Область техники, к которой относится изобретение
Настоящее изобретение относится к космическому двигательному модулю.
Таким космическим двигательным модулем можно оборудовать, например, космические аппараты, такие как спутники, зонды, или верхние ракетные ступени. В частности, он представляет особый интерес для обеспечения перехода на другую орбиту.
Уровень техники
Спутники и другие космические аппараты обычно оборудованы двигателями, обеспечивающими их маневры в космическом пространстве. В частности, ракеты-носители не всегда доставляют свои полезные грузы на их номинальные рабочие орбиты, которые иногда удалены на очень большие расстояния. В этом случае ракеты-носители оставляют свои полезные грузы на промежуточной эллиптической орбите, перигей которой находится относительно близко от Земли, тогда как апогей находится на высоте рабочей орбиты: в этом случае двигатели космического аппарата корректируют его траекторию для попадания на предусмотренную рабочую орбиту.
Часто эти двигатели являются химическими двигателями на жидком топливе: эти химические двигатели могут обеспечивать большие ускорения порядка нескольких g или нескольких десятков g, но обладают довольно слабым удельным импульсом. Удельный импульс (Isp) пропорционален соотношению между тягой двигателя и массовым расходом топлива: в определенной степени он отражает энергетическую эффективность двигателя. Оборудованные таким образом космические аппараты быстро достигают рабочей орбиты, но должны нести при этом большую массу топлива, что значительно повышает стоимость запуска.
Однако в последние несколько лет были разработаны электрические двигатели: эти двигатели производят тягу за счет разгона и выброса заряженных частиц, в частности, ионов. Эти электрические двигатели обладают более высоким удельным импульсом, приблизительно в 5-10 раз превышающим удельный импульс химических двигателей. С другой стороны, они обеспечивают очень слабые ускорения, порядка 10-5 g. Оборудованные таким образом космические аппараты несут меньше топлива на борту, что позволяет выводить на околоземную орбиту больший полезный груз или снизить стоимость запуска. С другой стороны, установка в требуемое положение занимает намного больше времени, как правило, от 8 до 9 месяцев и, следовательно, задерживает введение в строй спутника, что является существенным коммерческим недостатком. Кроме того, поскольку коррекция траектории является более медленной, космический аппарат во время длительного периода многократно пролетает внутри радиационного пояса Ван Аллена, пересекающего переходную орбиту: следовательно, космический аппарат подвергается риску повреждения от радиации и требует наличия специальной экранирующей защиты.
Таким образом, существует реальная потребность в космическом аппарате нового типа, оборудованном двигательной системой, которая по меньшей мере частично не имеет недостатков вышеупомянутых известных двигательных систем.
Раскрытие изобретения
Объектом настоящего изобретения является космический двигательный модуль, содержащий твердотопливный химический двигатель, имеющий главный корпус, и по меньшей мере один электрический двигатель, при этом упомянутый по меньшей мере один электрический двигатель установлен на упомянутом главном корпусе твердотопливного химического двигателя.
Твердотопливные химические двигатели, в дальнейшем называемые просто твердотопливными двигателями, обеспечивают диапазон тяги, сравнимый с химическими двигателями, работающими на жидком топливе: таким образом, ими легко заменить жидкостные реактивные двигатели при применении для создания сильной тяги, в частности, в качестве главного двигателя космического аппарата. Предпочтительно их применяют, когда маневры необходимо осуществлять быстро: например, речь может идти о маневре выхода космического аппарата из неблагоприятной для него окружающей среды, такой как радиационные пояса, или об экстренном маневре.
Кроме того, твердотопливные двигатели являются менее сложными, более простыми в применении и, следовательно, менее дорогими, чем их жидкостные аналоги. В частности, упрощается хранение твердого ракетного топлива: оно не требует герметизированных баков, трубопроводов подачи, изолирующих или регулировочных вентилей или предварительного подогрева. Оно не требует также раздельного хранения двух компонентов топлива или устройства для их смешивания перед сжиганием. Кроме упрощения, эти твердотопливные двигатели позволяют уменьшить массу выводимых на орбиту устройств, что позволяет соответственно увеличить полезную массу аппарата и является еще одним экономическим преимуществом. Кроме того, как правило, твердое топливо является менее токсичным, чем жидкое топливо, что позволяет снизить ограничения экологического характера.
Что касается электрических двигателей, то они создают намного меньшую тягу, но имеют при этом большой удельный импульс Isp: следовательно, их можно применять вместо химических двигателей для более длительных маневров, во время которых вектор скорости аппарата существенно меняется только по истечении большого периода времени.
Таким образом, двигательный модуль сочетает в себе преимущества твердотопливных двигателей и электрических двигателей и снижает влияние их соответствующих недостатков за счет использования специфики различных осуществляемых маневров.
Например, в контексте перехода с орбиты на орбиту такой двигательный модуль представляет особый интерес, так как он может поочередно использовать свой твердотопливный двигатель или свой электрический двигатель, чтобы развивать сильную тягу или, наоборот, большой удельный импульс Isp в зависимости от своего положения, то есть, например, от радиационных поясов или от характеристик своей траектории. Такой модуль позволяет устанавливать в требуемое положение более значительный полезный груз, сохраняя при этом приемлемое время перехода и задерживая лишь не намного введение в строй спутника, причем это время перехода, как правило, не превышает 2-3 месяца. Естественно, в случае необходимости, можно также использовать одновременно твердотопливный и электрический двигатели.
Наконец, такая конфигурация, при которой электрический двигатель установлен на главном корпусе твердотопливного химического двигателя, является исключительно компактной и обеспечивает двигательному модулю возможность интегрирования, которая увеличивает его автономность и позволяет, не внося существенных изменений, оборудовать таким модулем широкий спектр космических аппаратов, для которых требуется такая функция обеспечения движения.
В некоторых вариантах выполнения главный корпус твердотопливного химического двигателя выполнен из композитного материала. Действительно, материалы такого типа позволяют получить большой выигрыш в массе, что позволяет нести на борту более значительную полезную массу.
В некоторых вариантах выполнения твердотопливный химический двигатель содержит заряд топлива, хранящийся в главном корпусе, реактивное сопло и электронный блок питания и регулирования.
В некоторых вариантах выполнения реактивное сопло твердотопливного химического двигателя является ориентируемым. Предпочтительно его можно оборудовать двумя электромеханическими домкратами, обеспечивающими управление траекторией при вращении вокруг вертикальной оси и вокруг продольной оси.
В некоторых вариантах выполнения электрический двигатель установлен на главном корпусе твердотопливного химического двигателя при помощи крепежной конструкции, содержащей верхний фланец, предусмотренный на уровне верхнего конца главного корпуса твердотопливного химического двигателя, и нижний фланец, предусмотренный на уровне нижнего конца главного корпуса твердотопливного химического двигателя. Применение таких фланцев позволяет сгруппировать большинство креплений в зонах небольшого размера, что обеспечивает лучшую общую рационализацию, в частности, лучший контроль механических напряжений, связанных с креплением электрического двигателя на твердотопливном двигателе. В частности, эта фланцы могут иметь конструкцию и/или геометрию, позволяющую выдерживать и даже демпфировать (при вибрациях) механические усилия, избегая повреждения главного корпуса твердотопливного двигателя.
В некоторых вариантах выполнения верхний фланец является стяжным цилиндрическим фланцем, установленным на главном корпусе.
В некоторых вариантах выполнения верхний фланец является кольцевым фланцем, установленным на верхней юбке главного корпуса твердотопливного химического двигателя.
В некоторых вариантах выполнения верхний фланец является бортиком, образующим выступ вдоль верхнего контура главного корпуса твердотопливного химического двигателя. Предпочтительно речь может идти о простом утолщении боковой стенки главного корпуса, предусмотренном вдоль его верхнего края.
В некоторых вариантах выполнения нижний фланец является стяжным цилиндрическим фланцем, установленным на главном корпусе. Этот цилиндрический фланец можно установить легко, в частности, путем стягивания вокруг главного корпуса, избегая повреждения этого главного корпуса.
В некоторых вариантах выполнения нижний фланец является стяжным цилиндрическим фланцем, установленным на нижней юбке главного корпуса.
В других вариантах выполнения нижний фланец является бортиком, образующим выступ вдоль нижнего контура главного корпуса твердотопливного химического двигателя.
В некоторых вариантах выполнения электрический двигатель содержит электрический двигательный блок и резервуар с рабочим телом. Двигательный блок может быть блоком любого известного типа и, в частности, стационарным плазменным двигателем; рабочее тело может иметь разную природу и, в частности, может быть ксеноном, криптоном, аргоном или смесью этих элементов.
В некоторых вариантах выполнения электрический двигатель дополнительно содержит каскад регулирования давления, расположенный между резервуаром рабочего тела и электрическим двигательным блоком.
В некоторых вариантах выполнения электрический двигательный блок закреплен на нижнем фланце и ориентирован в заднем направлении модуля. Это положение обеспечивает движение модуля вперед и позволяет ограничить риск выброса частиц из электрического двигательного блока на твердотопливный двигатель.
В некоторых вариантах выполнения резервуар рабочего тела закреплен на нижнем и верхнем фланцах.
В некоторых вариантах выполнения модуль дополнительно содержит систему управления ориентацией по меньшей мере по одной оси, содержащую по меньшей мере один газовый двигатель. Такая система управления может, в частности, обеспечивать устойчивость траектории при вращении вокруг продольной оси. Этот двигатель может работать как на холодных, так и на горячих газах.
В некоторых вариантах выполнения газовый двигатель закреплен на нижнем фланце и ориентирован по касательной к упомянутому нижнему фланцу.
В некоторых вариантах выполнения газ, используемый газовым двигателем, является тем же рабочим телом, которое использует электрический двигатель, и поступает в этом случае из резервуара рабочего тела электрического двигателя.
В других вариантах выполнения, газ, используемый газовым двигателем, отличается от рабочего тела и поступает из специального резервуара. В частности, речь может идти о резервуаре с азотом.
В некоторых вариантах выполнения верхний фланец оснащен верхним механическим соединительным устройством, выполненным с возможностью соединения с космическим аппаратом, таким как спутник.
В некоторых вариантах выполнения нижний фланец оснащен нижним механическим соединительным устройством, выполненным с возможностью соединения с космической ракетой-носителем.
В некоторых вариантах выполнения диметры верхнего и нижнего механических соединительных устройств являются идентичными. Благодаря этим соединительным устройствам, двигательный модуль можно легко и без существенной дополнительной адаптации установить между спутником и ракетой-носителем во время подготовки к полету.
В некоторых вариантах выполнения электрический двигатель установлен на главном корпусе твердотопливного химического двигателя через рамную конструкцию, закрепленную вокруг твердотопливного химического двигателя. Такая конструкция обеспечивает большую свободу крепления электрического двигателя и возможных вспомогательных устройств вокруг твердотопливного двигателя, при этом рамную конструкцию можно закрепить на главном корпусе в небольшом числе точек в мало чувствительных зонах, чтобы не повредить этот двигатель. Кроме того, такая рамная конструкция, образующая соединительное устройство между электрическим двигателем и твердотопливным двигателем, обеспечивает более значительное разделение между механическими напряжениями, создаваемыми каждым двигателем.
В некоторых вариантах выполнения рамная конструкция имеет геометрическую форму усеченного конуса или цилиндра.
В некоторых вариантах выполнения электрический двигательный блок закреплен на внутренней стенке рамной конструкции и ориентирован в заднюю сторону модуля. Внутреннее расположение электрического двигательного блока относительно рамной конструкции позволяет избегать, с одной стороны, выброса частиц на рамную конструкцию и, с другой стороны, получить больше места на наружной поверхности для крепления возможных вспомогательных устройств.
В некоторых вариантах выполнения резервуар рабочего тела закреплен на наружной стенке рамной конструкции. Предпочтительно он закреплен по касательной к главному направлению рамы, которое совпадает с главным направлением модуля.
В некоторых вариантах выполнения газовый двигатель системы управления ориентацией по меньшей мере по одной оси закреплен на наружной стенке рамной конструкции и ориентирован по касательной к главному направлению модуля.
В некоторых вариантах выполнения рамная конструкция содержит верхний опорный участок, оснащенный на своем верхнем конце верхним механическим соединительным устройством, выполненным с возможностью соединения с космическим аппаратом, таким как спутник.
В некоторых вариантах выполнения рамная конструкция содержит переходный нижний участок в виде усеченного конуса, расширяющегося от верхнего участка, оснащенный на своем нижнем конце механическим соединительным устройством, выполненным с возможностью соединения с космической ракетой-носителем. Благодаря этим соединительным устройствам, двигательный модуль может легко заменять переходник адаптации диаметра, обычно необходимый между соединительными устройствами ракеты-носителя и космического аппарата, такого как спутник.
В некоторых вариантах выполнения двигательный модуль дополнительно содержит средства производства электрической энергии, связи и навигации, позволяющие ему работать в автономном режиме.
Вышеупомянутые, а также другие отличительные признаки и преимущества будут более очевидны из нижеследующего подробного описания примеров выполнения предложенного модуля со ссылками на прилагаемые чертежи.
Краткое описание чертежей
Прилагаемые чертежи являются схематичными и прежде всего призваны иллюстрировать основные принципы изобретения.
На этих чертежах идентичные элементы (или части элемента) от фигуры к фигуре имеют одинаковые обозначения. Кроме того, элементы (или части элемента), принадлежащие к разным примерам выполнения, но имеющие аналогичную функцию, обозначены на фигурах цифровыми позициями, увеличенными на 100, 200 и т.д.
Фиг. 1 - вид сбоку первого примера двигательного модуля.
Фиг. 2А - вид в перспективе второго примера двигательного модуля.
Фиг. 2В - вид в проекции, обратной фиг. 2А.
Осуществление изобретения
Для большей конкретизации изобретения ниже со ссылками на прилагаемые чертежи представлено более подробное описание примеров модулей. При этом следует отметить, что изобретение не ограничивается этими примерами.
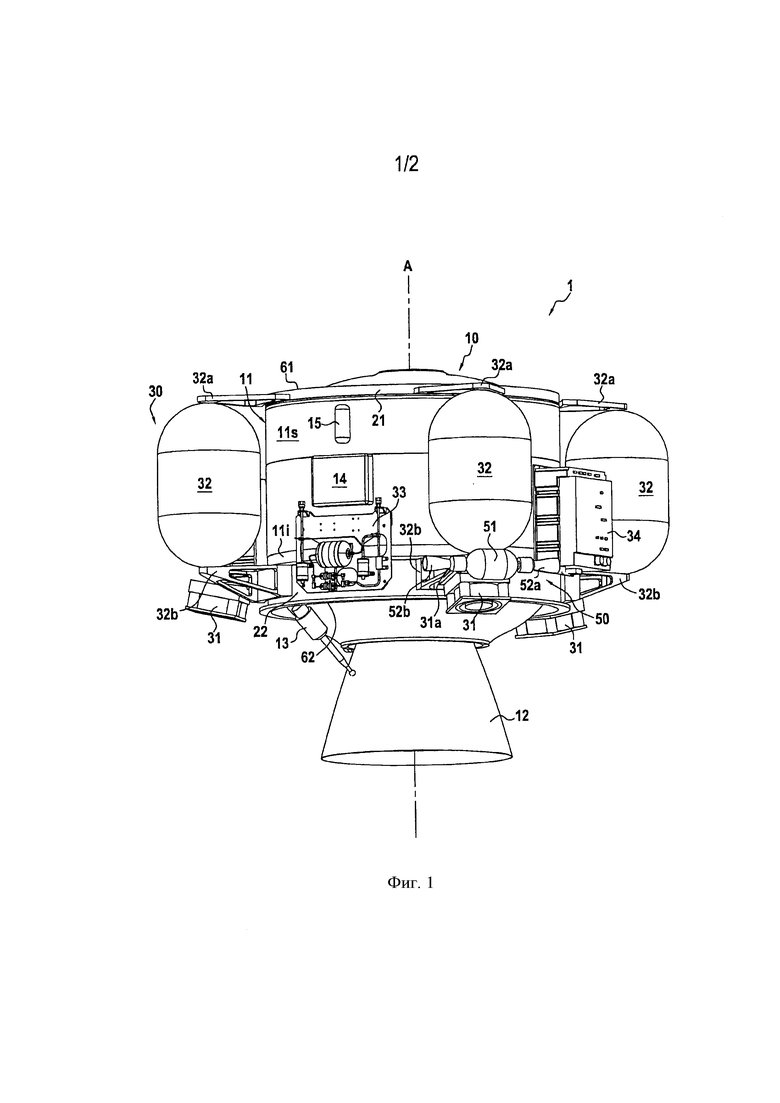
На фиг. 1 представлен первый пример выполнения двигательного модуля 1. Он содержит твердотопливный химический двигатель 10, вокруг которого установлено некоторое количество компонентов электрического двигателя 30 или вспомогательных устройств.
Твердотопливный химический двигатель 10, называемый также просто твердотопливным двигателем, в основном имеет симметрию вращения вокруг свой главной оси А и содержит главный корпус 11, в котором находится заряд твердого топлива, и сопло 12, расположенное в осевом направлении сзади главного корпуса 11.
Это сопло 12 является ориентируемым при помощи двух электромеханических домкратов 13 (из которых на фиг. 1 показан только один), расположенных на 90° друг от друга вокруг сопла 12: эти домкраты позволяют управлять соплом для воздействия на составляющие вращения вокруг вертикальной оси и продольного крена траектории модуля и, следовательно, оборудованного им космического аппарата. В другом примере для обеспечения управления аппаратом при вращении вокруг продольной оси можно использовать также конфигурацию с двойным соплом, каждое из которых ориентируют при помощи двух электромеханических домкратов, расположенных на 90°.
Этими домкратами 13 управляет блок 14 управления домкратами, закрепленный на боковой поверхности главного корпуса 11. Кроме того, на боковой поверхности главного корпуса 11 закреплена также батарея 15 для питания систем двигательного модуля 1, когда он не получает питание от внешнего источника питания, в частности, когда солнечные панели космического аппарата еще не развернуты.
Предпочтительно главный корпус 11 выполнен из композитного материала. Для ограничения числа креплений, выполняемых в главном корпусе 11 из композитного материала, и чтобы максимально избегать таким образом его повреждения, главный корпус 11 оснащен двумя крепежными соединительными устройствами 21 и 22.
Первым устройством является верхний крепежный фланец 21, установленный на уровне верхнего конца главного корпуса 11. Этот верхний крепежный фланец 21 кольцевой формы является присоединяемой деталью, предпочтительно из алюминиевого сплава, которую устанавливают при помощи шпилек или винтов, например, на композитной юбке 11s, продолжающей вверх участок наибольшего диаметра главного корпуса 11.
Второе крепежное соединительное устройство является нижним крепежным фланцем 22, установленным на уровне нижнего конца главного корпуса 11. Этот нижний крепежный фланец 22 кольцевой формы является присоединяемой деталью, предпочтительно из алюминиевого сплава, которую устанавливают при помощи шпилек или винтов, например, на композитной юбке 11i, продолжающей вниз участок наибольшего диаметра главного корпуса 11.
Эти два крепежных фланца 21 и 22 обеспечивают крепление электрического двигателя 30 на твердотопливном двигателе 10. Этот электрический двигатель 30 содержит множество электрических двигательных блоков 31, множество баков 32 с рабочим телом, питающих двигательные блоки 31, и устройство 33 регулирования давления, обычно называемое PPU (от "Power Processing Unit"), для каждого двигательного блока 31.
Каждый электрический двигательный блок 31 представляет собой стационарный плазменный двигатель: он потребляет рабочее тело, которое он ионизирует и ускоряет в виде плазмы, благодаря действию сильных электрических полей, генерируемых устройством PPU 34 рассматриваемого блока 31. Выбрасываемая таким образом блоком 31 плазма создает за счет реакции тягу, ускоряющую модуль 1. Каждый блок 31 установлен на нижнем крепежном фланце 22 через крепление 31а таким образом, что направлен в заднюю сторону модуля 1. Предпочтительно используют три блока, каждый из которых находится на 120° вокруг оси А. Направление тяги каждого двигательного блока 31 может образовать небольшой угол с направлением оси А: в этом случае направления тяги всех двигательных блоков 31 сходятся в точке оси А, предпочтительно находящейся в центре тяжести, образованном двигательным модулем и космическим аппаратом, которому сообщается движение.
Резервуары 32 рабочего тела содержат рабочее тело, необходимое для работы двигательных блоков 31: предпочтительно речь идет о ксеноне. Их число не обязательно равно числу двигательных блоков 31: в этом примере выполнения модуль 1 содержит четыре резервуара 32 рабочего тела (четвертый скрыт твердотопливным двигателем 10). Каждый резервуар 32 рабочего тела закреплен на уровне первого конца на верхнем крепежном фланце 21 при помощи первого крепления 32а и на уровне второго конца на нижнем крепежном фланце 22 при помощи второго крепления 32b. Таким образом, они расположены по существу параллельно оси А и на 90° каждый вокруг оси А.
Устройство 33 регулирования давления позволяет уменьшать давление рабочего тела до его подачи в двигательные блоки 31. В данном случае оно предусмотрено в одном экземпляре на нижнем крепежном фланце 22. Дополнительно оно может быть частично закреплено на одном или двух лонжеронах, установленных своими концами на двух крепежных фланцах 21 и 22.
Каждый электронный блок 34 питания и регулирования позволяет питать двигательный блок 31 электрическими токами, способными генерировать достаточно сильные электрические поля для обеспечения работы двигательного блока 31. Аналогично устройству 33 регулирования давления каждый электронный блок 34 питания и регулирования может быть частично закреплен на нижнем крепежном фланце 22 и на лонжеронах, соединяющих два крепежных фланца 21 и 22, предпочтительно вблизи питаемого им двигательного блока 31.
Модуль 1 дополнительно содержит газовый двигатель 50, содержащий газовый резервуар 51, первое сопло 52а и второе сопло 52b, направленное в том же направлении и противоположно первому соплу 52а. Этот газовый двигатель 50 закреплен на нижнем крепежном фланце 22 таким образом, чтобы оба сопла 52а, 52b были расположены по касательной относительно оси А: таким образом, этот двигатель может действовать на составляющую вращения вокруг продольной оси траектории модуля 1.
В этом примере выполнения газовый двигатель закреплен на нижнем крепежном фланце 22 при помощи крепления 31а одного из электрических двигательных блоков 31; вместе с тем, он может быть оснащен отдельным креплением.
В этом примере выполнения газовый двигатель 50 использует газ, поступающий из его собственного резервуара 51, в частности, азот, или газы, получаемые при сгорании заряда твердого топлива; вместе с тем, в других примерах выполнения, газовый двигатель 50 может питаться газом из резервуаров 32 рабочего тела. В этом случае, кроме своей описанной выше основной функции, устройство 33 регулирования давления может также уменьшать давление рабочего тела до давления, используемого газовым двигателем 50.
Кроме своих уже описанных функций, верхний 21 и нижний 22 крепежные фланцы могут также иметь верхнее 61 и нижнее 62 механические соединительные устройства, соответствующие нормам и стандартам в аэрокосмической области, для крепления модуля 1 на космическом аппарате при помощи его верхнего механического соединительного устройства 61, с одной стороны, и на ракете-носителе при помощи его нижнего механического соединительного устройства 62, с другой стороны.
В частности, в этом примере выполнения диаметры верхнего и нижнего механических соединительных устройств 61, 62 являются идентичными, поэтому модуль 1 можно устанавливать между космическим аппаратом и ракетой-носителем без специального дополнительного переходника.
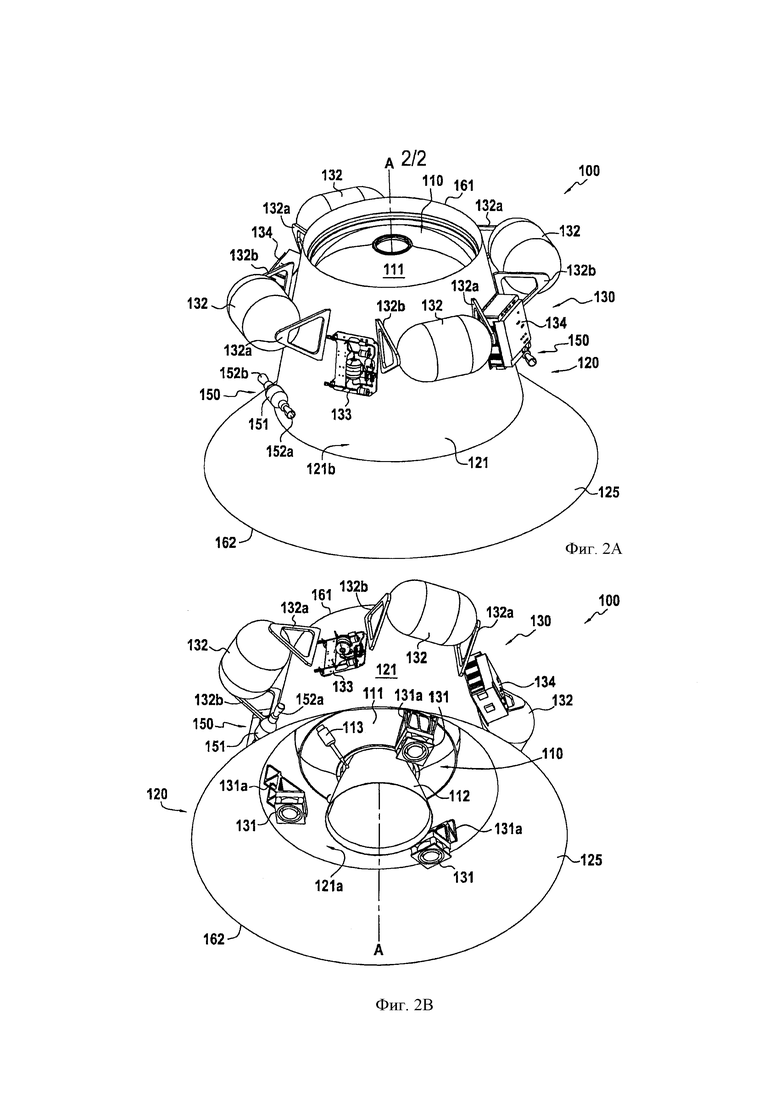
На фиг. 2А и 2В представлен второй пример выполнения двигательного модуля 100. Он содержит твердотопливный химический двигатель 110, вокруг которого установлена рамная конструкция 120, на которой закреплено некоторое количество компонентов электрического двигателя 130 и его вспомогательных функциональных устройств.
Твердотопливный химический двигатель 110, называемый также просто твердотопливным двигателем, в основном идентичен двигателю 10 из первого примера выполнения, и его подробное описание опускается.
Чтобы ограничить число креплений на главном корпусе 111, который предпочтительно выполнен из композитного материала, и чтобы избегать его повреждения, главный корпус 11 оборудуют рамной конструкцией 120.
Эту рамную конструкцию 120, предпочтительно выполненную из алюминия и композита в виде полимера, усиленного карбоновыми волокнами (CFRP), можно установить вокруг главного корпуса 111 при помощи любого известного средства крепления, например, при помощи шпилек или винтов.
Эта рамная конструкция 120, содержащая верхний опорный участок 121 в виде усеченного конуса, расширяющегося в заднюю сторону модуля 100, позволяет закрепить электрический двигатель 130 на твердотопливном двигателе 110. Этот электрический двигатель 130 в основном содержит те же компоненты, что и электрический двигатель 30 из первого примера выполнения: множество электрических двигательных блоков 131, множество резервуаров 132 рабочего тела, питающих двигательные блоки 131, устройство 133 регулирования давления, а также электронный блок 134 питания и регулирования (PPU) для каждого двигательного блока 131.
Каждый блок 131 установлен на внутренней стороне 121а опорного участка 121 рамной конструкции 120 при помощи крепления 131а таким образом, что он оказывается направленным в заднюю сторону модуля 1. Предпочтительно этот пример тоже содержит три блока, распределенные на 120° вокруг оси А.
Каждый резервуар 132 рабочего тела закреплен на наружной стороне 121b опорного участка 121 при помощи первого крепления 132а и второго крепления 132b, предусмотренных соответственно на уровне первого конца и второго конца резервуара 132. В этом примере выполнения резервуары 132 расположены в плоскости, по существу ортогональной к оси А, и на 90°, каждый, вокруг оси А.
В данном случае устройство 133 регулирования предусмотрено в одном экземпляре и закреплено на наружной стороне 121b опорного участка 121.
Каждый электронный блок 134 питания и регулирования тоже закреплен на наружной стороне 121b опорного участка 121, предпочтительно вблизи питаемого им двигательного блока 131.
Кроме того, модуль 100 содержит два газовых двигателя 150, в основном идентичные газовому двигателю 50 из первого примера выполнения, которые содержат газовый резервуар 151, первое сопло 152а и второе сопло 152b, расположенное в том же направлении и противоположно первому соплу 152а. Каждый газовый двигатель 150 закреплен на наружной стороне 121b опорного участка 121 таким образом, чтобы оба сопла 152а, 152b были расположены по касательной относительно оси А. Кроме того, каждый газовый двигатель 150 расположен на нижнем конце опорного участка 121, чтобы расстояние до оси А было большим и чтобы получить большое плечо рычага для воздействия на составляющую вращения вокруг продольной оси траектории модуля.
Кроме уже описанных функций, рамная конструкция 120 может также иметь верхнее 161 и нижнее 162 механические соединительные устройства, соответствующие нормам и стандартам в аэрокосмической области, для крепления модуля 100 на космическом аппарате при помощи ее верхнего механического соединительного устройства 161, с одной стороны, и на ракете-носителе при помощи ее нижнего механического соединительного устройства 162, с другой стороны. Так, верхний конец рамной конструкции 120 выполнен с возможностью образования верхнего механического соединительного устройства 161, тогда как в продолжении и сзади своего верхнего опорного участка 121 рамная конструкция 120 содержит нижний переходный участок 125 по существу в виде усеченного конуса (угол которого, тем не менее, может отличаться от угла усеченного конуса опорного участка 121), нижний конец которого выполнен с возможностью образования нижнего механического соединительного устройства 162.
Благодаря этому переходному участку 125 можно регулировать диаметр нижнего механического соединительного устройства 162 таким образом, чтобы он соответствовал стандартному диаметру соединения с ракетой-носителем: при этом, поскольку диаметр верхнего механического соединительного устройства 161 адаптирован для соединения с комическим аппаратом, модуль 100 может заменять переходник адаптации диаметра, обычно необходимый между соединительными устройствами ракеты-носителя и космического аппарата, такого как спутник.
Описанные в настоящей заявке варианты или примеры выполнения носят исключительно иллюстративный и не ограничительный характер, поэтому на основании этой заявки специалист может легко изменять эти варианты или примеры выполнения или предусматривать их другие версии, оставаясь при этом в рамках объема изобретения.
Кроме того, различные отличительные признаки этих вариантов или примеров выполнения можно применять отдельно или в комбинации. При использовании в комбинации эти отличительные признаки можно применять, как было описано выше, или иначе, поскольку изобретение не ограничивается конкретными комбинациями, описанными в настоящей заявке. В частности, если только не указано иное, отличительный признак, описанный в связи с одним вариантом или примером выполнения, можно аналогично применять для другого варианта или примера выполнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ИЛИ ВОЗВРАТА ИСКУССТВЕННЫХ СПУТНИКОВ | 2012 |
|
RU2600971C2 |
| СПОСОБ ПЕРЕОБОРУДОВАНИЯ БОЕВЫХ ТВЕРДОТОПЛИВНЫХ РАКЕТ В ТВЕРДОТОПЛИВНУЮ РАКЕТУ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ И РАКЕТА КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 1998 |
|
RU2142898C1 |
| СИСТЕМА ПУСКА РАКЕТ И ВСПОМОГАТЕЛЬНАЯ АППАРАТУРА | 2011 |
|
RU2551047C2 |
| РАКЕТА-НОСИТЕЛЬ МНОГОКРАТНОГО ИСПОЛЬЗОВАНИЯ И МНОГОКОМПОНОВОЧНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 1991 |
|
RU2035358C1 |
| КОСМИЧЕСКИЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ОБЕСПЕЧЕНИЯ УСЛУГ ПО ЗАПУСКУ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ КОСМИЧЕСКОГО РАКЕТНОГО КОМПЛЕКСА | 2001 |
|
RU2179941C1 |
| СТАБИЛИЗАЦИЯ ДВИЖЕНИЯ НЕУСТОЙЧИВЫХ ФРАГМЕНТОВ КОСМИЧЕСКОГО МУСОРА | 2010 |
|
RU2505461C1 |
| ТОПЛИВНЫЙ БАК ДВИГАТЕЛЬНОЙ УСТАНОВКИ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2666110C1 |
| СИСТЕМА ХРАНЕНИЯ КРИОГЕННОЙ ЖИДКОСТИ ДЛЯ КОСМИЧЕСКОГО АППАРАТА | 2009 |
|
RU2529084C2 |
| РАКЕТА КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 1992 |
|
RU2025645C1 |
| РАКЕТНО-КОСМИЧЕСКАЯ СИСТЕМА | 1993 |
|
RU2087389C1 |
Группа изобретений относится к космическим двигательным модулям, предназначенным, в частности, для космических аппаратов, таких как спутники, зонды, или для верхних ракетных ступеней. Космический двигательный модуль содержит твердотопливный химический двигатель (10), имеющий главный корпус (11), и по меньшей мере один электрический двигатель (30), при этом упомянутый по меньшей мере один электрический двигатель (30) установлен на упомянутом главном корпусе (11) твердотопливного химического двигателя (10) при помощи крепежной конструкции, содержащей верхний фланец (21) на уровне верхнего конца главного корпуса (11) твердотопливного химического двигателя (10) и нижний фланец (22) на уровне нижнего конца главного корпуса (11) твердотопливного химического двигателя (10). Электрический двигатель (130) может быть установлен на главном корпусе (111) твердотопливного химического двигателя (110) через рамную конструкцию (120) в виде усеченного конуса или цилиндра, закрепленную вокруг твердотопливного химического двигателя (110). Техническим результатом группы изобретений является повышение массы выводимого на околоземную орбиту полезного груза. 2 н. и 8 з.п. ф-лы, 3 ил.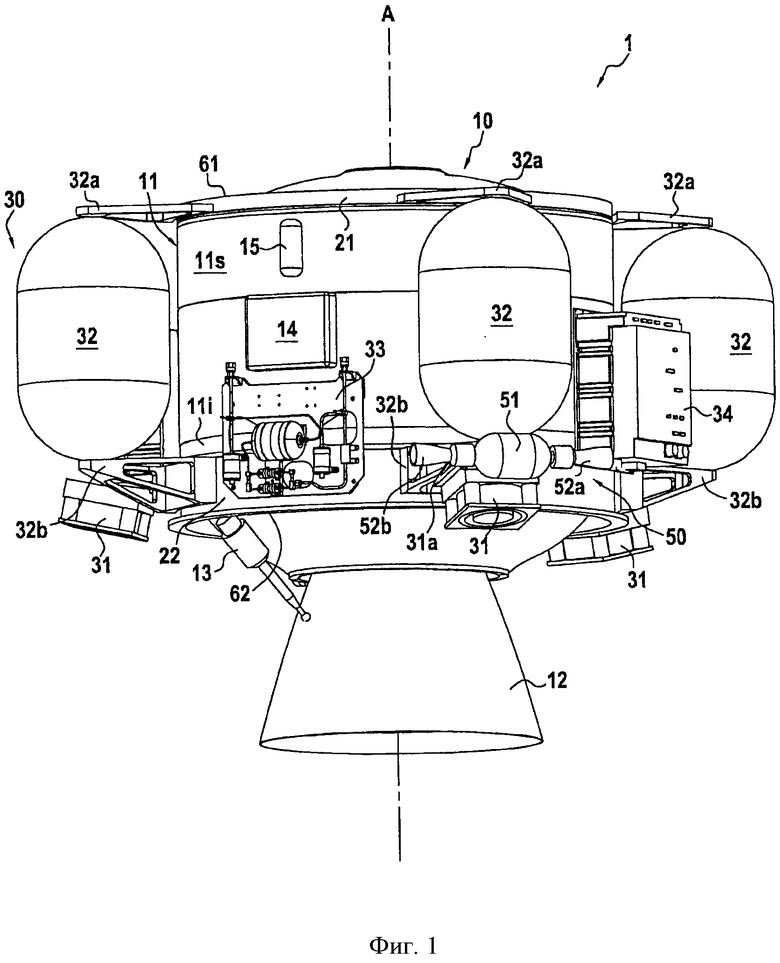
1. Космический двигательный модуль, отличающийся тем, что содержит твердотопливный химический двигатель (10), имеющий главный корпус (11), и по меньшей мере один электрический двигатель (30),
тем, что упомянутый по меньшей мере один электрический двигатель (30) установлен на упомянутом главном корпусе (11) твердотопливного химического двигателя (10), и
тем, что электрический двигатель (30) установлен на главном корпусе (11) твердотопливного химического двигателя (10) при помощи крепежной конструкции, содержащей верхний фланец (21), предусмотренный на уровне верхнего конца главного корпуса (11) твердотопливного химического двигателя (10), и нижний фланец (22), предусмотренный на уровне нижнего конца главного корпуса (11) твердотопливного химического двигателя (10).
2. Модуль по п. 1, отличающийся тем, что главный корпус (11) твердотопливного химического двигателя (10) выполнен из композитного материала.
3. Модуль по п. 1, отличающийся тем, что верхний фланец (21) является кольцевым фланцем, установленным на верхней юбке (11s) главного корпуса (11) твердотопливного химического двигателя (10), и тем, что нижний фланец (22) является цилиндрическим фланцем, установленным на нижней юбке (11i) главного корпуса (11).
4. Модуль по п. 1, отличающийся тем, что электрический двигатель (30) содержит электрический двигательный блок (31) и резервуар (32) рабочего тела,
тем, что электрический двигательный блок (31) установлен на нижнем фланце (22) и предпочтительно ориентирован в заднем направлении модуля (1), и
тем, что резервуар (32) рабочего тела закреплен между нижним (22) и верхним (21) фланцами.
5. Модуль по п. 1, отличающийся тем, что дополнительно содержит систему управления ориентацией по меньшей мере по одной оси, содержащую по меньшей мере один газовый двигатель (50), и
тем, что упомянутый газовый двигатель (50) закреплен на нижнем фланце (22) и ориентирован по касательной к упомянутому нижнему фланцу (22).
6. Модуль по п. 1, отличающийся тем, что верхний фланец (21) оснащен верхним механическим соединительным устройством (61), выполненным с возможностью соединения с космическим аппаратом, таким как спутник, и
тем, что нижний фланец (22) оснащен нижним механическим соединительным устройством (62), выполненным с возможностью соединения с космической ракетой-носителем.
7. Космический двигательный модуль, отличающийся тем, что содержит твердотопливный химический двигатель (110), имеющий главный корпус (111), и по меньшей мере один электрический двигатель (130),
тем, что упомянутый по меньшей мере один электрический двигатель (130) установлен на упомянутом главном корпусе (111) твердотопливного химического двигателя (110), и
тем, что электрический двигатель (130) установлен на главном корпусе (111) твердотопливного химического двигателя (110) через рамную конструкцию (120) в виде усеченного конуса или цилиндра, закрепленную вокруг твердотопливного химического двигателя (110).
8. Модуль по п. 7, отличающийся тем, что электрический двигатель (130) содержит электрический двигательный блок (131) и резервуар (132) рабочего тела,
тем, что электрический двигательный блок (131) закреплен на внутренней стенке (121а) рамной конструкции (120) и предпочтительно ориентирован в заднюю сторону модуля, и
тем, что резервуар (132) рабочего тела закреплен на наружной стенке (121b) рамной конструкции (120).
9. Модуль по п. 7, отличающийся тем, что дополнительно содержит систему управления ориентацией по меньшей мере по одной оси, содержащую по меньшей мере один газовый двигатель (150), и
тем, что упомянутый газовый двигатель (150) закреплен на наружной стенке (121b) рамной конструкции (120) и ориентирован по касательной относительно главного направления (А) модуля (100).
10. Модуль по п. 7, отличающийся тем, что рамная конструкция (120) содержит верхний опорный участок (121), оснащенный на своем верхнем конце верхним механическим соединительным устройством (161), выполненным с возможностью соединения с космическим аппаратом, таким как спутник, и
переходный нижний участок (125) в виде усеченного конуса, расширяющегося от верхнего участка (121), оснащенный на своем нижнем конце нижним механическим соединительным устройством (162), выполненным с возможностью соединения с космической ракетой-носителем.
| US 8584443 B1, 19.11.2013 | |||
| Крепежный элемент для соединения деревянных деталей | 1980 |
|
SU937644A1 |
| Под ред | |||
| В.П | |||
| Глушко | |||
| Космонавтика: Энциклопедия | |||
| -М.: Советская энциклопедия, 1985 | |||
| ПЛУГ С ВРАЩАЮЩИМИСЯ РАБОЧИМИ ПОВЕРХНОСТЯМИ | 1925 |
|
SU432A1 |
| Система смазки двигателя внутреннего сгорания | 1982 |
|
SU1059231A1 |
| ДВИГАТЕЛЬНАЯ УСТАНОВКА ДЛЯ ОТДЕЛЕНИЯ И УВОДА АЭРОКОСМИЧЕСКОГО АГРЕГАТА ОТ РАЗГОННОЙ СТУПЕНИ НОСИТЕЛЯ | 2003 |
|
RU2252332C2 |
| КОСМИЧЕСКИЙ АППАРАТ И ЕГО БЛОК РЕАКТИВНЫХ ДВИГАТЕЛЕЙ | 2004 |
|
RU2271317C1 |

