Изобретение касается разработки летательного аппарата нетрадиционной схемы и может быть применено в малой авиации в качестве альтернативы классическим вертолетам.
В качестве прототипа возьмем вертолет традиционной схемы, (см. например: ВОЛОДКО A.M. и др. Вертолеты, М. Воениздат 1992 г.), содержащий фюзеляж и несущий винт, соединенный с двигателем установленным в фюзеляже. Несущий винт содержит равномерно распределенные по окружности лопасти, расположенные преимущественно в горизонтальной плоскости - радиально, или по конусу. Лопасти несущего винта соединены с втулкой винта шарнирно с возможностью совершать маховые движения, посредством которых выравнивается подъемная сила между наступающей и отступающей лопастями. Кроме того, лопасти соединены с автоматом перекоса, посредством которого можно управлять углом установки лопасти по углу атаки, изменяя общий и циклический шаг винта. Вертолет содержит также, по крайней мере, еще один винт, необходимый для компенсации реактивного момента двигателя и для управления по курсу. Этот винт может присутствовать или в виде небольшого рулевого винта, или в виде второго несущего винта, расположенного соосно с первым, или отдельно.
Большим преимуществом вертолета перед другими видами транспорта является то, что он не требует аэродромов и дорог. Однако он обладает недостатками, которые не позволяют ему составить полноценную альтернативу самолету и автомобилю.
В техническом плане этими недостатками являются:
а) Необходимость иметь окружную скорость вращения несущего винта в два и более раз превышающую максимально возможную скорость полета, чтобы сохранить приемлемую несущую способность отступающей лопасти и избежать срыва обтекания на ней. Этим обусловлена высокая нагруженность лопастей и шарниров их крепления центробежными силами.
б) Принципиально высокая не стационарность работы лопастей несущего винта, обусловленная большим диапазоном и высокой частотой изменения скорости обтекания профиля, что создает критичность конструкции к резонансам по изгибным колебаниям лопасти.
в) Высокая критичность конструкции к флаттеру, что обусловлено консольностью закрепления лопасти по углу атаки при малой крутильной жесткости лопасти.
г) Необходимость иметь в составе вертолета более, чем один ротор. Иначе нечем будет компенсировать реактивный момент двигателя.
Следствием вышеуказанных технических недостатков вертолета традиционной схемы является следующие потребительские недостатки:
1. Ограниченный ресурс работоспособности лопастей, автомата перекоса и других деталей.
2. Высокая стоимость разработки и изготовления.
3. Высокие эксплуатационные затраты.
4. Повышенная опасность быстровращающегося винта, в том числе для людей на борту.
5. Повышенный шум несущего винта.
Целью изобретения является устранение вышеуказанных недостатков.
Предлагается безаэродромный летательный аппарат, содержащий фюзеляж и установленный на нем несущий ротор с лопастями, соединенными с механизмом циклического изменения угла атаки лопастей. Цель изобретения достигается тем, что несущий ротор выполнен в виде барабана, ось вращения которого направлена, преимущественно, вдоль направления полета летательного аппарата, а лопасти ориентированы своей длиной вдоль образующей цилиндрической боковой поверхности барабана.
При такой конфигурации векторы окружной скорости и скорости вращения лопастей и скорости полета летательного аппарата складываются под прямым углом. Обтекание лопасти получается со скосом потока, как у стреловидного крыла. До углов скоса 45 градусов несущая способность лопасти понижается незначительно, по сравнению с тем, как она понижается у отступающей лопасти вертолета из за уменьшения абсолютной величины скорости. Это позволяет снизить окружную скорость вращения лопасти, по крайней мере, до величины полетной скорости. Это уменьшает нагрузки от центробежных сил и уменьшает шум, создаваемый лопастями несущего винта. Кроме того, обтекание лопастей становится стационарным, а лопасти могут быть закреплены в нескольких точках, распределенных по всей длине лопасти. Этим устраняются проблемы, связанные с резонансными изгибными колебаниями, а, в сочетании с образующейся возможностью управлять углом установки лопастей с обоих концов лопасти, устраняется и проблема флаттера.
В частном варианте исполнения, механизм циклического изменения угла атаки лопастей выполнен в виде кривошипа, установленного на неподвижном относительно фюзеляжа основании с возможностью двух координатного изменения своего положения в плоскости вращения несущего барабана. При этом указанный кривошип, посредством обоймы установленной на указанном кривошипе на подшипнике, соединен со всеми лопастями посредством, тяг. Это позволит осуществлять управление не только величиной подъемной силы несущего барабана, но и ее направлением, относительно фюзеляжа, в плоскости вращения барабана.
Целесообразно установить два устройства циклического управления углом атаки лопастей, воздействующих на разные концы лопасти и действующие по независимым каналам управления. Это позволит оперативно управлять не только циклическим углом атаки лопасти, но и циклической круткой лопасти, используя эластичность лопасти к скручиванию. Это даст возможность управлять аэродинамическим моментом воздействия на летательный аппарат по углу тангажа и по углу курса, изменяя величину, знак и фазу циклического изменения крутки лопасти.
Если, в дополнение к этому, центр массы фюзеляжа сделать смещенным относительно оси несущего барабана, то будет обеспечена возможность создания момента, компенсирующего реактивный момент привода вращения барабана. В данном случае это момент по крену. Он создается за счет самопроизвольного поворота фюзеляжа относительно оси вращения барабана. Если при этом удерживать вертикальность вектора подъемной силы барабана, то возникает взаимное смещение вектора силы тяжести и вектора подъемной силы, т.е. возникает момент по крену, нарастающий до тех пор, пока не будет уравновешен реактивный момент привода. Таким образом имеется возможность управления по всем трем моментам - по тангажу, курсу и крену, что позволяет сделать летательный аппарат истинно однороторным. Это упрощает конструкцию летательного аппарата.
В частном варианте выполнения фюзеляж подвешен на подшипниках внутри несущего барабана. Это повышает компактность летательного аппарата, а также безопасность пассажиров в случае разрушения отдельных лопастей.
При этом обтекатель фюзеляжа, для уменьшения аэродинамического сопротивления может быть продлен за пределы полости несущего барабана. При этом, в частном варианте выполнения, расположенная снаружи хвостовая часть обтекателя стыкуется с расположенной внутри барабана частью посредством сечения круглой формы, сосной барабану, что позволяет сохранять обтекаемость при любых взаимных вращения обоих его частей.
В частном варианте выполнения предлагаемого летательного аппарата, он содержит шасси, выполненное в виде полых лыж, в полости которых закреплены, с малым выступанием, ролики. Это позволяет производить безопасную посадку с пробегом, как на твердую, так и на рыхлую площадку. Ролики при этом исключают боковое скольжение лыж и, в отличие от колес, создают малое аэродинамиское сопротивление.
Для обеспечения безопасной посадки при отказе двигателя может быть применен парашют, который может быть закреплен вне полости барабана в передней части оси. При этом обтекатель парашюта может заодно выполнить функцию обтекателя передней части втулки несущего ротора.
Для гашения скорости парашютирования может быть применен твердотопливный реактивный двигатель мягкой посадки (далее ТТРД), который может быть установлен внутри фюзеляжа с возможностью его выдвижения и оперативного автоматического управления его ориентацией по сигналам датчиков параметров движения аппарата относительно земли.
Изобретение поясняется нижеследующим детальным описанием примеров конструктивного выполнения и семью фигурами.
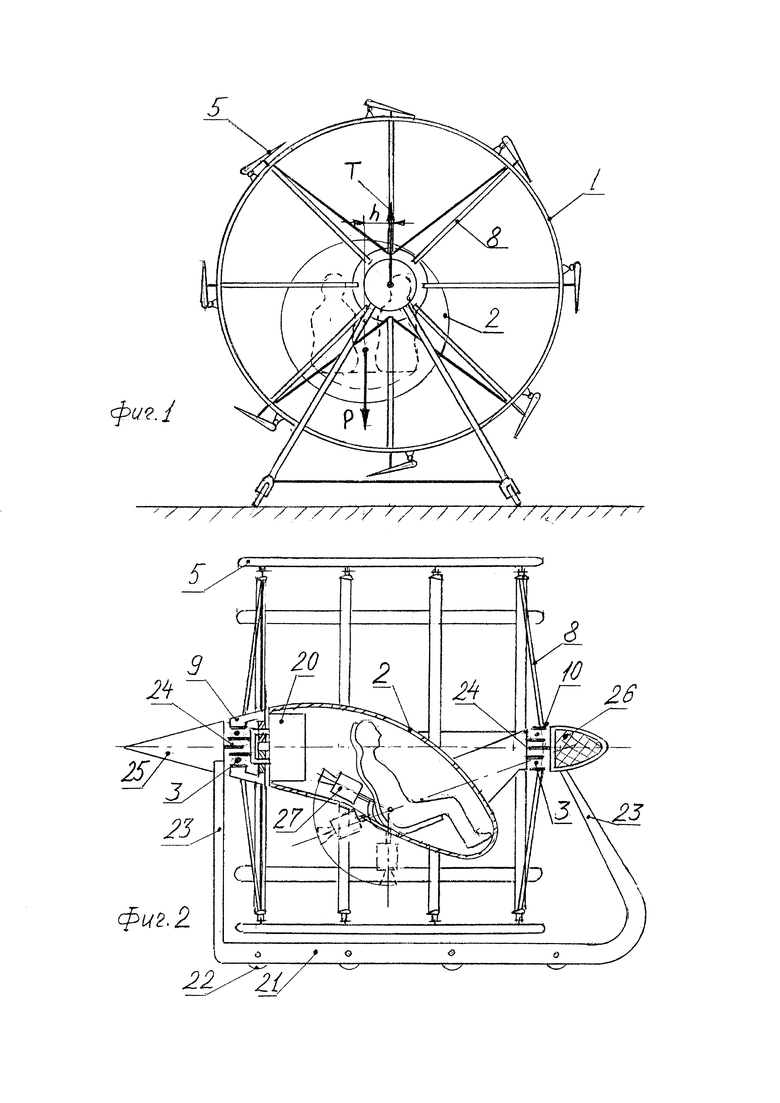
На фиг. 1 изображен предлагаемый летательный аппарат - вид сзади.
На фиг. 2 изображен предлагаемый летательный аппарат - вид справа.
На фиг. 3 изображена схема крепления лопасти к барабану.
На фиг. 4 изображена схема крепления лопасти к барабану в другой проекции.
На фиг. 5 изображена схема механизма циклического изменения угла атаки лопастей.
На фиг. 6 показана эпюра распределения вектора плотности подъемной силы лопасти по окружности барабана, а также эпюра плотности распределения вертикальной составляющей этого вектора по диаметру (размаху) барабана.
На фиг. 7 показана диаграмма векторного сложения окружной и полетной скоростей движения лопасти а плоскости «крыла».
Предлагаемый безаэродромный летательный аппарат, в предпочтительном варианте выполнения, содержит несущий ротор, выполненный в виде барабана 1, и фюзеляж 2, подвешенный в полости барабана на подшипниках 3. Ось вращения барабана 1 конструктивно ориентирована вдоль направления полета. На боковой цилиндрической поверхности барабана закреплены посредством шарниров 4 лопасти 5, равномерно распределенные по всей окружности барабана и ориентированные своей длиной вдоль образующих цилиндра. При этом лопасти расположены параллельно оси вращения барабана 1. Шарниры 4 крепления лопастей, располагаются на стойках 6, закрепленных на ободах 7, распределенных вдоль длины лопастей. Обода 7 выполнены жесткими на изгиб и имеют обтекаемый профиль сечения ориентированный по потоку воздуха, т.е. вдоль оси барабана. Стойки 6, наоборот, выполнены гибкими, например в виде жестяных пакетов. При столкновениях ротора с чем либо, лопасти 5 могут быть легко разрушены и отлетят, а стойки 6 отогнуться. При этом барабан сможет продолжить свое вращение или плавно затормозится, а обода 7 остануться недеформированными и не заденут за фюзеляж. Крайние из ободов 7 соединены посредством спиц 8 с втулками 9 и 10. Спицы 8 выполнены в виде трубок обтекаемого профиля с круткой, соответствующей крейсерской скорости полета.
Имеется два механизма 11 и 12 (фиг. 3) циклического управления углом атаки лопастей. Они расположены у соответствующих втулок 9 и 10. Каждый из них содержит кривошип 13 (фиг. 5), установленный на неподвижном относительно фюзеляжа основании 14 с возможностью двухкоординатного перемещения в плоскости вращения барабана 1. Например, кривошип 13 может быть соединен с основанием 14, посредством винтов 15 и 16, с отдельными сервоприводами, управляемыми по отдельным каналам. В частном случае, показанном на фиг. 5. сервоприводы выполнены в виде гаек, приводимых во вращение электродвигателями посредством червячной передачи. На кривошипе 13 установлена на подшипнике обойма 17, соединенная посредством гибких тяг 18 с соответствующими лопастями 5. Тяги 18 проложены в полости соответствующих спиц 8 и присоедины к лопастям со смещением относительно шарнира 4 (см фиг. 4). Причем сам шарнир 4 смещен относительно продольной оси инерции лопасти в другую сторону, нежели тяга 18. Этим обеспечивается натяжение тяг 18 центробежными силами от лопастей. Причем тяги 18, идущие от механизмов управления углом атаки 11 и 12, присоединены к разным участкам длины лопасти как можно ближе к соответствующим концам лопасти (см. фиг. 3), чем обеспечивается жесткий контроль крутки лопасти. Поэтому, в частности, передняя весовая противофлаттерная центровка лопасти здесь не обязательна. Однако она может быть введена, если переставить между собой места расположения шарникра 4 и присоенинения тяги 18.
Механизмы 11 и 12 управления углом атаки лопастей соединены с разными каналами системы управления 19, чем обеспечивается возможность циклического изменения не только угла атаки всех лопастей, но и циклического изменения крутки. В сочетании с тем, что каждый из механизмов 11 и 12, имеет векторное, т.е. двух координатное, управление, мы получаем систему управления лопастями по четырем степеням свободы. Т.е. то же, что имеется у обычных летательных аппаратов - у самолета и вертолета, а именно: курс, крен, тангаж и подъемная сила (или тяга).
На фигурах 1 и 2 изображен фюзеляж 2 в виде двухместной кабины. Центр массы его при полной нагрузке, смещен относительно оси барабана вниз. Под общим с кабиной обтекателем расположен двигатель 20, соединенный с втулкой 9 барабана 1 посредством обгонной муфты и редуктора.
Шасси выполено в виде лыж 21 с полостью, в которой расположены, с малым выступанием, ролики 22. Лыжи подвешены к барабану 1 посредством стоек 23 обтекаемого профиля и подшипников 24.
Задняя часть обтекателя фюзеляжа поднята до оси и имеет круглое, соосное ротору, сечение, по которому она стыкуется с задней частью 25 обтекателя, расположенной вне полости барабана и прикрепленной к стойкам 23 шасси.
В передней части оси барабана, вне его полости, имеется парашют 26, помещенный в обтекатель, состыкованный с обтекателем передней втулки 10 несущего ротора и закрепленный на стойке 23 шасси.
Ставка на чисто ручное управление в предлагаемой схеме летательного аппарата представляется проблематичной из за:
1. перекрестного влияния гироскопических сил несущего ротора на передаточные функции каналов управления, 2. отсутствия демпфирующего действия аэродинамических сил барабана по крену, 3. малого момента инерции аппарата по крену, что повышает требования к быстродействию управления, до величин, затруднительных для пилота, 4) отсутствия устойчивости равновесия по всем трем углам и трем перемещениям.
Поэтому в данной схеме практически все функции управления должны выполняться посредством автоматической системы управления.
Система управления 19 содержит датчик угла поворота барабана относительно фюзеляжа, гироскопические датчики углов крена, курса и тангажа относительно земли, датчики ускорений фюзеляжа по трем координатам, датчики положений органов управления летательным аппаратом, а также процессор с соответствующим программным обеспечением, соединенный выходом с четырьмя сервоприводами, входящими в состав механизмов 11 и 12 управления углом атаки лопастей 5 (см. фиг. 5).
Тормозной ТТРД 27 мягкой аварийной посадки размещен внутри фюзеляжа 2 с возможность его выдвижения через створки фюзеляжа (не показаны). Имеется также механизмы управления положением ТТРД и углами его ориентации, обеспечивающие возможность совмещения его оси тяги с центром массы летательного аппарата и с направлением вектора скорости сближения аппарата с землей (не показаны).
Действует предлагаемый летательный аппарат следующим образом. Барабан 1 приводится в равномерное вращение двигателем 20. При этом установленные шарнирно на барабане 1 лопасти, за счет связи посредством тяг 18 с неподвижными кривошипами 13 механизмов 11 и 12, меняют свой угол атаки, изменяя его за время оборота ротора синусоидально с изменением знака при переходе с верхней части барабана на нижнюю. При этом подъемная сила лопасти также изменяется синусоидально и знакопеременно, как показано на фиг. 6. При этом распределение плотности вертикальной составляющей подъемной силы по диаметру окружности будет также синусоидальным, т.к., наклон векторов на краях диаметра компенсируется увеличением длины дуги, проектирующейся на края диаметра. Таким образом барабан 1 создает подъемную силу, которая мало зависит от скорости полета в направлении оси несущего ротора.
Суммируемая под прямым углом с окружной скоростью, скорость полета создает скос потока обтекания профиля крыла (см. фиг. 7). Скос потока до 45 градусов мало влияет на эффективность работы крыла, но скорость обтекания профиля увеличивается, что приводит к двухкратному увеличению несущей способности крыла. Т.о. в крейсерском полете предлагаемого летательного аппарата возникает резерв несущей способности лопастей (в отличие от вертолета, у которого несущая способность лопастей, наоборот, резко падает при скоростях полета, составляющих всего половину окружной скорости вращения лопастей. В предлагаемом летательном аппарате увеличение скорости зависит лишь от располагаемой мощности двигателя, расходуемой главным образом на преодоление аэродинамического сопротивления по Сх, включая профильное сопротивление лопастей. У вертолета же скоростной барьер, равный окружной скорости полета, за счет только мощности двигателя не преодолим. Предлагаемая схема летательного аппарата, в отношении суммарного аэродинамического сопротивления, хуже вертолета, т.к. имеется значительное сопротивление спиц 8, ободов 7 и стоек 23 шасси. Но, как показывают расчетные оценки частных конструктивных решений, предельная скорость полета предлагаемого летательного аппарата все же больше чем у вертолета, хотя экономическая скорость примерно равна максимальной скорости полета вертолетов.
Рассмотрим процессы управления полетом.
Если одновременно увеличивать эксцентриситет кривошипа 13 на обоих механизмах 11 и 12 управления циклическим углом атаки лопастей, т.е. одновременно увеличивать амплитуду синусоидального изменения угла атаки по окружности барабана (см. фиг. 6), то будет возрастать абсолютная величина суммарного вектора подъемной силы всех лопастей, что соответствует введению общего шага автомата перекоса на вертолете. Если увеличение эксцентриситета кривошипов 13 производить дифференциально, то возникнет крутка лопастей по длине. При этим суммарный вектор подъемной силы сместиться в прдольном (по отн. к направлению оси барабана 1) направлении. В результате возникнет момент силы, действующий на барабан 1 по тангажу. Если изменить положение кривошипов 13 вдоль окружности вращения барабана, то измениться направление вектора суммарной подъемной силы. В результате возникнет ускорение ЛА в боковом направлении. Если указанное смещение кривошипов 13 производить дифференциально, то передняя и задняя части барабана будут тянуть в разные стороны. В результате возникнет момент рыскания. У казанные моменты приведут к соответствующим изменениям угловой ориентации оси барабана 1, но не напрямую, а с учетом перекрестного влияния, создаваемого гироскопическими силами. Сущность этого влияния состоит в том, что момент силы по тангажу вызывает, пропорционально, не ускорение, а скорость по рысканию, и наоборот. У вертолета указанные эффекты существенного сглаживаются за счет аэродинамических сил из за машущих движений лопастей. Здесь машущие движения отсутствуют. Соответствующая гиродинамика проявляется сильно, что обуславливает необходимость производить управление посредством автопилота. Последнее также необходимо из за малых моментов инерции аппарата, обуславливающих большие скорости реагирования аппарата на действие рулей (аналогичное наблюдается в самолетах с малым размахом крыла).
Управление по крену в данном аппарате сводится к управлению действующим на фюзеляж суммарным моментом вращения вокруг продольной оси. Он равен сумме момента реакции от привода (по сути от редуктора) и момента от суммарной подъемной силы барабана, приложенной к оси барабана 1. Меняя направление вектора сумарной подъемной силы путем синхронного поворота кривошипов 13 вокруг оси, мы меняем плечо этой силы относительно центра массы фюзеляжа, т.к. центр массы, как уже говорилось, смещен отн. оси барабана. Величиной этого плеча, умноженной на модуль вектора подъемной силы определяется действующий на фюзеляж крутящий момент по крену относительно центра массы фюзеляжа. Сила тяжести не создает момента отн. центра массы. Т. о., управляя плечом суммарного вектора подъемной силы, мы можем управлять вращением фюзеляжа относительно своего центра массы. В частности, мы можем скомпенсировать действующий на фюзеляж реактивный момент от расположенного на фюзеляже редуктора двигателя. Здесь мы имеем дело с управлением, характеризующимся статической неустойчивостью второго порядка. Т.е. мы вынуждены управлять угловым перемещением, воздействуя на угловое ускорение. Однако это проще, чем удерживать карандаш на острие, и не представляет трудностей для автоматической системы управления. На фиг. 1 изображены вектор Р силы тяжести и вектор Т суммарной подъемной силы. Они равны по величине, взаимопараллельны и образуют пару сил с плечем «h», соответствующим равновесию с реактивным моментом двигателя. Если реактивный момент двигателя измениться, то плечо силы Т нужно будет изменить, изменив наклон вектора Т. При этом аппарат начнет ускоряться в боковом направлении. Это приведет к изменению наклона и местной силы тяжести Р. Так что силы Т и Р останутся взаимопараллельными. Но плечо измениться. Таким образом может быть найдено равновесие моментов. Однако цель управления состоит в том, чтобы, отклоняя моменты от равновесия, вызывать угловые ускорения по крену, через которые обеспечивать стабилизацию крена. Несмотря на такую кажущуюся сложность функционирования системы управления второго порядка, практически мы встречаемся с этим повседневно при ходьбе, езде на велосипеде и т.п..
Рассмотрим, далее, работу системы аварийной посадки без двигателя. ТТРД 27 должен быть выдвинут в рабочее положение перед взлетом и перед посадкой и убираться в фюзеляж только на высотах более 20 м. Если отказ двигателя произошел на высоте менее 20 метров, то ТТРД способен погасить скорость приземления до нуля, если с помощью системы автоматического управления соринтировать ось его тяги вдоль вектора скорости сближения с землей, которая измеряется датчиками (оптическими, радиолокационными и т.п.). При этом также следут соблюсти условие пересечения оси тяги ТТРД с центром массы аппарата. Это обеспечивается автоматически блоком 19 при заблаговременном введении в него параметров центровки аппарата с поправкой на расход топлива. Нерегулируемость тяги ТТРД допустима, если полагаться также на пассивную защиту со стороны конструкции ЛА. Если отказ двигателя произошел на высоте более 20 м, то выпускают парашют 26, Который тормозит и ориентирует аппарат (к сожалению с наклоном, что должно быть учтено при ориентации ТТРД).
Ниже приведеы результаты расчетной оценки параметров предлагаемого ЛА в одном из возможных вариантов его реализации.
Распределение мощностей при скорости полета 50 м/сек=180 км/час:

Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов вертикального взлета и посадки. Безаэродромный летательный аппарат содержит фюзеляж и установленный на нем несущий ротор с лопастями, соединенными с механизмом циклического изменения угла атаки лопастей. Несущий ротор выполнен в виде барабана, ось вращения которого направлена, преимущественно, вдоль направления полета летательного аппарата, а лопасти ориентированы своей длиной вдоль образующей цилиндрической боковой поверхности барабана. Механизм циклического изменения угла атаки лопастей выполнен в виде кривошипа, установленного на неподвижном относительно фюзеляжа основании с возможностью двухкоординатного изменения своего положения в плоскости вращения несущего барабана. Аппарат содержит два устройства циклического управления углом атаки лопастей, соединенных с разными участками длины каждой лопасти и с независимыми каналами управления. Обеспечивается повышение надежности и ресурса работы механизмов несущего ротора, уменьшение шума от лопастей, снижение опасности, создаваемой вращающимися частями. 7 з.п. ф-лы, 7 ил. 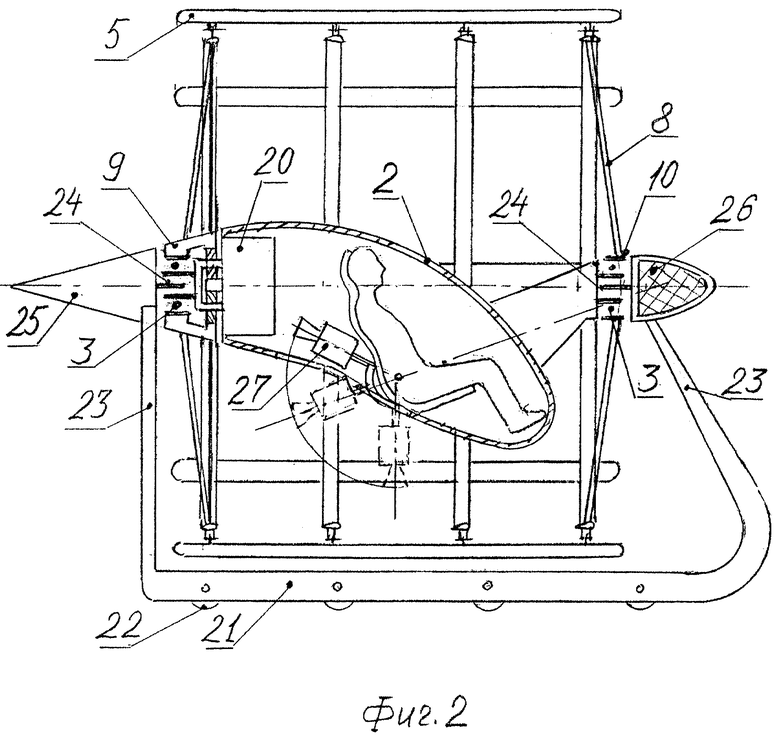
1. Безаэродромный летательный аппарат, содержащий фюзеляж и установленный на нем несущий ротор с лопастями, соединенными с механизмом циклического изменения угла атаки лопастей, отличающийся тем, что несущий ротор выполнен в виде барабана, ось вращения которого направлена, преимущественно, вдоль направления полета летательного аппарата, а лопасти ориентированы своей длиной вдоль образующей цилиндрической боковой поверхности барабана.
2. Безаэродромный ЛА по п. 1, отличающийся тем, что механизм циклического изменения угла атаки лопастей выполнен в виде кривошипа, установленного на неподвижном относительно фюзеляжа основании с возможностью двухкоординатного изменения своего положения в плоскости вращения несущего барабана и соединенного со всеми лопастями посредством обоймы, установленной на указанном кривошипе на подшипнике, и тяг.
3. Безаэродромный ЛА по п. 1, отличающийся тем, что он содержит два устройства циклического управления углом атаки лопастей, соединенных с разными участками длины каждой лопасти и с независимыми каналами управления.
4. Безаэродромный ЛА по п. 1, отличающийся тем, что фюзеляж подвешен на подшипниках внутри несущего барабана, а центр массы фюзеляжа смещен относительно оси вращения барабана.
5. Безаэродромный ЛА по п. 4, отличающийся тем, что обтекатель фюзеляжа продлен за пределы полости несущего барабана и стыкуется с расположенной внутри барабана частью посредством сечения круглой формы, соосной барабану.
6. Безаэродромный ЛА по п. 4, отличающийся тем, что он содержит шасси, выполненное в виде лыж, в полости, которых установлены, с малым выступанием, ролики.
7. Безаэродромный ЛА по п. 4, отличающийся тем, что он содержит парашют аварийного спасения всего аппарата, который закреплен вне полости барабана и совмещен с обтекателем втулки ротора.
8. Безаэродромный ЛА по п. 7, отличающийся тем, что в фюзеляже установлен с возможностью выдвижения тормозной ТТРД, снабженный механизмом изменения его положения и ориентации по сигналам системы управления аварийной посадкой.
| АВИАПЛАТФОРМА С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 1994 |
|
RU2090452C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2682954C1 |
| KR 100558463 B1, 10.03.2006 | |||
| CN 102963525 A, 13.03.2013 | |||
| САМОЛЕТ-АМФИБИЯ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 1994 |
|
RU2125524C1 |

