ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к устройству, системе и способу для приведения в движение уборочного комбайна с аккумуляторным электрическим гибридным приводом.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Нагрузка двигателя на двигателе внутреннего сгорания в уборочном комбайне или «комбайне» может возрастать по мере того, как повышается густота или урожайность растительности в определенных зонах на поле. Двигатели внутреннего сгорания («IC») используются для приведения в действие комбайнов в широком многообразии условий нагрузки и должны быть способны допускать резкие изменения нагрузки. Когда комбайн находится в режиме транспортировки, резкие увеличения мощности и крутящего момента требуются от двигателя при преодолении препятствий местности между полями. Обработка почвы в поле также представляет условия, где есть резкие повышения нагрузки, обусловленные изменениями грунтовых условий, где сопротивление почвообрабатывающего орудия значительно повышается, или поле имеет крутые уклоны. Ожидается, что двигатели этого типа должны реагировать на эти условия повышением крутящего момента на выходном валу всего лишь небольшим повышением нагрузки двигателя. Это повышение выходного крутящего момента типично указывается ссылкой как подъем крутящего момента. Двигатели со значительным подъемом крутящего момента дают кривой крутящего момента возможность формироваться так, чтобы скорость подъема была непомерно высокой, предоставляя двигателю возможность очень незначительно понижать число оборотов в минуту, причем одновременно очень значительно возрастает крутящий момент на выходном валу. Управляемые двигатели используют форму кривой регулятора-ограничителя, чтобы формировать крутизну крайне крутой для работы на или ниже номинальных числа оборотов в минуту и крутящего момента.
Уборочные комбайны на данный момент имеют базовую кривую крутящего момента двигателя, чтобы выдавать паспортную номинальную мощность на уровне мощности приблизительно на 14% ниже огибающей способности по мощности двигателя. Испытание показало, что выброс мощности в 14% с падением частоты вращения двигателя на 200 оборотов в минуту дает хорошую способность выволакивания массы и улучшенную управляемость для водителя. Это дает возможность использования подъема мощности для разгрузки или выброса мощности, чтобы дополнительная мощность справлялась с постепенными повышениями нагрузки или справлялась с выволакиваемыми массами или другими эксплуатационными перегрузками без излишней потери функциональной частоты вращения двигателя или сваливания скорости двигателя. Традиционные кривые крутящего момента двигателя для комбайнов были спроектированы для использования этого высокоуровневого выброса мощности выше паспортной номинальной мощности, для того чтобы усиливать способность системы в силовой передаче и позволять молотильной системе справляться с выволакиваемыми массами и кратковременными перегрузками во время уборочных операций. Такая перегрузка может происходить, когда скопления влажного материала резко поступают в молотильную систему, вызывая более высокие перегрузки короткой продолжительности.
На начальном уровне мощности рабочего спектра, комбайны также проводят значительное время на очень небольших нагрузках, таких как холостой ход или движение вниз по склону. В этих случаях, кривые высокопроизводительного крутящего момента, которые хорошо работают по эксплуатационным качествам, таким как прием выволакиваемой массы, высокие молотильные нагрузки, выгрузка зерна на ходу, и т.д., не дают в ответ настолько же хорошую экономию топлива, как кривая крутящего момента двигателя для эксплуатации на более низких уровнях мощности.
Современные регламенты EPA (40 CFR, часть 1039), озаглавленные «Control Of Emissions From New And In-Use Nonroad Compression-lgnition Engines» («Снижение токсичности выбросов из новых и находящихся в употреблении внедорожных двигателей с воспламенением от сжатия»), или указываемые ссылкой как «Final Tier 4» (FT4), предоставляют требование к дизельным двигателям более высокой мощности (>560 кВт) использовать только блоки избирательного каталитического восстановления (SCR). Ниже 560 кВт, специфичные выбросы из двигателя являются более важными и, во многих случаях, диктуют более интенсивное аппаратное решение.
Дизельные двигатели ниже 560 кВт могут требовать блоков рециркуляции отработавших газов (EGR), дизельного сажевого фильтра (DPF) и SCR для соблюдения регламентов FT4.
Изобретатели настоящего изобретения осознали необходимость в экономически эффективной силовой передаче с улучшенными характеристиками для комбайна, имеющей пиковую мощность сверх 560 кВт.
Изобретатели настоящего изобретения также осознали, что следует сохранять управляемость транспортного средства в комбайне, выброс мощности предусмотрен, поэтому, двигатель не останавливается, когда транспортное средство встречается с большой нагрузкой (выволакиваемыми массами урожая, движением вверх по склону, и т.д.). Требуется, чтобы выброс мощности около 12-14% сверх номинальной мощности сохранялся в резерве для поддержания управляемости для водителя. Если мощность двигателя, удерживаемая в резерве, может уменьшаться, производительность и экономия топлива транспортного средства могут повышаться.
Изобретатели настоящего изобретения осознали, что, даже если выброс мощности может быть уменьшен до некоторой степени с использованием аккумуляторной электрической гибридной системы, было был желательно понижать выброс мощности двигателя IC почти до нуля. Требуется улучшение зарядки аккумуляторной батареи, чтобы обеспечивать управляемость наряду с уменьшением выброса мощности двигателя IC почти до нуля. Без выброса мощности двигателя IC, и если блок аккумуляторных батарей заряжен не полностью, комбинированная кривая крутящий момент/частота вращения транспортного средства изменялась бы и давала бы в результате разные характеристики управляемости транспортного средства для водителя.
Изобретатели настоящего изобретения осознали, что требуется модифицировать систему, чтобы попытаться обнаружить все выбросы мощности двигателя, удерживаемые в резерве, так чтобы полная мощность двигателя могла использоваться почти постоянно.
Изобретатели настоящего изобретения также осознали, что одной из проблем при использовании литий-ионных аккумуляторных батарей является количество циклов заряда/разряда, которое может быть пройдено до того, как блок аккумуляторных батарей изнашивается. Изобретатели настоящего изобретения осознали, что способ, который уменьшает зарядку/разрядку блока аккумуляторных батарей, помог бы продлить срок службы аккумуляторной батареи.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Примерный вариант осуществления изобретения предусматривает комбайн, который соединяет относительно небольшой дизельный двигатель с аккумуляторным электрическим гибридным приводом, который требует только SCR для удовлетворения норм выбросов, но вырабатывает пиковую мощность сверх 600 кВт. Согласно варианту осуществления, используется 13,5-литровый дизельный двигатель, который вырабатывает пиковую мощность сверх 560 кВт. Типично, 19-20-литровые двигатели используются на этом уровне мощности. Несмотря на то, что кривая мощности двигателя IC достигает 560 кВт (или более), гибридный привод привносит электрический подъем мощности, чтобы содействовать двигателю IC и поддерживать его нормальный рабочий уровень мощности на более низких уровнях, чтобы улучшать долговечность.
Гибридный привод включает в себя блок аккумуляторных батарей и электродвигатель/генератор для обеспечения гибридной поддержки или подъема при действии в качестве электродвигателя и обеспечения зарядки блока аккумуляторных батарей при работе в качестве генератора.
Вариант осуществления использует 13,5-литровый двигатель вплоть до пиковой мощности сверх 560 кВт, чтобы давать возможность подхода только с SCR, и использует гибридную электрическую установку для выдачи дополнительного электрического подъема мощности, когда необходимо, чтобы, насколько это возможно, исключать нагрузки двигателя до таких высоких уровней.
Комбинация привода от двигателя IC и электродвигателя дает малошумную гибридную дизель-электрическую систему с блоком аккумуляторных батарей для накопления энергии. Уровень мощности двигателя на номинальной частоте вращения мог бы устанавливаться в 480 кВт. Изохронный регулятор-ограничитель может устанавливаться на предварительно выбранной частоте вращения (оборотах в минуту) с изломом кривой регулятора ограничителя по крутящему моменту на 480 кВт.
С повышением нагрузки на двигатель, частота вращения двигателя падает до первой пониженной частоты вращения, а мощность двигателя плавно переходит на приблизительно 500 кВт. В дополнение, электрический привод будет наращивать мощность линейно от 0 кВт на предварительно выбранной частоте вращения до 40 кВт на первой пониженной частоте вращения для комбинированной мощности (двигателя IC плюс электродвигателя) в 540 кВт на первой пониженной частоте вращения. Это дает подобные 'ощущения' и ездовые качества для водителя при нормальной работе, такой как работа при стабильных нагрузке-частоте вращения двигателя, при меняющейся переходной нагрузке. Если возникает перегрузка выше 540 кВт, двигатель будет наращивать пиковую мощность выше 560 кВт на второй пониженной частоте вращения, которая является меньшей, чем первая пониженная частота вращения, а электрический привод будет наращивать 50 кВт для комбинированной мощности сверх 610 кВт на второй пониженной частоте вращения. Быстрое повышение крутящего момента от первой пониженной частоты вращения до второй пониженной частоты вращения будет служить для обеспечения стабильной работы транспортного средства наряду с минимизацией подвергания двигателя высокой перегрузке.
Таким образом, вариант осуществления дает экономически эффективную силовую передачу с улучшенными характеристиками для комбайна, имеющую номинальную мощность 480 кВт и пиковую мощность более 560 кВт, использующую маломощный дизельный двигатель небольшого рабочего объема только с блоком SCR. Использование меньшего, более легкого двигателя вместе с компонентами гибридного привода улучшает экономию топлива и повышает производительность транспортного средства наряду с исключением более тяжеловесных двигателей промышленного назначения большего рабочего объема, в меньшей степени хорошо пригодных для тяжелых внедорожных комбайнов.
В качестве дополнительного аспекта вариантов осуществления изобретения, аккумуляторная электрическая гибридная система комбинируется с дизельным двигателем, при этом, дизельный двигатель изохронно ограничивается, и аккумуляторная электрическая система используется для обеспечения выброса мощности по мере того, как падает частота вращения двигателя IC. Кривая топливоснабжения двигателя управляется переменным образом, чтобы предоставлять возможность оптимальной зарядки блока аккумуляторных батарей по-прежнему наряду с сохранением идентичного ощущения кривой крутящий момент/частота вращения традиционного комбайна с негибридным приводом для водителя. Эта характеристика предоставляет возможность использования большей несущей способности двигателя, повышая производительность и экономию топлива.
Блок управления двигателем (ECU) принимает оценку состояния заряда (SOC) блока аккумуляторных батарей, напряжение блока аккумуляторных батарей, ток блока аккумуляторных батарей и предельные величины безопасного рабочего тока от блока управления аккумуляторными батареями. ECU также принимает или вычисляет текущую оценку нагрузки двигателя и частоту вращения двигателя. В зависимости от переменных, команда крутящего момента отправляется в блок управления электродвигателем/генератором, чтобы выдавать требуемую комбинированную кривую частота вращения/крутящий момент (электродвигателя/двигателя IC).
В случаях, где блок аккумуляторных батарей может заряжаться, кривая топливоснабжения двигателя устанавливается, чтобы обеспечивать максимальную мощность двигателя на изохронной частоте вращения.
После того, как блок аккумуляторных батарей заряжен, он выдает выброс мощности посредством комбинирования электрической поддержки и медленного высвобождения мощности зарядки аккумуляторных батарей по мере того, как падает частота вращения двигателя. С использованием полной мощности двигателя, экономия топлива должна улучшаться, а блок аккумуляторных батарей поддерживается в более высоком среднем SOC.
Когда блок аккумуляторных батарей полностью заряжен, кривая топливоснабжения двигателя понижается, чтобы сохранять эффективную комбинированную кривую крутящий момент/частота вращения и подходящую характеристику управляемости для водителя. Когда кривая топливоснабжения понижена, она формируется, так чтобы аккумуляторная электрическая поддержка не вовлекалась до тех пор, пока частота вращения двигателя не падает ниже предопределенной изохронной частоты вращения, установленной изохронным регулятором-ограничителем на предопределенную пониженную частоту вращения. Так как электрическая поддержка блока аккумуляторных батарей не используется до тех пор, пока не падает частота вращения двигателя, блок аккумуляторных батарей должен заряжаться/разряжаться реже, уменьшая количество циклов заряда/разряда, которые он проходит, и улучшая срок службы блока аккумуляторных батарей.
Конечным результатом этой системы должна быть гибридная система комбайна с большей производительностью и эффективностью использования топлива.
Конкретнее, блок управления блоком аккумуляторных батарей непрерывно контролирует ток аккумуляторных батарей, напряжение отдельных элементов батареи и температуру отдельных элементов батареи. По этим измерениям, блок управления блоком аккумуляторных батарей рассчитывает состояние заряда (SOC) блока аккумуляторных батарей с использованием способов, типичных в данной отрасли промышленности (то есть, «подсчет кулонов»). Блок управления блоком аккумуляторных батарей также измеряет выходное напряжение постоянного тока с использованием стандартных датчиков. Блок управления блоком аккумуляторных батарей сообщает значение своего SOC, средней температуры элементов батареи (сумму температур всех элементов батареи, деленную на количество элементов батареи) и выходное напряжение в ECU каждые 10 мс по шине CAN.
Блок управления электродвигателем/генератором включает в себя стандартный инвертор источника напряжения, который преобразует напряжение/ток постоянного тока в напряжение/ток переменного тока, и наоборот. Блок управления электродвигателем/генератором принимает команду крутящего момента по шине CAN из ECU каждые 10 мс. Блок управления электродвигателем/генератором принимает эту команду крутящего момента и применяет значение к справочной таблице (предварительно определенной посредством испытаний), которая задает величину и фазовый угол тока, необходимые, чтобы заставить электродвигатель/генератор вырабатывать такой крутящий момент. Инвертор затем использует регулирование тока, как типично в данной отрасли промышленности, чтобы формировать токи в электродвигателе/генераторе, которые, в таком случае, вырабатывают требуемый крутящий момент на валу. В зависимости от команды крутящего момента, поток энергии может быть из блока аккумуляторных батарей, преобразуемым в механическую энергию для содействия двигателю, или поток может преобразовывать механическую энергию в электрическую энергию, которая затем накапливается в блоке аккумуляторных батарей. Блок управления электродвигателем/генератором также сопрягается с датчиком положения на электродвигателе/генераторе. Частота вращения электродвигателя/генератора рассчитывается по данным положения посредством взятия производной за дискретное время.
Электродвигатель/генератор присоединен к двигателю, например, посредством использования встроенной коробки передач, крутящий момент которой, вырабатываемый электродвигателем/генератором прибавляется/вычитается из крутящего момента двигателя. Частота вращения электродвигателя/генератора может иметь постоянное отношение к частоте вращения двигателя.
ECU управляет топливоснабжением двигателя. ECU знает количество топлива, которое он применяет, и, к тому же, измеряет частоту вращения двигателя, что является типичным в данной отрасли промышленности. Топливоснабжение управляется, так чтобы частота вращения изохронно ограничивалась посредством ECU на предопределенной изохронной частоте вращения с выбросом мощности для понижения частоты вращения. ECU поддерживает предопределенную изохронную частоту вращения двигателя до тех пор, пока крутящий момент двигателя не достигает того, что известно в качестве «номинального состояния», которое может меняться. После того, как крутящий момент достигает этой точки, ECU больше не ограничивает частоту вращения предопределенной изохронной частотой вращения. ECU дает команду дополнительного крутящего момента пропорционально разности между текущей частотой вращения и изохронной частотой вращения.
Легче всего посмотреть, каким образом ECU регулирует частоту вращения двигателя в ответ на повышение нагрузки посредством оценки кривых мощность/частота вращения вместо кривых крутящий момент/частота вращения. Мощность двигателя имеет значение крутящего момента двигателя, умноженное на частоту вращения двигателя с надлежащими коэффициентами преобразования для единиц измерения. ECU использует первую кривую, где нет выброса мощности, и полная мощность двигателя является доступной на изохронно регулируемой частоте вращения. ECU также использует вторую кривую, которая изохронно регулирует частоту вращения двигателя до тех пор, пока крутящий момент/мощность на выходном валу двигателя не достигает определенного уровня крутящего момента/мощности. Для нагрузок двигателя выше такого уровня крутящего момента/мощности, ECU повышает крутящий момент двигателя на величину пропорционально разности между текущей частотой вращения и изохронной частотой вращения, где частота вращения двигателя определяется механической системой. ECU рассчитывает крутящий момент, вырабатываемый двигателем, применяя известный командный уровень топливоснабжения к справочной таблице (предварительно определенной посредством испытаний), которая учитывает потери, так что сообщенный крутящий момент двигателя является тем, что имеется в распоряжении на коленчатом валу.
ECU определяет, какую кривую мощность/частота вращения следует использовать для регулирования частоты вращения двигателя. Если SOC блока аккумуляторных батарей является меньшим, чем предварительно выбранный верхний предел (например, 60% максимального SOC), ECU использует первую кривую мощность/частота вращения («быстрая подзарядка»).
Если SOC блока аккумуляторных батарей является большим, чем предварительно выбранный верхний предел, ECU использует вторую кривую мощность/частота вращения («полностью заряженный»).
ECU рассчитывает текущую мощность (кВт) двигателя посредством умножения крутящего момента на выходном валу двигателя (Н⋅м) и частоты вращения двигателя (оборотов в минуту), на коэффициент преобразования.
ECU рассчитывает «Hybrid_Shaping_Power», необходимую из гибридной системы, чтобы формировать общий крутящий момент транспортного средства как требуется, беря частоту вращения двигателя и применяя такой сигнал к справочной таблице (предварительно рассчитанным значениям). Справочная таблица для каждого рабочего случая принимает частоту вращения двигателя и выводит мощность.
ECU рассчитывает величину мощности, которую он имеет в распоряжении для зарядки блока аккумуляторных батарей, вычитая текущую мощность двигателя и текущую гибридную поддержку из «номинальной мощности» в зависимости от первой или второй выбранной кривой.
ECU рассчитывает максимальную мощность, которая может использоваться для разрядки и зарядки блока аккумуляторных батарей, применяя сигналы SOC блока аккумуляторных батарей и средней температуры элементов батареи к справочной таблице, которая выводит максимально допустимый ток разрядки и зарядки в этот момент времени (справочная таблица предварительно определена посредством испытаний). Эти токи затем умножаются на выходное напряжение блока аккумуляторных батарей, чтобы определить максимально допустимую мощность, которая должна использоваться для разрядки и зарядки. Мощность разрядки положительна, а мощность зарядки отрицательна.
Справочные таблицы определяются с учетом максимально допустимого тока заряда/разряда, который может термически выдерживать аккумуляторная батарея, или другого предельного значения, когда SOC находится между первым нижним пределом (например, 40% максимального SOC) и первым верхним пределом (например, 60% максимального SOC). Когда SOC находится ниже первого нижнего предела, величина допустимого тока разряда линейно снижается от первого нижнего предела до 0 ампер на втором, меньшем нижнем пределе (например, 30% максимального SOC). Когда SOC находится выше первого верхнего предела, величина допустимого тока заряда линейно снижается от значения на первом верхнем пределе до 0 ампер на втором более высоком верхнем пределе (например, 70% максимального SOC). Это делается, чтобы максимизировать срок службы блока аккумуляторных батарей.
ECU рассчитывает требуемую мощность гибридной системы посредством вычитания имеющейся в распоряжении мощности двигателя из «Hybrid_Shaping_Power». Если результат превышает значение максимально допустимой мощности разряда или является меньшим, чем значение максимально допустимой мощности разряда (мощность разрядки является отрицательной), мощность гибридной системы ограничивается значением максимально допустимой мощности разряда для разрядки блока аккумуляторных батарей во время гибридной поддержки или значением максимально допустимой мощности заряда во время зарядки блока аккумуляторных батарей.
Команда крутящего момента инвертора вырабатывается посредством деления команды гибридной мощности на частоту вращения электродвигателя/генератора в качестве сообщенной инвертором (в рад/с) для расчета команды крутящего момента в единицах Н⋅м. ECU затем передает эту команду крутящего момента в инвертор по шине CAN.
В гибридной системе, энергия накапливается в блоке аккумуляторных батарей и используется для обеспечения выброса мощности. В течение времени меньшего, чем время номинальной нагрузки, блок аккумуляторных батарей заряжается с восстановлением предшествующего состояния. Это предоставляет возможность устанавливать «номинальную мощность» выше, ближе к или равной пиковой мощности, для одного и того же двигателя IC, не принося в жертву выброс мощности.
Когда SOC находится между первым нижним пределом и первым верхним пределом SOC (например, 30% и 60% максимального SOC), ECU подает команду кривой мощности двигателя и гибридной мощности электродвигателя/генератора на меньший, чем полностью заряженный режим. Двигатель выдает максимальную мощность на изохронной частоте вращения, а блок аккумуляторных батарей обеспечивает выброс мощности. Гибридная система осуществляет заряд на уровне мощности требуемого выброса мощности минус имеющаяся в распоряжении мощность разряда (функция SOC блока аккумуляторных батарей и температуры элемента аккумуляторной батареи) на изохронной частоте вращения, линейно уменьшая зарядку по мере того, как частота вращения двигателя падает (давая в результате большую мнимую мощность у транспортного средства). Это устанавливает мнимую «номинальную мощность» у транспортного средства. Таким образом, обеспечивается требуемый выброс мощности. Если частота вращения двигателя находится на изохронной частоте вращения, а нагрузка двигателя является меньшей, чем «номинальная мощность», гибридная система может заряжаться на уровне мощности, по существу, равной разности между «номинальной мощностью» и текущей мощностью двигателя, поддерживая двигатель полностью нагруженным.
Когда SOC находится выше первого верхнего предела SOC, ECU дает команду мощности кривой двигателя находиться на уровне ниже максимальной мощности в полностью заряженном режиме. Гибридная система предусматривает нулевую поддержку до тех пор, пока двигатель не достигает максимальной мощности. Частота вращения двигателя, при которой начинается гибридная поддержка, выбирается, чтобы быть ниже частоты вращения, на которой типично работают водители (2150 оборотов в минуту или выше - частота вращения, на которую обычно нацелены водители). Это делается, чтобы ограничивать величину зарядки/разрядки блока аккумуляторных батарей, и продлевает срок службы блока аккумуляторных батарей.
Многочисленные другие преимущества и признаки настоящего изобретения станут без труда очевидны из последующего подробного описания изобретения и его вариантов осуществления, из формулы изобретения и из прилагаемых чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
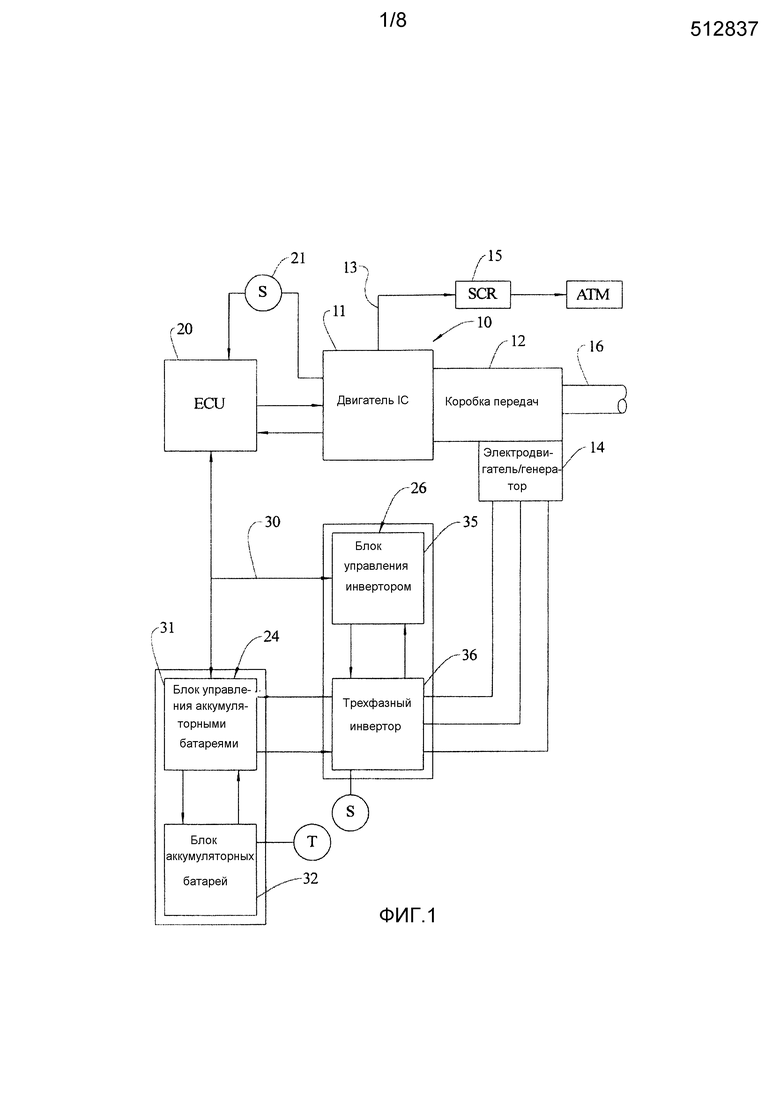
Фиг. 1 - структурная схема одного из вариантов осуществления системы для аккумуляторного электрического гибридного привода для уборочного комбайна.
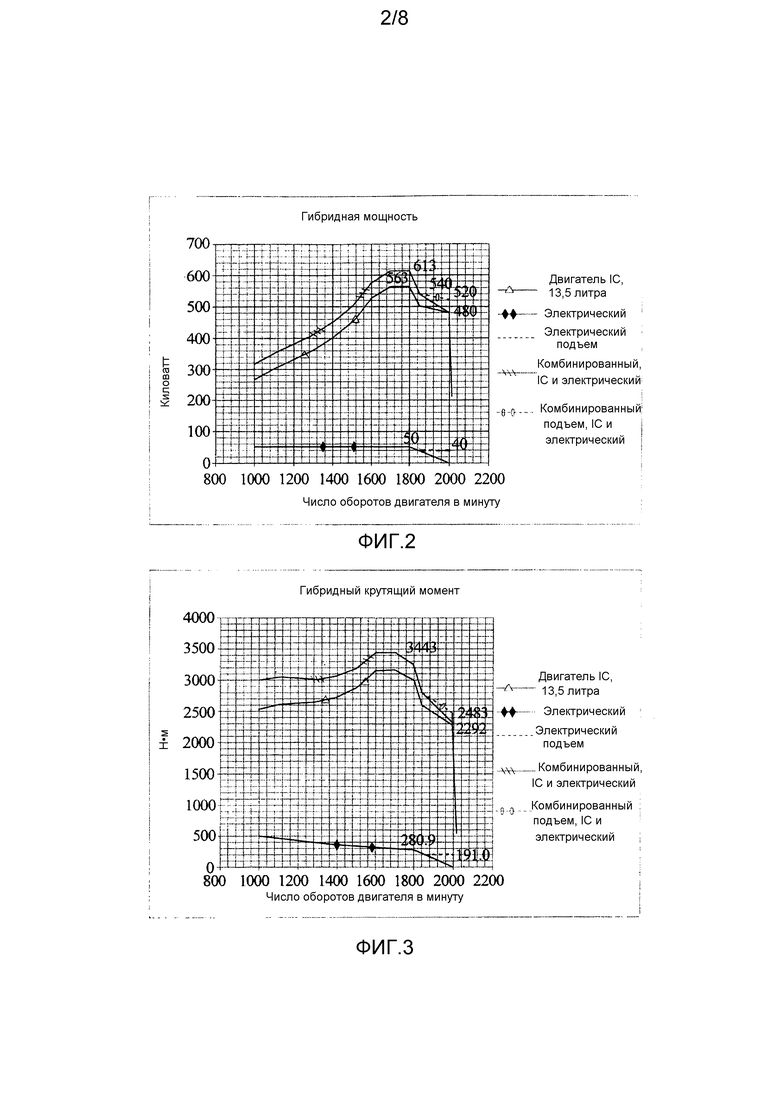
Фиг. 2 - графическая диаграмма мощности в зависимости от частоты вращения двигателя для двигателя IC с аккумуляторным электрическим гибридным приводом.
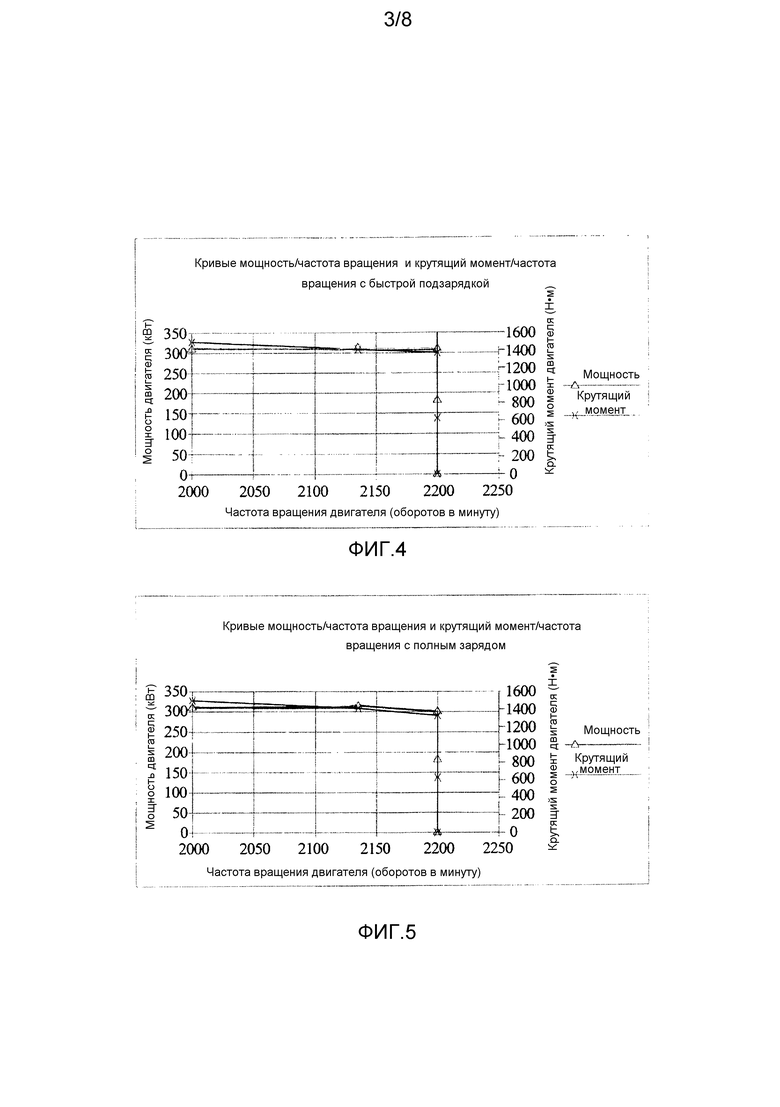
Фиг. 3 - графическая диаграмма крутящего момента в зависимости от частоты вращения двигателя для двигателя IC с аккумуляторным электрическим гибридным приводом.
Фиг. 4 - графическая диаграмма мощности и крутящего момента в зависимости от частоты вращения двигателя для двигателя IC, который должен использоваться с аккумуляторным электрическим гибридным приводом в режиме работы быстрой подзарядки.
Фиг. 5 - графическая диаграмма мощности и крутящего момента в зависимости от частоты вращения двигателя для двигателя IC, который должен использоваться с аккумуляторным электрическим гибридным приводом в полностью заряженном режиме работы.
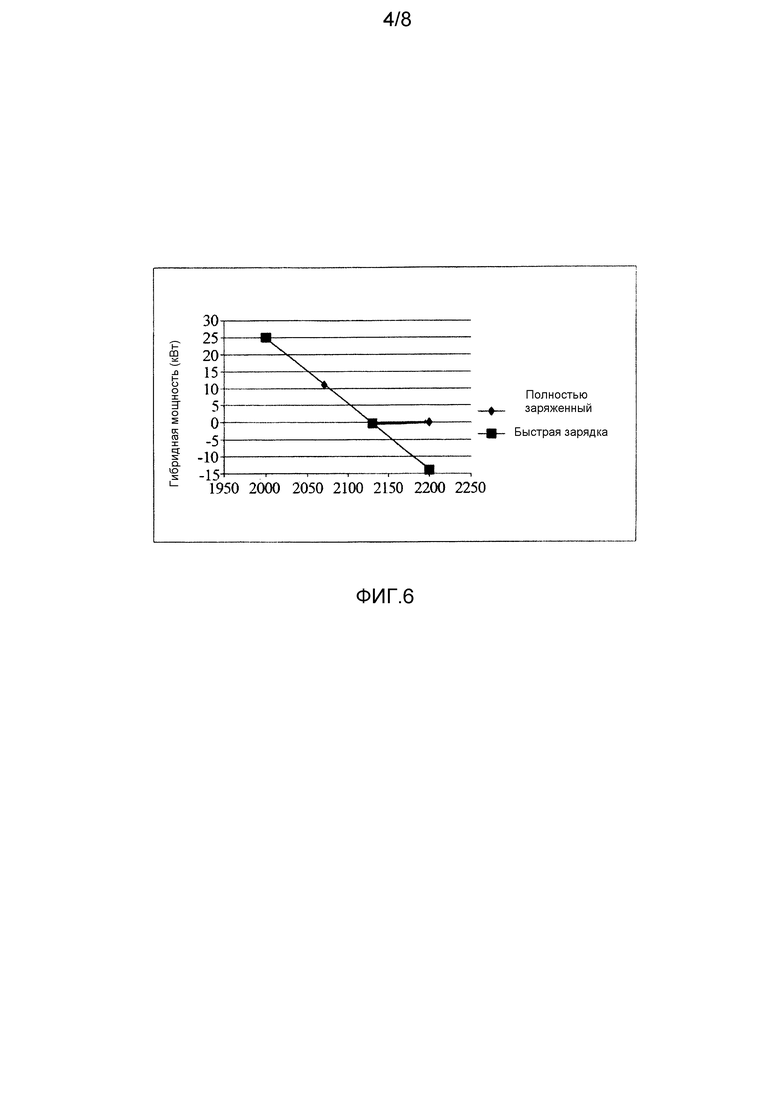
Фиг. 6 - графическая диаграмма команды мощности гибридного источника энергии в зависимости от частоты вращения двигателя для двигателя IC по фиг. 4 и 5, показывающая как режим работы быстрой подзарядки, так и полностью заряженный режим работы.
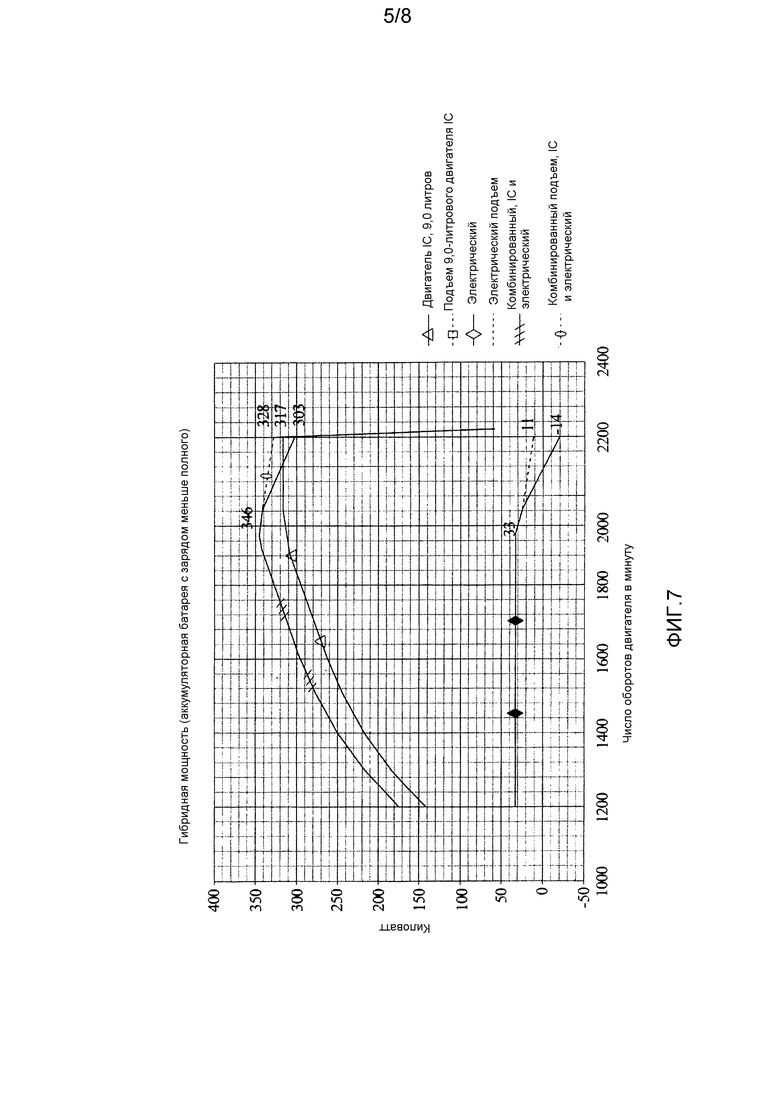
Фиг. 7 - графическая диаграмма мощности в зависимости от частоты вращения двигателя для двигателя IC по фиг. 4 и аккумуляторного электрического гибридного привода в режиме работы быстрой подзарядки, показывающая мощность двигателя и мощность электродвигателя/генератора и их комбинацию.
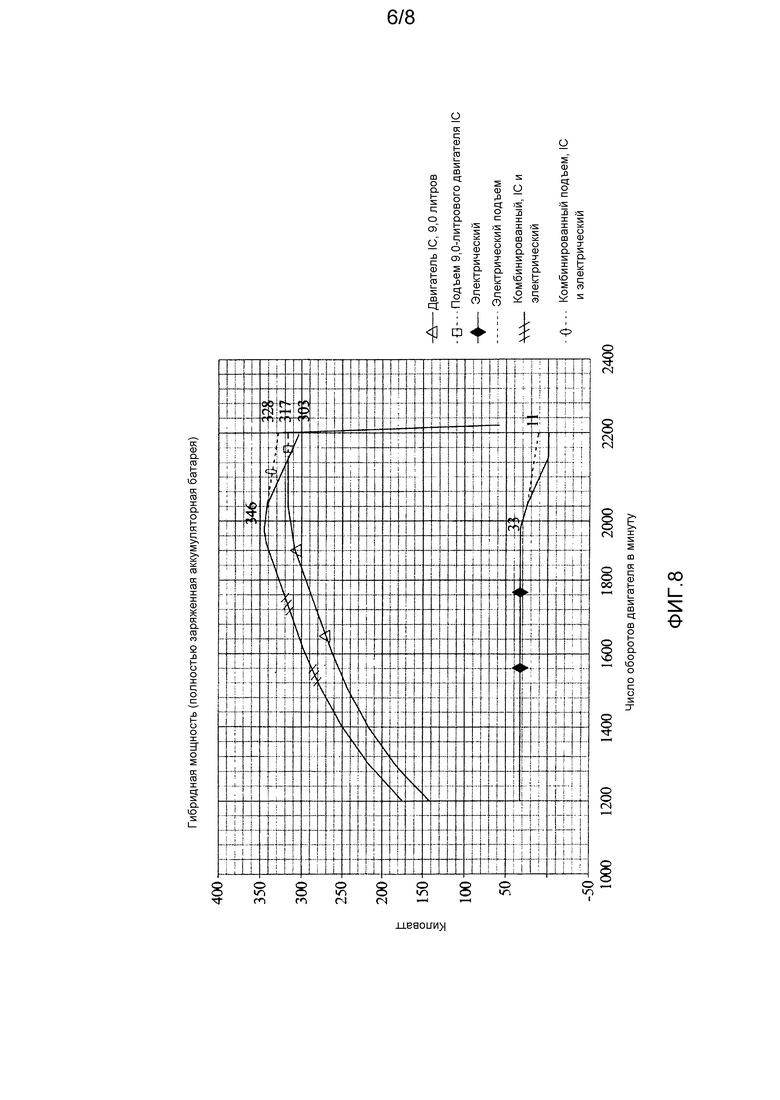
Фиг. 8 - графическая диаграмма мощности в зависимости от частоты вращения двигателя для двигателя IC по фиг. 5 и аккумуляторного электрического гибридного привода в полностью заряженном режиме работы, показывающая мощность двигателя и мощность электродвигателя/генератора и их комбинацию.
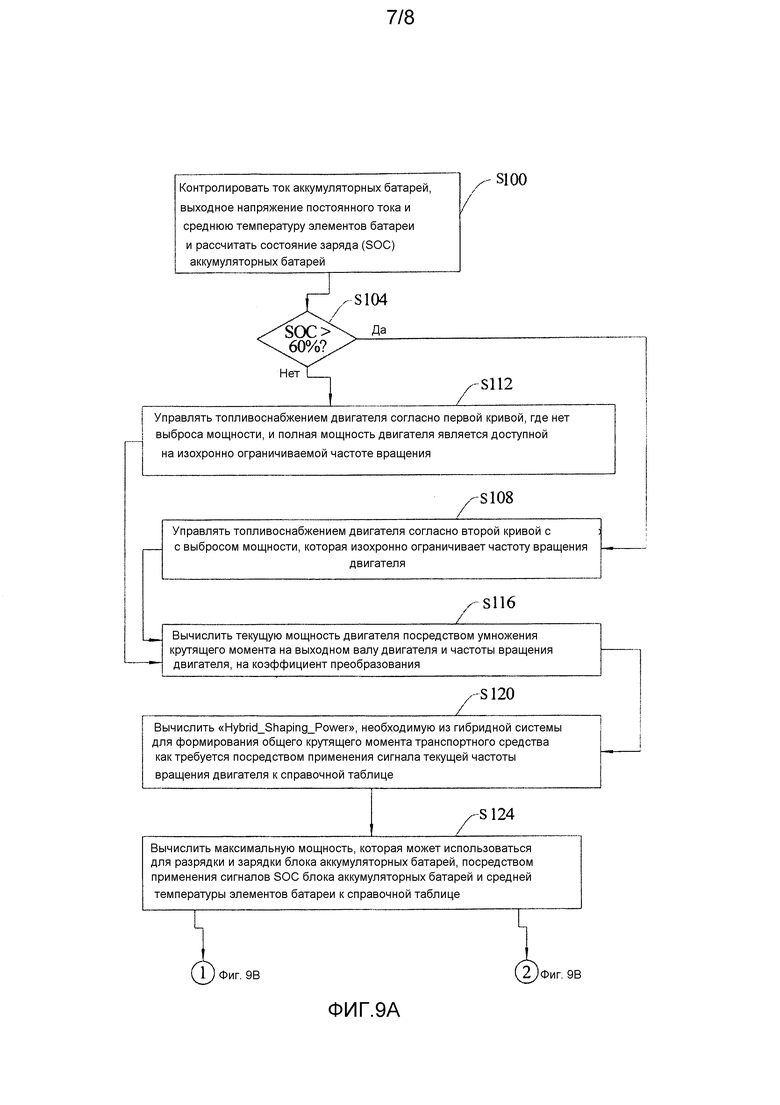
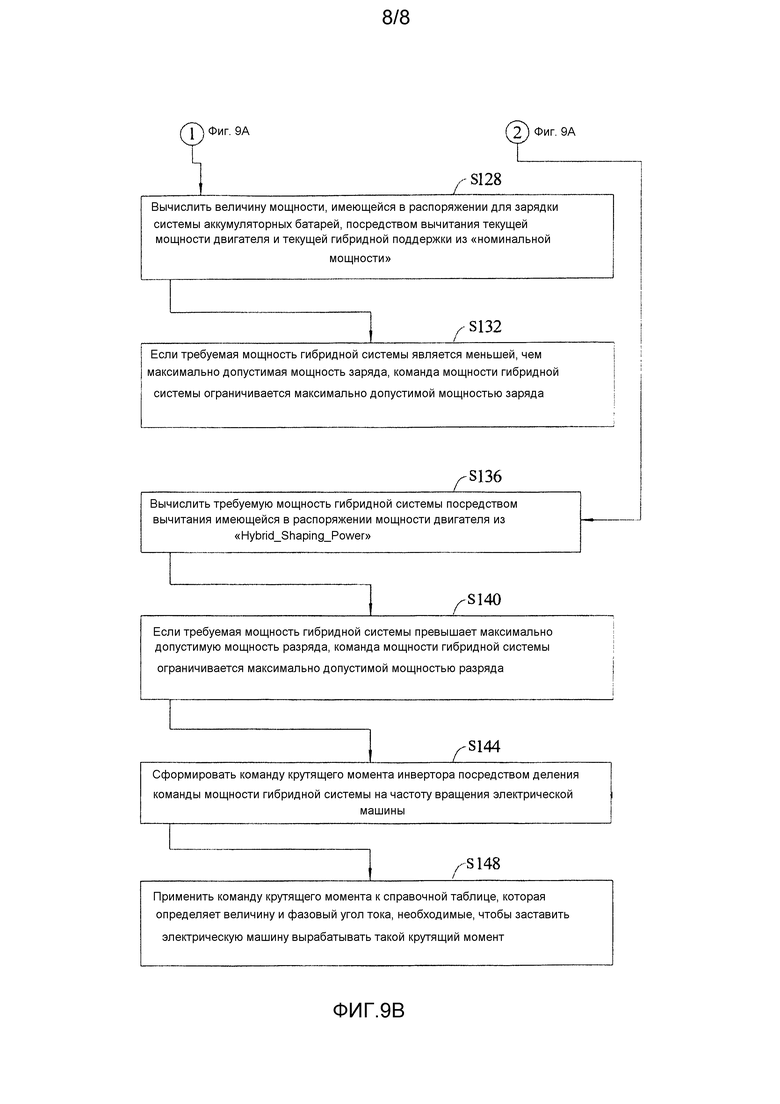
Фиг. 9A и 9B вместе - блок-схема последовательности этапов выполнения способа, согласно одному из способов изобретения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
Несмотря на то, что это изобретение является допускающим варианты осуществления в многих разных формах, на чертежах показаны и будут подробно описаны в материалах настоящей заявки его специфичные варианты осуществления с пониманием, что настоящее раскрытие должно рассматриваться в качестве пояснения примером принципов изобретения и не подразумевается ограничивающим изобретение проиллюстрированными специфичными вариантами осуществления.
В соответствии с одним из вариантов осуществления, фиг. 1 иллюстрирует систему 10 для аккумуляторного электрического гибридного привода для уборочного комбайна. Система 10 содержит двигатель 11 внутреннего сгорания, механически присоединенный к коробке передач. Электродвигатель/генератор 14 также присоединен к коробке 12 передач. Двигатель 11 включает в себя выпускной тракт 13 через блок 15 SCR и в атмосферу.
В свою очередь, выход 16 (например, выходной вал) коробки 12 передач выдает энергию вращения для приведения в движение транспортного средства, приведения в действие принадлежностей, или того и другого.
Электронный блок 20 управления (ECU) сигнально соединен с элементами управления и датчиками двигателя.
Датчик 21 частоты вращения двигателя (например, датчик частоты вращения (RPM)) ассоциативно связан с двигателем 11 внутреннего сгорания. Выходной сигнал датчика частоты вращения двигателя выдается непосредственно или опосредованно в ECU 20. Если датчик частоты вращения двигателя выдает аналоговый выходной сигнал, аналого-цифровой (A/D) преобразователь может быть вставлен между датчиком частоты вращения двигателя и процессором данных.
ECU 20 поддерживает связь с одним или более из следующих устройств: двигателем 11 IC, электрическим устройством 24 накопления энергии и электродвигателем/генератором 26.
Линии, соединяющие вышеизложенные устройства 11, 24, 26 с ECU 20 могут представлять один или более логических трактов данных, физических трактов данных или то и другое. Например, соединения могут быть реализованы в качестве шин данных или шины 30 CAN.
Устройство 24 накопления энергии может содержать блок 31 управления аккумуляторными батареями и блок 32 аккумуляторных батарей. Шина 30 данных сигнально соединена с блоком 31 управления аккумуляторными батареями.
Блок 26 управления электродвигателем/генератором может содержать блок 35 управления инвертором, который сигнально соединен с трехфазным инвертором 36. Шина 30 данных сигнально соединена с блоком 35 управления инвертором.
Электрический электродвигатель/генератор 14 может работать в по меньшей мере двух режимах: режиме электрического приведения в движение и в режиме выработки электроэнергии. В режиме электрического приведения в движение, электродвигатель/генератор 14 действует в качестве электродвигателя, где электродвигатель 14 и двигатель 11 являются действующими и приводят в движение транспортное средство.
В режиме выработки электроэнергии, электродвигатель/генератор 14 действует в качестве генератора. Например, в режиме выработки электроэнергии, двигатель 11 может приводить в действие электродвигатель/генератор 14.
В одной из конфигураций, электродвигатель/генератор 14 может содержать электродвигатель постоянного тока (DC) и генератор постоянного тока (DC).
В альтернативном варианте осуществления, электродвигатель/генератор 14 может содержать электродвигатель/генератор переменного тока (AC), который потребляет и вырабатывает переменный ток. Если электродвигатель/генератор 14 или генератор вырабатывает переменный ток, выпрямитель (например, двухполупериодный мостовой выпрямитель или диодная схема) может быть расположен между электродвигателем/генератором 14 и устройством 24 накопления энергии.
Блок 26 управления электродвигателем/генератором (например, инвертор или источник переменного напряжения) способен обеспечивать сигнал управления электродвигателем/генератором на электродвигатель/генератор 14. Сигнал управления электродвигателем/генератором может использоваться для управления любым из следующего: частоты вращения электродвигателя, крутящего момента электродвигателя, направления вращения электродвигателя, действующим или недействующим состоянием электродвигателя и рабочим циклом электродвигателя.
Описанный электродвигатель/генератор 14 имеет конфигурацию переменного тока, а блок 26 управления электродвигателем/генератором содержит блок 35 управления инвертором и трехфазный инвертор 36, который преобразует электроэнергию постоянного тока из устройства 24 накопления энергии в переменный ток. Инвертор может содержать схему модулятора, схему переключения или генератор плавного диапазона частот для управления частотой фазой или длительностью импульса для сигнала управления электродвигателем/генератором, чтобы регулировать или настраивать частоту вращения электродвигателя у электродвигателя/генератора 14.
В качестве альтернативы, если электродвигатель/генератор 14 является конфигурацией постоянного тока, блок 26 управления электродвигателем/генератором может содержать источник регулируемого напряжения. Источник регулируемого напряжения управляет уровнем напряжения или уровнем тока сигнала управления для регулятора или настраивает частоту вращения электродвигателя у электродвигателя/генератора 14.
Устройство 24 накопления энергии содержит блок 32 аккумуляторных батарей. В качестве альтернативы, он мог бы содержать суперконденсатор, схему конденсаторов, комбинацию вышеизложенных устройств или другое устройство накопления.
Устройство 24 накопления энергии принимает и накапливает электрическую энергию, вырабатываемую электродвигателем/генератором 14 в режиме выработки электроэнергии. Устройство 24 накопления энергии подает накопленную электрическую энергию в блок 26 управления электродвигателем/генератором в режиме электрического приведения в движение.
ECU 20 может содержать микроконтроллер, микропроцессор, цифровой сигнальный процессор, программируемую логическую матрицу, логическое устройство или другое устройство для обработки данных (например, данных датчиков, выдаваемых датчиком частоты вращения двигателя, блоком 31 управления аккумуляторными батареями, блоком 26 управления инвертором или датчиком крутящего момента). ECU 20 может включать в себя устройство хранения данных и программное обеспечение или команды хранения и извлечения данных для извлечения или осуществления доступа к справочным данным, хранимым в устройстве хранения данных. ECU 20 содержит блок оценки для оценки или сравнения данных частоты вращения двигателя, данных крутящего момента двигателя, данных состояния накопления энергии (например, данных состояния заряда) или других данных датчиков со справочными данными, хранимыми в устройстве накопления энергии. Справочные данные, например, могут содержать данные базовой кривой крутящего момента, данные дополнительной кривой крутящего момента и данные частоты вращения двигателя.
Блок 31 управления аккумуляторными батареями содержит систему для контроля состояния накопления энергии или состояния заряда (SOC) устройства 24 накопления энергии (например, блока аккумуляторных батарей).
Блок 31 управления аккумуляторными батареями может содержать один или более из следующих компонентов: устройства обработки данных (например, микроконтроллера) или логического устройства, амперметра или измерителя тока, вольтметра, термометра и тактового генератора. SOC представляет собой оставшуюся емкость аккумуляторной батареи или электрического устройства накопления в цикле заряда/разряда. SOC может быть выражено в качестве процентного отношения оставшейся емкости к емкости полного заряда или максимальному SOC состаренной по количеству циклов аккумуляторной батареи. В одном из вариантов осуществления, SOC электрического устройства накопления может оцениваться посредством измерения потребления тока и уровне напряжения с равными временными интервалами. В еще одном варианте осуществления, SOC может быть основан на модели аккумуляторной батареи, которая учитывает одно или более из следующего: напряжения зарядки, времени зарядки, температуры зарядки, скорости разряда, температуры разряда, восстановления заряда, циклического старения, электромеханических композиционных факторов и электрической эквивалентной схемы.
Данные состояния заряда могут снабжаться меткой времени или ассоциативно связываться с указателем времени.
Примерный вариант осуществления изобретения предусматривает уборочный комбайн с силовой передачей, который соединяет относительно небольшое дизельный двигатель 11 с аккумуляторным электрическим гибридным приводом, который требует только блока 15 SCR для удовлетворения норм выбросов, но вырабатывает пиковую мощность сверх 600 кВт. Согласно варианту осуществления, используется 13,5-литровый дизельный двигатель 11, который вырабатывает пиковую мощность 560kW. Типично, 19-20-литровые двигатели используются на этом уровне мощности. Несмотря на то, что кривая крутящего момента двигателя IC достигает 563 кВт (или более), электрический привод привносит электрический подъем мощности, чтобы содействовать двигателю IC и поддерживать его нормальный рабочий уровень мощности на гораздо более низких уровнях, чтобы улучшать долговечность.
Вариант осуществления использует 13,5-литровый двигатель вплоть до пиковой мощности 563 кВт, чтобы давать возможность подхода только с SCR и использовать гибридный электродвигатель для выдачи дополнительного электрического подъема мощности, когда необходимо, чтобы, насколько только возможно, избегать нагрузки двигателя до таких высоких уровней.
Комбинация дает нешумную гибридную дизель-электрическую систему с блоком 32 аккумуляторных батарей для накопления энергии, как продемонстрировано на фиг. 2 и 3. Условные обозначения для этих фигур являются следующими:
«Двигатель IC, 13,5 литров» указывает ссылкой на кривую для 13,5-литрового дизельного двигателя.
«Электрический» указывает ссылкой на гибридную поддержку, то есть, мощность, выдаваемую блоком аккумуляторных батарей и электродвигателем/генератором, положительную или отрицательную.
«Электрический подъем» указывает ссылкой на специальные условия эксплуатации, где дополнительная мощность отбирается из гибридной поддержки, то есть, мощность, выдаваемую блоком аккумуляторных батарей и электродвигателем/генератором.
«Комбинированный IC и электрический» указывает ссылкой на комбинированную кривую, показывающую сумму мощности или крутящего момента из двигателя IC и гибридной поддержки, то есть, мощность, выдаваемую блоком аккумуляторных батарей и электродвигателем/генератором, положительную или отрицательную.
«Комбинированный подъем IC и электрический» указывает ссылкой на комбинированную кривую, показывающую сумму мощности или крутящего момента из двигателя IC и гибридной поддержки во время специальных условий эксплуатации.
Уровень мощности двигателя на номинальной частоте вращения (~2000 оборотов в минуту) в идеале устанавливался бы в 480 кВт. Изохронный регулятор-ограничитель внутри ECU может устанавливаться на 2000 оборотах в минуту с изломом кривой регулятора ограничителя по крутящему моменту на 480 кВт. С вытеснением кривой крутящего момента до 1850 оборотов в минуту, мощность двигателя плавно переходила бы на 500 кВт. В дополнение, электрический привод 14 будет наращивать модность линейно от 0 до 2000 оборотов в минуту до 40 кВт на 1850 оборотах в минуту для комбинированной мощности в 540 кВт на 1850 оборотов в минуту. Это давало бы подобные 'ощущения' и управляемость для водителя при нормальной работе, такой как работа при стабильных нагрузке/частоте вращения двигателя, при меняющейся переходной нагрузке. Если перегрузка происходит выше 540 кВт, двигатель будет нарастать до пиковой мощности 563 кВт на 1800 оборотах в минуту, а электрический привод будет нарастать до 50 кВт для комбинированной мощности 613 кВт на 1800 оборотах в минуту. Быстрое повышение крутящего момента от 1850 до 1800 оборотов в минуту будет служить для обеспечения стабильной работы транспортного средства наряду с минимизацией подвергания двигателя высокой перегрузке.
Таким образом, вариант осуществления дает экономически эффективную силовую передачу с улучшенными характеристиками для комбайна, имеющую номинальную мощность 480 кВт и пиковую мощность сверх 560 кВт, использующую маломощный дизельный двигатель небольшого рабочего объема только с блоком SCR без необходимости в блоках EGR и DPF.
Обе фиг. 2 и 3 иллюстрируют мощность или крутящий момент «подъема». Мощность подъема обеспечивается двигателем IC и гибридной поддержкой для определенных условий эксплуатации.
Например, когда комбайн разгружается во время работы, зерно перемещается из бункера для зерна комбайна в грузовик наряду с тем, что оба, комбайн и грузовик, движутся во время работы комбайна. Выгрузка зерна требует мощности для приведения в действие шнеков. С тем чтобы не требовать, чтобы комбайн замедлялся, функция подъема показана пунктирными линиями на фиг. 2 и 3. На фиг. 2, мощность подъема обеспечивается на 40 кВт из гибридной поддержки, то есть, блока аккумуляторных батарей и электродвигателя 14. На фиг. 3, крутящий момент подъема обеспечивается на 191 Н⋅м из гибридной поддержки, то есть, блока аккумуляторных батарей и электродвигателя 14.
В качестве дополнительного варианта осуществления, предусмотрена аккумуляторная электрическая гибридная система, где дизельный двигатель изохронно ограничивается, и аккумуляторная электрическая система используется для обеспечения выброса мощности по мере того, как падает частота вращения. Кривая топливоснабжения двигателя управляется переменным образом, чтобы предоставлять возможность для оптимальной зарядки блока аккумуляторных батарей по-прежнему наряду с сохранением идентичного ощущения кривой крутящий момент/частота вращения для водителя. Эта характеристика будет обеспечивать возможность использования большей несущей способности двигателя, повышая производительность и экономию топлива.
Фиг. 4-8 описывают результаты, продемонстрированные с использованием 9,0-литрового двигателя IC. Этот вариант осуществления также охватывает другие размеры двигателей IC, в том числе, 13,5-литровый двигатель по фиг. 2-3.
ECU 20 принимает оценку SOC, напряжение блока аккумуляторных батарей, ток блока аккумуляторных батарей и предельные величины безопасного рабочего тока из блока 31 управления аккумуляторными батареями. ECU 20 также принимает или рассчитывает текущую оценку нагрузки двигателя и частоту вращения двигателя. В зависимости от переменных, команда крутящего момента отправляется в блок 35 управления инвертором, чтобы выдавать требуемую комбинированную кривую частота вращения/крутящий момент (электродвигателя/двигателя IC).
В случаях, где блок аккумуляторных батарей может заряжаться, кривая топливоснабжения двигателя устанавливается, чтобы обеспечивать максимальную мощность двигателя на изохронной частоте вращения, показанной на фиг. 4. Как только заряжен, блок аккумуляторных батарей может обеспечивать выброс мощности посредством комбинирования электрической поддержки и медленного высвобождения мощности зарядки аккумуляторных батарей по мере того, как падает частота вращения двигателя (фиг. 5). С использованием полной мощности двигателя, экономия топлива должна улучшаться, а блок аккумуляторных батарей поддерживаться в более высоком среднем SOC.
Когда блок аккумуляторных батарей полностью заряжен, кривая топливоснабжения двигателя понижается, чтобы сохранять прежнюю комбинированную кривую крутящий момент/частота вращения и подходящую характеристику управляемости для водителя, как показано на фиг. 5. Когда кривая топливоснабжения понижена, она формируется, так чтобы аккумуляторная электрическая поддержка не вовлекалась до тех пор, пока частота вращения двигателя не падает ниже 2130 оборотов в минуту (изохронный регулятор-ограничитель устанавливается на 2200 оборотов в минуту). Когда это делается, блок аккумуляторных батарей должен заряжаться/разряжаться реже, уменьшая количество циклов заряда/разряда, которые он проходит, с улучшением срока службы блока аккумуляторных батарей.
Конечным результатом этой системы должна быть гибридная система комбайна с большей производительностью и эффективностью использования топлива.
Конкретнее, блок 31 управления блоком аккумуляторных батарей непрерывно контролирует ток аккумуляторных батарей, напряжение отдельных элементов батареи и температуру отдельных элементов батареи. По этим измерениям, блок аккумуляторных батарей рассчитывает состояние заряда (SOC) блока аккумуляторных батарей с использованием способов, типичных в данной отрасли промышленности (то есть, «подсчет кулонов»). Блок 31 управления блоком аккумуляторных батарей также измеряет выходное напряжение постоянного тока с использованием стандартных датчиков. Блок 31 управления аккумуляторными батареями сообщает значение своего SOC блока аккумуляторных батарей, средней температуры элементов батареи (сумму температур всех элементов батареи, деленную на количество элементов батареи) и выходное напряжение в ECU каждые 10 мс по шине CAN.
Блок 26 управления электродвигателем/генератором является стандартным инвертором источника напряжения, который преобразует напряжение/ток постоянного тока в напряжение/ток переменного тока, и наоборот. Блок 35 управления инвертором принимает команду крутящего момента по шине 30 CAN из ECU 20 каждые 10 мс.
Блок 35 управления инвертором принимает эту команду крутящего момента и применяет значение к справочной таблице (предварительно определенной посредством испытаний), которая задает величину и фазовый угол тока, необходимые, чтобы заставить электродвигатель/генератор вырабатывать такой крутящий момент. Инвертор 36 затем использует регулирование тока, как типично в данной отрасли техники, чтобы формировать токи в электродвигателе/генераторе, которые, в таком случае, вырабатывают требуемый крутящий момент в коробку передач. В зависимости от команды крутящего момента, поток энергии может быть из блока аккумуляторных батарей, преобразуемым в механическую энергию для содействия двигателю, или поток может преобразовывать механическую энергию в электрическую, которая затем накапливается в блоке 32 аккумуляторных батарей, с помощью блока 31 управления аккумуляторными батареями. Блок 35 управления инвертором также сопрягается с датчиком положения на электродвигателе/генераторе. Частота вращения электродвигателя/генератора рассчитывается по данным положения посредством взятия дискретной производной по времени.
ECU 20 управляет топливоснабжением двигателя 11. ECU управляет количеством топлива, которое он применяет, и, к тому же, измеряет частоту вращения двигателя, что является типичным в данной области техники. Топливоснабжение управляется, так чтобы частота вращения изохронно ограничивалась на 2200 оборотах в минуту при выбросе мощности. ECU регулирует частоту вращения двигателя до тех пор, пока крутящий момент двигателя не достигает того, что известно в качестве «номинального состояния», которое может меняться. После того, как крутящий момент достигает этой точки, ECU больше не ограничивает частоту вращения изохронной частотой вращения. ECU дает команду дополнительного крутящего момента пропорционально разности между текущей частотой вращения и изохронной частотой вращения (то есть, в этом случае, K*(2200RPM - действующая частота вращения двигателя).
Легче всего посмотреть, каким образом ECU регулирует частоту вращения двигателя в ответ на повышение нагрузки посредством оценки кривых мощность/частота вращения вместо кривых крутящий момент/частота вращения. Мощность двигателя имеет значение крутящего момента двигателя, умноженного на частоту вращения двигателя с надлежащими коэффициентами преобразования для единиц измерения. ECU использует две кривых. Первая кривая показана на фиг. 4. На первой кривой, нет выброса мощности, и полная мощность двигателя доступна на изохронно регулируемой частоте вращения. Вторая кривая показана на фиг. 5 и изохронно регулирует частоту вращения двигателя на 2200 оборотах в минуту до тех пор, пока крутящий момент на выходном валу двигателя не достигает 1316 Н⋅м (303кВт). Для нагрузок двигателя выше такого уровня крутящего момента/мощности, ECU повышает крутящий момент двигателя на величину, пропорциональную разности между изохронной частотой вращения (2200 оборотов в минуту) и текущей частотой вращения двигателя (частота вращения двигателя определяется механической системой). Скорость, с которой повышается крутящий момент, такова, что двигатель достигает своей максимальной номинальной мощности на 2130 оборотах в минуту (317 кВт), как показано на фиг. 5. ECU рассчитывает крутящий момент, вырабатываемый двигателем, применяя известный командный уровень топливоснабжения к справочной таблице (предварительно определенной посредством испытаний), которая учитывает потери, так что сообщенный крутящий момент двигателя является доступным на коленчатом валу.
На основании вышеприведенного, следующие сигналы имеются в распоряжении у ECU 20:
a. SOC блока аккумуляторных батарей - из блока 31 управления аккумуляторными батареями через шину 30 CAN
b. средняя температура элементов блока аккумуляторных батарей - из блока 31 управления аккумуляторными батареями через шину 30 CAN
c. частота вращения электродвигателя/генератора - из блока 35 управления инвертором через шину 30 CAN
d. крутящий момент на выходном валу двигателя - внутренний расчет ECU
e. частота вращения двигателя - внутренний расчет ECU
ECU также способен давать команду блоку 35 управления инвертором вырабатывать требуемый крутящий момент в электродвигателе/генераторе 14. Эта команда отправляется через шину 30 CAN.
С сигналами, приведенными выше, ECU выполняет следующие вычисления:
ECU определяет, должен ли он пользоваться кривой мощность/частота вращения по фиг. 4 или фиг. 5 для регулирования частоты вращения двигателя. Если SOC блока аккумуляторных батарей является меньшим, чем 60%, ECU использует кривую мощность/частота вращения на фиг. 4 («быстрая подзарядка»). Если SOC блока аккумуляторных батарей является большим, чем 60%, ECU использует кривую мощность/частота вращения по фиг. 5 («полностью заряженный»).
ECU рассчитывает текущую мощность двигателя посредством умножения крутящего момента на выходном валу двигателя (Н⋅м) и частоты вращения двигателя (оборотов в минуту), на коэффициент преобразования.
ECU вычисляет «Hybrid_Shaping_Power», мощность, необходимую из гибридной системы, чтобы формировать общий крутящий момент транспортного средства как требуется, беря частоту вращения двигателя и применяя такой сигнал к справочной таблице (предварительно вычисленным значениям). Справочная таблица для каждого рабочего случая принимает частоту вращения двигателя и выводит мощность, как показано на фиг. 6.
ECU вычисляет величину мощности, которую он имеет в распоряжении для зарядки блока аккумуляторных батарей, вычитая текущую мощность двигателя и текущую гибридную поддержку из «номинальной мощности» (317 кВт или 303 кВт) в зависимости от выбранной кривой.
ECU 20 вычисляет максимальную мощность, которая может использоваться для разрядки и зарядки блока аккумуляторных батарей, применяя сигналы SOC блока аккумуляторных батарей и средней температуры элементов батареи к справочной таблице, которая выводит максимально допустимый ток разрядки и зарядки в этот момент времени (справочная таблица предварительно определена посредством испытаний). Эти токи затем умножаются на выходное напряжение блока аккумуляторных батарей, чтобы определить максимально допустимую мощность, которая должна использоваться для разрядки и зарядки. Мощность разрядки положительна, а мощность зарядки отрицательна.
Справочные таблицы определяются с учетом максимально допустимого тока заряда/разряда, который может термически выдерживать блок аккумуляторных батарей, когда SOC находится между 40% и 60%. Когда SOC находится ниже 40%, величина допустимого тока разряда линейно уменьшается от значения на 40% до 0 ампер при SOC 30%. когда SOC находится выше 60%, величина допустимого тока заряда линейно уменьшается от значения на 60% до 0 ампер при SOC 70%. Это делается, чтобы максимизировать срок службы блока аккумуляторных батарей.
ECU вычисляет команду крутящего момента гибридной системы (отправляемую в инвертор), как изложено ниже:
ECU 20 измеряет/вычисляет частоту вращения двигателя и крутящий момент двигателя (крутящий момент двигателя равносилен нагрузке).
ECU вычисляет требуемую мощность гибридной системы посредством вычитания имеющейся в распоряжении мощности двигателя из «Hybrid_Shaping_Power».
Если результат превышает значение максимально допустимой мощности разряда или является меньшим, чем значение максимально допустимой мощности разряда (мощность разрядки является отрицательной), мощность гибридной системы ограничивается значением максимально допустимой мощности разряда для разрядки блока аккумуляторных батарей во время гибридной поддержки или значением максимально допустимой мощности заряда во время зарядки блока аккумуляторных батарей.
Команда крутящего момента инвертора вырабатывается посредством деления команды гибридной мощности на частоту вращения электродвигателя/генератора в качестве сообщенной блоком управления инвертором (в рад/с) для расчета команды крутящего момента в единицах Н⋅м. ECU затем передает эту команду крутящего момента в блок 35 управления инвертором по шине 30 CAN.
Блок 31 управления аккумуляторными батареями вычисляет и передает SOC блока аккумуляторных батарей и температуры элементов батареи в ECU 20 через шину 30 CAN.
Блок 35 управления инвертором принимает команды крутящего момента из ECU 20 через шину 30 CAN и прикладывает ток к электродвигателю/генератору 14, чтобы вырабатывать запрошенный крутящий момент (для выдачи требуемой мощности зарядки или поддержки).
Традиционная эксплуатация комбайна должна вынуждать ECU изохронно управлять двигателем на требуемой частоте вращения. Частота вращения удерживается до тех пор, пока частота вращения двигателя не достигает «номинальной мощности» (меньшей, чем максимальная мощность двигателя). Как только мощность двигателя превышает «номинальную мощность» ECU предоставляет возможность линейного падения частоты вращения/повышения мощности до точки пиковой мощности, известной как выброс мощности. Крутизна выброса мощности критична при поддержании управления транспортного средства и «ощущения» транспортного средства водителем. Желательно делать «номинальную мощность» как можно более высокой, чтобы повышать производительность и увеличивать экономию топлива, но она должна согласовываться с крутизной выброса мощности и имеющейся в распоряжении мощностью двигателя.
В гибридной системе по варианту осуществления, энергия накапливается в блоке аккумуляторных батарей и используется для обеспечения выброса мощности. В течение времени меньшего, чем время при номинальной нагрузке, блок аккумуляторных батарей заряжается с восстановлением предшествующего состояния. Это предоставляет «номинальной мощности» возможность устанавливаться выше для одного и того же двигателя, не принося в жертву выброс мощности.
Желательно использовать мощность блока аккумуляторных батарей как можно меньше, чтобы продлевать срок службы аккумуляторных батарей и использовать наименьшую величину мощности. Может быть полезным использовать блок аккумуляторных батарей, который может только поддерживать требуемый выброс мощности.
Фиг. 7 и 8 иллюстрируют два рабочих состояния для гибридной системы. Условные обозначения для фигур являются следующими:
«Двигатель IC, 9,0 литров» указывает ссылкой на кривую для 9,0-литрового дизельного двигателя.
«Подъем 9,0-литрового двигателя IC» указывает ссылкой на специальные условия эксплуатации, где дополнительная мощность отбирается из 9,0-литрового дизельного двигателя.
«Электрический» указывает ссылкой на гибридную поддержку, то есть, мощность, выдаваемую блоком аккумуляторных батарей и электродвигателем/генератором, положительную или отрицательную.
«Электрический подъем» указывает ссылкой на специальные условия эксплуатации, где дополнительная мощность отбирается из гибридной поддержки, то есть, мощность, выдаваемую блоком аккумуляторных батарей и электродвигателем/генератором.
«Комбинированный IC и электрический» указывает ссылкой на комбинированную кривую, показывающую сумму мощности или крутящего момента из двигателя IC и гибридной поддержки, то есть, мощность, выдаваемую блоком аккумуляторных батарей и электродвигателем/генератором, положительную или отрицательную.
«Комбинированный подъем IC и электрический» указывает ссылкой на комбинированную кривую, показывающую сумму мощности или крутящего момента от двигателя IC и гибридной поддержки во время специальных условий эксплуатации, описанных в материалах настоящей заявки в качестве подъема.
Когда SOC находится между 30% и 60%, ECU 20 дает команду кривой мощности двигателя и гибридной мощности электродвигателя/генератора, как показано на фиг. 7. Двигатель выдает максимальную мощность 317 кВт на изохронной частоте вращения 2200 оборотов в минуту, а блок аккумуляторных батарей обеспечивает выброс мощности. Гибридная система осуществляет заряд на уровне мощности требуемого выброса мощности минус доступная мощность разряда, являющаяся функцией SOC аккумуляторной батареи и температуры элемента аккумуляторной батареи, на изохронной частоте вращения, линейно уменьшая зарядку с -14 кВт до 33 кВт по мере того, как частота вращения двигателя падает (давая в результате большую кажущуюся мощность у транспортного средства). Это устанавливает кажущуюся «номинальную мощность» комбинации в комбинированную мощность 303 кВт, причем 14 кВт мощности двигателя заряжают гибридную систему, то есть блок аккумуляторных батарей. Таким образом, требуемый выброс мощности всегда может обеспечиваться вплоть до комбинированной мощности 346 кВт. Если частота вращения двигателя находится на изохронной частоте вращения, а нагрузка двигателя является меньшей, чем «номинальная мощность», гибридная система будет заряжаться на уровне мощности, равном разности между «номинальной мощностью» и текущей мощностью двигателя, поддерживая двигатель полностью нагруженным.
Когда SOC находится выше 60%, ECU дает команду мощности кривой двигателя находиться на уровне мощности в 303 кВт на изохронной частоте вращения ниже максимальной мощности 317 кВт, как показано на фиг. 8. Гибридная система обеспечивает поддержку в ноль кВт до тех пор, пока двигатель не попадает на пиковую мощность 317 кВт приблизительно на 2130 оборотах в минуту с номинальной мощности 303 кВт на изохронной частоте вращения 2200 оборотов в минуту, а затем гибридная поддержка линейно повышается до 33 кВт. Частота вращения двигателя, при которой начинается гибридная поддержка, выбирается ниже частоты вращения, на которой типично работают водители (2150 оборотов в минуту или выше - частота вращения, на которую обычно нацелены водители). Это делается, чтобы ограничивать величину зарядки/разрядки блока аккумуляторных батарей и продлевать срок службы блока аккумуляторных батарей.
Это устанавливает номинальную мощность комбайна в мощность 303 кВт, с выбросом мощности, обеспечиваемым гибридной системой до комбинированной мощности 346 кВт.
Фиг. 7 и 8 иллюстрируют мощность «подъема». Мощность подъема обеспечивается двигателем IC и гибридной поддержкой для определенных условий эксплуатации. Например, когда комбайн разгружается во время работы, зерно перемещается из бункера для зерна комбайна в грузовик наряду с тем, что оба, комбайн и грузовик, движутся во время работы комбайна. Выгрузка зерна требует мощности для приведения в действие шнеков. С тем, чтобы не требовать, чтобы комбайн замедлялся, функция подъема показана пунктирными линиями на фиг. 7 и 8. На фиг. 7, подъем обеспечивается на 11 кВт из гибридной поддержки и 14 кВт из двигателя IC, который больше не заряжает блок аккумуляторных батарей во время этой операции. На фиг. 8, подъем обеспечивается на 11 кВт из гибридной поддержки и 14 кВт из двигателя IC.
Фиг. 9A и 9B иллюстрируют пример иллюстративных этапов способа. На этапе S100, ECU и/или блок управления аккумуляторными батареями контролирует ток блока аккумуляторных батарей, выходное напряжение постоянного тока и среднюю температуру элемента батареи, и рассчитывает состояние заряда (SOC) блока аккумуляторных батарей. На этапе S104 состояние заряда сравнивается со значением 60%. Если SOC блока аккумуляторных батарей является большим, чем 60%, на этапе S108, двигатель управляется согласно второй кривой с выбросом мощности, который изохронно ограничивает частоту вращения двигателя, как показано на фиг. 5. Если SOC блока аккумуляторных батарей является большим, чем 60%, на этапе S108, двигатель управляется согласно второй кривой с выбросом мощности, который изохронно ограничивает частоту вращения двигателя, как показано на фиг. 4. На этапе S116 после этапа S108 или этапа S112, текущая мощность двигателя рассчитывается посредством умножения крутящего момента на выходном валу двигателя и частоты вращения двигателя, на коэффициент преобразования. После этапа S116, на этапе S120, «Hybrid_Shaping_Power», необходимая из гибридной системы для формирования общего крутящего момента транспортного средства как требуется, рассчитывается посредством применения сигнала текущей частоты вращения двигателя к справочной таблице. На этапе S124, максимальная мощность, которая может использоваться для разрядки и зарядки блока аккумуляторных батарей, рассчитывается посредством применения SOC блока аккумуляторных батарей и сигналов средней температуры элементов батареи к справочной таблице. Что касается зарядки, на этапе S128, величина мощности, имеющейся в распоряжении для зарядки блока аккумуляторных батарей, рассчитывается вычитанием текущей мощности двигателя и текущей гибридной поддержки из «номинальной мощности» (317 кВт или 303 кВт в зависимости от выбранной кривой). На этапе S132, требуемая мощность гибридной системы сравнивается с максимально допустимой мощностью заряда, и если требуемая мощность гибридной системы является меньшей (более отрицательной), чем максимально допустимая мощность заряда, команда мощности гибридной системы ограничивается максимально допустимой мощностью заряда. После этапа S124, для электросиловой поддержки, на S136, рассчитывают требуемую мощность гибридной системы посредством вычитания имеющейся в распоряжении мощности двигателя из «Hybrid_Shaping_Power». Затем, на S140, требуемая мощность гибридной системы сравнивается с максимально допустимой мощностью разряда, и если требуемая мощность гибридной системы превышает максимально допустимую мощность разряда, команда мощности гибридной системы ограничивается максимально допустимой мощностью разряда. Затем, на этапе S144, команда крутящего момента инвертора вырабатывается посредством деления команды мощности гибридной системы на частоту вращения электродвигателя/генератора в качестве сообщенной блоком 35 управления инвертором (в рад/с) для расчета команды крутящего момента в единицах Н⋅м. На этапе S148, блок 35 инвертора применяет команду крутящего момента к справочной таблице (предварительно определенной посредством испытаний), которая задает величину и фазовый угол тока, необходимые, чтобы заставить электродвигатель/генератор вырабатывать такой крутящий момент.
Из вышеизложенного, будет замечено, что многочисленные варианты и модификации могут быть осуществлены, не выходя из сущности и объема изобретения. Должно быть понятно, что не обозначены и не должны подразумеваться никакие ограничения в отношении конкретного устройства, проиллюстрированного в материалах настоящей заявки.
Изобретение относится к гибридным приводам. Система гибридного привода для комбайна содержит двигатель с блоком управления; блок аккумуляторных батарей; электродвигатель/генератор, работающий в двух режимах попеременно; блок управления электродвигателем/генератором и блок управления гибридной системой. Блок управления гибридной системой принимает сигнал состояния заряда блока аккумуляторных батарей и сигнал текущей нагрузки двигателя и частоты вращения двигателя. В зависимости от этих сигналов отправляет команду крутящего момента в блок управления электродвигателем/генератором для обеспечения требуемой комбинированной кривой частоты вращения/крутящего момента из двигателя и электродвигателя/генератора. Блок управления двигателем обеспечивает управление частотой вращения двигателя на заданной изохронной частоте. Улучшаются характеристики комбайна. 7 н. и 14 з.п. ф-лы, 9 ил.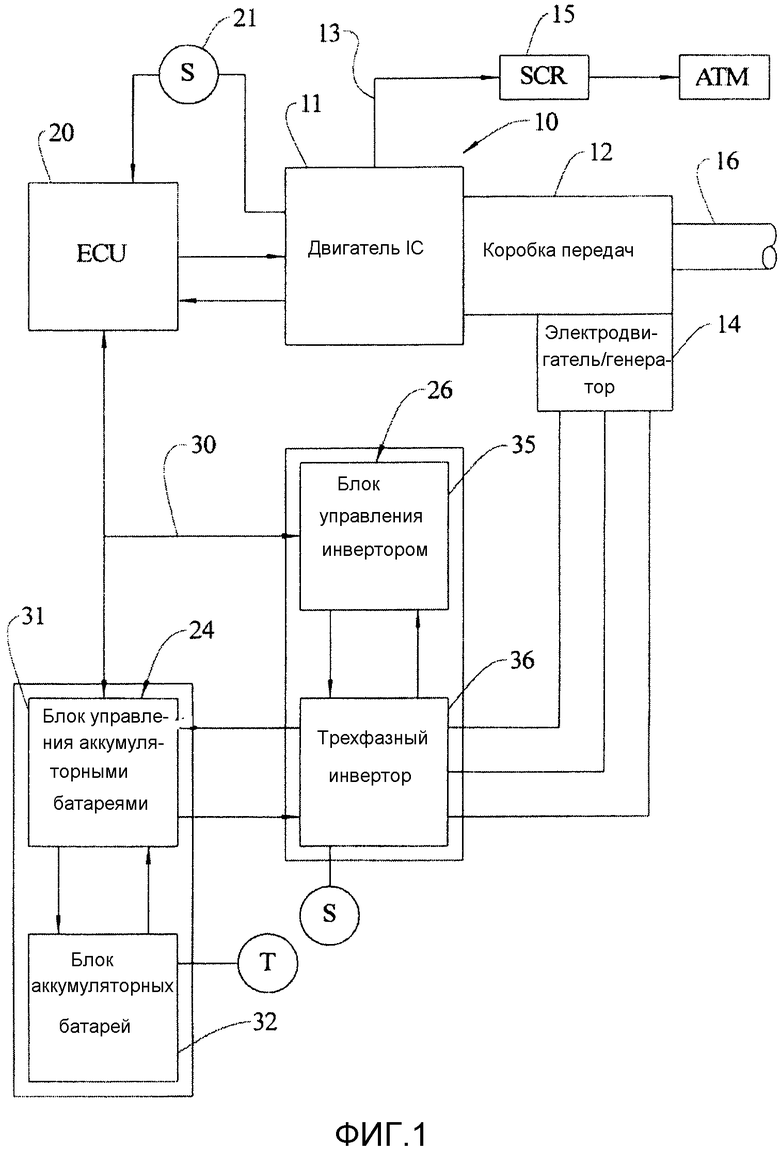
1. Система гибридного привода для комбайна, содержащая:
двигатель, приводящий в действие выходное устройство;
блок управления двигателем, формирующий текущий сигнал нагрузки двигателя и сигнал частоты вращения двигателя;
блок аккумуляторных батарей;
электродвигатель/генератор, присоединенный к выходному устройству и предназначенный для работы в двух режимах попеременно, причем электродвигатель/генератор используется в качестве электродвигателя для приведения в действие выходного устройства, а при использовании в качестве генератора приводится в действие выходным устройством;
блок управления электродвигателем/генератором, который является сигнально соединенным с электродвигателем и с генератором, чтобы управлять работой электродвигателя/генератора системы гибридного привода;
блок управления гибридной системой; и
при этом блок управления гибридной системой принимает сигнал состояния заряда (SOC) блока аккумуляторных батарей от блока аккумуляторных батарей, а также принимает сигнал текущей нагрузки двигателя и частоты вращения двигателя из блока управления двигателем и в зависимости от сигнала состояния заряда (SOC), сигнала текущей нагрузки двигателя и сигнала частоты вращения двигателя отправляет команду крутящего момента в блок управления электродвигателем/генератором, чтобы обеспечивать требуемую комбинированную кривую частоты вращения/крутящего момента из двигателя и электродвигателя/генератора,
при этом блок управления двигателем обеспечивает управление частотой вращения двигателя на заданной изохронной частоте.
2. Система по п. 1, в которой, если сигнал состояния заряда аккумуляторной батареи ниже заданной величины, кривая топливоснабжения двигателя устанавливается блоком управления двигателем, чтобы обеспечивать максимальную мощность двигателя на изохронной частоте вращения, и если сигнал состояния заряда SOC блока аккумуляторных батарей выше заданной величины, кривая топливоснабжения двигателя понижается и блок управления электродвигателем/генератором не управляет электродвигателем до тех пор, пока частота вращения двигателя не упадет ниже заданного значения и ниже изохронной частоты.
3. Система по п. 1, в которой
гибридная система включает в себя блок управления блоком аккумуляторных батарей, который непрерывно контролирует ток аккумуляторных батарей, напряжение отдельного элемента батареи и температуру отдельного элемента батареи и по этим измерениям вычисляет состояние заряда (SOC) аккумуляторной батареи, при этом блок управления блоком аккумуляторных батарей также измеряет выходное напряжение постоянного тока и передает значение состояния заряда SOC, среднюю температуру элемента батареи как сумму всех температур элементов батареи, деленную на количество элементов батареи, в блок управления гибридной системы.
4. Система по п. 1, в которой
блок управления электродвигателем/генератором содержит инвертор, причем блок управления электродвигателем/генератором принимает команду крутящего момента из блока управления гибридной системы, инвертор принимает эту команду крутящего момента и применяет указанное значение к справочной таблице, которая задает величину и фазовый угол тока, необходимые, чтобы побудить электродвигатель/генератор вырабатывать такой крутящий момент, инвертор затем использует регулирование тока для генерирования токов в электродвигателе/генераторе, который вырабатывает требуемый крутящий момент на выходе, в зависимости от команды крутящего момента поток энергии может быть либо из блока аккумуляторных батарей преобразован в механическую энергию на выходе двигателя, или поток может преобразовывать механическую энергию из двигателя в выходную электрическую энергию, которая затем накапливается в блоке аккумуляторных батарей, инвертор также сопрягается с датчиком положения на электродвигателе/генераторе, чтобы вычислять частоту вращения электродвигателя/генератора.
5. Система по п. 1, в которой
электродвигатель/генератор присоединен к выходному устройству через коробку передач, и крутящий момент, вырабатываемый электродвигателем/генератором, прибавляется/вычитается к/из крутящему моменту двигателя, а частота вращения электродвигателя/генератора имеет постоянное отношение к частоте вращения двигателя.
6. Система по п. 1, в которой
когда аккумуляторная батарея заряжена до определенной величины SOC, блок управления двигателем управляет топливоснабжением двигателя, для чего блок управления двигателем осуществляет мониторинг количества топлива, которое подается, а также мониторинг частоты вращения двигателя, причем топливоснабжение управляется так, что частота вращения изохронно удерживается на выбранной изохронной частоте вращения при выбросе мощности, при этом блок управления двигателем регулирует частоту вращения двигателя до тех пор, пока крутящий момент двигателя не достигнет номинального режима, а после того, как крутящий момент достигнет номинального режима, блок управления двигателем больше не удерживает частоту вращения на изохронной частоте вращения, блок управления двигателем дает команду на подачу дополнительного крутящего момента пропорционально разности между текущей частотой вращения и изохронной частотой вращения.
7. Система по п. 1, в которой блок управления двигателем обеспечивает подачу команды блоку управления электродвигателем/генератором на формирование требуемого крутящего момента в электродвигателе/генераторе через асинхронную последовательную коммуникационную CAN - шину.
8. Система гибридного привода для комбайна, содержащая:
двигатель, приводящий в действие выходное устройство;
блок управления двигателем, формирующий текущий сигнал нагрузки двигателя и сигнал частоты вращения двигателя;
блок аккумуляторных батарей;
электродвигатель/генератор, присоединенный к выходному устройству и предназначенный для работы в двух режимах попеременно, причем электродвигатель/генератор используется в качестве электродвигателя для приведения в действие выходного устройства, а при использовании в качестве генератора приводится в действие выходным устройством;
блок управления электродвигателем/генератором, который является сигнально соединенным с электродвигателем и с генератором, чтобы управлять работой электродвигателя/генератора системы гибридного привода;
блок управления гибридной системой; и
при этом блок управления гибридной системой принимает сигнал состояния заряда (SOC) блока аккумуляторных батарей от блока аккумуляторных батарей, а также принимает сигнал текущей нагрузки двигателя и частоты вращения двигателя из блока управления двигателем и в зависимости от сигнала состояния заряда (SOC), сигнала текущей нагрузки двигателя и сигнала частоты вращения двигателя отправляет команду крутящего момента в блок управления электродвигателем/генератором, чтобы обеспечивать требуемую комбинированную кривую частоты вращения/крутящего момента из двигателя и электродвигателя/генератора,
при этом блок управления двигателем выполняет следующие вычисления:
блок управления двигателем определяет, должна ли использоваться первая или вторая кривая мощность/частота вращения для регулирования частоты вращения двигателя, и если SOC блока аккумуляторных батарей является меньшим, чем первая заданная величина, блок управления двигателем использует первую кривую мощность/ частота вращения;
если SOC блока аккумуляторных батарей является большим, чем первая заданная величина, блок управления двигателем использует вторую кривую мощность/частота вращения;
блок управления двигателем вычисляет текущую мощность двигателя посредством умножения крутящего момента на выходе двигателя и частоты вращения двигателя, и коэффициента преобразования;
блок управления двигателем вычисляет мощность, необходимую из привода, путем приложения сигнала частоты вращения двигателя к первой справочной таблице предварительно вычисленных значений для определения сигнала мощности;
блок управления двигателем вычисляет максимальную мощность, которая затем может использоваться для разрядки и зарядки блока аккумуляторных батарей, применяя сигналы SOC блока аккумуляторных батарей и средней температуры элементов батареи к второй справочной таблице значений, предварительно определенных посредством испытаний, которая выводит максимально допустимый ток разрядки и зарядки, причем эти токи затем умножаются на выходное напряжение блока аккумуляторных батарей для определения максимально допустимой мощности, которая должна использоваться для разрядки и зарядки;
блок управления двигателем вычисляет величину мощности, требуемую для электродвигателя/генератора, путем вычитания текущей мощности двигателя из сигнала мощности;
если требуемая мощность электродвигателя/генератора превышает максимально допустимую мощность разряда или является меньшей, чем максимально допустимая мощность заряда, мощность электродвигателя/генератора ограничивается максимально допустимой мощностью разряда или максимально допустимой мощностью заряда.
9. Способ по п. 8, в котором блок управления двигателем вычисляет величину мощности, которая имеется в наличии для зарядки аккумуляторной батареи путем вычитания текущей мощности двигателя и текущей мощности электродвигателя/генератора из номинальной мощности в зависимости от первой или второй выбранной кривой мощность-скорость,
команду крутящего момента вырабатывают посредством деления команды мощности электродвигателя/генератора на частоту вращения электродвигателя/генератора, сформированного инвертором.
10. Способ по п. 9, в котором, когда SOC находится ниже 40%, величина допустимого тока разряда линейно уменьшается от значения 40% до 0 ампер при SOC 30%; и
когда SOC находится выше 60%, величина допустимого тока заряда линейно уменьшается от значения 60% до 0 ампер при SOC 70%.
11. Система гибридного привода для комбайна, содержащая:
двигатель, приводящий в действие выходное устройство;
блок управления двигателем, формирующий текущий сигнал нагрузки двигателя и сигнал частоты вращения двигателя;
блок аккумуляторных батарей;
электродвигатель/генератор, присоединенный к выходному устройству и предназначенный для работы в двух режимах попеременно, причем электродвигатель/генератор используется в качестве электродвигателя для приведения в действие выходного устройства, а при использовании в качестве генератора приводится в действие выходным устройством;
блок управления электродвигателем/генератором, который является сигнально соединенным с электродвигателем и с генератором, чтобы управлять работой электродвигателя/генератора системы гибридного привода;
блок управления гибридной системой; и
при этом блок управления гибридной системой принимает сигнал состояния заряда (SOC) блока аккумуляторных батарей от блока аккумуляторных батарей, а также принимает сигнал текущей нагрузки двигателя и частоты вращения двигателя из блока управления двигателем и
в зависимости от сигнала состояния заряда (SOC), сигнала текущей нагрузки двигателя и сигнала частоты вращения двигателя отправляет команду крутящего момента в блок управления электродвигателем/генератором, чтобы обеспечивать требуемую комбинированную кривую частоты вращения/крутящего момента из двигателя и электродвигателя/генератора,
при этом, когда SOC аккумуляторной батареи составляет от 60% до 70%, причем способность заряжать аккумуляторную батарею линейно снижается до 0% для сохранения срока службы аккумуляторной батареи, когда SOC составляет от 30% до 40%, способность разряжать аккумуляторную батарею линейно снижается до 0% для сохранения срока службы аккумуляторной батареи, когда SOC находится между 40% и 60%, аккумуляторная батарея может обеспечивать полную способность зарядки и разрядки.
12. Система гибридного привода для комбайна, содержащая:
двигатель, приводящий в действие выходное устройство;
блок управления двигателем, формирующий текущий сигнал нагрузки двигателя и сигнал частоты вращения двигателя;
блок аккумуляторных батарей;
электродвигатель/генератор, присоединенный к выходному устройству и предназначенный для работы в двух режимах попеременно, причем электродвигатель/генератор используется в качестве электродвигателя для приведения в действие выходного устройства, а при использовании в качестве генератора приводится в действие выходным устройством;
блок управления электродвигателем/генератором, который является сигнально соединенным с электродвигателем и с генератором, чтобы управлять работой электродвигателя/генератора системы гибридного привода;
блок управления гибридной системой; и
при этом блок управления гибридной системой принимает сигнал состояния заряда (SOC) блока аккумуляторных батарей от блока аккумуляторных батарей, а также принимает сигнал текущей нагрузки двигателя и частоты вращения двигателя из блока управления двигателем и
в зависимости от сигнала состояния заряда (SOC), сигнала текущей нагрузки двигателя и сигнала частоты вращения двигателя отправляет команду крутящего момента в блок управления электродвигателем/генератором, чтобы обеспечивать требуемую комбинированную кривую частоты вращения/крутящего момента из двигателя и электродвигателя/генератора, при этом блок управления двигателем изохронно регулирует двигатель на требуемой изохронной частоте вращения;
изохронная частота вращения удерживается до тех пор, пока частота вращения двигателя не достигает номинальной мощности;
как только нагрузка двигателя превышает номинальную мощность, блок управления двигателем предоставляет возможность линейного падения частоты вращения и соответствующее повышение мощности до точки пиковой мощности.
13. Система гибридного привода для комбайна, содержащая:
двигатель, имеющий вращательное выходное устройство;
блок управления двигателем;
блок аккумуляторных батарей;
трехфазный инвертор и блок управления инвертором;
электродвигатель/генератор, присоединенный к вращательному выходному устройству и предназначенный для работы в двух режимах попеременно;
блок управления гибридной системой, в котором блок управления гибридной системой принимает оценку SOC для блока аккумуляторных батарей, напряжение блока аккумуляторных батарей, ток блока аккумуляторных батарей и предельные значения безопасного рабочего тока в/из блока аккумуляторных батарей, и блок управления гибридной системой также принимает текущую оценку нагрузки двигателя и частоту вращения двигателя из блока управления двигателем и
в зависимости от этих переменных команда крутящего момента направляется в блок управления инвертором, чтобы обеспечивать требуемую комбинированную кривую частоты вращения/крутящего момента для двигателя и электродвигателя,
при этом блок управления двигателем обеспечивает управление частотой вращения двигателя на заданной изохронной частоте.
14. Система по п. 13, в которой, когда аккумуляторная батарея может заражаться, кривая топливоснабжения двигателя устанавливается, чтобы обеспечивать максимальную мощность двигателя на изохронной частоте вращения, блок аккумуляторных батарей заряжается и обеспечивает выброс мощности по требованию, в качестве комбинации мощности аккумуляторной батареи и медленного высвобождения мощности зарядки аккумуляторной батареи по мере того, как частота вращения двигателя падает, когда блок аккумуляторных батарей полностью заряжен, кривая топливоснабжения двигателя понижается так, что мощность аккумуляторной батареи не привлекается до тех пор, пока частота вращения двигателя не падает ниже заданного значения, которое ниже, чем изохронная скорость.
15. Система по п. 13, в которой
блок аккумуляторных батарей непрерывно контролирует ток аккумуляторных батарей, напряжение отдельного элемента батареи и температуру отдельного элемента батареи, по этим измерениям блок аккумуляторных батарей вычисляет состояние заряда аккумуляторной батареи (SOC), причем блок аккумуляторных батарей также измеряет выходное напряжение постоянного тока, причем аккумуляторная батарея сообщает значение своего SOC, среднюю температуру элемента батареи и выходное напряжение в ECU по шине CAN.
16. Система по п. 13, в которой
блок управления инвертором обеспечивает прием команды крутящего момента по шине CAN из ECU и применяет значение команды крутящего момента к справочной таблице, которая определяет величину и фазовый угол тока, необходимые, чтобы побуждать электродвигатель/генератор подключаться для вырабатывания указанного крутящего момента,
причем блок управления инвертором затем использует регулирование тока для генерирования этих токов в электродвигателе/генераторе, который затем вырабатывает требуемый крутящий момент на валу в зависимости от команды крутящего момента, причем поток энергии может быть либо из аккумуляторной батареи, преобразованный в механическую энергию для поддержки двигателя, или поток может преобразовать механическую энергию в электрическую, которая затем накапливается в аккумуляторной батарее.
17. Система по п. 13, в которой:
электродвигатель/генератор присоединен к двигателю, причем крутящий момент, вырабатываемый электродвигателем/генератором, прибавляется/вычитается к крутящему моменту двигателя, а частота вращения электродвигателя/генератора имеет постоянное отношение к частоте вращения двигателя.
18. Тяговый привод для уборочного комбайна, содержащий:
двигатель внутреннего сгорания, имеющий мощность менее чем 560 кВт при номинальной скорости, и максимальную мощность более чем 560 кВт при максимальной скорости, которая больше номинальной скорости;
электродвигатель;
по меньшей мере одну аккумуляторную батарею, при этом аккумуляторная батарея выполнена с возможностью приводить в действие электродвигатель;
блок управления, который побуждает по меньшей мере одну аккумуляторную батарею питать электродвигатель, при этом электродвигатель соединен с двигателем внутреннего сгорания, чтобы обеспечивать тяговый привод мощностью выше 600 кВт при максимальной частоте вращения.
19. Тяговый привод по п. 18, в котором двигатель внутреннего сгорания осуществляет выпуск в систему снижения токсичности выбросов, имеющую блок селективного снижения количества катализатора (SCR) и не имеющую блок сажевого фильтра (DPF), и не имеющую блок рециркуляции выхлопных газов (EGR).
20. Тяговый привод по п. 18, в котором двигатель внутреннего сгорания содержит двигатель с рабочим объемом 13,5 литров.
21. Тяговый привод для уборочного комбайна, содержащий:
двигатель внутреннего сгорания, имеющий мощность менее чем 560 кВт при номинальной скорости, и максимальную мощность более чем 560 кВт при максимальной скорости или менее,
электродвигатель;
по меньшей мере одну аккумуляторную батарею, при этом аккумуляторная батарея выполнена с возможностью приводить в действие электродвигатель;
блок управления, который побуждает по меньшей мере одну аккумуляторную батарею питать электродвигатель, при этом электродвигатель соединен с двигателем внутреннего сгорания, чтобы обеспечивать тяговый привод мощностью выше 560 кВт,
уровень мощности двигателя на номинальной частоте вращения установлен 480 кВт;
при понижении кривой крутящего момента до второй скорости, которая меньше номинальной скорости, мощность двигателя плавно повышается до 500 кВт и, в дополнение, электрический привод наращивает мощность линейно от 0 кВт при номинальной скорости до около 40 кВт при второй скорости двигателя для комбинированной мощности около 540 кВт при второй скорости двигателя; и
если перегрузка происходит выше 540 кВт, двигатель наращивает мощность до пиковой мощности около 560 кВт при третьей скорости двигателя, которая меньше второй скорости двигателя, а электрический привод наращивает мощность до около 50 кВт для комбинированной мощности выше 600 кВт при третьей скорости двигателя.
| WO 2013022816 A1, 14.02.2013 | |||
| US 5327992 A, 12.07.1994 | |||
| US 2007255477 A1, 01.11.2007 | |||
| СПОСОБ ОБЛУЧЕНИЯ МИНЕРАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2341596C2 |
| US 2011066308 A1, 17.03.2011. | |||

