Изобретение относится к вертолетостроению и касается принципиальной схемы одновинтового вертолета.
Вертолет является пока единственным видом безаэродромного летательного аппарата, применяемого на транспорте и в военном деле. В пилотируемых аппаратах широкое применение получили схемы: одновинтовая, соосная и схема со скрещенными винтами. Недостатками сосной схемы являются- сложность конструкции трансмиссии и втулки несущего винта (далее НВ), повышенное аэродинамическое сопротивление втулки НВ, опасность схлестывания лопастей, а также попадание индуктивной струи от верхнего винта на нижний. Схема со скрещенными винтами также характеризуется сложностью механизма втулки, а также ограничением числа лопастей.
Вышеуказанные недостатки заставляют во многих случаях отдавать предпочтение одновинтовой схеме, несмотря на то, что у нее также имеется по необходимости второй винт, называемый рулевым. Но рулевой винт имеет на порядок меньшую мощность по сравнению с НВ. В одновинтовой схеме мы имеем один большой винт и один маленький, что однозначно проще и дешевле, чем два больших НВ, которые мы имеем в других схемах вертолетов.
Классический одновинтовой вертолет содержит несущий винт с шарнирными лопастями и втулкой, снабженной механизмом изменения общего и циклического шага установки лопастей, а также содержит рулевой винт, установленный на хвостовой балке. Несущий винт соединен, посредством трансмиссии, с двигателем, неподвижно закрепленным на фюзеляже (см. например: ВОЛОДКО A.M. и др. «Вертолеты», М. Воениздат, 1992 г.).
Главным недостатком одновинтового вертолета является жесткое ограничение максимальной скорости полета, обусловленное снижением несущей способности отступающей лопасти и волновым кризисом обтекания наступающей лопасти, что образует «ножницы», в которых и зажата максимальная скорость полета, составляющая около 250 км/час. Причем и эта скорость достигается только за счет субзвуковой концевой окружной скорости лопастей. Такая концевая скорость лопастей обуславливает большие нагрузки в механизмах несущего винта, обуславливает повышенный шум винта и опасность его повреждений.
Цель изобретения состоит в снятии вышеуказанной связи между максимальной скоростью полета и концевой окружной скоростью вращения лопастей, что сделает возможным осуществлять полет со скоростью, соизмеримой с концевой окружной скоростью вращения лопастей. Практически это позволит, либо увеличить максимально возможную скорость полета, либо уменьшить концевую скорость вращения лопастей. В последнем случае снизится нагруженность механизмов, уменьшиться шум винта, вертолет станет более надежным и менее опасным аппаратом.
Предлагается вертолет, содержащий соединенный с двигателем несущий винт с машущими лопастями. Цель изобретения достигается тем, что втулка винта соединена с фюзеляжем посредством стержня с шарнирами на концах, а также посредством шести растяжек управляемой длины. Причем верхние концы указанных растяжек присоединены к не вращающемуся основанию втулки НВ в трех точках, расположенных по треугольнику, охватывающему шарнир крепления указанного стержня, а нижние концы растяжек, аналогичным образом, прикреплены к фюзеляжу. Указанное закрепление позволяет за счет согласованного управляемого изменения длины растяжек производить изменение положения втулки НВ относительно фюзеляжа по четырем степеням свободы, а именно - по боковому и продольному смещениям и боковому и продольному наклонам оси втулки НВ. При этом появляется возможность оперативной перестройки весовой центровки летательного аппарата и снятия нагрузки с отступающей лопасти НВ вплоть до нуля. Т. о полет может производиться практически на одной стороне винта, которая в крейсерском режиме будет располагаться над фюзеляжем. При этом отступающая лопасть, выполняющая при этом холостой обратный ход будет располагаться в стороне от фюзеляжа. Имея малую воздушную скорость, она не будет оказывать сильного сопротивления. При этом также, за счет управления углами наклона втулки НВ, появляется возможность управлять полетом вертолета как по курсу, так и в боковом направлении. Автомат перекоса перестает быть необходимым.
В частном варианте конструктивного выполнения предлагаемого вертолета лопасти НВ шарнирно закреплены на силовом кольце, выполняющем функцию приводного вала, а двигатель, например поршневой звездообразный, а также редуктор, установлены внутри указанного силового кольца. Такая компоновка становится возможной за счет устранения автомата перекоса. Это позволяет уменьшить аэродинамическое сопротивление вертолета.
В частном варианте выполнения предлагаемого вертолета предлагается применить два рулевых винта, с электроприводами и ограждающими кольцами, установленных в хвостовой и носовой частях фюзеляжа. При этом момент от двух винтов не сопровождается боковой силой и передается через указанную выше систему закрепления несущего винта, независимо от взаимного смещения рулевых винтов относительно НВ по высоте.
Изобретение поясняется нижеследующим описанием примеров конструктивного выполнения и двумя фигурами.
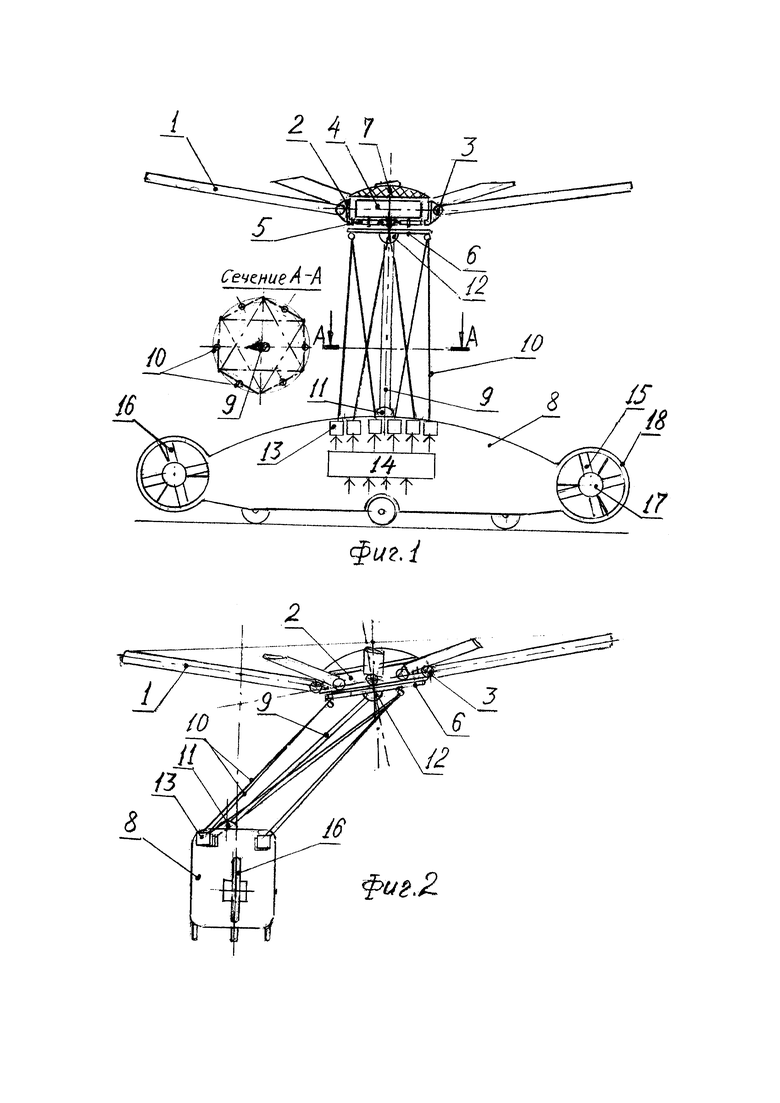
На фиг. 1 изображен общий вид предлагаемого вертолета. Вершины равносторонних штрихпунктирных треугольников на сечении А-А соответствуют проекциям точек прикрепления растяжек, проекция которых показана в виде шестиугольника.
На фиг. 2 показан вид сзади в конфигурации, соответствующей крейсерскому режиму полета.
Предлагаемый вертолет содержит несущий винт 1. Винт выполнен многолопастным (например восьмилопастным), что необходимо для уменьшения пульсаций средней подъемной силы несущего винта на больших скоростях полета.
Втулка несущего винта содержит силовое кольцо 2 большого диаметра, на котором закреплены т.н.з. «вертикальные» шарниры 3 крепления лопастей, обеспечивающие маховые движения лопастей. Двигатель 4 (в данном случае поршневой звездообразный) вместе с многопоточным редуктором 5 цилиндрического зацепления помещается внутри силового кольца 2, будучи закреплен на не вращающемся основании 6 втулки НВ, и, вместе с парашютом 7, закрыт дискообразным обтекателем.
В рассматриваемом варианте исполнения лопасти НВ имеют постоянный угол установки (угол атаки). Управление тягой осуществляется изменением числа оборотов двигателя 4. Отсутствует и автомат перекоса.
Основание 6 втулки НВ соединено с фюзеляжем 8 посредством стержня 9 и шести растяжек 10 управляемой длины. Стержень 9 имеет обтекаемый профиль поперечного сечения и соединен с фюзеляжем 8 посредством карданного шарнира 11, а с основанием 6 втулки НВ - посредством шарового шарнира 12. Растяжки 10 прикреплены к основанию 6 втулки НВ в трех точках, образующих треугольник (см. сечение А - А на фиг. 1), охватывающий шарнир 12 стержня 9. Аналогичным образом по треугольнику распределены места прикрепления нижних концов растяжек 10 к поверхности фюзеляжа 8. Причем растяжки 10 прикреплены к каждой точке парами так, что образуется непрерывное зигзагообразное кольцо. При этом управляемое изменение длины растяжек 10 обеспечивается за счет шести электролебедок 13, установленных в фюзеляже и соединенных независимыми каналами управления с блоком 14 автоматического управления. Вход блока 14 соединен с органами ручного управления, выполняющими функцию задатчиков, выдающих сигнал о требуемом двухкоординатном положении и двум углам наклона втулки НВ.
В носовой и хвостовой частях фюзеляжа 8 установлены рулевые винты 15 и 16, снабженные электроприводами 17 и ограждающими кольцами 18. Электропривод рулевых винтов позволяет сделать рулевые винты с постоянным шагом установки лопастей и осуществлять управление тягой за счет изменения частоты их вращения. В качестве источника электропитания применяется аккумулятор, подзаряжаемый генератором, установленным на двигателе 4. Указанным выполнением системы компенсации реактивного момента обеспечивается повышенная надежность ее функционирования - за счет упрощения конструкции рулевых винтов (постоянный шаг), дублирования их и устранения механической трансмиссии.
Функционирует вертолет предлагаемой схемы следующим образом. При вертикальном полете и висении втулка НВ располагается, как и обычно, симметрично над фюзеляжем. Управление вертолетом по крену и тангажу производится путем изменения наклона оси вращения НВ путем согласованного изменения длин растяжек 10 посредством блока управления 14, производящего пересчет положения органов ручного управления вертолета в соответствующие длины растяжек 10. Аналогичное (только без серводвигателей) управление применяется в автожирах, где также обычно отсутствует автомат перекоса. Управление общим шагом больше всего нужно для перевода в режим авторотации при аварийной посадке. Однако при современной тенденции к облегчению лопастей НВ не всегда удается осуществить подрыв винта для мягкой посадки, а большие удельные нагрузки на ометаемую площадь обуславливают высокую скорость снижения без двигателя. Так, что основным средством аварийного приземления остается парашют 7, рассчитанный на спасение всего аппарата. Его целесообразно дополнить тормозными двигателями твердого топлива для мягкой аварийной посадки.
По мере набора горизонтальной скорости полета маховые движения лопастей будут нарастать, поддерживая баланс весовой нагрузки между наступающей и отступающей лопастями. При этом возникающая разность скоростей обтекания компенсируется разностью углов атаки обтекания, возникающей из за появления вертикальной составляющей скорости движения лопастей, как это имеет место при машущем полете птиц. Однако уже при сравнительно небольшой скорости полета будет достигнут критический угол атаки, т.е. несущая способность НВ будет исчерпана. Дальнейшее увеличение скорости полета в вертолете обычной одновинтовой схемы приведет к срывам обтекания лопастей и тряске. В рассматриваемом же вертолете есть возможность неограниченно снижать нагрузку на отступающую лопасть, производя оперативную поперечную перебалансировку, т.е. поперечное смещение втулки НВ в положение изображенное на фиг.2. При этом практически вся нагрузка может быть передана на наступающую лопасть, а отступающая лопасть будет совершать обратный холостой ход при скорости обтекания, близкой к нулю. Последнее произойдет, когда скорость полета достигнет величины окружной скорости вращения лопастей. Если принять окружную скорость вращения НВ на радиусе 0,7 равной 500 км/час, что примерно соответствует началу проявление кризисных явлений на концевых сечениях, то получим скорость полета также 500 км/час. При этом допустимо даже несколько превысить скорость полета до 600 км/час и более. При этом отступающая лопасть войдет в режим обратного обтекания со скоростью около 100 км/час. Это допустимо с точки зрения относительных потерь. Таким образом, максимальная скорость полета предлагаемого вертолета без всяких натяжек и ухищрений составит до 600 км/час и более (т.е. как у транспортных самолетов). Возможность дальнейшего увеличения скорости полета определяется только экономической целесообразностью с точки зрения удельного расхода топлива.
Жесткое управляемое позиционирование втулки НВ, производимое с помощью растяжек 10 управляемой длины и стержня 9, в принципе ничем не отличается от способа позиционирования инструмента в станках с так называемой параллельной кинематикой. Отличие состоит только в том, что вместо шести работающих на сжатие стержней применены гибкие растяжки и введен один центральный стержень, берущий на себя все случаи сжатия. Принцип работы такой системы состоит в следующем. Три точки однозначно определяют положение твердого тела (в данном случае основания 6 втулки НВ). Каждая из указанных трех точек, за счет двух, связанных с ней растяжек, имеет свободу перемещения по линии, близкой к радиальному направлению. А поскольку все три точки связаны между собой в жесткий треугольник, то такое совместное их движение невозможно. Т. о. осуществляется жесткое закрепление втулки НВ. на фюзеляже с возможностью передавать и все моменты, включая изгибающий момент подвески веса фюзеляжа в положении, изображенном на фиг. 2, а также реактивный момент от редуктора привода винта, компенсируемый двумя рулевыми винтами 15 и 16.
Следует также заметить, что в данной системе связей имеется некоторая избыточность, создаваемая включением в кинематическую цепь стержня 9. В результате требуется некоторое согласование в управлении длиной растяжек 10. Это реализуется соответствующим алгоритмом работы блока управления 14.
Применение двух рулевых винтов с электроприводом обусловлено главным образом трудностями отведения трансмиссии на рулевой винт от установленного во втулке НВ двигателя. Однако это дает и множество сопутствующих указанных выше преимуществ: 1) устраняется опасность задевания НВ за балку, 2) уменьшается масса конструкции вертолета из за устранения балки, 3) уменьшается аэродинамическое сопротивление, 4) упрощается конструкция рулевых винтов из за возможности выполнения их с жестко установленными лопастями, 5) повышается надежность работы рулевых винтов из за устранения трансмиссии, упрощения их конструкции и дублирования.
И наконец, возможность разместить поршневой двигатель внутри втулки в настоящее время доказывается приведенными ниже параметрами разработанного демонстрационного образца сверхлегкого звездообразного двухтактного авиационного ДВС, выполненного в соответствии с изобретением по Патенту РФ №2645369 (приоритет от 10.02.2015 г.).
Рабочий объем - 900 см. куб.
Максимальная мощность - 61,5 квт при 6000 об/мин.
Масса конструкции - 12 кг.
Удельная масса конструкции - 0,195 кг/кВт.
Габаритные размеры -358*358*262 мм.
Расход бензина - 300 г/ кВт.час.
Расчетный моторесурс на макс, (взлетной) мощности - 30 часов.
Расчетный моторесурс на половинной (крейсерской) мощности - 240 часов.
Приведенные данные могут быть использованы для пересчета на другие мощности.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕЗАЭРОДРОМНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2018 |
|
RU2746025C2 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2018 |
|
RU2742496C2 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2021 |
|
RU2805888C2 |
| ДИСТАНЦИОННО УПРАВЛЯЕМОЕ БОЕВОЕ УСТРОЙСТВО | 2022 |
|
RU2826654C2 |
| ВИНТ, НАПРИМЕР НЕСУЩИЙ ВИНТ ВЕРТОЛЕТА | 2020 |
|
RU2740717C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2008 |
|
RU2430859C2 |
| ВЕРТОЛЁТ | 2013 |
|
RU2533374C1 |
| БЕСПИЛОТНЫЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2601470C1 |
| Одновинтовой скоростной вертолёт | 2022 |
|
RU2770945C1 |
| СКОРОСТНОЙ СИНХРОКОПТЕР-АМФИБИЯ | 2016 |
|
RU2645515C2 |
Изобретение относится к области авиации, в частности к конструкциям несущих систем вертолетов. Вертолет содержит соединенный с двигателем несущий винт (НВ), втулку винта, соединенную с фюзеляжем посредством стержня с шарнирами на концах и шести растяжек управляемой длины. Верхние концы указанных растяжек присоединены к невращающемуся основанию втулки НВ в трех точках, расположенных по треугольнику, охватывающему шарнир крепления указанного стержня. Нижние концы растяжек, аналогичным образом прикреплены к фюзеляжу. Лопасти НВ шарнирно закреплены на силовом кольце, выполняющем функцию приводного вала, а двигатель и редуктор установлены внутри указанного силового кольца. Вертолет содержит два рулевых винта, с электроприводами и ограждающими кольцами, установленные в хвостовой и носовой частях фюзеляжа. Обеспечивается возможность управления вертолетом, имеющим несущий винт с фиксированным шагом лопастей, повышение надежности и безопасности вертолета. 2 з.п. ф-лы, 2 ил.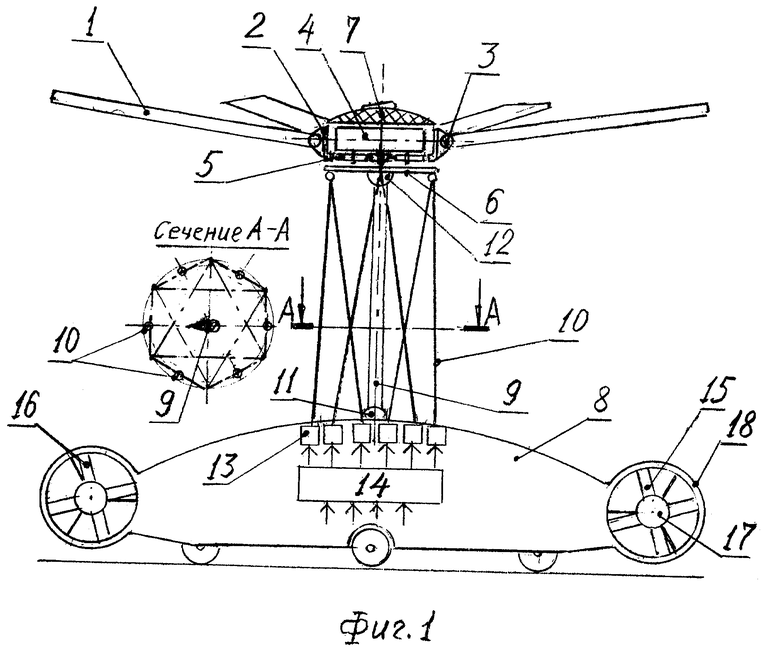
1. Вертолет, содержащий соединенный с двигателем несущий винт с машущими лопастями, отличающийся тем, что втулка винта соединена с фюзеляжем посредством стержня, с шарнирами на концах, а также посредством шести растяжек управляемой длины, причем верхние концы указанных растяжек присоединены к не вращающемуся основанию втулки НВ в трех точках, расположенных по треугольнику, охватывающему шарнир крепления указанного стержня, а нижние концы растяжек, аналогичным образом, прикреплены к фюзеляжу.
2. Вертолет по п. 1, отличающийся тем, что лопасти НВ шарнирно закреплены на силовом кольце, выполняющем функцию приводного вала, а двигатель и редуктор установлены внутри указанного силового кольца.
3. Вертолет по п. 1, отличающийся тем, что он содержит два рулевых винта, с электроприводами и ограждающими кольцами, установленных в хвостовой и носовой частях фюзеляжа.
| МАШИНА ДЛЯ ИЗГОТОВЛЕНИЯ КАНАТА | 1929 |
|
SU18176A1 |
| EP 3369653 A1, 05.09.2018 | |||
| КОЛОНКА ВЕРТОЛЕТА | 1999 |
|
RU2156208C1 |
| ВЕРТОЛЁТ | 2013 |
|
RU2533374C1 |
| US 20170217584 A1, 03.08.2017. | |||

