Настоящее изобретение относится к способу управления железнодорожным транспортным средством, содержащим контроллер двигателя для электрической машины, воздействующей по меньшей мере на одно колесо железнодорожного транспортного средства.
Кроме того, настоящее изобретение относится к контроллеру крутящего момента для железнодорожного транспортного средства, содержащего контроллер двигателя для электрической машины, воздействующей по меньшей мере на одно колесо железнодорожного транспортного средства.
Наконец, настоящее изобретение относится к железнодорожному транспортному средству, содержащему такой контроллер, и компьютерному программному продукту.
Противоскользящие устройства в соответствии с существующим уровнем техники выполняют функцию управления антиблокировочной системой (ABC), обычно поддерживая усилие на пределе сцепления посредством порога скорости, ускорения и рывка. Обычно применяют две стратегии. Первая стратегия нацелена на исключение ("ослабление") пробуксовки, чтобы функционировать в диапазоне микропроскальзывания кривой сцепления, насколько это возможно. Первая стратегия требует быстрой модуляции крутящего момента, создавая периодический треугольный исходный профиль крутящего момента. Вторая нацелена на "удержание" постоянной величины пробуксовки, чтобы воспользоваться преимуществом очищающего действия вследствие увеличения температуры поверхности колеса (регенерация сцепления). Вторая стратегия, регулирующая постоянную величину пробуксовки, должна применять менее переменное усилие, но, принимая заранее определенные пороги пробуксовки/скольжения колеса, ускорения и рывка, в реальных приложениях усилие на колесе и скорость вращения колеса иногда могут вызывать нежелательные колебания.
В публикации "Adaptive nonlinear control of braking in railway vehicles" Капорале (Caporale) и др., "52-nd IEEE Conference on Decision and Control", 10-13 декабря 2013 г., Флоренция, Италия, раскрыта методика функционирования антипробуксовочной системы в железнодорожных транспортных средствах. В статье раскрыта упрощенная модель для оценки кривой сцепления.
Цель изобретения состоит в том, чтобы обеспечить эталонный крутящий момент настолько постоянным, насколько это возможно, чтобы предотвратить возбуждение возможного резонанса трансмиссий и следовать изменяющимся условиям рельса.
В соответствии с аспектом предложен способ управления железнодорожным транспортным средством, содержащим контроллер двигателя для электрической машины, воздействующей по меньшей мере на одно колесо железнодорожного транспортного средства. Способ включает:
- получение запроса крутящего момента от центрального контроллера;
- определение фактической скорости железнодорожного транспортного средства;
- определение фактической скорости вращения колеса железнодорожного транспортного средства; - получение расчетного крутящего момента от контроллера двигателя;
- оценку максимального коэффициента сцепления на основе скорости вращения колеса и расчетного крутящего момента, полученного от контроллера двигателя;
- определение эталонного крутящего момента на основе оцененного коэффициента сцепления; и
- предоставление эталонного крутящего момента контроллеру двигателя.
В соответствии с вариантами осуществления настоящее изобретение может включать в себя один или несколько следующих признаков:
- главный контроллер получает данные от машиниста железнодорожного транспортного средства и/или системы безопасности поезда;
- для оценки максимального коэффициента сцепления используют линейный фильтр;
- линейный фильтр представляет собой фильтр Калмана;
- электрическую машину используют для ускорения или замедления железнодорожного транспортного средства;
- расчетный крутящий момент основан на напряжении, измеренном на входе инвертора и/или на фазовых токах электрической машины;
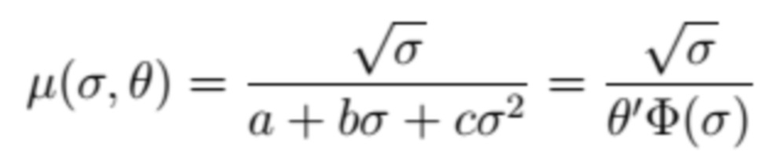
- для оценки максимального сцепления применяют модель с тремя параметрами, в частности, с использованием следующего уравнения:
 ,
,
где  – вектор независимых переменных в регрессии, а
– вектор независимых переменных в регрессии, а
 - вектор параметров, μ – сцепление, и σ – пробуксовка.
- вектор параметров, μ – сцепление, и σ – пробуксовка.
- эталонный крутящий момент рассчитывают для каждой моторизованной оси отдельно, причем моторизованная ось представляет собой ось, на которую воздействует электрическая машина;
- электрическая машина представляет собой электрическую машину с постоянными магнитами или асинхронный двигатель;
- управление с обратной связью используют для определения эталонного крутящего момента;
- в управлении с обратной связью используют PI- или PID-регуляторы; и/или
- используют разницу между оптимальной скоростью вращения колеса и фактической скоростью вращения колеса, при этом оптимальную скорость вращения колеса определяют на основе максимального коэффициента сцепления.
В соответствии с другим аспектом предложен контроллер крутящего момента для железнодорожного транспортного средства, содержащего контроллер двигателя для электрической машины, воздействующий, по меньшей мере, на одно колесо железнодорожного транспортного средства, причем контроллер крутящего момента приспособлен для того, чтобы
- получать запрос крутящего момента от центрального контроллера; - получать или оценивать фактическую скорость железнодорожного транспортного средства;
- получать фактическую скорость вращения колеса железнодорожного транспортного средства; - получать расчетный крутящий момент от контроллера двигателя;
- оценивать максимальный коэффициент сцепления на основе скорости вращения колеса и расчетного крутящего момента, полученного от контроллера двигателя;
- определять эталонный крутящий момент на основе оцененного коэффициента сцепления; и
- отправлять эталонный крутящий момент на контроллер двигателя.
В соответствии с еще одним аспектом предложено железнодорожное транспортное средство, содержащее контроллер двигателя для электрической машины, воздействующей по меньшей мере на одно колесо железнодорожного транспортного средства, множество колес, один или несколько датчиков 14 колес для определения скорости вращения колес, при этом железнодорожное транспортное средство содержит контроллер крутящего момента в соответствии с вариантом осуществления, описанным в данном документе.
Наконец, настоящее изобретение относится к компьютерному программному продукту, содержащему команды для реализации способа в соответствии с вариантом осуществления, описанным в данном документе, при загрузке и исполнении на процессоре.
Так что способ, при котором вышеприведенные признаки настоящего изобретения можно понять в деталях, более конкретное описание изобретения, кратко изложенное выше, можно читать со ссылкой на варианты осуществления. Сопровождающие чертежи относятся к вариантам осуществления изобретения и описаны следующим образом:
На фиг. 1 схематично показано железнодорожное транспортное средство;
на фиг. 2 схематично показана блок-схема контроллера в соответствии с изобретением;
на фиг. 3 показана принципиальная блок-схема для определения эталонного крутящего момента;
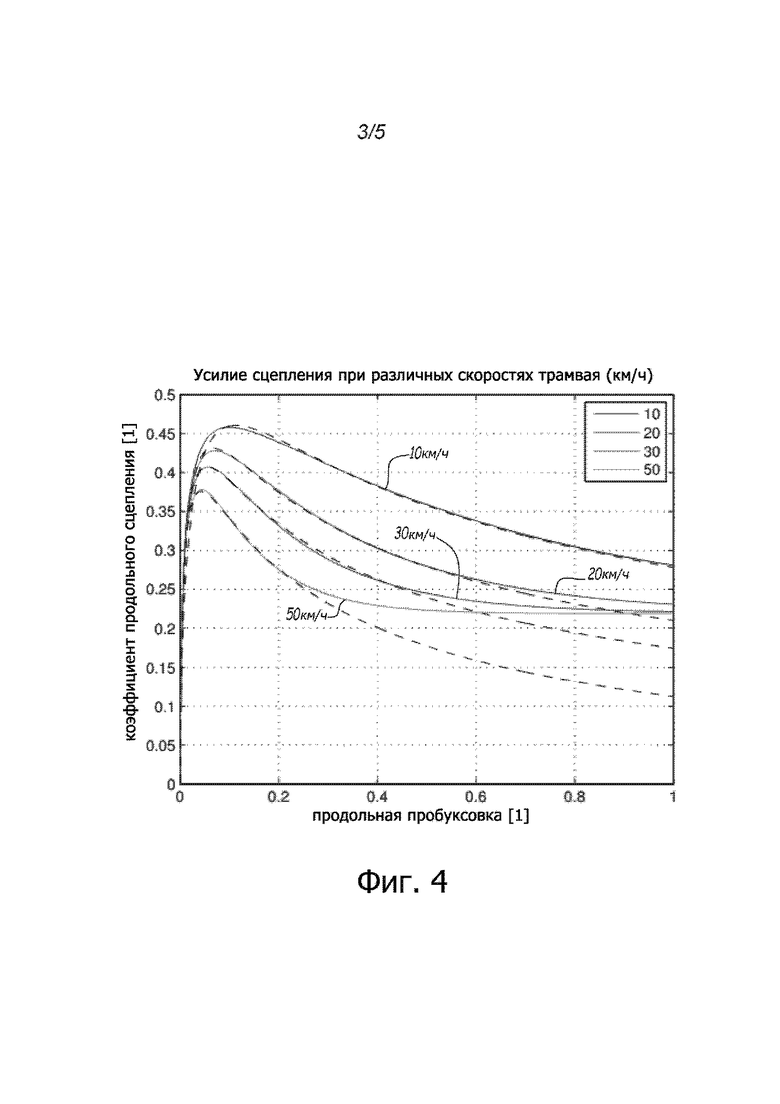
на фиг. 4 схематически показаны кривые сцепления в зависимости от продольной пробуксовки;
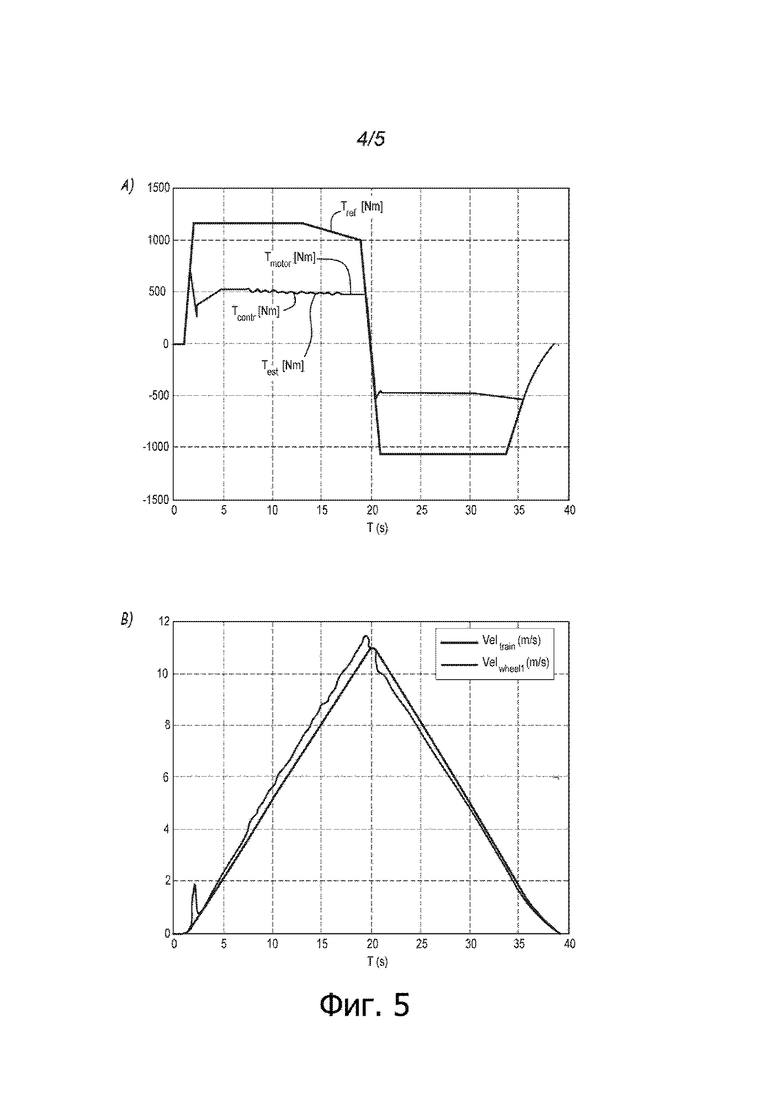
на фиг. 5 схематически показана кривая крутящих моментов; и кривая скорости поезда и скорости колеса, и
на фиг. 6 показана принципиальная блок-схема для определения эталонного крутящего момента в соответствии с изобретением.
На фиг. 1 показано железнодорожное транспортное средство 1, перемещающееся по рельсам 2. Железнодорожное транспортное средство 1 включает в себя колеса 3, которые приводят в движение посредством по меньшей мере одной электрической машины 5. Далее упоминается только одна электрическая машина 5, однако варианты осуществления относятся также к железнодорожным транспортным средствам с несколькими электрическими машинами 5. Электрическая машина 5 предназначена для ускорения и замедления колес 3. Кроме того, железнодорожное транспортное средство включает в себя контроллер 7 двигателя. Инвертор 8 подает питание на электрическую машину. Контроллер 7 двигателя управляет состоянием электрической машины 5 и оценивает крутящий момент Test двигателя по измерению фазных токов электрической машины 5 и по измерению или оценке фазных напряжений электрической машины 5, которые можно вывести из измерения напряжения на шине постоянного тока, тока на входе инвертора и состояния команд инвертора.
В соответствии с вариантом осуществления электрическая машина 5 представляет собой машину с постоянными магнитами. В другом варианте осуществления электрическая машина представляет собой асинхронный двигатель.
Железнодорожное транспортное средство также содержит центральный контроллер 9, который приспособлен для приема команд машиниста или другой системы, которые определяют эталонную скорость и/или эталонный крутящий момент Tref для колес 3. Другими словами, Tref соответствует запросу крутящего момента. Например, другая система может представлять собой систему безопасности поезда, например, такую как Европейская система управления движением поездов.
В варианте осуществления железнодорожное транспортное средство 1 включает в себя по меньшей мере один датчик 12 скорости для определения скорости v железнодорожного транспортного средства 1. В качестве альтернативы, скорость v железнодорожного транспортного средства 1 может быть оценена путем уточнения измеренной скорости колес, выполняемого устройством ABC. Кроме того, железнодорожное транспортное средство 1 имеет один или несколько датчиков 14 колес для определения скорости ω вращения колес 3. В варианте осуществления, который может быть объединен с другими вариантами осуществления, описанными в данном документе, железнодорожное транспортное средство 1 включает в себя контроллер 16 крутящего момента. В соответствии с вариантом осуществления контроллер крутящего момента представляет собой устройство управления антиблокировочной системой (ABC). Контроллер 16 крутящего момента выполнен с возможностью вычисления эталонного крутящего момента, который затем подают на контроллер 7 двигателя. В варианте осуществления контроллер 16 крутящего момента соединен с контроллером 7 двигателя, чтобы получать вычисленный крутящий момент двигателя. Кроме того, контроллер 16 крутящего момента соединен с главным контроллером 9, чтобы принимать запрос Tref крутящего момента. Кроме того, контроллер 16 крутящего момента прямо или опосредовано соединен с датчиком 12 скорости и датчиком 14 колеса, чтобы принимать данные для определения фактической скорости железнодорожного транспортного средства 1 и скорости вращения колес 3. В варианте осуществления контроллер 16 крутящего момента выполнен с возможностью использования выходного сигнала одного или нескольких датчиков 14 колес для оценки скорости v железнодорожного транспортного средства 1.
В варианте осуществления центральный контроллер 9, контроллер 7 двигателя и/или контроллер 16 крутящего момента выполнены в виде одного контроллера или двух или нескольких контроллеров.
Контроллер 16 крутящего момента предусмотрен для предотвращения скольжения или пробуксовки колес 3. Например, контроллер 16 крутящего момента выполнен с возможностью вычисления максимального сцепления между колесами 3 и рельсом 2.
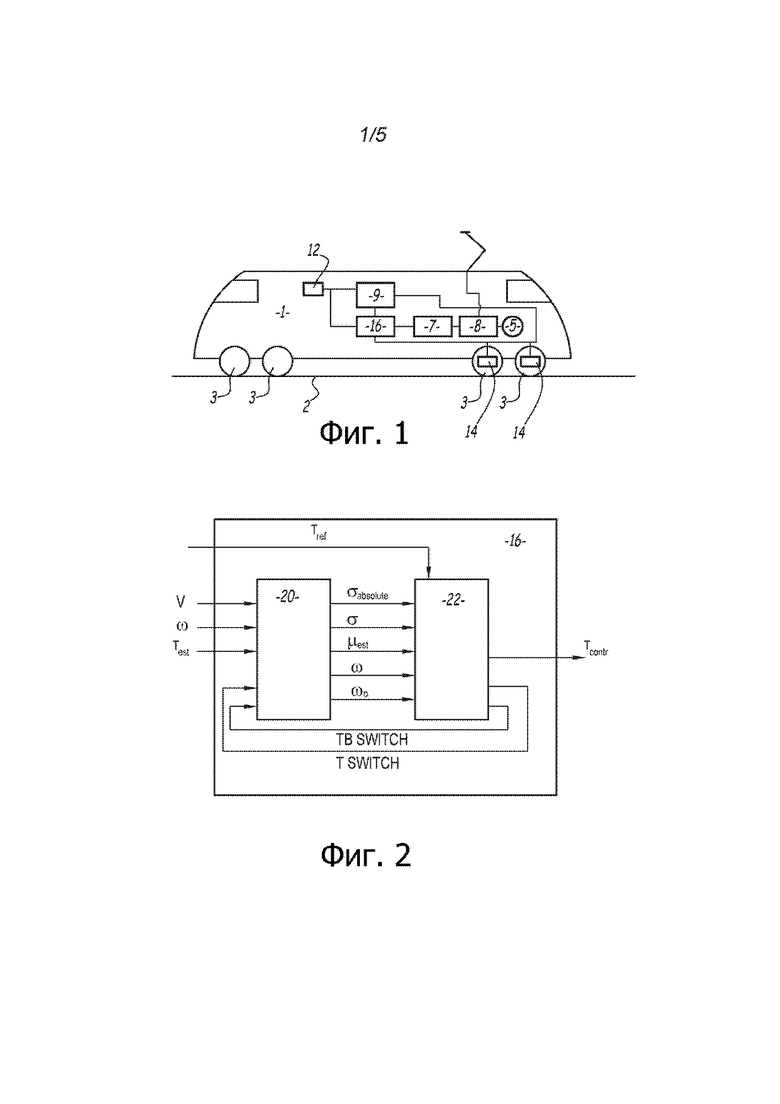
На фиг. 2 более подробно показаны блоки, предусмотренные в контроллере 16 крутящего момента. Первый блок 20 предназначен для оценки максимального сцепления (µest) железнодорожного транспортного средства 1, в частности колес 3, с рельсом. Кроме того, первый блок 20 вычисляет оптимальную скорость вращения колеса ω0, пробуксовку σ и абсолютное значение пробуксовки σAbsolute. Первый блок 20 также предоставляет в качестве выходного сигнала (фактическую) скорость ω колеса.
Как уже описано выше, сцепление µ колеса с рельсом зависит от состояния поверхности колеса/рельса (например, сухая или мокрая) и от скорости v железнодорожного транспортного средства. Скольжение или пробуксовка зависит от сцепления µ, от скорости вращения колес 3, от скорости v железнодорожного транспортного средства 1 и от фактической езды или усилия торможения. Другими словами, скольжение или пробуксовка – это разница между тангенциальной скоростью колеса (в точке контакта на рельсе) и скоростью v железнодорожного транспортного средства 1.
Кроме того, второй блок 22 выполнен с возможностью вычисления крутящего момента Tcontr, который должен быть передан электрической машиной 5 на колесо 3. В соответствии с вариантами осуществления второй блок 22 реализует управление как таковое.
Крутящий момент колеса 3 зависит от крутящего момента электрической машины 5. Выходной крутящий момент Tcontr второго блока 22 приспособлен для подачи на контроллер 7 двигателя. Второй блок 22 выполнен с возможностью управления крутящим моментом на основе оцененного максимального сцепления µest от первого блока 20, пробуксовки σ и запроса Tref крутящего момента, предоставляемого центральным контроллером 9.
В варианте осуществления контроллер 16 крутящего момента, в частности второй блок 22, включает в себя первое устройство выбора, предназначенное для выбора того, предоставляется ли эталонный крутящий момент Tref непосредственно как выходной крутящий момент Tcontr или нет. В дополнительном примере контроллер 16 крутящего момента, в частности второй блок 22, включает в себя второе устройство выбора, предназначенное для проведения различия между тягой и торможением. Эту информацию передают от второго блока на первый блок 20. Например, второй блок 22 предоставляет значения TSWITSCH и TBSWITCH первому блоку 20.
TSWITCH - это логическое (или булево) значение, которое равно 0 (ложь) или 1 (истина). Если TSWITCH равно 0, то эталонный крутящий момент Tcontr, передаваемый двигателю, представляет собой значение Tref, определяемое машинистом. Если TSWITCH равно 1, то крутящий момент Tref больше не задают в качестве выходного, а рассчитывают выход Tcontr для использования максимально доступной силы сцепления. Этот сигнал всегда меньше или равен (по абсолютной величине) задаваемому машинистом крутящему моменту Tref. TBSWITCH - еще одно логическое значение, позволяющее различать тягу и торможение.
Первый блок 20 и, следовательно, контроллер 16 крутящего момента выполнены с возможностью определять оптимальную скорость ω0 колеса и/или максимальное сцепление µest на основе скорости v железнодорожного транспортного средства, скорости ω вращения колеса и рассчитанного крутящего момента Test, полученного от контроллера 7 двигателя.
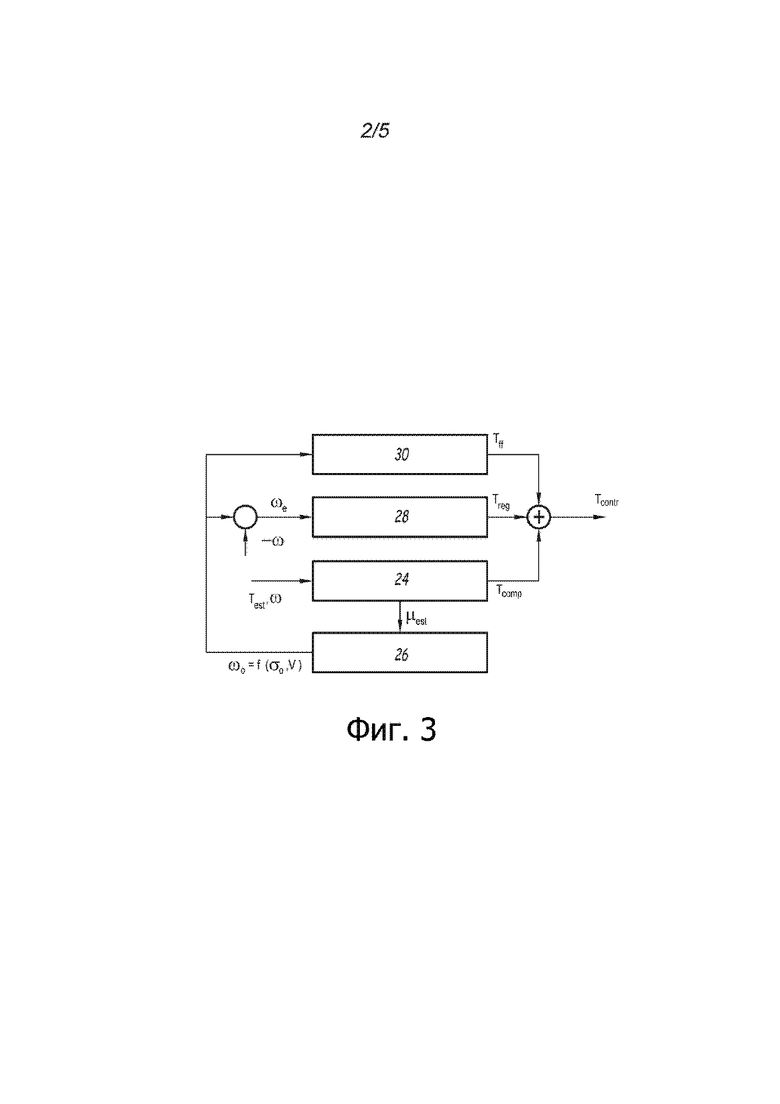
На фиг. 3 показана блок-схема различных компонентов, выполненных в контроллере 16 крутящего момента.
В блоке 24 реализован линейный фильтр для оценки максимального сцепления µest и для вычисления крутящего момента Tcomp.
Например, линейный фильтр использует Тest и скорость ω вращения колеса для расчета оценки максимального сцепления µest. В варианте осуществления для этой цели применяют фильтр Калмана.
Фильтр приспособлен для расчета кривой сцепления. Например, для этого используют кривую сцепления, как описано в статье "Adaptive nonlinear control of braking in railway vehicles" Капорале (Caporale) и др., "52-nd Conference on Decision and Control", 10-13 декабря 2013 г., Флоренция, Италия.
Кривую сцепления рассчитывают на основе следующего уравнения:
Уравнение (1),
где - вектор независимых переменных в регрессии, а - вектор параметров. Другими словами, очевидно, что θ1=a, θ2=b и θ3=c.Уравнение (1) предоставляет упрощенную модель с тремя параметрами, и ее используют для оценки максимального сцепления в блоке 24. Это функция продольной пробуксовки σ и трех параметров a, b и c. На фиг. 4 показаны кривые в соответствии с уравнением (1) по сравнению с моделью, представленной Полачом (Polach) в статье "Creep forces in simulations of traction vehicles on adhesion limit", WEAR 258, pp. 992-1000, 2005, издательство "Elservier".
Кривые, вычисленные в соответствии с работой Полача, являются сплошными, в то время как кривые, полученные в соответствии с вышеприведенным уравнением, являются пунктирными. Кривые приведены для нескольких скоростей железнодорожного транспорта, в данном случае для нескольких скоростей трамвая. Следует отметить, что левая часть кривой сцепления, где расположен пик, является достаточно точной, в то время как в правой части по меньшей мере знак производной от подогнанной кривой соответствует модели.
По сравнению с более сложной оценкой по Полачу параметры в соответствии с уравнением (1) вычисляются более просто, в частности, в режиме реального времени. Другими словами, три параметра a, b и c способны описывать все виды поведения, с которыми можно столкнуться в реальных поездах.
В соответствии с вариантом осуществления фильтр 24 реализован в блоке 20 на фиг. 2.
В соответствии с вариантом осуществления адаптивное управление с линейной фильтрацией строят на кривых сцепления в соответствии с уравнением (1) и их параметризацией. Таким образом, возможно, что блок 20 приспособлен для вычисления и/или отслеживания точки максимального сцепления µest. Другими словами, крутящий момент, вычисленный контроллером 7 двигателя, используют для вычисления коэффициента µest сцепления, в частности, с соответствующим фильтром. Исходя из этой информации, вычисляют выходной крутящий момент Tcontr, который должен быть применен контроллером 7 двигателя.
Кроме того, на фиг. 3 показан второй фильтр 26, выполненный с возможностью определения оптимальной пробуксовки σ0 на основе максимального коэффициента сцепления µest. Например, для этого можно использовать фильтр наименьших квадратов для подгонки кривой. Используя скорость транспортного средства и оптимальную пробуксовку σ0, можно рассчитать оптимальную скорость ω0 вращения колеса. В соответствии с вариантом осуществления второй фильтр 26 реализован в блоке 20 на фиг. 2.
На фиг. 3 показан элемент управления 28, например, PI-регулятор (пропорционально-интегральный регулятор), для отслеживания эталонных значений. Регулятор 28 использует в качестве входного сигнала сигнал ошибки скорости ωe вращения колеса. Сигнал ошибки ωe рассчитывают на основе разности между оптимальной скоростью ω0 вращения и фактической скоростью ω вращения колеса. В других вариантах осуществления также могут использоваться другие элементы управления, в частности элементы управления с обратной связью, например, ПИД-регулятор (пропорционально-интегрально-дифференциальный регулятор).
В варианте осуществления, который может быть объединен с другими описанными здесь вариантами осуществления, регулятор 28 реализован в блоке 22 на фиг. 2.
Регулятор 28 предоставляет в качестве выходного сигнала регулируемый крутящий момент Treg.
Наконец, на фиг. 3 показан дополнительный элемент 30 управления с прямой связью для работы с прямой связью. Элемент 30 управления с прямой связью используют для обеспечения динамической регулировки управляющего крутящего момента Tcontr на основе знаний о процессе в форме математической модели. В примере используют эталонную оптимальную скорость ω0 вращения и ее производную в качестве входных данных (не показано на фиг. 3). Выходной сигнал элемента управления с прямой связью представляет собой момент Tff прямой обратной связи.
В соответствии с вариантом осуществления крутящий момент Tcomp, предоставляемый первым (линейным) фильтром 24, выходной крутящий момент Treg, предоставляемый регулятором 28, и, как вариант, крутящий момент Tff прямой обратной связи складывают для вычисления управляющего крутящего момента Tcontr.
В соответствии с вариантами осуществления управляющий крутящий момент Tcontr демонстрирует уменьшенные колебания, что дает преимущества с точки зрения механического износа компонентов.
Таким образом, в соответствии с изобретением оценивают оптимальное значение для скорости ω0 вращения колеса. С использованием оптимальной скорости ω0 вращения колеса контур управления крутящим моментом становится замкнутым.
В соответствии с вариантом осуществления оптимальная скорость ω0 вращения колеса и/или максимальный коэффициент µest сцепления обновляют в режиме реального времени. Поэтому, всегда используют точную эталонную скорость вращения колеса, и контроллер 16 крутящего момента предотвращает колебания крутящего момента. Как правило, относительное скольжение или пробуксовка ограничена в пределах нескольких процентов, так что механическое напряжение компонентов трансмиссии, например, крутильные колебания колесной пары и, как следствие, затраты на техническое обслуживание, уменьшаются, при этом увеличивается срок службы колеса.
На фиг. 5 на графике A) схематично показана кривая крутящих моментов, и на графике B) схематично показана кривая скорости поезда и скорости колеса. Как видно, управляющий крутящий момент Tcontr, рассчитанный крутящий момент Test и реальный крутящий момент Tmotor двигателя очень близки друг к другу или даже почти идентичны. Кроме того, они не демонстрируют сильных изменений. Более того, как видно из графика B), на котором показана скорость veltrain движения поезда и скорость velwheel вращения колеса, скорость velwheel вращения колеса не демонстрирует больших изменений.
Таким образом, изобретение позволяет оценивать мгновенное значение коэффициента трения колесо/рельс и, таким образом, оценивать фактическую силу вращения колес, которую может использовать железнодорожное транспортное средство, чтобы соответственно обновлять эталонный крутящий момент, задаваемый контроллерами 7, 9, 16, в частности, независимо от оси.
В соответствии с изобретением можно обеспечить максимальное тяговое и/или тормозное усилие при любых условиях эксплуатации, например, при различных характеристиках сцепления с рельсом. Крутящий момент, оцененный контроллером 7 двигателя, используют для оценки оптимальной используемой силы вращения колес и для соответствующего обновления крутящего момента Tcontr.
В соответствии с изобретением предлагаемое устройство управления крутящим моментом или ABC-устройство способно на основании измерений оценивать текущие условия рельсов и предоставляет эталонный профиль крутящего момента, максимально приближенный к его оптимальному значению. Кроме того, в соответствии с изобретением, когда оценивают оптимальную скорость вращения колеса, контур управления крутящим моментом становится замкнутым, а результирующий крутящий момент становится менее подвержен колебаниям. Более того, при тяге пройденное расстояние увеличивается, а при торможении тормозное расстояние уменьшается.
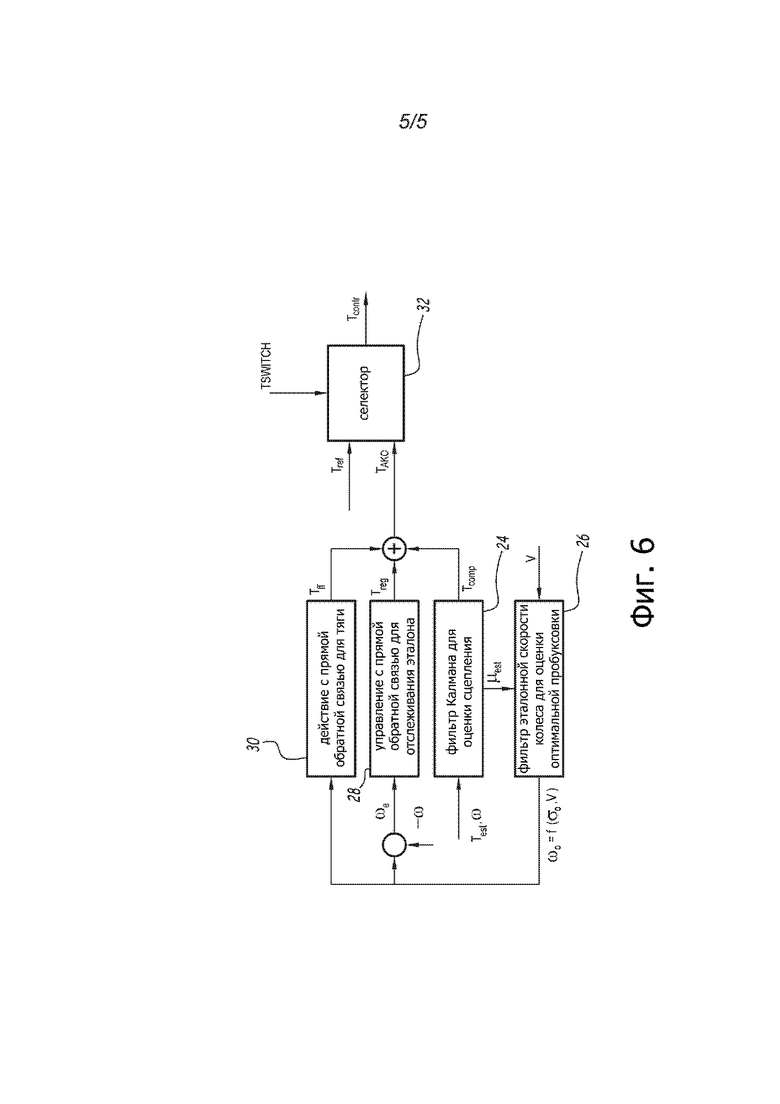
На фиг. 6 показана блок-схема определения эталонного крутящего момента в соответствии с вариантом осуществления, и она включает в себя больше информации по сравнению с вариантом осуществления, показанным на фиг. 3. Одинаковые ссылочные позиции использованы для одинаковых функций. Таким образом, в целом описание фиг. 3 также применимо к фиг. 6.
На фиг. 6 в дополнение к фиг. 3 показано первое устройство 32 выбора, которое уже было описано со ссылкой на фиг. 3, в зависимости от значения контроллеру 7 двигателя в качестве Tcontr передают либо крутящий момент TAKO, либо запрос Tref крутящего момента, требуемого машинистом. Крутящий момент Tcomp, предоставляемый первым (линейным) фильтром 24, выходной крутящий момент Treg, предоставляемый регулятором 28, и, как вариант, крутящий момент Tff прямой обратной связи складывают для вычисления управляющего крутящего момента TAKO.
В блоке 26 скорость транспортного средства обозначена через v. Например, как было объяснено выше, скорость v железнодорожного транспортного средства определяют с использованием датчика скорости или ABC-устройства.
На фиг. 3, а также на фиг. 6, Tcont или TAKO, в частности, вычисляемые из комбинации крутящего момента Tcomp, предоставляемого первым (линейным) фильтром 24, выходного крутящего момента Treg, предоставляемым регулятором 28, и, как вариант, крутящего момента Tff прямой обратной связи, предоставляют в качестве эталонного крутящего момента контроллеру 7 двигателя, перекрывая запрос крутящего момента Tref в случае обнаружения скольжения или пробуксовки, например, если разность между тангенциальной скоростью колеса и скоростью железнодорожного транспортного средства превышает заданное пороговое значение. Например, в случае обнаружения проскальзывания или пробуксовки значение TSWITCH может быть равно 1. В противном случае значение TSWITCH равно 0. В случае если значение TSWITCH равно 0, запрос Tref крутящего момента передают в качестве Tcontr в контроллер 7 двигателя. В противном случае, если значение TSWITCH равно 1, на контроллер 7 двигателя в качестве Tcontr передают значение Tcontr (на фиг. 3) или TAKO (на фиг. 6).
В соответствии с вариантом осуществления Tcomp может быть вычислено следующим образом, в частности в блоке 24:
 Уравнение (2),
Уравнение (2),
где R - радиус колеса, M - масса оси, g - ускорение силы тяжести, τ - передаточное число трансмиссии двигателя, а μest - оцененное текущее сцепление.
В соответствии с вариантом осуществления фильтр Калмана используют для оценки текущего доступного сцепления, в частности, в режиме реального времени, например, в блоке 24, на основе оценки крутящего момента Test двигателя, приложенного к колесу, и скорости ω вращения колеса.
В соответствии с вариантами осуществления вектор θ оценивают с использованием адаптивного расширения фильтра Калмана (например, адаптивного фильтра H на бесконечности (H∝)). Текущее доступное сцепление µest используют адаптивным расширением фильтра Калмана в качестве основы для оценки параметров θ1 = a, θ2 = b и θ3 = c уравнения (1), упрощенной модели сцепления, в частности, в блоке 26.
В варианте осуществления адаптивный фильтр H на бесконечности, который может представлять собой рекурсивный фильтр, обеспечивает устойчивое ослабление отношения ошибка/шум. В одном примере фильтрация была расширена за счет включения ограничений естественной положительности параметров (например, параметры a, b, c должны быть больше 0) вместе с другими выпуклыми ограничениями, обеспечивающими практическую выполнимость оптимальной пробуксовки σ0, которая должна попадать в заданный интервал, входящий в (0, k), при k < 1, интервал, который может быть приспособлен в соответствии с условиями эксплуатации, например, скоростью транспортного средства. Оптимальная пробуксовка σ0 является эталоном контура управления, который обеспечивает максимальное пригодное для использования сцепление µ, см. фиг. 4.
Например, параметры (например, параметры a, b, c) кривой, подлежащей оценке, ограничены таким образом, чтобы заставить σ0 принадлежать настраиваемому подинтервалу (0,1). Оптимальная пробуксовка σ0 соответствует максимальному сцеплению на кривой в соответствии с уравнением (1). Другими словами, максимальную точку сцепления вычисляют на основе фактической скорости транспортного средства и, в частности, косвенно, на основе скорости вращения колеса и рассчитанного крутящего момента Test в блоке 24.
Оцененную оптимальную пробуксовку σ0 и фактическую скорость используют для вычисления эталонной оптимальной скорости ω0 вращения, которую затем используют для контура управления скоростью вращения, который, наконец, указывает двигателю крутящий момент, который предназначен для использования максимально доступного сцепления, см. фиг. 6. Например, оптимальная эталонная скорость ω0 может быть рассчитана следующим образом:
Если имеет место тяга, например, если значение TBSWITCH больше или равно нулю,
 Уравнение (3)
Уравнение (3)
где ω0 - оптимальная эталонная скорость, R - радиус колеса, v - фактическая скорость железнодорожного транспортного средства и σ0 - оптимальная пробуксовка.
При торможении, например, если значение TBSWITCH ниже нуля,
 Уравнение (4)
Уравнение (4)
где ω0 - оптимальная эталонная скорость, R - радиус колеса, v - фактическая скорость железнодорожного транспортного средства и σ0 - оптимальная пробуксовка.
В соответствии с вариантами осуществления, цель настоящего изобретения заключается в том, чтобы предложить оценку в режиме реального времени сцепления колеса с рельсом для повышения эффективности противодействия скольжению/пробуксовке посредством адаптации значения (Tcontr) эталонного крутящего момента двигателя к фактическим условиям сцепления. Дополнительный эффект состоит в том, чтобы предоставить эталонный крутящий момент, который изменяется медленно, предотвращая возбуждение механического резонанса трансмиссии.
Результирующий крутящий момент двигателя является плавным и позволяет отслеживать максимальное сцепление при одновременном снижении усталостного напряжения на оси колеса.
Группа изобретений относится к управлению тяговой системой транспортных средств с электротягой. Способ управления железнодорожным транспортным средством заключается в том, что определяют фактическую скорость железнодорожного транспортного средства, определяют фактическую скорость вращения колеса железнодорожного транспортного средства, получают расчетный крутящий момент от контроллера двигателя, оценивают максимальный коэффициент сцепления, определяют эталонный крутящий момент и предоставляют эталонный крутящий момент контроллеру двигателя. При этом максимальный коэффициент сцепления оценивают на основе скорости вращения колеса, фактической скорости железнодорожного транспортного средства и расчетного крутящего момента. Эталонный крутящий момент определяют посредством суммирования крутящего момента, рассчитанного из оцененного коэффициента сцепления, и выходного крутящего момента, предоставляемого при управлении с обратной связью. Также заявлены контроллер крутящего момента, железнодорожное транспортное средство и процессор. Технический результат заключается в предотвращении возбуждения возможного резонанса трансмиссий. 4 н. и 8 з.п. ф-лы, 6 ил.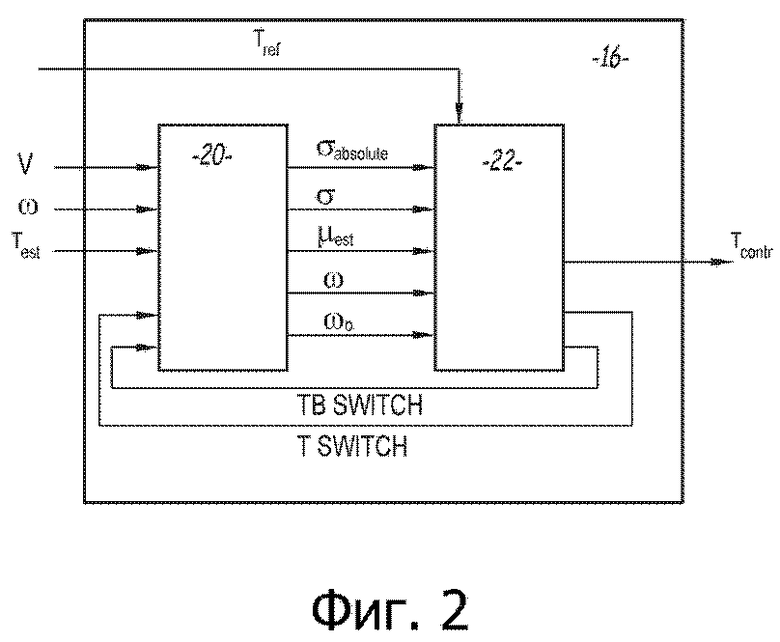
1. Способ управления железнодорожным транспортным средством, содержащим контроллер двигателя для электрической машины, воздействующей по меньшей мере на одно колесо железнодорожного транспортного средства, характеризующийся тем, что
определяют фактическую скорость железнодорожного транспортного средства;
определяют фактическую скорость вращения колеса железнодорожного транспортного средства;
получают расчетный крутящий момент от контроллера двигателя;
оценивают максимальный коэффициент сцепления на основе скорости вращения колеса, фактической скорости железнодорожного транспортного средства и расчетного крутящего момента, полученного от контроллера двигателя, при этом для оценки максимального коэффициента (µest) сцепления используют линейный фильтр;
определяют эталонный крутящий момент посредством суммирования крутящего момента, рассчитанного из оцененного коэффициента сцепления, и выходного крутящего момента, предоставляемого при управлении с обратной связью, при этом при управлении с обратной связью используют разницу между оптимальной скоростью вращения колеса и фактической скоростью вращения колеса, причем оптимальную скорость вращения колеса определяют на основе максимального коэффициента сцепления; и
предоставляют эталонный крутящий момент контроллеру двигателя.
2. Способ по п. 1, в котором главный контроллер получает данные от машиниста железнодорожного транспортного средства и/или системы безопасности поезда.
3. Способ по п. 1 или 2, в котором линейный фильтр представляет собой фильтр Калмана.
4. Способ по любому из предыдущих пунктов, в котором электрическую машину используют для ускорения или замедления железнодорожного транспортного средства.
5. Способ по любому из предыдущих пунктов, в котором расчетный крутящий момент основан на напряжении, измеренном на входе инвертора, и/или на фазовых токах электрической машины.
6. Способ по любому из предыдущих пунктов, в котором для оценки максимального сцепления применяют модель с тремя параметрами, в частности, с использованием следующего уравнения:
 ,
,
где  - вектор независимых переменных в регрессии, и
- вектор независимых переменных в регрессии, и  - вектор параметров, μ – сцепление, а σ – пробуксовка.
- вектор параметров, μ – сцепление, а σ – пробуксовка.
7. Способ по любому из предыдущих пунктов, в котором эталонный крутящий момент вычисляют отдельно для каждой моторизованной оси.
8. Способ по любому из предыдущих пунктов, в котором электрическая машина представляет собой электрическую машину с постоянными магнитами или асинхронный двигатель.
9. Способ по любому из предшествующих пунктов, в котором в управлении с обратной связью используют PI- или PID-регулятор.
10. Контроллер крутящего момента для железнодорожного транспортного средства, содержащего контроллер двигателя для электрической машины, воздействующей по меньшей мере на одно колесо железнодорожного транспортного средства, причем контроллер крутящего момента выполнен с возможностью
получать или оценивать фактическую скорость железнодорожного транспортного средства;
получать фактическую скорость вращения колеса железнодорожного транспортного средства;
получать расчетный крутящий момент от контроллера двигателя;
оценивать максимальный коэффициент сцепления на основе скорости вращения колеса, фактической скорости железнодорожного транспортного средства и расчетного крутящего момента, полученного от контроллера двигателя, при этом для оценки максимального коэффициента (μest) сцепления используется линейный фильтр;
определять эталонный крутящий момент посредством суммирования крутящего момента, рассчитанного из оцененного коэффициента сцепления, и выходного крутящего момента, предоставляемого при управлении с обратной связью, при этом при управлении с обратной связью используется разница между оптимальной скоростью вращения колеса и фактической скоростью вращения колеса, причем оптимальная скорость вращения колеса определяется на основе максимального коэффициента сцепления; и
отправлять эталонный крутящий момент на контроллер двигателя.
11. Железнодорожное транспортное средство, содержащее контроллер двигателя для электрической машины, воздействующей по меньшей мере на одно колесо железнодорожного транспортного средства, множество колес, один или несколько датчиков (14) колес для определения скорости вращения колес, при этом железнодорожное транспортное средство содержит контроллер крутящего момента по п. 10.
12. Процессор, выполняющий компьютерную программу, содержащую команды, которые при выполнении процессором реализуют этапы способа по одному из пп. 1-9.
| WO 2017175119 A1, 12.10.2017 | |||
| СПОСОБ ГИБРИДНОЙ ЛАЗЕРНО-ДУГОВОЙ СВАРКИ СТАЛЬНЫХ ТРУБ С НАРУЖНЫМ ПЛАКИРУЮЩИМ СЛОЕМ | 2018 |
|
RU2684735C1 |
| СПОСОБ И СИСТЕМА ПОВЫШЕНИЯ КПД ПОДВИЖНОГО СОСТАВА | 2014 |
|
RU2612459C2 |
| САМООКРАШИВАЮЩИЙСЯ ШТЕМПЕЛЬ | 2014 |
|
RU2636557C2 |

