Настоящее изобретение относится к способу контроля давления шины, смонтированной на ободе колеса транспортного средства, и к системе для осуществления такого способа.
Изобретение относится также к транспортному средству, содержащему такую систему контроля давления шины.
В области автомобильной промышленности различные регламентные нормы требуют от конструкторов автомобилей применения в производимых транспортных средствах способов и систем контроля давления шин. Например, в Европе регламентные нормы предусматривают, чтобы такие способы позволяли обнаруживать изменение давления на более 20% для четырех шин в течение чуть менее одного часа.
Такие регламентные требования предусмотрены для решения проблем безопасности, а также для снижения влияния автомобильного движения на окружающую среду. Действительно, многочисленные исследования показали, что риски ДТП повышаются, если шина перекачана, так как в этом случае повышается дистанция торможения, и, наоборот, если давление в шине является недостаточным, это приводит к перерасходу топлива и к преждевременному износу шин.
В таком контексте конструкторы автомобилей разработали способы контроля, позволяющие обнаруживать изменение давления шины, которые подразделены на две группы: так называемые «прямые» способы контроля и так называемые «непрямые» способы контроля.
В группе так называемых «прямых» способов контроля обнаружение изменения давления шины осуществляют посредством обработки данных, относящихся к измерению давления и температуры газа, содержащегося в шине.
Такую обработку осуществляют при помощи систем контроля, таких как вычислительные устройства транспортного средства или, в частности, блоки TPMS (сокращение от Tyre Pressure Measurement System).
Эти системы выполнены с возможностью получения данных от датчиков, которые, как правило, связаны с клапаном шины и традиционно соединены при помощи беспроводной связи с вычислительным устройством или блоком.
Таким образом, способ контроля позволяет обнаружить, например, утечку или состояние недостаточного давления или перекачки шины на основании изменения давления и температуры, измеряемых в течение времени.
Однако такие способы контроля являются дорогими и не совсем надежными. Они часто приводят к появлению ложных тревожных сигналов, например, при ошибочном обнаружении утечек или состояний недостаточного давления или перекачки шины. Действительно, давление газа, содержащегося в этой шине, измеряемое датчиком, может значительно меняться, например, при повышении температуры обода по причине его близости к тормозному модулю, или при прохождении колеса через препятствие, такое как бордюр тротуара.
В группе так называемых «непрямых» способов контроля давления шины давление шины и, следовательно, изменение давления не измеряют, а оценивают при помощи систем контроля давления. Для этого системы контроля связаны с активными системами безопасности, которые сообщаются с одним или несколькими датчиками, выполненными с возможностью выдавать информацию о состоянии колес, такими как антиблокировочная система колес, например, ABS (сокращение от "Antilock Brake System") и ESP (сокращение от "Electronic Stability System").
Эти «непрямые» способы контроля могут быть временными или частотными.
Способы контроля временного типа осуществляют сравнение скоростей вращения колес на основании данных, поступающих от неподвижных датчиков скорости вращения колеса системы ABS. Действительно, эта система ABS использует датчик для каждого колеса, который выдает его угловое положение в виде импульсов. Зная, например, что на прямой линии разность давления в шинах приводит к разности диаметра колес и, следовательно, скорости вращения, как только способ контроля обнаруживает отклонение скорости вращения для одного колеса, определяют изменение давления указанного колеса.
Что касается способов контроля частотного типа, то они состоят в сравнении измеряемой частоты с контрольной частотой, связанной с данной частью шины, которая вибрирует, когда транспортное средство находится в движении. Как только обнаруживают изменение частоты на этой данной части колеса, делают вывод об изменении давления, которое может свидетельствовать о перекачке или недостаточной накачке.
Однако одним из недостатков этих «непрямых» способов контроля является неточность оценок изменения давления, что также часто приводит к ложным тревожным сигналам о состояниях перекачки или недостаточного давления шины.
Следует отметить, что «непрямые» способы контроля временного типа позволяют обнаруживать изменение шины, только если все шины транспортного средства одновременно имеют утечки или находятся в состоянии недостаточного давления или перекачки.
Настоящее изобретение призвано устранить все или часть вышеупомянутых недостатков и предложить надежные и точные способ и систему контроля давления шины.
Объектом изобретения является способ контроля давления шины, смонтированной на ободе колеса движущегося транспортного средства, при этом способ содержит следующие этапы:
- измеряют температуру непосредственной окружающей среды транспортного средства;
- производят оценку массы транспортного средства;
- измеряют по меньшей мере первую частоту колебаний шины в первом частотном диапазоне и вторую частоту колебаний шины во втором частотном диапазоне и
- определяют давление шины в зависимости от измеренных первой и второй частот колебаний и температуры, а также от оценочной массы транспортного средства.
В других вариантах осуществления:
- определение давление шины включает в себя следующие этапы:
• среди контрольных данных выбирают контрольные частоты колебаний, связанные с давлениями шины и входящие в первый частотный диапазон и во второй частотный диапазон, и
• для первой и второй измеренных частот колебаний, соответствующих первой и второй контрольным частотам, определяют первое оценочное давление и второе оценочное давление шины,
- этап выбора контрольных частот колебаний осуществляют в зависимости от измеренной температуры и/или от оценочной массы;
- этап определения давления шины включает коррекцию первого и второго оценочных давлений с целью получения первого и второго скорректированных давлений в зависимости от изменения температуры между измеренной температурой и предыдущей измеренной температурой;
- этап определения включает в себя этап обработки первого и второго скорректированных давлений, относящихся к первой и второй измеренным частотам колебаний;
- первая и вторая измеренные частоты колебаний и контрольные частоты колебаний связаны с вибрациями, исходящими от:
• боковины шины, которая подвергается деформации типа кручения;
• протектора, который подвергается деформациям, поперечным по отношению к направлению движения транспортного средства, и/или
• части шины, которая подвергается трехмерным деформациям,
- этап определения давления осуществляют при помощи фильтра Калмана, и
- способ содержит этап передачи тревожного сигнала водителю транспортного средства в зависимости от обнаружения изменения давления шины.
Объектом изобретения является также система контроля давления шины, содержащая вычислительный блок, связанный с датчиками данных, и аппаратные и программные элементы для осуществления такого способа, в которой аппаратные элементы включают в себя модуль памяти, содержащий контрольные данные.
Объектом изобретения является также транспортное средство, содержащее такую систему контроля давления шины.
Объектом изобретения является также компьютерная программа, содержащая командные коды программы для осуществления этапов способа, когда указанную программу исполняет вычислительный блок системы контроля давления шины.
Другие преимущества и признаки изобретения будут более очевидны из нижеследующего описания предпочтительного варианта осуществления, представленного в качестве не ограничительного примера, со ссылками на прилагаемые чертежи.
Фиг. 1 - принципиальная схема системы контроля давления шины согласно варианту осуществления изобретения.
Фиг. 2 - кривые контрольных частот колебаний, связанных с давлениями шины, для разных масс транспортного средства, согласно варианту осуществления изобретения.
Фиг. 3 - блок-схема способа контроля давления шины согласно варианту осуществления изобретения.
Фиг. 4 - кривая оценочной частоты колебаний, скорректированной при помощи способа согласно варианту осуществления изобретения.
Фиг. 5 - схема фильтра Калмана, применяемого в рамках способа согласно варианту осуществления изобретения.
Показанная на фиг. 1 система контроля давления шины, смонтированной на колесе транспортного средства, содержит вычислительный блок 1 и датчики данных 4, 5.
Этот вычислительный блок 1 содержит аппаратные и программные элементы. Аппаратные элементы включают в себя по меньшей мере один микропроцессор 3, модуль 2 памяти, а также интерфейс 6 связи, показанные на фиг. 1. Микропроцессор 3 выполнен с возможностью взаимодействия с модулем 2 памяти с целью применения программных элементов. Этот вычислительный блок 1 может быть связан с ИЧМ (сокращение от «интерфейс человек-машина»), позволяющим, в частности, передать водителю транспортного средства тревожный сигнал о состоянии перекачки или недостаточного давления, которое в этом последнем случае может быть связано с утечкой содержащегося в шине газа.
Интерфейс 6 связи вычислительного блока 1 соединен с датчиками 4, 5 данных при помощи беспроводной или проводной связи.
Датчики данных включают в себя по меньшей мере:
- один температурный датчик 4 и
- один датчик 5 скорости.
Температурный датчик 4 расположен на уровне транспортного средства для точного измерения температуры в его непосредственной окружающей среде. Например, температурный датчик 4 может быть установлен в зеркале заднего вида транспортного средства. Этот температурный датчик 4 выполнен с возможностью передачи сигнала в направлении вычислительного блока 1.
Датчик 5 скорости является устройством определения скорости вращения колеса транспортного средства. Не ограничительно он состоит из кодирующего элемента, неподвижно соединенного с вращающимся кольцом подшипника качения транспортного средства, и из компонента, установленного неподвижно относительно не вращающегося кольца подшипника качения. Кодирующий элемент и компонент расположены друг против друга в осевом или в радиальном направлении с небольшим промежуточным зазором. Кодирующий элемент, вращаемый вращающимся кольцом, создает изменения магнитного поля. Компонент датчика выполнен с возможностью обнаружения изменений магнитного поля и их преобразования в электрический сигнал, частота которого характеризует скорость вращения подшипника. Сигнал передается от датчика в вычислительный блок 1. Каждое колесо транспортного средства оснащено таким датчиком 5 скорости.
Следует отметить, что предпочтительно вычислительный блок 1 и датчики данных, такие как датчик 5 скорости, включены в устройство ESP, которым оборудовано транспортное средство. Точно так же, температурный датчик 4 может быть датчиком данных, уже существующим на транспортном средстве и взаимодействующим с другими устройствами транспортного средства, например, такими как блок кондиционирования.
В модуле 2 памяти вычислительный блок 1 содержит контрольные данные 7, показанные на фиг. 1, которые были предварительно введены в него конструктором транспортного средства, в частности, во время изготовления транспортного средства.
Эти контрольные данные 7 представляют собой информацию о транспортном средстве, такую как параметры, связанные с шинами транспортного средства. Эти параметры получены в результате измерений, произведенных конструктором.
Как показано на фиг. 1, контрольные данные 7 включают в себя для разных контрольных масс M1, М2, …, Мх транспортного средства контрольные частоты колебаний шины, связанные с давлением содержащегося в этой шине газа.
Эти контрольные данные могут включать в себя контрольные частоты колебаний шины, связанные с давлениями для разных контрольных масс M1, М2, …, Мх и температур Т1, Т2, …, Tx.
Под частотой колебаний шины следует понимать частоту, которая измеряет гармоники и вибрации, появляющиеся на уровне различных частей шины во время движения транспортного средства. Действительно, когда транспортное средство движется, шина входит в резонанс, и ее различные части начинают вибрировать под действием деформаций.
Предпочтительно частоты колебаний шины входят в общий частотный диапазон примерно от 0 до 200 Гц, предпочтительно от 0 до 150 Гц. Каждая деформирующаяся часть шины соответствует диапазону частот колебаний, входящему в этот общий диапазон.
Для упрощения на фиг. 1 контрольные частоты колебаний для разных отдельных частотных диапазонов, в данном случае трех диапазонов, и для контрольных масс M1, М2, ..., Мх транспортного средства обозначены: F1(P1), F2(P2) и F3(Р3).
В рамках настоящего изобретения наблюдение за частотами колебаний не ограничительно осуществляют на уровне:
- боковины шины, которая подвергается деформациям типа кручения и частота колебаний которой входит в диапазон примерно 30-60 Гц, предпочтительно 35-55 Гц;
- протектора, в частности образующих его резиновых слоев, которые подвергаются деформациям, поперечным относительно направления движения транспортного средства, и частота колебаний которых входит в диапазон примерно 65-90 Гц, предпочтительно 75-85 Гц; и
- части шины, которая подвергается трехмерным деформациям, называемая также 3D-модой, и частота колебаний которой входит в диапазон примерно 95-120 Гц, предпочтительно 100-110 Гц. Эти трехмерные деформации соответствуют деформации всей шины.
Следует отметить, что изменение давления газа, содержащегося в шине, приводит к изменению частоты колебаний шины в общем частотном диапазоне.
Действительно в случае следующих частот колебаний, когда давление шины понижается:
- частота боковины шины тоже понижается;
- частота протектора повышается и
- частота 3D-моды тоже понижается.
Если же давление шины повышается:
- частота боковины шины тоже повышается;
- частота протектора понижается и
- частота 3D-моды тоже повышается.
Следует отметить, что можно учитывать также другие части шины, например, подвергающиеся деформациям, вертикальным относительно направления движения транспортного средства.
Как было указано выше, эти контрольные данные 7 соответствуют различным измерениям контрольных частот колебаний и давлений шины, которые были произведены для разных контрольных масс M1, М2, …, Мх транспортного средства, и факультативно различным контрольным температурам T1, Т2, …, Tx окружающей среды, в которой находится транспортное средство.
Эти контрольные массы M1, М2, ..., Мх находятся в диапазоне между массой транспортного средства без загрузки и массой транспортного средства с полной загрузкой.
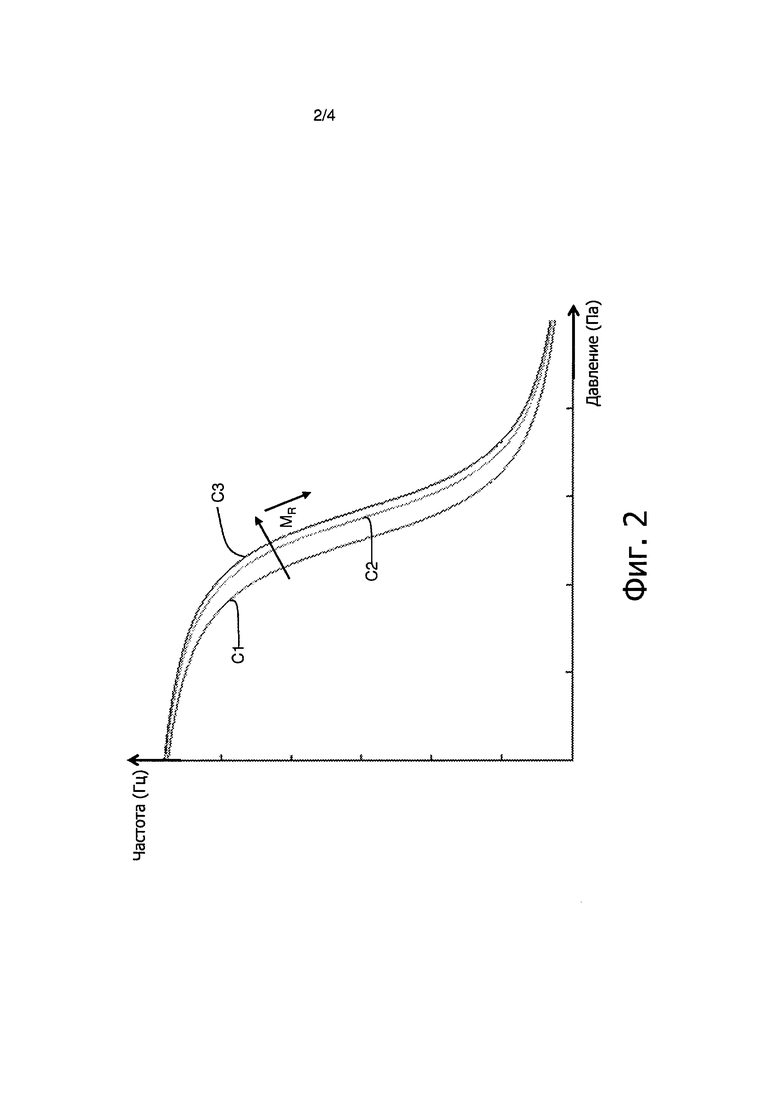
Измеряемые частоты колебаний, относящиеся к давлению, определяют кривые С1, С2 и С3, показанные на фиг. 2, для разных контрольных масс M1, М2, …, Мх транспортного средства. Кривая С1 характеризует измеренные частоты колебаний, относящиеся к давлению при минимальной массе транспортного средства, в отличие от кривой С3, которая относится к максимальной массе транспортного средства.
Показанные на фиг. 2 контрольные частоты колебаний, относящиеся к давлению шины, представленному кривыми С1-С3, соответствуют контрольным частотам колебаний протектора.
Кроме того, из фиг. 2 видно, что, чем больше контрольная масса Mr, тем выше давление и тем ниже частота колебаний. В частности, чем больше масса Mr, тем меньше радиус и тем ниже частота колебаний боковины шины. Частота колебаний моды протектора повышается, и частота моды 3D повышается.
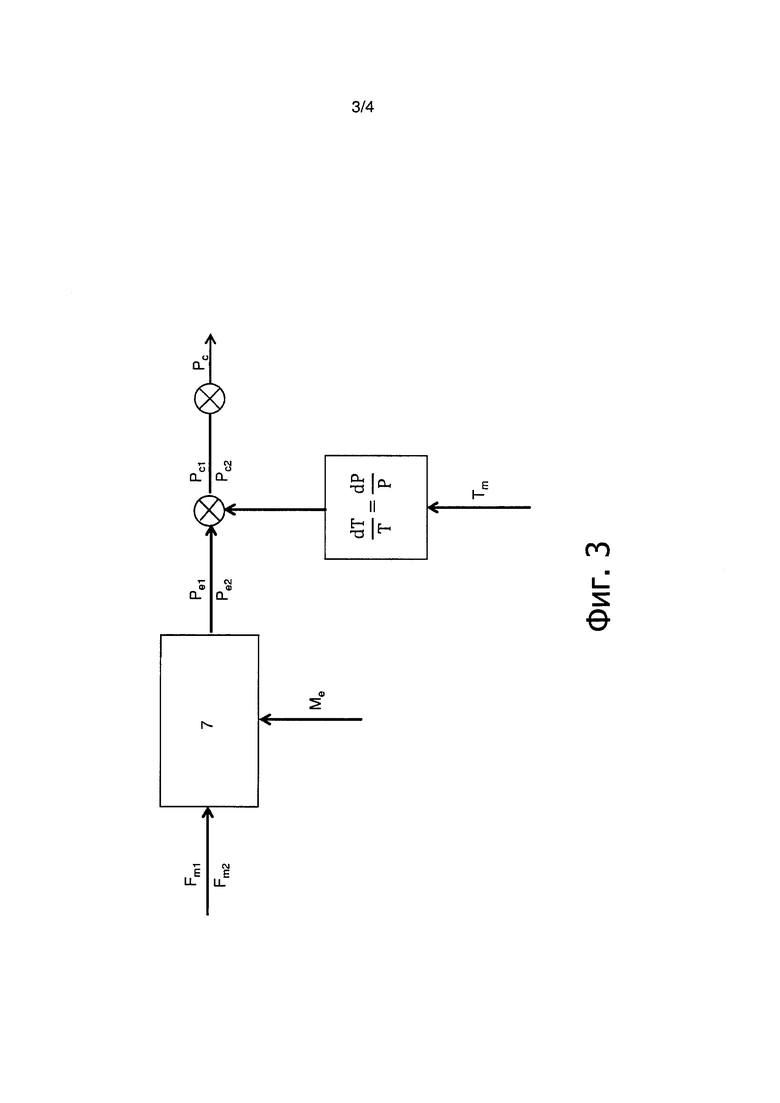
Способ контроля давления шины применяют, когда транспортное средство находится в движении. Этот способ, представленный на фиг. 3, содержит этап измерения температуры Tm непосредственной окружающей среды, в которой движется транспортное средство.
Способ содержит также этап оценки массы Ме транспортного средства, которую определяют с применением фундаментальных принципов динамики на основании баланса сил, действующих на транспортное средство.
Затем способ содержит этап измерения первой Fm1 и второй Fm2 частот колебаний шины на основании данных сигнала, переданного датчиком 5 скорости в вычислительный блок 1.
Для этого частоту колебания Fm1, Fm2 измеряют по меньшей мере в двух частотных диапазонах, то есть по меньшей мере для двух частей шины. Действительно, первую частоту колебаний Fm1 шины измеряют в первом частотном диапазоне, и вторую частоту колебаний Fm2 шины измеряют во втором частотном диапазоне.
Предпочтительно частоту колебаний измеряют в трех разных частотных диапазонах, соответствующих частотам колебаний боковины и протектора, а также 3D-моды.
В частности, вычислительный блок 1 производит обработку спектра сигнала, полученного от датчика 5 скорости, который находится на уровне колеса транспортного средства, осуществляя фильтрацию.
Эту фильтрацию осуществляют при помощи полосно-пропускающего фильтра, который является фильтром, пропускающим только полосу или частотный интервал, находящийся между нижней частотой отсечки и верхней частотой отсечки фильтра. В основе полосно-пропускающего фильтра лежит математическое преобразование, применяемое к данным, в данном случае к сигналу. Применение полосно-пропускающего фильтра можно осуществлять в цифровом виде или при помощи электронных компонентов. Это преобразование предназначено для подавления частот за пределами полосы пропускания, то есть частотного интервала, находящегося между частотами отсечки. Таким образом, сохраняются без изменения или с незначительным ослаблением только частоты, входящие в этот интервал.
Для измерения первой Fm1 и второй Fm2 частот колебаний два полосно-пропускающих фильтра конфигурированы со значениями диапазонов частот колебаний, относящихся к двум частям шины, выбранным среди боковины, протектора шины и 3D-моды.
Затем полученные фильтрованные сигналы подвергаются специальной обработке в вычислительном блоке 1, который при помощи аппаратных и программных элементов применяет рекурсивный алгоритм оценки наименьших квадратов с инструментальными переменными и с адаптивным фактором забывания.
Таким образом, первую Fm1 и вторую Fm2 частоты колебаний измеряют на основании обработки сигнала, переданного датчиком 5 скорости и связанного с угловой скоростью колеса, на котором смонтирована шина. Следует отметить, что эти первая Fm1 и вторая Fm2 частоты, измеряемые вычислительным блоком 1, называют также необработанными частотами колебаний.
Затем способ содержит этап выбора - среди контрольных данных 7 - контрольных частот колебаний, которые относятся к давлению шины и находятся в частотном диапазоне измеренных первой Fm1 и второй Fm2 частот колебаний.
В частности, эти контрольные частоты колебаний, относящиеся к давлению шины, выбирают на основании оценочной массы Ме и факультативно на основании измеренной температуры Те.
Затем способ содержит этап определения, - на основании первой измеренной частоты колебаний Fm1, соответствующей первой частоте колебаний из выбранных частот колебаний, - оценочного давления Pe1 шины. Точно так же, второе оценочное давление Ре2 определяют по соответствию второй измеренной частоты колебаний Fm2 второй частоте колебаний среди выбранных контрольных частот колебаний.
Следует отметить, что первая и вторая контрольные частоты колебаний, которые соответствуют первой Fm1 и второй Fm2 измеренным частотам, называют оценочными частотами колебаний.
Способ содержит этап вычисления изменения температуры между измеренной температурой Tm и предыдущей температурой окружающей среды, в которой двигалось транспортное средство.
Если предположить, что содержащийся в шине газ является идеальным газом, и поскольку происходит изменение температуры, а объем газа в шине не меняется, в этом случае в соответствии с законом идеальных газов PV=nRT изменение температуры равно изменению давления, то есть  .
.
Таким образом, изменение температуры, вычисленное вычислительным блоком 1, равно изменению давления, которое происходит между первым оценочным давлением Pe1 и первым скорректированным давлением Pc1, которое необходимо определить. Точно так же, речь идет об изменении давления, которое происходит между вторым оценочным давлением Ре2 и вторым скорректированным давлением Рс2, которое тоже необходимо определить.
Таким образом, способ предусматривает применение этого изменения температуры и, следовательно, давления к первому Pe1 и второму Ре2 оценочным давлениям для измеренных первой Fm1 и второй Fm2 частот колебаний, чтобы определить первое Pc1 и второе Pc2 скорректированные давления. Этот этап коррекции в рамках способа позволяет скорректировать каждое оценочное давление, которое было переоценено или недооценено.
В примере, иллюстрирующем этот этап применения способа, кривая С4, показанная на фиг. 4, характеризует пример оценочных частот колебаний для протектора шины, относящихся к оценочным давлениям, которые корректируют путем применения этого изменения давления dP к оценочным давлениям.
Таким образом, получают скорректированные первое Pc1 и второе Pc2 давления соответственно для измеренных первой Fm1 и второй Fm2 частот колебаний в разных частотных диапазонах. Эти скорректированные первое Pc1 и второе Pc2 давления подвергают специальной обработке, которая позволяет получить давление Рс шины, которое является скорректированным давлением и называется общим скорректированным давлением, и, следовательно, определить изменение давления этой шины.
Поскольку давление Рс шины, в данном случае общее скорректированное давление позволяет определить изменение давления по сравнению с предыдущим скорректированным давлением, водителю транспортного средства через ИЧМ, связанный с вычислительным блоком, направляется тревожный сигнал, оповещающий его, что одна или несколько шин его транспортного средства находятся в состоянии перекачки или в состоянии недостаточного давления с риском утечки.
Таким образом, преимуществом способа является его надежность и безотказность, так как он позволяет определять давление Рс шины, учитывая такие параметры, как масса М транспортного средства и температура Tm окружающей среды, в которой движется это транспортное средство.
Изобретение относится также к компьютерной программе, содержащей командные коды программы для осуществления этапов способа контроля давления шины при помощи аппаратных элементов вычислительного блока 1 системы контроля давления шины.
Дополнительно, чтобы ограничить влияние оценки массы Ме, способ предусматривает применение вычислительным блоком 1 фильтра Калмана, показанного на фиг. 5, который, на основании измеренных данных, таких как температура Tm и частоты колебаний Fm1, Fm2, а также искаженных данных, таких как оценочная масса Ме, позволяет определить скорректированные частоты колебаний и, следовательно, скорректированное давление Рс.
Вычислительный блок 1 выполнен с возможностью применения других алгоритмов, отличных от фильтра Калмана, для определения этих скорректированных частот, например, математических функций линейной или кубической интерполяции или методов коррекции на основе касательной.
Настоящее изобретение не ограничивается описанным вариантом осуществления и охватывает различные версии и обобщения, охватываемые нижеследующей формулой изобретения.


Изобретение относится к способу и системе контроля давления шины, смонтированной на ободе колеса эксплуатируемого транспортного средства. Способ содержит этапы, на которых: измеряют температуру (Tm) непосредственной окружающей среды транспортного средства; производят оценку массы (Me) транспортного средства; измеряют по меньшей мере первую частоту колебаний (Fm1) шины в первом частотном диапазоне и вторую частоту колебаний (Fm2) шины во втором частотном диапазоне и определяют давление (Рс) шины в зависимости от измеренных первой (Fm1) и второй (Fm2) частот колебаний и температуры (Tm), а также от оценочной массы (Me) транспортного средства. Технический результат – повышение надежности и точности контроля давления шины. 3 н. и 7 з.п. ф-лы, 5 ил.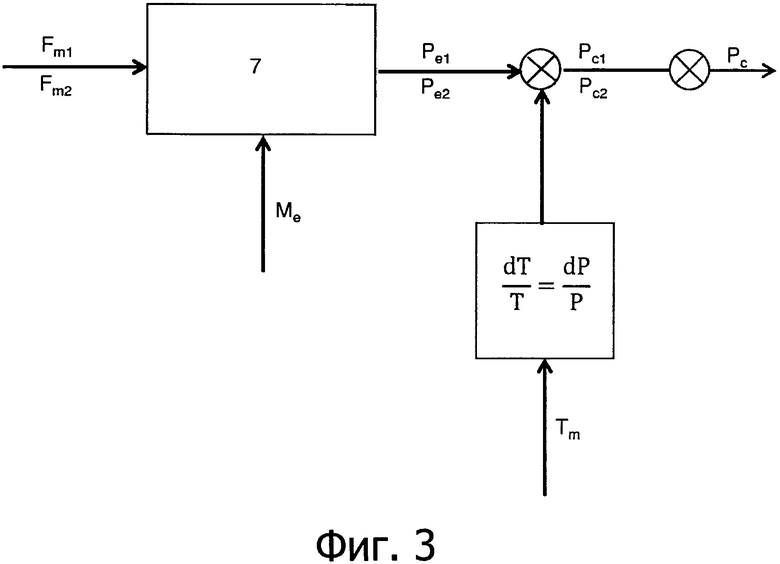
1. Способ контроля давления шины, смонтированной на ободе колеса эксплуатируемого транспортного средства, содержащий этапы, на которых:
- измеряют температуру (Tm) непосредственной окружающей среды транспортного средства;
- производят оценку массы (Ме) транспортного средства;
- измеряют по меньшей мере первую частоту колебаний (Fm1) шины в первом частотном диапазоне и вторую частоту колебаний (Fm2) шины во втором частотном диапазоне, и
- определяют давление (Рс) шины в зависимости от измеренных первой (Fm1) и второй (Fm2) частот колебаний и температуры (Tm), а также от оценочной массы (Ме) транспортного средства.
2. Способ по п. 1, отличающийся тем, что определение давления шины включает в себя этапы, на которых:
- выбирают из контрольных данных (7) контрольные частоты колебаний, связанные с давлениями шины и входящие в первый частотный диапазон и во второй частотный диапазон, и
- для первой (Fm1) и второй (Fm2) измеренных частот колебаний, соответствующих первой и второй контрольным частотам, определяют первое оценочное давление (Pe1) и второе оценочное давление (Ре2) шины.
3. Способ по п. 2, отличающийся тем, что этап выбора контрольных частот колебаний осуществляют в зависимости от измеренной температуры (Tm) и/или от оценочной массы (Ме).
4. Способ по п. 2, отличающийся тем, что этап определения давления (Рс) шины обеспечивает коррекцию первого (Pe1) и второго (Ре2) оценочных давлений для получения первого (Pc1) и второго (Pc2) скорректированных давлений в зависимости от изменения температуры между измеренной температурой (Tm) и предыдущей измеренной температурой.
5. Способ по п. 4, отличающийся тем, что этап определения включает в себя этап обработки первого (Pc1) и второго (Рс2) скорректированных давлений, относящихся к первой (Fm1) и второй (Fm2) измеренным частотам колебаний.
6. Способ по п. 2, отличающийся тем, что первая (Fm1) и вторая (Fm2) измеренные частоты колебаний и контрольные частоты колебания связаны с вибрациями, исходящими от:
- боковины шины, которая подвергается деформации типа кручения;
- протектора, который подвергается деформациям, поперечным по отношению к направлению движения транспортного средства, и/или
- части шины, которая подвергается трехмерным деформациям.
7. Способ по п. 1, отличающийся тем, что этап определения давления (Рс) осуществляют при помощи фильтра Калмана.
8. Способ по п. 1, отличающийся тем, что содержит этап передачи тревожного сигнала водителю транспортного средства в зависимости от обнаружения изменения давления шины.
9. Система контроля давления шины, содержащая вычислительный блок (1), связанный с датчиками (4, 5) данных, и аппаратные и программные элементы для осуществления способа по любому из пп. 1-8, при этом аппаратные элементы включают в себя модуль (2) памяти, содержащий контрольные данные (7).
10. Транспортное средство, содержащее систему контроля давления шины по п. 9.
| WO 0225291 A2, 28.03.2002 | |||
| Счетно-распределительное устройство для ниткошвейной машины | 1955 |
|
SU103953A1 |
| US 2005076987 A1, 14.04.2005. | |||

