Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления для приведения в действие присоединенной к механическому устройству вращающейся машины переменного тока.
Уровень техники
[0002] В случае управления вращающейся машиной переменного тока для приведения в действие механического устройства для того, чтобы приводить в действие вращающуюся машину переменного тока, присоединенную к механическому устройству, с желаемой реакцией, необходимо определить машинную константу механического устройства, к которому присоединена вращающаяся машина переменного тока. Однако фактическое механическое устройство имеет сложный механизм, и зачастую трудно определить точную машинную константу. Для того чтобы решить такую задачу, существует традиционный способ оценки момента инерции, который представляет собой машинную константу механического устройства.
[0003] Например, в способе, описанном в непатентном документе 1, ток вращающейся машины переменного тока обнаруживается для вычисления крутящего момента, и скорость вращения вращающейся машины переменного тока обнаруживается с помощью датчика скорости и датчика положения. Составляющая ускорения вычисляется из скорости вращения, и, исходя из уравнения движения для вращающейся машины переменного тока, вычисляется момент инерции с использованием статистического метода. В этом случае, при использовании датчика скорости и датчика положения имеется недостаток, связанный с устойчивостью к неисправностям и техническим обслуживанием.
Поэтому для того, чтобы оценить момент инерции механического устройства без использования эти датчиков, в качестве традиционного устройства управления для вращающейся машины переменного тока предложено инверторное устройство с векторным управлением.
Инверторное устройство с векторным управлением подает определенную команду тока по оси (по оси q) крутящего момента во вращающуюся машину переменного тока, которая вращается с постоянной скоростью за счет управления угловой скоростью, тем самым вызывая кратковременное изменение. Затем величина изменения крутящего момента вычисляется из обнаруженного тока, и составляющая ускорения извлекается из оцененных скоростей вращающейся машины переменного тока перед и после изменения команды тока по оси крутящего момента, тем самым вычисляя момент инерции (например, см. патентный документ 1).
[0004] В непатентном документе 2 раскрыт способ расчета коэффициента оценки скорости и коэффициента обратной связи для адаптивного алгоритма наблюдения, который конфигурируется по двум вращающимся осям при управлении без применения датчиков положения для электродвигателя.
Список цитируемой литературы
Патентный документ
[0005] Патентный документ 1: Японская выложенная патентная публикация № 2004-242430
Непатентный документ
[0006] Непатентный документ 1: ʺHigh-performance Control of a Servomotor using a Low Precision Shaft Encoder, Instantaneous Speed Observer and Identification of the Inertia Momentʺ, IEEJ transactions D, vol. 114, no. 4, 1994
Непатентный документ 2: ʺPosition Sensorless Control of PM Motor Using Adaptive Observer on Rotational Coordinateʺ, IEEJ transactions D, vol. 123, no. 5, 2003
Сущность изобретения
Задачи, решаемые изобретением
[0007] В традиционном устройстве управления для вращающейся машины переменного тока, в которой не используется ни датчик скорости, ни датчик положения, как показано в патентном документе 1 и в непатентном документе 2, скорость вращающейся машины переменного тока оценивается с использованием контроллера, такого как пропорционально-интегральный (ПИ) регулятор. Поэтому задержка происходит до тех пор, пока оцененная скорость, которая выводится из контроллера, не приблизится к предельному значению, то есть задержка оценки происходит по оцененной скорости относительно действительной скорости вращающейся машины. Таким образом, проблема состоит в том, что в вычисленном моменте инерции появляется ошибка.
[0008] Настоящее изобретение было сделано для решения вышеупомянутой проблемы, и задача настоящего изобретения состоит в том, чтобы выполнить устройство управления для вращающейся машины переменного тока, которое способно точно вычислить момент инерции без использования датчика скорости и датчика положения.
Решение задачи
[0009] Устройство управления для вращающейся машины переменного тока согласно настоящему изобретению включает в себя: блок формирования команды для формирования команды напряжения, с использованием момента инерции, для приведения в действие вращающейся машины переменного тока, присоединенной к механическому устройству; блок обнаружения тока для обнаружения тока вращающейся машины переменного тока; блок вычисления выходного крутящего момента для вычисления выходного крутящего момента вращающейся машины переменного тока на основе обнаруженного тока из блока обнаружения тока; блок оценки скорости для вычисления оцененной скорости вращающейся машины переменного тока на основе команды напряжения и обнаруженного тока; и блок вычисления момента инерции для вычисления момента инерции на основе оцененной скорости и выходного крутящего момента. Блок вычисления выходного крутящего момента задает характеристику задержки, соответствующую задержке оценки оцененной скорости, в выходном крутящем моменте. Блок вычисления момента инерции вычисляет момент инерции, используя выходной крутящий момент, имеющий характеристику задержки.
Эффект изобретения
[0010] В устройстве управления для вращающейся машины переменного тока согласно настоящему изобретению, блок вычисления момента инерции вычисляет момент инерции, используя оцененную скорость и выходной крутящий момент, имеющий характеристику задержки, соответствующую задержке оценки оцененной скорости, в результате чего можно точно вычислить момент инерции. Таким образом, устройство управления для вращающейся машины переменного тока может надежным образом управлять вращающейся машиной переменного тока с желаемой реакцией.
Краткое описание чертежей
[0011] На фиг.1 показана блок-схема, иллюстрирующая конфигурацию устройства управления для вращающейся машины переменного тока согласно варианту 1 осуществления настоящего изобретения.
На фиг.2 показана блок-схема, иллюстрирующая блок формирования команды в варианте 1 осуществления настоящего изобретения.
На фиг.3 показана блок-схема, иллюстрирующая блок вычисления момента инерции в варианте 1 осуществления настоящего изобретения.
На фиг.4 показана блок-схема, иллюстрирующая аппаратную конфигурацию системы вращающейся машины, включающей в себя устройство управления для вращающейся машины переменного тока в варианте 1 осуществления настоящего изобретения.
На фиг.5 показана временная диаграмма сигналов нескольких секций для объяснения работы устройства управления для вращающейся машины переменного тока согласно варианту 2 осуществления настоящего изобретения.
На фиг.6 показана блок-схема, иллюстрирующая конфигурацию устройства управления для вращающейся машины переменного тока согласно варианту 3 осуществления настоящего изобретения.
На фиг.7 показана блок-схема, иллюстрирующая блок вычисления выходного крутящего момента в варианте 3 осуществления настоящего изобретения.
На фиг.8 показана блок-схема, иллюстрирующая конфигурацию устройства управления для вращающейся машины переменного тока согласно варианту 4 осуществления настоящего изобретения.
Подробное описание изобретения
[0012] Вариант 1 осуществления
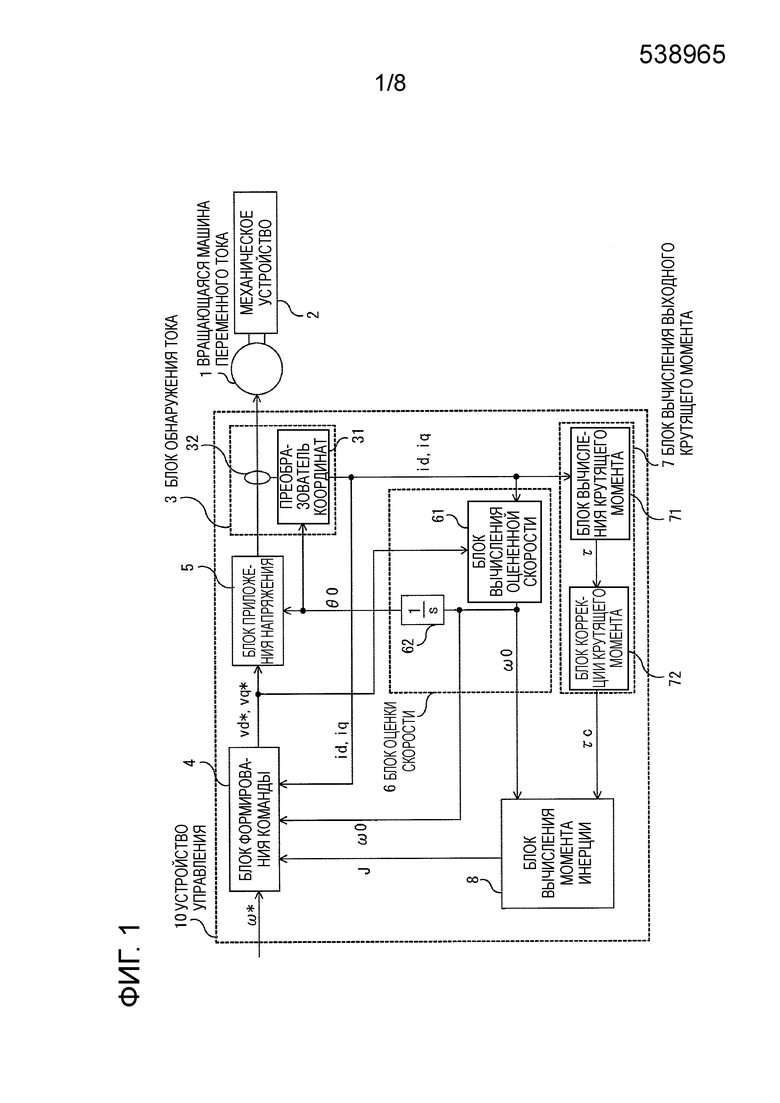
Ниже будет описано устройство управления для вращающейся машины переменного тока согласно варианту 1 осуществления настоящего изобретения. На фиг.1 показана блок-схема, иллюстрирующая конфигурацию устройства управления для вращающейся машины переменного тока согласно варианту 1 осуществления настоящего изобретения.
Как показано на фиг.1, механическое устройство 2 присоединено к вращающейся машине 1 переменного тока, и устройство 10 управления для вращающейся машины 1 переменного тока приводит в действие и управляет вращающейся машиной 1 переменного тока, в результате чего вращающаяся машина 1 переменного тока приводит в действие механическое устройство 2. В качестве вращающейся машины 1 переменного тока используется, например, синхронная машина, использующая постоянный магнит.
Устройство 10 управления включает в себя: блок 3 обнаружения тока для обнаружения тока вращающейся машины 1 переменного тока; блок 4 формирования команды для формирования команд vd* и vq* напряжения для приведения в действие вращающейся машины 1 переменного тока; блок 5 приложения напряжения для приложения напряжения к вращающейся машине 1 переменного тока; блок 6 оценки скорости для вычисления оцененной скорости ω0 и оцененного положения θ0 магнитных полюсов; блок 7 вычисления выходного крутящего момента; и блок 8 вычисления момента инерции. Блок 5 приложения напряжения конфигурируется из преобразователя мощности, такого как инверторная схема. В этом случае устройство 10 управления снабжено блоком 5 приложения напряжения, и выходной сигнал блока 5 приложения напряжения выводится из устройства 10 управления во вращающуюся машину 1 переменного тока.
[0013] Блок 3 обнаружения тока включает в себя преобразователь 31 координат для преобразования трехфазных токов iu, iv, iw вращающейся машины 1 переменного тока в токи во вращающейся системе координат с двумя осями. Блок 3 обнаружения тока обнаруживает трехфазные токи iu, iv, iw, и, используя оцененное положение θ0 магнитных полюсов, выведенное из блока 6 оценки скорости, преобразователь 31 координат выполняет преобразование координат трехфазных токов iu, iv, iw для получения токов по осям d-q, которые известны как система прямоугольных координат, которая вращается синхронно с ротором вращающейся машины 1 переменного тока. Блок 3 обнаружения тока выводит полученные токи в виде обнаруженных токов id и iq.
Для того чтобы обнаружить трехфазные токи, вместо обнаружения всех трехфазных токов, можно обнаружить токи для двух фаз и затем можно вычислить ток для оставшейся одной фазы, используя тот факт, что сумма трехфазных токов равна нулю. Альтернативно, трехфазные токи можно вычислить, например, из тока шины преобразователя мощности, тока, протекающего через переключающий элемент, и состояния переключающего элемента в блоке 5 приложения напряжения.
[0014] Произвольная команда ω* скорости для приведения в действие вращающейся машины 1 переменного тока подается в устройство 10 управления, и затем вводится в блок 4 формирования команды. На основе команды ω* скорости, оцененной скорости ω0, выведенной из блока 6 оценки скорости, и момента инерции J, выведенного из блока 8 вычисления момента инерции, блок 4 формирования команды вычисляет и подает команды vd* и vq* напряжения по осям d-q, которые необходимы для приведения в действие вращающейся машины 1 переменного тока. На фиг.2 показан пример конфигурации управления блока 4 формирования команды.
Как показано на фиг.2, блок 4 формирования команды включает в себя контроллер 42 скорости и контроллеры 44a и 44b тока. Сумматор-вычитатель 41 вычитает оцененную скорость ω0 из команды ω* скорости для вычисления отклонения Δω скорости. Контроллер 42 скорости вычисляет команду iq* тока для обнаруженного тока iq, который представляет собой ток (по оси q) крутящего момента, протекающий через ПИ-регулятор с использованием значения момента инерции J таким образом, чтобы отклонение Δω скорости становилось равным нулю.
[0015] Для того чтобы выполнить управление вращением вращающейся машины 1 переменного тока с желаемой реакцией, обычно ПИ-регулятор контроллера 42 скорости устанавливается на основе выражения (1):
iq*=kwp(1+kwi/s)⋅Δω (1)
где kwp=ωsc⋅Pm2⋅ϕf/J,
kwi=ωsc/N,
s - оператор Лапласа, ωsc - заданное значение реакции скорости, Pm - число пар полюсов вращающейся машины переменного тока, ϕf - магнитный поток магнита вращающейся машины переменного тока, J - момент инерции, и N - произвольное положительное целое число.
[0016] Далее сумматор-вычитатель 43a вычитает обнаруженный ток iq из команды iq* тока, чтобы вычислить отклонение тока по оси q. Контроллер 44a тока вычисляет команду vq* напряжения путем применения ПИ-регулирования таким образом, чтобы отклонение тока по оси q становилось равным нулю.
[0017] С другой стороны, команду id* тока по оси d можно просто установить на нуль или можно установить на основе команды iq* тока по оси q таким образом, чтобы крутящий момент, выводимый из вращающейся машины 1 переменного тока, увеличивался до максимального значения. Сумматор-вычитатель 43b вычитает обнаруженный ток id из команды id* тока, чтобы вычислить отклонение тока по оси d. Контроллер 44b тока вычисляет команду vd* напряжения путем применения ПИ-регулирования таким образом, чтобы отклонение тока по оси d становилось равным нулю.
Как описано выше контроллер 42 скорости вырабатывает команду iq* тока таким образом, чтобы оцененная скорость ω0 отслеживала команду ω* скорости, и контроллеры 44b и 44a тока вырабатывают команды vd* и vq* напряжения таким образом, чтобы обнаруженные токи id и iq отслеживали команды id* и iq* тока. Таким образом, вращающейся машиной 1 переменного тока можно управлять таким образом, чтобы оцененная скорость ω0 совпадала с командой ω* скорости.
[0018] Блок 5 приложения напряжения преобразует команды vd* и vq* напряжения по осям d-q, выводимые из блока 4 формирования команды, в команды vu*, vv*, vw* трехфазного напряжения в системе координат в состоянии покоя с использованием оцененного положения θ0 магнитных полюсов, выведенного из блока 6 оценки скорости, и затем блок 5 приложения напряжения выводит трехфазные напряжения на основе команд vu*, vv*, vw* трехфазного напряжения для приложения трехфазных напряжений к вращающейся машине 1 переменного тока.
[0019] Блок 6 оценки скорости включает в себя: блок 61 вычисления оцененной скорости, предназначенный для вычисления оцененной скорости ω0 вращающейся машины 1 переменного тока на основе обнаруженных токов id и iq и команд vd* и vq* напряжения; и интегратор 62 для интегрирования оцененной скорости ω0 для вычисления оцененного положения θ0 магнитных полюсов вращающейся машины 1 переменного тока.
Блок 61 вычисления оцененной скорости вычисляет оцененную скорость ω0 вращающейся машины 1 переменного тока известным способом на основе обнаруженных токов id и iq и команд vd* и vq* напряжения. Например, значения тока оцениваются из модели вращающейся машины переменного тока, полученной на основе команд vd* и vq* напряжения, и затем оцененная скорость ω0 вычисляется таким образом, чтобы оцененные значения тока совпадали с обнаруженными токами id и iq.
[0020] Интегратор 62 вычисляет оцененное положение θ0 магнитных полюсов с помощью следующего выражения (2), используя оцененную скорость ω0, выведенную из блока 61 вычисления оцененной скорости.
θ0=ω0/s. (2)
[0021] Способ для вычисления оцененной скорости ω0 вращающейся машины 1 переменного тока на основе обнаруженных токов id и iq и команд vd* и vq* напряжения известен без ограничения в патентном документе 1 или непатентном документе 2. Оцененная скорость ω0 вычисляется с использованием контроллера в блоке 61 вычисления оцененной скорости, и задержка по фазе возникает до тех пор, пока оцененная скорость ω0 не приблизится к своему предельному значению, то есть оцененная скорость ω0 имеет задержку оценки.
Например, как показано в непатентном документе 2, передаточная характеристика разомкнутого контура от действительной скорости ω вращающейся машины 1 переменного тока до вычисленной оцененной скорости ω0 показана с помощью передаточной функции следующим образом.
G(s)=ωac/s,
где ωac - коэффициент усиления оценки скорости.
[0022] Таким образом, передаточная функция, показывающая передаточную характеристику замкнутой системы от действительной скорости ω до оцененной скорости ω0, представлена с помощью следующего выражения (3).
Gx(s)=G(s)/(1+G(s))= ωac/(s+ωac). (3)
[0023] Как показано с помощью приведенного выше выражения (3), вычисленная оцененная скорость ω0 включает в себя задержку оценки относительно действительной скорости ω.
[0024] Блок 7 вычисления выходного крутящего момента включает в себя: блок 71 вычисления крутящего момента для вычисления выходного крутящего момента τ из обнаруженных токов id и iq; и блок 72 коррекции крутящего момента для коррекции выходного крутящего момента τ с целью вычисления скорректированного выходного крутящего момента τc.
[0025] Блок 71 вычисления крутящего момента вычисляет выходной крутящий момент τ вращающейся машины 1 переменного тока с помощью следующего выражения (4) на основе обнаруженных токов id и iq.
τ=Pm(ϕf⋅iq+(Ld - Lq)⋅id⋅iq), (4)
где Ld и Lq - индуктивность в направлениях оси d и оси q вращающейся машины переменного тока.
[0026] Блок 72 коррекции крутящего момента производит пропускание выходного крутящего момента τ, вычисленного блоком 71 вычисления крутящего момента, через фильтр, тем самым корректируя выходной крутящий момент τ. Фильтр блока 72 коррекции крутящего момента представляет собой фильтр, имеющий такую же передаточную характеристику, как и передаточная характеристика от действительной скорости ω до оцененной скорости ω0, которая показана с помощью приведенного выше выражения (3), то есть вычисляет скорректированный выходной крутящий момент τc с помощью следующего выражения (5) и осуществляет его вывод.
τc=Gx(s)⋅τ. (5)
[0027] Так как блок 71 вычисления крутящего момента вычисляет, на основе обнаруженных токов id и iq, выходной крутящий момент τ при вращении вращающейся машины 1 переменного тока с действительной скоростью ω, можно сказать, что выходной крутящий момент τ синхронизирован с действительной скоростью ω. Поэтому за счет того, что блок 72 коррекции крутящего момента корректирует выходной крутящий момент τ с использованием передаточной функции Gx(s) от действительной скорости ω до оцененной скорости ω0, выходной крутящий момент τ задерживается на величину, соответствующую задержке оценки оцененной скорости ω0, и, таким образом, скорректированный выходной крутящий момент τc и оцененная скорость ω0 могут быть синхронизированы друг с другом.
Как описано выше, используя передаточную характеристику (передаточную функцию Gx(s)), соответствующую задержке оценки оцененной скорости ω0, блок 72 коррекции крутящего момента задает характеристику задержки, соответствующую задержке оценки, в выходном крутящем моменте τ и выводит скорректированный выходной крутящий момент τc.
[0028] Блок 8 вычисления момента инерции вычисляет момент инерции J, исходя из оцененной скорости ω0 из блока 6 оценки скорости и скорректированного выходного крутящего момента τc из блока 7 вычисления выходного крутящего момента.
Между прочим, в соответствии с уравнением движения для вращающейся машины переменного тока момент инерции J вычисляется с использованием следующего выражения (6), исходя из скорости (действительной скорости) ω и выходного крутящего момента τ.
J=τ/(s⋅ω). (6)
[0029] В случае вычисления момента инерции J с использованием приведенного выше выражения (6), фильтры используются, соответственно, для выходного крутящего момента τ и скорости ω для того, чтобы подавить ошибку в вычислении.
Так как выходной крутящий момент τ вычисляется с использованием обнаруженных токов id и iq с помощью приведенного выше выражения (4), выходной крутящий момент τ содержит шум при обнаружении в высокочастотной области. Кроме того, так как во время ускорения используется переходной выходной крутящий момент, составляющая постоянного тока в низкочастотной области статической нагрузки и т.п. становится ошибкой при вычислении момента инерции.
[0030] Для того чтобы устранить такие низкочастотную составляющую и высокочастотную составляющую и извлечь переходную величину изменения крутящего момента, фильтр Fτ(s) для выходного крутящего момента τ устанавливается так, как показано с помощью следующего выражения (7).
Fτ(s)=s/f(s), (7)
где многочлен f(s) в знаменателе является кубическим многочленом s, имеющим такую характеристику, которая устраняет низкочастотную составляющую и высокочастотную составляющую.
[0031] Если переходную составляющую крутящего момента выходного крутящего момента τ обозначить dτ, переходную составляющую крутящего момента dτ можно извлечь из выходного крутящего момента τ с помощью следующего выражения (8):
dτ=Fτ(s)⋅τ. (8)
[0032] Кроме того, фильтр Fω(s) для скорости ω должен иметь такую же характеристику, как и фильтр Fτ(s) для выходного крутящего момента τ. Как показано с помощью приведенного выше выражения (6), ускорение (s⋅ω), полученное исходя из скорости ω, используется для вычисления момента инерции J. Если переходную составляющую ускорения обозначить da, переходную составляющую ускорения da можно извлечь из скорости ω с помощью следующего выражения (9), и фильтр Fω(s) можно представить с помощью следующего выражения (10).
da=Fω(s)⋅ω= Fτ(s)⋅(s⋅ω)= s⋅Fτ(s)⋅ω, (9)
Fω(s)=s⋅Fτ(s). (10)
[0033] На фиг.3 показана схема, иллюстрирующая конфигурацию блока 8 вычисления момента инерции.
Как показано на фиг.3, блок 8 вычисления момента инерции включает в себя блок 81 извлечения переходной составляющей крутящего момента, блок 82 извлечения переходной составляющей ускорения и блок 83 вычисления момента инерции. Блок 8 вычисления момента инерции принимает оцененную скорость ω0 из блока 6 оценки скорости и скорректированный выходной крутящий момент τc из блока 7 вычисления выходного крутящего момента, и скорректированный выходной крутящий момент τc вводится в блок 81 извлечения переходной составляющей крутящего момента, и оцененная скорость ω0 вводится в блок 82 извлечения переходной составляющей ускорения.
Блок 81 извлечения переходной составляющей крутящего момента соответствует вышеупомянутому фильтру Fτ(s), то есть устраняет низкочастотную составляющую и высокочастотную составляющую и извлекает переходную составляющую 81a крутящего момента из скорректированного выходного крутящего момента τc. Блок 82 извлечения переходной составляющей ускорения соответствует вышеупомянутому фильтру Fω(s), то есть устраняет низкочастотную составляющую и высокочастотную составляющую и извлекает переходную составляющую 82a ускорения из оцененной скорости ω0. Затем блок 83 вычисления момента инерции вычисляет момент инерции J путем деления переходной составляющей 81a крутящего момента переходной составляющей 82a ускорения.
[0034] В данном варианте осуществления, используя передаточную характеристику (Gx(s)) от действительной скорости ω до оцененной скорости ω0, τc и ω0 можно представить следующим образом:
τc=Gx(s)⋅τ, (11)
ω0=Gx(s)⋅ω. (12)
Таким образом, исходя из приведенного выше выражения (11), переходная составляющая 81a крутящего момента представлена следующим образом.
Fτ(s)⋅τс=Fτ(s)⋅Gx(s)⋅τ (13)
Кроме того, исходя из приведенного выше выражения (10) и выражения (12), переходная составляющая 82a ускорения представлена следующим образом.
Fω(s)⋅ ω0=s⋅ Fτ(s)⋅Gx(s)⋅ω. (14)
[0035] Таким образом, исходя из приведенных выше выражения (13) и выражения (14), момент инерции J, вычисленный в виде отношения (переходная составляющая 81a крутящего момента)/(переходная составляющая 82a ускорения), представлен следующим образом.
J=Fτ(s)⋅Gx(s)/(s⋅ Fτ(s)⋅Gx(s) ⋅ω)= τ/s⋅ω (15)
Установлено, что это выражение совпадает с помощью приведенного выше выражения (6).
Таким образом, блок 8 вычисления момента инерции может точно вычислить момент инерции J, используя скорректированный выходной крутящий момент τc и оцененную скорость ω0.
[0036] Если выходной крутящий момент τ используется непосредственно для выполнения коррекции для придания ему характеристики задержки, задержка оценки оцененной скорости ω0 появляется как задержка ускорения относительно повышения выходного крутящего момента τ, и ошибка возникает в моменте инерции, вычисленном в виде отношения (переходная составляющая крутящего момента)/(переходная составляющая ускорения). Кроме того, чем быстрее повышение действительной скорости ω вращающейся машины 1 переменного тока, тем больше задержка оценки оцененной скорости ω0, и, таким образом увеличивается ошибка в моменте инерции.
В этом случае момент инерции представлен следующим образом.
Fτ(s)⋅τ/(s⋅Fτ(s)⋅Gx(s)⋅ω)=τ/(s⋅Gx(s)⋅ω)
То есть характеристика задержки остается в составляющей знаменателя, и, таким образом, установлено, что момент инерции нельзя точно вычислить.
[0037] Если момент инерции Jm вращающейся машины 1 переменного тока, определенный заранее, используется в качестве момента инерции, который используется в блоке 4 формирования команды, коэффициент усиления kwp, используемый для вычисления команды iq* тока, показанной с помощью приведенного выше выражения (1), представлен следующим образом.
kwp=ωsc⋅Pm2⋅ϕf/Jm
В этом случае заданное значение ωsc реакции скорости в Jm/(Jm+Ja) раз становится меньше значения в случае использования первоначального момента инерции J полученного путем сложения момента инерции Jm вращающейся машины 1 переменного тока и момента инерции Ja механического устройства 2, и таким образом уменьшается. Поэтому нельзя получить желаемую реакцию скорости.
[0038] Как описано выше, в данном варианте осуществления выходной крутящий момент τ корректируется с использованием передаточной характеристики (передаточной функции Gx(s)), соответствующей задержке оценки оцененной скорости ω0, тем самым вычисляя скорректированный выходной крутящий момент τc, имеющий характеристику задержки, соответствующую задержке оценки. Затем, исходя из оцененной скорости ω0 и скорректированного выходного крутящего момента τc, вычисляется момент инерции J, имеющий характеристику задержки, эквивалентную задержке оценки оцененной скорости ω0. Таким образом, можно точно вычислить момент инерции J. Затем блок 4 формирования команды вырабатывает команды vd* и vq* напряжения, используя точно оцененный момент инерции J. Таким образом, управление вращающейся машиной 1 переменного тока можно выполнить надежным образом с желаемой реакцией.
Предполагается, что в зависимости от конфигурации механического устройства 2 момент инерции J варьируется во время работы вращающейся машины 1 переменного тока, но в то же время можно непрерывно вычислять момент инерции J, продолжая при этом извлекать переходную составляющую 81a крутящего момента и переходную составляющую 82a ускорения во время работы.
[0039] Так как передаточная функция Gx(s) замкнутой системы, синхронизированная с задержкой оценки оцененной скорости ω0, используется в качестве передаточной характеристики для коррекции выходного крутящего момента τ, скорректированный выходной крутящий момент τc, имеющий характеристику задержки, эквивалентную задержке оценки оцененной скорости ω0, можно вычислить точно, в результате чего оцененную скорость ω0 и скорректированный выходной крутящий момент τc можно синхронизировать друг с другом.
[0040] Передаточная функция Gx(s), показывающая передаточную характеристику для коррекции выходного крутящего момента τ, не ограничивается передаточной функцией, показанной с помощью приведенного выше выражения (3), но может быть передаточной функцией, которая соответствует задержке оценки, возникающей из-за вычисления оцененной скорости ω0.
[0041] В вышеупомянутом варианте осуществления блок 8 вычисления момента инерции вычисляет момент инерции J путем деления переходной составляющей 81a крутящего момента непосредственно на переходную составляющую 82a ускорения. Однако, не ограничиваясь этим, можно точно вычислить момент инерции при помощи статистического метода, как показано, например, в непатентном документе 1.
[0042] В вышеупомянутом варианте осуществления синхронная машина, использующая постоянный магнит, используется в качестве вращающейся машины 1 переменного тока. Однако можно применить и другую вращающуюся машину 1 переменного тока, такую как асинхронная машина.
[0043] Блок 5 приложения напряжения можно выполнить вне устройства 10 управления. В этом случае, устройство 10 управления подает команды vd* и vq* напряжения в блок 5 приложения напряжения.
[0044] В блоке 6 оценки скорости оцененная скорость ω0 интегрируется интегратором 62 для того, чтобы вычислить оцененное положение θ0 магнитных полюсов. Однако, не ограничиваясь этим, например, как описано в документе: ʺPosition and speed Sensorless Controls of Cylindrical Brushless DC Motors Using Disturbance Observers and Adaptive speed Estimatorsʺ, IEEJ transactions D, vol. 118, no. 7/8, 1998, с использованием оцененного наведенного напряжения в системе координат статора (по оси αβ) электродвигателя постоянного тока, оцененное положение магнитных полюсов можно вычислить из арктангенса оцененного наведенного напряжения.
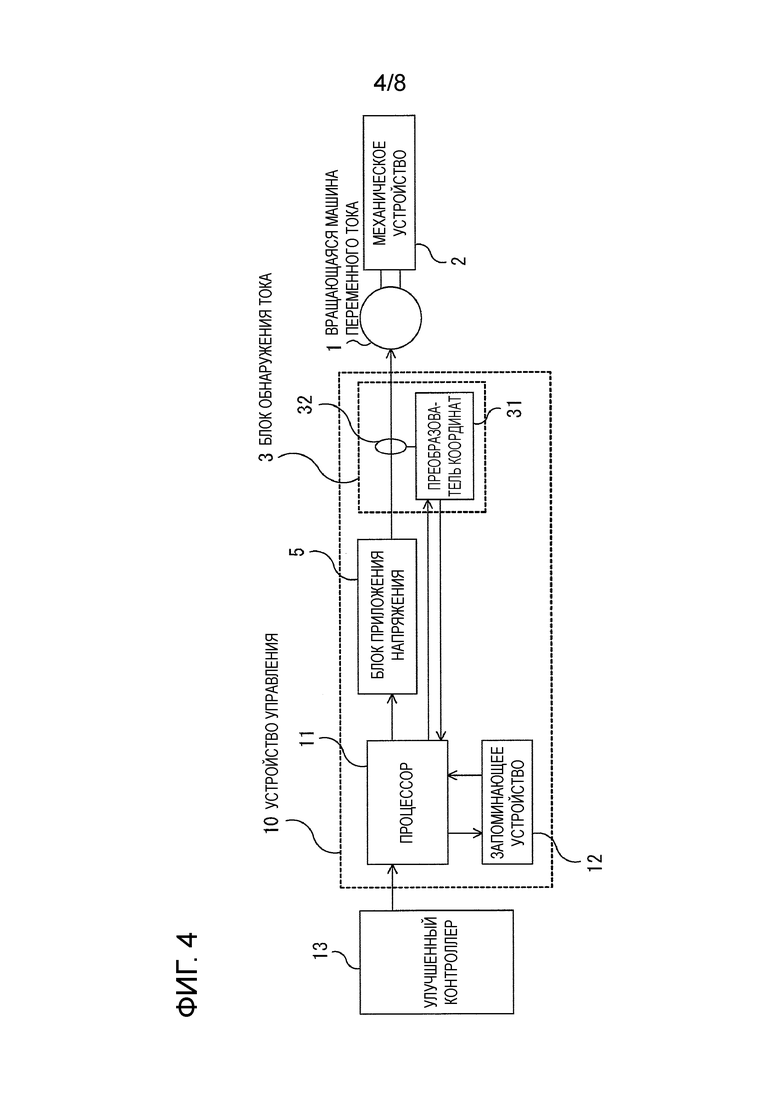
[0045] Далее, на фиг.4 показана аппаратная конфигурация системы вращающейся машины, включающей в себя устройство 10 управления для вращающейся машины 1 переменного тока согласно приведенному выше варианту 1 осуществления.
Как показано на фиг.4, система вращающейся машины включает в себя вращающуюся машину 1 переменного тока, устройство 10 управления для вращающейся машины 1 переменного тока и улучшенный контроллер 13 для подачи команды в устройство 10 управления и приведения в действие механического устройства 2, присоединенного к вращающейся машине 1 переменного тока. Устройство 10 управления включает в себя, в качестве аппаратной конфигурации, процессор 11, запоминающее устройство 12, блок 5 приложения напряжения и блок 3 обнаружения тока.
Блок 4 формирования команды, блок 6 оценки скорости, блок 7 вычисления выходного крутящего момента и блок 8 вычисления момента инерции, показанные на фиг.1, реализованы с помощью процессора 11, который исполняет программу, хранящуюся в запоминающем устройстве 12.
[0046] Запоминающее устройство 12 снабжено энергозависимым запоминающим устройством, таким как оперативное запоминающее устройство, и энергонезависимым вспомогательным запоминающим устройством, таким как флэш-память, хотя это и не показано. Вместо энергонезависимого вспомогательного запоминающего устройства можно предусмотреть вспомогательное запоминающее устройство, такое как жесткий диск.
Программа вводится в процессор 11 через энергозависимое запоминающее устройство вспомогательного запоминающего устройства запоминающего устройства 12, и процессор 11 исполняет программу, введенную из запоминающего устройства 12. Процессор 11 выводит данные, такие как результат вычисления, в энергозависимое запоминающее устройство запоминающего устройства 12 или во вспомогательное запоминающее устройство через энергозависимое запоминающее устройство, тем самым сохраняя данные.
[0047] Блок 4 формирования команды, блок 6 оценки скорости, блок 7 вычисления выходного крутящего момента и блок 8 вычисления момента инерции можно реализовать с помощью схемы обработки, такой как система высокой степени интеграции (LSI). Преобразователь 31 координат в блоке 3 обнаружения тока и функция преобразования команд vd* и vq* напряжения, вводимых в блок 5 приложения напряжения, в команды трехфазного напряжения, можно реализовать с помощью процессора 11 или схемы обработки, такой как система высокой степени интеграции. Вышеупомянутую функцию можно выполнить при взаимодействии множества процессоров 11 и множества запоминающих устройств 12, или можно выполнить при взаимодействии множества схем обработки. Вышеупомянутые функции можно выполнить путем их сочетания.
[0048] Вариант 2 осуществления
Далее будет описано устройство управления для вращающейся машины переменного тока согласно варианту 2 осуществления настоящего изобретения.
Блок 8 вычисления момента инерции получает момент инерции J, используя вычисление отношения (переходная составляющая 81a крутящего момента)/(переходная составляющая 82a ускорения), как в вышеупомянутом варианте 1 осуществления. В то же время, если значения переходной составляющей 81a крутящего момента и переходной составляющей 82a ускорения являются маленькими, отношение S/N (отношение уровня сигнала к уровню шума) ухудшается, и, таким образом, момент инерции J нельзя вычислить точно. Поэтому, для того, чтобы обеспечить отношение S/N, пороговые значения устанавливаются для переходной составляющей 81a крутящего момента и переходной составляющей 82a ускорения, и когда по меньшей мере одна из переходной составляющей 81a крутящего момента и переходной составляющей 82a ускорения равна или меньше заданного порогового значения, постоянное значение выводится как момент инерции J.
Другая конфигурация является такой же, как и в вышеупомянутом варианте 1 осуществления.
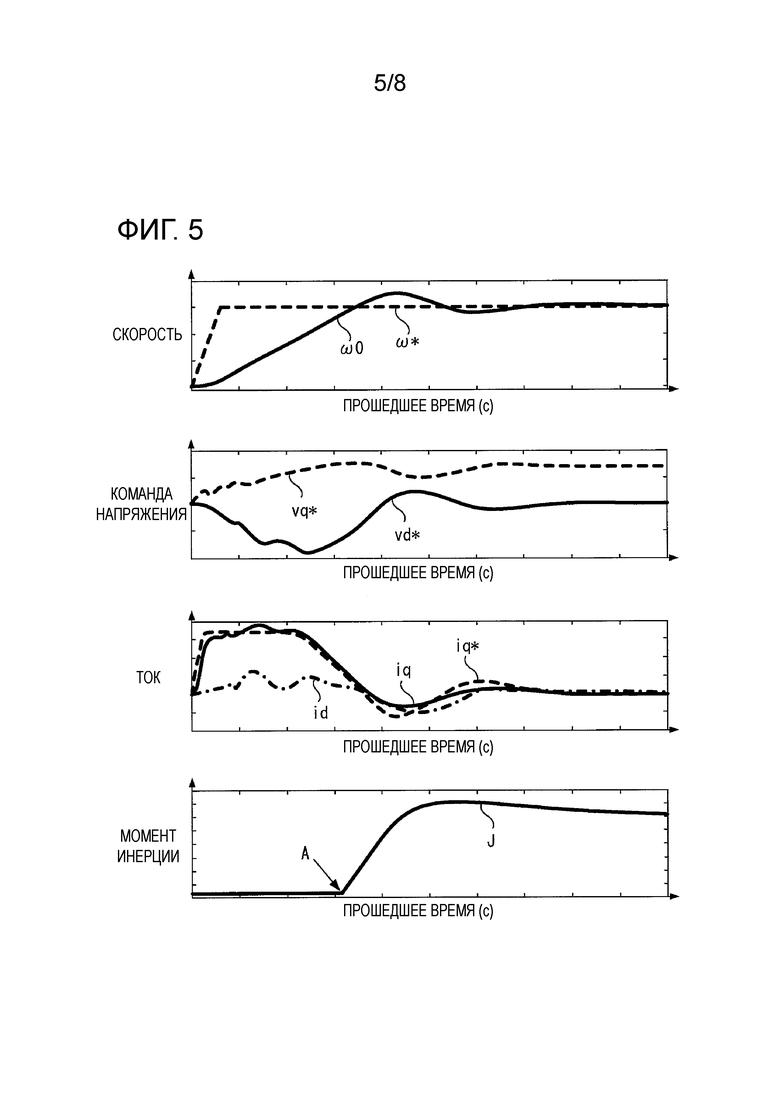
[0049] На фиг.5 показана временная диаграмма сигналов нескольких секций, иллюстрирующих работу устройства 10 управления вращающейся машины 1 переменного тока согласно варианту 2 осуществления настоящего изобретения.
Как показано на фиг.5, команда ω* скорости, заданная в устройстве 10 управления, увеличивается и затем по истечению времени оцененная скорость ω0 приближается к команде ω* скорости, и команды vd* и vq* напряжения и команда iq* тока стабилизируются, поэтому обнаруженный ток iq приближается к команде iq* тока.
На временной диаграмме сигналов, показывающей момент инерции J, на чертеже в области справа от точки А как переходная составляющая 81a крутящего момента, так и переходная составляющая 82a ускорения (не показана) равны или больше порогового значения. Момент инерции J имеет постоянное значение до тех пор, пока точка A, или после этого, имеет значение, полученное путем вычисления отношения (переходная составляющая 81a крутящего момента)/(переходная составляющая 82a ускорения).
[0050] В данном варианте 2 осуществления получается такой же эффект, как и в вышеупомянутом варианте 1 осуществления, и к тому же в блок 8 вычисления момента инерции подаются пороговые значения для переходной составляющей 81a крутящего момента и переходной составляющей 82a ускорения для остановки вычисления с низкой надежностью, в результате чего можно предотвратить снижение точности вычисления момента инерции. Кроме того, во время периода, в течение которого останавливается вычисление, в качестве момента инерции используется постоянное значение, в результате чего устройство 10 управления может непрерывно управлять вращающейся машиной 1 переменного тока.
Также как и в случае, где момент инерции варьируется во время работы, продолжается извлечение переходной составляющей 81a крутящего момента и переходной составляющей 82a ускорения, и вычисление выполняется вместе с определением того, можно или нет выполнить вычисление момента инерции, в результате чего точность вычисления можно поддерживать на высоком уровне.
[0051] Вариант 3 осуществления
Далее будет описано устройство управления для вращающейся машины переменного тока согласно варианту 3 осуществления настоящего изобретения.
На фиг.6 показана блок-схема, иллюстрирующая конфигурацию устройства 10a управления для вращающейся машины 1 переменного тока согласно варианту 3 осуществления настоящего изобретения.
Как показано на фиг.6, устройство 10a управления включает в себя блок 3 обнаружения тока, блок 4 формирования команды, блок 5 приложения напряжения, блок 6 оценки скорости, блок 7a вычисления выходного крутящего момента и блок 8 вычисления момента инерции. Блок 7a вычисления выходного крутящего момента включает в себя блок 71a вычисления крутящего момента для вычисления выходного крутящего момента τa. Блок 71a вычисления крутящего момента вычисляет выходной крутящий момент τa на основе обнаруженных токов id и iq из блока 3 обнаружения тока, команд vd* и vq* напряжения из блока 4 формирования команды и оцененной скорости ω0 из блока 6 оценки скорости. Конфигурация, которая отличается от конфигурации блока 7a вычисления выходного крутящего момента, является такой же, как и в вышеупомянутом варианте 1 осуществления.
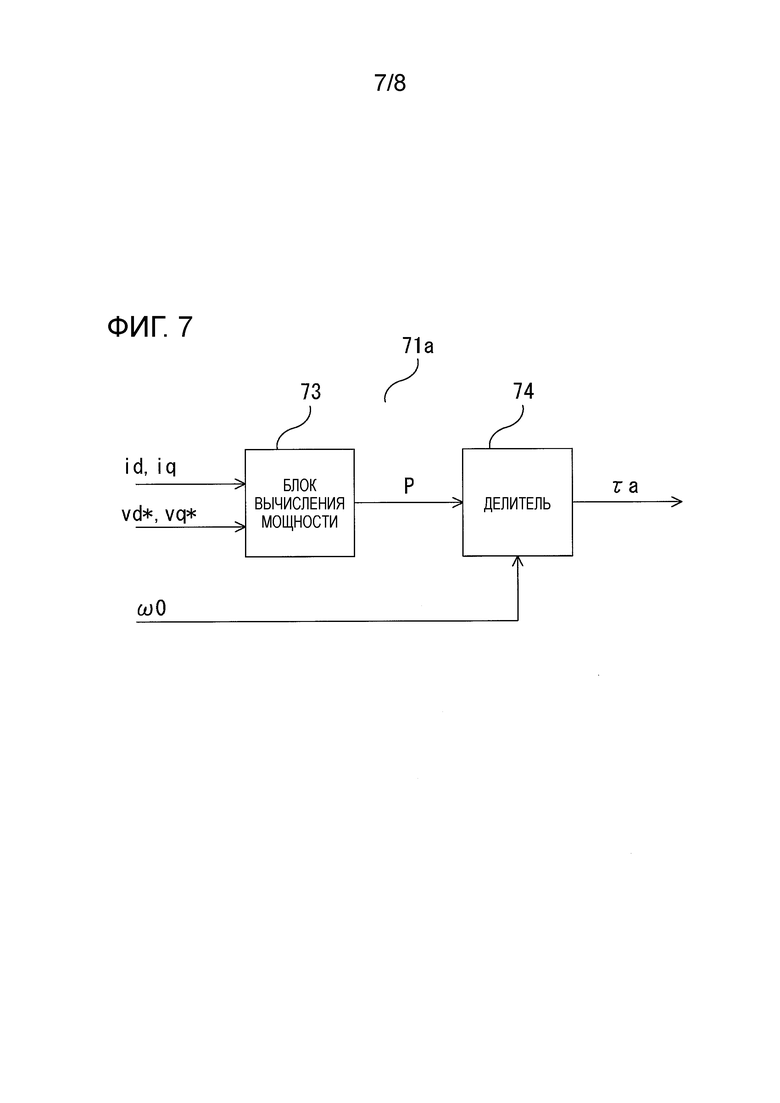
[0052] На фиг.7 показана схема, иллюстрирующая конфигурацию блока 71a вычисления крутящего момента.
Как показано на фиг.7, блок 71a вычисления крутящего момента включает в себя: блок 73 вычисления мощности для вычисления мощности P, выводимой из вращающейся машины 1 переменного тока, на основе обнаруженных токов id и iq и команд vd* и vq* напряжения; и делитель 74 для вычисления выходного крутящего момента τa путем деления мощности P из блока 73 вычисления мощности на оцененную скорость ω0.
[0053] Блок 73 вычисления мощности вычисляет мощность P с помощью следующего выражения (16) с использованием внутреннего произведения напряжения (команды vd* и vq* напряжения) на ток (обнаруженные токи id и iq).
P=vd*⋅id+vq*⋅iq. (16)
[0054] Затем делитель 74 вычисляет выходной крутящий момент τa с помощью следующего выражения (17):
τa=P/ω0. (17)
[0055] В делителе 74 для деления мощности P на оцененную скорость ω0, устанавливается нижнее предельное значение для предотвращения деления на нуль, и когда величина оцененной скорости ω0 становится меньше заданного нижнего предельного значения, деление, показанное с помощью приведенного выше выражения (17), останавливается. В этом случае, выходной крутящий момент τa вычисляется на основе обнаруженных токов id и iq с помощью приведенного выше выражения (4), используемого для вычисления выходного крутящего момента в вышеупомянутом варианте 1 осуществления.
[0056] В этом случае, как и в вышеупомянутом варианте 1 осуществления, оцененное положение θ0 магнитных полюсов, выводимое из блока 6 оценки скорости, используется одновременно для преобразования команд vd* и vq* напряжения в трехфазные команды напряжения в системе координат в состоянии покоя (трехфазная система координат) и для преобразования координат преобразователем 31 координат для получения обнаруженных токов id и iq. Поэтому даже в том случае, когда оцененное положение θ0 магнитных полюсов имеет ошибку из-за задержки оценки относительно фактического положения магнитных полюсов, разность фаз между напряжением и током не изменяется, и таким образом значение внутреннего произведения не изменяется. То есть, блок 73 вычисления мощности может точно вычислить мощность P без влияния на нее ошибки оцененного положения θ0 магнитных полюсов.
[0057] В общем, выходной крутящий момент вращающейся машины, можно вычислить путем деления выходной мощности на скорость. Делитель 74 вычисляет выходной крутящий момент τa путем деления мощности P на оцененную скорость ω0. В то же время, путем деления точно вычисленной мощности P на оцененную скорость ω0, характеристику задержки, соответствующую задержке оценки оцененной скорости ω0, можно задать в вычисленном выходном крутящем моменте τa.
Затем блок 8 вычисления момента инерции принимает оцененную скорость ω0 из блока 6 оценки скорости и выходной крутящий момент τa из блока 7a вычисления выходного крутящего момента и вычисляет момент инерции J так же, как и в вышеупомянутом варианте 1 осуществления.
[0058] В данном варианте осуществления, так как блок 7a вычисления выходного крутящего момента задает характеристику задержки, соответствующую задержке оценки оцененной скорости ω0, в выходном крутящем моменте τa при вычислении выходного крутящего момента τa, выходной крутящий момент τa и задержка оценки оцененной скорости ω0 имеют эквивалентные характеристики задержки. Таким образом, как и в вышеупомянутом варианте 1 осуществления, можно точно вычислить момент инерции J, и получается такой же эффект, как и в вышеупомянутом варианте 1 осуществления.
Кроме того, можно точно вычислить выходной крутящий момент τa, имеющий характеристику задержки, путем деления, на оцененную скорость ω0, мощности P, точно вычисленной из обнаруженных токов id и iq и команд vd* и vq* напряжения, для которых используется одинаковое оцененное положение θ0 магнитных полюсов в их преобразованиях координат.
Кроме того, так как для делителя 74 устанавливается нижнее предельное значение для переключения вычисления выходного крутящего момента τa даже в том случае, если оцененная скорость ω0 становится равной нулю в зависимости от режима работы вращающейся машины 1 переменного тока, выходной крутящий момент τa можно вычислять непрерывно, в результате чего устройство 10a управления может непрерывно управлять вращающейся машиной 1 переменного тока.
[0059] Хотя выходной крутящий момент можно вычислить путем деления выходной мощности на скорость, в качестве альтернативы для оцененной скорости ω0 можно использовать скорость. Например, угловую частоту напряжения, прикладываемого к вращающейся машине 1 переменного тока, можно рассматривать как скорость для выходной мощности P, и можно также вычислить выходной крутящий момент τa, используя, в делителе 74, угловую частоту, как показано в вышеупомянутом непатентном документе 2.
[0060] Вариант 4 осуществления
Далее, со ссылкой на фиг.8, будет описано устройство управления для вращающейся машины переменного тока согласно варианту 4 осуществления настоящего изобретения.
В данном варианте 4 осуществления, как показано на фиг.8, блок 7b вычисления выходного крутящего момента включает в себя блок 71a вычисления крутящего момента и блок 72 коррекции крутящего момента, и блок 72 коррекции крутящего момента корректирует выходной крутящий момент τa, вычисленный блоком 71a вычисления крутящего момента, и выводит скорректированный выходной крутящий момент τb. Другая конфигурация является такой же, как и в вышеупомянутом варианте 3 осуществления.
[0061] Блок 71a вычисления крутящего момента имеет такую же конфигурацию, как и в вышеупомянутом варианте 3 осуществления, и вычисляет мощность P из обнаруженных токов id и iq и команд vd* и vq* напряжения и делит мощность P на оцененную скорость ω0, тем самым вычисляя выходной крутящий момент τa, имеющий характеристику задержки.
Блок 72 коррекции крутящего момента имеет такую же конфигурацию, как и в вышеупомянутом варианте 1 осуществления, и производит пропускание выходного крутящего момента τa, вычисленного с помощью блока 71a вычисления крутящего момента, через фильтр, тем самым выводя скорректированный выходной крутящий момент τb. Фильтр блока 72 коррекции крутящего момента представляет собой фильтр, имеющий такую же передаточную характеристику, как и передаточная характеристика от действительной скорости ω до оцененной скорости ω0.
[0062] Как описано выше, в данном варианте осуществления блок 7b вычисления выходного крутящего момента задает характеристику задержки, соответствующую задержке оценки оцененной скорости ω0, в выходном крутящем моменте τa, и дополнительно корректирует выходной крутящий момент τa, в результате чего становится возможным дополнительное точное доведение характеристики задержки скорректированного выходного крутящего момента τb близко к характеристике задержки, соответствующей задержке оценки оцененной скорости ω0. Таким образом, получается такой же эффект, как и в вышеупомянутом варианте 3 осуществления, и, кроме того, можно дополнительно точно вычислить момент инерции J.
[0063] Следует отметить, что в рамках настоящего изобретения вышеупомянутые варианты осуществления можно свободно объединять друг с другом, или каждый из вышеупомянутых вариантов осуществления можно при необходимости модифицировать или упрощать.




Изобретение относится к области электротехники и может быть использовано для приведения в действие вращающейся машины переменного тока, присоединенной к механическому устройству. Техническим результатом является обеспечение точности вычисления момента инерции без использования датчика скорости и датчика положения. Устройство (10) управления для вращающейся машины (1) переменного тока включает в себя: блок (3) обнаружения тока; блок (4) формирования команды для формирования команды напряжения с использованием момента инерции J; блок (6) оценки скорости для вычисления оцененной скорости ω0 на основе команды напряжения и обнаруженного тока; блок (7) вычисления выходного крутящего момента для вычисления выходного крутящего момента на основе обнаруженного тока и блок (8) вычисления момента инерции для вычисления момента инерции J. Блок (7) вычисления выходного крутящего момента задает характеристику задержки, соответствующую задержке оценки оцененной скорости ω0, в выходном крутящем моменте, и блок (8) вычисления момента инерции вычисляет момент инерции J на основе оцененной скорости ω0 и выходного крутящего момента, имеющего характеристику задержки. 9 з.п. ф-лы, 8 ил.
1. Устройство управления для вращающейся машины переменного тока, содержащее:
блок формирования команды для формирования команды напряжения, с использованием момента инерции, для приведения в действие вращающейся машины переменного тока, присоединенной к механическому устройству;
блок обнаружения тока для обнаружения тока вращающейся машины переменного тока;
блок вычисления выходного крутящего момента для вычисления выходного крутящего момента вращающейся машины переменного тока на основе обнаруженного тока из блока обнаружения тока;
блок оценки скорости для вычисления оцененной скорости вращающейся машины переменного тока на основе команды напряжения и обнаруженного тока; и
блок вычисления момента инерции для вычисления момента инерции на основе оцененной скорости и выходного крутящего момента, причем
блок вычисления выходного крутящего момента задает характеристику задержки, соответствующую задержке оценки оцененной скорости, в выходном крутящем моменте, и
блок вычисления момента инерции вычисляет момент инерции, используя выходной крутящий момент, имеющий характеристику задержки.
2. Устройство управления для вращающейся машины переменного тока по п.1, в котором
блок вычисления выходного крутящего момента задает характеристику задержки в выходном крутящем моменте путем вычисления выходного крутящего момента на основе: выходной мощности, полученной из обнаруженного тока и команды напряжения; и оцененной скорости.
3. Устройство управления для вращающейся машины переменного тока по п.1, в котором
блок вычисления выходного крутящего момента включает в себя блок коррекции крутящего момента для коррекции выходного крутящего момента, вычисленного на основе обнаруженного тока, и
блок коррекции крутящего момента корректирует выходной крутящий момент, используя передаточную характеристику, соответствующую задержке оценки оцененной скорости, тем самым задавая характеристику задержки в выходном крутящем моменте.
4. Устройство управления для вращающейся машины переменного тока по п.2, в котором
блок вычисления выходного крутящего момента включает в себя блок коррекции крутящего момента для коррекции вычисленного крутящего момента, и
блок коррекции крутящего момента корректирует выходной крутящий момент, используя передаточную характеристику, соответствующую задержке оценки оцененной скорости.
5. Устройство управления для вращающейся машины переменного тока по п.3 или 4, в котором
передаточная характеристика представляет собой передаточную функцию замкнутой системы, синхронизированную с задержкой оценки оцененной скорости.
6. Устройство управления для вращающейся машины переменного тока по п.2 или 4, в котором
блок вычисления выходного крутящего момента вычисляет выходной крутящий момент путем деления выходной мощности на оцененную скорость, и когда величина оцененной скорости становится меньше установленного нижнего предельного значения, вычисляет выходной крутящий момент на основе обнаруженного тока без использования выходной мощности и оцененной скорости.
7. Устройство управления для вращающейся машины переменного тока по любому из пп.1-4, в котором
оцененное положение магнитных полюсов вращающейся машины переменного тока, вычисленное на основе оцененной скорости, используется в преобразовании координат между вращающейся системой координат с двумя осями и трехфазной системой координат, как для обнаруженного тока, так и для команды напряжения.
8. Устройство управления для вращающейся машины переменного тока по любому из пп.1-4, в котором
блок вычисления момента инерции извлекает переходную составляющую ускорения из оцененной скорости, извлекает переходную составляющую крутящего момента из выходного крутящего момента, имеющего характеристику задержки, и вычисляет момент инерции из переходной составляющей ускорения и переходной составляющей крутящего момента,
пороговые значения устанавливаются соответственно для переходной составляющей ускорения и переходной составляющей крутящего момента, и
когда по меньшей мере одна из переходной составляющей ускорения и переходной составляющей крутящего момента равна или меньше соответствующего порогового значения, блок вычисления момента инерции выводит постоянную величину в виде момента инерции.
9. Устройство управления для вращающейся машины переменного тока по любому из пп.1-4, в котором
блок обнаружения тока включает в себя преобразователь координат для преобразования тока вращающейся машины переменного тока в ток во вращающейся системе координат с двумя осями и обнаружения обнаруживаемого тока в виде тока во вращающейся системе координат с двумя осями, и
блок формирования команды включает в себя: контроллер скорости для формирования команды тока таким образом, чтобы оцененная скорость следовала за командой скорости; и контроллер тока для формирования команды напряжения таким образом, чтобы обнаруженный ток следовал за командой тока.
10. Устройство управления для вращающейся машины переменного тока по любому из пп.1-4, дополнительно содержащее блок приложения напряжения для приложения напряжения к вращающейся машине переменного тока на основе команды напряжения.
| УСТРОЙСТВО ВЕКТОРНОГО УПРАВЛЕНИЯ ДВИГАТЕЛЯ С СИНХРОНИЗАЦИЕЙ НА ПОСТОЯННОМ МАГНИТЕ | 2006 |
|
RU2397601C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2009 |
|
RU2481693C1 |
| JP 2006025583 A,26.01.2006 | |||
| JP 2013042630 A, 28.02.2013 | |||
| US 2014028224 A1, 30.01.2014 | |||
| US 2012181970 A1, 19.07.2012 | |||
| ГЕРБИЦИДНЫЙ СОСТАВ | 1993 |
|
RU2048772C1 |
| WO 2013041416 A1, 28.03.2013. | |||

