Изобретение относится к устройствам управления электроприводами грузоподъемных механизмов повышенной опасности, в частности к устройствам управления электроприводами подъемного крана.
Известно выбранное в качестве ближайшего аналога устройство управления электроприводами грузоподъемного механизма, в частности башенного крана RU 2286305 С1, 2005.04.18.
Устройство содержит управляющий блок, блок управления электроприводами, блок определения условий работы и состояния крана, блок преобразования аналоговых и цифровых сигналов и блок контроля состояния электроприводов. Управляющий блок соединен первым двухсторонним каналом связи с блоком преобразования, вторым двухсторонним каналом связи - с блоком определения условий работы и состояния крана. Блок управления электроприводами соединен с блоком контроля состояния электроприводов и блоком преобразования, а последний в свою очередь соединен с блоком контроля состояния электроприводов.
Управляющий блок включает в себя первый, второй и третий микроконтроллеры, блок настройки параметров средств дешифрации и шифрации, командоконтроллеры, органы управления и средства сигнализации и индикации. Первый, второй и третий микроконтроллеры соединены первыми входами между собой и с первым каналом двухсторонней связи, вторым двухсторонним каналом связи через второй вход третьего микроконтроллера управляющий блок соединен с блоком определения условий работы, первым двухсторонним каналом связи управляющий блок соединен со средствами дешифрации и шифрации. Блок настройки параметров средств дешифрации и шифрации соединен с первым каналом двухсторонней связи, при этом между собой первой связью соединены командоконтроллеры механизма подъема груза и механизма передвижения крана и соответствующие им органы управления, с первой связью через второй вход соединен первый микроконтроллер, второй связью соединены органы управления (и командоконтроллеры механизма перемещения грузовой тележки и механизма поворота крана, второй микроконтроллер соединен вторым входом со второй связью, блок контроля состояния электроприводов соединен с электроприводами и средствами дешифрации и шифрации.
Блок определения условий работы и состояния крана включает в себя блок регистрации и отображения параметров крана, соединенный с датчиками таких параметров, как усилие в канате механизма подъема, перемещение грузовой тележки, высота подъема груза, угол поворота стрелы, скорость ветра, температура, перемещение крана. Блок преобразования аналоговых и цифровых сигналов включает в себя средства шифрации и дешифрации. Блок управления электроприводами содержит устройства управления электроприводами (электроприводы в терминологии заявки ближайшего аналога). Блок контроля состояния приводов содержит датчики состояния привода механизма перемещения грузовой тележки крана, состояния привода механизма подъема груза, состояния привода механизма поворота, состояния привода механизма перемещения крана, состояния линейного контактора и датчик состояния двигателя.
Вышеописанное устройство управления электроприводами обладает следующими недостатками.
Во-первых, устройство имеет ограниченную область применения, оно может эффективно использоваться только для одного или серии однотипных грузоподъемных механизмов, что снижает технологичность изготовления, повышает стоимость разработки подобных устройств управления для кранов различной конструкции, а также значительно усложняет обслуживание большого парка различных грузоподъемных механизмов.
Во-вторых, устройство управления электроприводами подъемного крана обладает низкой надежностью и отказоустойчивостью, поскольку отказ одного из блоков устройства управления может привести к нарушению функционирования или полной остановке всего грузоподъемного механизма, так, например, отказ блока управления электроприводами или блока контроля состояния приводов приводит к остановке всего грузоподъемного механизма. Отсутствие резервирования блоков и каналов связи также отрицательно сказывается на надежности работы устройства.
В-третьих, ограничены функциональные возможности устройства управления электроприводами подъемного крана, что снижает безопасность его эксплуатации.
Ограничение области применения и функциональных возможностей устройства, низкая технологичность изготовления, сложность разработки и обслуживания (а значит, их высокая стоимость), а также низкая надежность и безопасность работы подъемного механизма обусловлены следующими конструктивными особенностями устройства управления электроприводами подъемного крана.
Конструкция блоков, входящих в состав устройства, не согласована со структурой грузоподъемного механизма, что не позволяет сделать блоки автономными, унифицированными и отвечающими за управление соответствующим механизмом или функциями грузоподъемного механизма. Такой подход не позволяет достаточно просто конфигурировать устройство управления под конкретный грузоподъемный механизм, так как добавление нового блока требует больших схемотехнических и программных изменений, необходимых для интеграции блока в систему, кроме того, снижается отказоустойчивость устройства в целом, например, отказ блока управления электроприводами или блока контроля состояния приводов может привести к остановке всего грузоподъемного механизма.
Использование в устройстве управления электроприводами подъемного крана нескольких несвязанных между собой разнородных цифровых каналов связи усложняет устройство, усложняется его настройка, поиск неисправностей, а также обмен информацией между блоками устройства.
Сложная структура управляющего блока, включающего как микроконтроллеры, так и органы управления и сигнализации состояния крана, не позволяет отделить микроконтроллер от органов управления грузоподъемным механизмом, что ограничивает возможности устройства управления, например при использовании дополнительного пульта радиоуправления краном.
Сложная структура блока управления электроприводами и блока контроля состояния приводов не позволяет применить для повышения надежности и функциональности устройства автономные блоки управления механизмами, каждый из которых управляет одним механизмом крана.
В устройстве не предусмотрен автономный блок ввода и распределения напряжения питания в виде единого законченного устройства, содержащего главный контактор крана, устройства преобразования и распределения напряжения питания по блокам управляющего устройства, цепи нулевой защиты, устройства контроля качества напряжения, учета электроэнергии, контроля качества изоляции, защиты электрооборудования и кабельной проводки крана, что не позволяет использовать устройство управления электроприводами для кранов различных конструкций, а также диагностировать качество напряжения питающей сети, осуществлять защиту электрооборудования крана от скачков и просадок напряжения питания.
Кроме того, в устройстве не предусмотрены средства радиосвязи с диспетчерским пунктом, что не позволяет производить удаленную диагностику и настройку оборудования крана, извещать обслуживающий персонал об аварийных ситуация, считывать архивы событий, накопленные в процессе эксплуатации крана.
Изобретение направлено на решение задачи расширения области применения и функциональных возможностей устройства, повышения технологичности его изготовления, упрощения разработки и обслуживания устройства, а значит, снижения себестоимости, а также на решение задачи повышения надежности и безопасности работы грузоподъемного механизма.
Сущность изобретения заключается в том, что в устройстве управления электроприводами грузоподъемного механизма, содержащем подключенные к напряжению питания управляющий блок, средства шифрации и дешифрации аналоговых и цифровых сигналов, командоконтроллеры и органы управления грузоподъемным механизмом, средства сигнализации и индикации, блок индикации информации о состоянии грузоподъемного механизма, устройства управления электроприводами, датчики состояния и исполнительные устройства, блок определения условий работы, средство связи, предлагается все блоки, входящие в состав устройства, выполнить в виде унифицированных, автономных блоков, каждый из которых отвечает за управление соответствующим механизмом или функциями грузоподъемного механизма; средство связи выполнить в виде единого прозрачного для всех блоков двухстороннего канала связи, к которому подключены все блоки устройства; управляющий блок выполнить на базе подключенного к единому каналу связи единого управляющего микроконтроллера, программное обеспечение которого имеет модульную структуру, соответствующую механизмам и функциям грузоподъемного механизма; при этом предлагается ввести в устройство блоки управления механизмами, которые выполнены автономными и каждый включает в себя подключенные к единому каналу связи устройство управления электроприводом и блок шифраторов и дешифраторов, к которому подключены датчики состояния и исполнительные устройства механизмов; предлагается ввести в устройство один или несколько блоков взаимодействия с оператором, которые выполнены автономными и каждый включает в себя блок шифраторов и дешифраторов, к которому подключены органы управления и индикации, а также ввести один или несколько блоков ввода и распределения напряжения питания, которые выполнены автономными и каждый включает в себя подключенный к единому каналу блок шифраторов и дешифраторов, к которому подключены средства ввода и распределения напряжения питания.
Дополнительно устройство управления электроприводами грузоподъемного механизма может содержать блок диагностики, настройки и управления режимами работы грузоподъемного механизма, который выполнен в виде программатора с возможностью подключения к каналу связи.
Устройство управления электроприводами грузоподъемного механизма может также содержать блок радиосвязи с диспетчерским пунктом, который подключается к единому каналу связи и представляет собой радиопередающее устройство для передачи данных.
По меньшей мере один из блоков взаимодействия с оператором может включать в себя подключенное к единому каналу связи устройство текстовой индикации состояния грузоподъемного механизма.
Часть блоков устройства или все блоки устройства могут быть резервированы. Единый канал связи устройства также может быть резервирован.
Все блоки устройства могут быть выполнены в виде отдельных конструктивных модулей с возможностью их размещения как на грузоподъемном механизме, так и вне его.
Заявляемое устройство управления электроприводами грузоподъемного механизма, в отличие от известных, обладает следующими преимуществами.
За счет модульного принципа построения устройства управления обеспечивается возможность разработки набора стандартных управляющих блоков, оснащенных предварительно настроенным и отлаженным стандартным программным обеспечением для грузоподъемного механизма требуемого назначения и конфигурации (заданного числа механизмов, входящих в состав требуемого грузоподъемного механизма).
За счет выполнения средств связи в виде единого двухстороннего прозрачного канала связи обеспечивается расширение области применения и функциональных возможностей устройства. При необходимости обеспечивается резервированный информационный обмен между блоками устройства управления. При этом в качестве среды передачи сигналов могут использоваться проводные устройства, основанные на оптическом и электрическом принципе действия, а также беспроводные оптические или радиоканалы с различными протоколами связи. Преимуществами такого канала связи по сравнению с известным аналогом являются упрощение работы, обслуживания, настройки, а также расширение функциональных возможностей устройства управления.
Выполнение управляющего блока на основе единого управляющего контроллера, программное обеспечение которого имеет модульную структуру, полностью соответствующую структурной схеме грузоподъемного механизма, позволяет расширить область применения и функциональные возможности устройства. Процесс разработки программного обеспечения упрощается и представляет собой настройку основных технологических параметров работы механизмов крана в рамках общего алгоритма. Управляющий блок независим от остальных, специфических для кранов устройства управления (командоконтроллеры, органы управления и т.п.).
Введение в устройство автономных блоков взаимодействия с оператором, отдельных от управляющего блока, каждый из которых передает команды оператора в управляющий блок и отображает состояние механизмов, также позволяет расширить область применения и функциональные возможности устройства. Блок взаимодействия с оператором может включать в себя устройства сигнализации и индикации информации о состоянии грузоподъемного механизма, что значительно упрощает процесс диагностики и управления системой в целом. Устройство может быть снабжено несколькими блоками взаимодействия с оператором, устанавливаемыми в кабине крана и/или на производственной площадке. Также устройство может быть оснащено блоком взаимодействия с оператором посредством радиоканала.
Введение в устройство блоков управления механизмом, каждый из которых выполнен в виде единого законченного устройства, позволяет легко интегрировать их в устройство управления и подключать при помощи единого канала связи. К блоку подключаются датчики и исполнительные устройства механизма. При помощи датчиков, приборов и устройств безопасности механизма, подключаемых к блоку управления механизмом, анализируется режим работы механизма и ведется контроль состояния устройств крана. Преимуществами применения автономных блоков управления механизмами является повышение надежности и увеличение функциональности, простая интеграция в существующее или создаваемое устройство управления, универсальность для кранов различных конструкций, возможность резервирования блока управления электроприводом, возможность совместной работы блоков на один механизм крана, возможность поочередной работы блока на два механизма крана, возможность управления одним блоком несколькими электродвигателями одного механизма.
Введение в устройство блоков ввода и распределения напряжения питания, каждый из которых выполнен в виде единого законченного блока, который легко интегрируется в устройство управления и подключается к нему при помощи единого канала связи. Блок ввода и распределения напряжения питания содержит главный контактор крана, устройства преобразования и распределения напряжения питания по блокам управляющего устройства, цепи нулевой защиты, устройства контроля качества напряжения, учета электроэнергии, контроля качества изоляции, защиты электрооборудования и кабельной проводки крана. Преимуществом применения автономных блоков ввода и распределения питающего напряжения являются простая интеграция в существующее или создаваемое устройство управления, универсальность для кранов различных конструкций, возможность резервирования блоков ввода и распределения напряжения, диагностирование качества питающего напряжения, защита электрооборудования крана от скачков и просадок напряжения сети.
Введение в устройство блока радиосвязи с диспетчерским пунктом позволяет производить удаленную диагностику и настройку оборудования крана, извещать обслуживающий персонал об аварийных ситуация, считывать архивы событий, накопленные в процессе эксплуатации крана.
Введение в устройство блока диагностики, настройки и управления режимами работы крана, выполненного в виде программатора, подключенного к каналу связи, позволяет оперативно проводить диагностику и настройку режимов работы устройства управления грузоподъемным механизмом.
Выполнение устройства с резервированием части или всех блоков устройства управления позволяет повысить надежность и безопасность работы устройства.
Выполнение устройства с резервированным каналом связи позволяет повысить надежность и безопасность работы устройства.
Выполнение устройства в виде отдельных конструктивных модулей с возможностью их размещения как на грузоподъемном механизме, так и вне его, позволяет свободно компоновать шкафы устройства управления в зависимости от наличия свободного места как на настилах крана, так и на производственной площадке.
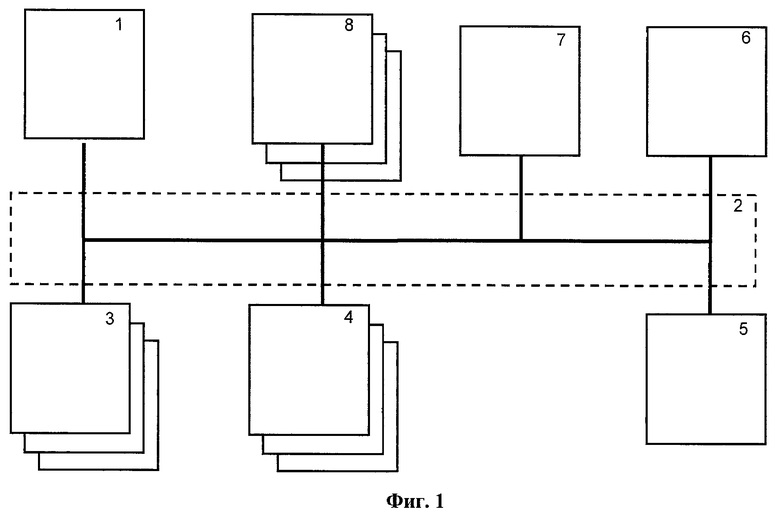
На фигуре 1 приведена блок-схема предлагаемого устройства управления электроприводами грузоподъемного механизма. На фигуре 2 приведена структурная схема предлагаемого устройства управления электроприводами грузоподъемного механизма.
Устройство управления электроприводами грузоподъемного механизма, блок-схема которого приведена на фиг.1, представляет собой систему управления краном и содержит управляющий блок 1, подключенный к единому каналу 2 связи, к которому также подключены блоки 3 управления механизмами, блоки 4 ввода и распределения напряжения питания, блок 5 определения условий работы, блок 6 диагностики, настройки и управления режимами работы грузоподъемного механизма, блок 7 радиосвязи с диспетчерским пунктом, блок 8 взаимодействия с оператором.
Все блоки, входящие в состав устройства, выполнены в виде унифицированных, автономных блоков, каждый из которых отвечает за управление соответствующим механизмом крана или функциями крана.
Управляющий блок 1 выполнен на базе подключенного к единому каналу 2 связи единого управляющего микроконтроллера 9, например, семейства SIMATIC с модульным программным обеспечением, который объединен стандартной шиной ввода вывода с блоками 10, 11 шифраторов и дешифраторов аналоговых и цифровых сигналов. Микроконтроллер 9 оборудован портом для подключения к единому каналу связи 2.
Блок 8 взаимодействия с оператором содержит подключенные к каналу 2 связи блок 12 шифраторов и дешифраторов и блок 13 текстовой индикации состояния грузоподъемного механизма для информирования оператора и наладочного персонала. К блоку 12 подключены дискретные или аналоговые командоконтроллеры 14, органы 15 управления краном: кнопки включения/выключения, ключ-марка, кнопка аварийного останова, переключатели режимов работы, кнопка сброса защиты, подачи звукового сигнала и т.д.; средства 16, 17 сигнализации состояния механизмов и режимов работы крана, средства 18 звуковой сигнализации. Блок 13 предназначен для индикации информации о состоянии крана для оператора и наладочного персонала. Блок 13 позволяет настраивать параметры работы крана, осуществляет отображение информации о текущих отказах, а также содержит журнал отказов, отображает вспомогательную информацию для оператора. Число блоков взаимодействия с оператором определяется требованиями к системе управления краном.
Канал связи 2 представляет собой сложную гетерогенную сеть устройств, обеспечивающих при необходимости резервированный информационный обмен между всеми блоками устройства управления. В качестве среды передачи сигналов используются проводные устройства, основанные на оптическом и электрическом принципе действия, а также беспроводные оптические или радиоканалы с различными протоколами связи. Для блоков устройства управления канал связи является прозрачным и представляет собой единую информационную среду, охватывающую все блоки устройства. В качестве канала связи может быть использована, например, сеть PROFIBUS.
Блоки 3 управления механизмами выполнены автономными и каждый включает в себя подключенные к единому каналу 2 связи устройство 20 управления электроприводом и блок 19 шифраторов и дешифраторов, к которому подключены датчики 21 состояния и исполнительные устройства 22 механизмов. Один или несколько двигателей 24 механизма подключаются к устройству 20 управления электроприводом. Также к устройству 20 могут быть подключены датчики состояния и ротационное кодирующее устройство 23 двигателя 24. Число блоков управления механизмами крана определяется числом механизмов крана, а также требованиями к резервированию блоков крана. Устройство 20 управления электроприводом представляет собой частотный или тиристорный преобразователь напряжения.
Блоки 4 ввода и распределения напряжения питания выполнены автономными и каждый включает в себя подключенный к единому каналу 2 блок 25 шифраторов и дешифраторов, к которому подключены средства 26, 27 ввода и распределения напряжения питания, включающие главный контактор крана, устройства преобразования и распределения напряжения питания по блокам управляющего устройства, цепи нулевой защиты, устройства контроля качества напряжения, учета электроэнергии, контроля качества изоляции, защиты электрооборудования и кабельной проводки крана. Напряжение питания от блока 4 поступает на все блоки устройства (электрические связи не показаны). Число блоков 4 определяется требованиями к резервированию блоков крана, а также схемой размещением блоков устройства управления на кране.
Блок 5 определения условий работы содержит подключенный к единому каналу 2 связи блок 28 шифраторов и дешифраторов, к которому подключены датчики 29 температуры внутри устройства управления, температуры окружающей среды, влажности, скорости ветра, а также подключены исполнительные устройства 30.
Блок 6 диагностики выполнен в виде программатора и предназначен для настройки и управления режимами работы крана и может быть подключен к каналу 2 связи и предназначен для диагностики электрооборудования, наладки и сбора данных о состоянии устройства управления, регистрации параметров работы механизмов грузоподъемного механизма (крана).
Блок 7 радиосвязи с диспетчерским пунктом представляет собой радиомодем и предназначен для связи с рабочим местом обслуживающего персонала, что позволяет своевременно получать информацию об отказах или отклонениях в работе устройства, вносить необходимые корректировки в программное обеспечение крана и настройки устройств, подключенных к каналу связи 2.
Устройство работает следующим образом.
Устройство включается после подачи напряжения питания с помощью рубильника (не показан). После подачи электрического питания на блоки 4 ввода и распределения напряжения питания происходит инициализация всех блоков устройства управления. Устройство управления переходит в режим самодиагностики. При этом микроконтроллер 9 производит загрузку из ПЗУ в ОЗУ и запуск управляющего программного обеспечения. Микроконтроллером производится параметрирование следующих устройств: 10, 11, 19, 12, 25, 28, 20. Микроконтроллер переходит в режим циклического обмена с устройствами, подключенными к единому каналу связи 2. Инициализируется и запускается блок 7 радиосвязи с диспетчерским пунктом. Микроконтроллер анализирует диагностическую информацию, поступившую от блоков системы по завершении запуска. При наличии отказов блоков устройства управления микроконтроллером формируются соответствующие сообщения на экране блока 13 индикации информации. Микроконтроллер начинает циклический опрос органов управления краном 14-17; блоков управления ротационными кодирующими устройствами 23; всех блоков шифрации и дешифрации цифровых и аналоговых сигналов: механизмов крана 19, блоков ввода и распределения напряжения питания 25, блока определения условий работы 28, устройств управления электроприводами 20. Запускается процесс обмена диагностической информацией с блоком 13 индикации информации о состоянии электрооборудования крана, при необходимости формируются аварийные и предупредительные сообщения. При успешном прохождении процедуры тестирования микроконтроллер разблокирует устройство управления, на экране блока 13 индикации информации формируется сообщение о готовности устройства к работе.
Включение крана производится следующим образом. При повороте ключа-марки сигнал состояния ключа-марки поступает на вход блока шифрации команд и по каналу связи 2 передается микроконтроллеру 9. Микроконтроллер выдает на выход блока 12 шифраторов и дешифраторов сигнал для тестирования звуковой и световой сигнализации 14-17, установленной на пульте управления краном, выполняет анализ состояния устройств безопасности, включенных в цепь нулевой защиты крана. В случае отсутствия сигнала о готовности нулевой цепи на блоке 13 индикации формируется соответствующее сообщение оператору, включение устройства управления краном блокируется. При наличии разрешающих сигналов с приборов и устройств безопасности контроллер 9 разблокирует систему управления. При нажатии кнопки «Включить», сигнал поступает на блок 12 шифраторов и дешифраторов, откуда по цифровому каналу связи передается микроконтроллеру 9. При наличии блокировок, запрещающих работу крана таких, как разблокировка одного из проходов крана, открыта входная дверь в кабину управления; недопустимые условия эксплуатации крана: повышенная или пониженная температура в кабине электрооборудования или оператора, повышенная влажность, недопустимый уровень питающего напряжения; недопустимое состояние органов управления (один или несколько командоконтроллеров отклонено от нулевого положения); работа крана блокирована кнопкой аварийного отключения - включение главного контактора блокируется, на экране блока 13 индикации информации о состоянии крана отображается соответствующее сообщение. При отсутствии указанных блокировок микроконтроллер 9 формирует на дешифраторе сигнал включения главного контактора, по истечении времени включения контроллер 9 анализирует сигнал состояния контактора, поступающий на шифратор дискретного сигнала. При отсутствии подтверждения о включении главного контактора сигнал включения контактора снимается, на блоке 13 по команде контроллера 9 формируется соответствующее аварийное сообщение. При включении главного контактора 26 напряжение питания поступает на силовые цепи системы управления краном, в т.ч. устройства 20 управления электроприводами. По завершении процедуры включения устройств управления 20 электроприводами, микроконтроллер 9 снимает блокировку с блоков 3 управления механизмами, а управляющий блок 1 переходит в состояние ожидания команд от оператора.
Работа механизмов крана производится следующим образом.
При отклонении ручки командоконтроллера 14 одного или нескольких механизмов крана набор сигналов соответствующих направлению и углу отклонения ручки поступает на блок 12 шифраторов и дешифраторов, затем передается на микроконтроллер 9. Микроконтроллер 9 анализирует сигналы, поступившие от командоконтроллера 14, проверяет исправность соответствующего механизма, а также направление движения и требуемую величину скорости для выбранного механизма. При отсутствии блокировок на работу механизма со стороны приборов и устройств безопасности крана, технологических блокировок, поступающих с блока 19 шифрации и дешифрации механизма крана, а также при исправности устройств блока 3 управления механизмом микроконтроллер 9 передает по каналу 2 связи команду управления направлением и скоростью движения механизма. Эта команда при поступлении на устройство 20 управления электроприводом включает его. Устройство 20 управления электроприводом подает напряжение на двигатель 24 соответствующего механизма. По измеренным значениям напряжения и тока двигателя 24 осуществляется контроль его состояния устройством 20. При отказе двигателя 24 устройство 20 формирует сигнал защиты, который передается микроконтроллеру 9 по каналу связи 2. Микроконтроллер 9 формирует соответствующее сообщение, отображаемое на экране блока 13, блок 3 управления механизмом блокируется. В исправном состоянии механизма при достижении требуемого момента на валу двигателя 24 устройством 20 управления электроприводом формируется сигнал снятия электромеханического тормоза. Сигнал поступает на цифровой канал устройства дешифрации 19, и в купе с сигналом разрешения снятия тормоза от микроконтроллера 9, поступающего с блока 10 шифрации и дешифрации приводит к срабатыванию исполнительного устройства управления электромеханическим тормозом блока 22. К катушке тормоза прикладывается напряжение, необходимое для снятия тормоза. По истечении времени срабатывания тормоза микроконтроллер 9 начинает анализировать сигналы с контактов контактора и датчиков состояния тормоза, входящего в состав блока 22. Если тормоз не сработал вовремя, микроконтроллером 9 формируется соответствующее аварийное сообщение, отображаемое на экране блока 13, работа блока 3 управления механизмом блокируется. Устройство 20 управления двигателем начинает плавный разгон механизма до скорости, задаваемой командоконтроллером крана. Динамика движения механизма крана анализируется при помощи ротационного кодирующего устройства 23. Микроконтроллер 9, анализируя сигналы с соответствующих датчиков 21 блока 3, выявляет факты падения груза (движение груза со скоростью, значительно превышающей максимальную), проскальзывания груза, например, в случае плохо отрегулированного электромеханического тормоза, заклинивания в механизме крана. Во всех вышеприведенных случаях микроконтроллер 9 формирует команду, блокирующую работу блока 20 управления механизмом. На экране блока индикации 13 формируется соответствующее сообщение. При установке командоконтроллера 14 в нулевое положение устройство 20 управления двигателем 24 производит плавную остановку механизма. Когда скорость механизма падает до нуля - формируется сигнал наложения электромеханического тормоза. После зажатия (выключения) тормоза устройство управления 20 снимет напряжение с двигателя 24. Управляющий блок 1 переходит в состояние ожидания сигнала от командоконтроллера блока 8.
Регистрация параметров работы крана производится следующим образом.
Регистратор параметров (не показан) при необходимости располагается в блоке управления 1 и предназначен для хранения информации о состоянии технологических параметров крана, например количество запусков механизмов, моточасы механизмов, учета перегрузок механизмов подъема. Параллельно микроконтроллер ведет журнал аварийных отключений, регистрирует основные электрические параметры работы двигателей механизмов, что значительно упрощает процедуру поиска неисправностей. При возникновении аварийных ситуаций микроконтроллер блокирует работу отказавшего механизма и формирует аварийное сообщение на устройстве индикации.
Выключение крана производится при нажатии кнопки «Выключить» или выключении ключа-марки, или нажатии кнопки аварийного останова. При этом соответствующий сигнал поступает на вход блока 10 шифраторов и дешифраторов контроллера 9. Контроллер снимает сигнал включения главного контактора. По истечении заданного времени выполняется контроль состояния главного контактора. В случае, если сигнал об отключении главного контактора не поступил, на экране блока индикации 13 формируется соответствующее сообщение.
Таким образом, предлагаемое устройство управления электроприводами грузоподъемного механизма обладает широкими областью применения и функциональными возможностями, технологично в изготовления, удобно и просто в разработке и обслуживании, надежно и безопасно в работе.
Высокая степень унификации всех блоков устройства управления электроприводом грузоподъемных механизмов упрощает процесс их разработки, внедрения и обслуживания и повышает отказоустойчивость, так, например, отказ одного из блоков управления механизмами не приводит к остановке всего грузоподъемного механизма.
Повышается безопасность работы. Датчики и устройства, установленные на механизмах крана, позволяют своевременно определить и предотвратить развитие аварийных ситуаций. Например, по сигналу ротационного кодирующего устройства возможно определение фактов падения груза, определение факта износа тормозных колодок, заклинивания механизма крана. Датчик состояния электромеханического тормоза позволяет диагностировать состояние катушки тормоза, определять факт разжима тормоза, что позволяет значительно повысить ресурс работы колодок тормоза.
Упрощению устройства в целом и, в частности, процедуры настройки и диагностики устройства, способствует применение единого канала связи, что позволяет обеспечить обмен информацией между каждыми из блоков.
Расширению функциональных возможностей устройства управления способствует то, что функции, обычно выполняемые оператором, возлагаются на устройство управления, например позиционирование механизмов крана, устранение перекоса опор козловых кранов, гашение или демпфирование колебаний груза, координатная защита, функция грейферного автомата.
Заявленный технический результат достигается за счет адаптации архитектуры устройства управления к структуре грузоподъемного механизма. Предлагаемое устройство управления содержит автономные унифицированные блоки, каждый из которых отвечает за управление конкретным механизмом или функцией крана. Каждый блок является автономным, т.е. логически законченным устройством, и легко может быть встроен, например, в уже существующее устройство управления. Все блоки содержат стандартный интерфейс, при помощи которого они соединяются и образуют устройство управления. Интерфейс блока представляет собой, например: разъем для подключения блоков к каналу связи, клеммные модули для подключения входных и выходных сигналов, вводы питающего напряжения силовых и контрольных цепей. Широкие функциональные возможности устройства управления реализованы посредством централизованного управления работой механизмов, так, например, управление поддерживающей и замыкающей лебедками в режиме работы угольного или лесного грейфера, а также крюка сведено к управлению одним виртуальным механизмом грейфера или подъема. Аналогично осуществляется синхронное управление опорами большепролетных козловых кранов в функции регулирования перекоса опор, а также синхронная работа нескольких кранов как единого механизма при перегрузке крупногабаритных грузов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ БАШЕННОГО КРАНА | 2005 |
|
RU2286305C1 |
| Программно-технический комплекс контроля, управления и предиктивной диагностики технологического оборудования подъемно-транспортного механизма | 2021 |
|
RU2770052C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2309890C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МАШИНЫ | 2002 |
|
RU2234185C1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ С ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2381171C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ЭКСКАВАТОРА | 2001 |
|
RU2193630C1 |
| УСТРОЙСТВО ДЛЯ ВВОДА-ВЫВОДА ИНФОРМАЦИИ | 1992 |
|
RU2029352C1 |
Изобретение относится к устройствам управления электроприводами грузоподъемных механизмов повышенной опасности, в частности в устройствах управления электроприводами подъемного крана. Устройство управления электроприводами грузоподъемного механизма содержит управляющий блок, средства шифрации и дешифрации аналоговых и цифровых сигналов, командоконтроллеры и органы управления грузоподъемным механизмом, средства сигнализации и индикации, блок индикации информации о состоянии грузоподъемного крана, устройства управления электроприводами, датчики состояния и исполнительные устройства, блок определения условий работы, средство связи, блоки управления механизмами, блок взаимодействия с оператором. Все блоки, входящие в состав устройства, выполнены в виде унифицированных, автономных блоков, блок ввода и распределения напряжения питания. Блоки управления механизмами содержат устройство управления электроприводом и блок шифраторов и дешифраторов, к которому подключены датчики состояния и исполнительные устройства механизмов. Блок взаимодействия с оператором содержит блок индикации состояния грузоподъемного механизма и блок шифраторов и дешифраторов, к которому подключены командоконтроллеры, органы управления, средства сигнализации и индикации. Блок ввода и распределения напряжения питания содержит блок шифраторов и дешифраторов, к которому подключены средства ввода и распределения напряжения питания. Изобретение обеспечивает повышение надежности и безопасности работы грузоподъемного крана. 6 з.п. ф-лы, 2 ил.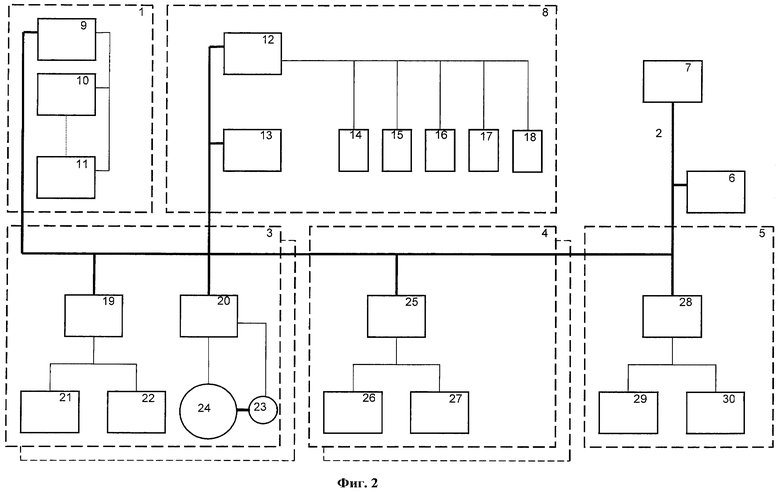
1. Устройство управления электроприводами грузоподъемного механизма, содержащее подключенные к напряжению питания управляющий блок, средства шифрации и дешифрации аналоговых и цифровых сигналов, командоконтроллеры и органы управления грузоподъемным механизмом, средства сигнализации и индикации, блок индикации информации о состоянии грузоподъемного крана, устройства управления электроприводами, датчики состояния и исполнительные устройства, блок определения условий работы, средство связи, отличающееся тем, что все блоки, входящие в состав устройства, выполнены в виде унифицированных, автономных блоков, каждый из которых отвечает за управление соответствующим механизмом или функциями грузоподъемного механизма, средство связи выполнено в виде единого, прозрачного для всех блоков двухстороннего канала связи, к которому подключены все блоки устройства, управляющий блок выполнен на базе подключенного к единому каналу связи единого управляющего микроконтроллера, программное обеспечение которого имеет модульную структуру, соответствующую механизмам и функциям грузоподъемного механизма, при этом в устройство введены блоки управления механизмами, которые выполнены автономными, и каждый включает в себя подключенные к единому каналу связи устройство управления электроприводом и блок шифраторов и дешифраторов, к которому подключены датчики состояния и исполнительные устройства механизмов, а также в устройство введены один или несколько блоков взаимодействия с оператором, которые выполнены автономными и каждый включает в себя подключенные к единому каналу связи блок индикации состояния грузоподъемного механизма и блок шифраторов и дешифраторов, к которому подключены командоконтроллеры, органы управления, средства сигнализации и индикации, и введены один или несколько блоков ввода и распределения напряжения питания, которые выполнены автономными, и каждый включает в себя подключенный к единому каналу блок шифраторов и дешифраторов, к которому подключены средства ввода и распределения напряжения питания.
2. Устройство управления электроприводами грузоподъемного механизма по п.1, отличающееся тем, что оно дополнительно содержит блок диагностики, настройки и управления режимами работы грузоподъемного механизма, который выполнен в виде программатора с возможностью подключения к каналу связи.
3. Устройство управления электроприводами грузоподъемного механизма по п.1, отличающееся тем, что оно дополнительно содержит блок радиосвязи с диспетчерским пунктом, который подключается к единому каналу связи и представляет собой радиопередающее устройство для передачи данных.
4. Устройство управления электроприводами грузоподъемного механизма по п.1, отличающееся тем, что, по меньшей мере, один из блоков взаимодействия с оператором включает в себя подключенное к единому каналу связи устройство текстовой индикации состояния грузоподъемного механизма.
5. Устройство управления электроприводами грузоподъемного механизма по п.1, отличающееся тем, что часть блоков устройства или все блоки устройства резервированы.
6. Устройство управления электроприводами грузоподъемного механизма по п.1, отличающееся тем, что единый канал связи резервирован.
7. Устройство управления электроприводами грузоподъемного механизма по п.1, отличающееся тем, что блоки устройства выполнены в виде отдельных конструктивных модулей с возможностью их размещения как на грузоподъемном механизме, так и вне его.
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ БАШЕННОГО КРАНА | 2005 |
|
RU2286305C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МАШИНЫ | 2002 |
|
RU2234185C1 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232709C2 |

