Настоящее изобретение относится к устройству для возврата искусственных спутников из космоса или для перемещения искусственных спутников на другую космическую орбиту. В частности, настоящее изобретение относится к устройству для управляемого и безопасного возврата спутников, а именно для снятия с орбиты искусственных спутников или космических аппаратов, при этом термин "снятие с орбиты" означает управляемый и быстрый возврат этих искусственных спутников или космических аппаратов с низких орбит в атмосферу Земли в заранее определенные участки на Земле. Согласно другому аспекту настоящее изобретение относится к устройству, выполненному с возможностью изменять орбиту искусственных спутников или космических аппаратов, то есть, осуществлять управляемое и быстрое перемещение этих искусственных спутников или комических аппаратов с их орбиты на парковочную орбиту.
Более конкретно, настоящее изобретение относится к устройству для перемещения искусственных спутников или космических аппаратов и/или для возврата их с рабочей орбиты в конце срока их службы или при возникновении неисправности.
Согласно другому аспекту настоящее изобретение относится к устройству, выполненному с возможностью служить резервной двигательной системой для изменения орбитального положения искусственных спутников или космических аппаратов.
Согласно другому аспекту настоящее изобретение относится к способу возврата космического спутника с космической орбиты или перевода спутника на другую космическую орбиту. Более конкретно, настоящее изобретение относится к способу возврата с орбиты или изменения орбиты космического спутника или космического аппарата путем независимого перемещающего/возвращающего устройства, имеющегося на упомянутом космическом спутнике или космическом аппарате.
Термины "искусственный спутник", "космический спутник" или "космический аппарат" для целей настоящего изобретения относятся к искусственным спутниками или аппаратам, способным оставаться на орбите или перемещаться в пространстве с низких орбит в атмосфере Земли.
Термин "рабочая орбита" для целей настоящего изобретения относится к орбите, заданной спутнику или космическому аппарату для работы во время его пребывания в космосе.
Термин "низкая орбита" для целей настоящего изобретения относится к низкой околоземной орбите (LEO), т.е., круговой орбите с высотой между атмосферой и поясом Ван Аллена, от 200 до 2000 км от поверхности Земли.
Термин "высокая орбита" для целей настоящего изобретения относится к средней околоземной орбите (MEO) или к геосинхронной орбите (GSO) или к геостационарной орбите Земли (GEO). Средняя околоземная орбита - это орбита между низкой околоземной орбитой и геостационарной орбитой, и ее высота равна приблизительно 10000 км от поверхности Земли. Геосинхронная орбита - это околоземная орбита с орбитальным периодом, совпадающим с периодом сидерического вращения Земли. Геостационарная орбита - это конкретный тип геосинхронной орбиты которая является экваториальной круговой орбитой на расстоянии приблизительно 36000 км над экватором.
Термин "парковочная орбита" для целей настоящего изобретения относится к орбите, на которой искусственный спутник или космический аппарат может оставаться, не вызывая повреждений или не занимая пространство, которое может использоваться другими искусственными спутниками или космическими аппаратами.
Первый искусственный спутник был запущен в 1957 году. С тех пор на орбиты было выведено более 6000 спутников, лишь 800 из которых в настоящее время работают. Большинство спутников которые прекратили свою работу, продолжают вращаться по околоземным орбитам и управлять траекторией их движения невозможно.
При растущем количестве запускаемых спутников происходит обусловленное этими запусками сокращение пространства, доступного размещения новых спутников на орбите. Кроме того, существует высокая вероятность столкновения неработающих или неуправляемых спутников и их взрыва. Это создает множество проблем, поскольку приблизительно 50% от отслеживаемых объектов на орбите образуются в результате взрывов или столкновений в космосе. Вследствие этого вокруг Земли в настоящее время со скоростью более 30000 км/ч движется приблизительно полмиллиона единиц космического мусора, загрязняя пространство орбит, наиболее удобных с научной, технической и коммерческой точек зрения. Каждый новый спутник, запускаемый на орбиту, увеличивает не только количество объектов в космосе, но количество неуправляемых обломков, возникающих в результате продолжающихся столкновений и взрывов заброшенных обломков.
Для класса низких орбит быстро растущее количество обломков представляет угрозу и является источником загрязнения, которым невозможно пренебречь. Эта орбитальная область относительно невелика и почти насыщена, что создает существенный риск столкновений между обломками и пространственными объектами, которые продолжают находиться в эксплуатации. Существует риск серьезных повреждений искусственных спутников или даже их полного уничтожения с последующим провалом соответствующих космических миссий. Неконтролируемое увеличение такого космического мусора может привести к тому, что известно как "синдром Кесслера", т.е., когда достигается некоторая плотность мусора на орбите возникнет цепочка столкновений, которая на несколько поколений воспрепятствует любой дальнейшей космической деятельности или использованию спутников. Кроме того, космические объекты, оставленные на низких орбитах, возвращаются в атмосферу Земли и падают на поверхность планеты спустя месяцы или годы после того, как любые орбитальные системы управления, имеющиеся на борту спутника, израсходуют топливо, или после того, как спутник станет неуправляемым из-за неисправности, что означает, что их вход в атмосферу является неуправляемым и представляет риск для любых объектов и людей.
Фактически, если такой мусор во время движения сквозь атмосферу не сгорает полностью, что иногда случается, в зависимости от материалов, применяемых в конструкции космического аппарата и от динамики входа в атмосферу, он может упасть на Землю с высокой скоростью, и становиться угрозой для людей, зданий и инфраструктуры (т.е., газохранилищ, линий электропередач, ядерных реакторов и пр.). Даже не учитывая прямое попадание в объекты и людей, неуправляемый вход в атмосферу мусора может представлять высокий риск. Фактически некоторые спутники могут иметь на борту радиоактивный или высокотоксичный материал (например, топливо, содержащее гидразин), который может рассеиваться в атмосфере над плотно заселенными областями. В настоящее время количество объектов, падающих на землю из космоса уже в среднем составляет одну единицу в сутки, и никто не может предсказать когда или где произойдет падение. По существу скорость столкновения составляет от приблизительно 30 км/ч для легких объектов до более 300 км/ч для более тяжелых предметов.
Космические объекты, выведенные на средние или высокие орбиты, не тормозятся верхними слоями земной атмосферы (экзосферой), поэтому они не падают на поверхность Земли. Следовательно искусственные спутники занимают коммерчески выгодные орбитальные сегменты в течение очень длительного времени. В конце срока их службы, который типично составляет 15 лет, они становятся мусором и их бросают без управления, что препятствует размещению любых других космических объектов рядом с ними. Учитывая важность этих орбит и ограниченность имеющегося пространства спутники необходимо перемещать на орбиту "кладбище" или парковочную орбиту до того как подойдет к концу срок их службы. Это типично является высокой орбитой, не имеющей значения для выполнения космических миссий. Такое перемещение спутника выполняют с применением той же двигательной системы, которая используется для орбитальных маневров, если таковая имеется на борту. Для этой цели можно зарезервировать часть топлива, имеющегося в баках, следовательно, ограничивая срок службы спутника и жертвуя частью топлива, имеющегося на борту, чтобы иметь возможность завершить парковочные маневры. Изменение орбиты искусственных телекоммуникационных спутников влечет прерывание их коммерческой работы приблизительно на 6 месяцев. Для спутника с начальной массой приблизительно 1000 кг и рассчитанного на 7 лет работы это означает экономические потери приблизительно 10 миллионов долларов США. Если возникнет какая-либо проблема, например, неисправность применяемых реактивных двигателей малой тяги, нехватка горючего, отсутствие подходящей двигательной системы или механическая неисправность, спутник останется в своем положении практически навсегда, что не позволит его заменить на новый, технологически более совершенный спутник. Некоторые модели показали, что каждый искусственный спутник на геостационарной орбите каждый год проходит приблизительно в 50 м от другого космического объекта с высоким риском столкновения.
"Конвенция о международной ответственности за ущерб, причиненный космическими объектами" устанавливает, что кто бы не осуществил запуск объекта в космос, он несет ответственность за любой ущерб, причиненный объектом, как в космосе, так и на Земле. Межагентский координационный комитет по космическому мусору (МККМ) установил что в конце рабочей миссии обычный космический аппарат должен совершить маневр, чтобы не допустить помех другим орбитальным космическим системам, а в случае низкоорбитальных искусственных спутников их возврат в атмосферу должен быть гарантирован в течение 25 лет с окончания срока их службы.
По существу расходы на выполнение искусственным спутником на геостационарной орбите требований МККМ составляют приблизительно 10-15% от общей стоимости спутника. Таким образом, космический мусор является растущей угрозой для научных и коммерческих работ на орбите. Следовательно, было бы полезно создать устройство, способное надежно, управляемо и безопасно снимать с орбиты или перемещать (на другую орбиту) находящиеся на орбите искусственные спутники и космические аппараты, срок службы которых исчерпан.
Существуют другие известные устройства для возврата с орбиты космических объектов или перевода их на парковочную орбиту. Они по существу содержат пассивные устройства, т.е., в них нет системы управления выбором времени, траекторией и конечной точкой назначения перемещаемого объекта.
В US 6,655,673 описано устройство для запуска в космос, которое выполнено с возможностью захвата объектов, уже находящихся на орбите и возврата их с орбиты в направлении Земли с помощью надувного модуля входа в атмосферу. Типично такое устройство является сферическим объектом, имеющим существенные размеры, чтобы гарантировать его притяжение Землей в результате его взаимодействия с остаточными слоями атмосферы. Однако это устройство имеет недостаток, заключающийся в том, что ему приходится нести объект, подлежащий возврату в атмосферу, без гарантии управления на фазе входа в атмосферу или любого последующего существенного сокращения времени возврата. Поэтому, он даже не может гарантировать, что орбита, занятая им на фазе "падения", не приведет к появлению риска столкновения с другими спутниками. Кроме того, это устройство не способно смещать объекты, находящиеся на высоких орбитах, на парковочную орбиту. Еще одним недостатком является то, что операции по возврату требуют выполнения точных орбитальных маневров и для каждого возвращаемого объекта требуется специальный запуск, что делает процесс возврата дорогим и рискованным.
В US 5,120,008 описано устройство, которое использует солнечное излучение, проходящее сквозь объектив, для растворения космического мусора. Это устройство имеет недостаток, заключающийся в том, что оно полезно только для небольших частиц мусора, которые в любом случае спонтанно войдут в атмосферу через относительно небольшое время. Кроме того, такое устройство должно быть оборудовано двигателями малой тяги, которые должны иметь возможность многократного включения, чтобы приближаться к различным кускам мусора на орбите. Другой недостаток заключается в том, что такое устройство нужно подготовит к специальному запуску, чтобы оно вышло на орбиту (орбиты), на которой идентифицирован мусор, подлежащий уничтожению, что вновь делает процесс очистки дорогим и рискованным.
В US 4,991,799 описано устройство, состоящее из космического корабля, вращающегося вокруг своей оси, с множеством панелей, имеющих достаточную площадь поверхности, в которую должен ударяться космический мусор, при этом панели остаются прикрепленными, когда подметающее устройство движется. Как и упомянутые ранее это устройство имеет недостаток, поскольку требует многократно включающийся двигатель малой тяги для похода к различным кускам мусора на орбите. Другой недостаток заключается в том, что такое устройство полезно лишь для небольших предметов, которые в любом случае возвратятся в атмосферу спонтанно через относительно короткое время. Другой недостаток заключается в том, что для такого устройства потребуется специальный запуск на орбиту (орбиты), с которой нужно убрать найденный мусор, что вновь делает процесс очистки дорогим и опасным.
В US 5,082,211 описано "привязное" устройство для возврата орбитального мусора. Это устройство состоит из длинного намотанного троса, который можно разматывать в начале фазы возврата с орбиты. Этот способ может применяться только к низкоорбитальному мусору и в нем применяется остаточная атмосфера на этих высотах для постепенного торможения мусора и чтобы заставить его войти в атмосферу. Основной недостаток такого решения, однако, заключается в том, что невозможно гарантировать какой-либо управление траекторией или местом падения на Земле. Кроме того, операции разматывания и стабилизации троса чрезвычайно сложны и дороги.
В US 7,093,800 описан способ манипуляций со спутником в конце срока его службы с использованием части топлива, имеющегося на борту для возврата с орбиты. Основным недостатком этого способа является необходимость того, чтобы спутник, когда подходит время возврата с орбиты, находился в исправном рабочем состоянии. Кроме того, предполагается возвращать с орбиты только спутники, оснащенные двигателями малой тяги, имеющими возможность многократного включения, в которых сгорает жидкое топливо. Другой недостаток проистекает из необходимости иметь некоторую массу топлива и дополнительный объем в топливных баках для использования во время маневра возврата с орбиты, что приводит к сокращению срока службы спутника. Надежность такой системы неизбежно зависит от надежности двигателей на жидком топливе и системы управления.
В US 6,629,673 описан гибридный твердотопливный двигатель малой тяги, применяемый для перемещения пилотируемого транспортного корабля. Это устройство допускает многократное включение и управляется космическим кораблем, к которому оно подсоединено. Такой двигатель малой тяги позволяет выполнять аварийные смещения, но управления этим двигателем малой тяги требует нужной функциональности перемещаемого космического аппарата и его системы управления.
В CN 2011165916U описан способ использования кластера из четырех твердотопливных двигателей для смены орбит. Основным недостатком этого устройства является его неавтономность, поскольку двигатели должны управляться космическим аппаратом, с которым они соединены, поэтому их надежность зависит от последнего.
В US 6,024,328 описан способ управления спутником с помощью двигателя малой тяги, работающего на двухкомпонентном жидком топливе. Эта система требует наличия бака для топлива, идеально уплотненного бака для сжатого газа, которым топливо и окислитель вытесняются в камеру сгорания, а также клапанов и других компонентов. Количество компонентов в системе обусловливает снижение ее общей надежности и приводит к увеличению запускаемой массы и, следовательно расходов на запуск. Другим недостатком является пространство, занимаемое в космическом аппарате, который нужно спустить с орбиты.
Другие известные устройства и способы описаны в источниках, не являющихся патентными и относящихся к возврату с орбиты космических объектов.
В Janosky R. et el., "End-of-Life De-Orbiting Strategies for Satellites", DGLR Jahrbuch 2002, 1-10, Deutscher Luft und Raumfahrtkongress, Stuttgart, 23-26 Dept. 2002, описан способ возврата спутников с орбиты. Приводится обзор разных двигательных средств, подходящих для возврата спутников с орбиты. В частности, указывается, что наиболее подходящей двигательной системой для возврата с орбиты являются твердотопливные двигатели. Однако в этом документе не описано, как работает система или какую конфигурацию она должна иметь. Кроме того, описан способ возврата спутников, который применим только к низкоорбитальным спутникам. Двигательные средства описываются как часть спутников или как двигатели самих спутников, и не упоминается устройство для возврата с орбиты, автономное по отношению к спутнику.
В Schonenborg R., "Solid Propellant De-orbiting for Constellation Satellites", Proceedings of the 4th International Spacecraft Propulsion Conference (ESA SP-55), 2-9 June 2004, Chia Laguna, (Cagliari) описано применение системы возврата с орбиты, содержащей твердотопливное двигательное средство. В статье описано применение и расположение твердотопливного двигательного средства на спутниках системы Iridium. Наиболее релевантный недостаток этой системы относится к соединению со спутником, которое не позволяет управлять процессом возврата с орбиты когда топливо сгорает.
Итак, хотя известные устройства основаны на решениях, включающих в себя двигательные системы, которые можно использовать для возврата с орбиты, они не способны обеспечить экономически эффективную и действительно надежную работу или не способны управлять операциями возврата с орбиты или изменения орбиты после того, как они начались. Фактически описанные устройства и способы не позволяют создать автономное устройство для возврата с орбиты или изменения орбиты и, в таком случае, не описывают взаимодействие между упомянутым устройством и возвращаемым с орбиты или переводимым на другую орбиту спутником. Более того, такие устройства требуют специальных запусков для идентификации возвращаемых с орбиты объектов, что приводит к повышению стоимости таких операций. Помимо того, они содержат большое количество компонентов со сложным взаимодействием между ними, а это значит, что общая надежность системы резко снижается.
Следовательно, имеется потребность в устройстве и способе для возврата объектов, вращающихся в космосе по орбитам, которые являются автономными относительно упомянутых объектов, но связанными с ними. Кроме того, имеется потребность в устройстве и способе, которые могут гарантировать экономическую эффективность операций по такому возврату.
Было бы желательно, чтобы упомянутые устройство и способ могли сохранять высокую степень надежности на протяжении всей миссии объекта, подлежащего возврату.
Также было бы желательно, чтобы упомянутые устройство и способ были выполнены с возможностью работать автономно, без необходимости взаимодействия со космическим объектом, подлежащим возврату.
Кроме того, было бы желательно, чтобы упомянутые устройство и способ могли гарантировать безопасный и управляемый возврат объекта с его орбиты.
В контексте вышеописанной технической задачи одной целью настоящего изобретения является создание автономного устройства, выполненного с возможностью минимизировать или устранить недостатки, выводя более не используемые космические объекты, такие как искусственные спутники, с орбиты в космосе.
Другой целью настоящего изобретения является создание автономного устройства, выполненного с возможностью гарантировать высокую степень надежности в течение всего срока его службы, для обеспечения его правильной работы в любой момент.
Другой целью, образующей часть вышеописанной задачи, является создание автономного устройства, содержащего минимальное количество деталей и, следовательно, требующего ограниченных затрат на производство и сборку. Кроме того, другой целью настоящего изобретения является создание устройства, выполненного с возможностью завершить процедуру возврата объекта с его орбиты безопасно и управляемо.
Термин "автономное" для целей настоящего изобретения относится к устройству, которое соединено со возвращаемым или переводимым на другую орбиту спутником, но работает автономно, без использования каких либо систем спутника для операций возврата с орбиты или изменения орбиты.
Кроме того, другая цель настоящего изобретения относится к способу возврата космического спутника с его орбиты или перемещения этого спутника на другую орбиту удаленно, независимым возвращающим/перемещающим устройством, соединенным с самим спутником.
Эти цели достигаются с помощью устройства по п. 1 формулы изобретения. В частности, эти цели достигаются с помощью устройства, соединяемого со спутником до запуска, для возврата упомянутого спутника из космоса или перевода упомянутого спутника на другую космическую орбиту с помощью средства удаленного управления или упомянутого устройства, отличающегося тем, что устройство не зависит от упомянутого спутника и упомянутого средства удаленного управления и содержит:
- бортовое средство управления упомянутого устройства;
- средство для приема управляющих сигналов от упомянутого удаленного средства управления или средства, излучающего управляющие сигналы для активации последовательности возврата/перемещения, функционально соединенное с бортовым средством управления;
- двигательное средство, функционально соединенное с бортовым средством управления, при этом упомянутое двигательное средство активируется упомянутым бортовым средством управления при приеме управляющих сигналов на возврат упомянутого спутника из космоса в заранее определенную область Земли или на перевод упомянутого спутника на заранее определенную другую космическую орбиту;
- средство источника электропитания для упомянутого устройства, чтобы устройство было независимым от спутника;
- механическое соединительное средство для соединения упомянутого устройства с упомянутым спутником перед запуском;
- средство для уменьшения угловой ошибки вектора тяги, функционально соединенное с упомянутым бортовым средством управления.
Термин "удаленное средство управления" для целей настоящего изобретения относится к программному и/или аппаратному средству, выполненному с возможностью отправлять управляющие сигналы на устройство. Это программное и аппаратное средство является частью другого космического аппарата или орбитальной космической станции, или наземного пункта управления.
Имея вышеописанные характеристики, устройство по настоящему изобретению может осуществлять возврат с орбиты или перевод на другую орбиту спутника, с которым оно соединено, независимо от этого спутника и его рабочего состояния. Таким возвратом с орбиты или переводом на другую орбиту также можно управлять удаленно с помощью удаленного средства управления, передающего с другого космического аппарата или орбитальной космической станции, или с наземного пункта управления. Бортовое средство управления устройства осуществляет процедуру возврата орбиты или перевода на другую орбиту небольшим количеством несложных шагов.
Одновременное перемещение устройства и спутника позволяет устройству соответствующим образом ликвидировать спутник, с которым оно соединено, по окончании миссии этого спутника. В частности, такой процесс ликвидации осуществляется уводом спутника с его рабочей орбиты или возвратом спутника на Землю. Когда будут приняты необходимые управляющие сигналы, устройство по настоящему изобретению способно очистить пространство орбиты, ранее занимаемое соединенным с ним спутником и, тем самым, предотвратить помехи с его стороны другим спутникам или космическим аппаратам, находящимся на соседних орбитах. В частности, процедура входа в атмосферу выполняется безопасно и управляемо, что позволяет избежать нанесение какого-либо ущерба, вызванного падением на людей и имущество на Земле или столкновением с соседними космическими объектами, поскольку задается заранее определенная безопасная область на Земле, с которой столкнется спутник.
Средство для уменьшения угловой ошибки вектора тяги позволяет управлять траекторией возврата с орбиты или перехода на другую орбиту, когда горит топливо, не используя системы спутника. В частности, при уменьшении угловой ошибки устройство может поджигать топливо только один раз, без необходимости повторно поджигать топливо для управления траекторией устройства и спутника.
Предпочтительно устройство содержит средство для определения пространственного положения спутника и/или управления этим пространственным положением, функционально соединенное со средство уменьшения угловой ошибки. Более предпочтительно, средство для уменьшения угловой ошибки содержит средство для активного и/или пассивного управления вектором тяги, которое осуществляет выравнивание этого вектора тяги.
Таким образом, устройство управляет пространственным положением и/или вектором тяги и/или угловой ошибкой спутника во время работы двигателя устройства, позволяя спутнику двигаться по заранее определенной траектории к Земле или на новую расчетную орбиту. В частности, такое управление и выравнивание позволяют минимизировать необходимое количество топлива.
Предпочтительно средство для активного и/или пассивного управления вектором тяги осуществляет регулируемое и/или мобильное соединение между спутником и устройством для выравнивания вектора тяги. Таким образом управление угловой ошибкой не затрагивает двигательное средство и выравнивание вектора тяги может осуществляться просто и экономично.
Предпочтительно, средство для определения пространственного положения и/или управления пространственным положением спутника функционально соединено с бортовым средством управления и выполняет направленное управление устройством и спутником, когда активировано двигательное средство. Таким образом устройство осуществляет активное управление траекторией, позволяя устройству завершить операции возврата с орбиты и перемещения на другую орбиту безопасно и за небольшое количество шагов.
Предпочтительно устройство содержит средство безопасного зажигания, функционально соединенное с бортовым средством управления для приема сигнала управления зажиганием и для управления зажиганием двигательного средства. Таким образом, зажигание в устройстве возможно только тогда, когда устройство приняло сигнал безопасности, за счет чего предотвращается случайное зажигание или несанкционированное вмешательство в системы устройства.
Предпочтительно устройство содержит телекоммуникационное средство, функционально соединенное с бортовым средством управления для приема и/или отправки данных от устройства на удаленное средство управления, при этом телекоммуникационное средство содержит по меньшей мере средство для приема управляющих сигналов и/или по меньшей мере средство для передачи данных.
Предпочтительно, бортовое средство управления содержит средство для выдачи заранее запрограммированных управляющих сигналов и/или средство для вычисления этих управляющих сигналов, подлежащих отправке на средство для приема управляющих сигналов. Таким образом, устройство можно перевести в режим автономной работы, когда оно самостоятельно запускает последовательность зажигания.
Предпочтительно, устройство содержит первое средство датчика, функционально соединенное с бортовым средством управления, для обнаружения других объектов, находящихся в зоне безопасности, определенной вокруг устройства и/или спутника.
Более предпочтительно устройство содержит второе средство датчика, функционально соединенное с бортовым средством управления для обнаружения ущерба, нанесенного устройству и/или спутнику ударами. Более предпочтительно устройство содержит третье средство датчика, функционально соединенное с бортовым средством управления для обнаружения неисправностей спутника.
Более предпочтительно, устройство содержит четвертое средство датчика, функционально соединенное с бортовым средством управления для определения ориентации устройства во времени и/или для определения орбиты устройства и/или для определения пространственного положения устройства.
Предпочтительно, устройство содержит средство связи со спутником, функционально соединенное с бортовым средством управления; при этом средство связи сообщает о неисправностях спутника и/или передает управляющие сигналы для устройства.
Более предпочтительно устройство содержит средство для мониторинга состояния самого устройства, функционально соединенное с бортовым средством управления, и для передачи информации об этом состоянии на удаленное средство управления. Таким образом, устройство оснащено средствами и датчиками, выполненными с возможностью обнаруживать любые аномалии в работе самого устройства или в работе спутника, с которым оно соединено, что предпочтительно позволяет устройству ликвидировать неисправные спутники, возвратить которые в атмосферу более невозможно.
В случае серьезного повреждения спутника во время срока его службы, устройство по настоящему изобретению позволяет переместить поврежденный спутник на парковочную орбиту или инициировать его вход в атмосферу Земли, тем самым существенно снижая риск столкновения с другими спутниками.
Датчики близости позволяют избежать столкновений с любыми другими (даже ранее неизвестными) объектами, если они подойдут на данное безопасное расстояние к спутнику. Устройство по настоящему изобретению, таким образом, устраняет риск случайного столкновения спутника с другими неизвестными объектами на протяжении срока его службы на орбите.
Предпочтительно, средство источника электропитания содержит по меньшей мере перезаряжаемый источник питания. Таким образом, устройство обладает аварийной независимостью от спутника, даже в случае неисправности спутника или источника электропитания средства источника питания устройства.
Предпочтительно соединительное средство осуществляет регулируемое соединение между спутником и устройством. Более предпочтительно соединительное средство содержит средство активного и/или пассивного управления вектором тяги для осуществления такого регулируемого и/или мобильного соединения между спутником и устройством для выравнивания вектора тяги. Таким образом, угловая ошибка может устраняться также с помощью средства пассивного управления, без использования каких-либо вспомогательных двигателей для управления и выравнивания устройства во время движения.
Предпочтительно двигательное средство содержит по меньшей мере твердотопливный двигатель и по меньшей мере воспламенитель для твердотопливного двигателя, при этом воспламенитель функционально соединен с бортовым средством управления для приема момента воспламенения. Более предпочтительно, двигательное средство содержит один или более независимый картридж или заряд с твердым топливом. Альтернативно, двигательное средство содержит гибридное двигательное средство, или двигательное средство с гелеобразным топливом.
Вышеописанные цели также достигаются с помощью способа по п. 22 формулы изобретения. В частности, вышеописанные цели достигаются с помощью способа возврата с орбиты космического спутника, оснащенного независимым перемещающим/возвращающим устройством, или перевода этого спутника на другую орбиту с помощью удаленного средства управления или этим устройством, отличающегося тем, что содержит этапы, на которых:
- рассчитывают с помощью удаленного средства управления или упомянутого устройства требуемую новую космическую орбиту или требуемую траекторию, приводящую к столкновению с областью Земли, соответственно;
- рассчитывают с помощью удаленного средства управления или упомянутого устройства момент активации перемещающего/возвращающего устройства для выхода на новую орбиту или на новую траекторию на основе фактической занимаемой спутником орбиты;
- отправляют от удаленного средства управления на перемещающее/возвращающее устройство управляющий сигнал или запускают процедуру возврата с орбиты/изменения орбиты упомянутым устройством для перевода спутника на новую расчетную орбиту или траекторию;
- осуществляют включение двигательного средства перемещающего/возвращающего устройства в расчетный момент, когда оно принимает управляющий сигнал.
При наличии вышеуказанных характеристик способ по настоящему изобретению позволяет выполнить возврат с орбиты или изменение орбиты спутника соединенным с ним автономным устройством. Этот способ позволяет просто и управляемо спустить с орбиты спутник или изменить его орбиту, заранее рассчитав безопасную область падения на Землю или новую космическую орбиту.
Предпочтительно, способ также содержит этап, на котором отправляют сигнал безопасности от удаленного средства управления на упомянутое средство для приема управляющих сигналов перемещающего/возвращающего устройства для активации рабочего состояния перед отправкой упомянутых управляющих сигналов для перевода упомянутого спутника на новую расчетную орбиту или траекторию.
Таким образом, старт операций возврата или изменения орбиты возможен только, если на устройство будет послан сигнал безопасности, что предотвращает спонтанное включение двигателя или несанкционированное вмешательство в устройство.
Другие признаки и преимущества настоящего изобретения будут понятны из нижеследующего описания предпочтительных вариантов, не ограничивающие примеры которых проиллюстрированы на приложенных чертежах, где:
Фиг. 1 - схематическое представление типов орбит, используемых для спутников и способов возврата с орбиты с применением устройства по настоящему изобретению.
Фиг. 2 - схематическое сечение первого варианта осуществления устройства по настоящему изобретению.
Фиг. 3 - схематическое сечение второго варианта осуществления устройства по нестоящему изобретению, содержащего регулируемое механическое соединительное средство.
Фиг. 4 - схематическое сечение регулируемого механического соединительного средства по фиг. 3.
Фиг. 5 - схематический вид версии активного управления регулируемым механическим интерфейсом по другому варианту осуществления устройства по настоящему изобретению.
Фиг. 6 - схематический вид версии активного управления регулируемым механическим интерфейсом по другому варианту осуществления устройства по настоящему изобретению.
Фиг. 7 - схематический вид версии активного управления регулируемым механическим интерфейсом по другому варианту осуществления устройства по настоящему изобретению.
Фиг. 8 - схематический вид версии активного управления регулируемым механическим интерфейсом по другому варианту осуществления устройства по настоящему изобретению.
Фиг. 9 - схематический вид версии активного управления регулируемым механическим интерфейсом по другому варианту осуществления устройства по настоящему изобретению.
Фиг. 10 - схематический вид детали, используемой в механическом регулируемом интерфейсе по фиг. 9.
Фиг. 11 - схематический вид клапана, используемого в средстве, показанном на фиг. 10, когда, находясь в закрытом положении, он препятствует любому вытеканию текучей среды.
Фиг. 12 - схематический вид клапана, используемого в средстве, показанном на фиг. 10, когда, находясь в открытом положении, он допускает боковое вытекание текучей среды.
Фиг. 13 - схематическое сечение другого варианта осуществления устройства по настоящему изобретению, оснащенного средством для уменьшения угловой ошибки вектора тяги.
Фиг. 14 - схематический вид сверху устройства по фиг. 13.
Фиг. 15 - схематическое сечение еще одного варианта осуществления устройства по настоящему изобретению, оснащенного средством для уменьшения угловой ошибки вектора тяги.
Фиг. 16 - схематическое представление обмена управляющими сигналами и/или информацией между станцией на Земле и устройством для удаленного управления им по настоящему изобретению.
Фиг. 17 - блок-схема алгоритма управляющих воздействий для базовой операции устройства по настоящему изобретению.
Фиг. 18 - расширенная блок-схема алгоритма управляющих воздействий относительно представления на фиг. 17.
Фиг. 19 - расширенная блок-схема алгоритма управляющих воздействий относительно представления на фиг. 18.
Фиг. 20 - расширенная блок-схема алгоритма управляющих воздействий относительно представления на фиг. 19.
Фиг. 21 - гибридный реактивный двигатель.
Фиг. 22 - реактивный двигатель с гелеобразным топливом.
Далее следует подробное описание устройства по настоящему изобретению.
На фиг. 1 схематически показано устройство по настоящему изобретению, связанное со спутниками 20′, 20" двух разных типов, обращающихся по орбите вокруг небесного тела 1, например, Земли. Более конкретно, спутник 20′ работает на низкой орбите 2 (LEO), и должен быть спущен с орбиты к поверхности Земли во время заданного пространственного и временного окна. В процессе возврата положение и ориентация системы устройство-спутник должны обеспечивать безопасный и управляемый вход системы в атмосферу, когда устройство по настоящему изобретению деблокировано. Второй спутник 20" работает на высокой орбите (MEO или GEO) 3. Этот случай, например, относится к спутникам с высокой добавленной стоимостью, таких как телекоммуникационные геостационарные спутники или научные спутники. Эти спутники должны переводиться на парковочную орбиту 4, которая расположена еще дальше от Земли, чем их рабочая орбита и это должно делаться так, чтобы избежать помех другим спутникам или космическим аппаратам.
Далее следует подробное описание первого варианта устройства 10 по настоящему изобретению со ссылками на фиг. 2.
Устройство 10 содержит корпус 110 контейнера, предпочтительно цилиндрической формы, и выполненный из металлического или композитного материала. Металлические материалы, используемые для этой цели предпочтительно являются алюминием или сталью, но можно использовать и другие металлические материалы. Корпус 110 предпочтительно состоит из трех частей, включая выпуклую или полусферическую головную часть 112, цилиндрическую центральную часть 114 и плоскую конечную часть 116, которая может быть выпуклой. Эти части могут изготавливаться отдельно фрезерованием, точением и/или ротационным выдавливанием, затем соединяться друг с другом, предпочтительно сваркой, например, периферийной лазерной сваркой или сваркой электронным лучом. В равной степени эти три части можно соединять друг с другом механическими средствами, такими как свинчиваемыми фланцами, винтовыми соединениями или клеевыми соединениями, или любым другим способом соединения. Если заряд топлива для двигательного средства приклеен к корпусу 110, топливо, заливаемое в центральную часть 114 твердеет, тем самым соединяя головную часть 112 и конечную часть 116 с центральной частью 114, как описано выше. Герметичность различных сегментов предпочтительно обеспечивается теми же сварными швами или эластомерными прокладками. Альтернативно, головная часть и центральная часть могут быть выполнены в форме единого сферического контейнера (не показан). Применение композитных материалов позволяет создать более легкий корпус 110, но эти материалы имеют более короткий срок службы, в условиях вакуума и космоса в целом, например, из-за радиации и поэтому они должны быть защищены.
Устройство 10 также содержит двигательное средство в форме одного или более твердотопливного двигателя, каждый из которых оснащен одним или более независимым картриджем с твердым топливом. Эти двигатели содержат по меньшей мере один заряд 212 твердого топлива, имеющий соответствующую форму, по меньшей мере камеру 214 сгорания и по меньшей мере один воспламенитель 216 для этого твердого топлива. Это двигательное средство также содержит по меньшей мере одно выпускное сопло 218 для выпуска продуктов сгорания, предпочтительно установленное так, чтобы оно было направлено в сторону, противоположную вектору орбитальной скорости. Вышеописанные компоненты двигательного средства заключены по существу в цилиндрический контейнер, который также содержит заряд 212 топлива, отделенный от них слоем внутренней облицовки, как более подробно будет описано ниже. В описываемом варианте этот контейнер совпадает с корпусом 110 самого устройства. Альтернативно двигательное средство устройства может иметь форму одного или более гибридного двигательного средства, как показано на фиг. 21.
Гибридное двигательное средство содержит ракетный двигатель, в котором применяются смеси топлива, имеющего разную форму, например, твердое топливо и жидкое топливо, или твердое топлива и гелеобразное топливо. Такой двигатель содержит кожух 213′, в котором заключено газообразное или жидкое или гелеобразное топливо, соединенный с отдельной камерой 214′ сгорания, содержащей твердое топливо и снабженной воспламенителем 261′. Соединение между кожухом 213′ и камерой 214′ сгорания осуществляет один или более клапан 111′, регулирующий расход топлива от инжектора 112′ кожуха 213′ в камеру 214′сгорания. Кроме того, двигатель содержит выпускное сопло 218′, имеющее сходящуюся-расходящуюся форму для выпуска продуктов сгорания и предпочтительно установленное так, чтобы быть направленным в сторону, противоположную вектору орбитальной скорости, преобразуя горячие газы в тягу. Кожух 213′ для не твердого топлива может находиться под давлением для облегчения движения потока.
По сравнению с твердотопливным, гибридный двигатель имеет улучшенные характеристики, более безопасен, поскольку топливо и окислитель хранятся в отдельных емкостях, и его можно многократно воспламенять после остановки, тем самым модулируя тягу. При наличии такого двигателя устройство будет минимизировать угловую ошибку тяги или ошибки траектории, выполняя один или более орбитальных маневров. Альтернативно двигательное средство устройства может иметь форму одного или более двигательного средства на гелеобразном топливе, как показано на фиг. 22.
Двигательное средство на гелеобразном топливе содержит ракетный двигатель, в котором используется двухкомпонентное топливо в котором топливо и окислитель загущены. Такой двигатель содержит первый кожух 212", содержащий загущенное топливо, и второй кожух 213", содержащий загущенный окислитель. Как показано на фиг. 22, второй кожух 213" расположен в центральной части устройства, а первый кожух 212" окружает второй кожух 213". Можно также хранить топливо и окислитель совместно, как загущенную смесь, в одном кожухе. Двигатель содержит отдельную камеру 214" сгорания, соединенную с кожухами 212", 213" одним или более клапаном 110", 111", который регулирует расход гелеобразного топлива из инжектора 112" кожухов 212", 213" в камеру 214" сгорания. Кроме того, двигатель содержит выпускное сопло 218", имеющее сходящуюся-расходящуюся форму для выпуска продуктов сгорания и предпочтительно установленное так, чтобы быть направленным в сторону, противоположную вектору орбитальной скорости, преобразуя горячие газы в тягу. Кожухи 212", 213" для гелеобразных компонентов топлива могут находиться под давлением для облегчения движения потока.
По сравнению с твердотопливным двигателем гибридные двигатели допускают многократное воспламенение после остановки, тем самым позволяя модулировать тягу. С такими двигателями устройство будет минимизировать угловую ошибку тяги или ошибки траектории, осуществляя один или более орбитальный маневр.
Устройство далее может содержать средство безопасного воспламенения, функционально соединенное с бортовым средством управления для приема управляющих сигналов воспламенения и для управления воспламенением двигательного средства. В частности, средство безопасного воспламенения может быть частью двигательного средства как блок безопасности и воспламенения, интегрированный в воспламенитель.
В этом варианте воспламенитель 216 и, следовательно, блок безопасности и воспламенения, функционально соединен с бортовым средством управления, которое описано ниже, для приема сигнала воспламенения. Эти сигналы могут быть зашифрованы для защиты и предотвращения вмешательства и несанкционированного воспламенения. Воспламенитель 216 содержит заряд энергетического материала, расположенного внутри контейнера соответствующей формы (предпочтительно, цилиндрической). В этом варианте, который содержит твердотопливный реактивный двигатель, такой контейнер имеет отверстие, ориентированное в направлении главного заряда твердого топлива. В описываемом варианте воспламенитель 216 вставлен в цилиндрическое отверстие в заряде 212 топлива. Когда воспламенитель 216 включен, это отверстие позволяет продуктам сгорания войти в контакт с главным зарядом топлива 212 и, следовательно, воспламенить его. Отверстие, предпочтительно, является круглым, уплотнено обычной металлической фольгой, предназначенной для разрыва как только будет включен воспламенитель 216. Заряд внутри воспламенителя 216 может содержать разные типы известных смесей для генерирования горячих газов и большего количество частиц раскаленного оксида металла которые, в свою очередь, могут воспламенить главный заряд топлива 212 при контакте с ним. Можно использовать смеси бора и калиевой селитры или калиевую селитру, или пиротехнические заряды в целом, с факультативной добавкой заряда обычного твердого топлива в качестве резервного заряда. Такой заряд может быть цилиндрическим с центральным отверстием, или просто цилиндрическим куском топлива, или он может состоять из множества небольших кусков топлива, чтобы увеличенная общая площадь поверхности горения уменьшала время горения воспламенителя. Если воспламенитель 216 содержит только пиротехническую смесь, вся она находится внутри воспламенителя. С другой стороны, если еще имеется и резервный заряд, этот заряд и пиротехническая смесь внутри воспламенителя 216 разделены тонкой мембраной. При воспламенении пиротехнической смеси эта мембрана разрушается, что приводит к воспламенению резервного заряда и разрушению фольги, закрывающей отверстие воспламенителя 216. Это приводит к высвобождению продуктов сгорания из воспламенителя 216 в сторону главного заряда 212 топлива. Пиротехническая смесь может иметь форму зерен или небольших гранул, в зависимости от размеров устройства 10. Контейнер для воспламенителя 216 выставлен соосно с главным зарядом и выполнен с возможностью разрыва при срабатывании воспламенителя 216. Воспламенитель предпочтительно соединен с головной частью 112 корпуса 110 например, резьбовым соединением, которое уплотнено эластомерными кольцевыми уплотнениями круглого сечения или, например, с помощью клея. Альтернативно, воспламенитель 216, описанный выше, может быть вставлен непосредственно в центральное отверстие заряда 212.
Блок безопасности и воспламенения (не показан) приводится в действие электрическими сигналами, генерируемыми бортовым средством управления, с которым он функционально соединен, и используется для включения воспламенителя 216. Блок безопасности и воспламенения может содержать подключенный высоковольтный воспламенитель, автономный низковольтный воспламенитель, или подключенный низковольтный воспламенитель. В блоке безопасности и воспламенения, оснащенном высоковольтным подключенным воспламенителем, импульс на воспламенение передается непосредственно на заряд воспламенителя 216 с помощью детонатора с взрывающейся фольгой или мощного детонатора, интегрированного в пиротехнический заряд воспламенителя 216 или расположенного рядом с ним. Эти механизмы хорошо известны в литературе. Блок с автономным низковольтным воспламенителем состоит из электрического кабеля, утопленного в небольшое количество пиротехнической смеси, идентичной или аналогичной смеси в воспламенителе 216. Эта смесь инкапсулирована и уплотнена. Воспламенитель сделан нечувствительным к любым электромагнитным помехам с помощью электрического фильтра. Электроника воспламенителя также может содержать интегрированную проверочную цепь для проверки состояния детонатора с взрывающейся фольгой или низковольтных воспламенителей. Альтернативно, состояние случайного включения автономной низковольтной версии можно обнаружить, если поршень, который она содержит, движется и, следовательно, изменяет состояние цепи, например, разрывая диск конца хода, или нажимая на кнопку. Блок безопасности и воспламенения можно сделать еще более безопасным, добавив один или более транзистор. В частности, сигналы включения и воспламенения, посылаемые бортовым средством управления передаются на активные компоненты воспламенителя 216 (электрический заряд конденсатора или детонатор с взрывающейся фольгой, или низковольтный воспламенитель) только если транзисторы включены отдельными сигналами, генерируемыми электрически развязанными и полностью независимыми электронными платами.
Как описано выше, заряд 212 топлива в первом варианте осуществления (показанном на фиг. 2) предпочтительно прикреплен к корпусу 110. Альтернативно, двигательное средство содержит один или более независимых твердотопливных картриджей. Эти отдельные картриджи предпочтительно также прикреплены к корпусу 110. Заряд 212 топлива также может быть разделен на два отдельных сегмента мембраной так, чтобы выдавать двойной импульс. Газы, генерируемые первым зарядом, таким образом, выпускаются через сопло 218, а газы, генерируемые вторым сегментом, достигают сопла 218 по каналу (не показан), который защищен слоем абляционного материала, например, фенольной смолой, армированной кварцем. Объемы горения двух зарядов разделены мембраной, которая предотвращает их одновременное воспламенение. Поэтому второй заряд воспламеняется дополнительным воспламенителем (не показан). Состав твердого топлива и форма зерен должны иметь такие характеристики, чтобы гарантировать заполнение этим топливом имеющегося объема и максимизацию удельного импульса, и в то же время, быть почти нечувствительным к давлению. В частности, форма заряда и состав используемого топлива должны максимизировать его характеристики и минимизировать массу и объем, в то же время соответствуя требованиям к надежности. Заряд 121 твердого топлива также может иметь характеристики горения с уменьшением тяги, потребляя большую часть топлива сразу после воспламенения, а затем - как можно меньшее количество топлива. Скорость горения может быть как можно более высокой, в зависимости от потребности в максимальной тяге, определяемой структурными характеристиками спутника 20′, 20" и механическим соединительным интерфейсом между устройством и спутниками 20′, 20", который будет описан ниже. Если же заряд находится в картридже, топливо закладывается в резиновый контейнер, который в свою очередь прикреплен к корпусу 110. Если топливо закладывается непосредственно в корпус 110, как описано в отношении первого варианта по фиг. 2, то заряд 212 топлива крепится к корпусу 110 слоем облицовки, т.е., эластомера, который может быть выполнен из того же связующего, что и топливо 212, и содержать наполнитель, например сажу. Эта облицовка связывается с зарядом 212 топлива с помощью избыточного количества агента, образующего сетчатый узор и связующего агента. Отношение длины к диаметру заряда 212 топлива обычно очень мало, чтобы минимизировать общую длину устройства 10.
Продукты сгорания выходят через выпускное сопло 218, которое является интегральной частью корпуса 110, чтобы создать необходимую тягу, как описано выше. В первом варианте, показанном на фиг. 2, это сопло имеет сходящуюся-расходящуюся форму, и выполнено из металлического или керамического материала в зависимости от материала, примененного для изготовления корпуса 110, к которому оно прикреплено. Сопло 218 может быть по меньшей мере частично внедрено в корпус 110 для уменьшения габаритов устройства 10. Сопло, изготовленное из металлического материала (например, алюминия, стали и т.п.), можно защитить от горячих гадов, генерируемых в процессе горения, с помощью соответствующего слоя абляционного материала, такого как фенольная смола, армированная кварцем или любой другой известной композицией. Если время горения ограничено, без такой защиты можно обойтись. Керамическое сопло может быть изготовлено из монолитного керамического материала или керамического материала, армированного композитным материалом, содержащим длинные или короткие волокна. Оно предпочтительно изготовлено из керамического материала "углерод-углерод" (углеродные волокна в углеродной матрице), или C-SiC (углеродные волокна в матрице из карбида кремния), или даже С-С/SiC (углерод-углерод/карбид кремния). Диаметр канала в сопле 218 достаточно велик, чтобы генерировать большую тягу и выпускать существенных поток газа, минимизируя общее время горения. В первом варианте осуществления сопло 218 прикреплено к конечной части 116 корпуса 110 болтами 218′, 218". Альтернативно, сопло 218 может быть размещено внутри специального контейнера, который привинчен или как-либо прикреплен к корпусу 110 двигательного средства. Или оно может быть прикреплено непосредственно к корпусу 110 или установлено с помощью фланца, интегрированного в форму сопла 218. В этом варианте сходящееся-расходящееся сопло 218 соединено с корпусом 110, который служит камерой сгорания.
Сопло 218 также содержит герметичное уплотнение (не показано), состоящее из мембраны которая покрывает сопло, отделяя заряд 212 твердого топлива от внешней среды. Это позволяет предотвратить какое-либо загрязнение твердого топлива при транспортировке с места изготовления на место запуска за счет влажности, или не допустить потери летучих веществ, таких как пластификатор топлива. Мембрана предпочтительно изготовлена из металла или пластика и приварена к металлическому кольцу с резьбой или нанесенным на него клеем. Кольцо уплотняется эластомерной облицовкой, такой как уплотнительные кольца круглого сечения, или приваривается или приклеивается к соплу 218. Уплотнение имеет слой тепловой защиты, чтобы предотвратить любой чрезмерный перенос тепловой энергии между внешней средой и внутренней полостью устройства 10. На мембране предпочтительно выгравирован крестовидный рисунок, чтобы она могла раскрываться, когда происходит воспламенение двигателя устройства 10. Такой рисунок позволяет мембране раскрыться на четыре секции одинакового размера, которые, тем не менее остаются прикрепленными к кольцу, и, следовательно, к соплу 218, тем самым предотвращая загрязнение космоса дополнительным мусором. Альтернативно, мембрана может быть ослаблена рядом с окружностью кольца и прикреплена цепочкой или проволокой к другой части сопла 218. В обоих случаях риск ухода частей уплотнения в космос устраняется или минимизируется, предотвращая дополнительное загрязнение орбиты.
Двигательное средство функционально соединено с бортовым средством управления (на чертежах не показано), обслуживающим устройство 10, предпочтительно содержащим электронные контроллеры, защищенные от электромагнитных помех или радиации, встречающейся в космосе. В описываемом варианте бортовое средство управления конкретно состоит из электронной платы, оснащенной микроконтроллерами и электронным и/или электрическим интерфейсом для соединения с другими средствами, образующими устройство 10, функционально соединенными с ним. В частности бортовое средство управления отправляет команды на эти средства в устройстве 10 и получает от них информацию. Такое бортовое средство управления также обеспечивает независимость устройства 10 от спутника 20′, 20", который подлежит возврату с орбиты или переводу на другую орбиту. Другой функцией бортового средства управления в этом варианте является обработка управляющих сигналов, и обмен сигналами с приемопередающим устройством на наземной станции или на других космических аппаратах. Связанное с двигательным средством бортовое средство управления осуществляет включение и воспламенение устройства 10, тем самым позволяя активировать средство безопасности и воспламенения и, следовательно, двигательное средство или, более конкретно, воспламенитель 216.
Другим назначением бортового средства управления является передача данных о состоянии работы устройства 10 и/или спутника 20′, 20" на Землю или на другой космический аппарат, или на спутник 20′, 20" с которым соединено устройство 10, с помощью телекоммуникационного блока, зарегистрировав эти данные с помощью соответствующих датчиков, как более подробно описано ниже.
Средство приема управляющих сигналов (не показано) содержит одну или более остронаправленную или широконаправленную антенну и электрический и/или электронный интерфейс между антеннами и бортовым средством управления, с которым оно функционально соединено. Это средство приема управляющих сигналов предпочтительно является частью телекоммуникационного средства (не показано), функционально соединенного с бортовым средством управления. В частности, в этом варианте телекоммуникационное средство также содержит дополнительное средство для передачи данных, включая, по меньшей мере, одну передающую антенную для отправки сигналов, и соответствующее устройство для приема сигналов. Обмен такими сообщениями преимущественно выполняется непосредственно с наземной приемной станцией или с аппаратом, находящимся в космосе, с использованием соответствующей коммуникационной полосы частот. Такая связь позволяет проверять состояние устройства 10 и/или соединенного с ним спутника 20′, 20", как описано ниже. Этот канал связи также позволяет отправлять сигналы подтверждения, относящиеся, например, к эффективному включению или воспламенению устройства. Сигналы, принимаемые и посылаемые телекоммуникационным средством, идущие с Земли или из космоса, имеют характеристики передачи, которые предназначены для минимизации их массы и объема. Телекоммуникационное средство выполнено защищенным от электромагнитных помех и радиации, которая присутствует в космосе.
Средство источника электропитания (не показано) для устройства 10 предпочтительно содержит одну или более перезаряжаемые или неперезаряжаемые первичные батареи, соединенные друг с другом так, чтобы обеспечить достаточно энергии для воспламенения устройства 10 при возникновении необходимости. Подаваемая энергия также должна подпитывать другие компоненты устройства 10 на протяжении срока их службы. Если батареи являются перезаряжаемыми, они могут заряжаться непосредственно от спутника 20′, 20", с которым соединено устройство 10, при наличии электрического соединения между спутником или устройством. В предпочтительном варианте эти батареи можно заряжать, используя любую форму генерирования энергии, которая может работать в космосе, например, фотогальваническую технологию. Их можно заряжать, используя магнитное поле планеты, или устройство, вырабатывающее энергию за счет разницы температур между двумя точками на устройстве 10 (например, между точкой, обращенной к Солнцу и точкой, находящейся в тени). Такое средство источника электропитания также защищено от электромагнитных помех и радиации, присутствующей в космосе. Средство источника электропитания функционально соединено с бортовым средством управления, на которое оно также подает питание, и управляется им.
Механическое соединительное средство 310 соединяет устройство 10 со спутником 20′, 20" еще до его запуска. В этом варианте такое соединение со спутником осуществляется с помощью платформы механического интерфейса. Такое механическое соединение выполняется до запуска, то есть, до ввода спутника в эксплуатацию. Механическое соединительное средство 310, таким образом, позволяет выполнить одновременное перемещение спутника 20′, 20" и устройства 10, когда устройство 10 активируется для возврата с орбиты или для изменения орбиты системы устройство-спутник.
В первом варианте, показанном на фиг. 2, механическое соединительное средство 310 содержит одно фиксированное соединение между устройством 10 и спутником 20′, 20", расположенное центрально относительно головного участка 112 устройства 10.
Устройство 10 также оснащено средством тепловой защиты. В описываемом варианте осуществления это средство тепловой защиты содержит пассивную теплоизоляцию для ограничения изменений температуры в наиболее важных компонентах устройства 10 и обеспечения низких перепадов температуры. Это делается потому, что высокая температура, например, ускоряет химическое старение топлива и облицовки. С другой стороны, низкотемпературные тепловые циклы приводят к напряжению и деформациям топлива, отрицательно влияя на объем, которое оно занимает и, следовательно, на его рабочие характеристики. Ограничение минимальной температуры, которую топливо может иметь на орбите, приводит, таким образом, к улучшению его рабочих характеристик. Для такого топлива минимальная допустимая температура приблизительно совпадает с температурой стеклования (для топлив на основе полибутадиена с гидроксильными концевыми группами минимальная температура не должна опускаться ниже -60°С или -80°С, в зависимости от скорости охлаждения). Максимальная допустимая температура - это такая температура, при которой химические свойства топлива начинают слишком быстро ухудшаться или даже происходит воспламенение (максимальная температура не должна превышать 70°С или 80°С). Тепловой изоляции требуют и другие компоненты, такие как электронные блоки и элементы, образующие средство источника питания. Система теплоизоляции предпочтительно состоит из многослойных изоляторов (MLI), т.е., слоев изоляционного материала, находящихся внутри металлической фольги, специально подобранной краски или других пассивных или активных систем. Пассивная теплоизоляция является фундаментальным фактором обеспечения равномерной температуры в заряде топлива и в любых небольших, вспомогательных одноразовых ракетах, как будет описано ниже. Еще более предпочтительно, изоляция может содержать слой материала с высокой электропроводностью, вставленный под несколько изолирующих слоев. В настоящем варианте осуществления дополнительная активная теплоизоляция предпочтительно используется для защиты электроники устройства 10 и его средства источника электропитания, когда пассивная теплоизоляция неадекватно управляет разницей температур в этих компонентах. Альтернативно, такую активную систему можно применять самостоятельно, если пассивная система становится ненужной для тепловой защиты компонентов устройства 10. Дополнительно, если спутник 20′, 20" оснащен тепловой защитой, можно выполнять совместные действия, позволяющие ограничивать температурные изменения в устройстве 10.
При сборке устройства 10 на спутнике 20′, 20", могут возникнуть небольшие угловые ошибки вектора тяги относительно главных осей инерции, которые проходят через центр масс системы устройство-спутник. Центр тяжести системы также может неконтролируемо изменяться на протяжении срока службы спутника 20′, 20" (например, из-за неисправности последнего), что приведет к чрезмерно большой угловой ошибке вектора тяги для эффективной работы устройства 10. Чтобы не допустить такую ситуацию устройство оснащено средством для уменьшения угловой ошибки вектора тяги, функционально соединенным с бортовым средством управления. В частности, это средство уменьшения угловой ошибки может содержать средство для активного и/или пассивного управления вектором тяги, которое воздействует на выравнивание вектора тяги, как описано ниже в связи с другим вариантом.
Устройство далее может содержать средство для определения пространственного положения и/или управления пространственным положением спутника, к которому оно присоединено, функционально соединенное со средством для уменьшения угловой ошибки. Кроме того, это средство для определения пространственного положения и/или управления пространственным положением спутника функционально соединено с бортовым средством управления и выполняет управление направлением устройства и спутника, когда активировано двигательное средство.
Средство активного и/или пассивного управления вектором тяги осуществляет регулируемое и/или мобильное соединение между спутником и устройством и используется в варианте осуществления, описываемом ниже. В этом варианте осуществления воздействие на выравнивание вектора тяги осуществляет активно или пассивно регулируемый механический интерфейс.
Во втором варианте, показанном на фиг. 3, устройство 20 соответствует устройству по первому варианту, описанному выше, но также содержит регулируемое средство 320 для механического соединения со спутником 20′, 20". Это механическое соединительное средство 320 осуществляет регулируемое и/или подвижное соединение между спутником 20′, 20" и устройством 20. Оно позволяет регулировать ориентацию устройства 20 во время сборки и/или осуществлять пассивное управление системой для выравнивания направления тяги с центром масс спутника 20′, 20", возможно с блокировкой по завершении такого выравнивания.
Регулируемое механическое соединительное средство 320 для устройства 20 по фиг. 3, более подробно показано на фиг. 4. Это средство выполнено в форме пассивного регулируемого механического интерфейса, содержащего первую часть 322, находящуюся в контакте с устройством 20, и вторую часть 324, находящуюся в контакте со спутником 20′, 20". Регулируемое механическое соединительное средство 320 также содержит сферический шарнир, в котором два фланца 326′, 326" с полусферическим углублением на одной стороне и фиксированный плоский интерфейс на другой (в контакте с первой частью) охватывают пустотелую сферу 325. Устройство 20, таким образом, может поворачиваться относительно центральной оси спутника 20′, 20" с помощью относительного движения первой части 322 по сфере 325. Точная регулировка достигается поворотом сферического шарнира после того, как он будет установлен на фланцах 326′, 326". Для сведения угловой ошибки вектора тяги до нуля, устройство можно поворачивать до тех пор, пока ось сопла 228 в двигательном средстве не пройдет через центр тяжести систему устройство-спутник. Затем шарнир фиксируется в требуемом положении с помощью соответствующего количества болтов 328′, 328". Если сфера 325 выполнена из более мягкого материала, чем болты 328′, 328", тогда болты ввинчиваются на место, пока они не перфорируют сферу, тем самым запирая ее на месте. В противном случае использование достаточного количества болтов или больших резьбовых шпилек помешало бы вращению сферы 325, например, из-за трения. Альтернативным решением является применение сферы из магнитного материала, вместо полости из немагнитного материала. Привинчивание магнитных полюсов, пока они не подойдут достаточно близко к сфере, позволит магнитной силе предотвратить ее поворот. Чтобы не допустить ослабления болтов или винтов, выбранный материал не должен испытывать напряжение в результате перепадов температуры, возникающих когда спутник запускается или находится на орбите. Винты предпочтительно зафиксированы с помощью клея для фиксации резьбы.
В другом варианте осуществления (не показан) сопло 218 соединено с корпусом 110 с помощью гибкого соединения. Такое решение полезно в особых случаях, например, для спутников, работающих на геостационарной орбите. Когда используется такое решение, если интерфейс для механического соединения (описываемого ниже) является регулируемым, это решение можно упростить так, чтобы регулировка проводилась только до запуска спутника, на этапе сборки. Применение гибкого соединения устраняет необходимость в системе для уменьшения угловой ошибки вектора тяги, например, описываемой ниже.
Однако в некоторых случаях наилучшим способом полностью использовать потенциал настоящего изобретения является активное управление направлением вектора тяги посредством регулируемого интерфейса. Такая активная система особенно эффективна, когда центр тяжести спутника 20′, 20" изменяется во время миссии и невозможно вычислить его положение заранее, до включения устройства 10 (например, из-за неисправности спутника 20′, 20"). Активное управление вектором тяги также полезно в случаях небольших спутников 20′, 20" с относительно небольшими моментами инерции, тангажа и рыскания, отсутствия системы уменьшения угловой ошибки вектора тяги (описываемой ниже) и когда устройство 10 создает необходимый импульс за относительно долгое время. Активный способ регулировки направления тяги и соответствующее активное мобильное механическое соединительное средство могут использовать гидравлические, электрические или газовые поршни, расположенные между второй частью 324 и фланцами 326′, 326". Регулировка зависит от положения поршней и ей легко можно управлять посредством инерционной платформы и стандартной системы пропорционального управления. Для управления одной осью нужен один поршень, для управления двумя осями нужны два поршня и т.д., т.е., чем большим количеством осей нужно управлять, тем больше потребуется поршней.
Вариант активного управления регулируемым механическим интерфейсом 330 представлен в варианте по фиг. 5. Положение относительно угла поворота вокруг оси, например, оси тангажа, регулируется с помощью пары шарнирно установленных цилиндров 332′, 332", которые смещены от центра главного шарнира 334. Когда главный шарнир 336 для управления второй осью заперт, а цилиндры 332′, 332" работают, происходит поворот второй части 324 подвижного соединительного средства 330 и, следовательно, соединенного с ней спутника 20′, 20". Это позволяет выполнить взаимный поворот устройства и спутника вокруг первой оси, например, оси тангажа. Шарнир 337 в соединении (состоящий, например, из стержня внутри отверстия) предотвращает возникновение любого изгибающего момента. Управление положением, например, углом поворота относительно другой оси (например, оси рыскания) осуществляется идентично описанному выше и выполняется идентичным механизмом, расположенным под или над механизмом управления рысканием и повернутым на 90°. Более компактная версия (не показана) мобильного механического соединения может быть выполнена с использованием крестовины. Эта крестовина содержит два стержня, отделенных друг от друга и соединенных друг с другом в центре с помощью цилиндрического элемента. Этот цилиндрический элемент может быть отфрезерован или выполнен из проточенных цилиндрических прутков, которые затем свинчены, сварены или склеены друг с другом. Верхний стержень допускает поворот фланца, обращенного к спутнику, а нижний стержень допускает поворот фланцев, контактирующих с устройством.
Другой вариант осуществления, отличающийся активно управляемым регулируемым механическим соединительным средством 340′ 340", показан на фиг. 6 и 7. Управление положением тангажа или крена или относительно обеих этих осей осуществляется с помощью двух цилиндров со сферическим шарниром на их вершине (341, 341′, 342, 342′) которые установлены на одной линии со второй частью 344′, 344", контактирующей со спутником 20′, 20". В частности, эта часть на фиг. 6 показана куполообразной, а на фиг. 7 - плоской, но она может иметь любую другую форму. В этом варианте вторая часть 344, 344′ допускает соединение и со спутником, и с устройством. В центре этой второй части 344, 344′ имеется сферический шарнир 346, 346′, который допускает поворот и не требует осевого смещения. Вышеописанные два цилиндра 341, 341′, 342, 342′ и сферический шарнир 346, 346′ также расположены под углом приблизительно 120° относительно друг друга на поверхности второй части 344, 344′. Если один из цилиндров 341, 341′, 342, 342′ движется, поверхность второй части 344, 344′ наклоняется относительно оси, соединяющей другой цилиндр со сферическим шарниром 346, 346′. Управление поршнями двух цилиндров 341, 341′, 342, 342′, таким образом, позволяет выполнять любой необходимый поворот вектора тяги. Эти поршни могут управляться электрическим, гидравлическим или пневматическим способом.
Другой вариант осуществления активно управляемого регулируемого механического соединительного средства 350 показан на фиг. 8. Этот вариант, как и описанные выше со ссылками на фиг. 6 и 7, содержит два цилиндра 352, 352′, но они имеют конструкцию, отличающуюся от описанных выше. Базовая часть 351 этого регулируемого механического соединительного средства 350 может соединяться со спутником 20′, 20", или с устройством по настоящему изобретению. Средство содержит первые цилиндры 352, 352′, содержащие первые поршни 353, 353′, которые могут приводиться в действие электрическим, гидравлическим или пневматическим способом. Поршень 353, 353′ может поворачиваться вокруг своей оси и прикреплен к регулируемому механическому соединительному средству 350 с помощью шарнира 354, 354′. Второй поршень 355, 355′ соединен с шарниром 354, 354′ так, что он может поворачиваться относительно цилиндра 352, 352′ и, следовательно, также относительно первого поршня 353, 353′. На стороне, противоположной шарнирам 354, 354′ этот второй поршень 355, 355′ соединен непосредственно со вторым цилиндром 356, 356′, который соединен непосредственно с базовой частью 351 и им также можно управлять электрическим, гидравлическим или пневматическим способом. Базовая часть 351 в этом случае может поворачиваться (ось поворота не показана) относительно оси поршня 355, 355′. Если работает один или оба из первых цилиндров 352, 352′, базовую часть 351 можно ориентировать в любом требуемом направлении. Базовая часть 351 также содержит центрально расположенный сферический шарнир 357.
Такое же управление направлением осуществляется с использованием трех или четырех поршней в форме сильфона, как показано в варианте по фиг. 9. На этом чертеже показан активно-управляемое регулируемое механическое соединительное средство 360, в котором поршни 362, 362′, 362" управляются электрическим, гидравлическим или пневматическим способом, например, помощью крана (не показан) и, предпочтительно, непосредственно от двигателя устройства. Каждый поршень 362, 362′, 362" соединен с двигателем трехпутевым клапаном (не показан), один путь которого соединен с двигателем устройства, второй соединен с управляемым поршнем 362, 362′, 362", а третий путь является нормально закрытым боковым сбрасывающим отверстием. Когда двигатель включен, на поршни 362, 362′, 362" начинает действовать давление и клапан закрывается. Для регулирования направления устройства относительно спутника 20′, 20", ориентируя вектор тяги в требуемом направлении, третий клапан одного или более из поршней 362, 362′, 362" открывается на заданное время, выпуская немного газа и, следовательно, снижая давление, действующее на поршни. Это позволяет осуществить отвод поршней и, следовательно, поворот устройства. Как показано на фиг. 9, три поршня 362, 362′, 362" являются пневматическими и соединены с базовой частью 361, которая может находиться в контакте с устройством по настоящему изобретению или со спутником 20′, 20". Поршни 362, 362′, 362" могут быть расположены рядом с кромками базовой части 361 или в любом другом подходящем месте. Соединение с интерфейсной базовой частью 361 осуществляется с помощью сферического шарнира 363, который допускает относительный поворот между осью поршней 362, 362′, 362" и платформой. Как показано на фиг. 10, поршни 362, 362′, 362" управляются газом под давлением и имеют гибкий канал 365′, 365", который позволяет им вести себя как пружина, растягивающаяся и сжимающая в направлениях Δ, как показано двунаправленной стрелкой на фиг. 10. Такие гибкие каналы 365′, 365" хорошо известны в литературе. В настоящем варианте они запитываются либо от отдельного газогенератора, либо непосредственно от двигательного средства устройства по настоящему изобретению. При подаче давления канал 365′, 365" растягивается. Для управления относительным положением спутника и устройства по настоящему изобретению необходимо лишь немного сбросить давление из одного из цилиндров 362, 362′, 362" с помощью байпасного клапана 368 (фиг. 11 и 12). Газ можно сбрасывать вбок через четыре отверстия 366, 366′, 366", разнесенных на 90° друг от друга, чтобы не допустить каких-либо боковых импульсов. Альтернативно, газ можно сбрасывать продольно в направлении тяги двигательного средства, тем самым одновременно повышая его характеристики. Такой регулируемый сброс газа осуществляется через один из трех байпасных клапанов 368, как показано на фиг. 11 и 12. Сбрасывающий канал нормально закрыт (фиг. 11), тогда как канал между источником газа и гибким каналом нормально открыт (фиг. 11). Клапан 368 содержит поршень 367, вставленный в трубку 369, соединяющую гибкий канал 365′, 365" с базовой частью 361. Ход поршней 362, 362′, 362" ограничен двумя упорами 370′, 370". Газогенератор (который в описываемом варианте совпадает с камерой сгорания двигателя устройства по настоящему изобретению; альтернативно он может быть внешним газогенератором), нормально соединен с гибким каналом 365′, 365". Резиновые уплотнения 371, 371′, 371", 372, 372′, 372" вокруг боковых сбрасывающих каналов предотвращают любую утечку газа. Когда необходимо управляемо сбросить газ, основная трубка между газогенератором и гибким каналом 365′, 365" перекрывается (фиг. 12), с помощью клапана (не показан), например, электромагнитного клапана. Поршень 367 затем начинает двигаться, под электромагнитным или гидравлическим управлением, к нижнему упору, обозначенному позицией 370", тем самым открывая отверстие 373 сброса газа. Это позволяет выпустить газ из гибкого канала 365′, 365" в космос. Активное управление направлением такого типа может потребовать электронной системы "регистрации и обработки данных", чтобы реализовать управление с обратной связью например, в форме хорошо известной системы пропорционально-дифференциального регулирования. Применяемые датчики предпочтительно являются акселерометрами для регистрации угловых ускорений вокруг двух осей управления вектором тяги. Вышеописанные электронные компоненты, например, датчики и система управления, могут быть теми же, что применяются в средстве определения пространственного положения и в бортовом средстве управления, описываемыми ниже, и/или являться частью внутренней платформы. Эти электронные компоненты функционально соединены с бортовым средством управления устройства по настоящему изобретению, обеспечивая повышенную точность при окончательном позиционировании системы устройство-спутник во время возврата с орбиты, осуществляемого этим устройством. Такое средство также позволяет снизить потери, вызванные угловой ошибкой вектора тяги, когда функционирует двигательное средство устройства по настоящему изобретению.
В другом варианте осуществления средство для уменьшения угловой ошибки вектора тяги применяется, если положение устройства относительно спутника 20′, 20", с которым оно соединено, фиксируется до запуска и, к тому времени, когда принимается решение о возврате спутника 20′, 20" с орбиты или о переводе его на парковочную орбиту, потери полезного импульса из-за угловой ошибки вектора тяги становятся чрезмерными. Эти потери зависят от размера и средней плотности спутника 20′, 20", а также от целесообразности получения постоянного или переменного центра масс, как бывает в случае наличия подвижных частей, таких, как раскрываемые солнечные панели или при достаточном расходе топлива, вызывающем изменение массы. Потери из-за угловой ошибки вектора тяги уменьшаются априори за счет такой конструкции устройства, которая обеспечивает очень короткое время горения, высокую скорость горения твердого топлива и имеет большой диаметр шейки сопла, как было описано выше. Средство уменьшения может, например, осуществлять стабилизирующее вращение вокруг оси крена с помощью небольших вспомогательных ракет, смещенных от центра относительно сопла в задней части устройства. После воспламенения эти ракеты генерируют момент, направленный вдоль оси тангажа или оси рыскания, в зависимости от их положения.
На фиг. 13 и 14 показан вариант осуществления устройства 40 по настоящему изобретению, дополненный средством для уменьшения любой угловой ошибки вектора тяги. Этот вариант уменьшает угловую ошибку вектора тяги путем стабилизации спутника с помощью вращения вокруг оси крена, создаваемого двумя небольшими одноразовыми вспомогательными ракетами 410′, 410", которые включаются блоком безопасности и воспламенения (не показан) на устройстве 40. Ракеты 410′, 410" имеют небольшой размер и при включении они генерируют движение вокруг оси крена со скоростью крена, которая зависит от времени горения ракет и величины тяги. Ракеты 410′, 410" предпочтительно включаются перед воспламенением устройства 40, через кабель или радиосигналом, посылаемым блоком безопасности и воспламенения в устройстве 40. Сопла 411′, 411" ракет 410′, 410" развернуты на 90° к направлению полета для создания крутящего момента, направленного вокруг оси крена спутника 20′, 20". Когда они воспламеняются, они создают момент, который заставляет устройство 40, а, следовательно, и спутник 20′, 20", вращаться вокруг оси крена. Затем воспламеняется устройство 40. Вращение спутника 20′, 20" уменьшает влияние любой угловой ошибки вектора тяги, поскольку компонент тяги, перпендикулярный направлению полета претерпевает прецессионное движение. Если период прецессии больше, чем общее время работы удаляющего с орбиты устройства 40, чистый эффект угловой ошибки будет невелик. Если угловое движение, созданное вращением, существенно, т.е., угловая скорость, созданная ракетами 410′, 410" достаточно высока, угловая ошибка вектора тяги будет находиться на приемлемом уровне.
Другой вариант средства для уменьшения угловой ошибки вектора тяги показан на фиг. 15. Устройство 50 оснащено небольшими одноразовыми вспомогательными ракетами 510′, аналогичными ранее описанным ракетам 410′, 410". Кроме того, дополнительно имеются ракеты 512, 512′, 512", аналогичные ракетам 510′, 510" и смещенные относительно центра сопла 518 устройства 50, т.е., за соплом. Когда эти ракеты 512, 512′, 512" воспламеняются, они генерируют момент тангажа или рыскания, в зависимости от их положения.
Ракеты, описанные со ссылками на фиг. 13, 14 и 15 выполнены в форме заряда твердого топлива. В частности, они являются одноразовыми, одноимпульсными, и заправлены твердым топливом. Они могут иметься в большем количестве и предпочтительно, они расположены попарно на каждой оси. Эти ранее описанные ракеты 410′, 410", 510′, 510", 512, 512′, 512" просты в изготовлении, имеют небольшие размеры и могут работать под непосредственным управлением бортового средства управления устройства 40, 50 по настоящему изобретению. Расположенные на расстоянии от оси сопла 418, 518 устройства 40, 50 они создают низкий уровень тяги. Такая тяга, тем не менее, генерирует больший момент вокруг осей тангажа и рыскания, чем момент, возникающий из-за угловой ошибки вектора тяги. Ракеты 410′, 410", 510′, 510", 512, 512′, 512" могут быть прикреплены к наружным стенкам устройства 40, 50, или они могут быть отнесены дальше от сопел 418, 518 на штанге или балке (не показаны). Если устройство 40, 50 обнаруживает угловое ускорение вокруг осей тангажа или рыскания (с помощью приборов для обнаружения ускорений, описанных ниже), оно воспламеняет соответствующую ракету для создания тяги в противоположном направлении. Система выполнена так, чтобы ракета создавала "балансирующий" эффект и воспламенялась с задержкой, которая учитывает угловое ускорение, вызванное угловой ошибкой вектора тяги и максимальную потенциальную задержку воспламенения ракеты. Созданная в результате тяга приводит к ускорению, которое достаточно для восстановления направления вектора тяги на изначально заданном направлении. Поскольку общее время работы устройства 40, 50 очень ограничено, время работы и тягу одноразовых вспомогательных балансировочных ракет рассчитывают так, чтобы не допустить чрезмерной реакции. В случае ошибки можно воспламенить ракету, противоположную использованной, чтобы создать еще одну тягу, направленную в противоположную сторону. Таким образом, угловую ошибку вектора тяги можно корректировать с помощью ракет, установленных в контакте с корпусом для создания стабилизирующего вращения, и рядом с соплом для балансировки, или используя только одно из этих двух решений.
В еще одном варианте осуществления (не показан), определенном как "независимый", устройство по настоящему изобретению генерирует включающий и воспламеняющий сигналы самостоятельно, без какой-либо помощи от наземной станции или станций в космосе. Такой вариант может быть создан на основе одного из вышеописанных вариантов и/или из частей. Однако он отличается от них другими функциями бортового средства управления устройства, поскольку средство приема управляющих сигналов не принимает сигналов на воспламенение, и эти сигналы генерируются самим устройством независимо, в заранее заданный момент времени или по заранее определенным условиям.
Устройство по настоящему изобретению функционирует независимо от спутника 20′, 20" и назначением этого средства приема сигналов является не прием сигналов, относящихся к включению и/или воспламенению устройства от наземных станций или других космических аппаратов, а лишь прием сигналов для остановки независимой последовательности операций устройства, как более подробно будет описано ниже. Можно предусмотреть, чтобы такое средство приема управляющих сигналов имело возможность принимать сигналы от внешних передатчиков для прерывания процедуры воспламенения и включения последующего удаленного управления ею. В таком варианте бортовое средство управления содержит средство для передачи управляющих сигналов, которые были заранее запрограммированы или рассчитаны бортовым средством управления и для передачи их на средство приема управляющих сигналов. Это средство приема управляющих сигналов, соединенное с двигательным средством, затем выполняет включение и воспламенение устройства 10, тем самым включая воспламенитель независимо.
Средство передачи управляющих сигналов выполнено в форме электронных контроллеров и, предпочтительно, содержит таймер включения воспламенения, отрегулированный так, чтобы соответствовать сроку службы спутника 20′, 20" или длительности миссии. Альтернативно, синхронизацию процедуры возврата с орбиты можно рассчитывать с помощью бортового средства управления при приеме предупреждающего сигнала от датчиков, факультативно установленных на устройстве по настоящему изобретению, как описано ниже.
В другом варианте осуществления (не показан) именуемом "полунезависимым", устройство по настоящему изобретению принимает сигнал включения от наземной станции или другого космического аппарата, находящегося в космосе. Следовательно, этот вариант имеет структурную конфигурацию и компоненты, аналогичные устройству 10, описанному в первом варианте, за исключением того, что сигнал на воспламенение генерируется независимо самим устройством по настоящему изобретению. Описываемый вариант также имеет средство для передачи управляющих сигналов, как описано и реализовано в предыдущем варианте. Это средство для передачи управляющих сигналов отправляет на средство приема управляющих сигналов сигнал воспламенения, генерируемый бортовым средством управления после приема сигнала на включение от наземной станции или другого космического аппарата, находящегося в космосе.
Все проиллюстрированные и описанные варианты осуществления также могут содержать факультативное средство для повышения функциональных характеристик устройства по настоящему изобретению и системы, полученной за счет его соединения со спутником 20′, 20", и для добавления новых функций. Один вариант дополнительных функций устройства по настоящему изобретению в одном или более из описанных выше вариантов заключается в описанном выше средстве телекоммуникаций, которое также позволяет вести обмен командами и сигналами со спутником 20′, 20", к которому прикреплено устройство, хотя устройство остается полностью независимым от спутника.
В одном или более из описываемых вариантов осуществления устройство по настоящему изобретению предпочтительно также содержит первое средство обнаружения, функционально соединенное с бортовым средством управления для обнаружения других объектов, попадающих в заранее определенную зону безопасности вокруг устройства и/или спутника 20′, 20", с которым он соединен. Еще более предпочтительно, устройство по настоящему изобретению содержит средство для связи со спутником 20′, с которым оно соединено, для обнаружения любых ударных повреждений спутника. Устройство предпочтительно также содержит третье средство обнаружения, функционально соединенное с бортовым средством управления, для обнаружения неисправностей спутника 20′, 20" с помощью средства связи с ним.
Устройство по настоящему изобретению также содержит второе средство обнаружения, функционально соединенное с бортовым средством управления, для обнаружения ударных повреждений самого устройства.
В одном или более из описываемых или показанных вариантов осуществления и в комбинации с одной или более из технических реализаций устройство по настоящему изобретению может дополнительно содержать четвертое средство обнаружения, функционально соединенное с бортовым средством управления, предназначенное для определения ориентации во времени и/или орбиты устройства по настоящему изобретению в произвольный момент времени или в заранее заданные моменты времени, или для определения положения в космосе устройства по настоящему изобретению. Это четвертое средство обнаружения предпочтительно функционально соединено с блоком ориентации и мониторинга положения, также используемым для независимого определения положения и ориентации устройства и спутника 20′, 20", с которым оно соединено. Этот блок применяется для повышения точности расчета ориентации и положения системы для уменьшения ошибок при расчете траектории входа в атмосферу. Другим назначением этого блока является отправка команд на средство уменьшения угловой ошибки вектора тяги и/или на средство активного управления вектором тяги на регулируемом механическом соединительном средстве. Этот блок защищен от электромагнитных помех и радиации, встречающейся в космосе.
Эти датчики предпочтительно функционально соединены со средством мониторинга состояния. Они собирают результаты электрических тестов, приходящие от средств, установленных на устройстве по настоящему изобретению, а также сигналы, приходящие от ранее описанных датчиков мониторинга. Собранные данные отправляются по запросу или с регулярными интервалами на управляющий интерфейс, расположенный на наземной станции или на другом космическом аппарате, используя телекоммуникационное средство, которым оснащено устройство. Альтернативно, устройство по настоящему изобретению может отправлять эти данные на спутник 20′, 20", с которым оно соединено, используя средство связи спутника. Такая связь также может быть двунаправленной, чтобы спутник 20′, 20" мог отправлять управляющие сигналы на устройство.
На фиг. 13 и 15 показан вариант с двумя средствами 492′, 492", 592 ящиков в форме контейнеров, имеющих форму параллелепипеда, которые соединены с головной частью корпуса устройства 40, 50. Эти средства контейнеров предпочтительно содержат средство источника электропитания (например, неперезаряжаемые батареи), бортовое средство управления и телекоммуникационное средство, описанные выше. Эти средства 492′, 492", 592 контейнеров также могут содержать средство мониторинга состояния и средство для активного управления тягой, а также любые дополнительные средства для определения пространственного положения и управления пространственным положением, и средство для уменьшения угловой ошибки вектора тяги. Эти средства 492′, 492", 592 контейнеров могут быть расположены либо в конечном положении корпуса устройства, либо в хвосте, рядом с соплом.
В еще одном варианте осуществления (не показан) устройство может содержать систему для позиционирования спутника с котором оно соединено (или систему аварийного прекращения беспорядочного вращения), чтобы обеспечить соответствие и стабильность пространственного положения спутника перед тем, как произойдет воспламенение устройства. Эта система может оказаться необходимой, если пространственное положение спутника вышло из-под контроля или если пространственное положение спутника таково, что направление тяги, генерируемой устройством, не совпадает с вектором орбитальной скорости, и дальнейшие маневры спутника невозможны. Эта система запитывается одним или более картриджем газогенератора, заряженного твердым топливом, воспламеняемым электрическим детонатором (с добавлением, при необходимости, соответствующей пиротехнической смеси), и функционально соединена с бортовым средством управления, которое управляет воспламенением устройства.
В своих различных возможных вариантах устройство по настоящему изобретению применяется для предотвращения дальнейшего накопления мусора на орбите и риска для людей и имущества, возникающего при неуправляемом входе в атмосферу на Землю спутников, космических аппаратов или их частей.
В частности, устройство 10 выполнено с возможностью изменять траекторию спутника 20′, 20", с которым оно соединено, когда этот спутник завершает срок своей службы или в нем возникает неисправность. Как показано на фиг. 1, такое изменение траектории позволяет спутнику спуститься непосредственно на Землю 1, где он разрушается при движении в атмосфере, или может приземлиться в произвольно выбранной области или в заранее определенных границах. Процедура возврата может включать этап перенаправления спутника к безопасной области в космосе, определенной как "кладбище" или парковочная орбита. Как показано на фиг. 1, если орбита спутника 20′ является низкой 2 и изменение траектории состоит в возврате к небесному телу в центре 1, или на более низкую орбиту, устройство 10 генерирует тягу, направленную в сторону, частично или полностью противоположную вектору орбитальной скорости (в направлении полета) спутника 20′. С другой стороны, если орбита спутника 20" является высокой 3, то изменение траектории заключается в переводе спутника 20" на парковочную орбиту или на кладбище 4, расположенное еще дальше от планеты Земля 1. В этом случае тяга, генерируемая устройством 10 будет направлена в ту же сторону, что и вектор орбитальной скорости. Для обоих типов процедуры изменения орбиты спутник 20′, 20" будет двигаться по особой траектории, чтобы не создавать риска другим спутникам или космическим аппаратам, людям и имуществу, как на Земле, так и в космосе.
Устройство 10 устанавливают на спутнике 20′, 20" до его запуска. Такая сборка осуществляется до запуска с помощью средства 310 для механического соединения устройства 10 со спутником 20′, 20", орбиту которого нужно будет изменить. В частности, устройство 10 можно соединить с передней частью спутника 20′, если его нужно спустить с орбиты 2 к Земле 1; либо устройство 10 можно установить за спутником 20", если его необходимо перевести с высокой орбиты 3 на парковочную орбиту 4.
Механическое соединение устройства со спутником 20′, 20" не влечет какой-либо зависимости от него. Фактически устройство по настоящему изобретению может работать независимо или полу-независимо, либо оно может управляться удаленно.
Твердотопливное двигательное средство создает импульс, необходимый для перевода спутника 20′, 20" с его рабочей орбиты, тогда как фиксированная или регулируемая механическая соединительная платформа (которая регулируется перед запуском и, затем, пассивно или активно, поскольку она находится под управлением с обратной связью во время работы реактивного двигателя) позволяет при необходимости управлять направлением тяги, генерируемой двигательным средством.
Устройство может работать в трех разных режимах: в режиме с удаленным управлением, в независимом режиме и в полу-независимом режиме. Все три режима осуществляют операции возврата с орбиты или изменения орбиты всего за несколько этапов, на которых:
- рассчитывают с помощью бортового средства управления или описываемого устройства требуемую новую космическую орбиту или требуемую траекторию, приводящую к падению на Землю, соответственно;
- рассчитывают с помощью бортового средства управления или описываемого устройства момент активации перемещающего/возвращающего устройства для попадания на новую орбиту или траекторию на основе фактической орбиты спутника;
- отправляют от средства удаленного управления на перемещающее/возвращающее устройство управляющий сигнал или само устройство запускает процедуру возврата с орбиты или изменения орбиты для перемещения спутника на новую расчетную орбиту или траекторию;
- воспламеняют двигательное средство перемещающего/ возвращающего устройства в расчетный момент времени, при приеме управляющего сигнала.
В предпочтительном режиме работы устройство по настоящему изобретению находится под удаленным управлением. Как показано на диаграмме последовательности на фиг. 17, процедура управления, необходимая для выполнения устройством 10 возврата с орбиты или изменения орбиты направляется средством удаленного управления, которое в простейшем случае является наземной станцией управления.
На протяжении срока службы спутника 20′ устройство 10 остается в состоянии ОЖИДАНИЕ, пока оно не примет сигнал от наземной станции 100, являющейся средством удаленного управления. Когда оно примет этот сигнал бортовое средство управления осуществляет проверку состояния блока безопасности и воспламенения (если он имеется). Если имеется статус СТАРТ, это значит, что система включена и процедура воспламенения устройства 10 начинается в момент, определяемый принятым сигналом и спутник возвращается с орбиты или переводится на другую орбиту безопасным и управляемым способом, т.е., переводится на специально рассчитанную орбиту входа в атмосферу. Если этот статус иной, например, вследствие случайного сигнала или если устройство 10 еще не включено, то сигнал на воспламенение игнорируется и устройство 10 возвращается в состояние ОЖИДАНИЕ. Отправка сигнала безопасности от средства удаленного управления на средство приема управляющих сигналов перемещающего/возвращающего устройства позволяет переключить устройство в рабочее состояние до отправки управляющего сигнала на перемещение спутника на расчетную новую орбиту или траекторию. Такие сигналы могут быть шифрованными для защиты передачи и предотвращения взлома и несанкционированного воспламенения. Как показано на фиг. 16, когда принимается решение о возврате с орбиты спутника 20′, на устройство 10 с наземной станции 100 и/или с другого космического аппарата отправляется последовательность сигналов. Эти сигналы принимает средство приема управляющих сигналов, функционально соединенное с бортовым средством управления устройства 10. Приняв эту последовательность сигналов, бортовое средство управления включает блок безопасности и воспламенения, который в свою очередь включает воспламенитель 216, который воспламеняет реактивный двигатель малой тяги. В частности, предпочтительно применяют высоковольтный воспламенитель. Блок безопасности и воспламенения, включенный сигналом включения, заряжает конденсатор, пока он не достигнет характеристики высоковольтного состояния включенного режима. Когда конденсатор внезапно разряжается в результате последующего независимого сигнала воспламенения, металлический проводящий слой на мембране испаряется из-за высоковольтного тока, и пластиковая мембрана отбрасывается с высокой скоростью к главному слою взрывчатого вещества, воспламеняя его.
Альтернативно, устройство 10 может быть оснащено низковольтным воспламенителем. В этом случае электрический провод воспламенителя нагревается и испаряется по действием тока (типично, несколько ампер при небольшом напряжении в течении нескольких миллисекунд), который представляет сигнал воспламенения. Это приводит к воспламенению пиротехнической смеси, находящейся в воспламенителе. Затем из капсулы выходят продукты горения и направляются к основному заряду воспламенителя и, в результате, поджигают твердое топливо 212 реактивного двигателя малой тяги. Это создает тягу, достаточную для перевода спутника 20′ на нужную орбиту входа в атмосферу так, чтобы он приземлился или разрушился в атмосфере. Альтернативно, тяги устройства достаточно, чтобы перевести систему устройство-спутник на заранее рассчитанную безопасную орбиту, например, на "кладбище" или парковочную орбиту 4. В этом предпочтительном режиме работы допустимое окно изменения орбиты рассчитывается наземной станцией 100. Альтернативно оно может рассчитываться другим космическим аппаратом. Допустимое окно изменения орбиты учитывает положение системы устройство-спутник, когда принимается решение приступить к изменению орбиты. Расчет допустимого окна изменения орбиты также учитывает другие объекты, находящиеся в космосе, такие как другие спутники, космические аппараты или мусор, чтобы не допустить перехода системы устройство-спутник на траекторию, которая приведет к столкновению с любыми такими объектами. Последовательность сигналов, посылаемых наземной станцией 100, таким образом, состоит из по меньшей мере одного сигнала включения и, затем, по меньшей мере одного сигнала воспламенения, которые отправляются после принятия решения об изменении орбиты и когда имеется допустимое окно. Такая орбитальная траектория рассчитывается с учетом орбитального положения и ориентации устройства в момент, когда должно произойти изменение орбиты, возможно с использованием четвертых датчиков, если они имеются. Диаграмма последовательности на фиг. 18 расширяет количество операций, показанных на фиг. 17. После приема сигнала и проверки, что статус блока безопасности и воспламенения является статусом СТОП, устройство отправляет сигнал тревоги на наземную станцию 100, чтобы предупредить о попытке воспламенить устройство 10, и о том, что условия, необходимые для выполнения этой операции не выполнены. В следующей диаграмме последовательности на фиг. 19 количество операций, выполняемых или требуемых во время периода, когда работает устройство, еще более расширено. Для уменьшения любых рисков неисправности блока безопасности и воспламенения, если после получения от наземной станции 100 команды на начало процедур воспламенения его статус определяется как СТОП, то наземная станция 100 отправляет дополнительный запрос на подтверждение сигнала. Наконец, устройство 10 может содержать систему мониторинга своего статуса с помощью описанных выше средств и датчиков, и собранные данные могут отправляться на наземную станцию 100, как схематически показано на фиг. 20, либо с регулярными интервалами, либо по запросу.
Во втором режиме работы устройство является автономным, т.е. оно не управляется ни наземной станцией 100, ни другим космическим аппаратом, ни каким-либо другим средством удаленного управления. Устройство 40 независимо генерирует последовательность воспламенения путем отправки управляющих сигналов с помощью бортового средства управления спустя заранее заданное время. Этот временной интервал обычно соответствует полезному сроку службы спутника 20′, 20", с которым соединено это устройство, или длительности миссии. Альтернативно, вместо предварительного задания это время может зависеть от превышения пороговых величин и сигналов тревоги, посылаемых датчиками. Эти пороговые величины могут превышаться, например, в результате серьезной неисправности, удара (механического удара, обнаруживаемого акселерометром), или неизбежного столкновения с другим объектом на орбите (обнаруженным радарной системой на наземной станции или датчиками приближения бортового средства управления, если они имеются). Во втором режиме работы бортовое средство управления, таким образом, независимо генерирует по меньшей мере сигнал включения и по меньшей мере сигнал воспламенения. В этом режиме работы предусмотрено, что наземная станция или другой космический аппарат имеет возможность остановить процедуру воспламенения, послав на устройство сигнал СТОП, который принимается средством приема управляющих сигналов устройства. Кроме того, эта наземная станция или другой космический аппарат могут перепланировать последовательность воспламенения, посылая управляющие сигналы, как описано выше для предыдущего предпочтительного режима работы. Для независимо-управляемого безопасного возврата с орбиты в этом втором режиме работы устройство 40 должно быть способно определять собственное положение и ориентацию и рассчитывать безопасную траекторию входа в атмосферу или перехода на парковочную орбиту, т.е., устройство должно быть оснащено блоком ориентации и позиционирования. Более того, устройство должно быть способно оценивать допустимое окно схода с орбиты относительно других объектов, находящихся в космосе, которые могут встретиться вдоль его траектории, как описано выше.
Третий режим работы относится к полу-независимой работе устройства. В этом режиме работы часть управляющих сигналов генерируется независимо самим устройством с помощью его бортового средства управления. В частности, с помощью средства передачи управляющих сигналов устройство генерирует сигналы, применяемые для включения устройства. После включения, от наземной или космической станции или от другого космического аппарата отправляется сигнал воспламенения. В частности, сигналы воспламенения могут также отправляться спутником, который нужно спустить с орбиты или перевести на другую орбиту в вариантах с оперативным соединением для обмена данными между спутником и устройством.
Согласно одному варианту осуществления (не показан) перед воспламенением устройства, если пространственное положение спутника вышло из-под контроля (например, из-за неисправности системы управления пространственным положением), система позиционирования спутника уменьшает угловую скорость тангажа и рыскания до пренебрежимо малых величин и выравнивает направление тяги, генерируемой устройством, с вектором орбитальной скорости. Если даже при активном управлении пространственным положением спутника углы тангажа и рыскания достаточны для появления углового рассогласования между направлением тяги и вектором орбитальной скорости, и спутник не может изменить свое пространственное положение для устранения такого рассогласования, система позиционирования спутника может выполнить действия на самом устройстве для восстановления необходимого пространственного положения спутника, позволяя устройству генерировать тягу в требуемом направлении. Происходит воспламенение картриджей, установленных в системе в одной или более из полостей, соединенных с двумя парами сопел, что позволяет выполнять маневры поворота вокруг осей тангажа и рыскания. Каждая полость для картриджей отделена от пары сопел соответствующими клапанами. Эти клапаны могут быть электромагнитными, и могут открываться и закрываться путем регулирования тока в катушке, однако можно применять клапаны и любого другого типа, при условии, что они могут быть приведены в действие достаточно быстро. Когда воспламеняется единственный картридж его горение происходит внутри одной из полостей. При закрытом клапане давление газа, генерируемое внутри полости, повышается, пока картридж горит. Когда клапан открывается газ под давлением стремится вытечь из полости в сопло. Диаметры клапана, соединительной трубки, ведущей к соплу, и шейки сопла имеют такие размеры, чтобы гарантировать расширение газа и его выход через отверстие в сопле со сверхзвуковой скоростью, тем самым генерируя необходимую тягу. Сопла расположены на подходящем расстоянии от осей тангажа и рыскания, поэтому необходимый момент генерируется вдоль каждой из этих осей, после того, как газ был выпущен через единственное сопло. Воспламенением единственного картриджа управляет бортовое средство управления. Открыванием и закрыванием клапанов управляет система управления с обратной связью, которая использует величины углов пространственного положения, выдаваемые в реальном масштабе времени средством определения пространственного положения и/или управления пространственным положением. Это средство функционально соединено с системой позиционирования спутника и работает, пока не будет достигнуто требуемое пространственное положение. Картриджи твердого топлива имеют такой размер, чтобы генерировать газ под достаточным давлением и в течение достаточного времени, чтобы можно было достичь требуемого пространственного положения, начиная с любого начального состояния в терминах углов и угловых скоростей. Кроме того, для активной коррекции угловой ошибки вектора тяги можно использовать систему позиционирования спутника.
Устройство по настоящему изобретению работает без поддержки со стороны спутника, с которым оно соединено и орбиту которого следует изменить. Устройство может осуществлять связь непосредственно с другим космическим аппаратом или орбитальной станцией или с наземной станцией. Наземная станция может отправлять команды на включение и воспламенение устройства, или запрашивать данные о состоянии системы устройство-спутник и (если эта функция реализована) данные о состоянии только спутника. Преимущество устройства по настоящему изобретению заключается в его способности осуществлять маневры изменения орбиты небольшим количеством простых этапов.
Устройство по настоящему изобретению, таким образом, позволяет соответствующим образом избавляться от спутника, с которым оно соединено по окончании миссии этого спутника. В частности, такое избавление заключается путем увода спутника с его рабочей орбиты или путем возврата спутника на Землю.
Одно преимущество устройства по настоящему изобретению относится к его способности освобождать орбиту, ранее занимаемую спутником, не создавая помех другим спутникам или космическим аппаратам, расположенным рядом, что является важным преимуществом, особенно для геостационарных и геосинхронных орбит.
Другим преимуществом устройства по настоящему изобретению является то, что оно осуществляет безопасный и управляемый вход в атмосферу спутника, снимаемого с орбиты, не допуская столкновений и ущерба и предотвращая ущерб людям и имуществу на Земле, или другим космическим аппаратам, находящимся поблизости.
Устройство для возврата с орбиты или изменения орбиты по настоящему изобретению обладает преимуществом, которое заключается в возможности убирать неисправные спутники, с которыми такие устройства соединены, и которые не имеют другой возможности войти в атмосферу. Если на спутнике во время его работы возникнут серьезные неисправности устройство по настоящему изобретению позволяет перевести неисправный спутника на парковочную орбиту или вернуть его в земную атмосферу, уменьшая риск его столкновения с другими работающими спутниками.
Устройство по настоящему изобретению преимущественно устраняет риск случайного столкновения спутника с другими известными объектами во время их рабочего цикла на орбите. Если оно соединено с датчиком приближения (например, радаром), устройство позволяет избежать столкновения с любыми, даже ранее неизвестными объектами, если они приблизятся на определенное расстояние к соответствующему спутнику.
Устройство по настоящему изобретению можно преимущественно применять для предотвращения умышленных или (или неумышленных) деструктивных действий или других угрожающих операций, включая умышленное уничтожение спутника, космического аппарата или орбитальной ступени с помощью, например, намеренного столкновения или других действий, которые могут повысить риск столкновения с другими объектами в космосе.
Устройство можно применять в любое время для изменения орбиты спутника, с которым оно соединено, или как резервное устройство в случае неисправности двигательного средства спутника, после того как он запущен. Если двигатель последней ступени окажется дефектным, устройство можно использовать как резервную двигательную систему, позволяющую спутнику достичь запланированной орбиты или резервной орбиты для завершения всей запланированной миссии или ее части.
Устройство по настоящему изобретению, таким образом позволяет осуществлять автоматическое изменение орбиты космического аппарата просто за счет предварительного программирования самого устройства или принимая по меньшей мере одну команду удаленного управления от наземной станции и безо всяких ограничений. Те же управляющие команды может отправлять посредством другого находящегося в космосе космического аппарата или даже спутника, орбиту которого нужно изменить и с которым механически соединено это устройство.
Устройство по настоящему изобретению преимущественно позволяет снимать спутник с орбиты для возврата в заранее определенное безопасное место на Земле, удаленное от населенных или плотно застроенных регионов.
Конструкция устройства обеспечивает продолжительность его службы, превышающую продолжительность миссии спутника, с которым оно соединено и, в крайнем случае, его можно использовать как резервную систему для продления времени миссии спутника на 20 - 80%, в случае неисправности двигательной системы спутника во время его запуска.
Наконец, модульная конструкция устройства по настоящему изобретению позволяет его адаптировать к требованиям изменения орбиты спутника, с которым устройство соединено.
Кроме того, способ по настоящему изобретению позволяет выполнить возврат с орбиты или изменение орбиты с помощью присоединенного автономного устройства.
Способ позволяет безопасно и управляемо возвращать с орбиты спутник или изменять орбиту спутника, заранее рассчитывая безопасную область падения на Земле или новую орбиту в космосе.
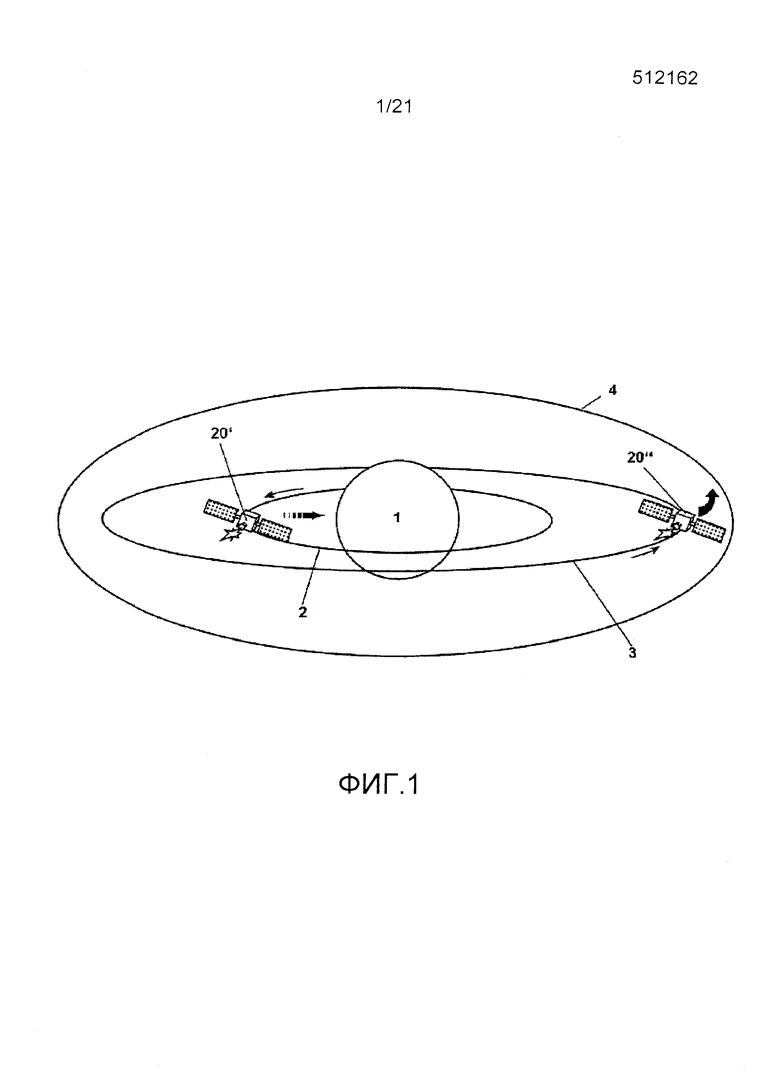
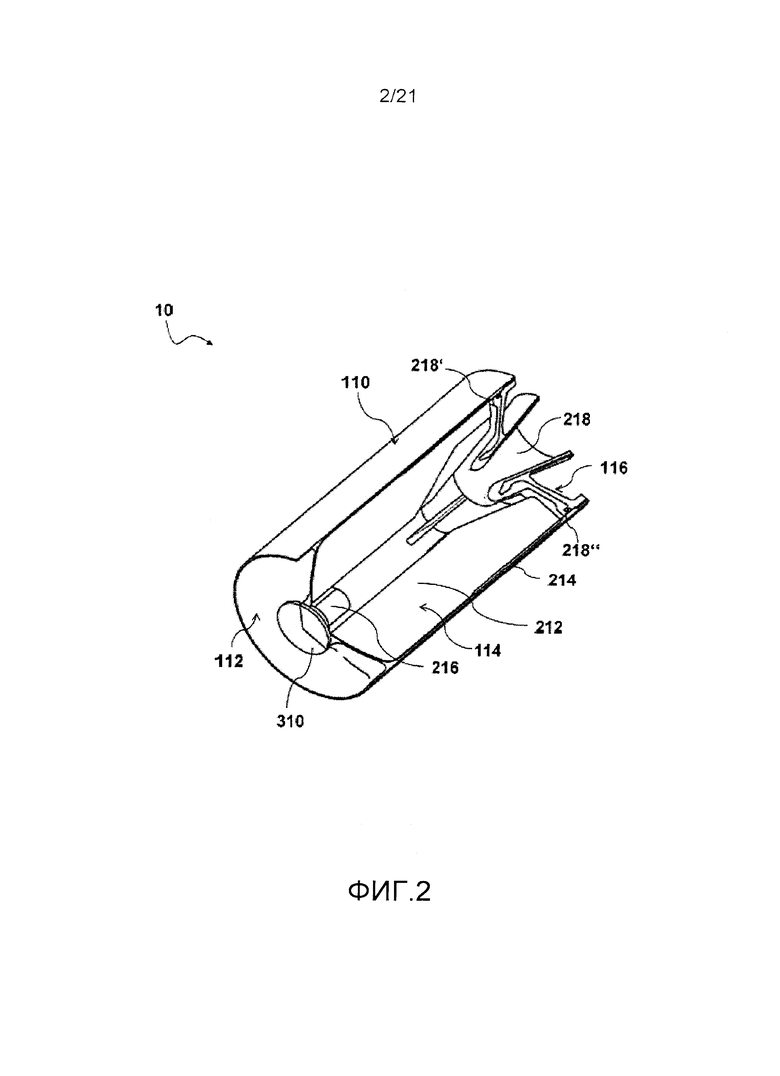
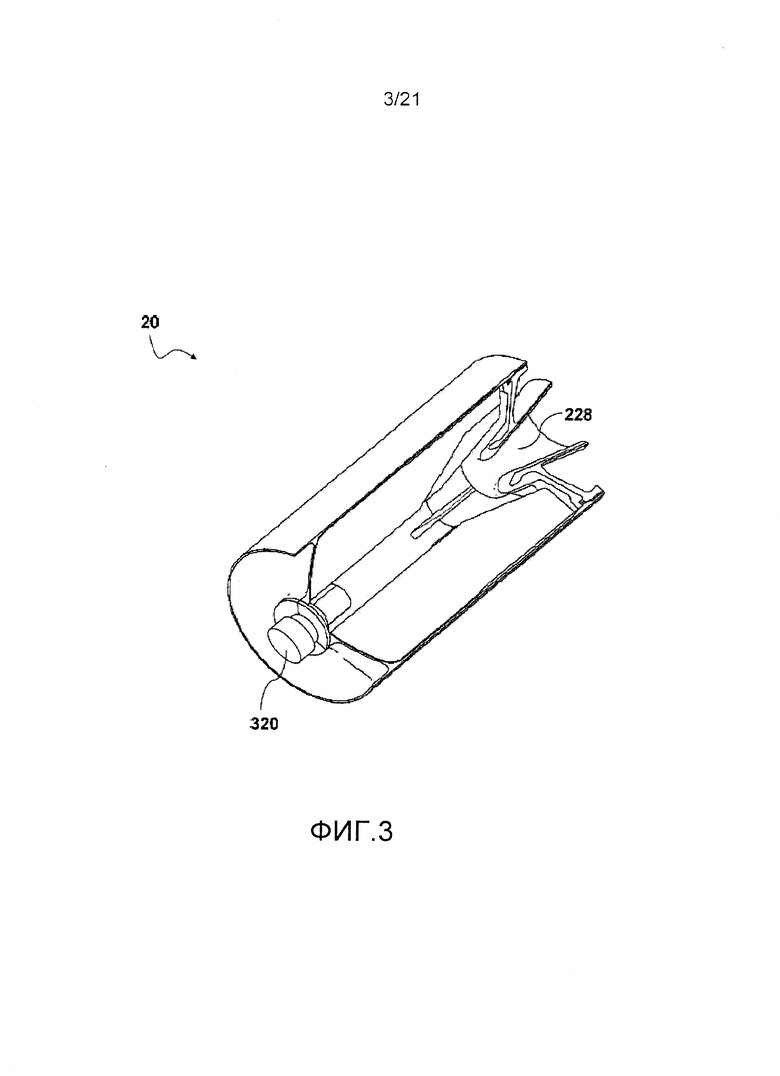
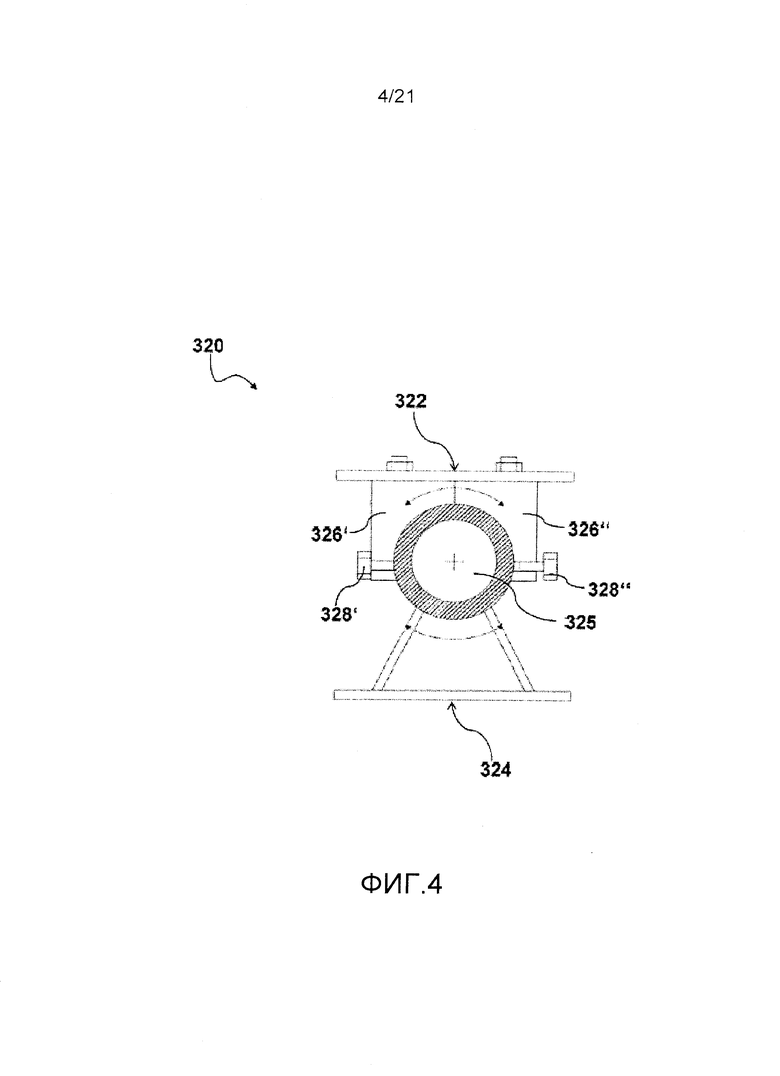
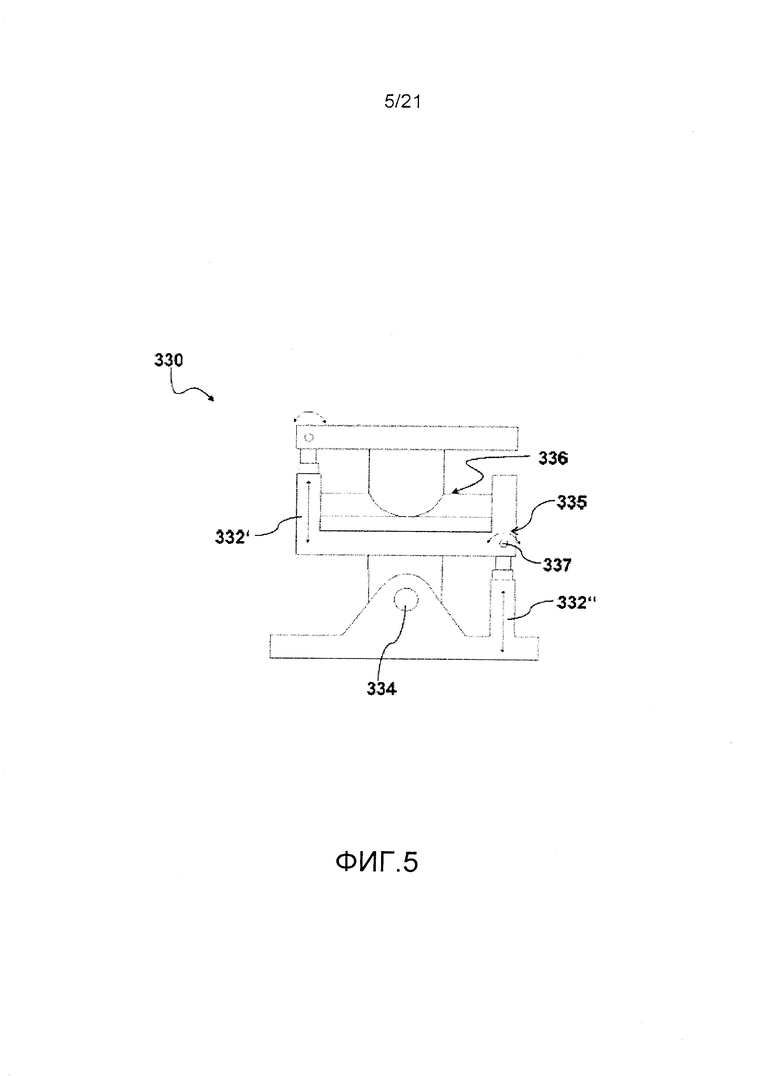
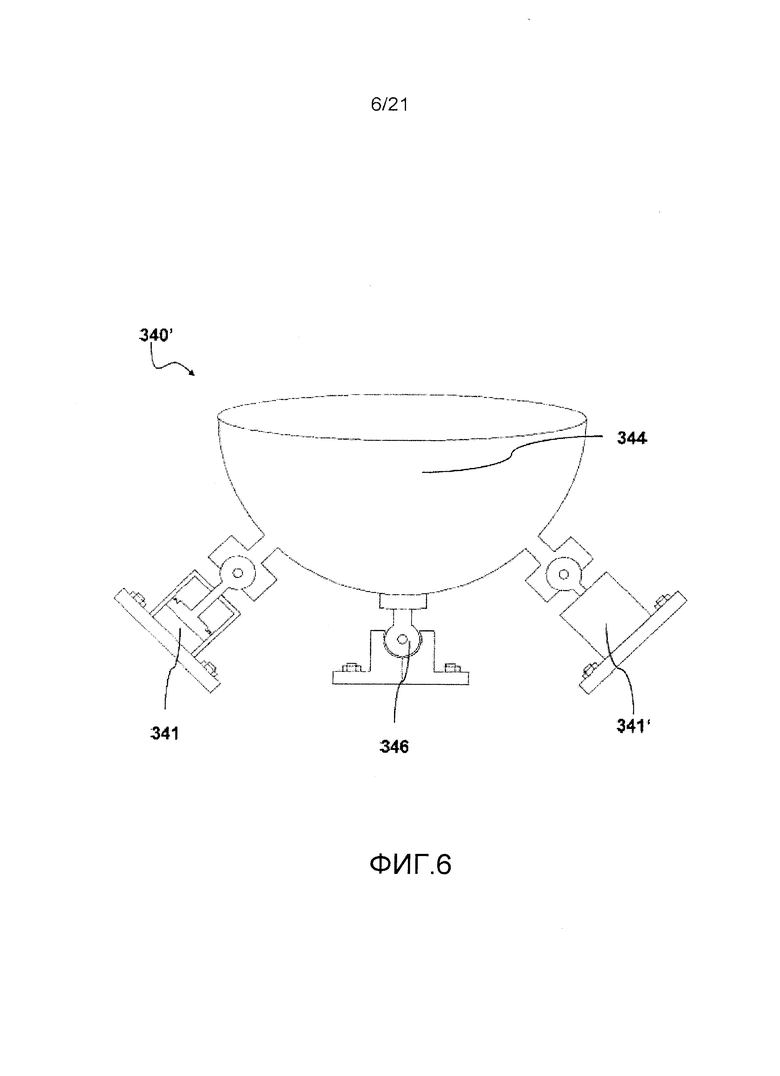

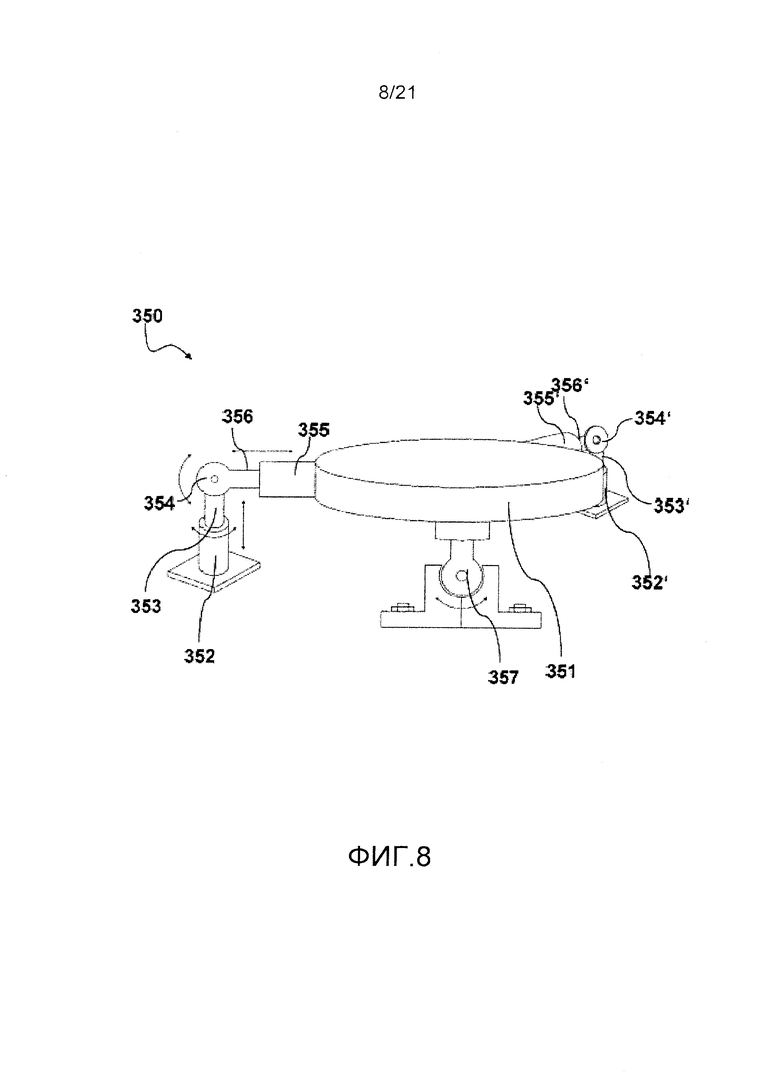
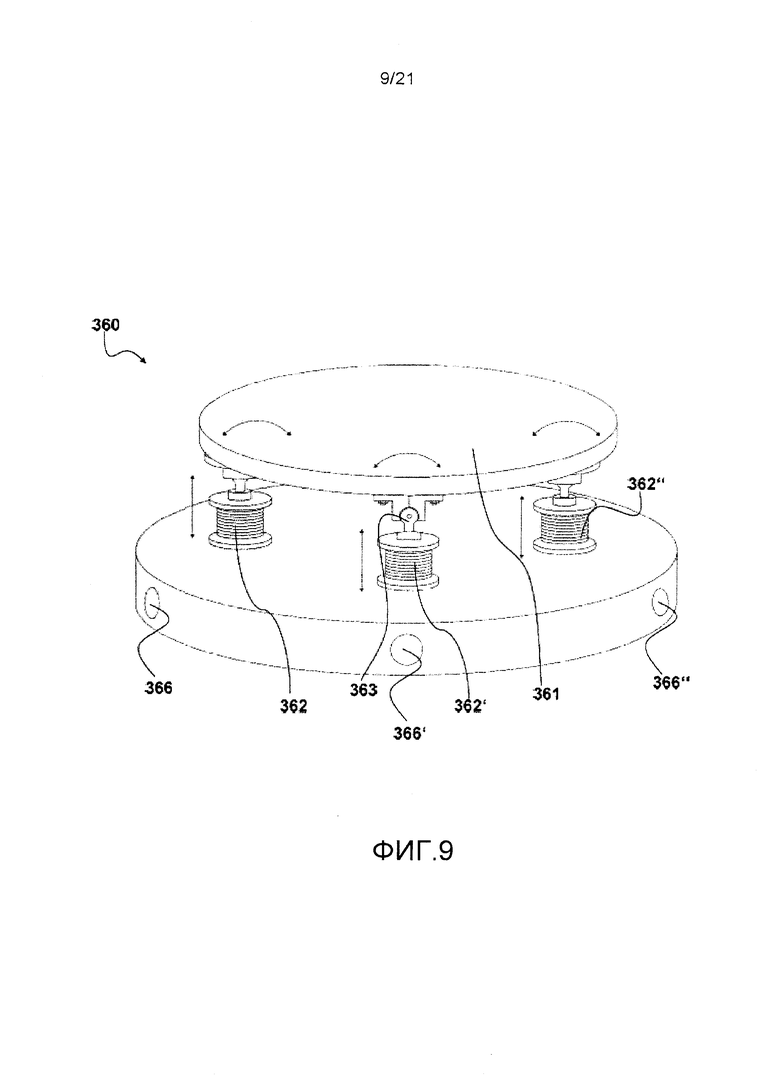

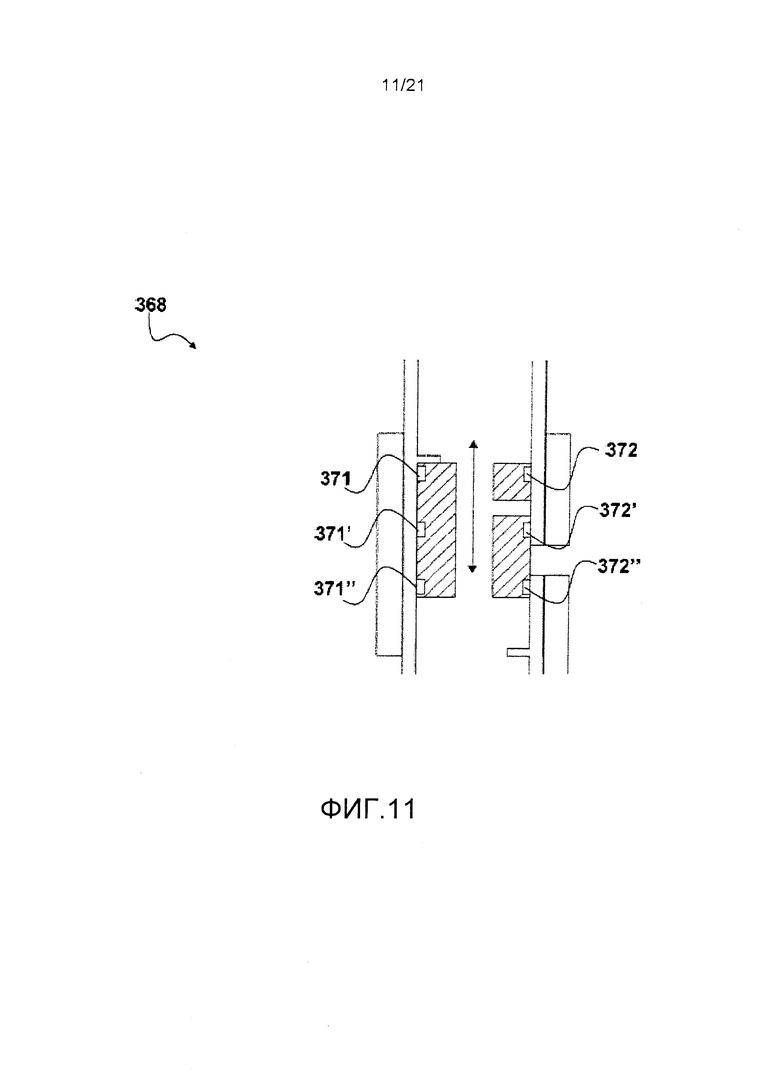
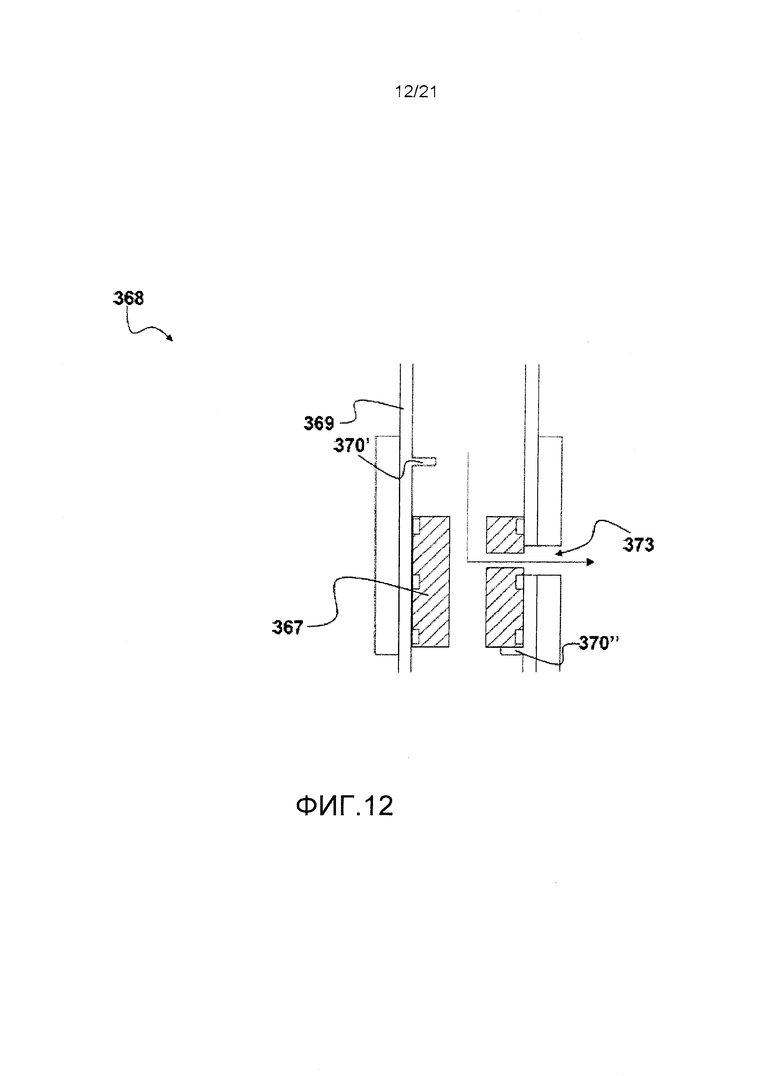
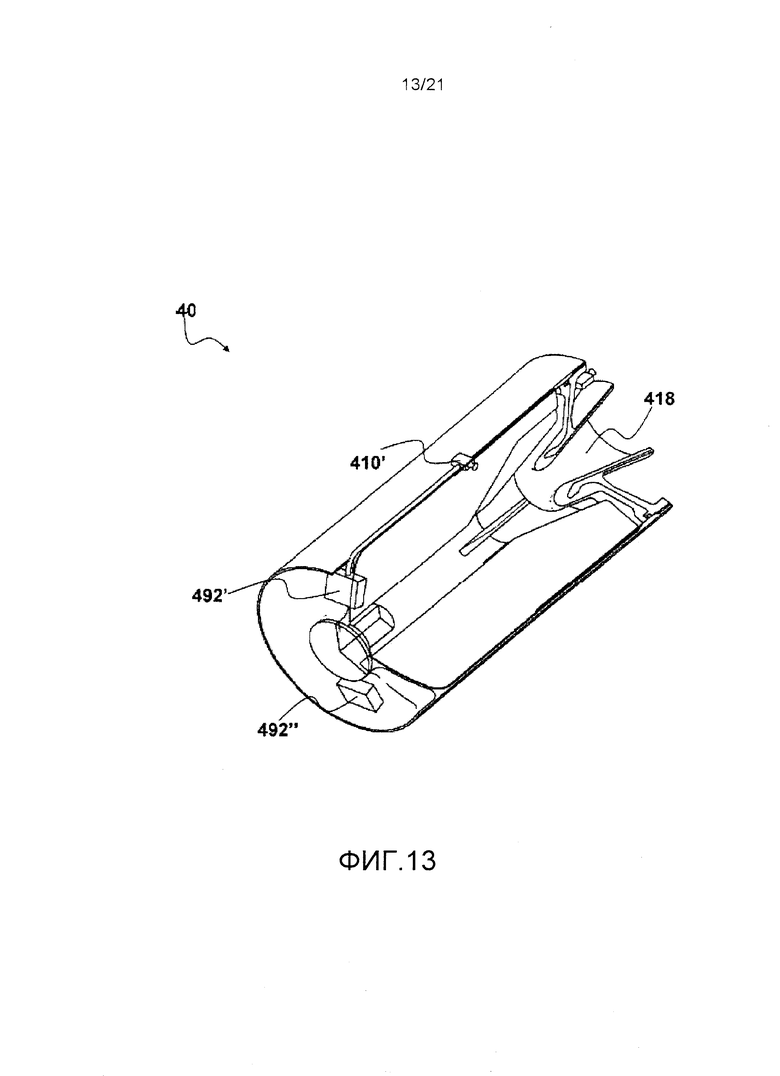

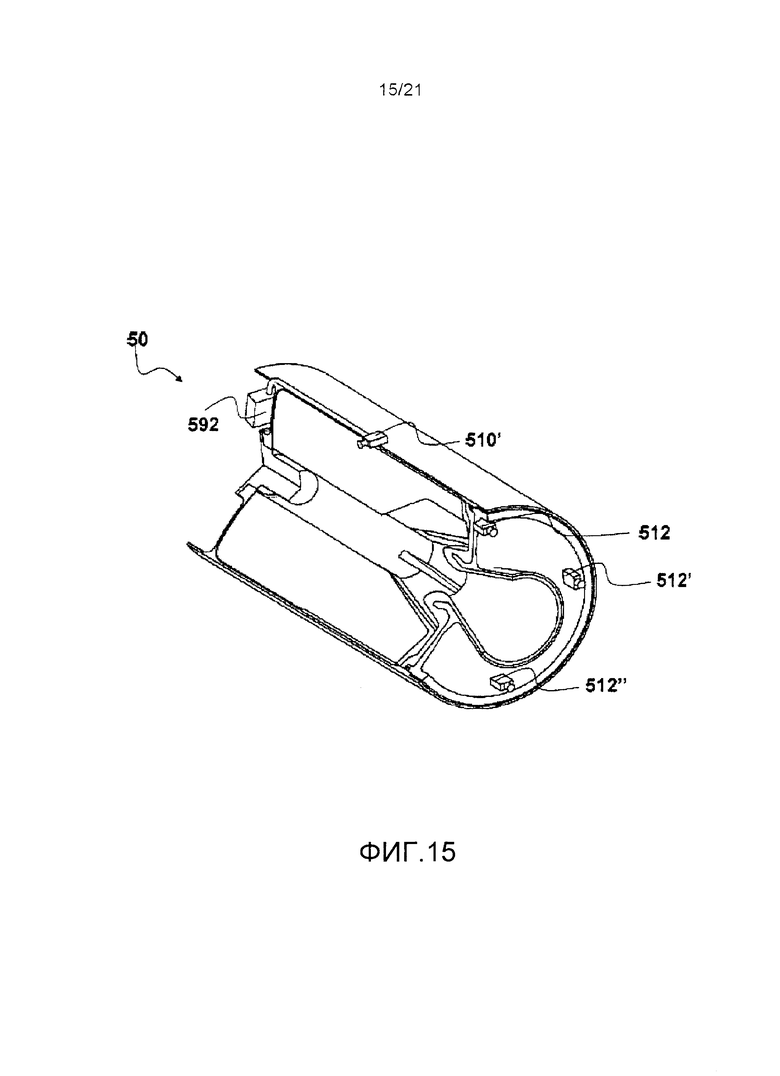
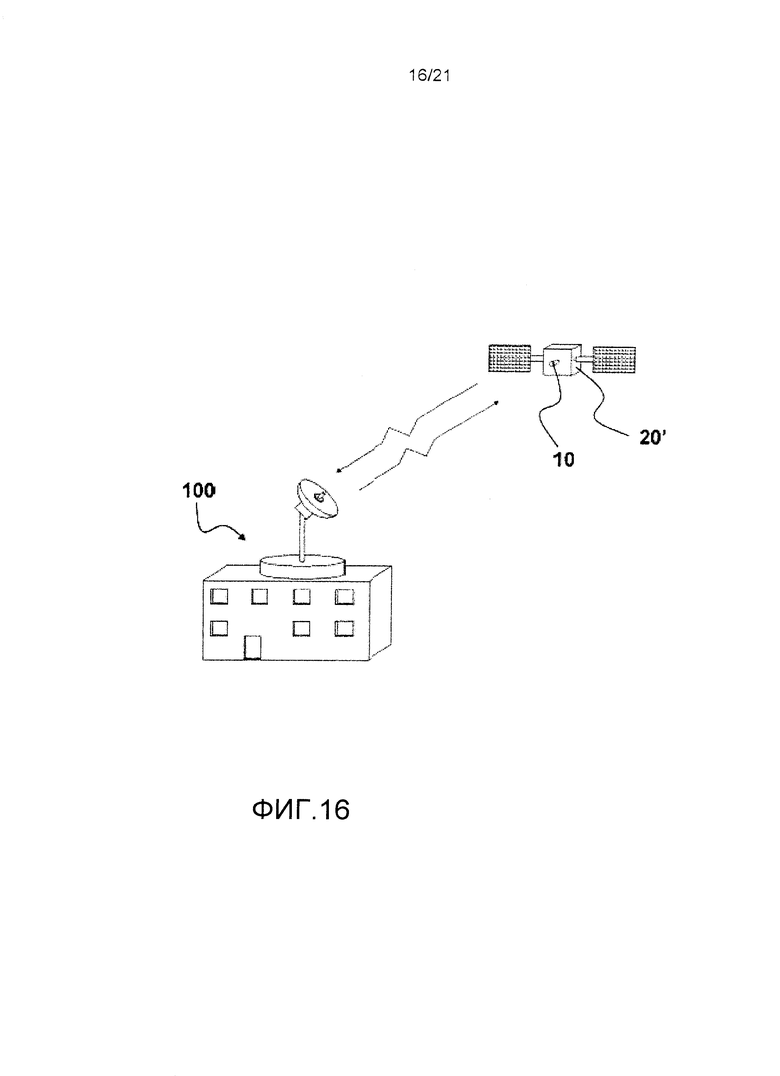
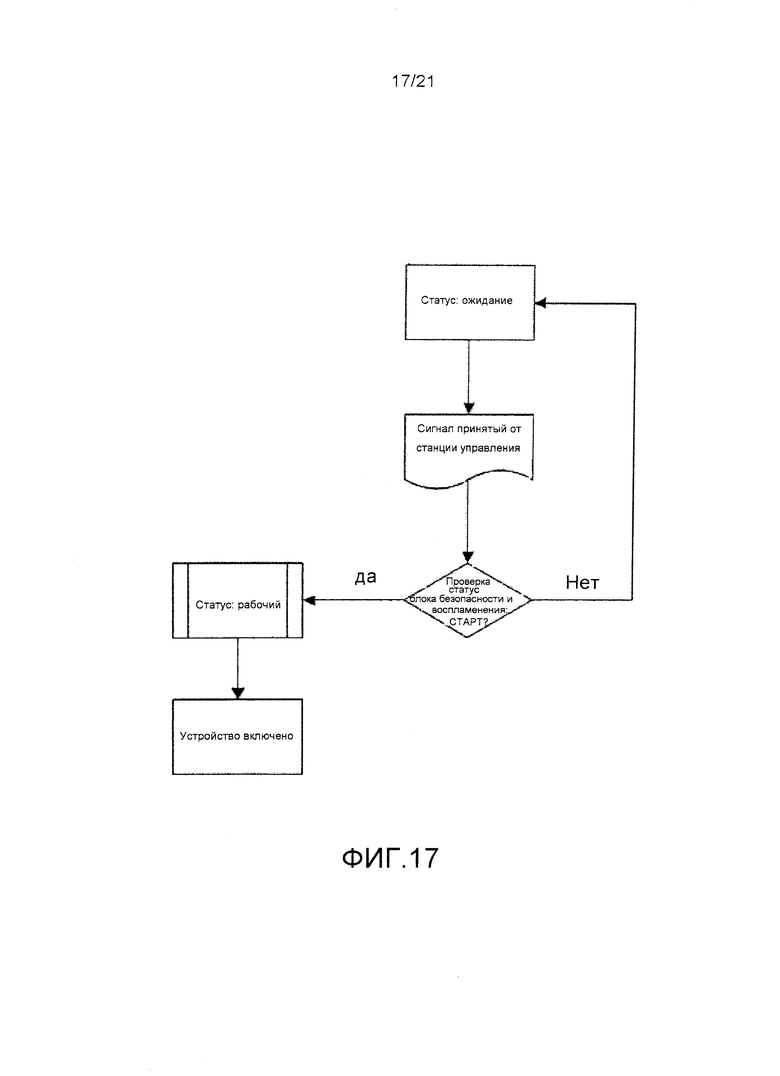
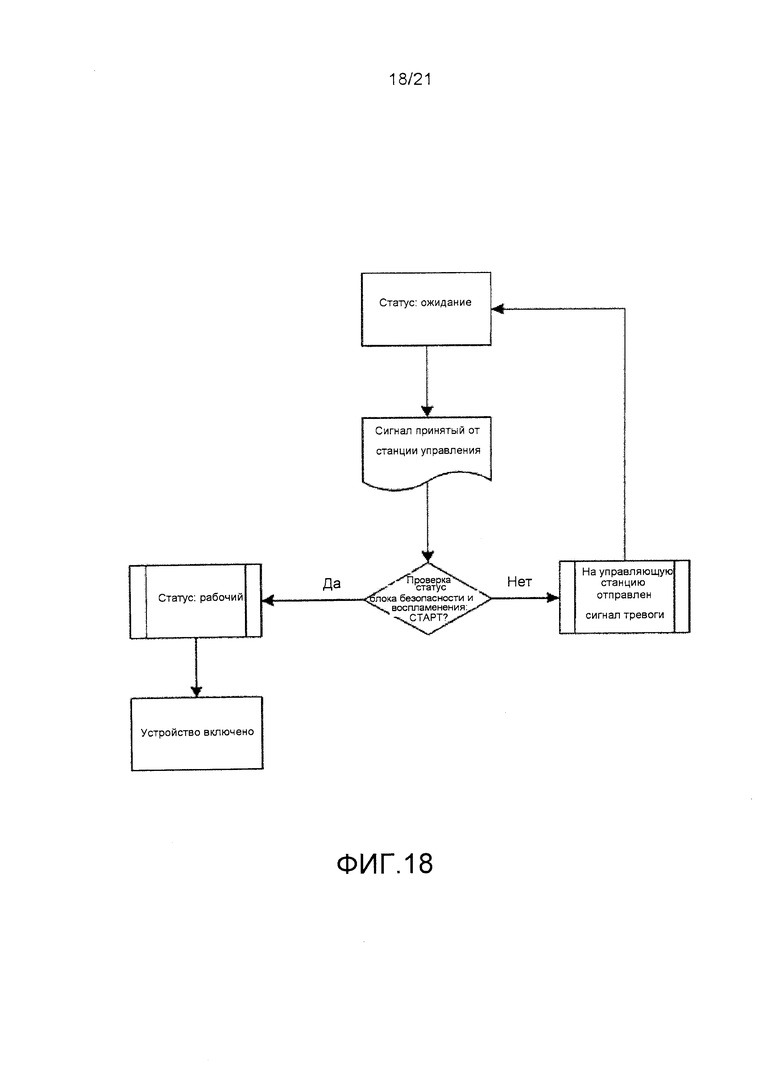
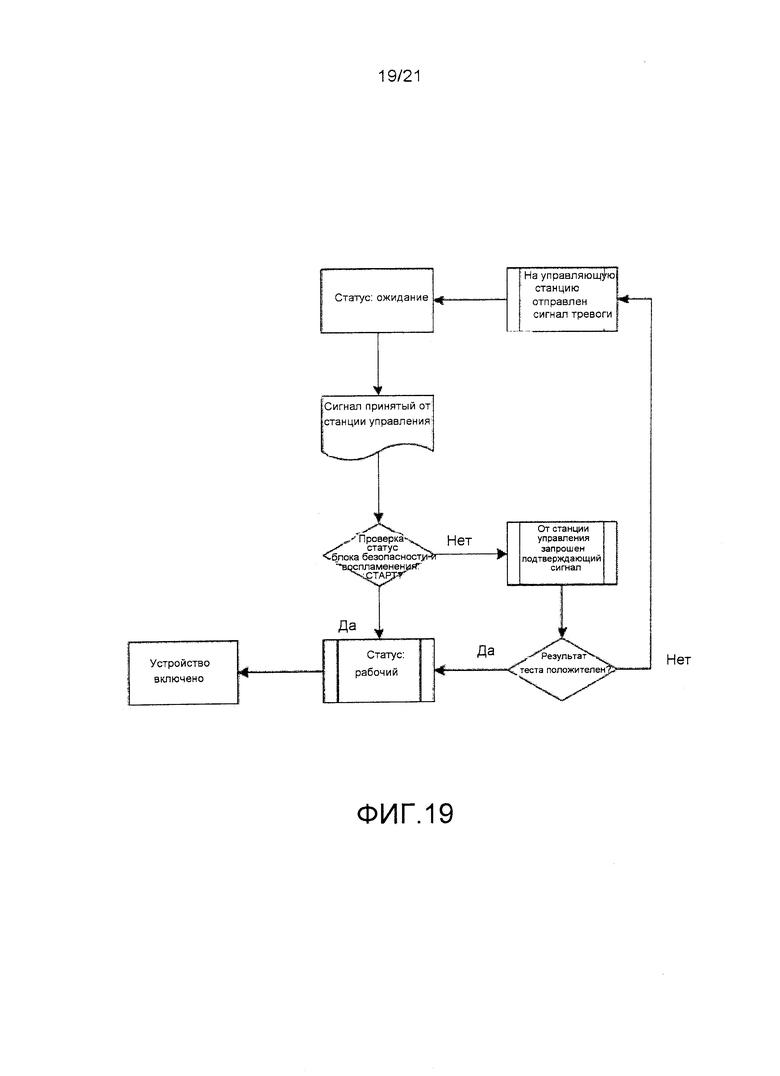
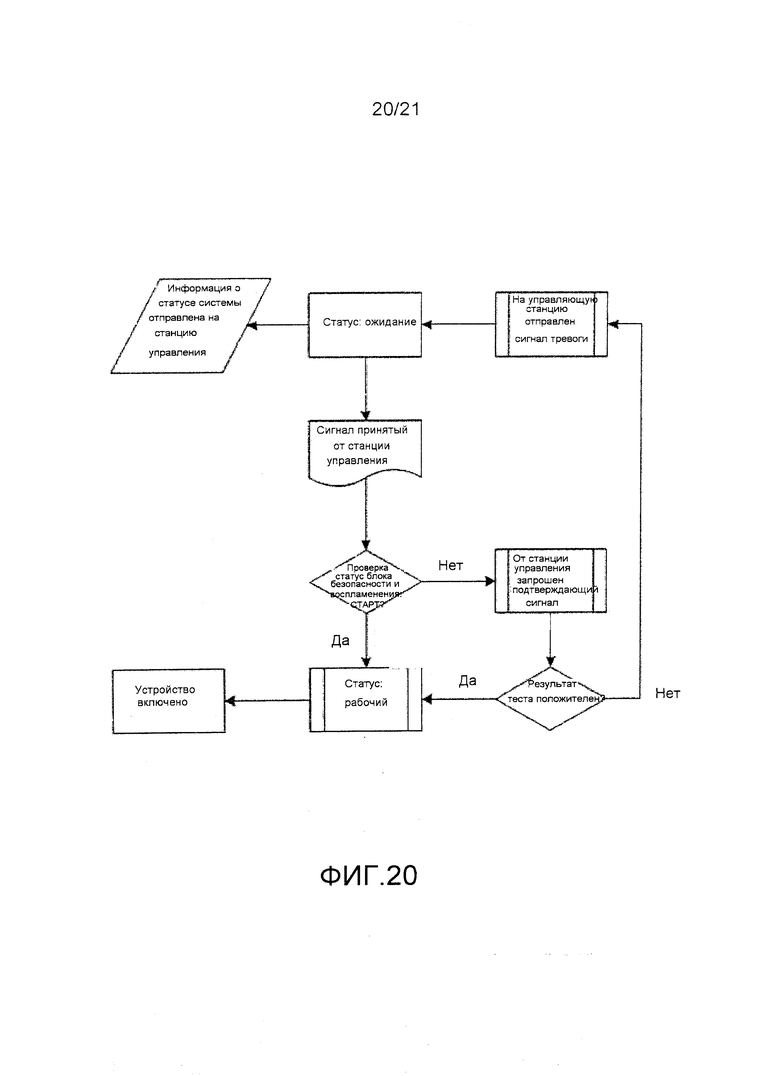
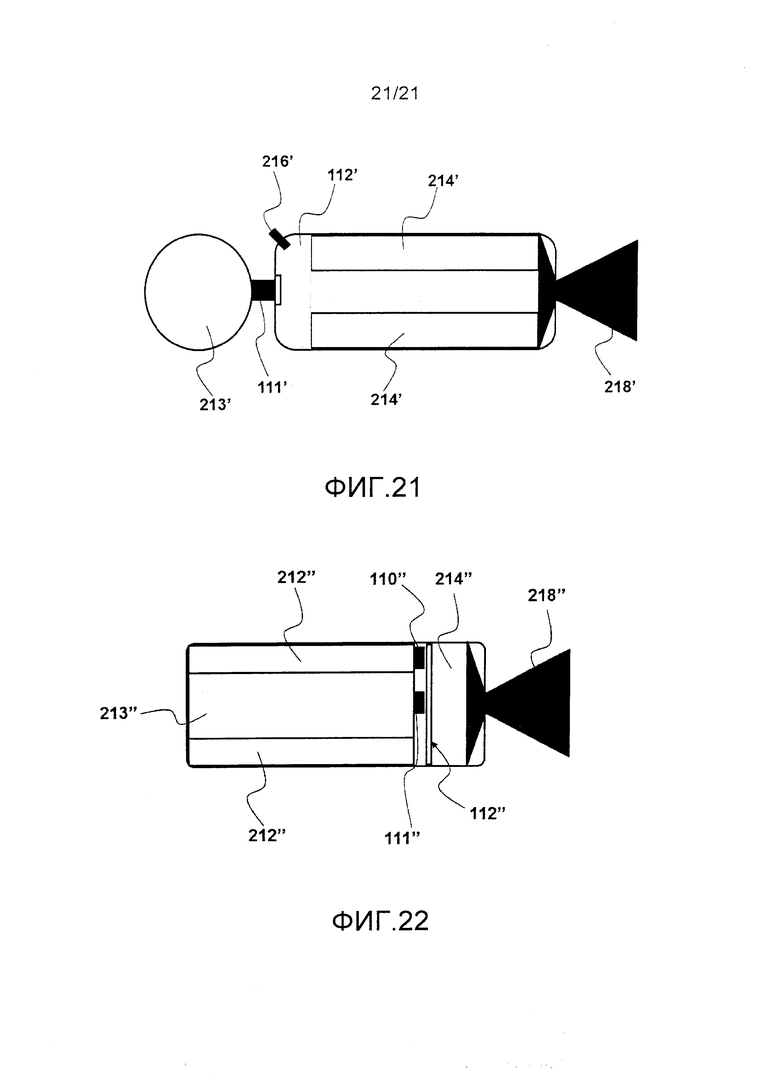
Изобретение относится к ракетным двигательным средствам для орбитальных маневров и/или спуска космических аппаратов (КА) на Землю. Предлагаемое устройство в значительной степени автономно и соединяется с КА перед его запуском. Оно содержит ракетный (в т.ч. гибридный или гелиевый) двигатель и средства регулирования его положения (вектора тяги) относительно КА. Устройство функционально связано с бортовым и/или дистанционным средствами управления. Двигатель включается после приема сигналов на снятие КА (20′) с орбиты (2) и спуска на Землю (1), либо на перемещение КА (20") с орбиты (3) на заданную орбиту (4). Технический результат изобретения состоит в повышении эффективности (в т.ч. надёжности) обеспечения вышеописанных операций КА. 16 з.п. ф-лы, 22 ил.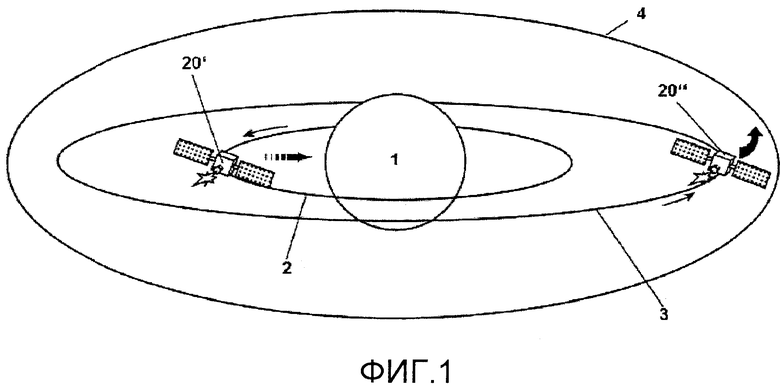
1. Устройство (10), соединяемое с космическим спутником (20′, 20′′) перед запуском для удаления упомянутого спутника из космоса или перемещения упомянутого спутника на другую космическую орбиту с помощью средства удаленного управления или с помощью упомянутого устройства, отличающееся тем, что упомянутое устройство является независимым от упомянутого спутника и от упомянутого средства удаленного управления и содержит:
- бортовое средство управления упомянутого устройства (10);
- средство приема управляющих сигналов от упомянутого средства удаленного управления или средства для передачи управляющих сигналов для активации последовательности перемещения/возврата, функционально соединенное с упомянутым бортовым средством управления;
- двигательное средство, функционально соединенное с упомянутым бортовым средством управления, при этом упомянутое двигательное средство активируется упомянутым бортовым средством управления при приеме упомянутых управляющих сигналов для удаления упомянутого спутника (20′, 20′′) из космоса в заранее определенную область Земли или для перемещения упомянутого спутника (20′, 20′′) на заранее определенную другую космическую орбиту;
- средство электропитания для упомянутого устройства (10), чтобы устройство не зависело от спутника;
- механическое средство (310) для соединения упомянутого устройства (10) со спутником (20′, 20′′) перед запуском;
- средство уменьшения угловой ошибки вектора тяги, функционально соединенное с упомянутым бортовым средством управления;
при этом упомянутое средство уменьшения угловой ошибки содержит средство для активного и/или пассивного управления вектором тяги, которое осуществляет выравнивание упомянутого вектора тяги, причем упомянутое средство активного и/или пассивного управления вектором тяги осуществляет регулируемое и/или подвижное соединение между упомянутым спутником (20′, 20′′) и упомянутым устройством с целью выравнивания упомянутого вектора тяги.
2. Устройство по п. 1, отличающееся тем, что содержит средство определения пространственного положения спутника и/или управления пространственным положением спутника, функционально соединенное с упомянутым средством уменьшения угловой ошибки.
3. Устройство по п. 2, отличающееся тем, что упомянутое средство для определения пространственного положения и/или управления пространственным положением спутника функционально соединено с упомянутым бортовым средством управления и осуществляет управление ориентацией упомянутого устройства и упомянутого спутника (20′, 20′′), когда упомянутое двигательное средство активировано.
4. Устройство по любому из пп. 1-3, отличающееся тем, что упомянутое бортовое средство управления содержит средство передачи заранее запрограммированных управляющих сигналов и/или средство расчета упомянутых управляющих сигналов для отправки на упомянутое средство приема управляющих сигналов.
5. Устройство по п. 1, отличающееся тем, что содержит первое средство датчика, функционально соединенное с упомянутым бортовым средством управления для обнаружения других объектов в зоне безопасности, определенной вокруг упомянутого устройства и/или спутника (20′, 20′′).
6. Устройство по п. 1, отличающееся тем, что содержит второе средство датчика, функционально соединенное с упомянутым бортовым средством управления для обнаружения ударных повреждений упомянутого устройства и/или спутника (20′, 20′′).
7. Устройство по п. 1, отличающееся тем, что содержит третье средство датчика, функционально соединенное с упомянутым бортовым средством управления, для обнаружения неисправностей упомянутого спутника (20′, 20′′).
8. Устройство по п. 1, отличающееся тем, что упомянутое механическое соединительное средство осуществляет регулируемое соединение между упомянутым спутником (20′, 20′′) и упомянутым устройством.
9. Устройство по п. 8, отличающееся тем, что упомянутое механическое соединительное средство содержит упомянутое средство для активного и/или пассивного управления вектором тяги, которое осуществляет регулируемое и/или подвижное соединение между упомянутым спутником (20′, 20′′) и упомянутым устройством с целью выравнивания упомянутого вектора тяги.
10. Устройство по п. 1, отличающееся тем, что двигательное средство содержит по меньшей мере твердотопливный двигатель и по меньшей мере воспламенитель для этого твердотопливного двигателя; при этом воспламенитель функционально соединен с упомянутым бортовым средством управления для приема сигнала о моменте воспламенения.
11. Устройство по п. 10, отличающееся тем, что упомянутое двигательное средство содержит один или более независимых картриджей или зарядов с твердым топливом.
12. Устройство по п. 1, отличающееся тем, что упомянутое двигательное средство содержит гибридное двигательное средство.
13. Устройство по п. 1, отличающееся тем, что упомянутое двигательное средство содержит двигательное средство с гелеобразным топливом.
14. Устройство по п. 4, отличающееся тем, что содержит первое средство датчика, функционально соединенное с упомянутым бортовым средством управления для обнаружения других объектов в зоне безопасности, определенной вокруг упомянутого устройства и/или спутника (20′, 20′′).
15. Устройство по п. 5, отличающееся тем, что содержит второе средство датчика, функционально соединенное с упомянутым бортовым средством управления для обнаружения ударных повреждений упомянутого устройства и/или спутника (20′, 20′′).
16. Устройство по п. 6, отличающееся тем, что содержит третье средство датчика, функционально соединенное с упомянутым бортовым средством управления, для обнаружения неисправностей упомянутого спутника (20′, 20′′).
17. Устройство по п. 7, отличающееся тем, что упомянутое механическое соединительное средство осуществляет регулируемое соединение между упомянутым спутником (20′, 20′′) и упомянутым устройством.
| SCHONENBORG R | |||
| Solid Propellant De-orbiting for Constellation Satellites | |||
| Proc | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| on CDROM, p.82.1-82.6 | |||
| СПОСОБ ДОСТАВКИ НЕБЕСНОГО ТЕЛА К ПЛАНЕТЕ НАЗНАЧЕНИЯ И КОСМИЧЕСКОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1987 |
|
RU2026243C1 |
| US 20070120020 A1, 31.05.2007 | |||
| US 3200587 А, 17.08.1965 | |||
| US 7587325 В1, 08.09.2009. | |||

