свет с разной поляризацией, рядом друг с другом может иметь преимущество в том, что рисунок из лазерных точек с разной поляризацией может быть непосредственно спроецирован на объект без дополнительных оптических элементов. Простое расположение линз может быть достаточным, чтобы расширить такой рисунок из лазерных точек.
Подматрицы лазерных излучателей, излучающих лазерный свет заданной поляризации, альтернативно могут быть расположены на разных микросхемах. Отличающиеся поляризации в этом случае могут быть получены посредством поворота микросхем относительно друг друга, например, на 45, 90, 120° или другие углы в зависимости от числа микросхем или подматриц, используемых в матрице и числа поляризаций, необходимых для соответствующего применения.
Блок управления может управлять подматрицами независимо относительно друг друга. Поляризация лазерного света, излучаемого лазерным прибором может, таким образом, быть непрерывно изменяемой от лазерного света с первой поляризацией (только первая подматрица излучает лазерный свет) до лазерного света без поляризации (обе подматрицы излучают лазерный свет одинаковой интенсивности) до лазерного света со второй поляризацией (только вторая подматрица излучает лазерный свет). Может быть добавлен дополнительный поляризатор под прямым углом, так что поляризация может быть переключаемой между левой и правой круговыми поляризациями. Возможно более сложное управление посредством последовательной связи лазерных приборов каждой подматрицы, позволяющее даже в случае только двух подматриц непрерывно изменять угол поляризации.
Лазерные излучатели подматриц расположены в подгруппах. Подгруппы управляются независимо посредством контроллера. Последний позволяет упрощенное управление лазерным прибором по сравнению с управлением каждого лазерного прибора. Лазерные приборы из подгрупп могут быть когерентно связаны так, что когерентностью лазерного света, излучаемого подматрицами, можно управлять. Подгруппа когерентных лазерных приборов в этом случае может излучать когерентный лазерный свет с заданной поляризацией, в результате чего две или более подгруппы подматрицы излучают некогерентный лазерный свет с заданной поляризацией, если они управляются контроллером, чтобы испускать лазерный свет в одно и то же время.
Несколько подматриц с разной поляризацией позволяют излучать лазерный свет более чем двух поляризаций посредством переключения соответствующей подматрицы контроллером лазерного прибора. Обеспечиваемое питание для каждой подматрицы может быть управляемым непрерывным способом. Кроме того, может быть возможным запитывать только часть лазерных излучателей или даже единственного лазера подматрицы посредством контроллера. Контроллер будет подключен к внешнему источнику питания или внутреннему источнику питания, например, к батарее.
Сенсорное устройство может содержать описанный выше лазерный прибор и детектор. Детектор может быть выполнен с возможностью обнаруживать разные поляризации лазерного света, излучаемого подматрицами после отражения излучаемого лазерного света объектом. Детектор может содержать микросхему камеры, например, прибор с зарядовой связью (ПЗС) и т.п., и поляризационный фильтр. Поляризационный фильтр может быть фиксированным или управляемым посредством модуля управления. Управляемый поляризационный фильтр может позволять регулировку поляризации лазерного света, принимаемого микросхемой камеры автоматически. Также может быть возможным использование детектора без поляризационного фильтра. Модуль управления может в этом случае быть выполнен с возможностью предоставлять лазерный свет с разными поляризациями способом, в котором не требуется поляризационный фильтр. Управляющий сигнал может быть, например, предоставлен посредством лазерного прибора и принят посредством детектора так, что поляризация лазерного света идентифицируется посредством управляющего сигнала. Управляющий сигнал может быть использован совместно в последующей обработке посредством, например, модуля управления датчика или анализирующего блока сенсорного устройства, чтобы идентифицировать соответствующую поляризацию лазерного света. Объект может быть освещенным лазерным светом с изменяющейся поляризацией, и локальные изменения интенсивности отраженного лазерного света в сочетании с информацией о поляризации излучаемого лазерного света позволяют анализировать свойства поверхности объекта.
В альтернативном подходе используются поляризационный расщепитель пучка и две микросхемы камеры. Поляризационный расщепитель пучка может быть выполнен с возможностью передавать лазерный свет с первой поляризацией на первую микросхему камеры и лазерный свет со второй поляризацией на вторую микросхему камеры так, что интенсивности лазерного света двух поляризаций могут быть обнаружены независимо. Лазерный прибор может в этом случае обеспечить только лазерный свет двух разных предпочтительно ортогональных поляризаций. Поляризационный расщепитель пучка может быть расщепителем пучка в сочетании с двумя поляризационными фильтрами с ортогональной поляризацией.
Оптическая система обнаружения может содержать описанный выше лазерный прибор. Оптическая система обнаружения дополнительно содержит приемник и процессорный блок. Процессорный блок может быть любым видом процессора, микропроцессора или компьютера, включающего в себя одно или более запоминающих устройств. Лазерный прибор может быть выполнен с возможностью излучать лазерный свет с рисунком, содержащим по меньшей мере первый фрагмент рисунка лазерного света с первой поляризацией и второй фрагмент рисунка лазерного света со второй поляризацией. Приемник может быть выполнен с возможностью принимать первый и второй фрагменты излучаемого лазерным прибором рисунка (100), отраженные объектом, а процессорный блок может быть выполнен с возможностью определять форму объекта посредством отраженного первого и второго фрагментов рисунка.
Приемник может, например, включать в себя микросхему камеры и поляризационный фильтр заданной поляризации. Процессорный блок может осуществлять связь с блоком управления лазерного прибора. Лазерный прибор может излучать рисунок из точек с разной поляризацией и обмениваться соответствующей информацией с процессорным блоком так, что процессорный блок получает информацию о соответствующем рисунке. Каждый рисунок может содержать уникальный идентификатор, излучаемый посредством лазерного прибора, например, перед излучением рисунка так, чтобы процессорный блок получал информацию, когда соответствующий рисунок принят приемником. Блок управления, таким образом, может быть выполнен с возможностью изменения рисунка. Процессорное устройство, таким образом, может быть выполнено с возможностью определения формы объекта посредством сравнения информации об излучаемом рисунке с принятым рисунком, на основе большого числа разных рисунков.
Детектор может содержать в альтернативном подходе детектор с управляемым поляризационным фильтром. Лазерный прибор может излучать в этом случае постоянный рисунок, и модуль управления может изменять настройки управляемого поляризационного фильтра так, что лазерный свет с разной поляризацией может передавать управляемую поляризацию в разное время. Информация об излучаемом рисунке, искажение принимаемого рисунка и интенсивность точек рисунка относительно настройки управляемого поляризационного фильтра могут быть использованы процессорным блоком для определения формы объекта.
Оптическая система обнаружения может дополнительно содержать камеру для записи изображения объекта. Процессорный блок может быть выполнен с возможностью определять трехмерное изображение объекта на основе определенной формы объекта и изображения объекта. Информация, представленная посредством обычной камеры, может быть объединена с определенной формой объекта. Таким образом, возможно обеспечение реалистичного трехмерного изображения объекта. Кроме того, использование поляризационного фильтра перед приемником уменьшает интенсивность окружающего света на 50%, так что контрастность изображения может быть улучшена. Рисунок предпочтительно излучается на разной длине волны как изображение (например, инфракрасный спектр по сравнению с видимой областью спектра, записанного камерой), так что рисунок из лазерного света не может нарушить запись изображения посредством камеры.
Согласно еще одному аспекту настоящего изобретения предусмотрен способ определения формы объекта. Способ включает в себя этапы, на которых:
- излучают лазерный свет с рисунком, содержащим по меньшей мере первый фрагмент рисунка лазерного света с первой поляризацией и второй фрагмент рисунка лазерного света со второй поляризацией;
- управляют посредством блока управления когерентностью лазерного света с помощью независимого управления подгруппами лазерных излучателей первой подматрицы и/или второй подматрицы, при этом по меньшей мере лазерный свет, излучаемый первой подгруппой, не является когерентным лазерному свету, излучаемому второй подгруппой;
- принимают отраженный объектом лазерный свет с упомянутым рисунком; и
- определяют форму объекта, используя принятый лазерный свет первого и второго фрагментов рисунка.
Информация, обеспеченная посредством первого и второго фрагментов рисунка, может улучшить определение формы объекта, предоставляя дополнительную информацию с помощью отличающихся поляризаций лазерного света в фрагменте рисунка.
Способ может содержать дополнительный этап обеспечения лазерного света с упомянутым рисунком, причем рисунок изменяется во времени, и обеспечения информации об этом изменении процессорному блоку так, что форма объекта определяется на основе этой информации.
В альтернативном подходе способ содержит этап изменения настройки контролируемого поляризационного фильтра так, что лазерный свет с отличающейся поляризацией может быть отфильтрован для обеспечения дополнительной информации об объекте.
Следует понимать, что предпочтительный вариант осуществления изобретения также может быть любой комбинацией зависимых пунктов формулы изобретения с соответствующим независимым пунктом.
Ниже описаны другие предпочтительные варианты осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты изобретения будут очевидны и объяснены со ссылкой на описанные ниже варианты осуществления.
Изобретение теперь будет описано в качестве примера на основе вариантов осуществления со ссылкой на прилагаемые чертежи, где:
на Фиг. 1 приведена принципиальная схема первого лазерного прибора.
Фиг. 2 - принципиальная схема первой матрицы лазеров.
Фиг. 3 - принципиальная схема второй матрицы лазеров.
Фиг. 4 - принципиальная схема второго лазерного прибора.
Фиг. 5 - принципиальная схема сенсорного устройства.
Фиг. 6 - принципиальная схема оптической системы обнаружения.
Фиг. 7 - принципиальная схема объекта, освещенного посредством рисунка из линий лазерного света с различной поляризацией.
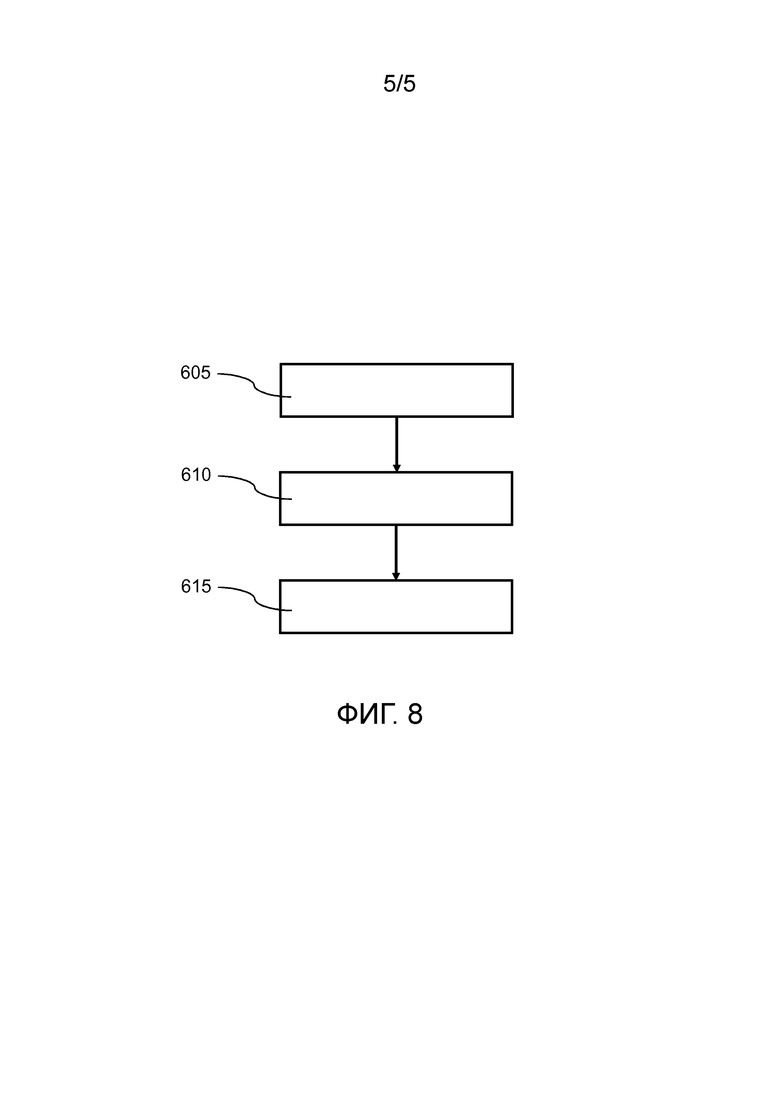
Фиг. 8 - принципиальная схема способа определения формы объекта.
На чертежах одинаковые ссылочные позиции относятся к одинаковым объектам повсюду. Объекты на чертежах необязательно представлены в масштабе.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Различные варианты осуществления изобретения теперь будут описаны посредством чертежей.
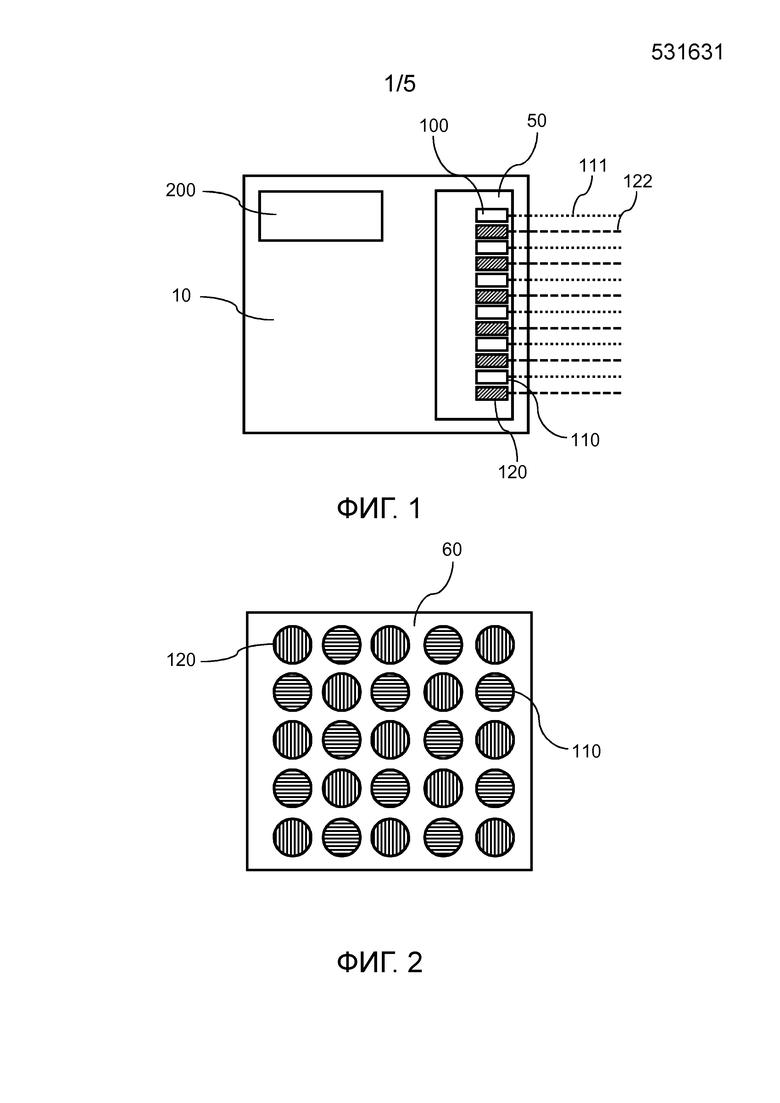
Фиг. 1 показывает принципиальную схему первого лазерного прибора 10. Лазерный прибор 10 содержит блок 200 управления и матрицу 50 лазерных излучателей 100. Лазерные излучатели 100 расположены в первой подматрице лазерных излучателей 110, излучающих лазерный свет с первой поляризацией 111, и во второй подматрице лазерных излучателей 120, излучающих лазерный свет со второй поляризацией 122. Лазерные излучатели 100 представляют собой, например, лазеры поверхностного излучения с вертикальным резонатором (VCSEL-лазеры) с решеткой, предусмотренной на светоизлучающей поверхности VCSEL-лазеров для установления поляризации лазерного света, излучаемого соответствующим VCSEL-лазером. Блок 200 управления, микропроцессор или т.п. выполнены с возможностью независимо управлять первой и второй подматрицей лазерных излучателей 110, 120. Первая подматрица лазерных излучателей 110 может быть, например, запитана в момент времени t1, когда вторая подматрица лазерных излучателей 120 не запитана. Во время t2 после t1 запитывается вторая подматрица лазерных излучателей 120, когда первая подматрица лазерных излучателей 110 не запитана. Блок управления также может быть выполнен с возможностью запитывать каждую из первой и второй подматриц лазерных излучателей 110, 120 на каждом промежуточном уровне мощности между нулевой мощностью и полной мощностью. Кроме того, обе подматрицы могут быть запитаны одновременно. Состоянием поляризации излучаемого лазерного света 111, 122, таким образом, можно управлять в непрерывном режиме.
Фиг. 2 показывает микросхему 60, на которой расположены и прикреплены VCSEL-лазеры 100 из матрицы 50 лазеров. Первая и вторая подматрицы лазерных излучателей 110, 120 расположены в шахматном порядке и излучают лазерный свет с первой поляризацией 111 и лазерный свет со второй поляризацией 122, перпендикулярной или ортогональной к первой поляризации. Шахматная схема расположения также как, например, гексагональная схема расположения или тому подобное, может иметь преимущество в том, что для того, чтобы перекрыть излучение соответствующей подматрицы, не требуется оптический элемент. Поскольку отдельные VCSEL-лазеры в матрице 50 связаны некогерентно, то поляризация излучения матрицы может быть изменена только между поляризованным в двух ортогональных направлениях поляризации и неполяризованным излучением при варьировании степени поляризации. Дополнительный поляризатор может быть добавлен под прямым углом, так что поляризация может быть переключаемой между левой и правой круговыми поляризациями. Дополнительные меры для того, чтобы когерентно связать излучение всех элементов в матрице 50, которые излучают с одинаковой поляризацией, будут позволять непрерывное изменение угла поляризации. Такие меры когерентного связывания VCSEL-лазеров описаны, например, в J. Baier, U. Weichmann, Extended cavity semiconductor laser device with increased intensity, US 2010/0265975 A1.
Альтернативно более двух подматриц может быть расположено на микросхеме 60, если смежные лазерные излучатели 100 должны излучать лазерный свет с отличающейся поляризацией. Поляризация лазерных излучателей 100 может, например, изменяться ступенчато на 120° в случае трех подматриц, при этом в случае четырех подматриц поляризация может изменяться на 45°. Таким образом, возможно большое число различных состояний поляризации. Может быть даже возможным наличие нерегулярной структуры лазерных излучателей 100 с разной поляризацией. Последнее может быть легко осуществимо посредством VCSEL-лазеров, производимых в процессе обработки пластины, так что только одна маска необходима для того, чтобы задать поляризацию лазерного света, излучаемого каждым VCSEL-лазером, обеспечивая различные поверхностные дифракционные решетки на одном этапе травления. Поляризация подматриц может быть сохранена в запоминающем устройстве блока 200 управления или может быть определена с помощью подходящего детектора, принимающего только лазерный свет заданного состояния поляризации в процедуре калибровки. Лазерный свет, излучаемый лазерными излучателями 100 матрицы 50, может управляться посредством подходящих оптических элементов. Линза, например, может быть использована для расширения луча излучаемого лазерного света. Зеркала могут быть использованы для изменения направления полного луча или частей луча.
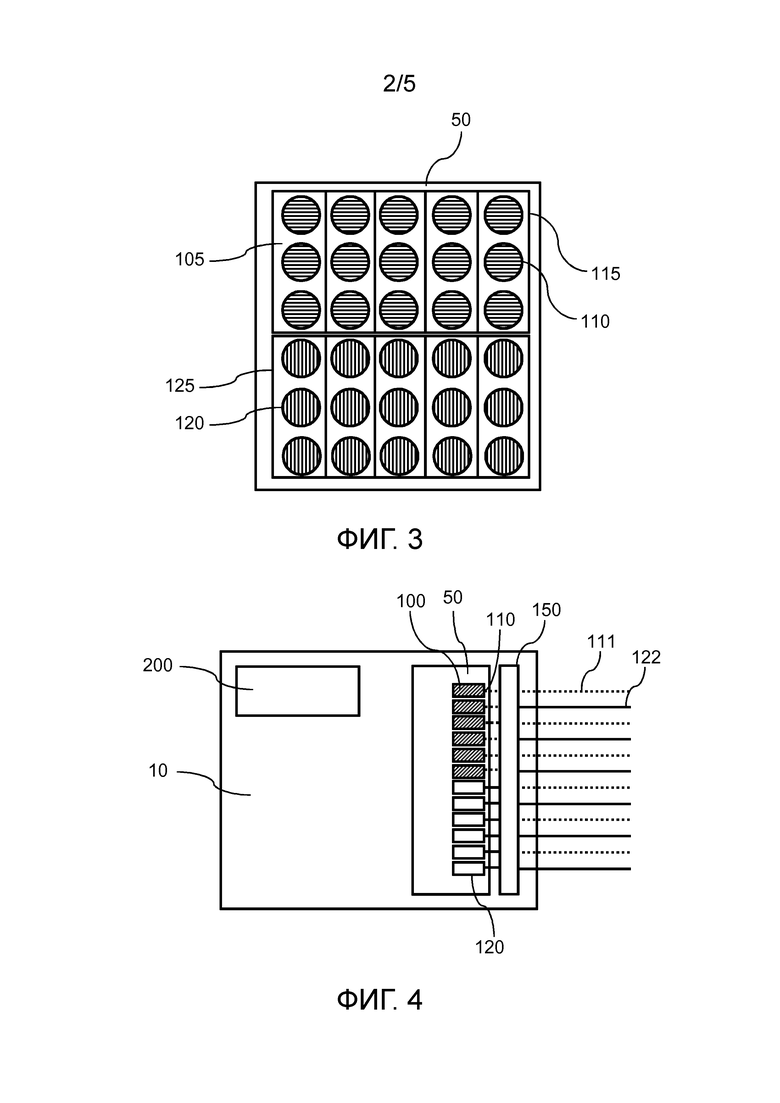
Фиг. 3 показывает альтернативное расположение лазерных излучателей 100 в матрице 50. Изображены первая микросхема 115, содержащая 5 подгрупп лазерных излучателей 105, излучающих лазерный свет с первой поляризацией, и вторая микросхема 125, содержащая 5 подгрупп лазерных излучателей 105, излучающих лазерный свет со второй поляризацией. Каждая подгруппа лазерных излучателей 105 может быть задействована независимо. Число лазерных излучателей 100 в подгруппе и число подгрупп на поляризацию могут определять степень управления в отношении поляризации лазерного света, излучаемого посредством матрицы 50 в случае, если подгруппы могут быть только включены и выключены. Последнее может ограничить сложность блока 200 управления, необходимого для управления матрицей 50. Непрерывное управление может быть возможным, если можно непрерывным способом управлять питанием, подводимым к каждой подгруппе лазерных излучателей 105. Лазерные излучатели 100 в этом случае представляют собой лазерные диоды с торцевым излучением, излучающие поляризованный лазерный свет. 15 лазеров с торцевым излучением расположены на первой микросхеме 115, а дополнительные 15 - на второй микросхеме 125, а также выровнены по отношению к поляризации лазерного излучения, излучаемого с помощью лазера с торцевым излучением. Поляризации лазерного света, излучаемого с помощью лазерных излучателей 100, расположенных на второй микросхеме, повернуты на 90° посредством поворота лазеров с торцевым излучением на 90° по сравнению с лазерами с торцевым излучением, прикрепленными к первой микросхеме 115. Альтернативно, лазерные излучатели могут быть расположены таким же образом по отношению к поляризации, излучаемой на каждой подматрице лазерных излучателей 110, 120. Последнее означает, что поляризация излучаемого лазерного света по отношению к длинной стороне первой или второй микросхем 115, 125 может быть той же самой. Поляризация излучаемого лазерного света может быть повернута посредством поворота первой и второй микросхем 115, 125 относительно друг друга. В этом случае для расположения подматриц может быть использована форма микросхем. Микросхемы с лазерными излучателями 100 с формой равностороннего треугольника могут быть использованы для обеспечения лазерного света трех различных поляризаций простым способом, просто повернув микросхемы на подходящей плате. Форма микросхем может определять число возможных поляризаций излучаемого лазерного света. Альтернативно, представляется возможным обеспечить микросхемы с квадратичной или круговой поляризацией и расположить эти микросхемы на плате или основной микросхеме для того, чтобы обеспечить настолько отличающиеся поляризации излучаемого лазерного света, насколько это необходимо для соответствующей цели. Размер и число лазерных излучателей 100 в матрице 50, подматрице 110, 120 или подгруппе 105 могут быть использованы для управления когерентностью излучаемого лазерного света. Только когерентно связанные лазерные излучатели 100 излучают когерентный лазерный свет. Когерентностью можно таким образом управлять с помощью блока 200 управления посредством использования подгрупп 105 или подматриц, которые связаны некогерентно. Это может быть даже выгодно для объединения одиночных лазерных излучателей 100 в матрицу 50, которые связаны некогерентно.
Фиг. 4 показывает лазерный прибор 10, содержащий матрицу 50, изображенный на Фиг. 3. Блок 200 управления управляет каждой подгруппой лазерных излучателей 105, просто включая или выключая подгруппу. Лазерный прибор 10 дополнительно содержит оптическое устройство 150 для наложения лазерных излучений, излучаемых первой и второй подматрицей лазерных излучателей 110, 120. Оптическое устройство 150 может содержать два дифракционных элемента для обеспечения, например, наложенного рисунка с шахматной схемой расположения лазерных пятен с чередующейся поляризацией лазерного света. Альтернативно, расположения зеркал, полупрозрачных зеркал и линз могут быть использованы для обеспечения подобных рисунков.
Проекционные линзы могут быть использованы в дополнение или альтернативно для обеспечения рисунка из линий с разной поляризацией лазерного света смежных линий. Линии могут быть спроецированы в вертикальном или горизонтальном направлении относительно исходной поверхности. Проекционные линзы и/или дополнительные оптические элементы могут быть даже переключаемыми так, что, например, упомянутый рисунок из линий может быть переключаемым между вертикалью и горизонталью. Кроме того, более сложные рисунки и переключаемые состояния могут быть возможны посредством подходящих оптических устройств 150. Переключение оптического устройства 150 может управляться посредством блока 200 управления. Альтернативно, дополнительное управляющее устройство может быть использовано для управления переключением оптического устройства 150. Оптические устройства 150, раскрытые в рамках варианта осуществления, показанного на Фиг. 4, могут также быть использованы для того, чтобы позволить переключение упомянутого рисунка лазерных лучей, излучаемых посредством лазерного прибора 10, показанного на Фиг. 1.
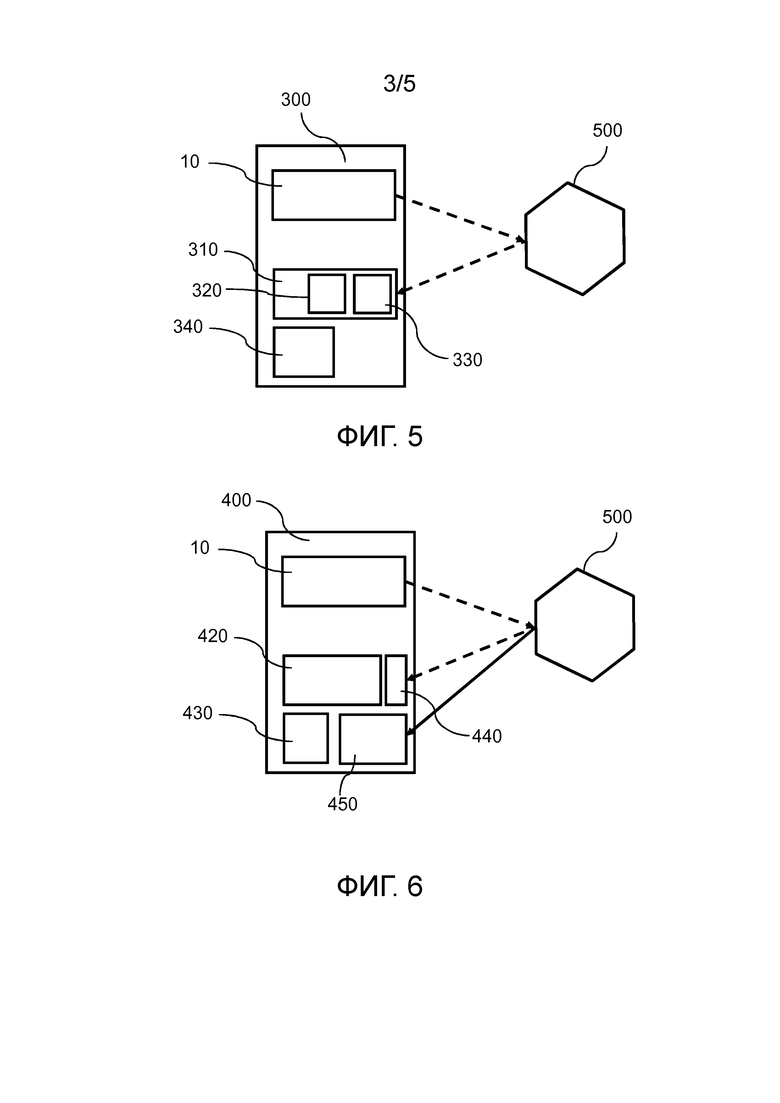
Фиг. 5 показывает принципиальную схему сенсорного устройства 300 в соответствии с вариантом осуществления настоящего изобретения. Сенсорное устройство 300 содержит лазерный прибор 10, такой как, например, описанный выше. Лазерный прибор 10 излучает лазерный свет с первой поляризацией и второй поляризацией, перпендикулярной к первой поляризации. Лазерный свет отражается объектом 500 и принимается посредством микросхемы 320 камеры после прохождения регулируемого поляризационного фильтра 330. Микросхема 320 камеры и поляризационный фильтр 330 являются частью детектора 310. Модуль 340 управления управляет детектором 320 и содержит запоминающее устройство (не показано) для сохранения результатов измерений, принятых посредством детектора 310. Поляризация лазерного света, проходящего поляризационный фильтр, может быть, например, отрегулирована посредством модуля 340 управления.
Модуль 340 управления может в альтернативном подходе быть выполнен с возможностью управления лазерным прибором 10. Это можно сделать с помощью блока 200 управления лазерного прибора 10. Блок 200 управления может в этом случае быть вызван посредством модуля 340 управления. Модуль 340 управления может управлять лазерным прибором 10 так, что лазерный прибор 10 излучает лазерный свет с первой поляризацией в момент времени t1 и лазерный свет со второй поляризацией в последующий момент времени t2. Модуль 340 управления может знать, в этом случае, когда излучается лазерный свет с заданной поляризацией, и может быть вычислено время, когда соответствующий лазерный свет принимается посредством детектора, если известно расстояние до объекта 500. Расстояние до объекта 500 может быть фиксированным в некоторых применениях сенсорного устройства 300, но в других применениях может быть необходимым измерение расстояния. Такие измерения расстояния могут, например, быть выполнены посредством измерения времени пролета или лазерного самосмешивания с использованием подходящего датчика расстояния (не показан), который может управляться посредством модуля 340 управления. В таких случаях поляризационный фильтр 330 может быть лишним. Модуль 340 управления определяет поляризацию лазерного света на основе времени излучения лазерного света с заданной поляризацией и времени приема соответствующего лазерного света на основе известного расстояния. Может быть даже возможным отказ от датчика расстояния в случае неизвестного расстояния. Модуль 340 управления может, например, излучать уникальную последовательность лазерных импульсов, специфичных для каждой поляризации лазерного света, излучаемого лазерным прибором 10. Детектор 310 определяет соответствующую поляризацию принятого лазерного света, посредством последовательности лазерных импульсов, так что ни поляризационный фильтр 330, ни сведенья о расстоянии до объекта 50 могут быть не нужны. Этот подход идентификации измерительного луча лазерного света может быть использован в каждом случае, когда излучаемый лазерный свет характеризуется известным способом как, например, заданной поляризацией, описанной выше, или заданной когерентностью. Модуль 340 управления и блок 200 управления могут быть даже одним устройством, управляющим как лазерным прибором 10, так и детектором 310. Сенсорное устройство 300 может дополнительно содержать оптические элементы и/или механические элементы, которые выполнены с возможностью направлять или фокусировать лазерный свет на объект 500. Лазерный прибор 10 и/или детектор 310 могут, например, быть вращаемыми вокруг одной или более осей.
Сенсорное устройство 300 может использоваться в биосенсорных применениях таких как, например, портативная диагностика. Этот биосенсор дает простой способ переключения между светло- и темнопольным обнаружением. Отраженный свет вследствие одной поляризации приводит к сигналу (светлое поле), в то время как другая поляризация не будет приводить ни к какому сигналу (темное поле). Частицы на поверхности будут рассеивать лазерный свет, излучаемый лазерным прибором 10, и изменять поляризацию лазерного света, так что они будут смотреться как "темные пятна" в светлопольном обнаружении и как сигнал в темнопольном обнаружении. Таким образом, оба способа обнаружения могут быть использованы, и достигнута высокая чувствительность.
Многие другие примеры потенциальных применений для сенсорного устройства 300 могут быть найдены в областях спектроскопии и сенсорного обнаружения. Способность простого переключения между светлопольным обнаружением и темнопольным обнаружением может быть использована для повышения чувствительности этих применений. Другой областью применения для таких сенсорных устройств 300 является фотохимия, где можно управлять различными химическими реакциями посредством изменения поляризации возбуждения.
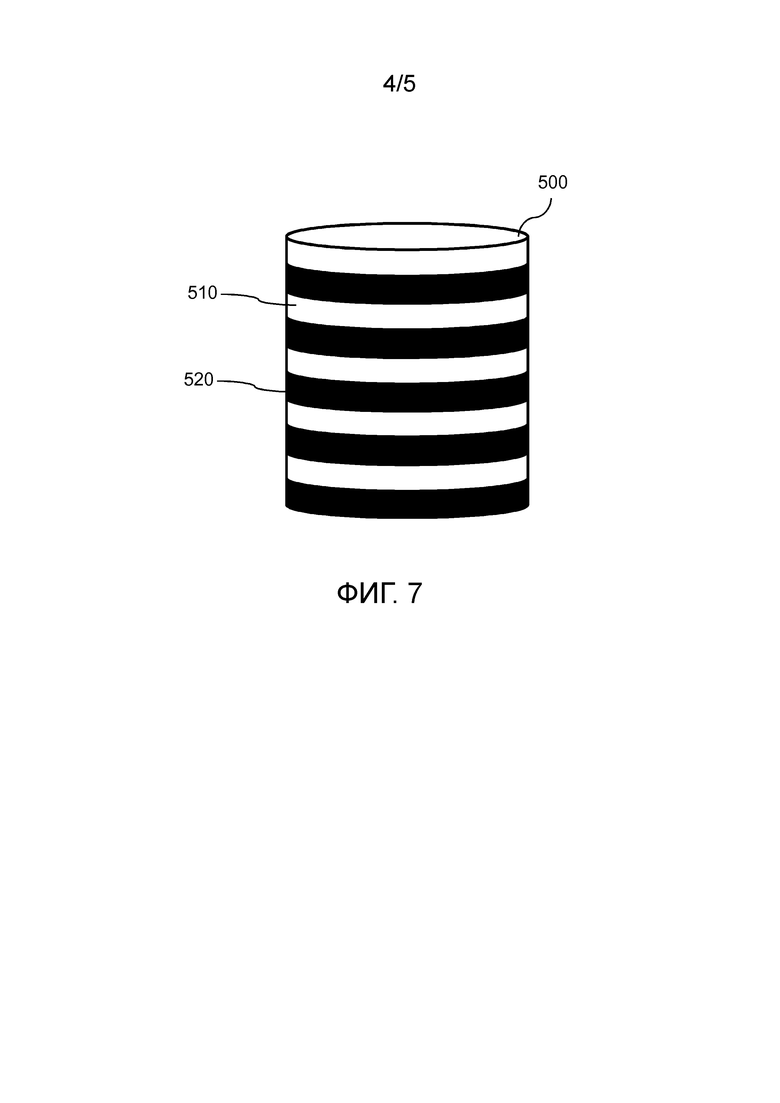
Фиг. 6 показывает принципиальную схему оптической системы 400 обнаружения. Оптическая система 400 обнаружения содержит лазерный прибор 10, излучающий рисунок из лазерного света с разными поляризациями. Рисунок может быть линейным рисунком с чередующимися линиями из лазерного света разной поляризации, как показано на Фиг. 7. Фиг. 7 показывает цилиндр, освещенный посредством лазерного прибора 10 с использованием линейного рисунка. Первый фрагмент рисунка 510 включает в себя лазерный свет с первой поляризацией, параллельной поверхности объекта 500, размещенного на ней, и фрагмент рисунка 520 из лазерного света со второй поляризацией, ортогональной к поверхности объекта 500, размещенного на ней.
В качестве альтернативы, точечный рисунок из лазерных пятен, имеющих разные поляризации, относительно соседних лазерных пятен, может излучаться посредством лазерного прибора 10. Рисунок может быть регулярным или нерегулярным. Оптическая система 400 обнаружения дополнительно содержит приемник 420, такой как, например, микросхема камеры для приема лазерного света, отраженного объектом 500 и управляемого поляризатором 440. Управляемый поляризатор 440 переключается посредством процессорного блока 430 между разными поляризациями лазерного света, излучаемого лазерным прибором 10. Процессорный блок 430 может быть использован для управления лазерным прибором 10, приемником 420 и управляемым поляризатором 440 так же или подобно тому, как описано по отношению к сенсорному устройству, описанному выше. Процессорный блок 400 дополнительно может быть выполнен с возможностью определять трехмерную форму объекта 500 на основе искажения рисунка, вызванного формой объекта 500. Поляризация лазерного света используется для улучшения уникальности излучаемого рисунка. Это может позволить улучшенное обнаружение трехмерных объектов по сравнению с известными подходами, использующими структурированный свет для трехмерного обнаружения посредством триангуляции, потому что разная поляризация добавляет дополнительную информацию к рисунку. Особенно, изменение рисунков, например, вертикальных и параллельных линий разной поляризации в последовательном порядке, может улучшить обнаружение благодаря предоставлению информации о форме объекта 500 в горизонтальном и вертикальном направлениях. Используя поляризованное излучение можно увеличить контрастность, потому что излучение с поляризацией, которая блокирована регулируемым поляризационным фильтром 440, не мешает измерению.
Кроме того, известные, но чрезвычайно уникальные рисунки с большим числом разных поляризаций, как обсуждалось выше, могут быть спроецированы на трехмерный объект. Различные пятна заданной поляризации могут быть обнаружены с помощью приемника 420 после прохождения регулируемого поляризационного фильтра 440. Если используется более чем две поляризации, то интенсивность принимаемого лазерного света может быть использована в качестве дополнительной информации, так как только определенная часть отраженного лазерного света с поляризацией, не параллельной регулируемому поляризационному фильтру 440, проходит регулируемый поляризационный фильтр 440 и принимается посредством приемника 420. Также затем возможна последовательная отправка фрагментов рисунков лазерного света с двумя или более поляризациями посредством управления лазерными излучателями 100, подгруппами лазерных излучателей 105 или подматрицами соответственно. Процессорное устройство 430 может обрабатывать рисунки, принятые приемником 420, так что даже может быть определена форма движущегося объекта 500. Таким образом, может быть обеспечен трехмерный фильм движущегося объекта 500.
Оптическое устройство обнаружения, показанное на Фиг. 5, дополнительно содержит оптическую камеру 450 для приема обычного изображения объекта 500. Лазерный прибор 10 может содержать лазерные излучатели 100, такие как VCSEL-лазеры, излучающие лазерный свет в инфракрасной области спектра. Лазерный рисунок, таким образом, не мешает записывать обычное изображение посредством камеры 450. Кроме того, окружающее освещение, отраженное объектом 500 и проходящее управляемый поляризационный фильтр 440, затухает на 50%, при этом лазерный свет на одной линии при использовании управляемого поляризационного фильтра 440 проходит фильтр без затухания. Контрастность принятого рисунка по отношению к окружающему освещению, таким образом, может быть улучшена. Кроме того, спектральный фильтр может быть добавлен к приемнику 420, так что окружающее освещение вне спектрального диапазона лазерных излучателей 100 не вносит вклад в сигнал, принятый посредством приемника 420. Использование VCSEL-лазера в качестве лазерных излучателей 100 может иметь дополнительные преимущества, так что форма апертуры соседних VCSEL-лазеров может быть различной, используя соответствующую маску травления в процессе производства. Апертура VCSEL-лазеров влияет на форму проецируемых лазерных точек, так что это дополнительное измерение может быть использовано для добавления дополнительной информации к лазерному свету с рисунком.
Фиг. 8 показывает принципиальную схему способа определения формы объекта 500. На этапе 605 обеспечивают лазерный свет с рисунком, содержащим по меньшей мере первый фрагмент рисунка лазерного света с первой поляризацией 510 и второй фрагмент рисунка лазерного света со второй поляризацией 520. На этапе 610 принимают отраженный объектом 500 лазерный свет с упомянутым рисунком. На этапе 615 определяют форму объекта 500 на основе принятого лазерного света.
В то время как изобретение было проиллюстрировано и подробно описано на чертежах и вышеизложенном описании такие иллюстрации и описание следует считать иллюстративными или примерными и не ограничивающими его.
Из прочтения существующего раскрытия для специалистов в области техники будут очевидны другие модификации. Такие модификации могут содержать другие функции, которые уже известны в области техники и которые могут быть использованы вместо или в дополнение к уже описанным здесь функциям.
Изменения к раскрытым вариантам осуществления могут быть поняты и осуществлены специалистами в области техники при изучении чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения слово "содержащее" не исключает другие элементы или этапы, и а единственное число не исключает множественности элементов или этапов. Тот факт, что определенные меры перечислены во взаимно различных зависимых пунктах формулы изобретения не означает, что комбинация этих мер не может быть использована с пользой.
Любые ссылочные обозначения в формуле изобретения не должны быть истолкованы как ограничивающие ее объем.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
10 Лазерный прибор
50 Матрица
60 Микросхема
100 Лазерные излучатели
105 Подгруппа лазерных излучателей
110 Первая подматрица лазерных излучателей
111 Лазерное излучение с первой поляризацией
115 Первая микросхема
120 Вторая подматрица лазерных излучателей
122 Лазерное излучение со второй поляризацией
125 Вторая микросхема
150 Оптическое устройство
200 Блок управления
300 Сенсорное устройство
310 Детектор
320 Микросхема камеры
330 Поляризационный фильтр
340 Модуль управления
400 Оптическая система обнаружения
420 Приемник
430 Процессорный блок
450 Камера
440 Регулируемый поляризационный фильтр
500 Объект
605 Этап излучения лазерного света с рисунком
610 Этап приема отраженного объектом лазерного света с упомянутым рисунком
615 Этап определения формы объекта
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ДАТЧИК ДЛЯ ОБНАРУЖЕНИЯ НЕСКОЛЬКИХ ПАРАМЕТРОВ | 2016 |
|
RU2717751C2 |
| УСТРОЙСТВО ИНФРАКРАСНОГО ЛАЗЕРНОГО ОСВЕЩЕНИЯ | 2016 |
|
RU2672767C1 |
| МОДУЛЬ ЛАЗЕРНОГО ДАТЧИКА | 2015 |
|
RU2696335C2 |
| СИСТЕМА ЛАЗЕРНОЙ ПЕЧАТИ | 2014 |
|
RU2656205C1 |
| ЛАЗЕР С ВЕРТИКАЛЬНЫМ РЕЗОНАТОРОМ И ПОВЕРХНОСТНЫМ ИЗЛУЧЕНИЕМ | 2015 |
|
RU2645805C1 |
| ЛАЗЕРНЫЙ ПРИБОР ДЛЯ ПРОЕЦИРОВАНИЯ СТРУКТУРИРОВАННОЙ КАРТИНЫ ОСВЕЩЕНИЯ НА СЦЕНУ | 2013 |
|
RU2655475C2 |
| Устройство идентификации вен ладони пользователя | 2021 |
|
RU2772040C1 |
| НАГРЕВАТЕЛЬНАЯ СИСТЕМА, СОДЕРЖАЩАЯ ПОЛУПРОВОДНИКОВЫЕ ИСТОЧНИКИ СВЕТА | 2015 |
|
RU2669549C2 |
| ЛАЗЕРНЫЙ ПРИБОР С ВНУТРЕННЕ ПРИСУЩЕЙ БЕЗОПАСНОСТЬЮ, СОДЕРЖАЩИЙ ЛАЗЕР ПОВЕРХНОСТНОГО ИЗЛУЧЕНИЯ С ВЕРТИКАЛЬНЫМ РЕЗОНАТОРОМ | 2018 |
|
RU2723143C1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
Изобретение относится к лазерному прибору с регулируемой поляризацией. Лазерный прибор (10) содержит матрицу (50) лазерных излучателей (100) и блок (200) управления. Матрица (50) содержит по меньшей мере первую подматрицу (110) лазерных излучателей и вторую подматрицу (120) лазерных излучателей. Первая подматрица (110) излучает лазерный свет с первой поляризацией, а вторая подматрица (120) излучает лазерный свет со второй поляризацией (122). Блок (200) управления выполнен с возможностью управлять первой подматрицей (110) и второй подматрицей (120) так, что поляризация лазерного света, излучаемого матрицей (50), может быть изменена. Изобретение позволяет повысить эффективность определения трехмерной формы объектов. 4 н. и 9 з.п. ф-лы, 8 ил.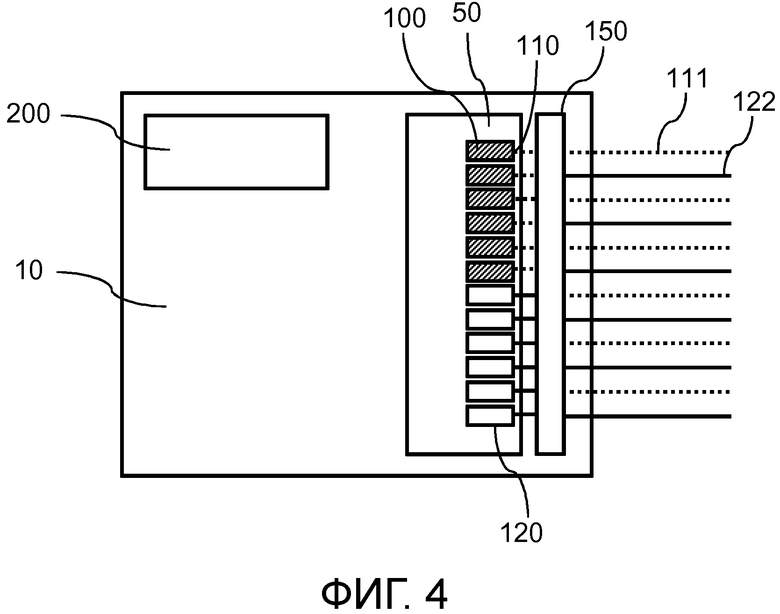
1. Лазерный прибор (10), содержащий матрицу (50) лазерных излучателей (100) и блок (200) управления, причем матрица (50) содержит по меньшей мере первую подматрицу (110) лазерных излучателей и вторую подматрицу (120) лазерных излучателей, причем первая подматрица (110) излучает лазерный свет с первой поляризацией (111), а вторая подматрица (120) излучает лазерный свет со второй поляризацией (122), отличающейся от первой поляризации, при этом первая подматрица (110) и/или вторая подматрица (120) содержит подгруппы (105) лазерных излучателей (100), а блок (200) управления выполнен с возможностью управлять первой подматрицей (110) и второй подматрицей (120) так, что поляризация лазерного света, излучаемого матрицей (50), может быть изменена, отличающийся тем, что блок (200) управления дополнительно выполнен с возможностью независимо управлять подгруппами (105) лазерных излучателей (100) первой подматрицы (110) и/или второй подматрицы (120), и причем по меньшей мере лазерный свет, излучаемый первой подгруппой (105), не является когерентным лазерному свету, излучаемому второй подгруппой (105), и при этом блок (200) управления выполнен с возможностью управлять когерентностью лазерного света, излучаемого лазерным прибором посредством по меньшей мере первой подгруппы (105) и по меньшей мере второй подгруппы (105).
2. Лазерный прибор (10) по п. 1, причем лазерные излучатели (100) представляют собой лазеры поверхностного излучения с вертикальным резонатором, содержащие решетки для излучения поляризованного лазерного света.
3. Лазерный прибор (10) по п. 2, причем первая подматрица (110) и вторая подматрица (120) интегрированы на одной микросхеме (60).
4. Лазерный прибор (10) по п. 1 или 2, причем первая подматрица (110) расположена на первой микросхеме (115), а вторая подматрица (120) расположена на второй микросхеме (125).
5. Лазерный прибор (10) по п.3, причем лазерный излучатель (100) первой подматрицы (110) и лазерный излучатель второй подматрицы (120) расположены в шахматном или гексагональном порядке.
6. Лазерный прибор (10) по п.1 или 2, причем матрица (50) содержит множество подматриц (110, 120), причем каждая подматрица (110, 120) излучает лазерный свет отличающейся поляризации, и при этом блок управления (200) выполнен с возможностью независимо управлять каждой подматрицей (110, 120).
7. Сенсорное устройство (300), содержащее лазерный прибор (10) по любому из пп. 1-6 и детектор (310), выполненный с возможностью обнаруживать отличающиеся поляризации лазерного света, излучаемого подматрицами (110, 120) и отраженного объектом (500).
8. Сенсорное устройство (300) по п.7, причем детектор (310) содержит микросхему (320) камеры и поляризационный фильтр (330).
9. Сенсорное устройство (300) по п.8, причем поляризационный фильтр (330) представляет собой управляемый поляризационный фильтр и причем детектор содержит модуль (340) управления, выполненный с возможностью управлять поляризационным фильтром (330) так, что поляризация лазерного света, принимаемого камерой (320), может быть регулируемой автоматически.
10. Оптическая система (400) обнаружения, содержащая лазерный прибор (10) по любому из пп.1-6, приемник (420) и процессорный блок (430), при этом лазерный прибор (10) выполнен с возможностью излучать лазерный свет с рисунком, содержащим по меньшей мере первый фрагмент рисунка лазерного света с первой поляризацией (510) и второй фрагмент рисунка лазерного света со второй поляризацией (520), приемник (420) выполнен с возможностью принимать первый и второй фрагменты излучаемого лазерным прибором (100) рисунка, отраженные объектом (500), а процессорный блок (430) выполнен с возможностью определять форму объекта (500) посредством отраженных первого и второго фрагментов рисунка.
11. Оптическая система обнаружения по п.10, дополнительно содержащая управляемый поляризационный фильтр (440), и процессорный блок (430) выполнен с возможностью управлять поляризацией лазерного света, принимаемого приемником (420), посредством управляемого поляризационного фильтра (440).
12. Оптическая система обнаружения (400) по п.10, дополнительно содержащая камеру (450) для записи изображения объекта (500), при этом процессорный блок (450) выполнен с возможностью определять трехмерное изображение объекта на основе определенной формы объекта (500) и изображения объекта (500).
13. Способ определения формы объекта (500), содержащий этапы, на которых:
- излучают лазерный свет с рисунком, содержащим по меньшей мере первый фрагмент рисунка лазерного света с первой поляризацией (510) и второй фрагмент рисунка лазерного света со второй поляризацией (520);
- управляют посредством блока управления когерентностью лазерного света с помощью независимого управления подгруппами (105) лазерных излучателей (100) первой подматрицы (110) и/или второй подматрицы (120), при этом по меньшей мере лазерный свет, излучаемый первой подгруппой (105), не является когерентным лазерному свету, излучаемому второй подгруппой (105);
- принимают отраженный объектом (500) лазерный свет с упомянутым рисунком; и
- определяют форму объекта (500), используя принятый лазерный свет первого и второго фрагментов рисунка (510, 520).
| US 2010226402 A1, 09.09.2010 | |||
| EP 1394500 A1, 03.03.2004 | |||
| Состав для получения антифрикционных покрытий | 1976 |
|
SU553266A2 |

