Изобретение относится к области электрических исполнительных систем на борту самолетов.
Уровень техники
На борту самолета предусмотрено много систем, которые состоят из подвижных органов, которые должны перемещаться.
К таким подвижным органам принадлежат элементы крыла (например, элерон, закрылок, аэродинамический тормоз), элементы шасси (например, стойка шасси, способная перемещаться между выпущенным положением и втянутым положением, или плунжер тормоза колеса, который скользит относительно фрикционных элементов тормоза), элементы, позволяющие реализовать турбины с изменяемой геометрией, элементы насоса или топливодозирующего механизма, элементы реверсоров тяги, элементы приводного механизма шага воздушного винта (например, на вертолете или в турбовинтовом двигателе) и так далее.
На современных самолетах для реализации таких подвижных органов во все возрастающей степени используются электромеханические исполнительные механизмы. На самом деле, преимущества использования электромеханических исполнительных механизмов многочисленны: простота электрической разводки и управления, гибкость, простота технического обслуживания и т.д.
Электромеханический исполнительный механизм традиционно содержит подвижный исполнительный элемент, который перемещает подвижный орган; электродвигатель, предназначенный для приведения в движение подвижного исполнительного элемента и соответственно подвижного органа, и один или более датчик(ов) для различных параметров электромеханического исполнительного механизма.
Бортовая электрическая исполнительная система, в которую интегрирован такого рода электромеханический исполнительный механизм, традиционно выполняет следующие функции: определение задаваемого значения в соответствии с функцией, подлежащей выполнению (например, задаваемое значение скорости, координаты или силы), измерение параметра серворегулирования электромеханического исполнительного механизма (например, скорости, координаты, силы), исполнение цикла серворегулирования, позволяющего электромеханическому исполнительному механизму достигать этого задаваемого значения, генерирование электрического тока, питающего электродвигатель, и преобразование, посредством электродвигателя, электрической энергии в механическую энергию, которая приводит в движение исполнительный элемент, и, соответственно, подвижный орган.
Функции исполнения цикла серворегулирования и генерирования питающего электрического тока выполняются в одном или более централизованном компьютере (централизованных компьютерах): это называется централизованной архитектурой.
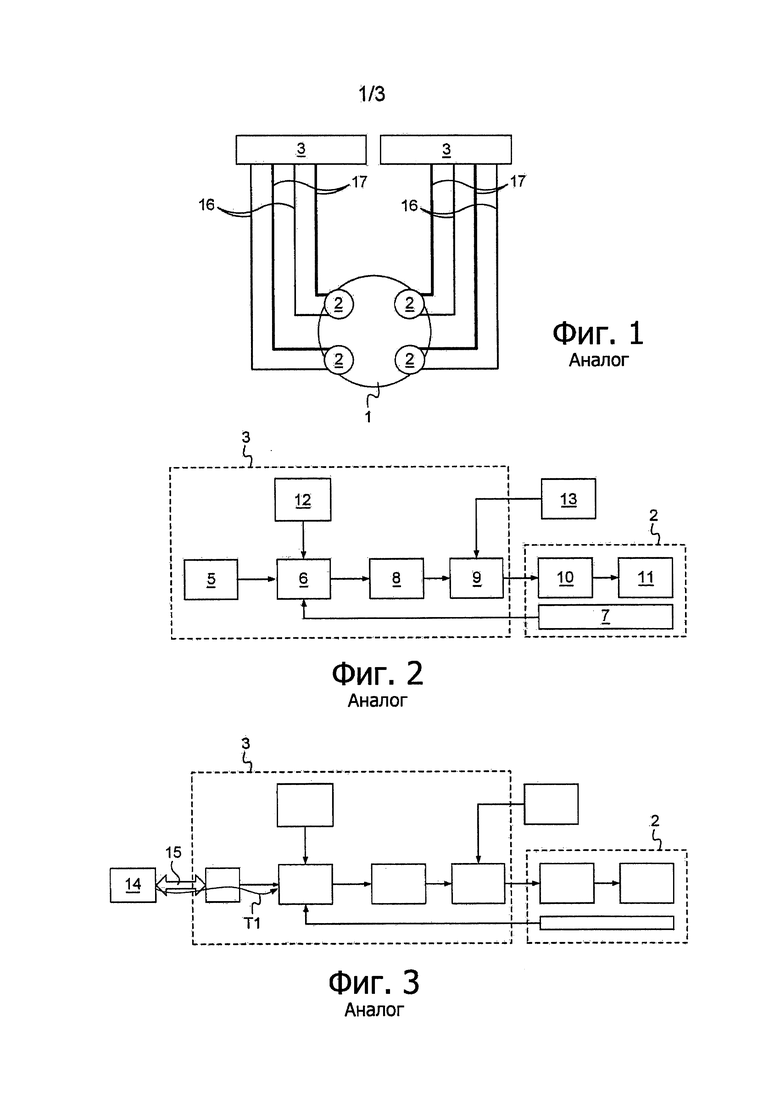
Обратимся к фиг. 1, на которой известный тормоз (1) самолета содержит четыре электромеханических исполнительных механизма (2), которые сгруппированы в две отдельные группы, состоящие из двух электромеханических исполнительных механизмов (2). Электромеханические исполнительные механизмы (2) из отдельной группы соединены с одним и тем же централизованным компьютером (3), расположенном в отсеке самолета. Электродвигатель каждого электромеханического исполнительного механизма (2) получает электрический ток, подаваемый централизованным компьютером (3), с которым соединен этот электромеханический исполнительный механизм (2), и каждый электромеханический исполнительный механизм (2) передает результаты измерения параметра серворегулирования (например, результаты измерений углового положения ротора электродвигателя) централизованному компьютеру (3).
Соответственно, существуют две различные архитектуры такого рода централизованной архитектуры, различие между которыми может быть проведено по тому месту, в котором определяется задаваемое значение.
В первой архитектуре, показанной на фиг. 2, задаваемое значение определяют средства (5) генерирования задаваемого значения, входящие в состав каждого централизованного компьютера (3), и передают это значение средствам (6) обработки данных, входящим в состав централизованного компьютера (3). После этого, средства (6) обработки данных, входящие в состав централизованного компьютера (3), выполняют цикл серворегулирования. Электромеханический исполнительный механизм (2) передает на централизованный компьютер (3) результаты измерения параметра серворегулирования, полученные от датчика (7), причем упомянутые результаты измерения представляют собой сигнал обратной связи цикла серворегулирования. Выходной сигнал цикла серворегулирования передается в управляющее средство (8) модуля энергоснабжения, затем в модуль (9) энергоснабжения, входящий в состав, централизованного компьютера (3), генерирующий электрический ток, питающий электродвигатель (10) электромеханического исполнительного механизма (2). Электродвигатель (10) затем приводит в движение исполнительный элемент (11). Реализация цикла серворегулирования требует параметров, хранящихся в памяти (12) централизованного компьютера (3). Модуль (9) энергоснабжения, входящий в состав централизованного компьютера (3), запитывается от блока (13) питания, находящегося вне централизованного компьютера (3).
Во второй архитектуре, показанной на фиг. 3, централизованный компьютер (3) специально предназначен для серворегулирования электромеханического исполнительного механизма (2) и для генерации питающего электрического тока, и он больше не определяет задаваемое значение, которое предоставляется другим оборудованием (14), например, через цифровую шину (15) (эта передача данных символически обозначена ссылочной позицией (Т1) на фиг. 3).
Следует отметить, что обе архитектуры имеют некоторые недостатки. Централизованный компьютер (3) таким образом должен быть масштабирован в соответствии с технологией используемого электромеханического исполнительного механизма (2), и параметры цикла серворегулирования должны быть приспособлены к размерам используемого электромеханического исполнительного механизма (2). Таким образом, имеется тенденция к формированию пары из централизованного компьютера (3) и электромеханического исполнительного механизма (2), что делает изменение в электромеханическом исполнительном механизме (2) и изменение в параметризации цикла серворегулирования, следующие в результате изменения технологии, очень сложными и очень дорогостоящими.
Помимо этого, электрические провода между централизованным компьютером (3) и электромеханическим исполнительным механизмом (2) передают сильно изменяющийся электрический ток, что требует принятия сложных мер предосторожности для контроля электромагнитных излучений.
Задача изобретения
Изобретение направлено на снижение сложности и стоимости электрической исполнительной системы.
Сущность изобретения
Для достижения этой цели, предлагается исполнительная система для самолета, которая содержит:
- электромеханический исполнительный механизм, который содержит: электродвигатель; модуль энергоснабжения, предназначенный для того, чтобы генерировать электрический ток, подаваемый на электродвигатель; измерительное средство, приспособленное для измерения некоторой регулируемой величины в электромеханическом исполнительном механизме и для генерирования цифрового сигнала измерения, представляющего эту серворегулируемую величину; и энергонезависимую память, в которой хранятся сохраняемые данные, включающие в себя данные о конфигурации, специфические для этого электромеханического исполнительного механизма;
- управляющий блок, предназначенный для того, чтобы исполнять алгоритм серворегулирования, получая и используя данные о конфигурации для того, чтобы приспособить алгоритм серворегулирования к этому электромеханическому исполнительному механизму, при этом алгоритм серворегулирования осуществляет цикл серворегулирования, сигнал обратной связи которого представляет собой цифровой сигнал измерения, а выходной сигнал которого представляет собой цифровой сигнал, управляющий электродвигателем электромеханического исполнительного механизма, предназначенный для модуля энергоснабжения;
- по меньшей мере, один канал передачи данных, соединяющий управляющий блок и электромеханический исполнительный механизм и позволяющий направлять цифровой сигнал измерения, сохраняемые данные и цифровой управляющий сигнал.
Используя энергонезависимую память, расположенную в электромеханическом исполнительном механизме и содержащую данные о конфигурации, специфические для этого электромеханического исполнительного механизма, позволяет сделать управляющий блок совместно используемым при использовании его в различных электрических исполнительных системах, интегрирующих различные электромеханические исполнительные механизмы. Стоимость таких электрических исполнительных систем и сложность разработки упомянутых систем, соответственно, уменьшается, поскольку больше нет необходимости полностью разрабатывать управляющий блок для каждой из упомянутых систем. Помимо этого, проектирование управляющего блока больше не требует знания данных о конфигурации, специфических для используемого электромеханического исполнительного механизма, (и даже больше не требует знания технологии, специфической для используемого электромеханического исполнительного механизма). Взаимодействия, требующиеся между работами по разработке управляющего блока и электромеханического исполнительного механизма, соответственно, уменьшаются, и сложность такой разработки, а, следовательно, стоимость электрических исполнительных систем еще уменьшается.
Другие характеристики и преимущества изобретения станут очевидны после прочтения нижеследующего описания конкретных неограничивающих вариантов воплощения изобретения.
Краткое описание чертежей
Дается ссылка на прилагаемые чертежи, на которых
на фиг. 1 показана архитектура тормозной системы предшествующего уровня техники;
на фиг. 2 показана первая исполнительная система предшествующего уровня техники;
на фиг. 3 показана вторая исполнительная система предшествующего уровня техники;
на фиг. 4 показана архитектура тормозной системы, относящаяся к системе, соответствующей первому варианту осуществления изобретения;
на фиг. 5 показана архитектура тормозной системы, относящейся к системе, соответствующей второму варианту осуществления изобретения;
на фиг. 6 показана исполнительная система, соответствующая первому варианту осуществления изобретения;
на фиг. 7 показана исполнительная система, соответствующая второму варианту осуществления изобретения;
на фиг. 8 показана исполнительная система, соответствующая третьему варианту осуществления изобретения;
на фиг. 9 показана исполнительная система, соответствующая четвертому варианту осуществления изобретения.
Осуществление изобретения
Изобретение реализовано здесь на самолете, который содержит множество основных шасси каждое из которых несет на себе множество так называемых "оснащенных тормозом" колес, то есть множество колес, оборудованных тормозом, предназначенным для торможения самолета. Настоящее описание относится к одному оснащенному тормозом колесу, но изобретение, конечно же, применяется таким же образом ко всем или к части оснащенных тормозами колесам самолета или к любому другому устройству в самолете или к его механизации, внедряющей электромеханический исполнительный механизм.
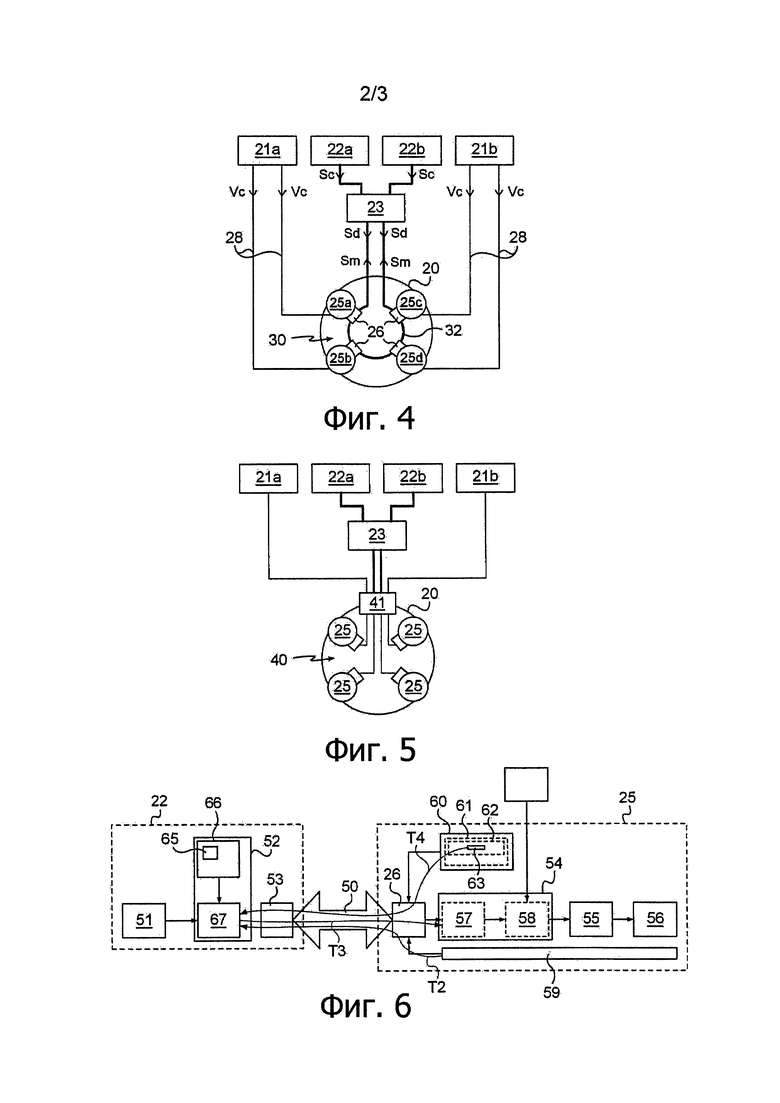
Обратимся к фиг. 4, на которой архитектура тормозной системы, соответствующая первому варианту осуществления изобретения, соответственно, содержит тормоз (20), предназначенный для того, чтобы тормозить колесо самолета, первый блок (21а) питания, второй блок (21b) питания, первый управляющий блок (22а), второй управляющий блок (22b) и сетевой коммутатор (23).
Тормоз (20) содержит держатель исполнительных механизмов, на котором установлено четыре тормозных электромеханических исполнительных механизма (25а), (25b), (25с), (25d) и фрикционные элементы, то есть пакет углеродных дисков.
Четыре электромеханических исполнительного механизма (25) используются для того, чтобы прикладывать силу торможения к пакету углеродных дисков и, соответственно, создавать на колесе тормозной момент, который замедляет вращение колеса и, соответственно, замедляет самолет, когда последний касается земли.
Каждый электромеханический исполнительный механизм (25) содержит корпус, прикрепленный к держателю исполнительных механизмов, плунжер и запирающий элемент, приспособленный для того, чтобы запирать плунжер в его положении. В корпус каждого электромеханического исполнительного механизма (25) интегрированы электродвигатель, модуль энергоснабжения и модуль (26) цифровой связи.
Плунжер приводится в движение электродвигателем таким образом, чтобы скользить и прикладывать силу торможения к пакету углеродных дисков.
Модуль энергоснабжения позволяет генерировать переменный питающий электрический ток, который циркулирует в трех фазах электродвигателя, когда плунжер должен быть приведен в движение для того, чтобы затормозить колесо. С этой целью, модуль энергоснабжения содержит инвертор, содержащий множество переключателей, которые управляются таким образом, чтобы преобразовать постоянное напряжение (Vc) питания в переменное напряжение, при котором генерируется электрический ток, питающий электродвигатель.
Напряжения (Vc) питания, получаемые модулями энергоснабжения четырех электромеханических исполнительных механизмов (25) тормоза (20) подаются первым блоком (21а) питания и вторым блоком (21b) питания.
Четыре электромеханических исполнительного механизма (25) сгруппированы в первую группу и вторую отличную от нее группу, при этом первая группа содержит электромеханические исполнительные механизмы (25а) и (25b), и вторая группа содержит электромеханические исполнительные механизмы (25с) и (25d).
Первый блок (21а) питания подает напряжение (Vc) питания на модули энергоснабжения электромеханических исполнительных механизмов (25а) и (25b) первой группы, а второй блок (21b) питания подает напряжение питания на модули энергоснабжения электромеханических исполнительных механизмов (25с) и (25d) второй группы.
Для получения напряжения (Vc) питания, каждый электромеханический исполнительный механизм (25) соединен с первым блоком (21а) питания или со вторым блоком (21b) питания двумя проводами (28) подачи электроэнергии.
Первый блок (21а) питания и второй блок (21b) питания размещены в отсеке, в фюзеляже самолета, над шасси.
Помимо этого, модуль энергоснабжения каждого электромеханического исполнительного механизма (25) использует цифровой управляющий сигнал (Sc) для того, чтобы управлять переключателями инвертора.
Цифровые управляющие сигналы (Sc) четырех электромеханических исполнительных механизмов (25) генерируются первым управляющим блоком (22а) и вторым управляющим блоком (22b).
При этом каждый управляющий блок (22) генерирует цифровые управляющие сигналы (Sc), посылаемые четырем электромеханическим исполнительным механизмам (25). Первый управляющий блок (22а) и второй управляющий блок (22b), таким образом, являются дублирующими друг друга, так, чтобы потеря одного из этих двух управляющих блоков (22) не влияла на тормозные характеристики.
Первый управляющий блок (22а) и второй управляющий блок (22b) размещены в отсеке, в фюзеляже самолета, над шасси.
Распределение цифровых управляющих сигналов (Sc) по модулям энергоснабжения четырех электромеханических исполнительных механизмов (25) осуществляется через модули (26) цифровой связи четырех электромеханических исполнительных механизмов (25), при этом каждый модуль (26) цифровой связи одного электромеханического исполнительного механизма (25) передает модулю энергоснабжения и, соответственно, инвертору модуля энергоснабжения упомянутого электромеханического исполнительного механизма (25) цифровые управляющие сигналы (Sc), которые должны быть ему посланы.
Модули (26) цифровой связи четырех электромеханических исполнительных механизмов (25) соединены таким образом, чтобы образовывать цифровую сеть (30) (цифровое сетевое средство, здесь, сборочную единицу из взаимосвязанных устройств, поддерживающих между собой связь, обменивающихся данными как цифровыми сигналами). Цифровая сеть (30) здесь имеет форму кольца.
В цифровую сеть (30) интегрирован сетевой коммутатор (23), который соединен с первым управляющим блоком (22а) и со вторым управляющим блоком (22b).
Сетевой коммутатор (23), соответственно, соединен с модулями (26) цифровой связи двух электромеханических исполнительных механизмов (25) тормоза (25а) и (25с), образуя также один из объектов, формирующих замкнутый контур кольцеобразной цифровой сети (30), с модулями (26) цифровой связи четырех электромеханических исполнительных механизмов (25), образующими другие объекты. Каждый объект (модуль (26) цифровой связи или сетевой коммутатор (23)) цифровой сети (30) соединен четырьмя электрическими проводами (32) связи с двумя отличными от него объектами.
Сетевой коммутатор (23) управляет функционированием цифровой сети (30), распределяя цифровые управляющие сигналы (Sc) от первого управляющего блока (22а) и второго управляющего блока (22b) через цифровую сеть (30) по модулям (26) цифровой связи.
Сетевой коммутатор (23) здесь расположен с первым управляющим блоком (22 а) и со вторым управляющим блоком (22b) в одном и том же корпусе (который, соответственно, размещен в отсеке, в фюзеляже самолета, над шасси).
Передача модулям (26) цифровой связи и соответственно модулям энергоснабжения, цифровых управляющих сигналов (Sc) от управляющих блоков (22), а также подача на модули энергоснабжения напряжения (Vc) питания от блоков (21) питания требуют, таким образом, шестнадцать электрических проводов, которые идут от верхней части шасси к тормозу (20), вместо двадцати восьми электрических проводов в архитектуре, показанной на фиг. 1.
Следует отметить, что цифровая сеть (30), которая только что была раскрыта, не используется только для передачи цифровых управляющих сигналов (Sc) модулям энергоснабжения электромеханических исполнительных механизмов (25).
Цифровые сигналы (Sm) восходящей линии связи также передаются от тормоза (20) в управляющие блоки (22) через цифровую сеть (30) и, соответственно, через сетевой коммутатор (23).
Цифровые сигналы (Sm) восходящей линии связи, во-первых, содержат цифровые сигналы измерения, выдаваемые модулями (26) цифровой связи и выдаваемые датчиками, интегрированными в электромеханические исполнительные механизмы (25). Цифровые сигналы измерения здесь представляют собой сигналы для измерения углового положения роторов электродвигателей, сигналы для измерения электрических токов, питающих электродвигатели, и сигналы для измерения силы, создаваемой исполнительными элементами электромеханических исполнительных механизмов (25).
Сигналы измерения электрического тока выдаются для каждого электромеханического исполнительного механизма (25) из датчика углового положения, интегрированного в упомянутый электромеханический исполнительный механизм (25).
Сигналы измерения электрического тока выдаются для каждого электромеханического исполнительного механизма (25) из датчика тока, интегрированного в упомянутый электромеханический исполнительный механизм (25).
Сигналы измерения силы выдаются для каждого электромеханического исполнительного механизма (25) из датчика силы, интегрированного в упомянутый электромеханический исполнительный механизм (25).
Сигналы измерения углового положения, электрического тока и силы преобразуются в цифровую форму модулями (26) цифровой связи, выдаются в цифровую сеть (30) и используются управляющими блоками (22) для генерирования цифровых управляющих сигналов (Sc) и управления электродвигателями четырех электромеханических исполнительных механизмов (25).
Цифровые сигналы (Sm) восходящей линии связи, кроме того, содержат сигналы мониторинга электромеханических исполнительных механизмов (25), выдаваемые модулями (26) цифровой связи.
Сигналы мониторинга электромеханических исполнительных механизмов (25) предназначены для того, чтобы сообщать о состоянии электромеханических исполнительных механизмов (25), из чего управляющие блоки (22) могут принять решение о заказе технического обслуживания или о полном или частичном выведении из работы одного или более электромеханического исполнительных механизма (электромеханических исполнительных механизмов) (25).
Наконец, цифровые сигналы (Sm) восходящей линии связи содержат сигналы измерения, переданные электромеханическим исполнительным механизмам (25) внешним датчиком, расположенным на колесе (не показанным на фиг. 4). Этот внешний датчик здесь представляет собой датчик тормозного момента, расположенный на тормозе (20). Этот внешний датчик интегрирован в цифровую сеть (30) (он также образует один объект кольцевой цифровой сети). Он содержит цифровой интерфейс, который, как и модули (26) цифровой связи, упомянутые выше, позволяет внешнему датчику передавать результаты измерений крутящего момента управляющим блокам (22) через цифровую сеть (30).
Помимо этого, в дополнение к цифровым управляющим сигналам (Sc), от управляющих блоков (22) тормозу (20) через цифровую сеть (30) передаются дополнительные цифровые сигналы (Sd) нисходящей линии связи.
Дополнительные цифровые сигналы (Sd) нисходящей линии связи, во-первых, содержат сигналы функционального тестирования электромеханических исполнительных механизмов (25) и сигналы санкций.
Сигналы функционального тестирования запускают исполнение функциональных тестов электромеханическими исполнительными механизмами (25) в целях проведения диагностирования, касающегося функционирования электромеханических исполнительных механизмов (25) (и, если требуется, то касающегося эффективности передачи данных от электромеханических исполнительных механизмов (25) и к ним).
Сигналы санкций позволяют управляющим блокам (22) ''наказывать'' электромеханический исполнительный механизм (25), полностью или частично выводя его из работы или исключая его модуль (26) цифровой связи из цифровой сети (30).
Дополнительные цифровые сигналы (Sd) нисходящей линии связи также содержат сигналы для управления другим оборудованием, установленным на колесе, то есть, здесь -вентилятором (20) тормоза (не показанным на фиг. 4). Вентилятор (20) тормоза интегрирован в цифровую сеть (30) (он также образует один объект кольцевой цифровой сети). Он содержит цифровой интерфейс, который, как и модули (26) цифровой связи, упомянутые выше, позволяет вентилятору (20) тормоза принимать управляющие сигналы от управляющих блоков (22) через цифровую сеть (30).
В архитектуре тормозной системы, соответствующей второму варианту воплощения изобретения, показанной на фиг. 5, цифровая сеть, на этот раз, представляет собой звездообразную цифровую сеть (40).
Сетевой коммутатор (23) образует узел цифровой звездообразной сети (40), с которым соединены все электромеханические исполнительные механизмы (25) тормоза (20).
Следует отметить, что архитектура тормозной системы, соответствующая второму варианту воплощения изобретения, содержит, в дополнение к четырем электромеханическим исполнительным механизмам (25), блоки (21) подачи электроэнергии, два управляющих блока (22) и сетевой коммутатор (23), соединительную коробку (41), установленную на держателях исполнительного механизма тормоза (20).
Четыре электромеханических исполнительного механизма (25), два блока (21) питания, два управляющих блока (22) и сетевой коммутатор (23) соединены с соединительной коробкой (41).
Соединительная коробка (41) принимает постоянное напряжение питания и цифровые сигналы нисходящей линии связи, упомянутые выше, и распределяет их по электромеханическим исполнительным механизмам (25) и датчику тормозного момента и вентилятору тормозы. Соединительная коробка (41) также принимает цифровые сигналы восходящей линии связи, упомянутые выше, и распределяет их сетевому коммутатору (23), который передает их обоим управляющим блокам (22).
Полезно, чтобы, безотносительно варианта воплощения архитектуры тормозной системы, запирающий элемент каждого электромеханического исполнительного механизма (25) также был интегрирован в цифровую сеть (30) или (40). Запирающий элемент в таком случае локально запитывается от напряжения питания, получаемого электромеханическим исполнительным механизмом (25) и подаваемого одним из блоков (21) питания. Запирающий элемент принимает управляющие команды через цифровую сеть (30), (40) и выдает в цифровую сеть (30), (40) информацию о своем состоянии.
Теперь более подробно опишем способ, которым каждый управляющий блок (22) управляет одним из четырех электромеханических исполнительных механизмов (25), и, соответственно, генерирует цифровые управляющие сигналы (Sc), подлежащие отправке такому электромеханическому исполнительному механизму (25).
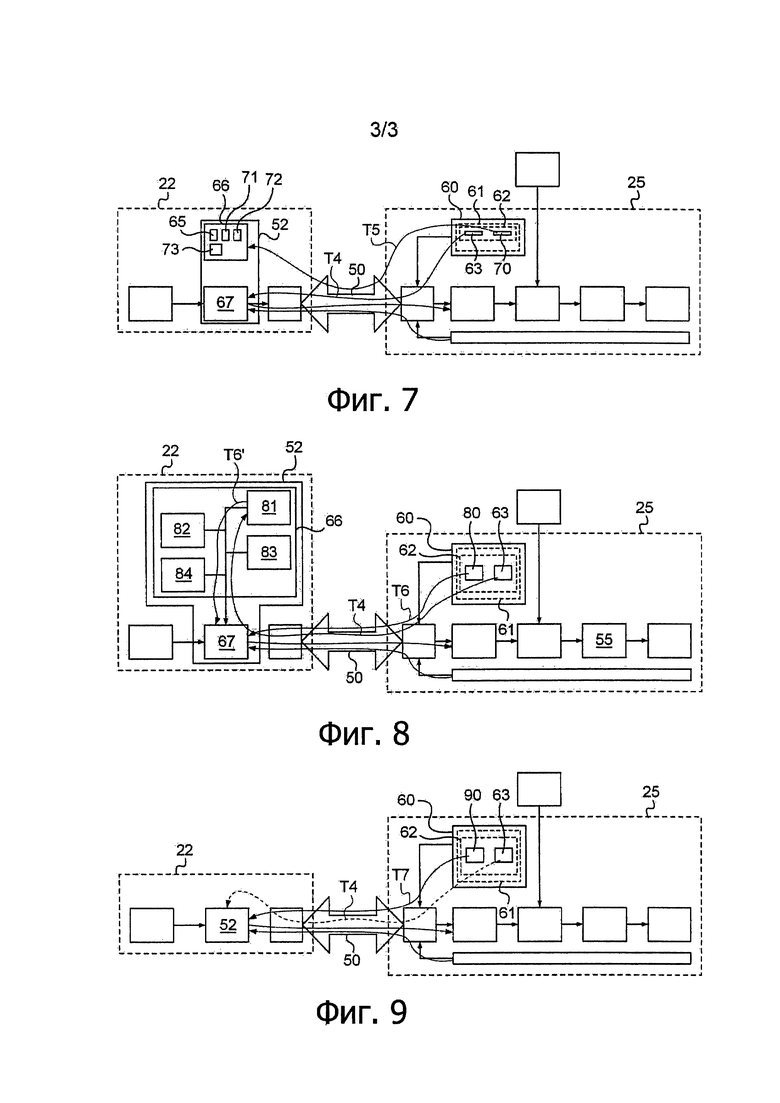
Обратимся к фиг. 6, полагая, что один из двух управляющих блоков (22) и один из четырех электромеханических исполнительных механизмов (25) образуют исполнительную систему, соответствующую первому варианту воплощения изобретения, которая, в дополнение к управляющему блоку (22) и электромеханическому исполнительному механизму (25), содержит канал (50) передачи цифровой информации, который соединяет управляющий блок (22) и электромеханический исполнительный механизм (25). Нижеследующее также относится к обоим управляющим блокам (22) и к четырем электромеханическим исполнительным механизмам (25), описанным выше.
В архитектурах тормозной системы, показанных на фиг. 4 и 5, канал (50) передачи цифровой информации состоит из электрических проводов, соединяющих управляющий блок (22) с сетевым коммутатором (23), через сетевой коммутатор (23), через соединительную коробку (41), если речь идет о фиг. 5, и через различные элементы цифровой сети (электрические провода, модули (26) связи других электромеханических исполнительных механизмов (25)), которые отделяют модуль (26) цифровой связи рассматриваемого электромеханического исполнительного механизма (25) от сетевого коммутатора (23).
Управляющий блок (22) содержит средство (51) генерирования задаваемого значения, средство (52) обработки данных и интерфейс (53) цифровой связи.
Как было видно выше, электромеханический исполнительный механизм (25) содержит модуль (26) связи, модуль (54) энергоснабжения, электродвигатель (55), плунжер (56)и измерительное средство (59), содержащее датчики (например, датчик тока, датчик углового или линейного положения, датчик силы или момента). Модуль (54) энергоснабжения содержит средство (57) управления инвертором и инвертор (58).
В дополнение к этому, электромеханический исполнительный механизм (25) содержит энергонезависимую память (60), в которой хранятся сохраняемые данные (61), включающие в себя данные (62) о конфигурации, специфические для этого электромеханического исполнительного механизма (25).
Данные (61) о конфигурации содержат параметры (63) серворегулирования, специфические для этого электромеханического исполнительного механизма (25), функция которых объясняется ниже.
Энергонезависимая память (60), запрограммированный во время изготовления электромеханического исполнительного механизма (25), совместима с условиями окружающей среды (температурой, вибрациями, ударами, электромагнитными возмущениями и так далее), которым подвергается электромеханический исполнительный механизм (25), который установлен на держателе исполнительного механизма тормоза. Полезно, чтобы энергонезависимая память (60) была интегрирована в полупроводниковый компонент модуля (26) цифровой связи.
Угловое положение, измеренное датчиком углового положения электромеханического исполнительного механизма (25), и электрический ток, измеренный датчиком тока электромеханического исполнительного механизма (25) представляют собой серворегулируемые величины в электромеханическом исполнительном механизме (25).
Измерительное средство (59) преобразует измеренные серворегулируемые величины в цифровые сигналы измерения, представляющие серворегулируемые величины.
Для управления электромеханическим исполнительным механизмом (25) средство (53) обработки данных, входящее в состав управляющего блока (22), исполняют алгоритм (67) серворегулирования, собственный код (65) которого хранится в памяти (66) средства (53) обработки данных.
Алгоритм (67) серворегулирования осуществляет три перемежающихся цикла серворегулирования, предназначенных для управления модулем (54) энергоснабжения электромеханического исполнительного механизма (25) через цифровой канал (50): цикл серворегулирования электрического тока, цикл серворегулирования скорости и цикл серворегулирования положения.
Задаваемое значение для каждого цикла серворегулирования представляет собой задаваемое значение, генерируемое средством (51) генерирования задаваемого значения, входящим в состав управляющего блока (22) или другого управляющего блока самолета.
Сигнал обратной связи цикла серворегулирования электрического тока представляет собой цифровой сигнала измерения, представляющий электрический ток, а сигналы обратной связи циклов серворегулирования скорости и положения представляют собой цифровые сигналы измерения, представляющие угловое положение. Сигналы обратной связи передаются модулем (26) цифровой связи электромеханического исполнительного механизма (25) управляющему блоку (22) через канал (50) передачи цифровой информации (передача (Т2) данных на фиг. 6).
Выходной сигнал алгоритма серворегулирования представляет собой цифровой сигнал (55) управления электродвигателем, подлежащий отправке модулю (54) энергоснабжения (передача (Т3)данных на фиг. 6).
Цифровые управляющие сигналы передаются модулю (54) энергоснабжения электромеханического исполнительного механизма (25) через цифровой интерфейс (53) управляющего блока (22), канал (50) передачи цифровой информации и модуль (26) цифровой связи электромеханического исполнительного механизма (25) (передача (Т3) данных на фиг. 6). Затем, средство (57) управления инвертором, входящее в состав модуля (54) энергоснабжения управляет инвертором (58), который генерирует электрический ток, подаваемый на электродвигатель (55) для того, чтобы приводить в движение плунжер (56)электромеханического исполнительного механизма (25), в соответствии с задаваемым значением.
При осуществлении цикла серворегулирования используются параметры (63) серворегулирования, специфические для этого электромеханического исполнительного механизма (25), которые здесь содержат пропорциональный коэффициент, интегральный коэффициент и производный коэффициент, и ограничение по положению, ограничение по скорости и ограничение по мощности электромеханического исполнительного механизма (25).
Перед использованием электромеханического исполнительного механизма (25), например, при запуске управляющего блока (22) и электромеханического исполнительного механизма (25), средства (52) обработки данных, входящие в состав управляющего блока (22), соответственно, получают параметры (63) серворегулирования, хранящиеся в энергонезависимой памяти (60) электромеханического исполнительного механизма (25), и интегрируют их в циклы серворегулирования (передача (Т4) данных на фиг. 6). Средства (52) обработки данных затем имеют все данные, требующиеся для исполнения алгоритма (67) серворегулирования и циклов серворегулирования.
Любое изменение в конструкции электромеханического исполнительного механизма (25), требующее изменение в параметрах (63) серворегулирования, специфических для этого электромеханического исполнительного механизма (25), может, таким образом, быть осуществлено при сохранении новых параметров (63) серворегулирования в энергонезависимой памяти (60) электромеханического исполнительного механизма (25), и только, и, таким образом, без изменения управляющего блока (22). Затраты, которые влечет за собой изменение в конструкции электромеханического исполнительного механизма (25), таким образом, уменьшаются.
Обратимся к фиг. 7, на которой исполнительная система, соответствующая второму варианту воплощения изобретения, вновь содержит управляющий блок (22), электромеханический исполнительный механизм (25) и канал (50) передачи цифровой информации.
Энергонезависимая память (60) электромеханического исполнительного механизма (25) в системе, соответствующей второму варианту воплощения изобретения, также используется для параметризации других алгоритмов.
Данные (62) о конфигурации из числа сохраняемых данных (61), хранящихся в энергонезависимой памяти (60), содержат, в дополнение к параметрам (63) серворегулирования, относящимся к алгоритму (67) серворегулирования, параметры (70) алгоритма обнаружения неисправности и/или алгоритма (72) следования тренду и/или алгоритма (73) подсчета циклов.
Алгоритм (71) обнаружения неисправности, алгоритм (72) следования тренду и алгоритм (73) подсчета циклов хранятся в памяти (66) средства (52) обработки данных, входящего в состав управляющего блока (22). Когда должен быть исполнен один из этих алгоритмов (71), (72), (73), управляющий блок (22) получает соответствующие параметры (70) (передача (Т5) данных на фиг. 7).
Обратимся к фиг. 8, на которой исполнительная система, соответствующая третьему варианту воплощения изобретения, вновь содержит управляющий блок (22), электромеханический исполнительный механизм (25) и канал (50) передачи цифровой информации.
Энергонезависимая память (60) электромеханического провода (25), входящего в состав исполнительной системы, соответствующей третьему варианту воплощения изобретения, также используется для хранения идентификатора (80) алгоритма серворегулирования, подлежащего использованию для электромеханического исполнительного механизма (25).
Данные (62) о конфигурации из числа сохраняемых данных (61), хранящихся в энергонезависимой памяти (60), содержат идентификатор (80), который позволяет средству (52) обработки данных, входящему в состав управляющего блока (22), выбрать алгоритм серворегулирования, подлежащий использованию, из числа списка алгоритмов серворегулирования, хранящихся в памяти (66) средства (52) обработки данных.
Этот список алгоритмов серворегулирования содержит: алгоритм (81) серворегулирования для электромеханического исполнительного механизма с электродвигателем переменного тока, алгоритм (82) серворегулирования для электромеханического исполнительного механизма с электродвигателем постоянного тока, алгоритм (83) серворегулирования для электромеханического исполнительного механизма с моментным электродвигателем, алгоритм (84) серворегулирования для электромеханического исполнительного механизма с шаговым электродвигателем.
Электродвигатель (55) электромеханического исполнительного механизма (25) здесь представляет собой электродвигатель переменного тока. Перед использованием электромеханического исполнительного механизма (25), например, при запуске управляющего блока (22) и электромеханического исполнительного механизма (25), средства (52) обработки данных, входящие в состав управляющего блока (22), соответственно, получают идентификатор (80), хранящийся в энергонезависимой памяти (60) электромеханического исполнительного механизма (25) (передача (Т6) и (Т6'') данных на фиг. 8). Средства (52) обработки данных выбирают и затем исполняют алгоритм (81) серворегулирования для электромеханического исполнительного механизма с электродвигателем переменного тока.
Изменение технологии электродвигателя, (55) электромеханического исполнительного механизма (25), которое требует использования другого алгоритма серворегулирования, предварительно сохраненного в памяти (66) средства (52) обработки данных, может, таким образом, быть осуществлено при сохранении нового идентификатора в энергонезависимой памяти (60) электромеханического исполнительного механизма (25), и только, без изменения управляющего блока (22).
Обратимся к фиг. 9, на которой исполнительная система, соответствующая четвертому варианту воплощения изобретения, вновь содержит управляющий блок (22), электромеханический исполнительный механизм (25) и канал (50) передачи цифровой информации.
Энергонезависимая память (60) электромеханического исполнительного механизма (25) в системе, соответствующей четвертому варианту воплощения изобретения, также используется для хранения собственного кода (90) уже параметризованного алгоритма серворегулирования электромеханического исполнительного механизма (25).
Перед использованием электромеханического исполнительного механизма (25), например, при запуске управляющего блока (22) и электромеханического исполнительного механизма (25), средства (52) обработки данных, входящие в состав управляющего блока (22), соответственно, получают в энергонезависимой памяти собственный код (90) алгоритма серворегулирования (передача (Т7) данных на фиг. 9).
Таким образом, проектирование управляющего блока (22) не требует предварительного определения алгоритма серворегулирования.
Здесь следует отметить, что в энергонезависимой памяти (60) может храниться собственный код любого типа алгоритма, а не только собственный код алгоритма серворегулирования, (например, [может храниться] собственный код алгоритма обнаружения неисправности и/или алгоритма следования тренду и/или алгоритма подсчета циклов).
Полезно, и безотносительно варианта воплощения исполнительной системы, раскрытой выше, чтобы энергонезависимая память (60) электромеханического исполнительного механизма (25) могла быть использована для хранения данных о конфигурации, содержащих калибровочные данные электромеханического исполнительного механизма (25). Калибровочные данные могут быть использованы управляющим блоком (22) для того, чтобы корректировать одно или более задаваемое значение (задаваемых значений) циклов серворегулирования или цифровые сигналы измерения. Калибровочные данные представляют собой, например, данные, делающие возможной градиентную коррекцию, коррекцию по отклонению или коррекцию в соответствии с параметрами, измеренными датчиками электромеханического исполнительного механизма.
Хранение калибровочных данных в энергонезависимой памяти (60) электромеханического исполнительного механизма (25) позволяет упростить разработку электромеханического исполнительного механизма (25) во время его проектирования и изготовления, и, таким образом, уменьшить затраты на конструирование и производство электромеханического исполнительного механизма (25). Помимо этого, при калибровке электромеханического исполнительного механизма (25) с использованием калибровочных данных рабочие характеристики системы улучшаются.
Безотносительно варианта воплощения исполнительной системы, описанной выше, энергонезависимая память (60) может содержать данные, предоставленные управляющим блоком (22), что полезно. Энергонезависимая память (60) в таком случае является, для управляющего блока (22), доступной для чтения и/или доступной для записи. Сохраняемые данные передаются между электромеханическим исполнительным механизмом (25) и управляющим блоком (22) по каналу (50) передачи, безотносительно направления передачи.
Данные, предоставляемые управляющим блоком (22) здесь содержат информацию об использовании электромеханического исполнительного механизма (25), которая выведена из других данных, хранящихся в энергонезависимой памяти (60) электромеханического исполнительного механизма (25), или которая получена, когда управляющий блок (22) исполняет какой - либо алгоритм.
Хранение информации об использовании, относящейся к электромеханическому исполнительному механизму (25), в его энергонезависимой памяти (60) облегчает будущие операции технического обслуживания. Оператор технического обслуживания будет иметь доступ к информации об использовании электромеханического исполнительного механизма (25) без необходимости конфигурировать управляющий блок (22) или электромеханический исполнительный механизм (25) в соответствии со специальной конфигурацией технического обслуживания. В дополнение к этому, облегчаются будущие ремонтные операции. Оператор ремонта будет иметь доступ к информации об использовании электромеханического исполнительного механизма (25) без необходимости передавать данные из управляющего блока (22).
Безотносительно варианта воплощения исполнительной системы, описанной выше, энергонезависимая память (60) может содержать другую информацию, используемую алгоритмом серворегулирования, для мониторинга, технического обслуживания, производства и поставки электромеханического исполнительного механизма (25), что полезно. Среди такой информации, можно сослаться на регистрационный или порядковый номер электромеханического исполнительного механизма (25).
Такая информация может, в частности, быть использована на стадии инициализации электромеханического исполнительного механизма (25).
Безотносительно варианта воплощения исполнительной системы, описанной выше, полезно, чтобы сохраняемые данные (61) в энергонезависимой памяти (60) были защищены некоторым контрольным инструментальным средством типа контроля циклическим избыточным кодом, который обеспечивает целостность сохраняемых данных (61) и обнаружение повреждения таких сохраняемых данных.
Безотносительно варианта воплощения исполнительной системы, раскрытой выше, полезно, чтобы канал (50) передачи состоял из быстрого канала и медленного канала.
Цифровые данные, которые требуют быстрой передачи (как передача данных в реальном масштабе времени) направляются по быстрому каналу. Это чаще всего относится к цифровым управляющим сигналам и цифровым сигналам измерения, используемым в циклах серворегулирования.
Цифровые данные, которые не требуют быстрой передачи, направляются по медленному каналу. Это чаще всего относится к сохраняемым данным (61) из энергонезависимой памяти (60) при записи или считывания таких сохраняемых данных (61).
Сохраняемые данные (61) могут, кроме того, быть доступными для чтения и/или доступными для записи беспроводным опрашивающим устройством, использующим технологию RFID-типа. Такой беспроводный доступ особенно интересен при выполнении, в отношении электромеханического исполнительного механизма (25), операций технического обслуживания.
Полезно, чтобы модуль связи и/или модуль энергоснабжения были интегрированы в одну и ту же специализированную интегральную схему, которая может быть разработана для нескольких типов электромеханических исполнительных механизмов, что уменьшает так называемые «неповторяющиеся» затраты на разработку таких электромеханических исполнительных механизмов.
Конечно же, изобретение не ограничено конкретными вариантами своего воплощения, описанными выше, но, напротив, охватывает любое альтернативное решение в рамках объема изобретения, который определен в формуле изобретения.
Хотя было упомянуто, что внешний датчик представляет собой датчик тормозного момента, расположенный на тормозе, можно рассмотреть установку одного или более другого внешнего датчика (других внешних датчиков), например, датчика температуры пакета дисков (обычно, термопары), или датчика давления в шине колеса, или еще тахометра.
Хотя исполнительная система, соответствующая изобретению, была описана в рамках архитектуры тормозной системы, исполнительная система, соответствующая изобретению, может быть интегрирована в архитектуру другого типа системы: двигательной установки, системы средств управления полетом, системы шасси, системы управления реверсором тяги, системы управления элементами крыла и так далее.
Хотя раскрытый здесь электромеханический исполнительный механизм имеет конкретную архитектуру, последняя может, конечно же, быть другой. Изобретение может, например, быть применено к исполнительной системе, содержащей электромеханический исполнительный механизм, имеющий два различных дублирующих друг друга канала, при этом каждый канал имеет свой собственный модуль связи, свой собственный модуль энергоснабжения и, если необходимо, свой собственный двигатель и свой собственный исполнительный элемент. Каждый канал также связан с различными данными о конфигурации, для того, чтобы осуществлять различные алгоритмы серворегулирования.
Раскрытый здесь канал передачи цифровой информации является относительно сложным, вследствие группового расположения электромеханических исполнительных механизмов. Изобретение может, конечно же, быть применено к исполнительной системе, содержащей другой канал передачи цифровой информации, такой как простая цифровая шина.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2014 |
|
RU2550408C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| ТОРМОЗНАЯ СИСТЕМА С ИНТЕЛЛЕКТУАЛЬНЫМ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ ДЛЯ ТОРМОЖЕНИЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2551298C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| Централизованное интеллектуальное электронное устройство системы автоматизированной электрической подстанции | 2019 |
|
RU2720318C1 |
| РОБОТИЗИРОВАННАЯ ПЛАВАЮЩАЯ МАШИНА | 2018 |
|
RU2714551C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА | 2009 |
|
RU2417937C1 |
| КОМПЛЕКС ПРОГРАММНО-АППАРАТНЫХ СРЕДСТВ АВТОМАТИЗАЦИИ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 2004 |
|
RU2279117C2 |
| ОБНАРУЖЕНИЕ И АНАЛИЗ ЗЛОУМЫШЛЕННОЙ АТАКИ | 2011 |
|
RU2583703C2 |
Исполнительная система для самолета, содержащая электромеханический исполнительный механизм (25), содержащий энергонезависимую память (60), в которой хранятся сохраняемые данные (61), включающие в себя данные (62) о конфигурации, относящиеся к указанному электромеханическому исполнительному механизму; управляющий блок (22), использующий указанные данные о конфигурации, для того чтобы реализовать цикл серворегулирования, при этом выходной сигнал представляет собой цифровой сигнал, управляющий электродвигателем указанного электромеханического исполнительного механизма; по меньшей мере один канал (50) передачи цифровой информации соединяет управляющий блок и электромеханический исполнительный механизм. Снижается сложность электрической исполнительной системы. 16 з.п. ф-лы, 9 ил.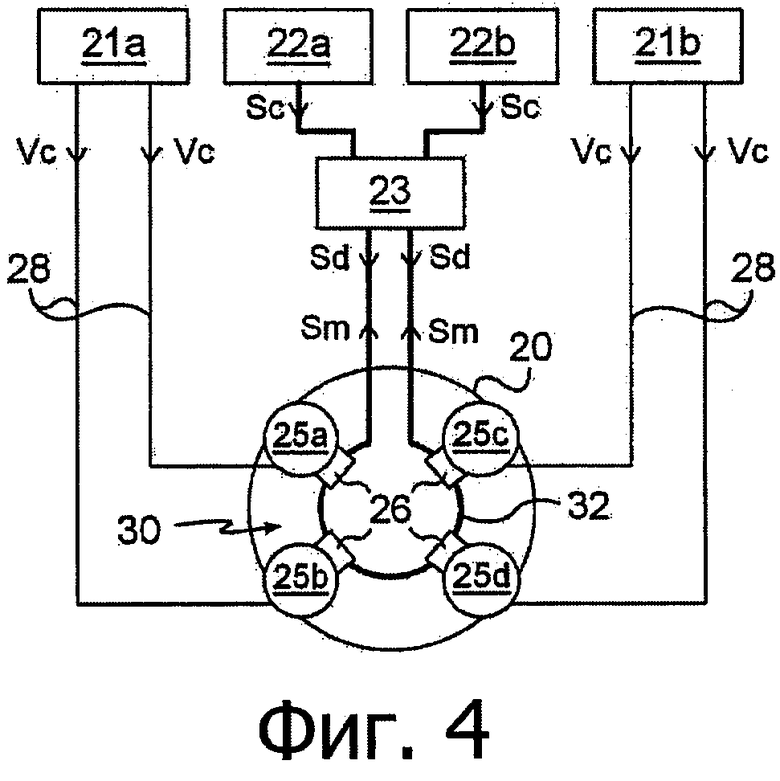
1. Исполнительная система для самолета, содержащая
электромеханический исполнительный механизм (25), содержащий электродвигатель (55), модуль (54) энергоснабжения, предназначенный для генерирования электрического тока, подаваемого на электродвигатель; измерительное средство (59), приспособленное для измерения серворегулируемой величины в электромеханическом исполнительном механизме и для генерирования цифрового сигнала измерения, представляющего указанную серворегулируемую величину; и энергонезависимую память (60), в которой хранятся сохраняемые данные (61), включающие в себя данные (62) конфигурации, относящиеся к указанному электромеханическому исполнительному механизму;
управляющий блок (22), предназначенный для исполнения алгоритма серворегулирования посредством получения и использования данных конфигурации, с тем чтобы приспособить алгоритм серворегулирования к указанному электромеханическому исполнительному механизму, при этом алгоритм серворегулирования реализует цикл серворегулирования, сигнал обратной связи которого представляет собой цифровой сигнал измерения, а выходной сигнал которого представляет собой цифровой сигнал, управляющий электродвигателем электромеханического исполнительного механизма, предназначенный для модуля энергоснабжения;
по меньшей мере один канал (50) передачи цифровой информации, соединяющий управляющий блок и электромеханический исполнительный механизм и позволяющий направлять указанные цифровой сигнал измерения, сохраняемые данные и цифровой управляющий сигнал.
2. Система по п. 1, в которой данные конфигурации содержат параметры (63) алгоритма серворегулирования.
3. Система по п. 2, в которой указанные параметры (63) содержат пропорциональный коэффициент, и/или интегральный коэффициент, и/или производный коэффициент цикла серворегулирования, и/или ограничение по положению, и/или ограничение по скорости, и/или ограничение по мощности электромеханического исполнительного механизма.
4. Система по п. 1, в которой данные (62) конфигурации содержат параметры (63) другого алгоритма.
5. Система по п. 4, в которой указанный другой алгоритм содержит алгоритм обнаружения неисправности, и/или алгоритм следования тренду, и/или алгоритм подсчета циклов.
6. Система по п. 1, в которой данные (62) конфигурации содержат идентификатор (80), позволяющий управляющему блоку выбрать алгоритм серворегулирования, подлежащий использованию, из списка алгоритмов серворегулирования, хранящихся в управляющем блоке.
7. Система по п. 1, в которой данные конфигурации содержат собственный код алгоритма серворегулирования.
8. Система по п. 1, в которой данные конфигурации содержат калибровочные данные электромеханического исполнительного механизма (25).
9. Система по п. 8, в которой калибровочные данные содержат собственный код алгоритма калибровки.
10. Система по п. 9, в которой алгоритм калибровки представляет собой градиентную коррекцию, и/или коррекцию по отклонению, и/или коррекцию в соответствии с параметром, измеренным в электромеханическом исполнительном механизме, таким как температура.
11. Система по п. 1, в которой сохраняемые данные дополнительно содержат данные, переданные управляющим блоком.
12. Система по п. 11, в которой данные, переданные управляющим блоком, содержат информацию об использовании электромеханического исполнительного механизма.
13. Система по п. 1, в которой сохраняемые данные защищены контрольным инструментальным средством типа контроля циклическим избыточным кодом.
14. Система по п. 1, в которой электромеханический исполнительный механизм содержит два дублирующих канала, с которыми связаны различные данные конфигурации для реализации различных алгоритмов серворегулирования.
15. Система по п. 1, в которой управляющий блок и электромеханический исполнительный механизм соединены двумя каналами передачи цифровой информации.
16. Система по п. 15, в которой указанные каналы передачи цифровой информации содержат быстрый канал, предназначенный для обмена цифровым сигналом измерения и цифровым управляющим сигналом, и медленный канал, предназначенный для передачи сохраняемых данных.
17. Система по п. 1, в которой некоторые из сохраняемых данных являются доступными для чтения и/или доступными для записи беспроводным опрашивающим устройством, использующим технологию RFID-типа.
| US 20130335242 A1, 19.12.2013 | |||
| US 20050093501 A1, 05.05.2005 | |||
| US 5248922 A, 28.09.1993 | |||
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД С ТОРМОЗНЫМ УСТРОЙСТВОМ | 1992 |
|
RU2066873C1 |

