Изобретение касается способа настройки датчиков визуализации согласно ограничительной части п. 1 формулы изобретения, системы с памятью и процессором для настройки датчиков визуализации согласно ограничительной части п. 9 формулы изобретения, системы настройки датчиков согласно ограничительной части п. 17 формулы изобретения и установки согласно ограничительной части п. 25 формулы изобретения.
При настройке датчиков визуализации, таких как, например, датчики подсчета пассажиров или камеры наблюдения, установок, например, транспортных средств для перевозки пассажиров, в частности в рельсовом и дорожном сообщении, или устройств для контроля помещений, как правило, необходима настройка датчика экспертом, чтобы обеспечить функционально правильное позиционирование и ориентацию датчика (например, при этом датчик подсчета функционально правильно ориентирован на линию подсчета), гарантировать правильную конфигурацию с помощью наборов параметров (например, запись с помощью видеокамеры, имеющей требуемое разрешение и частоту кадров) и функционально надежное калибрование с помощью сетевых и шинными системами. В контексте разработки, изготовления, пусконаладки и технического обслуживания (коротко: инжиниринга) сложных технических систем, таких как, например, транспортные средства в рельсовом составе (поезд), привлечение таких экспертов дорого.
Также в случае, когда должны строиться несколько одинаковых установок (например, несколько конструктивно одинаковых поездов одного и того же парка), такое привлечение экспертов является по сути избыточным, потому что всегда должна производиться одинаковая настройка.
На практике оказалось, что эта одинаковая настройка датчиков в нескольких конструктивно одинаковых установках постоянно бывает неудачной. Это объясняется, с одной стороны, ошибками по рассеянности экспертов или же недостаточным выполнением инструкций по настройке монтажниками.
Наконец, оказывается, что датчики при текущей эксплуатации вследствие работ по техническому обслуживанию, вандализма или усталости материалов соскальзывают с держателей или же снабжаются неправильными параметрами при обновлении программного обеспечения. В этом случае соответствующий датчик при определенных обстоятельствах уже не может правильно выполнять свою функцию.
До сих пор эта проблема решалась, прежде всего, с помощью подробных методических инструкций по настройке и конфигурации, с помощью регулярной визуальной проверки монтажа или с помощью регулярного, выполняемого вручную анализа получаемого материала изображения.
Помимо известных случаев неправильной настройки, следует иметь в виду «неизвестное количество» неправильных настроек, которые незаметны при текущей эксплуатации, например, датчиков подсчета пассажиров, которые, хотя и дают неправильные показания подсчета, но именно не настолько неправильные показания подсчета, чтобы они были заметны при текущей эксплуатации.
Лежащая в основе изобретения задача заключается в том, чтобы предложить способ настройки датчиков визуализации, систему с памятью и процессором для настройки датчиков визуализации, систему настройки датчиков и установку, с помощью которого или, соответственно, которых настройка, в частности в целях пусконаладки и технического обслуживания, датчиков визуализации, таких как, например, датчики подсчета пассажиров и камеры наблюдения, упрощается в отношении связанных с ней усилий и оптимизируется в отношении связанных с ней затрат.
Эта задача решается, исходя из определенного в ограничительной части п.1 формулы изобретения способа настройки датчиков визуализации с помощью признаков, указанных в отличительной части п.1 формулы изобретения.
Помимо этого, задача решается, исходя из определенной в ограничительной части п.9 формулы изобретения системы с памятью и процессором для настройки датчиков визуализации с помощью признаков, указанных в отличительной части п.9 формулы изобретения.
Также задача решается, исходя из определенной в ограничительной части п.17 формулы изобретения системы настройки датчиков с помощью признаков, указанных в отличительной части п. 17 формулы изобретения.
Кроме того, задача решается, исходя из определенной в ограничительной части п. 25 формулы изобретения установки с помощью признаков, указанных в отличительной части п. 25 формулы изобретения.
Идея, лежащая в основе изобретения в соответствии с независимыми пп. 1, 9, 17 и 25 формулы изобретения, заключается в том, чтобы путем сверки действительного отдельного изображения или действительного видео датчика визуализации, который правильно настроен и сверен в отношении либо отличительной информации датчика, либо связанной с техникой подключения информации о порте и характерной для конкретного датчика референтной ситуации, что касается позиционирования, ориентации, конфигурации референтного набора параметров, а также связанного с техникой передачи данных и электрического подсоединения, и с помощью которого было снято по меньшей мере одно референтное отдельное изображение или референтное видео, на котором в каждом случае локализуется маркировка, с помощью маркированного референтного отдельного изображения или референтного видео проверять, правильно ли ориентирован, конфигурирован и кабелирован этот настроенный датчик визуализации.
Если это не так, в ходе первой сверочной проверки генерируется первое сообщение об ошибке или первое сообщение об ошибке и результирующий из сверки набора параметров, скорректированный, правильный набор параметров, а также, с другой стороны, в ходе второй сверочной проверки второе сообщение об ошибке.
Чтобы можно было распознавать неправильную ориентацию датчика, неправильные наборы параметров и неправильное каблирование, в соответствии с вышеуказанной идеей следует поступать следующим образом.
Сначала для референтной установки (например, первое транспортное средство в рельсовом составе (поезде) парка поездов) регистрируются возможные ситуации монтажа датчиков визуализации, экспертом задается правильное позиционирование, ориентация, конфигурация с помощью наборов параметров и каблирование.
Затем с помощью этой уставки настраиваются датчики в референтной установке, и правильная настройка проверяется экспертом. После этого для этих датчиков сохраняются в памяти характерные ситуации монтажа и выбранный набор параметров, и снимаются несколько референтных отдельных изображений и референтных видео, при необходимости при различных условиях света и внешних условиях, которые могут возникать при эксплуатации.
Наконец, на этих референтных отдельных изображениях или референтных видео маркируются выделяющиеся объекты, которые отличают ситуации монтажа и на референтных отдельных изображениях или, соответственно, референтных видео должны всегда возникать в одном и том же месте, например, на поручнях в поездах. В случае если таких объектов нет, в установках, где находятся датчики визуализации, могли бы также искусственно наноситься маркировки (например, красные точки).
Затем для следующей конструктивно одинаковой установки датчики сначала настраиваются в соответствии с уставкой эксперта. После этого предлагаемый изобретением способ настройки датчиков визуализации, система с памятью и процессором для настройки датчиков визуализации согласно изобретению, которая может быть компьютерным программным продуктом и/или предлагаемая изобретением система настройки датчиков применяется для проверки настройки любого датчика. При этом сначала принимается, что датчик был настроен правильно. Затем возможно соответствующее обращение к этому датчику в связи с каблированием или набором параметров в соответствии со способом, системой с памятью и процессором и/или системой настройки датчиков.
Затем на первом этапе проверяется, сообщаются ли датчиком правильный действительный Id датчика или правильный действительный тип датчика. Это происходит сначала путем сверки с заложенным номинальным Id датчика и/или заложенным номинальным типом. Если датчик не знает своего действительного Id или своего действительного типа, то осуществляется сверка по правильному, связанному с техникой подключения действительному номеру порта с номинальным номером порта.
Затем на втором этапе проверяется, совпадает ли сообщаемый датчиком, конфигурированный действительный набор параметров с номинальным набором параметров, требуемым в связи с ситуацией монтажа и при необходимости с типом датчика. Если нет, в сопряженную систему пусконаладки / технического обслуживания и/или в датчик сбрасывается первое сообщение об ошибке. Параллельно этому опционально в датчик может также передаваться скорректированный, правильный набор параметров путем соответствующей установки в датчик либо непосредственно, либо опосредованно через систему пусконаладки / технического обслуживания.
Затем на третьем этапе выдаваемые датчиком действительные отдельные изображения или действительные видео сравниваются с точки зрения локализованных на них маркировок (выделяющиеся объекты или искусственные маркировки). Если они не находятся в предусмотренных местах, то, в одном случае, датчик соскользнул, неправильно кабелирован или неправильно смонтирован. В этом случае в систему пусконаладки/технического обслуживания или датчик подается второе сообщение об ошибке. Так как сообщения об ошибках не являются стандартным случаем, эти ошибки могут затем корректироваться вручную. Возможные неправильные сообщения об ошибках тоже могут корректироваться вручную.
В одном из усовершенствованных вариантов осуществления изобретения способ, система с памятью и процессором и/или система настройки датчиков могут применяться для наблюдения за настройкой датчика также при текущей эксплуатации. Это целесообразно, например, тогда, когда в связи с окружением или техническим обслуживанием может ожидаться изменение настройки датчиков (например, из-за соскальзывания датчика, из-за обновления программного обеспечения). В этом случае референтные отбельные изображения или референтные видео снимали бы только для того датчика, который был настроен, и не применяли бы их для других датчиков.
В другом расширенном варианте изобретения при аналитической обработке отдельных изображений или видео может также рассматриваться контекст установки (например, транспортного средства в рельсовом составе (поезде)), в котором находятся датчики, например, открыты ли или закрыты в данный момент двери поезда или включен ли или выключен в данный момент свет и пр.
В одном из дополнительных расширенных вариантов изобретения неудовлетворительная ориентация датчиков визуализации могла бы компенсироваться интеллектуальным программным обеспечением, т.е. производиться перерасчет полученного материала изображения. Например, датчики подсчета пассажиров часто могут просматривать область большего размера, чем необходимо для подсчета. В этом случае неправильная ориентация может компенсироваться рассмотрением смещенного на эту неправильную ориентацию фрагмента изображения (предполагается, что речь идет об умеренных неправильных ориентациях).
В одном из выходящих за эти рамки расширенных вариантов изобретения эта концепция могла бы принципиально распространяться на датчики всех видов. Однако тогда при необходимости должно было бы оказываться влияние на факторы окружения. Например, для проверки микрофона можно было бы устанавливать аудиоряды, которые затем могут проверяться на правильное восприятие с помощью микрофона. Тем самым можно было бы проверять как системы громкой связи, так и микрофоны (например, в переговорном пункте).
С помощью показанного выше сравнения ситуаций монтажа, наборов параметров и референтных отдельных изображений или референтных видео с соответствующей действительной ситуацией может достигаться, что:
- автоматизированным образом могут распознаваться ошибки в настройке датчиков визуализации при многократном применении в конструктивно одинаковых установках;
- автоматизированным образом могут распознаваться ошибки вследствие изменения настройки при текущей эксплуатации.
Другие преимущества изобретения следуют из последующего описания одного из примеров осуществления изобретения с помощью единственной фигуры.
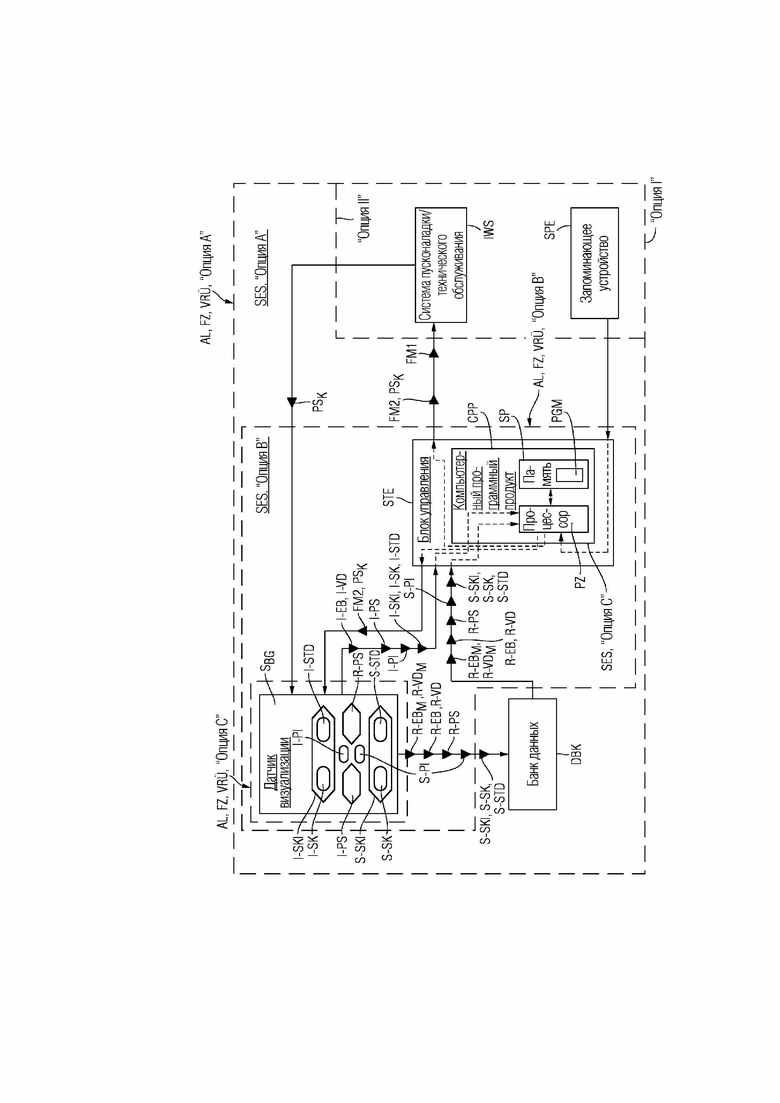
На этой фигуре показана система настройки датчиков для настройки датчиков визуализации в установке, например, транспортном средстве для перевозки пассажиров, в частности в рельсовом и дорожном сообщении, или устройстве для контроля помещений.
На фигуре показана система SES настройки датчиков для настройки датчиков визуализации в установке AL, например, транспортном средстве FZ для перевозки пассажиров, в частности в рельсовом и дорожном сообщении, или устройстве VRÜ для контроля помещений. Эта система SES настройки датчиков содержит в соответствии с «опцией A» на фигуре по меньшей мере один датчик SBG визуализации и банк DBK данных, который соединен с датчиком SBG визуализации, и блок STE управления, который соединен с датчиком SBG визуализации и банком DBK данных. Названные компоненты системы принадлежат при этом также в соответствии с «опцией A» установке AL, транспортному средству FZ или устройству VRÜ для контроля помещения.
Датчик SBG визуализации представляет собой предпочтительно датчик подсчета пассажиров или камеру наблюдения, имеющую номинальную отличительную информацию S-SKI датчика, которая получается, например, из конфигурированной номинальной метки S-SK датчика и/или конфигурированных номинальных данных о S-STD типе датчика, и связанную с техникой подключения номинальную информацию S-PI о порте. В этой связи и в отношении характерной для конкретного датчика референтной ситуации, что касается позиционирования, ориентации, конфигурации референтного набора R-PS параметров, а также связанного с техникой передачи данных и электрического подсоединения датчик SBG визуализации настроен правильно.
Характерная для конкретного датчика референтная ситуация, что касается позиционирования, ориентации, конфигурации референтного набора R-PS параметров, связанного с техникой передачи данных и электрического подсоединения, а также правильной настройки датчика SBG визуализации, имеется в установке AL, предпочтительно в транспортном средстве FZ для перевозки пассажиров, имеющем датчики подсчета пассажиров, например, в рельсовом и дорожном сообщении, или в устройстве VRÜ для контроля помещений, имеющем камеры наблюдения.
С помощью настроенного таким образом датчика SBG визуализации снимается в каждом случае по меньшей мере одно референтное отдельное изображение R-EB или референтное видео R-VD.
Каждое снятое так референтное отдельное изображение R-EB или референтное видео R-VD вместе с референтным набором R-PS параметров, номинальной отличительной информацией S-SKI, S-SK, S-STD датчика и связанной с техникой подключения номинальной информацией S-PI о порте доставляется датчиком SBG визуализации в банк DBK данных и сохраняется в нем.
Помимо этого, датчик SBG визуализации выполнен применительно к программному и аппаратному обеспечению таким образом, что на снятом референтном отдельном изображении R-EB или, соответственно, референтном видео R-VD локализируется касающаяся по меньшей мере одного выделяющегося объекта маркировка или созданная для характерной для конкретного датчика референтной ситуации для съемки референтного отдельного изображения R-EB или референтного видео R-VD искусственная маркировка, и снабженное этой маркировкой референтное отдельное изображение R-EBM или референтное видео R-VDM, в свою очередь, доставляется в банк DBK данных и сохраняется в нем.
Для настройки датчика SBG визуализации он образует вместе с банком DBK данных один общий функциональный блок, имеющий блок STE управления. Этот блок STE управления содержит для этой цели и для формирования функционального блока систему с памятью и процессором CPP для настройки датчиков визуализации, которая может быть, например, реализована как компьютерный программный продукт, с энергонезависимой, считываемой памятью SP, в которой сохранены считываемые процессором команды управляющей программы осуществляющего настройку программного модуля PGM, и соединенным с памятью SP процессором PZ, который выполняет команды управляющей программы программного модуля PGM для настройки датчиков визуализации.
При этом наличие настройки датчика SBG визуализации при полученном и сформированном таким образом функциональном блоке проверяется следующим образом.
На первом этапе, как бы в качестве подготовки, для осуществления этой проверки настроенного датчика SBG визуализации снабженное маркировкой референтное отдельное изображение R-EBM или, соответственно, референтное видео R-VDM, референтный набор R-PS параметров, номинальная отличительная информация S-SKI, S-SK, S-STD датчика и связанная с техникой подключения номинальная информация S-PI о порте загружаются в процессор PZ.
После этого на втором этапе осуществляется проверка настроенного датчика SBG визуализации, при этом
- загруженная в процессор PZ действительная отличительная информация I-SKI датчика визуализации, которая предпочтительно и по аналогии с номинальной отличительной информацией S-SKI, S-SK, S-STD датчика получается из конфигурированной действительной метки I-SK датчика и/или конфигурированных действительных данных I-STD о типе датчика, сверяется с номинальной отличительной информацией S-SKI, S-SK, S-STD датчика из банка DBK данных, или загруженная в процессор PZ связанная с техникой подключения действительная информация I-PI о порте со связанной с техникой подключения номинальной информацией S-PI о порте из банка DBK данных,
- загруженный в процессор PZ действительный набор I-PS параметров датчика SBG визуализации сверяется с референтным набором R-PS параметров из банка DBK данных,
- по меньшей мере одно загруженное в процессор PZ действительное отдельное изображение I-EB или действительное видео I-VD датчика SBG визуализации сверяется с точки зрения соответствующей маркировки с соответствующим, имеющим маркировку референтным отдельным изображением R-EBM или, соответственно, референтным видео R-VDM.
Когда эти проверки закончены,
1) генерируется первое сообщение FM1 об ошибке или первое сообщение FM1 об ошибке и результирующий из сверки набора параметров, скорректированный, правильный набор PSK параметров, если сверочная проверка в соответствии со вторым тире или первым и вторым тире не дает совпадения между действительным набором I-PS параметров и референтным набором R-PS параметров, и
2) генерируется второе сообщение FM2 об ошибке, если сверочная проверка в соответствии с третьим тире показывает, что маркировка на действительном отдельном изображении I-EB или, соответственно, действительном видео I-VD и маркировка на референтном отдельном изображении R-EBM или, соответственно, референтном видео R-VDM по существу не находятся в одинаковом месте на данном отдельном изображении или, соответственно, видео.
Генерированные блоком STE управления сообщения FM1, FM2 об ошибках и при необходимости дополнительно генерированный, скорректированный, правильный набор PSK параметров в целях пусконаладки и технического обслуживания передаются в систему IWS пусконаладки / технического обслуживания, которая для этого соединена с блоком STE управления. При этом скорректированный, правильный набор PSK параметров может устанавливаться либо непосредственно из блока STE управления, либо опосредованно через систему IWS пусконаладки/технического обслуживания в настроенный датчик SBG визуализации для корректировки набора параметров.
Теперь эта система IWS пусконаладки/технического обслуживания может либо, в соответствии с «опцией I» на фигуре, принадлежать системе SES настройки датчиков и вместе с тем установке AL, предпочтительно транспортному средству FZ или устройству VRÜ для контроля помещений, либо она, в соответствии с «опцией II» на фигуре, не является составной частью системы SES настройки датчиков и вместе с тем также не является составной частью установки AL, транспортного средства FZ или устройства VRÜ для контроля помещений.
В то время как с помощью первого сообщения FM1 об ошибке сигнализируется о расхождении между действительным набором I-PS параметров и референтным набором R-PS параметров, второе сообщение FM2 об ошибке служит для того, чтобы сигнализировать и отображать неправильную настройку / неправильную ориентацию датчика SBG визуализации.
При этом неправильная настройка/неправильная ориентация датчика SBG визуализации возникает, например, из-за соскальзывания датчика, неправильного связанного с техникой передачи данных и электрического соединения датчика, например, из-за неправильного каблирования или монтажа, неудовлетворительной ориентации датчика или еще не осуществленного обновления программного обеспечения.
Неправильная настройка/неправильная ориентация датчика может компенсироваться предпочтительно либо загружаемым в датчик SBG визуализации или уже предварительно инсталлированным интеллектуальным программным обеспечением, которое, например, может быть выполнено в виде «приложения», при этом выдаваемый датчиком SBG визуализации материал изображения подвергается перерасчету, либо - в случае датчиков подсчета пассажиров или камер наблюдения в качестве датчика SBG визуализации, которые часто покрывают область большего размера, чем необходимо ему для подсчета или, соответственно, наблюдения - путем рассмотрения фрагмента изображения, смещенного на эту неправильную настройку/неправильную ориентацию.
Помимо этого, неправильная настройка/неправильная ориентация датчика SBG визуализации при названных причинах может всегда корректироваться вручную.
Дополнительно блок STE управления может быть еще соединен с запоминающим устройством SPE для сохранения информации, характерной для данного контекста установки. С этим запоминающим устройством SPE блок STE управления образует дополнительный общий функциональный блок и выполнен таким образом, что для проверки настроенного датчика SBG визуализации в установке AL, FZ, VRÜ учитывается контекст установки, в частности тип установки, например, рельсовое транспортное средство конструктивного ряда ICE 3, смонтированные в установке компоненты или подсистемы, состояние установки, например, режим эксплуатации, состояние компонента, например, открытие двери.
Для запоминающего устройства SPE в отношении принадлежности к установке имеет силу то же, что для системы IWS пусконаладки/технического обслуживания. Следовательно, запоминающее устройство SPE может также снова либо, в соответствии с «опцией I» на фигуре, принадлежать системе SES настройки датчиков и вместе с тем установке AL, предпочтительно транспортному средству FZ или устройству VRÜ для контроля помещений, либо оно, в соответствии с «опцией II» на фигуре, не является составной частью системы SES настройки датчиков и вместе с тем также не является составной частью установки AL, транспортного средства FZ или устройства VRÜ для контроля помещений.
Наряду с вышеописанной системой SES настройки датчиков в соответствии с «опцией A» в установке AL, транспортном средстве FZ или устройстве VRÜ для контроля помещений в соответствии с «опцией A» согласно фигуре возможно также, чтобы
- в системе SES настройки датчиков в соответствии с «опцией B» содержались указанный по меньшей мере один датчик SBG визуализации и блок STE управления, которые при этом принадлежат установке AL, транспортному средству FZ или устройству VRÜ для контроля помещений в соответствии с «опцией B»;
- в системе SES настройки датчиков в соответствии с «опцией C» содержался система с памятью и процессором CPP блока STE управления, и установке AL, транспортному средству FZ или устройству VRÜ для контроля помещений в соответствии с «опцией C» принадлежал исключительно указанный по меньшей мере один датчик SBG визуализации.
При «опции A» и «опции B» реализуемая применительно к программному обеспечению проверка настроенного датчика SBG визуализации происходит в установке AL, транспортном средстве FZ или устройстве VRÜ для контроля помещений, в отличие от чего при «опции C» реализуемая применительно к программному обеспечению проверка настроенного датчика SBG визуализации происходит вне установки AL, транспортного средства FZ или устройства VRÜ для контроля помещений, например, в облаке, в котором инсталлирована система с памятью и процессором CPP или, соответственно, работает соответствующее программное обеспечение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИЗУАЛИЗАЦИЯ ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА | 2005 |
|
RU2383919C2 |
| КАТУШКА ДЛЯ ВИЗУАЛИЗАЦИИ МЕТОДОМ МАГНИТОИНДУКЦИОННОЙ ТОМОГРАФИИ | 2014 |
|
RU2617270C1 |
| ВИЗУАЛИЗАЦИЯ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ В КОМБИНАЦИИ С ДВУМЕРНЫМИ ПРОЕКЦИОННЫМИ ИЗОБРАЖЕНИЯМИ | 2007 |
|
RU2471239C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБЪЕМНОЙ ВИЗУАЛИЗАЦИИ НАБОРОВ ДАННЫХ | 2008 |
|
RU2497194C2 |
| СПОСОБ НАСТРОЙКИ ДЛЯ НАСТРОЙКИ УСТАНОВКИ ДЛЯ АНАЛИТИЧЕСКОГО СПОСОБА | 2020 |
|
RU2825596C1 |
| ВИЗУАЛИЗАЦИЯ ДЛЯ НАВИГАЦИОННОГО УКАЗАНИЯ | 2012 |
|
RU2594811C2 |
| СПОСОБ ИНТРАОПЕРАЦИОННОЙ ВИЗУАЛИЗАЦИИ ПАТОЛОГИЧЕСКИХ ОЧАГОВ | 2012 |
|
RU2544094C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ВИЗУАЛИЗАЦИИ ПАЦИЕНТОВ С ПЕРСОНАЛЬНЫМ МЕДИЦИНСКИМ УСТРОЙСТВОМ | 2010 |
|
RU2534393C2 |
| ОПТИЧЕСКИЕ АГЕНТЫ ВИЗУАЛИЗАЦИИ | 2008 |
|
RU2475266C2 |
| УСТРОЙСТВО ВОСПРОИЗВЕДЕНИЯ, СПОСОБ ЗАПИСИ, СИСТЕМА ВОСПРОИЗВЕДЕНИЯ НОСИТЕЛЯ ЗАПИСИ | 2010 |
|
RU2522304C2 |
Заявленная группа изобретений относится к области настройки датчиков визуализации. Технический результат заключается в упрощении настройки датчиков визуализации во время пусконаладки. Группа изобретений включает в себя систему настройки датчиков, способ, содержащий сверку действительного отдельного изображения (I-EB) или действительного видео (I-VD) датчика (SBG) визуализации, который правильно настроен и сверен в отношении либо отличительной информации датчика, с помощью которого было снято по меньшей мере одно референтное отдельное изображение (R-EB) или референтное видео (R-VD), на котором в каждом случае локализуется маркировка, с помощью маркированного референтного отдельного изображения (R-EBM) или референтного видео (R-VDM) проверять, правильно ли ориентирован, конфигурирован и кабелирован этот настроенный датчик (SBG) визуализации. Если это не так, в ходе первой сверочной проверки генерируется сообщение об ошибке и скорректированный, правильный набор (PSK) параметров, а также, с другой стороны, в ходе второй сверочной проверки второе сообщение (FM) об ошибке. 5 н. и 22 з.п. ф-лы, 1 ил.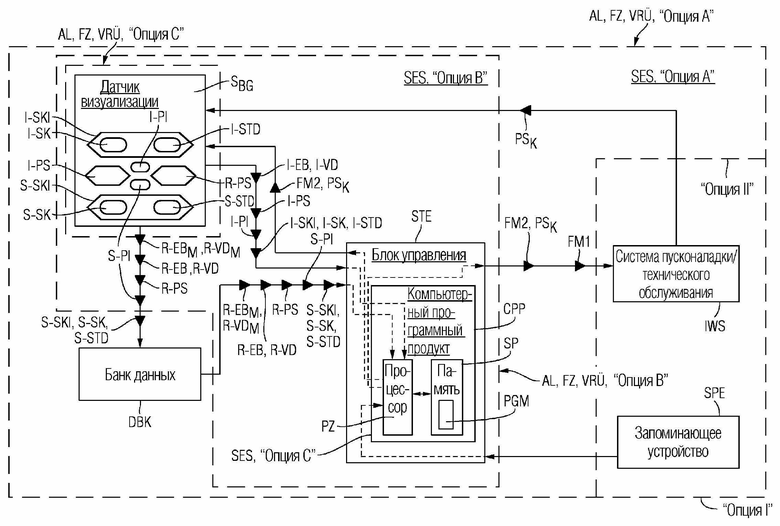
1. Способ настройки датчиков визуализации, в котором
a) по меньшей мере один датчик (SBG) визуализации, такой как, например, датчик подсчета пассажиров или камера наблюдения, имеющий номинальную отличительную информацию (S-SKI) датчика, в частности, полученную из конфигурированной номинальной метки (S-SK) датчика и/или конфигурированных номинальных данных (S-STD) о типе датчика и связанную с техникой подключения номинальную информацию (S-PI) о порте, который настроен правильно в отношении характерной для конкретного датчика референтной ситуации, что касается позиционирования, ориентации, конфигурации референтного набора (R-PS) параметров, а также связанного с техникой передачи данных и электрического подсоединения, снимает соответственно по меньшей мере одно референтное отдельное изображение (R-EB) или референтное видео (R-VD),
b) снятое референтное отдельное изображение (R-EB) или, соответственно, референтное видео (R-VD), референтный набор (R-PS) параметров, номинальную отличительную информацию (S-SKI, S-SK, S-STD) датчика и связанную с техникой подключения номинальную информацию (S-PI) о порте сохраняют,
отличающийся тем, что
c) на снятом референтном отдельном изображении (R-EB) или, соответственно, референтном видео (R-VD) локализуют по меньшей мере одну касающуюся выделяющегося объекта маркировку или искусственную маркировку, созданную для характерной для конкретного датчика референтной ситуации для съемки референтного отдельного изображения (R-EB) или, соответственно, референтного видео (R-VD), и снабженное маркировкой референтное отдельное изображение (R-EBM) или референтное видео (R-VDM) сохраняют,
d) осуществляют проверку настроенного датчика (SBG) визуализации, тем, что
d1) действительную отличительную информацию (I-SKI) датчика упомянутого датчика (SBG) визуализации, в частности полученную из конфигурированной действительной метки (I-SK) датчика и/или конфигурированных действительных данных (I-STD) о типе датчика, сверяют с номинальной отличительной информацией (S-SKI, S-SK, S-STD) датчика, или связанную с техникой подключения действительную информацию (I-PI) о порте сверяют со связанной с техникой подключения номинальной информацией (S-PI) о порте,
d2) действительный набор (I-PS) параметров датчика (SBG) визуализации сверяют с референтным набором (R-PS) параметров,
d3) по меньшей мере одно действительное отдельное изображение (I-EB) или действительное видео (I-VD) датчика (SBG) визуализации в отношении соответствующей маркировки сверяют с соответствующим, имеющим маркировку референтным отдельным изображением (R-EBM) или, соответственно, референтным видео (R-VDM),
e) генерируют первое сообщение (FM1) об ошибке или первое сообщение (FM1) об ошибке и результирующий из сверки набора параметров, скорректированный, правильный набор (PSK) параметров, если сверочная проверка в соответствии с признаком d2) или признаками d1) и d2) не дает совпадения между действительным набором (I-PS) параметров и референтным набором (R-PS) параметров,
f) генерируют второе сообщение (FM2) об ошибке, если сверочная проверка в соответствии с признаком d3) показывает, что маркировка на действительном отдельном изображении (I-EB) или, соответственно, действительном видео (I-VD) и маркировка на референтном отдельном изображении (R-EBM) или, соответственно, референтном видео (R-VDM) по существу не находятся в одинаковом месте на соответствующем отдельном изображении или, соответственно, видео.
2. Способ по п. 1, отличающийся тем, что
способ применяют в целях пусконаладки и технического обслуживания, и сообщения (FM1, FM2) об ошибках и при необходимости скорректированный, правильный набор (PSK) параметров передают в систему (IWS) пусконаладки/технического обслуживания, причем в настроенный датчик (SBG) визуализации вводят скорректированный, правильный набор (PSK) параметров, тем, что набор параметров устанавливается в датчик.
3. Способ по п. 1 или 2, отличающийся тем, что
с помощью второго сообщения (FM2) об ошибке сигнализируют о неправильной настройке/неправильной ориентации датчика (SBG) визуализации.
4. Способ по п. 3, отличающийся тем, что
неправильную настройку/неправильную ориентацию датчика (SBG) визуализации корректируют вручную.
5. Способ по п. 3, отличающийся тем, что
неправильная настройка/неправильная ориентация датчика (SBG) визуализации возникает вследствие изменения позиционирования, например из-за сдвига датчика, неправильного связанного с техникой передачи данных и электрического подсоединения упомянутого датчика, например из-за неправильного каблирования или монтажа, неудовлетворительной ориентации датчика или еще не осуществленного обновления программного обеспечения.
6. Способ по п. 5, отличающийся тем, что
неправильную настройку/неправильную ориентацию датчика (SBG) визуализации вследствие неудовлетворительной ориентации датчика компенсируют либо интеллектуальным программным обеспечением датчика (SBG) визуализации, тем, что выдаваемый датчиком (SBG) визуализации материал изображения подвергается перерасчету, либо - в случае датчиков подсчета пассажиров или камер наблюдения в качестве датчика (SBG) визуализации, которые часто покрывают область большего размера, чем необходимо ему для подсчета или, соответственно, для наблюдения - путем рассмотрения фрагмента изображения, смещенного на неправильную настройку/неправильную ориентацию.
7. Способ по любому из пп. 1-6, отличающийся тем, что
характерная для конкретного датчика референтная ситуация, что касается позиционирования, ориентации, конфигурации референтного набора (R-PS) параметров, а также связанного с техникой передачи данных и электрического подсоединения, а также правильной настройки датчика (SBG) визуализации, имеет место в установке (AL), в частности транспортном средстве (FZ) для перевозки пассажиров, имеющем датчики подсчета пассажиров, например в рельсовом и дорожном сообщении, или устройстве (VRÜ) для контроля помещений, имеющем камеры наблюдения.
8. Способ по п. 7, отличающийся тем, что
для проверки настроенного датчика (SBG) визуализации в установке (AL, FZ, VRÜ) учитывают контекст установки, в частности тип установки, например рельсовое транспортное средство конструктивного ряда ICE 3, смонтированные в установке (AL, FZ, VRÜ) компоненты или подсистемы, состояние установки, например режим эксплуатации, состояние компонента, например открытие двери.
9. Система с памятью и процессором (CPP) для настройки датчиков визуализации (SES в соответствии с «опцией C»), содержащая энергонезависимую, считываемую память (SP), в которой сохранены считываемые процессором команды управляющей программы осуществляющего настройку программного модуля (PGM), и соединенный с памятью (SP) процессор (PZ), который выполняет команды управляющей программы программного модуля (PGM) для настройки датчиков визуализации,
отличающаяся тем, что
a) для загрузки материала изображения в процессор (PZ)
a1) по меньшей мере одним датчиком (SBG) визуализации, таким как, например, датчик подсчета пассажиров или камера наблюдения, имеющим номинальную отличительную информацию (S-SKI) датчика, в частности, полученную из конфигурированной номинальной метки (S-SK) датчика и/или конфигурированных номинальных данных (S-STD) о типе датчика и связанную с техникой подключения номинальную информацию (S-PI) о порте, который настроен правильно в отношении характерной для конкретного датчика референтной ситуации, что касается позиционирования, ориентации, конфигурации референтного набора (R-PS) параметров, а также связанного с техникой передачи данных и электрического подсоединения, снимается соответственно по меньшей мере одно референтное отдельное изображение (R-EB) или референтное видео (R-VD),
a2) снятое референтное отдельное изображение (R-EB) или, соответственно, референтное видео (R-VD), референтный набор (R-PS) параметров, номинальная отличительная информация (S-SKI, S-SK, S-STD) датчика и связанная с техникой подключения номинальная информация (S-PI) о порте сохраняются,
a3) на снятом референтном отдельном изображении (R-EB) или, соответственно, референтном видео (R-VD) локализуется по меньшей мере одна касающаяся выделяющегося объекта маркировка или искусственная маркировка, созданная для характерной для конкретного датчика референтной ситуации для съемки референтного отдельного изображения (R-EB) или, соответственно, референтного видео (R-VD), и снабженное маркировкой снятое референтное отдельное изображение (R-EBM) или референтное видео (R-VDM) сохраняется,
b) для осуществления проверки настроенного датчика (SBG) визуализации снабженное маркировкой референтное отдельное изображение (R-EBM) или, соответственно, референтное видео (R-VDM), референтный набор (R-PS) параметров, номинальная отличительная информация (S-SKI, S-SK, S-STD) датчика и связанная с техникой подключения номинальная информация (S-PI) о порте загружаются в процессор (PZ),
c) процессор (PZ) и программный модуль (PGM) для осуществления проверки настроенного датчика (SBG) визуализации, имеющего референтное отдельное изображение (R-EBM) или, соответственно, референтное видео (R-VDM), референтный набор (R-PS) параметров, номинальную отличительную информацию (S-SKI, S-SK, S-STD) датчика, выполнены таким образом, что
c1) действительная отличительная информация (I-SKI) датчика упомянутого датчика (SBG) визуализации, в частности полученная из конфигурированной номинальной метки (S-SK) датчика и/или конфигурированных номинальных данных (S-STD) о типе датчика, сверяется с номинальной отличительной информацией (S-SKI, S-SK, S-STD) датчика, или связанная с техникой подключения действительная информация (I-PI) о порте сверяется со связанной с техникой подключения номинальной информацией (S-PI) о порте,
c2) загруженный в процессор (PZ) действительный набор (I-PS) параметров датчика (SBG) визуализации сверяется с референтным набором (R-PS) параметров,
c3) по меньшей мере одно загруженное в процессор (PZ) действительное отдельное изображение (I-EB) или действительное видео (I-VD) датчика (SBG) визуализации сверяется в отношении соответствующей маркировки с соответствующим, имеющим маркировку референтным отдельным изображением (R-EBM) или, соответственно, референтным видео (R-VDM),
d) генерируется первое сообщение (FM1) об ошибке или первое сообщение (FM1) об ошибке и результирующий из сверки набора параметров, скорректированный, правильный набор (PSK) параметров, если сверочная проверка в соответствии с признаком c2) или признаками c1) и c2) не дает совпадения между действительным набором (I-PS) параметров и референтным набором (R-PS) параметров,
e) генерируется второе сообщение (FM2) об ошибке, если сверочная проверка в соответствии с признаком c3) показывает, что маркировка на действительном отдельном изображении (I-EB) или, соответственно, действительном видео (I-VD) и маркировка на референтном отдельном изображении (R-EBM) или, соответственно, референтном видео (R-VDM) по существу не находятся в одинаковом месте на соответствующем отдельном изображении или, соответственно, видео.
10. Система (CPP) по п. 9, отличающаяся тем, что
процессор (PZ) и программный модуль (PGM) выполнены таким образом, что в целях пусконаладки и технического обслуживания сообщения (FM1, FM2) об ошибках и при необходимости скорректированный, правильный набор (PSK) параметров передаются в систему (IWS) пусконаладки/технического обслуживания, при этом скорректированный, правильный набор (PSK) параметров передается от процессора (PZ) или системы (IWS) пусконаладки/технического обслуживания в настроенный датчик (SBG) визуализации путем установки набора параметров в датчик.
11. Система (CPP) по п. 9 или 10, отличающаяся тем, что
с помощью второго сообщения (FM2) об ошибке сигнализируется о неправильной настройке/неправильной ориентации датчика (SBG) визуализации.
12. Система (CPP) по п. 11, отличающаяся тем, что
неправильная настройка/неправильная ориентация датчика (SBG) визуализации корректируется вручную.
13. Система (CPP) по п. 11, отличающаяся тем, что
неправильная настройка/неправильная ориентация датчика (SBG) визуализации возникает вследствие изменения позиционирования, например из-за соскальзывания датчика, неправильного связанного с техникой передачи данных и электрического подсоединения датчика, например из-за неправильного каблирования или монтажа, неудовлетворительной ориентации датчика или еще не осуществленного обновления программного обеспечения.
14. Система (CPP) по п. 13, отличающаяся тем, что
неправильная настройка/неправильная ориентация датчика (SBG) визуализации вследствие неудовлетворительной ориентации датчика компенсируется либо интеллектуальным программным обеспечением датчика (SBG) визуализации, тем, что выдаваемый датчиком (SBG) визуализации материал изображения подвергается перерасчету, либо - в случае датчиков подсчета пассажиров или камер наблюдения в качестве датчика (SBG) визуализации, которые часто покрывают область большего размера, чем необходимо ему для подсчета или, соответственно, наблюдения - путем рассмотрения фрагмента изображения, смещенного на неправильную настройку/неправильную ориентацию.
15. Система (CPP) по любому из пп. 9-14, отличающаяся тем, что
характерная для конкретного датчика референтная ситуация, что касается позиционирования, ориентации, конфигурации референтного набора (R-PS) параметров, связанного с техникой передачи данных и электрического подсоединения, а также правильной настройки датчика (SBG) визуализации, имеет место в установке (AL), в частности транспортном средстве (FZ) для перевозки пассажиров, имеющем датчики подсчета пассажиров, например в рельсовом и дорожном сообщении, или устройстве (VRÜ) для контроля помещений, имеющем камеры наблюдения.
16. Система (CPP) по п. 15, отличающаяся тем, что
процессор (PZ) и программный модуль (PGM) выполнены таким образом, что для проверки настроенного датчика (SBG) визуализации в установке (AL, FZ, VRÜ) учитывается контекст установки, в частности тип установки, например рельсовое транспортное средство конструктивного ряда ICE 3, смонтированные в установке (AL, FZ, VRÜ) компоненты или подсистемы, состояние установки, например режим эксплуатации, состояние компонента, например открытие двери.
17. Система (SES) настройки датчиков, которая
a) содержит по меньшей мере один датчик (SBG) визуализации, такой как, например, датчик подсчета пассажиров или камера наблюдения, имеющий номинальную отличительную информацию (S-SKI) датчика, в частности полученную из конфигурированной номинальной метки (S-SK) датчика и/или конфигурированных номинальных данных (S-STD) о типе датчика, и связанную с техникой подключения номинальную информацию (S-PI) о порте, который настроен правильно в отношении характерной для конкретного датчика референтной ситуации, что касается позиционирования, ориентации, конфигурации референтного набора (R-PS) параметров, а также связанного с техникой передачи данных и электрического подсоединения, снимает соответственно по меньшей мере одно референтное отдельное изображение (R-EB) или референтное видео (R-VD),
b) содержит соединенный с датчиком (SBG) визуализации банк (DBK) данных, в котором сохраняются снятое референтное отдельное изображение (R-EB) или, соответственно, референтное видео (R-VD), референтный набор (R-PS) параметров, номинальная отличительная информация (S-SKI, S-SK, S-STD) датчика и связанная с техникой подключения номинальная информация (S-PI) о порте,
c) соединенный с банком (DBK) данных датчик (SBG) визуализации выполнен таким образом, что на снятом референтном отдельном изображении (R-EB) или, соответственно, референтном видео (R-VD) локализуется по меньшей мере одна касающаяся выделяющегося объекта маркировка или искусственная маркировка, созданная для характерной для конкретного датчика референтной ситуации для съемки референтного отдельного изображения (R-EB) или, соответственно, референтного видео (R-VD), и снабженное маркировкой снятое референтное отдельное изображение (R-EBM) или референтное видео (R-VDM) сохраняется,
отличающаяся
d) блоком (STE) управления, который содержит систему с памятью и процессором (CPP) для настройки датчиков визуализации, содержащую энергонезависимую, считываемую память (SP), в которой сохранены считываемые процессором команды управляющей программы осуществляющего настройку программного модуля (PGM), и соединенный с памятью (SP) процессор (PZ), который выполняет команды управляющей программы программного модуля (PGM) для настройки датчиков визуализации, и который соединен с датчиком (SBG) визуализации, банком (DBK) данных и образует с ними один общий функциональный блок, выполнен таким образом, что
d1) для осуществления проверки настроенного датчика (SBG) визуализации снабженное маркировкой референтное отдельное изображение (R-EBM) или, соответственно, референтное видео (R-VDM), референтный набор (R-PS) параметров, номинальная отличительная информация (S-SKI, S-SK, S-STD) датчика и связанная с техникой подключения номинальная информация (S-PI) о порте загружаются в процессор (PZ),
d2) осуществляется проверка настроенного датчика (SBG) визуализации, тем что
d21) загруженная в процессор (PZ) действительная отличительная информация (I-SKI) датчика упомянутого датчика (SBG) визуализации, в частности полученная из конфигурированной действительной метки (I-SK) датчика и/или конфигурированных действительных данных (I-STD) о типе датчика сверяется с номинальной отличительной информацией (S-SKI, S-SK, S-STD) датчика, или загруженная в процессор (PZ) связанная с техникой подключения действительная информация (I-PI) о порте сверяется с номинальной информацией (S-PI) о порте,
d22) загруженный в процессор (PZ) действительный набор (I-PS) параметров датчика (SBG) визуализации сверяется с референтным набором (R-PS) параметров,
d23) по меньшей мере одно загруженное в процессор (PZ) действительное отдельное изображение (I-EB) или действительное видео (I-VD) датчика (SBG) визуализации сверяется в отношении соответствующей маркировки с соответствующим, имеющим маркировку референтным отдельным изображением (R-EBM) или, соответственно, референтным видео (R-VDM),
d3) генерируется первое сообщение (FM1) об ошибке или первое сообщение (FM1) об ошибке и результирующий из сверки набора параметров, скорректированный, правильный набор (PSK) параметров, если сверочная проверка в соответствии с признаком d22) или признаками d21) и d22) не дает совпадения между действительным набором (I-PS) параметров и референтным набором (R-PS) параметров,
d4) генерируется второе сообщение (FM2) об ошибке, если сверочная проверка в соответствии с признаком d23) показывает, что маркировка на действительном отдельном изображении (I-EB) или, соответственно, действительном видео (I-VD) и маркировка на референтном отдельном изображении (R-EBM) или, соответственно, референтном видео R-VDM по существу не находятся в одинаковом месте на соответствующем отдельном изображении или, соответственно, видео.
18. Система (SES) настройки датчиков по п. 17, отличающаяся тем, что
блок (STE) управления в целях пусконаладки и технического обслуживания соединен с системой (IWS) пусконаладки/технического обслуживания («опция I»; «опция II»), в которую передаются сообщения (FM1, FM2) об ошибках и при необходимости скорректированный, правильный набор (PSK) параметров, причем скорректированный, правильный набор (PSK) параметров передается от блока (STE) управления или системы (IWS) пусконаладки/технического обслуживания в настроенный датчик (SBG) визуализации путем установки набора параметров в датчик.
19. Система (SES) настройки датчиков по п. 17 или 18, отличающаяся тем, что
с помощью второго сообщения (FM2) об ошибке сигнализируется о неправильной настройке/неправильной ориентации датчика (SBG) визуализации.
20. Система (SES) настройки датчиков по п. 19, отличающаяся тем, что
неправильная настройка/неправильная ориентация датчика (SBG) визуализации корректируется вручную.
21. Система (SES) настройки датчиков по п. 19, отличающаяся тем, что
неправильная настройка/неправильная ориентация датчика (SBG) визуализации возникает вследствие изменения позиционирования, например из-за соскальзывания датчика, неправильного связанного с техникой передачи данных и электрического подсоединения датчика, например из-за неправильного каблирования или монтажа, неудовлетворительной ориентации датчика или еще не осуществленного обновления программного обеспечения.
22. Система (SES) настройки датчиков по п. 21, отличающаяся тем, что
неправильная настройка/неправильная ориентация датчика (SBG) визуализации вследствие неудовлетворительной ориентации датчика компенсируется либо интеллектуальным программным обеспечением датчика (SBG) визуализации, при этом выдаваемый датчиком (SBG) визуализации материал изображения подвергается перерасчету, либо - в случае датчиков подсчета пассажиров или камер наблюдения в качестве датчика (SBG) визуализации, которые часто покрывают область большего размера, чем необходимо ему для подсчета или, соответственно, наблюдения - путем рассмотрения фрагмента изображения, смещенного на неправильную настройку/неправильную ориентацию.
23. Система (SES) настройки датчиков по любому из пп. 17-22, отличающаяся тем, что
характерная для конкретного датчика референтная ситуация, что касается позиционирования, ориентации, конфигурации референтного набора (R-PS) параметров, связанного с техникой передачи данных и электрического подсоединения, а также правильной настройки датчика (SBG) визуализации, имеет место в установке (AL), в частности транспортном средстве (FZ) для перевозки пассажиров, имеющем датчики подсчета пассажиров, например в рельсовом и дорожном сообщении, или устройстве (VRÜ) для контроля помещений, имеющем камеры наблюдения.
24. Система (SES) настройки датчиков по п. 23, отличающаяся тем, что
блок (STE) управления, который соединен с запоминающим устройством (SPE) для сохранения характерной для данной установки контекстной информации («опция I»; «опция II») и который образует с запоминающим устройством (SPE) дополнительный общий функциональный блок, выполнен таким образом, что
для проверки настроенного датчика (SBG) визуализации в установке (AL, FZ, VRÜ) учитывается контекст установки, в частности тип установки, например рельсовое транспортное средство конструктивного ряда ICE 3, смонтированные в установке (AL, FZ, VRÜ) компоненты или подсистемы, состояние установки, например режим эксплуатации, состояние компонента, например открытие двери.
25. Транспортное средство (AL, FZ) для перевозки пассажиров, отличающееся тем, что
либо система (SES) настройки датчиков по любому из пп. 17-24 интегрирована в транспортное средство (AL, FZ) («опция A»), либо блок (STE) управления и по меньшей мере один датчик (SBG) визуализации системы (SES) настройки датчиков по любому из пп. 17-24 интегрированы в транспортное средство (Al, FZ) («опция В»).
26. Транспортное средство (AL, FZ) для перевозки пассажиров по п. 25, отличающееся перевозкой пассажиров в рельсовом и дорожном сообщении.
27. Устройство (AL, VRÜ) для контроля помещений, отличающееся тем, что
либо система (SES) настройки датчиков по любому из пп. 17-24 интегрирована в устройство (AL, VRÜ) для контроля помещений («опция A»), либо блок (STE) управления и по меньшей мере один датчик (SBG) визуализации системы (SES) настройки датчиков по любому из пп. 17-24 интегрированы в устройство (AL, VRÜ) для контроля помещений («опция В»).
| US 20090303324 A1, 10.12.2009 | |||
| US 9655075 B2, 16.05.2017 | |||
| WO 2017059490 A1, 13.04.2017 | |||
| US 9671876 B2, 06.06.2017 | |||
| СОЗДАНИЕ ИНТЕГРИРОВАННЫХ ПРЕДУПРЕЖДЕНИЙ В ТЕХНОЛОГИЧЕСКОЙ УСТАНОВКЕ | 2003 |
|
RU2357278C2 |

