Изобретение относится к области авиационной техники, а именно, к системам несущих винтов летательных аппаратов.
Известны системы соосных несущих винтов, служащие для создания подъемной силы и управления летательным аппаратом, реализованные на вертолетах Ка-26, Ка-32 и описанные в руководствах по технической эксплуатации данных вертолетов, изданных фирмой «Камов».
Наиболее близким, из известных конструкторских решений, является система соосных несущих винтов вертолета Ка-32, содержащая редуктор, с двумя соосными валами, вращающимися в противоположных направлениях, на которых закреплены втулки несущих винтов. Также система соосных несущих винтов вертолета Ка-32 содержит цепи управления каждым из несущих винтов, включающие два автомата перекоса, две ползушки, механизм общего и дифференциального шага, качалки и тяги, связывающие эти агрегаты.
Автомат перекоса нижнего несущего винта установлен неподвижно на верхней части редуктора, он кинематически связан с ручкой управления циклическим шагом лопастей несущих винтов наклоняющей автомат перекоса. Автомат перекоса верхнего несущего винта установлен на валу редуктора между несущими винтами и связан с нижним автоматом перекоса вращающимися вместе с нижним несущим винтом тягами, обеспечивающими параллельность наклонов верхнего и нижнего автоматов перекоса.
Ползушки, верхняя и нижняя, установлены на валу верхнего несущего винта, в пространстве между верхним и нижним несущими винтами. Ползушки связаны, через болты в прорезях вала, с тягами, пропущенными внутри вала, и через эти тяги связаны с установленным в нижней части редуктора рычажно-винтовым механизмом, управляющим общим и дифференциальным шагом несущих винтов.
Автомат перекоса нижнего несущего винта, через качалки нижней ползушки, связан тягами с осевыми шарнирами лопастей нижнего несущего винта.
Автомат перекоса верхнего несущего винта также связан тягами, через качалки верхней ползушки, с осевыми шарнирами лопастей верхнего несущего винта.
У прототипа, несущей системы вертолета Ка-32, так же, как и всех известных несущих систем вертолетов при полете с горизонтальной скоростью, на азимутах, где лопасть движется назад, в направлении обратном направлению полета, в комлевых сечениях лопасти образуется зона обратного обтекания. В зонах обратного обтекания, то есть там, где обтекание лопасти воздушным потоком происходит со стороны задней кромки лопасти, подъемная сила не образуется. Поэтому, для выравнивания подъемной силы по диску несущего винта, на этих азимутах углы атаки лопасти увеличиваются. Увеличение углов атаки вызывает увеличение профильного сопротивления лопасти, что приводит к непроизводительным затратам энергии на вращение несущих винтов. С ростом скорости полета вертолета зона обратного обтекания увеличивается, охватывая все большие относительные радиусы лопасти, вызывая необходимость все большего увеличения углов атаки отступающих лопастей, вплоть до критических значений, за которыми следует срыв потока и потеря несущих свойств лопасти, что ограничивает горизонтальную скорость полета вертолетов.
Аэродинамические ограничения, возникающие с ростом скорости полета вертолета при выполнении условия выравнивания подъемной силы по диску несущего винта, выражаются в возникновении срыва потока на лопастях с одной стороны и достижения области сверхзвукового обтекания воздуха с другой стороны, что является причиной относительно низких скоростей полета вертолета. Например, максимальная эксплуатационная скорость современного боевого вертолета КА-50-310 км/час.
Выравнивание подъемной силы по диску винта на известных соосных вертолетах, в том числе и на КА-32, обусловлено требованиями к динамической прочности вращающихся валов редуктора, на которых закреплены несущие винты, особенно это актуально для вращающегося вала верхнего несущего винта, втулка которого, для безопасности от схлестывания в полете лопастей верхнего и нижнего несущих винтов, вынесена вверх относительно втулки нижнего винта на величину 0,2R - радиуса винта. Выравнивание подъемной силы по диску несущего винта -обязательное условие для одновинтового вертолета, иначе он опрокинется на ту сторону, где меньше подъемная сила, на соосном же вертолете, у которого несущие винты вращаются в противоположных направлениях, выравнивание подъемной силы по диску несущего винта в аэродинамическом плане не обязательно. Соосный вертолет аэродинамически симметричен - потерю подъемной силы отступающих лопастей верхнего несущего винта возможно уравновесить подъемной силой наступающих лопастей нижнего несущего винта. Такое известное решение для скоростного соосного вертолета носит название - концепция наступающей лопасти - "ABC" (AdvancingBladeConcept).
У прототипа - системы двух соосных несущих винтов вертолета Ка-32, невозможно использовать концепцию "ABC" для скоростного вертолета, так как на режиме горизонтального полета подъемная сила на наступающей лопасти, неуравновешенная подъемной силой на отступающей лопасти, создаст изгибающий момент на вращающемся валу верхнего несущего винта - создаст изгибающий момент с переменным знаком с недопустимыми динамическими нагрузками. Кроме того, у прототипа - системы двух соосных несущих винтов вертолета Ка-32, верхний и нижний автоматы перекоса кинематически связаны между собой и представляют по сути один сдвоенный автомат перекоса управляющий и верхним, и нижним несущими винтами. Один автомат перекоса не позволяет одновременно дифференциально управлять углами атаки наступающих и отступающих лопастей на верхнем и на нижнем несущих винтах, при использовании концепции наступающей лопасти.
Целью предполагаемого изобретения является создание соосной несущей системы двух винтов с увеличенными пределами аэродинамических ограничений по максимальной скорости полета вертолета, без ухудшения аэродинамических качеств на висении и на вертикальных режимах полета, допускающей использование концепции наступающей лопасти
Указанная цель в предлагаемой системе двух соосных несущих винтов вертолета реализуется применением:
- двух соосных жестких несущих винтов, у которых лопасти имеют только осевой шарнир;
- двух несвязанных кинематически автоматов перекоса, для верхнего и для нижнего несущих винтов;
- дифференциального управления циклическим шагом каждого из несущих винтов, позволяющим уменьшать, с ростом скорости полета вертолета, углы атаки отступающих лопастей, уменьшая, тем самым, их вредное аэродинамическое сопротивление и отказываясь, таким образом, от выравнивания подъемной силы по дискам жестких соосных несущих винтов.
Кроме того, для увеличения усталостной прочности конструкции крепления втулки верхнего несущего винта, втулка установлена на подшипниках на неподвижной трубчатой стойке, вращение на втулку передается через зубчатые соединения рессорой от зубчатого колеса закрепленного на верхней части вала нижнего винта. Неподвижная (не вращающаяся) трубчатая стойка редуктора воспринимает нагрузку от изгибающего момента неуравновешенных подъемных сил верхнего несущего винта, как постоянную нагрузку. Такое конструктивное решение увеличивает усталостную прочность не вращающейся стойки, упрощает конструкцию управления верхним винтом.
У соосных жестких винтов отсутствуют встречные завалы конусов -отсутствует причина вызывающая схлестывание концов лопастей верхнего и нижнего несущих винтов, поэтому несущие винты можно сблизить, неподвижную трубчатую стойку верхнего винта можно сделать короче - систему более компактной и прочной.
Не вращающаяся трубчатая стойка редуктора позволяет на верхней части закрепить спассистему, видеокамеру и другую необходимую аппаратуру.
Техническое решение изобретения поясняется фигурой 1, где изображена система соосных несущих винтов вертолета.
Система соосных несущих винтов работает следующим образом. В редукторе 1, шестерня 2, получающая вращение от двигателя, передает вращение коническому зубчатому колесу 3. Зубчатое колесо 3, через связанный с ним вал нижнего несущего винта 4, передает вращение на втулку нижнего несущего винта 5 и на зубчатое колесо 6. Зубчатое колесо 6, через паразитную шестерню 7, передает вращение рессоре 8. Рессора 8 передает вращение зубчатому колесу 9 и связанной с ним втулке верхнего несущего винта 10. Втулка верхнего несущего винта 10, установленная на подшипниках на неподвижной стойке 11, закрепленной в редукторе 1, вращается в сторону противоположную вращению втулки нижнего несущего винта 5. Автомат перекоса нижнего несущего винта 12 установлен на верхнем фланце 13, редуктора 1 подвижно в осевом направлении. Автомат перекоса верхнего несущего винта 14, установлен сверху, на стойке 11 подвижно в осевом направлении. Наружные кольца автоматов-перекоса 15 и 16 связаны шлиц-шарнирами 17 и 18 с втулками несущих винтов 5 и 10 соответственно, и связаны тягами 19 и 20 с поводками осевых шарниров 21 и 22. Кольца управления автоматов перекоса 23 и 24 кинематически связаны с двумя трехплечими качалками 25 (условно показана одна - в цепи продольного управления, вторая трехплечая качалка, аналогичная - в цепи поперечного управления, не показана).
Кольцо управления 23 автомата перекоса нижнего несущего винта 12 связано с качалками 25 через две качалки 26, закрепленные на ползуне 27 автомата перекоса нижнего несущего винта 12 и две тяги 28 (условно показано, одна качалка 26 и одна тяга 28, в цепи поперечного управления, аналогичные качалка и тяга в цепи продольного управления не показаны).
Кольцо управления 24, автомата перекоса верхнего несущего винта 14, связано с качалками 25 через две качалки 29, четыре тяги 30, две качалки 31, две тяги 32, две качалки 33, закрепленные на ползуне 34 и две тяги 35 (условно показаны тяги и качалки в цепи поперечного управления, аналогичные тяги и качалки в цепи продольного управления не показаны).
Ручкой продольно-поперечного управления 36, через тяги 37 и 38 трехплечие качалки 25, наклоняя кольца управления 23 и 24 автоматов перекоса 12 и 14, осуществляется продольно-поперечное управление вертолетом (т.е. осуществляется управление циклическим шагом лопастей).
Ручкой общего шага 39, через тягу 40, механизм общего и дифференциального шага (МОДШ) 41, качалки 42 и 43, ползун 34, тяги 29, ползуны 27 и 28, обоих автоматов перекоса 12 и 14, перемещаются в одном направлении одновременно вверх или вниз, осуществляя через тяги 19, 20 и осевые шарниры 21, 22 управление общим шагом несущих винтов (вертолет взлетает или снижается).
Педалями путевого управления 44, действуя через тягу 45, качалку 46, тягу 47, перекашивается качалка 48, в результате рычаги 42 и 43 перемещают ползуны 27 и 28 автоматов перекоса 12, 14 в противоположных направлениях - один ползун вверх, другой вниз. Таким образом, на одном винте шаг увеличивается - увеличивается и подъемная сила, на другом винте шаг уменьшается - уменьшается подъемная сила. Суммарная подъемная сила не изменяется, но, в результате не скомпенсированных реактивных моментов у несущих винтов, вертолет разворачивается вправо или влево, т.е. осуществляется управление дифференциальным шагом.
С увеличением скорости горизонтального полета вертолета, летчик в ручную или автоматически, например, после достижения определенной скорости, через рулевую машинку 49, поворачивает на оси 50 качалку 51, перемещая параллельно самой себе качалку 25 в канале поперечного управления, осуществляя наклон навстречу друг другу, кинематически не связанных между собой верхнего и нижнего автоматов перекоса 12 и 14, таким образом, увеличивая углы атаки на лопасти несущего винта на азимуте, где они идут навстречу набегающему потоку воздуха и уменьшая углы атаки на азимуте отступающих лопастей, то есть, осуществляется дифференциальное управление циклическим шагом несущих винтов. Подъемная сила перераспределяется на наступающие лопасти верхнего и нижнего несущих винтов, при этом, отступающие лопасти становятся с нулевым углом атаки (становятся по потоку), не дают подъемной силы и уменьшают вредное сопротивление вращению винтов. Для уменьшения сопротивления, втулки несущих винтов 5, 10 и стойка 11, на которой устанавливается на подшипниках втулка верхнего несущего винта 10, закрываются обтекателями 52. На не вращающейся стойке 11, сверху, удобно разместить оборудование над соосными несущими винтами, например, установить видеокамеру 53 (или прицельное приспособление, или спассистему).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2709081C1 |
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2155702C1 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 2015 |
|
RU2613136C1 |
| СКОРОСТНОЙ СИНХРОКОПТЕР-АМФИБИЯ | 2016 |
|
RU2645515C2 |
| Автомат перекоса многороторного летательного аппарата с жестким креплением лопастей и способ его работы | 2020 |
|
RU2749709C1 |
| МНОГОЦЕЛЕВОЙ МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2016 |
|
RU2629483C1 |
| ВЕРТОЛЁТ | 2018 |
|
RU2742513C2 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2453472C1 |
| БЕЗАЭРОДРОМНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2018 |
|
RU2746025C2 |
| СКОРОСТНОЙ ВИНТОКРЫЛ-АМФИБИЯ | 2016 |
|
RU2627965C1 |

Изобретение относится к авиационной технике, в частности к конструкции несущей системы вертолета с соосными винтами. Система двух соосных несущих винтов вертолета содержит редуктор, два соосных несущих винта, вращающихся в противоположных направлениях, цепи управления каждым из несущих винтов, включающие два автомата перекоса и механизм управления общим и дифференциальным шагом несущих винтов. Лопасти двух жестких соосных несущих винтов управляются двумя не связанными между собой кинематически автоматами перекоса, таким образом, что с увеличением скорости горизонтального полета увеличиваются углы атаки на наступающих лопастях верхнего и нижнего несущих винтов, на которых создается необходимая подъемная сила и уменьшаются углы атаки на отступающих лопастях, где исключается создание подъемной силы. Обеспечивается уменьшение энергетических затрат на вращение несущих винтов на больших скоростях полета. 1 з.п. ф-лы, 1 ил.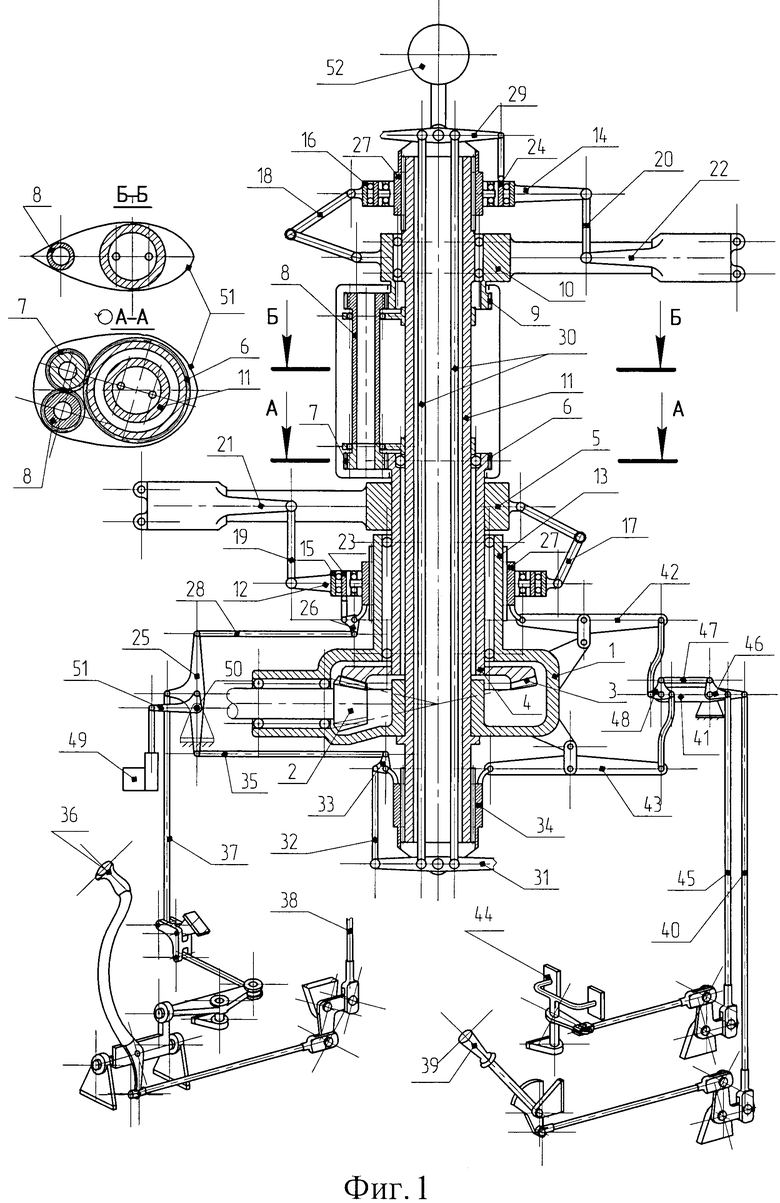
1. Система двух соосных несущих винтов вертолета, содержащая редуктор, два соосных несущих винта, вращающихся в противоположных направлениях, цепи управления каждым из несущих винтов, включающие два автомата перекоса и механизм управления общим и дифференциальным шагом несущих винтов, отличающаяся тем, что с целью увеличения допустимой по аэродинамическим ограничениям максимальной скорости полета соосного вертолета применены два жестких соосных несущих винта, лопасти которых управляются двумя не связанными между собой кинематически автоматами перекоса, таким образом, что с увеличением скорости горизонтального полета увеличиваются углы атаки на наступающих лопастях верхнего и нижнего несущих винтов, на которых создается необходимая подъемная сила и уменьшаются углы атаки на отступающих лопастях, где исключается создание подъемной силы, уменьшая за счет этого энергетические затраты на вращение несущих винтов, без ухудшения аэродинамических качеств на висении, вертикальных режимах и малых скоростях полета вертолета.
2. Система по п. 1, отличающаяся тем, что с целью получения постоянного по знаку изгибающего момента от неуравновешенных по диску верхнего несущего винта подъемных сил втулка верхнего несущего винта установлена на подшипниках на не вращающейся, неподвижной относительно вертолета трубчатой стойке редуктора, а крутящий момент на втулку верхнего несущего винта передается рессорой от вала нижнего винта через шестеренчатый привод.
| ПНЕВМАТИЧЕСКОЕ НОРМАЛЬНО ЗАМКНУТОЕ РЕЛЕ СИГНАЛИЗАЦИИ | 0 |
|
SU168554A1 |
| Способ производства кормовых антибиотиков и устройство для осуществления этого способа | 1959 |
|
SU127364A1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2453472C1 |
| WO 2016054139 A2, 07.04.2016 | |||
| US 8128034 B2, 06.03.2012. | |||

