Область техники, к которой относится изобретение
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано для регулирования движения поездов.
Уровень техники
Известен способ регулирования движения поездов с использованием тональных рельсовых цепей с централизованным размещением оборудования [Типовые материалы для проектирования 410306-ТМП. Автоблокировка с тональными рельсовыми цепями и централизованным размещением оборудования АБТЦ-03. ОАО «РЖД», Филиал института по проектированию сигнализации, централизации, связи и радио на железнодорожном транспорте «ГИПРОТРАНССИГНАЛСВЯЗЬ» 2004 г.]. Информация о состоянии путевых участков формируется с помощью рельсовых цепей и по линейным проводам передается на прилегающие к перегону станции. На подвижной состав информация о состоянии впередилежащих путевых участках передается с помощью напольных светофоров и системы АЛС.
Недостатками способа является: использование напольных и локомотивных светофоров; большое количество жил кабеля на перегоне; невысокая точность определения координаты хвоста впередиидущего поезда; стандартные требования для каждого из блок-участков по их длине с целью обеспечения снижения скорости или полной остановки поезда; использование нескольких несущих и модулирующих частот; а так же наличие путевых приборов; возложение на машиниста обязанности по определению оптимальной и предельно допустимой скорости движения, на основании опыта ведения поезда с учетом плана и профиля пути, параметров поезда и недостатков системы пневматических тормозов.
Известен способ регулирования скорости движения поездов, который воплощен в устройстве КЛУБ. Устройство предназначено для повышения безопасности в поездной и маневровой работе путем приема сигналов АЛС, - и отображения их у машиниста, измерения и отображения скорости движения, исключения несанкционированного трогания локомотива, контроля скорости движения, контроля торможения перед светофором с запрещающим сигналом, контроля бодрствования и бдительности машиниста, формирования сигналов для системы автоматического управления торможением (САУТ).
Локомотивный блок индикации отображает машинисту локомотива следующую информацию:
- сигналы светофоров (зеленый, желтый, красно-желтый, белый и белый мигающий, красный);
- количество свободных блок-участков - 5;
- скорость движения локомотива - трехразрядное десятичное число зеленого цвета;
- допустимая скорость проследования впередистоящего путевого светофора (контролируемая скорость) - трехразрядное десятичное число красного цвета;
- допустимая скорость движения в данной точке пути, индицируется вместо допустимой скорости проследования впередистоящего светофора (в тех же знакоместах) при движении к путевому светофору с красным огнем -трехразрядное десятичное число красного цвета;
- направление движения по стрелочному переводу (прямо либо с отклонением) - точечными индикаторами соответственно зеленого и желтого цвета;
- предварительная световая сигнализация контроля бодрствования или контроля бдительности машиниста - индикатором красного цвета.
Недостатками способа, где используются системы КЛУБ и АБ, является: использование напольных и локомотивных светофоров; большое количество жил кабеля на перегоне; невысокая точность определения координаты хвоста впередиидущего поезда; стандартные требования для каждого из блок-участков по их длине с целью обеспечения снижения скорости или полной остановки поезда; использование нескольких несущих и модулирующих частот; а так же наличие путевых приборов; возложение на машиниста обязанности по определению оптимальной и предельно допустимой скорости движения, основанном на опыте ведения поезда с учетом плана и профиля пути, параметров поезда и недостатков системы пневматических тормозов.
Данное техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом, на достижение которого направлено данное техническое решение, является расширение функциональных возможностей системы, повышение безопасности движения поездов, повышение надежности устройств автоматики и телемеханики, снижение затрат на строительство и эксплуатацию станционных и локомотивных устройств регулирования движения поездов, повышение пропускной способности, снижение затрат на электроэнергию на тягу поездов, повышение точности выполнения графика движения поездов, снижение износа подвижного состава и верхнего строения пути, регулирование скорости движения поезда без участия станционной ЭВМ, системы АЛСН, светофоров, радиостанций.
Технический результат достигается за счет способа регулирования движения поездов посредством сигналов, которые передают информацию о состоянии впередилежащих перегонных участков и станционных путей, в установленном маршруте, при этом на локомотивах устанавливают устройства приема информации с волновода о состоянии путевых участков каждой половины перегона, прилегающих к станции с обеих сторон и состоянии станционных участков пути и номерах путей приема и отправления, при этом эта информация принимается на участке подвески волновода, который начинается у границы перегона с предыдущей станцией и заканчивается в середине следующего перегона, циклически передают приказ телесигнализации на все локомотивы в зоне их связи с волноводом одинаковыми для всех локомотивов, что позволяет локомотивной ЭВМ совместно с приемником системы спутниковой навигации и информации, хранящейся в памяти локомотивной ЭВМ, о графике движения поезда, о параметрах поезда, о плане и профиле пути, а также о путевом развитии всего участка следования локомотива, осуществлять расчет оптимальной скорости движения для своего поезда, управлять локомотивным контроллером и краном машиниста для поддержания расчетной скорости и выдавать на локомотивный пульт-табло информацию для контроля машинистом за движением поезда, при этом в случае нештатной ситуации машинист самостоятельно управляет поездом.
Краткое описание чертежей
На Фиг. 1 представлены: путевой план, зоны контроля, управления и связи; на Фиг. 2 - фрагмент локомотивного пульта-табло, на Фиг. 3 - фрагмент приказа, передаваемого на локомотивы, на Фиг. 4 - структурные схемы устройств постов ЭЦ, на Фиг. 5 - структурная схема локомотивных устройств.
Осуществление изобретения
На Фиг. 1, 2, 3, 4 и 5 приведены следующие обозначения:
1 - план станции А;
1 - план станции Б;
3 - план станции В;
4 - план перегона АБ;
5 - план перегона БВ;
6 - зона контроля путевых участков прилегающих к ст. А;
7 - зона контроля путевых участков прилегающих к ст. Б;
8 - зона контроля путевых участков прилегающих к ст. В;
9 - зона управления стрелками ст. А;
10 - зона управления стрелками ст. Б;
11 - зона управления стрелками ст. В;
12 - зона вязи с локомотивом по волноводу ст. А;
13 - зона вязи с локомотивом по волноводу ст. Б;
14 - зона вязи с локомотивом по волноводу ст. В;
15 - зона вязи с локомотивом по волноводу ст. Г;
16 - шкала скорости;
17 - указатель номера поезда;
18 - указатель времени приема поезда на впередилежащую станцию;
19 - указатель времени отправления поезда с впередилежащей станции;
20 - указатель экстренного торможения;
21 - указатель фактической скорости движения поезда;
22 - указатель расчетной позиции локомотивного контроллера;
23 - указатель расчетной позиции крана машиниста;
24 - расчетная кривая скорости;
25 - указатель местонахождения поезда;
26 - границы путевых участков (рельсовых цепей);
27 - первый указатель места контроля бдительности;
28 - стрелка указателя установленного маршрута;
29 - второй указатель места контроля бдительности;
30 - указатель места начала торможения;
31 - указатель марки стрелочного перевода;
32 - путевое развитие;
33 - график указателя профиля пути;
34 - график указателя плана пути;
35 - сенсорная кнопка переключения на ручное управление;
36 - сенсорная кнопка переключения на автоматическое управление;
37 - клавиатура ввода параметров поезда, временного ограничения скорости и др. параметров;
38 - сенсорная кнопка контроля бдительности;
39 - первый цикл передачи информации на локомотив;
40 - второй цикл передачи информации на локомотив;
41 - начало третьего цикла передачи информации на локомотив;
42 - информация о состоянии путевых участков половины перегона со стороны нечетной горловины ст. Б;
43 - информация о номере пути приема;
44 - информация о состоянии путевых участков нечетной горловины;
45 - информация о состоянии приемоотправочного пути;
46 - информация о состоянии путевых участков четной горловины;
47 - информация о номере пути, с которого отправляется поезд;
48 - информация о состоянии путевых участков половины перегона со стороны нечетной горловины ст. Б;
49 - интервал между циклами передаваемого приказа;
50 - центральный пост диспетчерской централизации;
51 - устройства поста ЭЦ ст. Б;
52 - устройства поста ЭЦ ст. В;
53 - линия связи между постом диспетчерской централизации и постами ЭЦ;
54 - линейный пункт диспетчерской централизации ст. Б;
55 -система микропроцессорной централизации ст. Б;
56 - шифратор приказа телесигнализации передаваемого на локомотив со ст. Б;
57 - первый генератор для формирования приказов телесигнализации, передаваемых на локомотивы со ст. Б;
58 - второй генератор для формирования приказов телесигнализации передаваемых на локомотивы со ст.Б;
59 - коммутатор сигналов для формирования приказов телесигнализации, передаваемых на локомотивы со ст.Б;
60 - линия для отправки информации с пункта передачи информации на линейный пункт диспетчерской централизации ст. Б - 54;
61 - линия для обмена информацией между линейным пунктом диспетчерской централизации и системой МПЦ ст. Б;
62 - линия для передачи информации между системой МПЦ и шифратором ст. Б;
63 - линия для осуществления контроля за состоянием путевых участков половины перегона со стороны нечетной горловины ст. Б;
64 - линия для осуществления контроля за состоянием путевых участков половины перегона со стороны четной горловины ст. Б;
65 - линия для передачи информации между шифратором и коммутатором ст. Б;
66 - линия для передачи сигнала от первого генератора к коммутатору ст. Б;
67 -линия для передачи сигнала от второго генератора к коммутатору ст. Б;
68 - волновод ст. Б;
69 - пункт передачи информации с локомотива на линейный пункт диспетчерской централизации ст. Б;
70 - линейный пункт диспетчерской централизации ст. В;
71 -система микропроцессорной централизации ст. В;
72 - шифратор приказа передаваемого на локомотив со ст. В;
73 - первый генератор для формирования приказов, передаваемого на локомотивы со ст. В;
74 - второй генератор для формирования приказов, передаваемого на локомотивы со ст. В;
75 - коммутатор сигналов для формирования приказов, передаваемых на локомотивы со ст. В;
76 - линия для отправки информации с пункта передачи информации на линейный пункт диспетчерской централизации ст. В - 70;
77 - линия для обмена информацией между линейным пунктом диспетчерской централизации и системой МПЦ ст. В;
78 - линия для передачи информации между системой МПЦ и шифратором ст. В;
79 - линия для осуществления контроля за состоянием путевых участков половины перегона со стороны нечетной горловины ст. В;
80 - линия для осуществления контроля за состоянием путевых участков половины перегона со стороны четной горловины ст. В;
81 - линия для передачи информации между шифратором и коммутатором ст. В;
82 - линия для передачи сигнала от первого генератора к коммутатору ст. В;
83 - линия для передачи сигнала от второго генератора к коммутатору ст. В;
84 - волновод ст. В;
85 - пункт передачи информации с локомотива на линейный пункт диспетчерской централизации ст. В;
86 - локомотивный приемник системы спутниковой навигации;
87 - локомотивный фильтр;
88 - локомотивная ЭВМ (ЛЭВМ) со встроенными усилителями входных сигналов;
89 - устройство определения номера поезда УОНП;
90 - локомотивный пульт-табло;
91 - устройство управления локомотивным контроллером;
92 - устройство управления краном машиниста;
93 -линия для передачи информации с локомотивного приемника спутниковой системы навигации на локомотивную ЭВМ;
94, 95, 96 и 97 - линии для передачи информации с локомотивного фильтра на локомотивную ЭВМ;
98 - линия для передачи информацией с локомотивной ЭВМ на устройство определения номера поезда УОНП для информирования машиниста;
99 - линия для обмена информацией между локомотивной ЭВМ и локомотивным пультом-табло;
100 - линия для обмена и информации между локомотивной ЭВМ и устройством управления локомотивным контроллером;
101 - линия для обмена и информации между локомотивной ЭВМ и устройством управления краном машиниста;
102 - антенна приемника системы спутниковой навигации;
102 - антенна для связи с волноводом.
Описание работы системы, раскрывающее действие способа регулирования движения поезда.
Система содержит устройства и приборы, размещенные на перегонах, постах ЭЦ и локомотивах. На перегонах предусмотрены короткие рельсовые цепи (на Фиг. 1, 2, 3, 4 и 5 приборы рельсовых цепей не представлены), Длиной 400-600 м. Состояние рельсовых цепей половины перегона, прилегающего к станции (зона контроля состояний путевых участков), контролируются посредством одного путевого генератора и одного путевого приемника установленных на посту ЭЦ. Путевые трансформаторы размещены на перегоне у рельсовых линий и соединены с постом ЭЦ малопроводной линией связи (4-6 проводов). Сигналы с приемных концов рельсовых цепей передаются на пост ЭЦ поочередно (временное разделение сигналов).
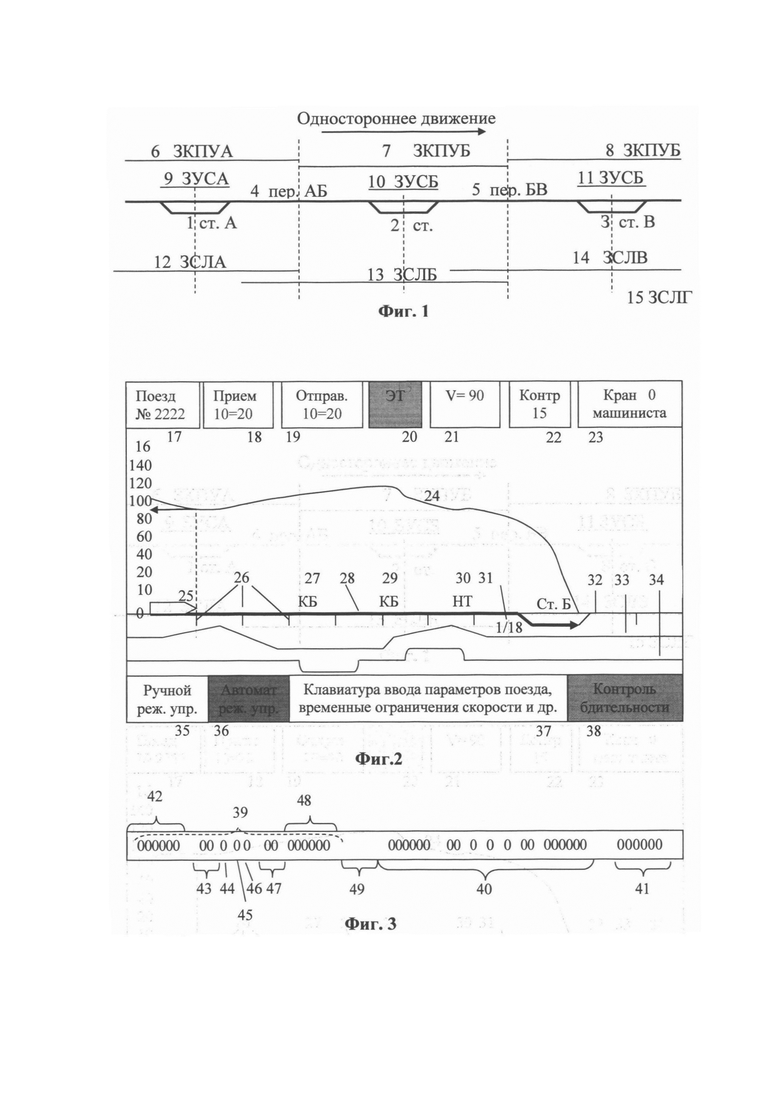
На Фиг. 1 изображены: путевой план, зоны контроля, управления и связи. На путевом плане представлены ст. А - 1, Б - 2 и В - 3, перегоны АБ - 4 и БВ - 5, зоны контроля путевых участков у ст. А - 6, ст. Б - 7, ст. В - 8; зоны управления стрелками на ст. А - 9, ст. Б - 10, ст. В - 11; зоны связи с локомотивами посредством волновода со ст. А - 12, ст. Б - 13, ст. В - 14, ст. Г (на Фиг. 1 не представлена) - 15. Волноводы от каждой станции обеспечивают передачу информации на локомотивы на участке от границы смежной станции (против хода движения поезда) до середины перегона за станцией (по ходу движения поезда). Информация в зоне действия волноводов (рядом с волноводом) передается на все локомотивы, находящиеся в зоне связи. Это позволяет исключить трансляцию информации о номере локомотива, по аналогии с системой АЛСН. На локомотивы передается информация о состоянии путевых участков, находящихся между средними точками перегонов, в т.ч. и станционных путей, номере путей приема и отправления со станции. Это позволит определить скорость движения локомотива по станции с учетом крутизны стрелок, участвующих в маршруте, основываясь на путевом развитии станций, информация о которой хранится в памяти локомотивной ЭВМ. Там же в ней хранится информация о плане и профиле пути, параметрах поезда, графике движения поезда. Перечисленные параметры позволяют локомотивной ЭВМ 88 (Фиг. 5) рассчитать скорость движения поезда в каждой точке пути и вывести на локомотивный пульт-табло 90 (фиг. 2) кривую скорости 24.
Пульт-табло представлен на Фиг. 2. На нем отображена информация о скорости - шкала скорости - 16, номере поезда - 17, времени приема на станцию - 18, времени отправления со станции - 19, информацию о включение экстренного торможения - 20, фактической скорости поезда - 21, позиции локомотивного контроллера - 22, позиции крана машиниста - 23, кривой скорости - 24, обозначении локомотива - 25, границы рельсовых цепей (путевых участков) - 26, точке пути, где необходимо подтвердить бдительность - 27, свободном и замкнутом (на станции) участке пути перед поездом (установлен маршрут), второй точке пути, где необходимо подтвердить бдительность - 29, точке начала торможения - 30, крутизне крестовины стрелочного перевода -31, путевом развитии - 32, профиле пути - 33, плане пути - 34, ручном режиме ведения поезда, автоматическом режиме ведения поезда 36, клавиатуре ввода параметров поезда 37, временном ограничении скорости и др., кнопке для подтверждения бдительности машиниста 38.
При автоматическом режиме управления движением поезда машинист посредством пульта-табло контролирует соответствие программной (кривая скорости) и фактической скорости, отслеживает информацию о других параметрах следования поезда. При ручном режиме управления машинист самостоятельно регулирует скорость движения поезда в соответствии с графиком движения, параметрами пути (пункты 31, 33 и 34), путевым развитием участка (пункт 32 на Фиг. 2), параметрами поезда, координатой местонахождения локомотива (пункт 25), а также с учетом количества свободных блок-участков (границы рельсовых цепей обозначены пунктом 26).
При автоматическом режиме локомотивная ЭВМ - 88 (Фиг. 5) вычисляет программную скорость (пункт 24 на Фиг. 2) с учетом вышеперечисленных параметров и посредством устройств управления локомотивным контроллером 91 (фиг. 5) и краном машиниста 92 и поддерживает ее на всем пути следования.
На Фиг. 3 изображено несколько циклов приказа телесигнализации: первый цикл - 39, второй - 40, третий - 41. Между циклами предусматривается интервал - 49, который позволяет осуществить синхронизацию сигналов при сбое. В каждом приказе передается информация о состоянии путевых участков до середины перегона перед станцией - 42 и за ней - 48.
С постов ЭЦ всех станций участка (Б - 2, В - 3) по волноводам 68 и 84 (Фиг. 4), соответственно, передается информация на локомотивы, находящиеся в зоне связи. На все локомотивы (в т.ч. и на локомотив 25 на Фиг. 2) поступает одинаковая информация о состоянии путевых станционных и перегонных участках и о положение стрелок. На перегоне локомотив получает информацию от постов ЭЦ станции отправления и приема, или только с поста ЭЦ станции приема. На станции на локомотив поступает информация с поста ЭЦ этой станции. Это позволяет иметь на локомотивах полную информацию о состоянии путевых участков перегонов и станционных путей, положении стрелок, необходимую для ведения поезда. Каждая станция формирует приказы с использованием двух частот. Нечетные станции (нечетность или четность станции определяется порядковыми номерами 1, 2, 3, …) передают частоты f1 и f2, четные - частоты f3 и f4 метрового диапазона.
Принимаемая информация со станции приема и отправления позволяет контролировать на локомотиве все перегонные участки. Состояние путевых участков нечетной и четной горловин осуществляется за счет импульсов 44 и 46, а приемоотправочного пути - 45 (Фиг. 3). Положение стрелок контролируется в горловинах путем передачи приказов телесигнализации о номере пути приема и пути отправления (импульсы - 43 и 47). С учетом информации, хранящейся в памяти локомотивной ЭВМ о путевом развитии станций, ЭВМ определяет скорость движения локомотивов с учетом крутизны стрелочных переводов и протяженность маршрутов.
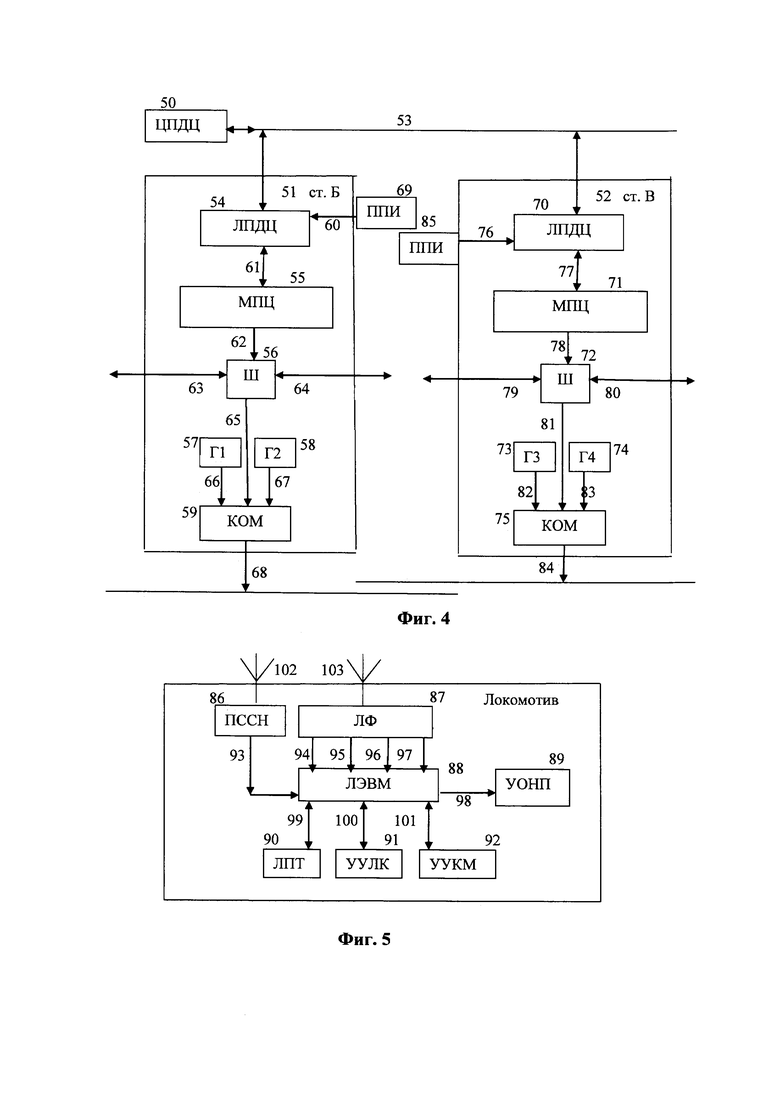
На Фиг. 4 представлены структурные схемы включения приборов постов ЭЦ ст. Б - 51 и ст. В - 52. К линейным пунктам диспетчерской централизации - пункты - 54 и 70 посредством проводной линии - 53 подключен центральный пост диспетчерской централизации - 50. К этим же пунктам 54 и 70 подключены соответственно пункты передачи информации 69 и 85 посредством линий 60 и 76. Односторонние стрелки на Фиг. 4 и 5 соответствуют линиям передачи информации, двухсторонние - линиям обмена информации. Пункты передачи информации размещаются на границе станции со стороны входной горловины. Они позволяют передать на линейные пункты диспетчерской централизации 54 и 70, а затем и на центральный пункт диспетчерской централизации 50, номер принимаемого поезда. Это может потребоваться при сбое системы регулирования движения поездов.
Представленные устройства предназначены для однопутного участка с односторонним движением. Линейный пункт диспетчерской централизации 54 поста ЭЦ ст. Б 51 обменивается информацией с устройствами системы микропроцессорной централизации 55 по линии 61. Система микропроцессорной централизации 55 воздействуют на шифратор 56 по линии 62. Шифратор 56 получает информацию о состоянии станционных путевых участков и положении стрелок, замкнутых в маршрутах приема и отправления, по линии 62, кроме того, шифратор 56 получает информацию о состоянии прилегающих к станции перегонов, а именно, о состоянии путевых участков расположенных между станцией и серединой перегонов по линиям 63 и 64, формирует приказ телесигнализации об их состоянии и сигнал цикловой синхронизации (интервал между приказами) для работы устройств циклического опроса (Фиг. 3). Этот приказ телесигнализации формируется с участием линии 65 (фиг. 4) между шифратором 56 и коммутатором 59, который по сигналам шифратора подключает к волноводу 68 первый генератор Г1 - 57 по линии 66, или второй генератор - 58 по линии - 67. Кроме того, благодаря перечисленным приборам и связям формируются короткие интервалы между импульсами и длинные - между циклами (Фиг. 3). Работа элементов 70 - 85 ст. В - 52 аналогична работе элементов 54-69 ст. В - 51.
Приказы телесигнализации принимаются на локомотиве (Фиг. 5) антенной 103 связи с волноводов 68 и 84 (Фиг. 4). Эта антенна соединена с входом локомотивного фильтра 87, выходы которого по линиям 94, 95, 96 и 97 соединены с входами локомотивной ЭВМ 88 и передают информацию при получении частот f1, f2, f3 и f4 соответственно. Кроме того, на еще один вход по линии 93 поступает информация о месте нахождения локомотива с приемника системы спутниковой навигации 86, на который поступают сигналы с антенны 102. ЭВМ получает информацию о состоянии участков перегонов и путей станций и номера маршрутов приема и отправления. Локомотивная ЭВМ по линиям 99, 100 и 101 обменивается информацией с локомотивным пультом табло (с сенсорными кнопками) 90, устройствами управления и контроля за состоянием устройства управления локомотивным контроллером 91 и устройства управления краном машиниста 92.
Основными преимуществами способа является то, что нет необходимости в использовании рельсовых цепей для работы системы АЛСН, светофоров и радиостанций при регулировании движения поездов, а также нет адресной части в приказе телесигнализации, как и в системе АЛСН. Приказы телесигнализации с постов ЭЦ передаются посредством волноводов на локомотивы, которые находятся в зоне связи. Локомотивная ЭВМ преобразует принимаемые сигналы для удобного восприятия машинистом и передает их на локомотивный пульт-табло.
Локомотивная ЭВМ рассчитывает скорость движения поезда на перегоне с учетом координаты нахождения поезда, координаты препятствия (граница станции или приемоотправочного пути, когда не установлен маршрут, присутствует подвижной состав) и времени прибытия на станцию по графику. Скорость движения по станции локомотивная ЭВМ рассчитывает с учетом крутизны стрелочных переводов в маршруте, наличия подвижных сердечников, протяженности маршрутов приема и отправления. Регулирование скорости поезда осуществляется автоматически, посредством локомотивной ЭВМ и устройств управления локомотивным контроллером и краном машиниста.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПОМОЩЬЮ РАДИОСИГНАЛОВ | 2019 |
|
RU2714962C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2714966C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ | 2019 |
|
RU2723528C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2020 |
|
RU2732181C1 |
| КОМПЛЕКСНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2723570C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ С ПОМОЩЬЮ ЭВМ БЕЗ ОПАСНЫХ ОТКАЗОВ | 2017 |
|
RU2673315C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА УЧАСТКАХ С ЭЛЕКТРИЧЕСКОЙ ТЯГОЙ | 2020 |
|
RU2738487C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2018 |
|
RU2694679C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2714965C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ПОЕЗДОВ | 2019 |
|
RU2732670C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики для регулирования движения поездов. В способе посредством сигналов передают на локомотивы поездов информацию о состоянии впередилежащих перегонных участков и станционных путей, в установленном маршруте, на локомотивах устанавливают устройства приема информации с волновода о состоянии путевых участков каждой половины перегона, прилегающих к станции с обеих сторон и состоянии станционных участков пути и номерах путей приема и отправления, при этом эта информация принимается на участке подвески волновода, который начинается у границы перегона с предыдущей станцией и заканчивается в середине следующего перегона, циклически передают приказ телесигнализации на все локомотивы в зоне их связи с волноводом одинаковыми для всех локомотивов. Локомотивная ЭВМ совместно с приемником системы спутниковой навигации и информации, хранящейся в памяти локомотивной ЭВМ, о графике движения поезда, о параметрах поезда, о плане и профиле пути, а также о путевом развитии всего участка следования локомотива, осуществляет расчет оптимальной скорости движения для своего поезда, управляет локомотивным контроллером и краном машиниста для поддержания расчетной скорости и выдает на локомотивный пульт-табло информацию для контроля машинистом за движением поезда, при этом в случае нештатной ситуации машинист имеет возможность самостоятельно управлять поездом. Достигается повышение безопасности движения поездов. 5 ил.
Способ регулирования движения поездов посредством сигналов, которые передают информацию о состоянии впередилежащих перегонных участков и станционных путей, в установленном маршруте, отличающийся тем, что на локомотивах устанавливают устройства приема информации с волновода о состоянии путевых участков каждой половины перегона, прилегающих к станции с обеих сторон и состоянии станционных участков пути и номерах путей приема и отправления, при этом эта информация принимается на участке подвески волновода, который начинается у границы перегона с предыдущей станцией и заканчивается в середине следующего перегона, циклически передают приказ телесигнализации на все локомотивы в зоне их связи с волноводом одинаковыми для всех локомотивов, что позволяет локомотивной ЭВМ совместно с приемником системы спутниковой навигации и информации, хранящейся в памяти локомотивной ЭВМ, о графике движения поезда, о параметрах поезда, о плане и профиле пути, а также о путевом развитии всего участка следования локомотива, осуществлять расчет оптимальной скорости движения для своего поезда, управлять локомотивным контроллером и краном машиниста для поддержания расчетной скорости и выдавать на локомотивный пульт-табло информацию для контроля машинистом за движением поезда, при этом в случае нештатной ситуации машинист самостоятельно управляет поездом.
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНЫХ СОСТАВОВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ ПО ТРАССЕ И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНЫХ СОСТАВОВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ ПО ТРАССЕ С ИСПОЛЬЗОВАНИЕМ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ | 2003 |
|
RU2228278C1 |
| И.Е | |||
| Насос | 1917 |
|
SU13A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Сепаратор-центрофуга с периодическим выпуском продуктов | 1922 |
|
SU128A1 |
| КОЛОВРАТНЫЙ ЖИДКОСТНЫЙ НАСОС | 1949 |
|
SU85434A1 |
| N | |||
| Nakamura; H | |||
| Tsunomachi; R | |||
| Fukui "Система связи дорожного транспортного средства для управления транспортным средством с использованием протекающего | |||

