Область техники
Настоящее изобретение относится к транспортному средству и способу управления транспортным средством.
Уровень техники
Обычно в качестве транспортного средства этого вида предлагается транспортное средство, включающее в себя двигатель, трансмиссию, сцепление, соединяющее двигатель и трансмиссию, и электромагнитный датчик, определяющий скорость вращения входного вала трансмиссии (см., например, публикацию выложенной заявки на патент Японии №2000-88088). В местности с холодным климатом нагреватели, растапливающие снег на поверхности дороги, иногда помещены под поверхность дороги, а электромагнитный датчик чувствителен к воздействию переменного магнитного поля, создаваемого переменным током, который проходит к нагревателю поверхности дороги. Следовательно, в этом транспортном средстве оценивается, оказывает или нет воздействие на электромагнитный датчик переменное магнитное поле, посредством проверки значения входной скорости вращения, которая определяется электромагнитным датчиком, когда зажигание выключено и двигатель остановился, и когда на электромагнитный датчик оказывается воздействие переменного магнитного поля, сцепление управляется с помощью скорости вращения, при которой на электромагнитный датчик не оказывает воздействие переменное магнитное поле, таким образом, транспортное средство может правильно управляться даже в окружении, в котором на электромагнитный датчик оказывает воздействие переменное магнитное поле.
Сущность изобретения
В данном случае в транспортном средстве, которое включает в себя двигатель, который соединен с ведущим валом, соединенным с ведущими колесами через элемент передачи мощности, такой как трансмиссия, и датчик скорости вращения, определяющий скорость вращения ведущего вала (датчик, подверженный воздействию магнитного поля от нагревателя поверхности дороги), и оценивает, остановилось или нет транспортное средство, на основе того, является или нет скорость вращения ведущего вала, определенная датчиком скорости вращения, заданной скоростью вращения или меньшей, желательно более точно оценивать, остановилось или нет транспортное средство, в соответствии с тем, оказывается ли воздействие на датчик скорости вращения от нагревателя поверхности дороги. Кроме того, в транспортном средстве, в котором выполняется некоторая обработка в ответ на операцию выключения зажигания водителем в условиях, когда транспортное средство оценено как остановившееся, необходимо сделать возможным оценку того, оказывается или нет воздействие на датчик скорости вращения от нагревателя поверхности дороги, даже когда зажигание включено, и сделать возможным оценку того, остановилось или нет транспортное средство.
Транспортное средство и способ управления транспортным средством согласно настоящему изобретению направлены на обеспечение более точной оценки того, остановилось или нет транспортное средство, в соответствии с тем, являются ли нормальными определенная скорость вращения ведущего вала, которая определяется датчиком скорости вращения ведущего вала, который определяет скорость вращения ведущего вала, соединенного с ведущими колесами, и определенная скорость вращения электродвигателя, которая определяется датчиком скорости вращения электродвигателя, который определяет скорость вращения электродвигателя. Кроме того, транспортное средство и способ управления транспортным средством согласно настоящему изобретению обеспечивают оценку того, являются ли нормальными или нет определенная скорость вращения ведущего вала и определенная скорость вращения электродвигателя.
Чтобы решить, по меньшей мере, частично, вышеуказанные задачи, транспортное средство и способ управления транспортным средством согласно настоящему изобретению используют следующие средства.
Настоящее изобретение направлено на транспортное средство. Транспортное средство включает в себя: электродвигатель, потребляющий и вырабатывающий энергию; модуль передачи энергии, передающий энергию между электродвигателем и ведущим валом, соединенным с ведущими колесами; модуль определения или вычисления скорости вращения ведущего вала, определяющий или вычисляющий скорость вращения ведущего вала; модуль определения скорости вращения электродвигателя, определяющий скорость вращения электродвигателя; модуль оценки скорости вращения, оценивающий, являются ли нормальными или нет определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя, на основе определенной или вычисленной скорости вращения ведущего вала, которая является скоростью вращения ведущего вала, определенной или вычисленной модулем определения или вычисления скорости вращения ведущего вала, и определенной скорости вращения электродвигателя, которая является скоростью вращения электродвигателя, определенной модулем определения скорости вращения электродвигателя; модуль задания диапазона оценки остановки, устанавливающий первый заданный диапазон скорости вращения в качестве диапазона оценки остановки, когда определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя оценены как нормальные модулем оценки скорости вращения, и устанавливающий второй заданный диапазон скорости вращения с первым заданным диапазоном скорости вращения в качестве одной его части в качестве диапазона оценки остановки, когда модулем оценки скорости вращения оценено, что, по меньшей мере, одна из определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя не является нормальной; и модуль оценки остановки транспортного средства, оценивающий, остановилось или нет транспортное средство, на основе оцененной скорости вращения ведущего вала, которая задается на основе определенной или вычисленной скорости вращения ведущего вала, определенной или вычисленной модулем определения или вычисления скорости вращения ведущего вала, или определенной скорости вращения электродвигателя, определенной модулем определения скорости вращения электродвигателя, и диапазона оценки остановки, заданного модулем задания диапазона оценки остановки.
В транспортном средстве настоящего изобретения оценивается, являются ли нормальными или нет определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя, на основе определенной или вычисленной скорости вращения ведущего вала, которая является скоростью вращения ведущего вала, определенной или вычисленной модулем определения или вычисления скорости вращения ведущего вала, и определенной скорости вращения электродвигателя, которая является скоростью вращения электродвигателя, определенной модулем определения скорости вращения электродвигателя, первый заданный диапазон скорости вращения задается в качестве диапазона оценки остановки, когда определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя оценены как нормальные, второй заданный диапазон скорости вращения с первым заданным диапазоном скорости вращения в качестве его части задается в качестве диапазона оценки остановки, когда оценено, что, по меньшей мере, одна из определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя не является нормальной, и оценивается, остановилось или нет транспортное средство, на основе оцененной скорости вращения ведущего вала, которая задается на основе определенной или вычисленной скорости вращения ведущего вала или определенной скорости вращения электродвигателя, и диапазона оценки остановки. Более конкретно, оценивается, являются ли нормальными или нет определенная скорость вращения ведущего вала и определенная скорость вращения электродвигателя, на основе определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя. Когда оценено, что определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя являются нормальными, оценивается, остановилось ли транспортное средство или нет, на основе оценки скорости вращения ведущего вала и первого заданного диапазона скорости вращения. Когда оценено, что, по меньшей мере, одна из определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя не является нормальной, оценивается, остановилось ли транспортное средство или нет, на основе оцененной скорости вращения ведущего вала и второго заданного диапазона скорости вращения с первым заданным диапазоном скорости вращения в качестве одной его части. В связи с этим, может быть более точно оценено, остановилось или нет транспортное средство, по сравнению с тем, когда оценивается, остановилось или нет транспортное средство, с помощью первого заданного диапазона скорости вращения независимо от того, являются ли нормальными или нет определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя. Кроме того, оценивается, являются ли нормальными или нет определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя, на основе определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя. Здесь модуль определения или вычисления скорости вращения ведущего вала включает в себя модуль определения скорости вращения ведущего вала, который определяет скорость вращения ведущего вала, и модуль вычисления скорости вращения ведущего вала, который вычисляет скорость вращения ведущего вала.
В транспортном средстве согласно настоящему изобретению модуль задания диапазона оценки остановки может быть модулем, который задает диапазон первой заданной скорости вращения или меньшей в качестве первого заданного диапазона скорости вращения и задает диапазон второй заданной скорости вращения или меньшей, которая является большей, чем первая заданная скорость вращения, в качестве второго заданного диапазона скорости вращения; и модуль оценки остановки транспортного средства может быть модулем, который оценивает, остановилось или нет транспортное средство, на основе абсолютного значения оцененной скорости вращения ведущего вала и диапазона оценки остановки.
Также в транспортном средстве настоящего изобретения модуль определения или вычисления скорости вращения ведущего вала может быть модулем, определяющим или вычисляющим скорость вращения на основе скорости вращения ведущего вала и заданного фактора, когда заданный фактор случается; модуль определения скорости вращения электродвигателя может быть модулем, способным определять скорость вращения электродвигателя независимо от заданного фактора, даже когда заданный фактор случается; и модуль задания диапазона оценки остановки может быть модулем, устанавливающим диапазон, включающий в себя определенную или вычисленную скорость вращения ведущего вала, когда случается заданный фактор, в качестве второго заданного диапазона скорости вращения. Таким образом, может быть более точно оценено, что транспортное средство остановилось, когда случается заданный фактор. Кроме того, в этом случае определенная или вычисленная скорость вращения ведущего вала основана на скорости вращения ведущего вала и заданном факторе, а определенная скорость вращения электродвигателя становится скоростью вращения электродвигателя независимо от заданного фактора. Следовательно, в модуле оценки скорости вращения оценивается, являются ли нормальными или нет определенная скорость вращения ведущего вала и определенная скорость вращения электродвигателя, на основе определенной скорости вращения ведущего вала с добавлением воздействия заданного фактора и определенной скорости вращения электродвигателя без добавления воздействия заданного фактора. Здесь модуль определения скорости вращения ведущего вала может быть модулем, который определяет скорость вращения ведущего вала электромагнитным датчиком. Кроме того, время, когда заданный фактор случается, включает в себя время, когда на транспортное средство воздействует магнитное поле на основе тока, который проходит к нагревателю дороги, пока транспортное средство находится в режиме остановки.
Кроме того, в транспортном средстве согласно настоящему изобретению модуль задания диапазона оценки остановки может быть модулем, который задает второй заданный диапазон скорости вращения в качестве диапазона оценки остановки, когда определенная скорость вращения электродвигателя находится в третьем заданном диапазоне скорости вращения, и задает первый заданный диапазон скорости вращения в качестве диапазона оценки остановки, когда определенная скорость вращения электродвигателя находится вне третьего заданного диапазона скорости вращения, когда модулем оценки скорости вращения оценено, что, по меньшей мере, одна из определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя не является нормальной; и модуль оценки остановки транспортного средства может быть модулем, который оценивает, остановилось или нет транспортное средство, с помощью определенной или вычисленной скорости вращения ведущего вала в качестве оцененной скорости вращения ведущего вала. В этом случае модуль задания диапазона оценки остановки может задать диапазон скорости вращения электродвигателя, соответствующий первому заданному диапазону скорости вращения в скорости вращения ведущего вала, в качестве третьего заданного диапазона скорости вращения.
Кроме того, в транспортном средстве согласно настоящему изобретению модуль оценки скорости вращения может быть модулем, который вычисляет скорость вращения электродвигателя на основе определенной или вычисленной скорости вращения ведущего вала и состояния модуля передачи энергии (трансмиссии) и оценивает, являются ли нормальными или нет определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя, на основе отклонения между вычисленной скоростью вращения электродвигателя, которая является вычисленной скоростью вращения электродвигателя, и определенной скоростью вращения электродвигателя. В этом случае модуль оценки скорости вращения может быть модулем, который оценивает, что, по меньшей мере, одна из определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя не является нормальной, когда отклонение между вычисленной скоростью вращения электродвигателя и определенной скоростью вращения электродвигателя находится вне четвертого заданного диапазона скорости вращения в течение заданного времени. Таким образом, может быть более точно оценено, являются ли нормальными или нет определенная скорость вращения ведущего вала и определенная скорость вращения электродвигателя.
Также в транспортном средстве настоящего изобретения модуль оценки остановки транспортного средства может быть модулем, который оценивает, остановилось или нет транспортное средство, с помощью значения 0, заданного в качестве оцененной скорости вращения ведущего вала, когда определенная или вычисленная скорость вращения ведущего вала находится в пятом заданном диапазоне скорости вращения, и оценивает, остановилось или нет транспортное средство, с помощью определенной или вычисленной скорости вращения ведущего вала, заданной в качестве оцененной скорости вращения ведущего вала, когда определенная или вычисленная скорость вращения ведущего вала находится вне пятого заданного диапазона скорости вращения, когда модулем оценки скорости вращения оценено, что, по меньшей мере, одна из определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя не является нормальной. В этом случае модуль оценки остановки транспортного средства может быть модулем, который задает диапазон, включающий в себя определенную или вычисленную скорость вращения ведущего вала, когда транспортное средство остановилось, в качестве пятого заданного диапазона скорости вращения. Таким образом, может быть более точно оценено, что транспортное средство остановилось, когда транспортное средство остановилось.
Кроме того, транспортное средство настоящего изобретения может дополнительно включать в себя двигатель внутреннего сгорания и модуль регулирования вращения, который соединен с выходным валом двигателя внутреннего сгорания и ведущим валом, независимо вращаемым относительно выходного вала, и способен регулировать скорость вращения выходного вала относительно ведущего вала с помощью потребления и выработки электрической энергии и подведения и отвода мощности к и от выходного вала и ведущего вала. В этом случае модуль регулирования вращения может быть модулем, включающим в себя модуль подведения/отвода мощности трехвального типа, который соединен с тремя валами, которыми являются выходной вал двигателя внутреннего сгорания, ведущий вал и третий вал, и подает и отводит энергию к или от оставшегося вала на основе энергии, которая подводится и отводится к и от любых двух валов из трех валов, и генератор, способный подавать и отводить энергию к и от третьего вала.
В транспортном средстве настоящего изобретения, которое включает в себя двигатель внутреннего сгорания, модуль подведения/отвода мощности трехвального типа и генератор, модуль определения или вычисления скорости вращения ведущего вала может быть модулем, включающим в себя модуль определения скорости вращения ведущего вала, который определяет скорость вращения ведущего вала, модуль определения скорости вращения двигателя, который определяет скорость вращения двигателя внутреннего сгорания, модуль определения скорости вращения генератора, который определяет скорость вращения генератора, и модуль вычисления скорости вращения ведущего вала, который вычисляет скорость вращения ведущего вала на основе определенной скорости вращения двигателя, которая является скоростью вращения двигателя внутреннего сгорания, определенной модулем определения скорости вращения двигателя, и определенной скорости вращения генератора, которая является скоростью вращения генератора, определенной модулем определения скорости вращения генератора; и модуль оценки остановки транспортного средства может быть модулем, который задает определенную скорость вращения ведущего вала, которая является скоростью вращения ведущего вала, определенной модулем определения скорости вращения ведущего вала, или вычисленную скорость вращения ведущего вала, которая является скоростью вращения ведущего вала, вычисленной модулем вычисления скорости вращения ведущего вала, в качестве определенной или вычисленной скорости вращения ведущего вала и оценивает, остановилось или нет транспортное средство, на основе оценки скорости вращения ведущего вала, которая задается на основе определенной или вычисленной скорости вращения ведущего вала или определенной скорости вращения электродвигателя и диапазона оценки остановки, когда модулем оценки скорости вращения оценено, что, по меньшей мере, одна из определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя не является нормальной. Таким образом, может быть оценено, остановилось ли транспортное средство или нет, с помощью определенной или вычисленной скорости вращения ведущего вала (определенной скорости вращения ведущего вала или вычисленной скорости вращения ведущего вала) или определенной скорости вращения электродвигателя. В этом случае модуль оценки остановки транспортного средства может быть модулем, который оценивает, остановилось или нет транспортное средство, с помощью значения 0, заданного в качестве оцененной скорости вращения ведущего вала, когда определенная или вычисленная скорость вращения ведущего вала находится в пятом заданном диапазоне скорости вращения, и оценивает, остановилось или нет транспортное средство, с помощью определенной или вычисленной скорости вращения ведущего вала, заданной в качестве оцененной скорости вращения ведущего вала, когда определенная или вычисленная скорость вращения ведущего вала находится вне пятого заданного диапазона скорости вращения, когда модулем оценки скорости вращения оценено, что, по меньшей мере, одна из определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя не является нормальной, и когда скорость вращения двигателя внутреннего сгорания не может быть определена модулем определения скорости вращения двигателя или когда скорость вращения генератора не может быть определена модулем определения скорости вращения генератора. В этом случае модуль оценки остановки транспортного средства может быть модулем, который задает диапазон, включающий в себя определенную или вычисленную скорость вращения ведущего вала, когда транспортное средство остановилось, в качестве пятого заданного диапазона скорости вращения. Таким образом, может быть более точно оценено, что транспортное средство остановилось, когда транспортное средство остановилось.
Транспортное средство согласно настоящему изобретению может дополнительно включать в себя модуль блокировки, который блокирует ведущее колесо; и модуль управления парковкой, который управляет модулем блокировки так, что ведущее колесо блокируется модулем блокировки, когда созданы условия парковки, включающие в себя условие того, что транспортное средство оценено как остановившееся модулем оценки остановки транспортного средства, и условие того, что положение переключателя режимов трансмиссии управляется водителем так, чтобы переключиться в положение парковки.
Также транспортное средство согласно настоящему изобретению может дополнительно включать в себя: аккумулятор, способный накапливать и разряжать электричество; модуль отключения и соединения, который соединяет аккумулятор с системой электропривода, включающей в себя, по меньшей мере, электродвигатель, для обеспечения возможности отключения аккумулятора, и модуль управления отключением, который управляет модулем отключения и соединения так, что электродвигатель и аккумулятор отключаются модулем отключения и соединения, когда созданы условия отключения, включающие в себя условие того, что транспортное средство оценено как остановившееся модулем оценки остановки транспортного средства, и условие того, что зажигание выключено водителем. В этом случае в транспортном средстве, включающем в себя двигатель внутреннего сгорания в дополнение к электродвигателю и модуль регулирования вращения, который соединен с выходным валом двигателя внутреннего сгорания и ведущим валом, независимо вращаемым относительно выходного вала, и способен регулировать скорость вращения выходного вала относительно вала с помощью потребления и выработки электрической энергии и подачи и отвода мощности к и от выходного вала и ведущего вала, модуль отключения и соединения может быть модулем, который соединяет аккумулятор с системой электропривода, включающей в себя электродвигатель и модуль регулирования вращения, который способен отсоединить аккумулятор.
В транспортном средстве настоящего изобретения модуль передачи энергии может быть модулем трансмиссии, который передает энергию между вращающимся валом электродвигателя и ведущим валом с изменением в передаточном отношении.
Настоящее изобретение направлено на способ управления транспортным средством, включающим в себя электродвигатель, потребляющий и вырабатывающий энергию, модуль передачи энергии, передающий энергию между электродвигателем и ведущим валом, соединенным с ведущими колесами, модуль определения или вычисления скорости вращения ведущего вала, определяющий или вычисляющий скорость вращения ведущего вала, и модуль определения скорости вращения электродвигателя, определяющий скорость вращения электродвигателя. Согласно способу управления транспортным средством оценивается, являются ли нормальными или нет определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя, на основе определенной или вычисленной скорости вращения ведущего вала, которая является скоростью вращения ведущего вала, определенной или вычисленной модулем определения или вычисления скорости вращения ведущего вала, и определенной скорости вращения электродвигателя, которая является скоростью вращения электродвигателя, определенной модулем определения скорости вращения электродвигателя; и когда оценено, что определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя являются нормальными, оценивается, остановилось или нет транспортное средство, на основе оцененной скорости вращения ведущего вала, которая задается на основе определенной или вычисленной скорости вращения ведущего вала или определенной скорости вращения электродвигателя и первого заданного диапазона скорости вращения, а когда оценено, что, по меньшей мере, одна из определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя не является нормальной, оценивается, остановилось или нет транспортное средство, на основе оцененной скорости вращения ведущего вала, которая задается на основе определенной или вычисленной скорости вращения ведущего вала или определенной скорости вращения электродвигателя и второго заданного диапазона скорости вращения с первым заданным диапазоном скорости вращения в качестве его части.
Согласно способу управления транспортным средством оценивается, являются ли нормальными или нет определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя, на основе определенной или вычисленной скорости вращения ведущего вала, которая является скоростью вращения ведущего вала, определенной или вычисленной модулем определения или вычисления скорости вращения ведущего вала, и определенной скорости вращения электродвигателя, которая является скоростью вращения электродвигателя, определенной модулем определения скорости вращения электродвигателя, и когда оценено, что определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя являются нормальными, оценивается, остановилось или нет транспортное средство, на основе оцененной скорости вращения ведущего вала, которая задается на основе определенной или вычисленной скорости вращения ведущего вала или определенной скорости вращения электродвигателя и первого заданного диапазона скорости вращения, а когда оценено, что, по меньшей мере, одна из определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя не является нормальной, оценивается, остановилось или нет транспортное средство, на основе оцененной скорости вращения ведущего вала, которая задается на основе определенной или вычисленной скорости вращения ведущего вала или определенной скорости вращения электродвигателя, и второго заданного диапазона скорости вращения с первым заданным диапазоном скорости вращения в качестве одной его части. Таким образом, может быть более точно оценено, остановилось или нет транспортное средство, по сравнению с тем, когда оценивается, остановилось или нет транспортное средство, с помощью первого заданного диапазона скорости вращения независимо от того, являются ли нормальными или нет определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя. Кроме того, может быть оценено, являются ли нормальными или нет определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя, на основе определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя. Здесь модуль определения или вычисления скорости вращения ведущего вала включает в себя модуль определения скорости вращения ведущего вала, который определяет скорость вращения ведущего вала, модуль вычисления скорости вращения ведущего вала, который вычисляет скорость вращения ведущего вала и т.п.
Краткое описание чертежей
Фиг.1 - схема конфигурации, показывающая схему конфигурации гибридного транспортного средства 20, которое является одним вариантом осуществления настоящего изобретения;
Фиг.2 - схема конфигурации, показывающая схему конфигурации трансмиссии 60;
Фиг.3 - блок-схема, показывающая один пример алгоритма оценки остановки транспортного средства, который выполняется гибридным электронным блоком 70 управления;
Фиг.4 - блок-схема, показывающая один пример обработки оценки ненормальности отклонения скорости вращения;
Фиг.5 - блок-схема, показывающая один пример обработки для задания оцененной скорости вращения при остановке;
Фиг.6 - номограмма, показывающая один пример соотношения скоростей вращения вращающихся элементов механизма 30 распределения и объединения энергии;
Фиг.7 - блок-схема, показывающая один пример первого алгоритма обработки во время оценки остановки транспортного средства, который выполняется гибридным электронным блоком 70 управления;
Фиг.8 - блок-схема, показывающая один пример второго алгоритма обработки во время оценки остановки транспортного средства, который выполняется гибридным электронным блоком 70 управления;
Фиг.9 - блок-схема, показывающая один пример алгоритма оценки остановки транспортного средства модифицированного варианта осуществления;
Фиг.10 - схема конфигурации, показывающая схему конфигурации гибридного транспортного средства 120 модифицированного варианта осуществления; и
Фиг.11 - схема конфигурации, показывающая схему конфигурации гибридного транспортного средства 220 модифицированного варианта осуществления.
Наилучший способ осуществления изобретения
Далее со ссылкой на варианты осуществления будет описан наилучший способ осуществления изобретения.
Фиг.1 является схемой конфигурации, показывающей схему конфигурации гибридного транспортного средства 20, которая является одним вариантом осуществления настоящего изобретения. Гибридное транспортное средство 20 согласно варианту осуществления включает в себя, как показано на чертеже, двигатель 22, механизм 30 распределения и объединения энергии трехвального типа, соединенный с коленчатым валом 26 в качестве выходного вала двигателя 22 через демпфер 28, электродвигатель MG1, соединенный с механизмом 30 распределения и объединения энергии и генерирующий электроэнергию, электродвигатель MG2, соединенный с валом 32a коронной шестерни в качестве ведущего вала, соединенного с механизмом 30 распределения и объединения энергии, через трансмиссию 60, и гибридный электронный блок 70 управления, который управляет всем транспортным средством.
Двигатель 22 является двигателем внутреннего сгорания, который вырабатывает энергию посредством углеводородного топлива, такого как бензин или дизельное топливо, и подвержен операциям управления, таким как управление впрыском топлива, управление зажиганием и управление регулированием количества всасываемого воздуха посредством электронного блока управления двигателем (далее в данном документе называемом ЭБУ двигателя) 24. Сигналы от различных датчиков, определяющие режим работы двигателя 22, например, положение коленчатого вала от датчика 23 положения коленчатого вала, который определяет положение колена коленчатого вала 26, и т.п. вводятся в ЭБУ 24 двигателя. Датчик 23 положения коленчатого вала сконфигурирован как датчик с электромагнитным чувствительным элементом, имеющий синхронизирующий ротор, который установлен так, чтобы вращаться синхронно с вращением коленчатого вала 26, имеет зубцы, сформированные в интервалах по 10 градусов, и имеет два пропущенных зубца, сформированных для определения контрольного положения, и формирует имеющую определенную форму волну каждый раз, когда коленчатый вал 26 поворачивается на 10 градусов. ЭБУ 24 двигателя вычисляет скорость вращения двигателя 22 в соответствии с алгоритмом вычисления скорости вращения двигателя, не иллюстрирован, на основе сигнала, введенного из датчика 23 положения коленчатого вала. Далее в данном документе скорость вращения двигателя 22, которая получается таким образом, будет описана как определенная скорость Nedet вращения. ЭБУ 24 двигателя связывается с гибридным электронным блоком 70 управления и выполняет управление работой двигателя 22 в соответствии с управляющим сигналом от гибридного электронного блока 70 управления и выводит данные о режиме работы двигателя 22 в гибридный электронный блок 70 управления по необходимости.
Механизм 30 распределения и объединения энергии имеет солнечную шестерню 31, которая является шестерней с наружным зацеплением, коронную шестерню 32, которая является шестерней с внутренним зацеплением и размещена концентрически с солнечной шестерней 31, множество сателлитов (ведущих планетарных шестерен) 33, которые сцепляются с солнечной шестерней 31 и с коронной шестерней 32, и водило 34, которое удерживает множество ведущих шестерней 33 таким образом, чтобы разрешить их свободное круговое вращение и свободное вращение на соответствующих осях. То есть механизм 30 распределения и объединения энергии сконструирован как механизм планетарной передачи, который позволяет дифференциальное движение солнечной шестерни 31, коронной шестерни 32 и водила 34 в качестве вращающихся элементов. Водило 34, солнечная шестерня 31 и коронная шестерня 32 в механизме 30 распределения и объединения энергии соответственно связаны с коленчатым валом 26 двигателя 22, электродвигателем MG1 и трансмиссией 60 через вал 32a коронной шестерни. В то время как электродвигатель MG1 функционирует как генератор, энергия, выводимая из двигателя 22 и подаваемая через водило 34, распределяется на солнечную шестерню 31 и коронную шестерню 32 согласно передаточному отношению. В то время как электродвигатель MG1 функционирует как электродвигатель, с другой стороны, энергия, выводимая из двигателя 22 и подаваемая через водило 34, объединяется с энергией, выводимой из электродвигателя MG1, и подается через солнечную шестерню 31, и составная энергия выводится на коронную шестерню 32. Энергия, выведенная на коронную шестерню 32, таким образом, передается ведущим колесам 39a и 39b через механизм 37 зубчатой передачи и дифференциальную передачу 38 от вала 32a коронной шестерни.
Механизм 37 зубчатой передачи установлен с механизмом 90 блокировки трансмиссии на стоянке, состоящим из парковочной шестерни 92, установленной на последней шестерне 37a, и тяги 92 блокировки трансмиссии на стоянке, которая зацепляется и блокирует парковочную шестерню 92, чтобы остановить ее вращение. Тяга 94 блокировки трансмиссии на стоянке управляется приводом (не показан), подчиняющимся управлению приводом посредством гибридного электронного блока 70 управления, в который подается операционный сигнал переключения в положение парковки (P-положение) из другого положения или операционный сигнал переключения в другое положение из положения парковки, и тяга 94 блокировки трансмиссии на стоянке выполняет блокировку на стоянке или освобождает ее, сцепляясь с парковочной шестерней 92 и освобождая ее. Последняя шестерня 37a механически соединена с ведущими колесами 39a и 39b и, следовательно, механизм 90 блокировки трансмиссии на стоянке косвенно блокирует ведущие колеса 39a и 39b.
Электродвигатель MG1 и электродвигатель MG2 сконфигурированы как известные синхронные электродвигатели-генераторы, которые могут управляться как генераторы и электродвигатели, и обмениваются электрической энергией с аккумулятором 50 через инверторы 41 и 42. Линия 54 электропитания, которая соединяет инверторы 41 и 42 и аккумулятор 50, сконфигурирована как электрическая шина положительного электрода и электрическая шина отрицательного электрода, обычно используемые каждым из инверторов 41 и 42 так, что электрическая энергия, которая генерируется любым из электродвигателей MG1 и MG2, может потребляться другим электродвигателем. Соответственно, аккумулятор 50 заряжается электрической энергией, сгенерированной любым из электродвигателей MG1 и MG2, и разряжает электрическую энергию, которую расходует любой из электродвигателей MG1 и MG2. Кроме того, линия 54 электропитания снабжена главным реле 54 системы, которое отключает подачу электроэнергии инверторам 41 и 42 от аккумулятора 50. Электродвигатели MG1 и MG2 оба подчиняются управлению посредством электронного блока управления электродвигателя (далее в данном документе описывается как ЭБУ электродвигателя) 40. Сигналы, необходимые для управления электродвигателями MG1 и MG2, например, сигналы от датчиков 43 и 44 определения углового положения (например, преобразователи или т.п.), которые определяют угловые положения роторов электродвигателей MG1 и MG2, фазные токи, которые подаются электродвигателям MG1 и MG2, которые определяются датчиками тока, не иллюстрированы, и т.п. вводятся в ЭБУ 40 электродвигателя, а переключающие управляющие сигналы инверторам 41 и 42 выводятся из ЭБУ 40 электродвигателя. ЭБУ 40 электродвигателя вычисляет скорости вращения роторов электродвигателей MG1 и MG2 в соответствии с алгоритмом вычисления скорости вращения электродвигателя (не показан) на основе сигналов, введенных от датчиков 43 и 44 определения углового положения. Далее в данном документе скорости вращения электродвигателей MG1 и MG2, полученные таким образом, описываются как определенные скорости Nm1det и Nm2det вращения. ЭБУ 40 электродвигателя связывается с гибридным электронным блоком 70 управления, выполняет управление электродвигателями MG1 и MG2 посредством управляющих сигналов от гибридного электронного блока 70 управления и выводит данные, касающиеся режимов работы электродвигателей MG1 и MG2, гибридному электронному блоку 70 управления в соответствии с необходимостью.
Трансмиссия 60 может соединять вращающийся вал 48 электродвигателя MG2 и вал 32a коронной шестерни, разъединять соединение и передавать соединение обоих валов валу 32a коронной шестерни, уменьшая скорость вращения вращающегося вала 48 электродвигателя MG2 в два этапа. Пример конфигурации трансмиссии 60 показан на фиг.2. Трансмиссия 60, показанная на фиг.2, сформирована посредством планетарного зубчатого механизма 60a с двойным сателлитом и планетарного зубчатого механизма 60b с одним сателлитом и двух тормозов B1 и B2. Планетарный зубчатый механизм 60a с двойным сателлитом включает в себя солнечную шестерню 61, которая является шестерней с наружным зацеплением, коронную шестерню 62, которая является шестерней с внутренним зацеплением и расположена на концентрической окружности с солнечной шестерней 61, множество первых сателлитов 63a, которые сцепляются с солнечной шестерней 61, множество вторых сателлитов 63b, которые сцепляются с первыми сателлитами 63a и коронной шестерней 62, и водило 64, которое соединяет множество первых сателлитов 63a и множество вторых сателлитов 63b и удерживает их так, что они могут вращаться и двигаться по орбите. Солнечная шестерня 61 может сделать свое вращение свободным или остановить вращение посредством включения и выключения тормоза B1. Планетарный зубчатый механизм 60b с одним сателлитом включает в себя солнечную шестерню 65, которая является шестерней с наружным зацеплением, коронную шестерню 66, которая является шестерней с внутренним зацеплением, расположенной на концентрической окружности с солнечной шестерней 65, множество сателлитов 67, которые сцепляются с солнечной шестерней 65 и сцепляются с коронной шестерней 66, и водило 68, которое удерживает множество сателлитов 67 так, что они могут вращаться и двигаться по орбите. Солнечная шестерня 65 соединена с вращающимся валом 48 электродвигателя MG2, водило 68 соединено с валом 32a коронной шестерни, и коронная шестерня 66 может сделать свое вращение свободным или остановить вращение посредством включения и выключения тормоза B2. Планетарный зубчатый механизм 60a с двойным сателлитом и планетарный зубчатый механизм 60b с одним сателлитом соответственно связаны коронными шестернями 62 и 66 и водилами 64 и 68. Трансмиссия 60 может отделять вращающийся вал 48 электродвигателя MG2 от вала 32a коронной шестерни, выключая оба тормоза B1 и B2. Трансмиссия 60 выключает тормоз B1 и включает тормоз B2, таким образом, уменьшает вращение вращающегося вала 48 электродвигателя MG2 с относительно большим коэффициентом понижения и передает вращение валу 32a коронной шестерни (далее в данном документе это состояние будет описываться как состояние Lo передачи). Трансмиссия 60 включает в себя тормоз B1 и выключает тормоз B2 и, таким образом, уменьшает вращение вращающегося вала 48 электродвигателя MG2 с относительно небольшим коэффициентом понижения и передает вращение валу 32a коронной шестерни (далее в данном документе это состояние будет описываться как состояние Hi передачи). Состояние, в котором тормоза B1 и B2 оба включены, запрещает вращение вращающегося вала 48 и вала 32a коронной шестерни. Тормоза B1 и B2 включаются и выключаются посредством регулирования гидравлического давления, которое действует на тормоза B1 и B2, активируя гидравлический привод (не показан).
Аккумулятор 50 находится под управлением электронного блока 52 управления аккумулятором (далее в данном документе именуемом как ЭБУ аккумулятора). ЭБУ 52 аккумулятора принимает различные сигналы, требуемые для управления аккумулятором 50, например, напряжение между клеммами, измеренное датчиком напряжения (не показан), расположенным между клеммами аккумулятора 50, ток заряда-разряда, измеренный датчиком тока (не показан), прикрепленным к линии 54 электропитания, соединенной с выходной клеммой аккумулятора 50, и температуру Tb аккумулятора, измеренную датчиком 51 температуры, прикрепленным к аккумулятору 50. ЭБУ 52 аккумулятора выводит данные о состоянии аккумулятора 50 в гибридный электронный блок 70 управления через соединение согласно требованиям. ЭБУ 52 аккумулятора вычисляет состояние заряда (SOC) аккумулятора 50 на основе аккумулированного тока заряда-разряда, измеренного датчиком тока, для управления аккумулятором 50.
Гибридный электронный блок 70 управления сформирован как микропроцессор с ЦП 72 в качестве ядра и включает в себя ПЗУ 74, которое хранит программу обработки, ОЗУ 76, которое временно хранит данные, и порты ввода и вывода и порт связи, которые не иллюстрированы, в дополнение к ЦП 72. Сигнал от датчика 36 скорости вращения, который сформирован как датчик с электромагнитным чувствительным элементом и определяет скорость вращения вала 32a коронной шестерни в качестве ведущего вала, сигнал зажигания от замка 80 зажигания, положение SP переключателя режимов трансмиссии от датчика 82 положения переключателя режимов трансмиссии, который определяет рабочее положение рычага 81 переключения режимов трансмиссии, открытие Acc акселератора от датчика 84 положения педали акселератора, который определяет величину нажатия на педаль 83 акселератора, положение BP педали тормоза от датчика 86 положения педали тормоза, который определяет величину нажатия на педаль 85 тормоза, скорость V транспортного средства от датчика 88 скорости транспортного средства вводятся в гибридный электронный блок 70 управления через порт ввода. Дополнительно, сигнал возбуждения к главному реле 56 системы, сигналы возбуждения к неиллюстрированным приводам тормозов B1 и B2 трансмиссии 60, сигнал возбуждения к неиллюстрированному приводу механизма 90 блокировки трансмиссии на стоянке выводятся из гибридного электронного блока 70 управления. Гибридный электронный блок 70 управления вычисляет скорость вращения вала 32a коронной шестерни посредством алгоритма вычисления скорости вращения ведущего вала, не иллюстрирован, на основе сигнала, поданного от датчика 36 скорости вращения. Далее в данном документе скорость вращения, полученная таким образом, будет описываться как определенная скорость Nodet вращения вала 32a коронной шестерни. Гибридный электронный блок 70 управления соединяется с ЭБУ 24 двигателя, ЭБУ 40 электродвигателя и ЭБУ 52 аккумулятора через порт связи, как описано выше, и обменивается различными управляющими сигналами и данными с ЭБУ 24 двигателя, ЭБУ 40 электродвигателя и ЭБУ 52 аккумулятора.
В гибридном транспортном средстве 20 варианта осуществления положения рычага 81 переключения режимов трансмиссии, которые определяются датчиком 82 положения переключателя режимов трансмиссии, включают в себя положение парковки (P-положение), нейтральное положение (N-положение), положение движения (D-положение), положение заднего хода (R-положение) и т.п.
Гибридное транспортное средство 20 варианта осуществления, которое сформировано таким образом, вычисляет потребность в крутящем моменте, который должен быть выведен на вал 32a коронной шестерни в качестве ведущего вала, на основе открытия Acc акселератора, соответствующего величине нажатия на педаль 82 акселератора водителем, и скорости V транспортного средства и выполняет управление работой двигателя 22 и электродвигателей MG1 и MG2 так, что требуемая энергия, соответствующая потребности в крутящем моменте, выводится на вал 32a коронной шестерни. В качестве операционного управления двигателем 22 и электродвигателей MG1 и MG2 упоминаются операционный режим преобразования крутящего момента для осуществления операционного управления двигателем 22 так, что мощность, соответствующая требуемой мощности, вырабатывается двигателем 22, и для осуществления управления возбуждением электродвигателей MG1 и MG2 так, что вся энергия, выводимая от двигателя 22, преобразуется в крутящий момент механизмом 30 распределения и объединения энергии и от электродвигателей MG1 и MG2 и выводится на вал 32a коронной шестерни, операционный режим заряда и разряда для осуществления операционного управления двигателем 22 так, что энергия, соответствующая сумме потребления энергии и электрической энергии, требуемой для заряда и разряда аккумулятора 50, вырабатывается двигателем 22, и для осуществления управления возбуждением электродвигателей MG1 и MG2 так, что потребность мощности выводится на вал 32a коронной шестерни с помощью всей или части энергии, которая выработана двигателем 22 с зарядом и разрядом аккумулятора 50, с преобразованием крутящего момента механизмом 30 распределения и объединения энергии, и двигателями MG1 и MG2, и режим работы электродвигателя для остановки работы двигателя 22 и осуществления управления работой так, что энергия, соответствующая потреблению энергии от электродвигателя MG2, выводится на вал 32a коронной шестерни.
Далее будет описана работа гибридного транспортного средства 20, сконфигурированного таким образом, в частности, работа, когда оценивается, остановилось или нет транспортное средство. Фиг.3 является блок-схемой, показывающей один пример алгоритма оценки остановки транспортного средства, который выполняется гибридным электронным блоком 70 управления. Этот алгоритм повторно выполняется в каждый заданный момент времени (например, каждые несколько мсек). В этом варианте осуществления, при условии, что транспортное средство оценено как остановившееся, выполняется процесс блокировки ведущих колес 39a и 39b механизмом 90 блокировки трансмиссии на стоянке в ответ на изменение переключателя режимов трансмиссии из положения SP переключателя режимов трансмиссии в P-положение водителем и процесс отключения главного реле 56 системы в ответ на выключение зажигания водителем. Более конкретно, процесс блокировки ведущих колес 39a и 39b механизмом 90 блокировки трансмиссии на стоянке выполняется, когда создано условие того, что положение SP переключателя режимов трансмиссии изменено на P-положение водителем, и условие того, что транспортное средство оценено как остановившееся, тогда как процесс отключения главного реле 56 системы выполняется, когда создано условие того, что зажигание выключено водителем, и условие того, что транспортное средство оценено как остановившееся.
Когда выполняется алгоритм оценки остановки транспортного средства, ЦП 72 гибридного электронного блока 70 управления сначала выполняет процесс ввода данных, таких как определенная скорость Nedet вращения двигателя 22, определенные скорости Nm1det и Nm2det вращения электродвигателей MG1 и MG2, определенная скорость Nodet вращения вала 32a коронной шестерни в качестве ведущего вала, флаги Fne, Fm1 и Fm2 оценки неопределяемости скорости вращения двигателя и электродвигателей MG1 и MG2 (этап S100). Здесь определенная скорость Nedet вращения двигателя 22, которая вычисляется на основе сигнала от датчика 23 положения коленчатого вала, установленного на коленчатом вале 26, вводится из ЭБУ 24 двигателя посредством передачи данных. Кроме того, определенные скорости Nm1det и Nm2det вращения электродвигателей MG1 и MG2, которые вычисляются на основе угловых положений роторов электродвигателя MG1 и MG2, которые определяются датчиками 43 и 44 определения углового положения, вводятся из ЭБУ 40 электродвигателя посредством передачи данных. Определенная скорость Nodet вращения вала 32a коронной шестерни в качестве ведущего вала, которая вычисляется на основе сигнала от датчика 36 скорости вращения и записывается по заданному адресу в ОЗУ 76, считывается и, таким образом, вводится. Флаг Fne оценки неопределяемости скорости вращения двигателя, который получается как результат оценки того, может или нет определенная скорость Nedet вращения двигателя 22 быть получена, на основе того, происходит или нет ненормальность с датчиком 23 положения коленчатого вала, прекращается или нет сигнал от датчика 23 положения коленчатого вала в течение заданного времени и т.п. (значение 0, когда определенная скорость Nedet вращения может быть получена, значение 1, когда она не может быть получена), вводится из ЭБУ 24 двигателя посредством передачи данных. Флаги Fm1 и Fm2 оценки неопределяемости скорости вращения электродвигателей MG1 и MG2, которые получаются как результат оценки того, могут или нет определенные скорости Nm1det и Nm2det вращения электродвигателей MG1 и MG2 быть получены, на основе того, происходит или нет ненормальность с датчиками 43 и 44 определения углового положения, прекращаются или нет сигналы от датчиков 43 и 44 определения углового положения в течение заданного времени, и т.п. (значение 0, когда определенные скорости Nm1det и Nm2det вращения могут быть получены, и значение 1, когда они не могут быть получены), вводятся соответственно из ЭБУ 40 электродвигателя посредством передачи данных. В варианте осуществления датчик 23 положения коленчатого вала и датчик 36 скорости вращения сформированы как датчики с электромагнитным чувствительным элементом. Следовательно, когда они подвергаются воздействию магнитного поля извне, определенная скорость Nedet вращения двигателя 22 и определенная скорость Nodet вращения вала 32a коронной шестерни в качестве ведущего вала иногда становятся скоростями вращения в некоторой степени от воздействия магнитного поля извне, когда двигатель 22 и вал 32a коронной шестерни по существу останавливают вращение. Например, рассматривая ситуацию, в которой транспортное средство остановилось в положении, где под дорогой размещен нагреватель дороги для растапливания снега в дороге в местности с холодным климатом или т.п., определенная скорость Nodet вращения вала 32a коронной шестерни иногда становится скоростью вращения в некоторой степени из-за воздействия магнитного поля, которое происходит в соответствии с током, проходящим к нагревателю дороги, даже если вал 32a коронной шестерни фактически остановился, и транспортное средство остановилось. Между тем, в варианте осуществления в качестве датчиков 43 и 44 определения углового положения, для которых используются преобразователи или т.п., используются датчики, которые почти не чувствительны к воздействию магнитного поля от такого нагревателя дороги (например, датчики, определяющие угловые положения роторов электродвигателей MG1 и MG2 в соответствии с очень большим магнитным полем по сравнению с магнитным полем от нагревателя дороги). Соответственно, когда датчики 43 и 44 определения углового положения находятся в нормальном состоянии, определенные скорости Nm1 и Nm2 вращения электродвигателей MG1 и MG2 становятся, по существу, значением 0, когда электродвигатели MG1 и MG2 прекращают вращение.
Когда данные введены таким образом, значение флага F оценки ненормальности отклонения скорости вращения задается посредством обработки для оценки ненормальности отклонения скорости вращения, показанного на фиг.4 в качестве примера, на основе определенной скорости Nodet вращения вала 32a коронной шестерни и определенной скорости Nm2det вращения электродвигателя MG2, которые являются входными данными (этап S110). Флаг F оценки ненормальности отклонения скорости вращения является флагом, показывающим, имеют или нет определенная скорость Nodet вращения вала 32a коронной шестерни и определенная скорость Nm2det вращения электродвигателя нормальные значения. Значение 0 задается, когда определенная скорость Nodet вращения вала 32a коронной шестерни и определенная скорость Nm2det вращения электродвигателя MG2 имеют нормальные значения, а значение 1 задается, когда, по меньшей мере, одно значение из определенной скорости Nodet вращения вала 32a коронной шестерни и определенной скорости Nm2det вращения электродвигателя MG2 не является нормальным. Далее описание алгоритма оценки остановки транспортного средства согласно фиг.3 временно прекращается, и будет описана обработка для оценки ненормальности отклонения скорости вращения согласно фиг.4.
В обработке для оценки ненормальности отклонения скорости вращения сначала проверяется значение флага F2 оценки неопределяемости скорости вращения второго электродвигателя (этап 300), и когда флаг F2 оценки неопределяемости скорости вращения второго электродвигателя имеет значение 0, вычисленная скорость Nm2est вращения, которая является скоростью вращения электродвигателя MG2, вычисленной на основе определенной скорости Nodet вращения вала 32a коронной шестерни, вычисляется посредством умножения определенной скорости Nodet вращения вала 32a коронной шестерни на передаточное отношение Gr (передаточное отношение Glo состояния Lo передачи или передаточное число Ghi состояния Hi передачи) трансмиссии 60 (этап S310), и вычисляется отклонение ΔNm2(=|Nm2det-Nm2est|) скорости вращения в качестве отклонения между определенной скоростью Nm2det вращения и вычисленной скоростью Nm2est вращения электродвигателя MG2 (этап S320). Впоследствии отклонение ΔNm2 скорости вращения сравнивается с пороговым значением ΔNm2ref (этап S330), и когда отклонение ΔNm2 скорости вращения больше, чем пороговое значение ΔNm2ref, оценивается, продолжается или нет это состояние в течение заданного времени (этап S340). Здесь пороговое значение ΔNm2ref является пороговым значением, которое используется для оценки того, является ли нормальным или нет отклонение между определенной скоростью Nm2det вращения и вычисленной скоростью Nm2est вращения электродвигателя MG2, т.е. имеют или нет определенная скорость Nm2 вращения, вычисленная на основе сигнала от датчика 44 определения углового положения, и определенная скорость Nodet вращения, вычисленная на основе сигнала от датчика 36 скорости вращения, нормальные значения, и пороговое значение может быть задано, например, в 450 оборотов в минуту (об/мин), 500 об/мин, 550 об/мин или т.п. Кроме того, заданное время является временем, требуемым для оценки того, что отклонение между определенной скоростью Nm2det вращения и вычисленной скоростью Nm2est вращения электродвигателя MG2 не является нормальным, и может быть задано, например, в 80 мсек, 100 мсек, 120 мсек или т.п. Теперь, принимая во внимание время, когда транспортное средство остановилось в положении, где нагреватель дороги размещен под дорогой, определенная скорость Nodet вращения вала 32a коронной шестерни иногда становится скоростью вращения в некоторой степени из-за влияния магнитного поля от нагревателя дороги, как описано выше, но определенная скорость Nm2det вращения электродвигателя MG2 становится, по существу, значением 0, и, следовательно, иногда возникает отклонение между определенной скоростью Nm2det вращения и вычисленной скоростью Nm2est вращения электродвигателя MG2. По причине, отличной от воздействия магнитного поля от нагревателя дороги, возникает отклонение между определенной скоростью Nm2det вращения электродвигателя MG2 или определенной скоростью Nodet вращения вала 32a коронной шестерни и соответствующими фактическими скоростями вращения, и в связи с этим иногда возникает отклонение между определенной скоростью Nm2det вращения и вычисленной скоростью Nm2est вращения электродвигателя MG2. Обработка на этапах S330 и S340 является обработкой оценки того, имеют или нет определенная скорость Nm2det вращения электродвигателя MG2 и определенная скорость Nodet вращения вала 32a коронной шестерни нормальные значения, посредством использования отклонения ΔNm2 скорости вращения. Даже когда отклонение ΔNm2 скорости вращения является пороговым значением ΔNm2ref или меньшим, или даже когда отклонение ΔNm2 скорости вращения больше, чем пороговое значение ΔNm2ref, если значение не сохраняется в течение заданного времени, оценивается, что определенная скорость Nm2det вращения электродвигателя MG2 и определенная скорость Nodet вращения вала 32a коронной шестерни обе имеют нормальные значения, и в флаге F1 оценки ненормальности отклонения скорости вращения задается значение 0 (этап S350), чтобы задать обработку оценки ненормальности отклонения скорости вращения. Между тем, когда состояние, в котором отклонение ΔNm2 скорости вращения больше, чем пороговое значение ΔNm2ref, сохраняется в течение заданного времени, или когда флаг F оценки неопределяемости скорости вращения второго электродвигателя имеет значение 1 на этапе S300, оценивается, что, по меньшей мере, одна из определенной скорости Nm2det вращения электродвигателя MG2 и определенной скорости Nodet вращения вала 32a коронной шестерни имеет ненормальное значение, или сама определенная скорость Nm2det вращения электродвигателя MG2 не может быть получена, и в флаге F1 оценки ненормальности отклонения скорости вращения задается значение 1 (этап S360), чтобы закончить обработку оценки ненормальности отклонения скорости вращения.
Когда последовательность операций возвращается к алгоритму оценки остановки транспортного средства на фиг.3 и флаг F1 оценки ненормальности отклонения скорости вращения задан на этапе S110, определяющая остановку скорость Noj вращения задается посредством обработки задания оцененной остановку скорости вращения, показанного на фиг.5 в качестве примера (этап S120). Здесь определяющая остановку скорость Noj вращения является скоростью вращения вала 32a коронной шестерни в качестве ведущего вала, которая используется, когда оценивается, остановилось или нет транспортное средство. Далее в данном документе описание алгоритма оценки остановки транспортного средства на фиг.3 временно прекращается и будет описана обработка для задания оцененной остановку скорости вращения на фиг.5.
В обработке для задания оцененной остановку скорости вращения сначала проверяется значение флага F1 оценки ненормальности отклонения скорости вращения (этап S400). Когда флаг F1 ненормальности отклонения скорости вращения имеет значение 0, т.е. когда определенная скорость Nm2det вращения электродвигателя MG2 и определенная скорость Nodet вращения вала 32a коронной шестерни обе имеют нормальные значения, определенная скорость Nodet вращения вала 32a коронной шестерни задается в качестве оцененной остановку скорости Noj вращения (этап S410), и обработка для задания оцененной остановку скорости вращения завершается.
Между тем, когда флаг F1 оценки ненормальности отклонения скорости вращения имеет значение 1, т.е. когда, по меньшей мере, одна из определенной скорости Nm2det вращения электродвигателя MG2 и определенной скорости Nodet вращения вала 32a коронной шестерни имеет ненормальное значение, проверяются значение флага Fne оценки неопределяемости скорости вращения двигателя и значение флага Fm1 оценки неопределяемости скорости вращения первого электродвигателя (этапы S420 и S430), и когда флаг Fne оценки неопределяемости скорости вращения двигателя и флаг Fm1 оценки неопределяемости скорости вращения первого электродвигателя оба имеют значение 0, т.е. когда определенная скорость Nedet вращения двигателя 22 может быть получена, и определенная скорость Nm1det вращения электродвигателя MG1 может быть получена, вычисленная скорость Noest вращения, которая является скоростью вращения вала 32a коронной шестерни в качестве ведущего вала, которая вычисляется на основе определенной скорости Nedet вращения двигателя 22 и определенной скорости Nm1 вращения электродвигателя MG1, вычисляется из следующей формулы (1) (этап S440), и вычисленная скорость Noest вращения задается в качестве оцененной остановку скорости Noj вращения (этап S450). Таким образом, обработка для задания оцененной остановку скорости вращения завершается. График, показывающий соотношение скоростей вращения во вращающихся элементах механизма 30 распределения и объединения энергии, показан на фиг.6. На чертеже ось S с левой стороны представляет скорость вращения солнечной шестерни 31, которая является скоростью вращения электродвигателя MG1, ось C представляет скорость вращения водила 34, которая является скоростью вращения двигателя 22, а ось R представляет скорость вращения коронной шестерни 32, которая получается делением скорости вращения электродвигателя MG2 на передаточное отношение Gr редуктора 35. Формула (1) может быть легко получена с помощью графика. Причиной, почему вычисленная скорость Noest вращения вала 32a коронной шестерни задается в качестве скорости Noj вращения, оцененной остановку, когда флаг F оценки ненормальности отклонения скорости вращения имеет значение 1, является то, что в обработке для оценки ненормальности отклонения скорости вращения на фиг.4 может быть оценено только то, что, по меньшей мере, одна из определенной скорости Nm2det вращения электродвигателя MG2 и определенной скорости Nodet вращения вала 32a коронной шестерни имеет ненормальное значение, или что определенная скорость Nm2det вращения электродвигателя MG2 сама не может быть получена, а именно не может быть оценено, является или нет определенная скорость Nodet вращения вала 32a коронной шестерни скоростью вращения, на которую оказывает воздействие магнитное поле от нагревателя дороги. Когда полагается, что транспортное средство остановилось в положении, где нагреватель дороги размещен под дорогой, определенная скорость Nedet вращения двигателя 22 становится в некоторой степени скоростью вращения, даже если двигатель 22 фактически останавливает вращение, как описано выше, и, следовательно, вычисленная скорость Noest вращения вала 32a коронной шестерни иногда не принимает значение 0.

Когда, по меньшей мере, один из флага Fne оценки неопределяемости скорости вращения двигателя и флага Fm1 оценки неопределяемости скорости вращения первого электродвигателя имеет значение 1 на этапах S420 и S430, а именно когда, по меньшей мере, одна из определенной скорости Nedet вращения двигателя 22 и определенной скорости Nm1det вращения электродвигателя MG1 не может быть получена, абсолютное значение определенной скорости Nodet вращения вала 32a коронной шестерни сравнивается с пороговым значением Noref (этап S460), тогда как, когда абсолютное значение определенной скорости Nodet вращения вала 32a коронной шестерни больше, чем пороговое значение Noref, определенная скорость Nodet вращения задается в качестве скорости Noj вращения, оцененной остановку (этап S470), и обработка для задания скорости вращения, оцененной остановку, завершается. Когда абсолютное значение определенной скорости Nodet вращения вала 32a коронной шестерни равно пороговому значению Noref или менее, значение 0 задается в качестве скорости Noj вращения, оцененной остановку (этап S480), и алгоритм задания скорости вращения, оцененной остановку, завершается. Здесь пороговое значение Noref задается равным скорости вращения или т.п., которая немного больше, чем определенная скорость Nodet вращения вала 32a коронной шестерни, которая определяется из-за воздействия магнитного поля от нагревателя дороги, когда транспортное средство остановилось в положении, где нагреватель дороги размещен под поверхностью дороги, и фиксируется заранее в ходе экспериментов или т.п. С помощью обработки на этапах S460 по S480 определенная скорость Nodet вращения вала 32a коронной шестерни задается в качестве скорости Noj вращения, оцененной остановку, когда транспортное средство едет с некоторой скоростью транспортного средства, или когда транспортное средство остановилось, значение 0 задается в качестве скорости Noj вращения, оцененной остановку, вместо определенной скорости Nodet вращения вала 32a коронной шестерни, на которую воздействует магнитное поле от нагревателя дороги.
Последовательность операций возвращается к описанию алгоритма оценки остановки транспортного средства на фиг.3. Когда скорость Noj вращения, определяющая остановку, задана на этапе S120, проверяется значение флага F1 оценки ненормальности отклонения скорости вращения (этап S130). Когда флаг F1 оценки ненормальности отклонения скорости вращения имеет значение 0, а именно когда определенная скорость Nm2det вращения электродвигателя MG2 и определенная скорость Nodet вращения вала 32a коронной шестерни имеют нормальное значение, заданная скорость N1 вращения задается в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки, как верхнее ограничение скорости вращения, с которой транспортное средство может быть оценено как остановившееся (этап S160). Впоследствии определяющая остановку скорость Noj вращения вала 32a коронной шестерни и скорость Nojmax вращения, задающая верхнее ограничение оценки остановки, сравниваются (этап S180). Когда абсолютное значение оцененной остановку скорости Noj вращения вала 32a коронной шестерни равно скорости Nojmax вращения, задающей верхнее ограничение оценки остановки, или меньше, оценивается, что транспортное средство остановилось (этап S190), и алгоритм оценки остановки транспортного средства завершается. Когда определяющая остановку скорость Noj вращения вала 32a коронной шестерни больше, чем скорость Nojmax вращения, задающая верхнее ограничение оценки остановки, оценивается, что транспортное средство не остановилось, что транспортное средство движется (этап S200), и алгоритм оценки остановки транспортного средства завершается. Здесь заданная скорость N1 вращения является верхним ограничением скорости вращения вала 32a коронной шестерни, с которой может быть оценено, что транспортное средство не подвержено воздействию магнитного поля от нагревателя дороги, и фиксируется заранее в ходе экспериментов или т.п. Когда флаг F1 оценки ненормальности отклонения скорости вращения имеет значение 0, когда определенная скорость Nm2det вращения электродвигателя MG2 и определенная скорость Nodet вращения вала 32a коронной шестерни имеют нормальные значения, определенная скорость Nodet вращения вала 32a коронной шестерни задается в качестве скорости Noj вращения, оцененной остановку, посредством обработки для задания скорости вращения, оцененной остановку, на фиг.5, описанной выше, и, следовательно, оценивается, остановилось или нет транспортное средство, с помощью определенной скорости Nodet вращения вала 32a коронной шестерни.
Когда транспортное средство оценивается, таким образом, как остановившееся, гибридный электронный блок 70 управления выполняет первый алгоритм обработки во время оценки остановки транспортного средства, который показан на фиг.7 в качестве примера, и второй алгоритм обработки во время оценки остановки транспортного средства, который показан на фиг.8 в качестве примера, параллельно с алгоритмом оценки остановки транспортного средства на фиг.3. В первом алгоритме обработки во время оценки остановки транспортного средства на фиг.7 вводится положение SP переключателя режимов трансмиссии (этап S500), и введенное положение SP переключателя режимов трансмиссии проверяется (этап S510). Когда положение SP переключателя режимов трансмиссии является P-положением, ведущие колеса 39a и 39b блокируются механизмом 90 блокировки трансмиссии на стоянке (этап S520), а когда положение SP переключателя режимов трансмиссии является отличным от P-положения, настоящий алгоритм завершается без блокировки ведущих колес 39a и 39b. Кроме того, во втором алгоритме обработки во время оценки остановки транспортного средства на фиг.8 вводится состояние замка 80 зажигания (этап S600) и оценивается, выключено или нет зажигание, на основе введенного состояния замка 80 зажигания (этап S610). Когда оценивается, что зажигание не выключено, последовательность операций возвращается к обработке на этапе S600, а когда оценивается, что зажигание выключено, главное реле 56 системы отключается (этап S610), и текущий алгоритм завершается. Более конкретно, в алгоритмах согласно фиг.7 и 8, которые выполняются, когда транспортное средство оценено как остановившееся, когда положение SP переключателя режимов трансмиссии изменяется в P-положение водителем, ведущие колеса 39a и 39b блокируются механизмом 90 блокирования трансмиссии на стоянке в ответ на изменение переключения режимов трансмиссии, и когда зажигание выключается водителем, главное реле 56 системы отключается. В варианте осуществления, когда оценено, что транспортное средство не остановилось, транспортное средство движется, ведущие колеса 39a и 39b не блокируются механизмом 90 блокирования трансмиссии на стоянке, даже если положение SP переключателя режимов трансмиссии управляется, чтобы переключиться в P-положение, и главное реле 56 системы не отключается, даже если зажигание выключено.
Последовательность операций возвращается к описанию алгоритма остановки транспортного средства на фиг.3. Когда флаг F1 оценки ненормальности отклонения скорости вращения имеет значение 1 на этапе S130, т.е. когда, по меньшей мере, одно из значений определенной скорости Nm2det вращения электродвигателя MG2 и определенной скорости Nodet вращения вала 32a коронной шестерни не является нормальным, проверяется значение флага Fm2 оценки неопределяемости скорости вращения второго электродвигателя (этап S140), и когда флаг Fm2 оценки неопределяемости скорости вращения второго электродвигателя имеет значение 0, а именно когда определенная скорость Nm2det вращения электродвигателя MG2 может быть получена, абсолютное значение определенной скорости Nm2det вращения электродвигателя MG2 сравнивается с пороговым значением Nm2ref (этап S150). Здесь пороговое значение Nm2ref является верхним ограничением абсолютного значения скорости вращения электродвигателя MG2, с которой транспортное средство может быть оценено как остановившееся, и фиксируется заранее в ходе эксперимента или т.п. В варианте осуществления скорость вращения, которая получена умножением заданной скорости N1 вращения на передаточное отношение Gr трансмиссии 60 или т.п., задается в качестве порогового значения Nm2ref. Датчик 44 определения углового положения не подвержен воздействию магнитного поля от нагревателя дороги, и, следовательно, в этом случае обработка на этапах S140 и S150 является обработкой оценки того, остановилось или нет транспортное средство с помощью определенной скорости Nm2det вращения электродвигателя MG2, которая не подвержена воздействию такого магнитного поля.
Когда флаг Fm2 оценки неопределяемости скорости вращения второго электродвигателя имеет значение 0 и абсолютное значение определенной скорости Nm2det вращения электродвигателя MG2 равно пороговому значению Nm2ref или менее, делается вывод о том, что транспортное средство оценено как остановившееся, если оценивается, остановилось или нет транспортное средство, с помощью определенной скорости Nm2det вращения электродвигателя MG2. Таким образом, заданная скорость N2 вращения, которая больше, чем выше заданная скорость N1 вращения, задается в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки (этап S170), и определяющая остановку скорость Noj вращения вала 32a коронной шестерни и скорость Nojmax вращения, задающая верхнее ограничение оценки остановки, сравниваются (этап S180). Когда абсолютное значение оцененной остановку скорости Noj вращения вала 32a коронной шестерни равно скорости Nojmax вращения, задающей верхнее ограничение оценки остановки, или меньше, оценивается, что транспортное средство остановилось (этап S190), и алгоритм оценки остановки транспортного средства завершается. Когда определяющая остановку скорость Noj вращения вала 32a коронной шестерни больше, чем скорость Nojmax вращения, задающая верхнее ограничение оценки остановки, оценивается, что транспортное средство не остановилось, что транспортное средство движется (этап S200), и алгоритм оценки остановки транспортного средства завершается. Здесь заданная скорость N2 вращения является верхним ограничением скорости вращения вала 32a коронной шестерни, с которой оценивается, что транспортное средство остановилось, когда транспортное средство подвержено воздействию магнитного поля от нагревателя дороги, задается равной скорости вращения, которая немного больше, чем определенная скорость Nodet вращения и вычисленная скорость Noest вращения вала 32a коронной шестерни, которая определяется и вычисляется, когда транспортное средство остановилось в положении, где нагреватель дороги размещен под дорогой, и фиксируется заранее в ходе экспериментов или т.п.
Теперь рассматривается случай, в котором транспортное средство остановилось в положении, где нагреватель дороги размещен под поверхностью дороги, определенная скорость Nedet вращения двигателя 22 может быть получена, и определенная скорость Nm1de вращения электродвигателя MG1 может быть получена. В это время, когда значение 1 устанавливается в флаг F1 оценки ненормальности отклонения скорости вращения посредством обработки для оценки ненормальности отклонения скорости вращения на фиг.4, особенно когда оценивается, что, по меньшей мере, одна из определенной скорости Nm2det вращения электродвигателя MG2 и определенной скорости Nodet вращения вала 32a коронной шестерни не имеет нормальное значение, вычисленная скорость Noest вращения вала 32a коронной шестерни, которая вычисляется из формулы (1) на основе определенной скорости Nedet вращения двигателя 22 и определенной скорости Nm1det вращения электродвигателя MG1, задается в качестве оцененной остановку скорости No вращения посредством обработки для задания скорости вращения оценки остановки на фиг.5. Здесь определенная скорость Nedet вращения двигателя 22 иногда не становится значением 0 из-за воздействия магнитного поля от нагревателя дороги, и в этом случае, согласно графику с фиг.6, скорость вращения, соответствующая определенной скорости Ne вращения двигателя 22 и определенной скорости Nm1 вращения электродвигателя MG1, является вычисленной скоростью Noest вращения вала 32a коронной шестерни. Соответственно, если заданная скорость N1 вращения, которая является относительно небольшой, задается в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки, независимо от значения флага F оценки ненормальности отклонения скорости вращения, оценивается, что транспортное средство движется, даже если транспортное средство остановилось, и может случиться, что ведущие колеса 39a и 39b не блокируются механизмом 90 блокировки трансмиссии на стоянке с помощью операции переключения режимов трансмиссии в P-положение из положения SP переключателя режимов трансмиссии, или главное реле 56 системы не отключается, когда зажигание выключено. Чтобы устранить такое неудобство, в варианте осуществления, когда, по меньшей мере, одна из определенной скорости Nm2det вращения электродвигателя MG2 и определенной скорости Nodet вращения вала 32a коронной шестерни не является нормальным значением, и когда определенная скорость Nm2det вращения электродвигателя MG2 может быть получена, и абсолютное значение определенной скорости Nm2det вращения электродвигателя MG2 является пороговым значением Nm2ref или меньшим, а именно когда может быть сделан вывод, что транспортное средство оценено как остановившееся, если используется определенная скорость Nm2det вращения электродвигателя MG2, заданная скорость N2 вращения, которая больше, чем заданная скорость N1 вращения, задается в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки, и оценивается, остановилось или нет транспортное средство, с помощью вычисленной скорости Noest вращения вала 32a коронной шестерни или скорости Noj вращения, оцененной остановку, которой задается значение 0, и скорости Nojmax вращения, задающей верхнее ограничение оценки остановки. Таким образом, даже когда определенная скорость Nedet вращения двигателя 22 и определенная скорость Nodet вращения вала 32a коронной шестерни соответственно формируют отклонения от фактических скоростей вращения из-за воздействия магнитного поля от нагревателя дороги, может быть правильно оценено, остановилось или нет транспортное средство. Как результат, более правильная реакция может быть реализована на операцию переключения в P-положение из положения SP переключателя режимов трансмиссии водителем и выключения зажигания. Когда заданная скорость N2 вращения, которая больше, чем заданная скорость N1 вращения, задается в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки, независимо от значения флага F оценки ненормальности отклонения скорости вращения, диапазон скорости вращения вала 32a коронной шестерни, с которой транспортное средство оценивается как остановившееся, увеличивается, диапазон, в котором ведущие колеса 39a и 39b блокируются, когда положение SP переключателя режимов трансмиссии управляется, чтобы переключиться в P-положение, расширяется, и существует вероятность неожиданности для водителя. Следовательно, когда определенная скорость Nodet вала 32a коронной шестерни не подвержено воздействию магнитного поля от нагревателя дороги, желательно задать относительно небольшую заданную скорость N1 вращения в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки.
Когда флаг Fm2 оценки неопределяемости скорости вращения второго электродвигателя имеет значение 1 на этапах S140 и S150, а именно когда определенная скорость Nm2det вращения электродвигателя MG2 не может быть получена, или когда флаг Fm2 оценки неопределяемости скорости вращения второго электродвигателя имеет значение 0, и абсолютное значение определенной скорости Nm2det вращения электродвигателя MG2 больше, чем пороговое значение Nm2ref, заданная скорость N1 вращения задается в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки (этап S160), определяющая остановку скорость Noj вращения вала 32a коронной шестерни и скорость Nojmax вращения, задающая верхнее ограничение оценки остановки, сравниваются (этап S180). Когда абсолютное значение оцененной остановку скорости Noj вращения вала 32a коронной шестерни равно скорости Nojmax вращения, задающей верхнее ограничение оценки остановки, или меньше, оценивается, что транспортное средство остановилось (этап S190), и алгоритм оценки остановки транспортного средства завершается. Когда определяющая остановку скорость Noj вращения вала 32a коронной шестерни больше, чем скорость Nojmax вращения, задающая верхнее ограничение оценки остановки, оценивается, что транспортное средство не остановилось, что транспортное средство движется (этап S200), и алгоритм оценки остановки транспортного средства завершается. В этих случаях в качестве оцененной остановку скорости Noj вращения любая из вычисленной скорости Noest вращения и определенной скорости Nodet вращения вала 32a коронной шестерни и значение 0 задается посредством обработки для задания оцененной остановку скорости вращения на фиг.5. Причинами использования заданной скорости N1 вращения в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки, в этих случаях являются следующие. Первое, когда определенная скорость Nm2det вращения электродвигателя MG2 не может быть получена, причина, почему флаг F оценки ненормальности отклонения скорости вращения имеет значение 1, не может быть вычислена, а именно не может быть вычислено, установлено или нет значение 1 в качестве флага F оценки ненормальности отклонения скорости вращения из-за того факта, что скорость Nodet вращения вала 32a коронной шестерни является скоростью вращения, которая подвержена воздействию магнитного поля от нагревателя дороги. Кроме того, когда абсолютное значение определенной скорости Nm2det вращения электродвигателя MG2 больше, чем пороговое значение Nm2ref, может быть обычным путем вычислено, что транспортное средство оценено как движущееся, если оценивается, остановилось или нет транспортное средство, с помощью определенной скорости Nm2det вращения электродвигателя MG2, которая не подвержена воздействию магнитного поля от нагревателя дороги, и, следовательно, если оценивается, остановилось или нет транспортное средство, с помощью заданной скорости N2 вращения, легко оценивается, что транспортное средство остановилось, когда транспортное средство фактически движется.
Согласно гибридному транспортному средству 20 варианта осуществления, описанного выше, когда определенная скорость Nm2det вращения электродвигателя MG2 и определенная скорость Nodet вращения вала 32a коронной шестерни имеют нормальные значения, оценивается, остановилось или нет транспортное средство, на основе того, является или нет абсолютное значение оцененной остановку скорости Noj вращения вала 32a коронной шестерни в качестве ведущего вала заданной скоростью N1 вращения или меньшей, и когда, по меньшей мере, одно значение из определенной скорости Nm2det вращения электродвигателя MG2 и определенной скорости Nodet вращения вала 32a коронной шестерни не является нормальным, оценивается, остановилось или нет транспортное средство, на основе того, является или нет абсолютное значение оцененной остановку скорости Noj вращения вала 32a коронной шестерни в качестве ведущего вала заданной скоростью N2 вращения, которая больше, чем заданная скорость N1 вращения, или меньшим. Следовательно, может быть более точно оценено, остановилось или нет транспортное средство, по сравнению с тем, когда оценивается, остановилось или нет транспортное средство, посредством использования заданной скорости N1 вращения независимо от того, имеют или нет определенная скорость Nm2det вращения электродвигателя MG2 и определенная скорость Nodet вращения вала 32a коронной шестерни нормальные значения.
Кроме того, согласно гибридному транспортному средству 20 варианта осуществления оценивается, имеют или нет определенная скорость Nm2det вращения электродвигателя MG2 и определенная скорость Nodet вращения вала 32a коронной шестерни нормальные значения, на основе отклонения ΔNm2 скорости вращения в качестве отклонения определенной скорости Nm2det вращения и вычисленной скорости Nm2est вращения (=Nodet·Gr) электродвигателя MG2. Следовательно, даже если зажигание включено, может быть оценено, имеют или нет определенная скорость Nm2det вращения электродвигателя MG2 и определенная скорость Nodet вращения вала 32a коронной шестерни нормальные значения. Оценивается, остановилось или нет транспортное средство, с принятием во внимание результата, определенного таким образом, и, следовательно, операция переключения режимов трансмиссии в P-положение переключателя SP передач водителем и выключение зажигания могут обрабатываться более точно.
Кроме того, согласно гибридному транспортному средству 20 варианта осуществления определяющая остановку скорость Noj вращения задается на основе того, имеют или нет определенная скорость Nm2det вращения электродвигателя MG2 и определенная скорость Nodet вращения вала 32a коронной шестерни нормальные значения, и могут или нет быть получены определенная скорость Nedet вращения двигателя 22 и определенная скорость Nm1det вращения электродвигателя MG1, и, следовательно, определяющая остановку скорость Noj вращения может быть более правильно задана в соответствии с тем, подвержено или нет транспортное средство воздействию от нагревателя дороги, состояниями датчика 23 положения коленчатого вала и датчика 43 определения углового положения и т.п. Кроме того, когда, по меньшей мере, одна из определенной скорости Nm2det вращения электродвигателя MG2 и определенной скорости Nodet вращения вала 32a коронной шестерни не имеет нормальное значение, и, по меньшей мере, одна из определенной скорости Nedet вращения двигателя 22 и определенной скорости Nm1det вращения электродвигателя MG1 не может быть получена, определенная скорость Nodet вращения или значение 0 задается в качестве оцененной остановку скорости Noj вращения на основе результата сравнения определенной скорости Nodet вращения вала 32a коронной шестерни с пороговым значением Noref, для которого скорость вращения, которая немного больше, чем определенная скорость Nodet вращения вала 32a коронной шестерни, которая определяется из-за воздействия магнитного поля от нагревателя дороги, когда транспортное средство остановилось в положении, где нагреватель дороги размещен под поверхностью дороги. Следовательно, может быть более достоверно оценено, что транспортное средство остановилось, когда транспортное средство фактически остановилось.
В гибридном транспортном средстве 20 согласно варианту осуществления значение 1 задается в флаг F1 оценки ненормальности отклонения скорости вращения, когда состояние, в котором отклонение ΔNm2 скорости вращения в качестве отклонения между определенной скоростью Nm2det вращения электродвигателя MG2 и вычисленной скоростью Nm2est(=Nodet·Gr) вращения электродвигателя MG2 больше, чем пороговое значение ΔNm2ref сохраняется в течение заданного времени. Однако, когда отклонение ΔNm2 скорости вращения больше, чем пороговое значение ΔNm2ref, значение 1 может быть задано в качестве флага F1 оценки ненормальности отклонения скорости вращения без ожидания продолжения в течение заданного времени.
В гибридном транспортном средстве 20 согласно варианту осуществления, когда флаг F1 оценки ненормальности отклонения скорости вращения имеет значение 0, определенная скорость Nodet вращения вала 32a коронной шестерни в качестве ведущего вала задается как определяющая остановку скорость Noj вращения, но вместо этого вычисленная скорость Noest2 вращения вала 32a коронной шестерни, которая получается делением определенной скорости Nm2det вращения электродвигателя MG2 на передаточное отношение Gr трансмиссии 60, может быть задано в качестве оцененной остановку скорости Noj вращения.
В гибридном транспортном средстве 20 согласно варианту осуществления, когда флаг F1 оценки ненормальности отклонения скорости вращения имеет значение 1, если флаг Fne оценки неопределяемости скорости вращения двигателя и флаг Fm1 оценки неопределяемости скорости вращения первого электродвигателя имеют значение 0, вычисленная скорость Noest2 вращения, которая вычисляется с помощью определенной скорости Ne вращения двигателя 22 и определенной скорости Nm1 вращения электродвигателя MG1, задается в качестве оцененной остановку скорости Noj вращения. Однако вместо этого определенная скорость Nodet вращения вала 32a коронной шестерни может быть задана в качестве оцененной остановку скорости Noj вращения.
В гибридном транспортном средстве 20 согласно варианту осуществления, когда флаг F1 оценки ненормальности отклонения скорости вращения имеет значение 1, и, по меньшей мере, один из флага Fne оценки неопределяемости скорости вращения двигателя и флага Fm1 оценки неопределяемости скорости вращения первого электродвигателя имеет значение 1, определенная скорость Nodet вращения задается в качестве оцененной остановку скорости Noj вращения, когда абсолютное значение определенной скорости Nodet вращения вала 32a коронной шестерни больше, чем пороговое значение Noref, а значение 0 задается в качестве оцененной остановку скорости Noj вращения, когда абсолютное значение определенной скорости Nodet вращения вала 32a коронной шестерни является пороговым значением Noref или меньшим. Однако независимо от абсолютного значения определенной скорости Nodet вращения вала 32a коронной шестерни определенная скорость Nodet вращения может быть задана в качестве оцененной остановку скорости Noj вращения.
В гибридном транспортном средстве 20 согласно варианту осуществления, когда флаг F1 оценки ненормальности отклонения скорости вращения имеет значение 1, заданная скорость N1 вращения задается в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки, когда флаг Fm2 оценки неопределяемости скорости вращения второго электродвигателя имеет значение 0, и абсолютное значение определенной скорости Nm2det вращения электродвигателя MG2 имеет пороговое значение Nm2ref или меньшее, и когда флаг Fm2 оценки неопределяемости скорости вращения второго электродвигателя имеет значение 1, а когда флаг Fm2 оценки неопределяемости скорости вращения второго электродвигателя имеет значение 0, и абсолютное значение определенной скорости Nm2det вращения электродвигателя MG2 больше, чем пороговое значение Nm2ref, заданная скорость N2 вращения задается в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки. Однако, когда вычисленная скорость Noest вращения вала 32a коронной шестерни задана в качестве оцененной остановку скорости Noj вращения, и двигатель 22 работает, заданная скорость N1 вращения может быть задана в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки. Один пример алгоритма оценки остановки транспортного средства в этом случае показан на фиг.9. Алгоритм на фиг.9 является таким же, что и алгоритм оценки остановки транспортного средства на фиг.3, за исключением конфигурации, в которую добавлена обработка на этапах S700 и S710. Соответственно, будет описано главным образом отличие конфигурации от алгоритма фиг.3. Согласно алгоритму с фиг.9, та же обработка, что и в алгоритме на фиг.3, обозначена теми же ссылочными позициями и символами. В алгоритме на фиг.9, когда флаг F оценки ненормальности отклонения скорости вращения имеет значение 1 на этапе S130, оценивается, равна или нет определяющая остановку скорость Noj вращения, заданная на этапе S120, вычисленной скорости Noest вращения, а именно задана или нет вычисленная скорость Noest вращения в качестве оцененной остановку скорости Noj вращения (этап S700), и когда определяющая остановку скорость Noj вращения равна вычисленной скорости Noest вращения, оценивается, остановился или нет двигатель 22 (этап S710). Когда оценивается, что двигатель 22 не остановился, а именно двигатель 22 работает, заданная скорость N1 вращения задается в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки (этап S160). Когда оценивается, что двигатель 22 остановился, выполняется обработка на этапах S140 и S150, и заданная скорость N1 вращения или заданная скорость N2 вращения задается в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки (этапы S160 и S170). Здесь, когда вычисленная скорость Noest задана в качестве оцененной остановку скорости Noj вращения, и двигатель 22 работает, заданная скорость N1 вращения может быть задана в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки. Это потому, что датчик 23 положения коленчатого вала сконфигурирован как датчик с электромагнитным чувствительным элементом, и, следовательно, определенная скорость Nedet вращения двигателя 22 рассматривается обычно, по существу, равной фактической скорости вращения двигателя 22 без значительного воздействия магнитного поля от нагревателя дороги, когда двигатель 22 работает, а именно, когда двигатель 22 вращается с некоторой степенью скорости вращения.
В гибридном транспортном средстве 20 согласно варианту осуществления, когда флаг F оценки ненормальности отклонения скорости вращения имеет значение 1, заданная скорость N1 вращения задается в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки, когда флаг Fm2 оценки неопределяемости скорости вращения второго электродвигателя имеет значение 0, и абсолютное значение определенной скорости Nm2det вращения электродвигателя MG2 имеет пороговое значение Nm2ref или меньшее, и когда флаг Fm2 оценки неопределяемости скорости вращения второго электродвигателя имеет значение 1, а когда флаг Fm2 оценки неопределяемости скорости вращения второго электродвигателя имеет значение 0, и абсолютное значение определенной скорости Nm2det вращения электродвигателя MG2 больше, чем пороговое значение Nm2ref, заданная скорость N2 вращения задается в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки, но заданная скорость N2 вращения может быть задана в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки, независимо от флага Fm2 оценки неопределяемости скорости вращения второго электродвигателя и определенной скорости Nm2det вращения электродвигателя MG2.
В гибридном транспортном средстве 20 варианта осуществления значение, вычисленное ЭБУ 24 двигателя на основе сигнала от датчика 23 положения коленчатого вала, используется в качестве определенной скорости Nedet вращения двигателя 22, но значение, которое определяется ЭБУ 24 двигателя на основе сигнала от датчика, такого как датчик угла кулачка (не показан), который определяет угол кулачка, будучи установленным на неиллюстрированный распределительный вал двигателя 22, может быть использовано в качестве определенной скорости Nedet вращения двигателя 22. Здесь, когда датчик угла кулачка является датчиком, который передает сигнал гибридному электронному блоку 70 управления, значение, вычисленное на основе сигнала от датчика угла кулачка гибридным электронным блоком 70 управления, используется в качестве определенной скорости Nedet вращения двигателя 22.
В гибридном транспортном средстве 20 варианта осуществления трансмиссия 60 способна изменять скорость с помощью двух ступеней скорости - Hi и Lo, но ступени скорости трансмиссии 60 не ограничены двумя ступенями, и три или более ступеней скорости могут быть приняты.
В гибридном транспортном средстве 20 варианта осуществления энергия электродвигателя MG2 преобразуется в скорость посредством трансмиссии 60 и выводится на вал 32a коронной шестерни, но, как показано в качестве примера в гибридном транспортном средстве 20 модифицированного варианта осуществления на фиг.10, энергия электродвигателя MG2 преобразуется в скорость посредством трансмиссии 60 и может быть передана оси (оси, соединенной с ведущими колесами 39c и 39d на фиг.10), отличающейся от оси (оси, с которой соединены ведущие колеса 39a и 39b), с которой соединен вал 32a коронной шестерни.
В гибридном транспортном средстве 20 варианта осуществления энергия двигателя 22 выводится на вал 32a коронной шестерни в качестве ведущего вала, соединенного с ведущими колесами 39a и 39b, через механизм 30 распределения и объединения энергии, но, как показано в качестве примера, в гибридное транспортное средство 220 модифицированного варианта осуществления на фиг.11 может быть включен двухроторный электродвигатель 230, который имеет внутренний ротор 232, соединенный с коленчатым валом 26 двигателя 22, и внешний ротор 234, соединенный с ведущим валом, который выводит энергию на ведущие колеса 39a и 39b и передает часть энергии двигателя 22 ведущему валу и преобразует оставшуюся энергию в электрическую энергию.
В гибридном транспортном средстве 20 согласно варианту осуществления энергия от электродвигателя MG2 изменяется в скорости вращения посредством трансмиссии 60 и выводится на вал 32a коронной шестерни, но энергия от электродвигателя MG2 может быть понижена в скорости вращения посредством редуктора и может быть выведена на вал 32a коронной шестерни, или энергия от электродвигателя MG2 может быть непосредственно выведена на вал 32a коронной шестерни без изменения в скорости вращения.
В варианте осуществления описано гибридное транспортное средство 20, которое движется за счет энергии от двигателя и энергии от электродвигателя, но настоящее изобретение может быть применено к транспортному средству, которое движется за счет энергии только от электродвигателя.
Здесь будут описаны соответствие основных элементов варианта осуществления и модифицированного варианта осуществления и основные элементы изобретения, описанные в разделе "Раскрытие изобретения". В варианте осуществления двигатель 22 соответствует "двигателю внутреннего сгорания", механизм 30 распределения и объединения энергии, который соединен с коленчатым валом 26 в качестве выходного вала двигателя 22 и соединен с валом 32a коронной шестерни в качестве ведущего вала, соединенного с ведущими колесами 39a и 39b и электродвигателем MG1, соединенным с механизмом 30 распределения и объединения энергии, соответствует "модулю регулирования вращения", электродвигатель GM2 соответствует "электродвигателю", трансмиссия 60, соединенная с электродвигателем MG2 и валом 32a коронной шестерни в качестве ведущего вала, соответствует "модулю передачи энергии", датчик 36 скорости вращения и гибридный электронный блок 70 управления, которые определяют скорость вращения вала 32a коронной шестерни в качестве определенной скорости Nodet вращения, датчик 23 положения коленчатого вала и ЭБУ 24 двигателя, которые определяют скорость вращения двигателя 22 как определенную скорость Nedet вращения, датчик 43 определения углового положения и ЭБУ 40 электродвигателя, которые определяют скорость вращения электродвигателя MG1 как определенную скорость Nm1det вращения, и гибридный электронный блок 70 управления, который вычисляет скорость вращения вала 32a коронной шестерни как вычисленную скорость Noest вращения на основе определенной скорости Nedet вращения и определенной скорости Nm1det вращения, соответствуют "модулю определения и вычисления скорости вращения ведущего вала", и датчик 44 определения углового положения и ЭБУ 40 электродвигателя, которые определяют скорость вращения электродвигателя MG2 как определенную скорость Nm2det вращения, соответствуют "модулю определения скорости вращения электродвигателя", гибридный электронный блок 70 управления, который выполняет обработку для оценки ненормальности отклонения скорости вращения на этапе S110 для оценки того, оценивает ли обработка на этапе S110 то, что имеют или нет определенная скорость Nodet вращения вала 32a коронной шестерни и определенная скорость Nm2det вращения электродвигателя MG2 нормальные значения, на основе определенной скорости Nodet вращения вала 32a коронной шестерни и определенной скорости Nm2det вращения электродвигателя MG2, соответствует "модулю оценки скорости вращения". Гибридный электронный блок 70 управления, который выполняет обработку на этапах S130, S160 и S170 для задания заданной скорости N1 вращения в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки, когда определенная скорость Nodet вращения вала 32a коронной шестерни и определенная скорость Nm2det вращения электродвигателя MG2 оценены как нормальные, и задания заданной скорости N2 вращения, которая больше, чем заданная скорость N1 вращения, в качестве скорости Nojmax вращения, задающей верхнее ограничение оценки остановки, когда оценивается, что, по меньшей мере, одна из определенной скорости Nodet вращения вала 32a коронной шестерни и определенной скорости Nm2det вращения электродвигателя MG2 не имеет нормальное значение, соответствует "модулю задания диапазона оценки остановки". Гибридный электронный блок 70 управления, который на этапах S120 и S180-S200 выполняет обработку для задания любой из определенной скорости Nodet вращения и вычисленной скорости Noest вращения вала 32a коронной шестерни и значения 0 в качестве оцененной остановку скорости Noj вращения и оценки того, остановилось или нет транспортное средство, на основе результата сравнения оцененной остановку скорости Noj вращения, которая задана, и скорости Nojmax вращения, задающей верхнее ограничение оценки остановки, соответствует "модулю оценки остановки транспортного средства". Кроме того, механизм 90 блокировки трансмиссии на стоянке, который блокирует и освобождает ведущие колеса 39a и 39b, соответствует "модулю блокировки", а аккумуляторная батарея 50, способная заряжать и расходовать электрическую энергию, соответствует "аккумулятору". Главное реле 56 системы, которое отключает подачу электрической энергии от аккумуляторной батареи 50 к инверторам 41 и 42, которые управляют электродвигателями MG1 и MG2, соответствует "модулю отключения и соединения". Гибридный электронный блок 70 управления, который на этапах S500-S520 выполняет процесс блокировки ведущих колес 39a и 39b посредством механизма 90 блокировки трансмиссии на стоянке в ответ на изменение положения переключателя режимов трансмиссии, когда транспортное средство оценено как остановившееся, и положение SP переключателя режимов трансмиссии изменяется водителем на P-положение, соответствует "модулю управления парковкой". Гибридный электронный блок 70 управления, который на этапах S600-S620 выполняет процесс отключения главного реле 56 системы, когда зажигание выключается, в то время как транспортное средство оценивается как остановившееся, соответствует "модулю управления отключением". В модифицированном варианте осуществления гибридный электронный блок 70 управления, который задает определенную скорость Nm2 вращения электродвигателя MG2 в качестве оцененной остановку скорости Noj вращения вместо определенной скорости Nodet вращения вала 32a коронной шестерни, когда флаг F оценки ненормальности отклонения скорости вращения имеет значение 0, соответствует "модулю оценки остановки транспортного средства". Соответствие основных элементов варианта осуществления и модифицированного варианта осуществления и основные элементы изобретения, описанные в разделе "Раскрытие изобретения", не ограничивают элементы изобретения, описанные в разделе "Раскрытие изобретения", так как вариант осуществления является одним примером для конкретного описания оптимального режима осуществления изобретения, описанного в разделе "Раскрытие изобретения". Более конкретно, толкование изобретения, описанного в разделе "Раскрытие изобретения", должно выполняться на основе описания раздела, а вариант осуществления является только одним примером изобретения, описанного в разделе "Раскрытие изобретения".
В варианте осуществления настоящее изобретение описано как режим гибридного транспортного средства 20, но оно может быть описано как форма транспортного средства, отличного от автомобиля, или может быть описано как режим способа управления транспортным средством, таким как гибридное транспортное средство 20.
Варианты осуществления настоящего изобретения были описаны со ссылкой на чертежи, хотя настоящее изобретение не ограничено вышеуказанными вариантами осуществления. Очевидно, что в настоящем изобретении могут быть сделаны различные модификации без выхода за рамки и из объема настоящего изобретения.
Промышленная применимость
Настоящее изобретение может использоваться в отрасли производства транспортных средств и т.п.
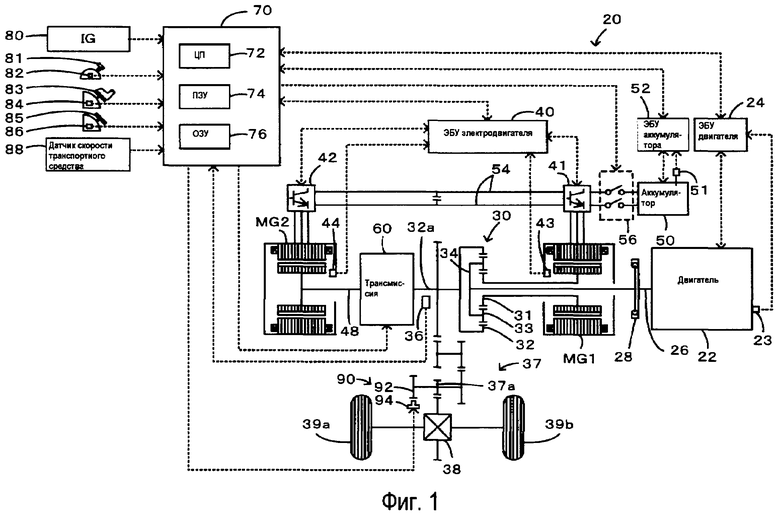
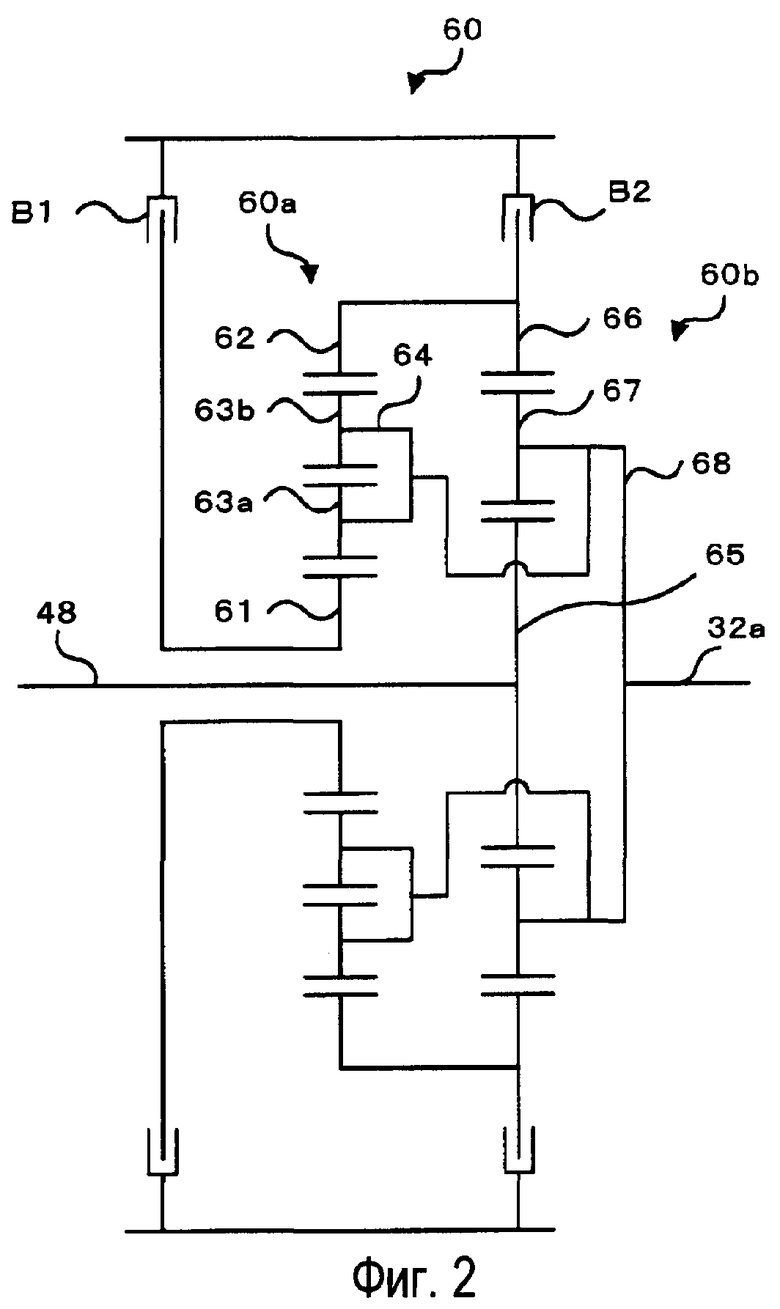
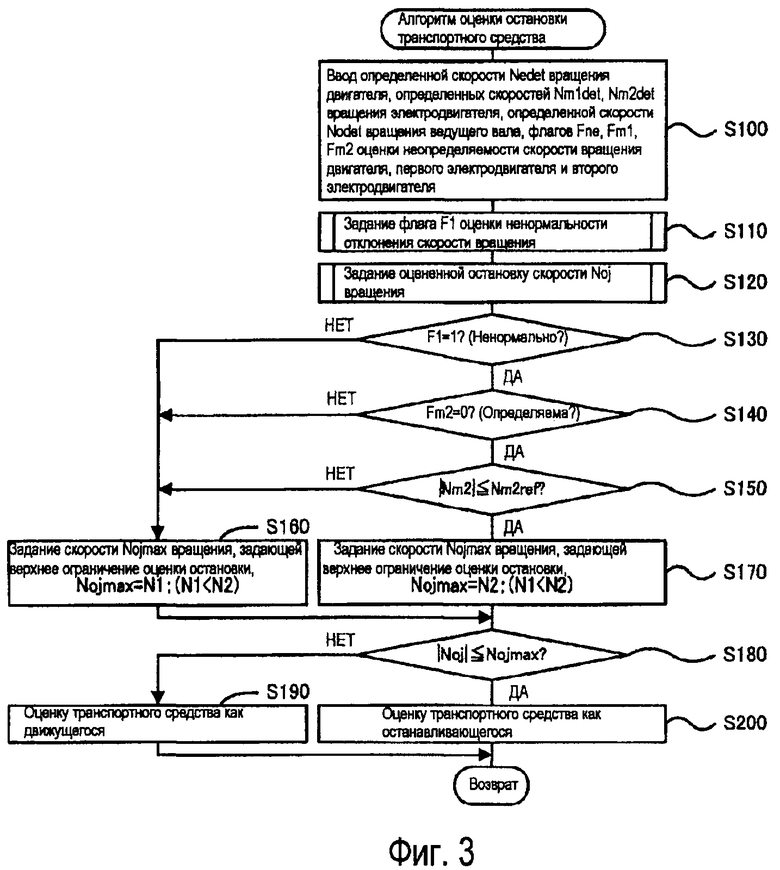
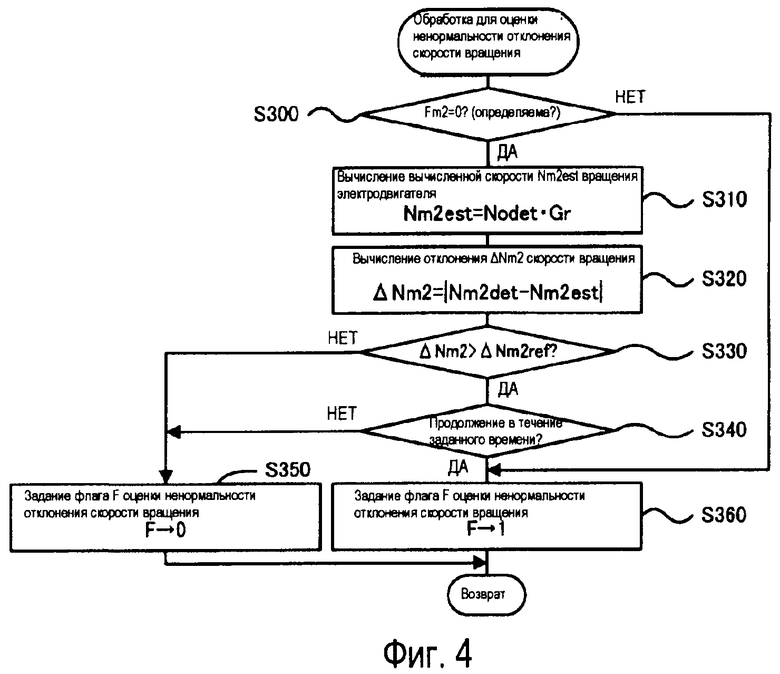
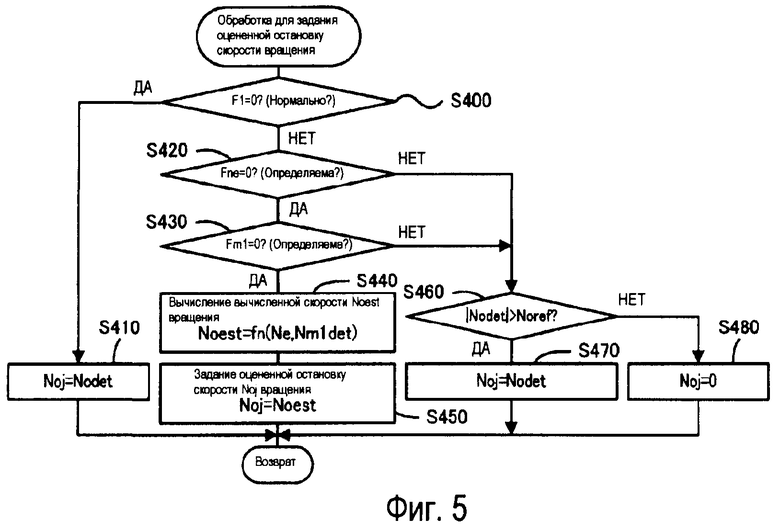
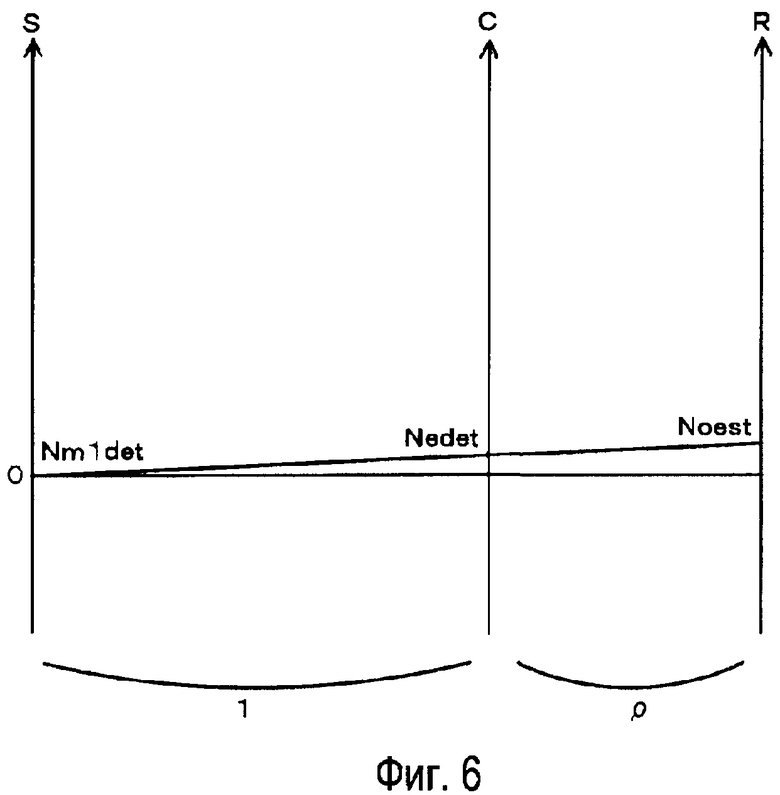
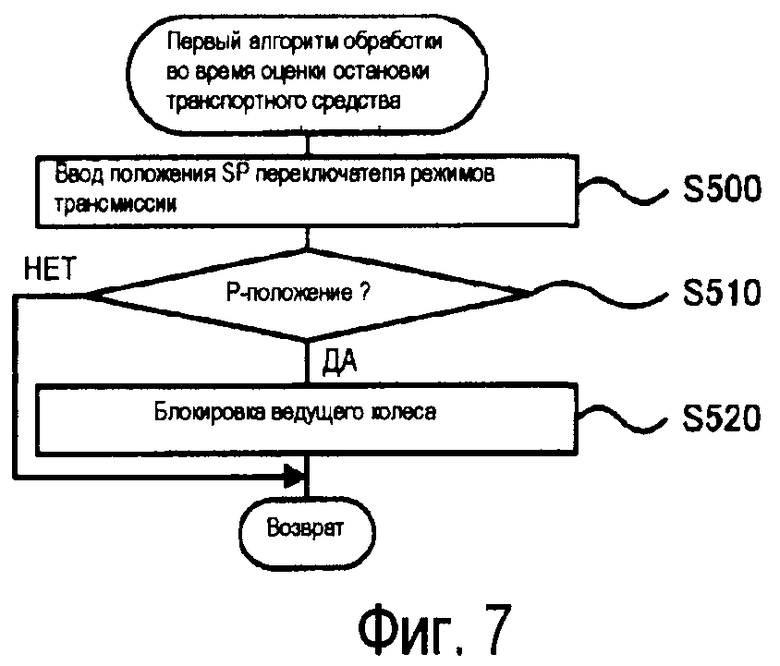
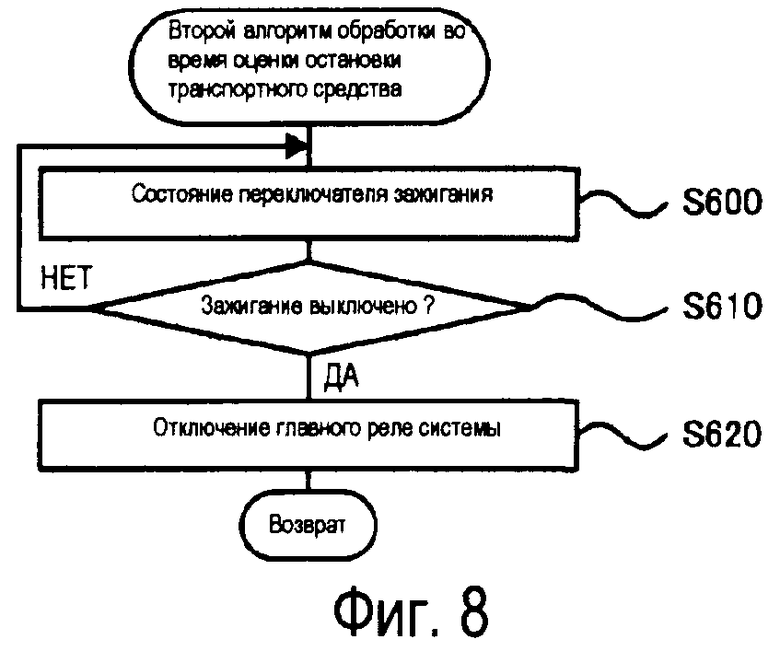
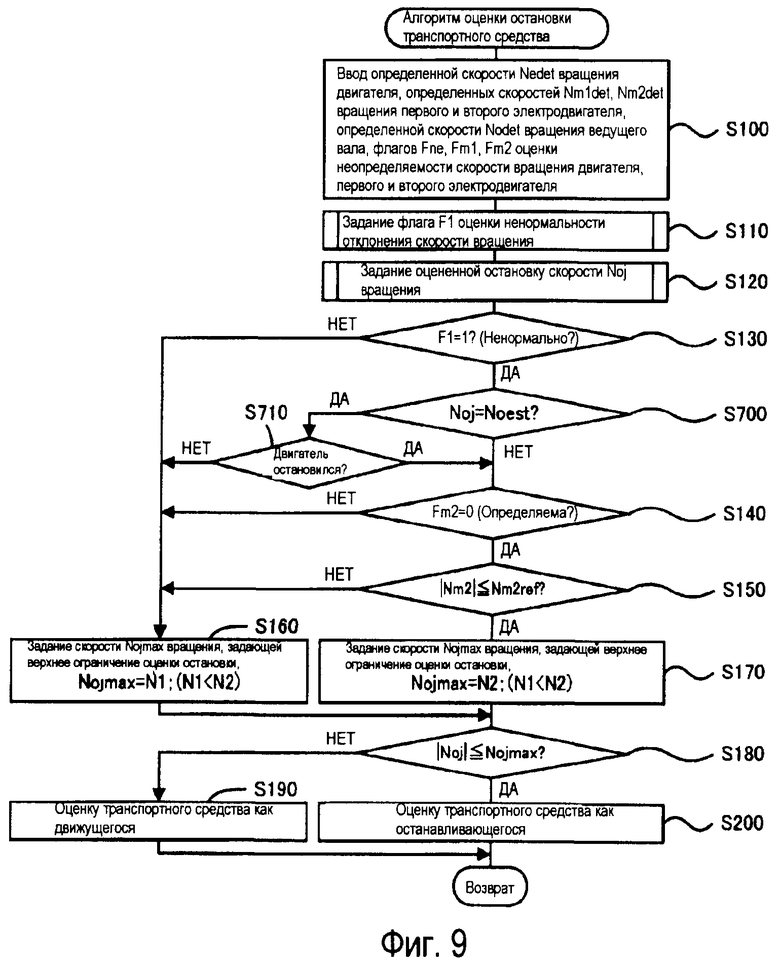
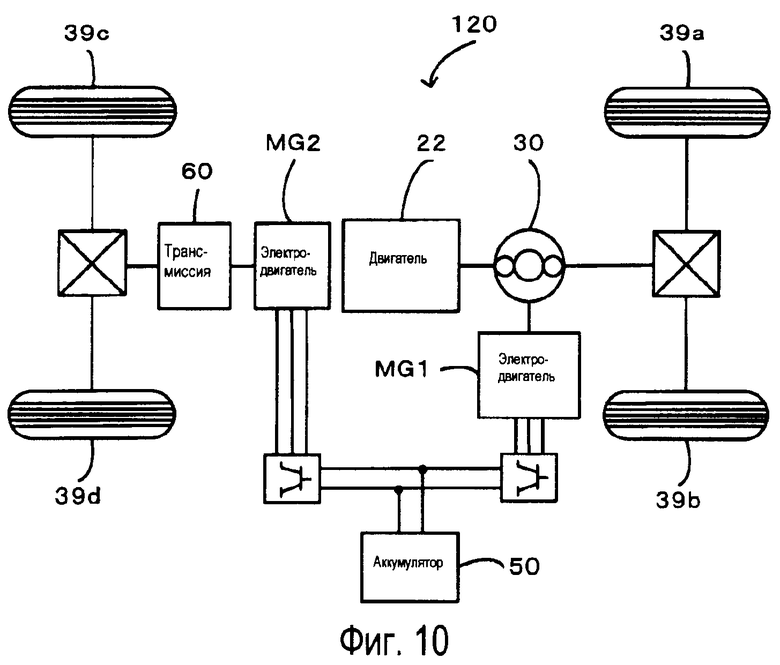
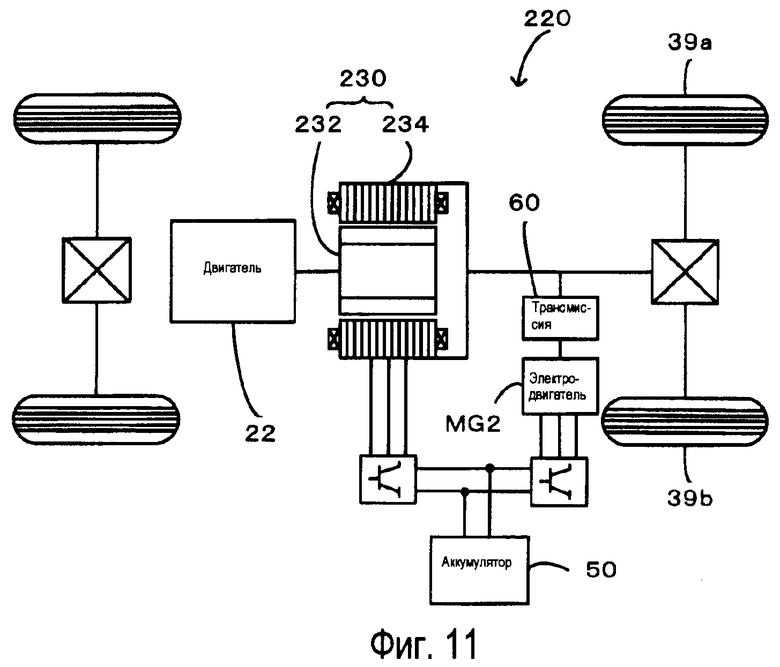
Изобретение относится к способу управления транспортным средством. Транспортное средство содержит электродвигатель, модуль передачи энергии, модуль определения или вычисления скорости вращения ведущего вала, модуль определения скорости вращения электродвигателя, модуль оценки скорости вращения, модуль оценки остановки транспортного средства. Способ управления заключается в том, что оценивают, являются или нет определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя нормальными, на основе определенной или вычисленной скорости вращения ведущего вала. Скорость вращения ведущего вала определяется или вычисляется модулем определения или вычисления скорости вращения ведущего вала. Скорость вращения электродвигателя определяется модулем определения скорости вращения электродвигателя. Определяют, являются ли нормальными/ненормальными скорость вращения ведущего вала и скорость вращения электродвигателя. Оценивают, остановилось или нет транспортное средство, на основе оцененной скорости вращения ведущего вала. Технический результат заключается в точной оценке факта остановки транспортного средства. 2 н. и 16 з.п. ф-лы, 11 ил.
1. Транспортное средство, содержащее электродвигатель, выполненный с возможностью потребления и выработки энергии, модуль передачи энергии, передающий энергию между электродвигателем и ведущим валом, соединенным с ведущим колесом, модуль определения или вычисления скорости вращения ведущего вала, определяющий или вычисляющий скорость вращения ведущего вала, модуль определения скорости вращения электродвигателя, определяющий скорость вращения электродвигателя, модуль оценки скорости вращения, оценивающий, являются или нет определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя нормальными, на основе определенной или вычисленной скорости вращения ведущего вала, которая является скоростью вращения ведущего вала, определенной или вычисленной модулем определения или вычисления скорости вращения ведущего вала, и определенной скорости вращения электродвигателя, которая является скоростью вращения электродвигателя, определенной модулем определения скорости вращения электродвигателя, модуль задания диапазона оценки остановки, устанавливающий первый заданный диапазон скорости вращения в качестве диапазона оценки остановки, когда определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя оценены как нормальные модулем оценки скорости вращения, и устанавливающий второй заданный диапазон скорости вращения с первым заданным диапазоном скорости вращения в качестве одной его части как диапазон оценки остановки, когда модулем оценки скорости вращения оценивается, что, по меньшей мере, одна из определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя не является нормальной, и модуль оценки остановки транспортного средства, оценивающий, остановилось или нет транспортное средство, на основе оценки скорости вращения ведущего вала, которая задается на основе определенной или вычисленной скорости вращения ведущего вала, определенной или вычисленной модулем определения или вычисления скорости вращения ведущего вала, или определенной скорости вращения электродвигателя, определенной модулем определения скорости вращения электродвигателя, и диапазона оценки остановки, заданного модулем задания диапазона оценки остановки.
2. Транспортное средство по п.1, в котором модуль задания диапазона оценки остановки является модулем, который задает диапазон первой заданной скорости вращения или меньший в качестве первого заданного диапазона скорости вращения и задает диапазон второй заданной скорости вращения или меньший, которая больше, чем первая заданная скорость вращения, в качестве второго заданного диапазона скорости вращения; и
модуль оценки остановки транспортного средства является модулем, который оценивает, остановилось или нет транспортное средство, на основе абсолютного значения оцененной скорости вращения ведущего вала и диапазона оценки остановки.
3. Транспортное средство по п.1, в котором модуль определения или вычисления скорости вращения ведущего вала является модулем, определяющим или вычисляющим скорость вращения на основе скорости вращения ведущего вала и воздействия магнитного поля, когда подвергается воздействию магнитного поля извне, модуль определения скорости вращения электродвигателя является модулем, определяющим скорость вращения электродвигателя независимо от воздействия магнитного поля, даже когда подвергается воздействию магнитного поля, и модуль задания диапазона оценки остановки является модулем, устанавливающим диапазон, включающий в себя определенную или вычисленную скорость вращения ведущего вала, когда подвергается воздействию магнитного поля, в качестве второго заданного диапазона скорости вращения.
4. Транспортное средство по п.1, в котором модуль задания диапазона оценки остановки является модулем, который задает второй заданный диапазон скорости вращения в качестве диапазона оценки остановки, когда определенная скорость вращения электродвигателя находится в третьем заданном диапазоне скорости вращения, и задает первый заданный диапазон скорости вращения в качестве диапазона оценки остановки, когда определенная скорость вращения электродвигателя находится вне третьего заданного диапазона скорости вращения, когда модулем оценки скорости вращения оценено, что, по меньшей мере, одна из определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя не является нормальной, и модуль оценки остановки транспортного средства является модулем, который оценивает, остановилось или нет транспортное средство, с помощью определенной или вычисленной скорости вращения ведущего вала в качестве оцененной скорости вращения ведущего вала.
5. Транспортное средство по п.4, в котором модуль задания диапазона оценки остановки задает диапазон скорости вращения электродвигателя, соответствующий первому заданному диапазону скорости вращения в скорости вращения ведущего вала в качестве третьего заданного диапазона скорости вращения.
6. Транспортное средство по п.1, в котором модуль оценки скорости вращения является модулем, который вычисляет скорость вращения электродвигателя на основе определенной или вычисленной скорости вращения ведущего вала и состояния модуля передачи энергии и оценивает, являются или нет определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя нормальными, на основе отклонения между вычисленной скоростью вращения электродвигателя, которая является вычисленной скоростью вращения электродвигателя, и определенной скоростью вращения электродвигателя.
7. Транспортное средство по п.6, в котором модуль оценки скорости вращения является модулем, который оценивает, что, по меньшей мере, одна из определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя не является нормальной, когда отклонение между вычисленной скоростью вращения электродвигателя и определенной скоростью вращения электродвигателя находится вне четвертого заданного диапазона скорости вращения в течение заданного времени.
8. Транспортное средство по п.1, в котором модуль оценки остановки транспортного средства является модулем, который оценивает, остановилось или нет транспортное средство, с помощью значения 0, заданного в качестве оцененной скорости вращения ведущего вала, когда определенная или вычисленная скорость вращения ведущего вала находится в пятом заданном диапазоне скорости вращения, и оценивает, остановилось или нет транспортное средство, с помощью определенной или вычисленной скорости вращения ведущего вала, заданной в качестве оцененной скорости вращения ведущего вала, когда определенная или вычисленная скорость вращения ведущего вала находится вне пятого заданного диапазона скорости вращения, когда модулем оценки скорости вращения оценено, что, по меньшей мере, одна из определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя не является нормальной.
9. Транспортное средство по п.8, в котором модуль оценки остановки транспортного средства является модулем, который задает диапазон, включающий в себя определенную или вычисленную скорость вращения ведущего вала, когда транспортное средство остановилось, в качестве пятого заданного диапазона скорости вращения.
10. Транспортное средство по п.1, дополнительно содержащее двигатель внутреннего сгорания, и модуль регулирования вращения, который соединен с выходным валом двигателя внутреннего сгорания и ведущим валом, независимо вращаемым относительно выходного вала, и регулирует скорость вращения выходного вала относительно ведущего вала с помощью потребления и выработки электрической энергии и потребления и выработки мощности к и от выходного вала и ведущего вала.
11. Транспортное средство по п.10, в котором модуль регулирования вращения является модулем, содержащим модуль потребления/выработки энергии трехвального типа, который соединен с тремя валами, представляющими собой выходной вал двигателя внутреннего сгорания, ведущий вал и третий вал, и подводит и отводит мощность к или от оставшегося вала на основе мощности, которая подается и отводится к и от любых двух валов из трех валов, и генератор, подающий и отводящий мощность к и от третьего вала.
12. Транспортное средство по п.11, в котором модуль определения или вычисления скорости вращения ведущего вала является модулем, содержащим модуль определения скорости вращения ведущего вала, который определяет скорость вращения ведущего вала, модуль определения скорости вращения двигателя, который определяет скорость вращения двигателя внутреннего сгорания, модуль определения скорости вращения генератора, который определяет скорость вращения генератора, и модуль вычисления скорости вращения ведущего вала, который вычисляет скорость вращения ведущего вала на основе определенной скорости вращения двигателя, которая является скоростью вращения двигателя внутреннего сгорания, определенной модулем определения скорости вращения двигателя, и определенной скорости вращения генератора, которая является скоростью вращения генератора, определенной модулем определения скорости вращения генератора, а модуль оценки остановки транспортного средства является модулем, который задает определенную скорость вращения ведущего вала, которая является скоростью вращения ведущего вала, определенной модулем определения скорости вращения ведущего вала, или вычисленную скорость вращения ведущего вала, которая является скоростью вращения ведущего вала, вычисленной модулем вычисления скорости вращения ведущего вала, в качестве определенной или вычисленной скорости вращения ведущего вала и оценивает, остановилось или нет транспортное средство, на основе оцененной скорости вращения ведущего вала, которая задается на основе определенной или вычисленной скорости вращения ведущего вала или определенной скорости вращения электродвигателя и диапазона оценки остановки, когда модулем оценки скорости вращения оценено, что, по меньшей мере, одна из определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя не является нормальной.
13. Транспортное средство по п.12, в котором модуль оценки остановки транспортного средства является модулем, который оценивает, остановилось или нет транспортное средство, с помощью значения 0, заданного в качестве оцененной скорости вращения ведущего вала, когда определенная или вычисленная скорость вращения ведущего вала находится в пятом заданном диапазоне скорости вращения, и оценивает, остановилось или нет транспортное средство, с помощью определенной или вычисленной скорости вращения ведущего вала, заданной в качестве оцененной скорости вращения ведущего вала, когда определенная или вычисленная скорость вращения ведущего вала находится вне пятого заданного диапазона скорости вращения, когда модулем оценки скорости вращения оценено, что, по меньшей мере, одна из определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя не является нормальной, и когда скорость вращения двигателя внутреннего сгорания не может быть определена модулем определения скорости вращения двигателя, или когда скорость вращения генератора не может быть определена модулем определения скорости вращения генератора.
14. Транспортное средство по п.13, в котором модуль оценки остановки транспортного средства является модулем, который задает диапазон, включающий в себя определенную или вычисленную скорость вращения ведущего вала, когда транспортное средство останавливается, в качестве пятого заданного диапазона скорости вращения.
15. Транспортное средство по п.1, дополнительно содержащее модуль блокировки, который блокирует ведущее колесо, и модуль управления парковкой, который управляет модулем блокировки так, что ведущее колесо блокируется модулем блокировки, когда созданы условия парковки, включающие в себя условие того, что транспортное средство оценено как остановившееся модулем оценки остановки транспортного средства, и условие того, что положение переключателя режимов трансмиссии управляется водителем так, чтобы переключиться в положение парковки.
16. Транспортное средство по п.1, дополнительно содержащее аккумулятор, накапливающий и выдающий электричество, модуль соединения и отключения, который соединяет аккумулятор с системой электрического привода, включающей в себя, по меньшей мере, электродвигатель, или отключает аккумулятор от нее, и модуль управления отключением, который управляет модулем соединения и отключения так, что электродвигатель и аккумулятор отключаются модулем соединения и отключения, когда созданы условия отключения, включающие в себя условие того, что транспортное средство оценено как остановившееся модулем оценки остановки транспортного средства, и условие того, что зажигание выключено водителем.
17. Транспортное средство по п.1, в котором модуль передачи энергии является модулем трансмиссии, который передает энергию между вращающимся валом электродвигателя и ведущим валом с изменением в передаточном отношении.
18. Способ управления транспортным средством, содержащим электродвигатель, выполненный с возможностью потребления и выработки энергии, модуль передачи энергии, передающий энергию между электродвигателем и ведущим валом, соединенным с ведущим колесом, модуль определения или вычисления скорости вращения ведущего вала, определяющий или вычисляющий скорость вращения ведущего вала, и модуль определения скорости вращения электродвигателя, определяющий скорость вращения электродвигателя, при этом согласно способу оценивают, являются или нет определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя нормальными, на основе определенной или вычисленной скорости вращения ведущего вала, которая является скоростью вращения ведущего вала, определенной или вычисленной модулем определения или вычисления скорости вращения ведущего вала, и определенной скорости вращения электродвигателя, которая является скоростью вращения электродвигателя, определенной модулем определения скорости вращения электродвигателя, и когда оценено, что определенная или вычисленная скорость вращения ведущего вала и определенная скорость вращения электродвигателя являются нормальными, оценивают, остановилось или нет транспортное средство, на основе оцененной скорости вращения ведущего вала, которая задается на основе определенной или вычисленной скорости вращения ведущего вала или определенной скорости вращения электродвигателя и первого заданного диапазона скорости вращения, и когда оценено, что, по меньшей мере, одна из определенной или вычисленной скорости вращения ведущего вала и определенной скорости вращения электродвигателя не является нормальной, оценивается, остановилось или нет транспортное средство, на основе оцененной скорости вращения ведущего вала, которая задается на основе определенной или вычисленной скорости вращения ведущего вала или определенной скорости вращения электродвигателя и второго заданного диапазона скорости вращения с первым заданным диапазоном скорости вращения в качестве его части.
| JP 2000324607 А, 24.11.2000 | |||
| JP 2000220512 A, 08.08.2000 | |||
| JP 8251708 A, 27.09.1996 | |||
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2101749C1 |

