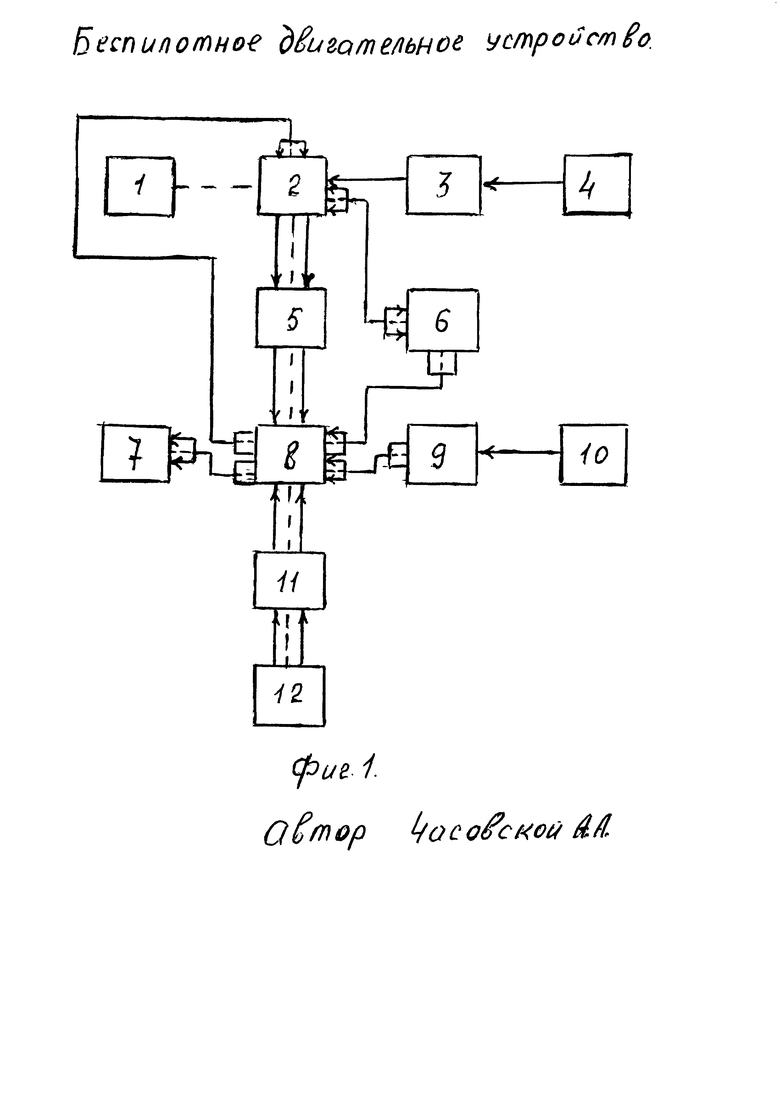
Изобретение относится к области транспортной техники и может быть использовано для перевозки полезных грузов и пассажиров. Известно беспилотное двигательное устройство, представленное в книге «Вооружение и военно-морская техника» изд. Военный парад, 2003 г. стр. 40. Оно может представлять из себя корабль или автомобиль и состоит из корпуса, жестко связанного с блоком обнаружения и управления, осуществляющего вторичную обработку для предотвращения столкновений и осуществляющим управление движением и поворотами. В состав блока может входить телевизионный автоматический координатор, работающий и в инфракрасном спектре, и сканирующий лазер, излучающий световые импульсы по целеуказаниям координатора. На основании информации о дальности и направлении объектов задается скорость и направление, которые реализуются в блоке обеспечения движения и в блоке обеспечения поворота. При наличии красного огня светофора, представляющего датчик сигнала запрета движения, выдается оптический сигнал в приемник сигнала запрета движения, где он преобразуется в электрический и поступает в блок обнаружения и управления. В состав устройства так же входит радиопередающее и радиоприемное устройства. Однако длительность беспилотного движения не всегда достаточна. Известно беспилотное двигательное устройство, представленное в патенте автора №2384864 как носитель блока обнаружения и управления, представляющий из себя, например, автомобиль. Он может осуществлять автоматическое обнаружение и вторичную обработку объектов. В устройство входят те же узлы, что и в вышеупомянутом аналоге, кроме того, он обеспечивает телевизионное автоматическое определение дальности до впереди идущего объекта, используя метод треугольника, по известной высоте телевизионной камеры и нижней контрастной координате автомобиля или объекта, находящегося впереди, а также метки на автомобиле, находящейся на определенной высоте. Однако длительность беспилотного движения не всегда достаточна. С помощью предлагаемого устройства увеличивается длительность беспилотного движения. Достигается это введением блока определения местоположения, датчика местоположения начала и конца маршрута, датчика угла поворота и приемника угла поворота, электромагнитный вход которого связан с электромагнитным выходом вышеупомянутого датчика угла поворота, а группа выходов этого приемника соединена с первой группой входов блока определения местоположения, имеющего первую и вторую группу выходов, соответственно соединенных: с группой входов радиопередающего устройства, и с группой входов блока обнаружения и управления, жестко связанного с корпусом, к тому же вторая, третья и четвертая группа входов блока определения местоположения соответственно соединены: через датчик местоположения начала и конца маршрута с группой выходов радиоприемного устройства, с группой выходов блока обеспечения движения, с группой выходов блока обеспечения поворота. На фиг. 1 и в тексте приняты следующие обозначения:
1 - корпус
2 - блок обнаружения и управления
3 - приемник сигнала запрета движения
4 - датчик сигнала запрета движения
5 - блок обеспечения движения
6 - блок обеспечения поворота
7 - радиопередающее устройство
8 - блок определения местоположения
9 - приемник угла поворота
10 - датчик угла поворота
11 - датчик местоположения начала и конца маршрута
12 - радиоприемное устройство, при этом электромагнитный выход датчика угла поворота 10 связан с электромагнитным входом приемника угла поворота 9, имеющего группу выходов, соединенную с первой группой входов блока определения местоположения 8, имеющего первую группу выходов, соединенную с группой входов радиопередающего устройства 7, и имеющего вторую и третью группу выходов, соответственно соединенных: через датчик местоположения начала и конца маршрута 11 с группой выходов радиоприемного устройства 12, через блок обеспечения движения 5 с первой группой выходов блока обнаружения и управления, жестко связанного с корпусом 1 и имеющего вторую группу выходов, соединенную через блок обеспечения поворотов с четвертой группой входов блока определения местоположения 8, к тому же блок обнаружения и управления 2 имеет вход, соединенный с выходом приемника сигнала запрета движения 3, имеющий оптический вход, связанный с оптическим выходом датчика сигнала запрета движения 4 и, кроме того, блок обнаружения и управления 2 имеет группу входов, соединенную с второй группой выходов блока определения местоположения 8.
Работа устройства осуществляется следующим образом, корпус 1, например автомобиля, жестко связан с блоком обнаружения и управления 2, с помощью которого осуществляется определение дальности и угловых координат объектов и их вторичная обработка. В состав блока 2 может входить телевизионный координатор и лазерное сканирующее устройство. После фиксации угловых координат выдается команда на излучение импульса лазерному передатчику. По временному рассогласованию между моментом излучения светового импульса и приходом отраженного светового сигнала определяется дальность. При выделении с помощью телевизионного датчика впереди идущей машины дальность может быть определена методом треугольника по известной высоте телевизионного датчика и контрастным видеосигналам, например, от нижней части шины впереди идущей машины или видеосигналом от контрастной метки, размещенной на строго определенной высоте позади и выше шин или нижней части кромки какого-либо объекта, контрастность которого отличается от окружающих уровней. Пример конкретного исполнения блока обнаружения и управления представлен в книге «Авиация и ПВО России», Дрофа, М. 2005, стр. 495-496, а так же в патенте автора №2032918 под названием «Локационное устройство». Анализируя обстановку, блок 2 задает скорость и угол поворота, используя так же информацию об ожидаемом угле поворота с блока 8, и выдает окончательную информацию в блок обеспечения движения 5, в блок обеспечения поворота 6 для реализации. С этих блоков фактическое значение скорости и угла поворота поступает в блок 8, где преобразуется к виду, подходящему для дальнейшей цифровой обработки при определении текущего местоположения. При наличии запрещающего сигнала в датчике сигнала запрета движения 4 срабатывает приемник сигнала запрета движения 3, оптический вход которого связан с оптическим выходом датчика 4. В приемнике 3 оптический сигнал преобразуется в электрический и поступает в блок обнаружения и управления 2, прекращающий выдачу информации в блоки 5 и 6. Маршрут движения задается датчиком местоположения начала и конца маршрута 11 и поступает в блок 8, который его определяет, как уже отмечалось, последовательно, по мере движения, выдает команды в блок 2. Информация в блок 11 поступает с радиоприемного устройства, преобразующего электромагнитные сигналы в электрические. Информация характеризует номер прямоугольника и район начала и конца маршрута, и номер района, в котором находятся эти прямоугольники, на которые разделена вся территория. Путь следования автомобиля формируется в блоке 8 и состоит из определенного количества участков, в которые входят прямоугольники. В конце каждого участка размещен датчик угла поворота 10, где отображается направление следования и номер прямоугольника и района, в котором он находится. При этом электромагнитный выход датчика 10 связан с электромагнитным входом приемника угла поворота 9, размещенным на автомобиле, где электромагнитный сигнал преобразуется в электрический и сравнивается с расчетным в блоке 8. Задав маршрут заранее, блок 8 выдает последовательно информацию в блок 2 о повороте, и как было отмечено ранее, сравнивает заданную величину поворота с фактической, и в случае отличия предварительно осуществляет в блоке 8 выработку другого маршрута до конечного пункта. Текущее местоположение поступает в радиопередающее устройство 7, где электрические сигналы преобразуются в электромагнитные и излучаются в пространство. При наличии пилота местоположение может быть отображено с помощью индикатора в блоке 8, а начало и конец маршрута могут задаваться с помощью пульта в блоке 11. Возможен режим перехода в ручное управление или на движение с уменьшенной длительностью. Блок 8 так же, как и узлы блока 2, выполняет функции блока вторичной обработки и представлен, например, в книге «Радиотехнические системы», Пестряков В.П. и др. 1985 г., стр. 219. Кроме того, блок 8 выполняет функции навигатора. Использование предлагаемого устройства снимает напряжение людей, связанное с необходимостью вождения автомобиля, и в связи с этим снимет усталость и позволит уделить внимание основной деятельности и снять лишнюю нагрузку
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАТОР | 1993 |
|
RU2088950C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1995 |
|
RU2097788C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ИМПУЛЬСНЫХ ИЗЛУЧАТЕЛЕЙ | 2016 |
|
RU2604353C1 |
| РАДИОЛОКАТОР | 1995 |
|
RU2096806C1 |
| РАДИОЛОКАТОР | 1994 |
|
RU2081429C1 |
| РАДИОЛОКАТОР | 1992 |
|
RU2073883C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТЫ | 1996 |
|
RU2119176C1 |
| РАДИОЛОКАТОР | 1993 |
|
RU2073881C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1996 |
|
RU2096810C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1995 |
|
RU2097789C1 |
Изобретение относится к области транспортной техники. Беспилотное двигательное устройство состоит из корпуса, блока обнаружения и управления, датчика сигнала запрета движения, приемника сигнала запрета движения, блока обеспечения движения, блока обеспечения поворота, радиоприемного и радиопередающего устройств. Корпус жестко связан с блоками обнаружения и управления. Радиопередающее устройство имеет первую и вторую группу выходов и отдельный вход соответственно соединенные с группой входов блока обеспечения движения, группой входов блока обеспечения поворота, выходом приемника запрета движения, имеющего оптический вход, связанный с оптическим выходом датчика сигнала запрета движения. Также устройство содержит блок определения местоположения, датчики местоположения начала и конца маршрута, датчик и приемник угла поворота. Приемник соединен с блоком определения местоположения, соединенным с радиопередающим устройством и блоком обнаружения и управления. Вторая, третья и четвертая группы входов блока определения местоположения соединены через датчик местоположения начала и конца маршрута с радиоприемным устройством, блоком обеспечения движения, и блоком обеспечения поворота. Достигается повышение комфортности управления транспортным средством.1 ил.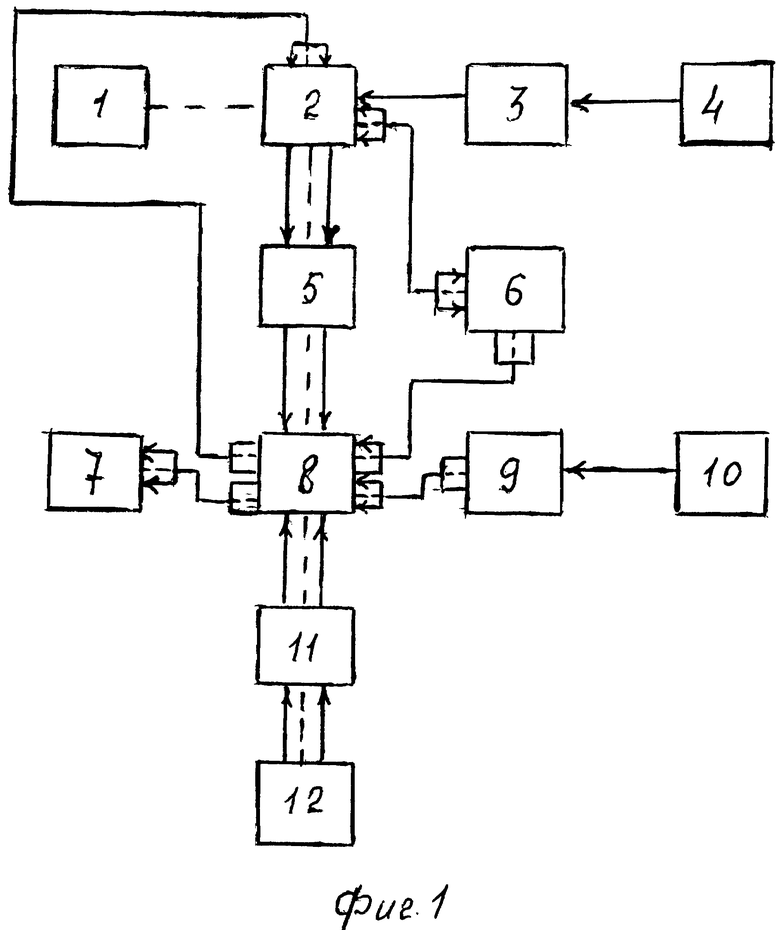
Беспилотное двигательное устройство, состоящее из корпуса, блока обнаружения и управления, датчика сигнала запрета движения, приемника сигнала запрета движения, блока обеспечения движения, блока обеспечения поворота, радиоприемного и радиопередающего устройства, где корпус жестко связан с блоком обнаружения и управления, имеющего первую и вторую группу выходов и отдельный вход, соответственно соединенные с группой входов блока обеспечения движения, с группой входов блока обеспечения поворота, с выходом приемника запрета движения, имеющего оптический вход, связанный с оптическим выходом датчика сигнала запрета движения, отличающееся введением: блока определения местоположения, датчика местоположения начала и конца маршрута, датчика угла поворота и приемника угла поворота, электромагнитный вход которого связан с электромагнитным выходом вышеупомянутого датчика угла поворота, а группа выходов этого приемника соединена с первой группой входов блока определения местоположения, имеющего первую и вторую группу выходов, соответственно соединенных: с группой входов радиопередающего устройства, и с группой входов блока обнаружения и управления, жестко связанного с корпусом, к тому же вторая, третья и четвертая группа входов блока определения местоположения соответственно соединены: через датчик местоположения начала и конца маршрута с группой выходов радиоприемного устройства, с группой выходов блока обеспечения движения, с группой выходов блока обеспечения поворота.
| Способ накатки резьбы цилиндрическими накатниками | 1956 |
|
SU109096A1 |
| 0 |
|
SU165180A1 | |
| Токарный резец | 1924 |
|
SU2016A1 |

