Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления для электрического транспортного средства и к устройству управления для электрического транспортного средства.
Уровень техники
[0002] С точки зрения электрического транспортного средства, которое может приводиться в движение посредством использования крутящего момента от электрического мотора, традиционно известно устройство управления электрического транспортного средства для уменьшения вибраций транспортного средства посредством управления с обратной связью с использованием частоты вращения мотора и частоты вращения ведущих колес (см. JP 2002-152916 А). Устройство управления электрического транспортного средства уменьшает вибрации, вызываемые вследствие изменения крутящего момента и т.п.транспортного средства таким образом, что значение коррекции вычисляется посредством умножения заданного усиления и отклонения между средней частотой вращения ведущих колес и эквивалентной частотой вращения, полученной посредством преобразования частоты вращения мотора таким образом, что она соответствует частоте вращения ведущих колес, и крутящий момент мотора управляется согласно значению, полученному посредством вычитания значения коррекции из значения команды управления крутящим моментом мотора.
Раскрытие изобретения
[0003] Между тем, в случае, если транспортное средство ускоряется из движения накатом или замедления, период мертвой зоны, в течение которого крутящий момент приводного мотора не передается в крутящий момент ведущего вала транспортного средства, формируется вследствие зазора шестерней.
[0004] В этом отношении, в технологии, раскрытой в JP 2002-152916 А, толчок, вызываемый, когда шестерни вводятся в зацепление снова, ограничивается таким образом, что крутящий момент приводного мотора задается равным нулю в период мертвой зоны, и крутящий момент приводного мотора увеличивается в то время, когда шестерни вводятся в зацепление снова.
[0005] Тем не менее, в случае если транспортное средство медленно ускоряется из движения накатом или замедления, наклон возрастания значения команды управления крутящим моментом мотора становится небольшим, так что время, когда шестерни вводятся в зацепление снова, задерживается, и период мертвой зоны становится большим. С учетом этого, в технологии, раскрытой в патентном документе 1, в котором крутящий момент приводного мотора увеличивается в то время, когда шестерни вводятся в зацепление, время, когда крутящий момент повышается, также задерживается вследствие задержки времени, когда шестерни вводятся в зацепление, что вызывает такую проблему, что отклик крутящего момента ведущего вала относительно команды управления крутящим моментом приводного мотора задерживается.
[0006] Задача настоящего изобретения состоит в создании технологии, которая может ускорять отклик крутящего момента ведущего вала в зоне зазора в шестернях даже в случае, если транспортное средство медленно ускоряется из движения накатом или замедления.
Средство решения задачи
[0007] Способ управления для электрического транспортного средства настоящего изобретения представляет собой способ управления для электрического транспортного средства, который выполнен с возможностью управления крутящим моментом мотора на основании значения команды управления конечным крутящим моментом посредством вычисления значения команды управления конечным крутящим моментом таким образом, что управление демпфированием вибрации для уменьшения вибраций системы трансмиссии для передачи движущей силы транспортного средства выполняется для значения команды управления целевым крутящим моментом, заданного на основании информации о транспортном средстве, и включает в себя: вычисление значения команды управления конечным крутящим моментом на основании значения команды управления целевым крутящим моментом и значения, полученного посредством умножения угловой скорости кручения ведущего вала на усиление обратной связи; и оценку, посредством использования модели транспортного средства, которая моделирует систему трансмиссии для передачи движущей силы, периода мертвой зоны, в течение которого крутящий момент мотора, выводимый из мотора, не передается в крутящий момент ведущего вала транспортного средства. Различные значения в качестве усиления обратной связи задаются отдельно для периода мертвой зоны и для периода, в течение которого крутящий момент мотора передается в крутящий момент ведущего вала транспортного средства.
Краткое описание чертежей
[0008] Фиг.1 является блок-схемой, иллюстрирующей основную конфигурацию электрического транспортного средства, включающего в себя устройство управления для электрического транспортного средства в первом варианте осуществления.
Фиг.2 является блок-схемой, иллюстрирующей процедуру процесса, который должен выполняться посредством контроллера мотора.
Фиг.3 является видом, иллюстрирующим пример таблицы «положение акселератора - крутящий момент».
Фиг.4 является блок-схемой управления для реализации процесса вычисления для управления демпфированием вибрации в первом варианте осуществления.
Фиг.5 является блок-схемой управления для описания подробностей модуля оценки моделей транспортного средства/периодов мертвой зоны, проиллюстрированного на фиг.4.
Фиг.6 является видом, моделирующим систему трансмиссии для передачи движущей силы транспортного средства.
Фиг.7 является блок-схемой управления для описания подробностей модуля F/B-вычисления угловой скорости кручения ведущего вала, проиллюстрированного на фиг.4.
Фиг.8 является блок-схемой управления для реализации процесса вычисления для управления демпфированием вибрации во втором варианте осуществления.
Фиг.9 является видом для описания подробностей модуля F/F-компенсации, проиллюстрированного на фиг.8.
Фиг.10 является видом для описания подробностей модуля F/B-компенсации, проиллюстрированного на фиг.8.
Фиг.11 является видом для описания подробностей модуля F/F-компенсации в третьем варианте осуществления.
Фиг.12 является видом для описания результатов управления посредством соответствующих устройств управления для электрического транспортного средства первого-третьего вариантов осуществления.
Фиг.13 является блок-схемой, иллюстрирующей процедуру процесса, который должен выполняться посредством контроллера мотора.
Фиг.14 является видом, иллюстрирующим один пример таблицы «положение акселератора - крутящий момент».
Фиг.15 является блок-схемой управления для реализации процесса управления остановкой.
Фиг.16 является блок-схемой управления для описания подробностей модуля задания крутящего F/B-момента по частоте вращения мотора.
Фиг.17 является блок-схемой управления для описания подробностей модуля оценки возмущающего крутящего момента.
Фиг.18 является блок-схемой для задания флага FLG определения управления остановкой.
Фиг.19 является временной диаграммой для описания результата управления посредством устройства управления для электрического транспортного средства четвертого варианта осуществления.
Осуществление изобретения
[0009] Первый вариант осуществления
Фиг.1 является блок-схемой, иллюстрирующей основную конфигурацию электрического транспортного средства, включающего в себя устройство управления для электрического транспортного средства в первом варианте осуществления. Электрическое транспортное средство представляет собой автомобиль, включающий в себя электромотор в качестве части или всего источника приведения в движение для транспортного средства и допускающий движение посредством движущей силы электромотора, и электрическое транспортное средство включает в себя электрический автомобиль и гибридный автомобиль.
[0010] Сигналы, указывающие состояния транспортного средства, такие как скорость V транспортного средства, положение акселератора (степень открытия акселератора), фаза ротора электромотора 4, углы вращения ведущих колес для ведущих колес 9a, 9b и токи iu, iv, iw электромотора 4, вводятся в контроллер 2 мотора в качестве цифровых сигналов. Контроллер 2 мотора формирует PWM-сигнал для управления электромотором 4 на основании входных сигналов. Кроме того, контроллер 2 мотора формирует сигнал приведения в действие инвертора 3 согласно такому сформированному PWM-сигналу. Следует отметить, что контроллер 2 мотора функционирует в качестве модуля вычисления значений команд управления конечным крутящим моментом для вычисления значения команды управления конечным крутящим моментом (описан ниже) и модуль оценки периодов мертвой зоны для оценки периода мертвой зоны.
[0011] Инвертор 3 включает/отключает два переключающих элемента (например, силовые полупроводниковые элементы, такие как IGBT или MOSFET), предусмотренные для каждой фазы, с тем чтобы преобразовывать постоянный ток, подаваемый из аккумулятора 1, в переменный ток, так что требуемый ток протекает в мотор 4.
[0012] Электромотор 4 (мотор трехфазного переменного тока) (далее называемый просто «мотором 4») формирует движущую силу посредством переменного тока, подаваемого из инвертора 3, с тем чтобы передавать движущую силу на правое и левое ведущие колеса 9a, 9b через редуктор 5 и ведущий вал 8. Кроме того, когда электромотор 4 вращается согласно ведущим колесам 9a, 9b во время движения транспортного средства, электромотор 4 формирует движущую силу рекуперации таким образом, что электромотор 4 восстанавливает кинетическую энергию транспортного средства в качестве электрической энергии. В этом случае, инвертор 3 преобразует переменный ток, сформированный во время работы в рекуперативном режиме мотора 4, в постоянный ток и подает его в аккумулятор 1.
[0013] Датчик 7 тока определяет трехфазные переменные токи iu, iv, iw, протекающие через мотор 4. Следует отметить, что поскольку сумма трехфазных переменных токов iu, iv, iw равна 0, токи любых двух фаз могут определяться, и ток оставшейся одной фазы может получаться посредством вычисления.
[0014] Датчик 6 вращения, например, представляет собой круговой датчик положения или датчик положения и определяет фазу ротора мотора 4.
[0015] Датчики 10a, 10b частоты вращения колес представляют собой, например, датчики положения,и соединены с правым и левым ведущими колесами 9a, 9b, соответственно, с тем чтобы определять углы вращения ведущих колес 9a, 9b.
[0016] Фиг.2 является блок-схемой, иллюстрирующей процедуру процесса, программируемого с возможностью выполнения посредством контроллера 2 мотора. Процессы этапов S201-S205 регулярно выполняются с регулярными интервалами в то время, когда система транспортного средства активируется.
[0017] На этапе S201, сигналы, указывающие состояния транспортного средства, вводятся в контроллер 2 мотора. В данном документе, вводятся скорость V транспортного средства (км/ч), положение акселератора (%), фаза ротора (рад) мотора 4, углы вращения ведущих колес (рад) для ведущих колес 9a, 9b, частота Nm вращения (об/мин) мотора 4, трехфазные переменные токи iu, iv, iw, протекающие в моторе 4, и значение Vdc постоянного напряжения (В) аккумулятора 1.
[0018] Скорость V транспортного средства (км/ч) получается из датчика скорости транспортного средства (не показан) или другого контроллера через связь. В качестве альтернативы, контроллер 2 мотора находит скорость V транспортного средства (км/ч) таким образом, что скорость v транспортного средства (м/с) находится посредством умножения механической угловой скорости ωm ротора на динамический радиус r шины и затем делится на передаточное отношение главной шестерни, и после этого такая найденная скорость v транспортного средства (м/с) умножается на 3600/1000, с тем чтобы преобразовывать ее единицы.
[0019] Положение акселератора (%) получается из датчика положения акселератора (не показан) или получается из другого контроллера, такого как контроллер транспортного средства (не показан) через связь.
[0020] Фаза ротора (рад) электромотора 4 получается из датчика 6 вращения. Частота Nm вращения (об/мин) мотора 4 находится таким образом, что угловая скорость ωm вращателя (электрический угол) делится на номер p полюсной пары мотора 4 для получения значения ωm определения угловой скорости вращения мотора (рад/с), которое представляет собой механическую угловую скорость мотора 4, и такое найденное значение ωm определения угловой скорости вращения мотора умножается на 60/(2π). Угловая скорость вращателя находится посредством дифференцирования фазы вращателя.
[0021] Углы вращения ведущих колес (рад) для ведущих колес 9a, 9b получаются из датчиков 10a, 10b частоты вращения колес.Угол θw вращения ведущих колес (рад), используемый в процессе вычисления для управления демпфированием вибрации (описан ниже), находится из среднего значения значений, определенных посредством датчиков 10a, 10b частоты вращения колес, соединенных с правым и левым ведущими колесами 9a, 9b. Кроме того, контроллер 2 мотора дифференцирует угол θw вращения ведущих колес, с тем чтобы вычислять угловую скорость ωw вращения ведущих колес (рад/с).
[0022] Токи iu, iv и iw(а), протекающие через мотор 4, получаются из датчика 7 тока.
[0023] Значение Vdc постоянного напряжения (В) определяется посредством датчика напряжения (не показан), предусмотренного в линии источника мощности постоянного тока между аккумулятором 1 и инвертором 3. Следует отметить, что значение Vdc постоянного напряжения (В) может определяться из сигнала, передаваемого из контроллера аккумулятора (не показан).
[0024] На этапе S202, контроллер 2 мотора задает значение Tm* команды управления целевым крутящим моментом в качестве базового целевого крутящего момента. Более конкретно, контроллер 2 мотора задает значение Tm* команды управления целевым крутящим моментом посредством обращения к таблице «положение акселератора - крутящий момент», проиллюстрированной на фиг.3, на основании положения акселератора и скорости V транспортного средства, вводимых на этапе S201. Следует отметить, что таблица «положение акселератора - крутящий момент» представляет собой один пример и не ограничена таблицей, проиллюстрированной на фиг.3.
[0025] На этапе S203, выполняется процесс вычисления для управления демпфированием вибрации. Более конкретно, значение Tmf* команды управления конечным крутящим моментом, которое уменьшает вибрации системы трансмиссии для передачи движущей силы (крутильные вибрации и т.п. ведущего вала 8), задается без ухудшения отклика крутящего момента ведущего вала, на основании значения Tm* команды управления целевым крутящим моментом, заданного на этапе S202, угловой скорости кручения ведущего вала и оцененного значения угла кручения ведущего вала в качестве значения определения периода мертвой зоны. Ниже описаны подробности процесса вычисления для управления демпфированием вибрации для задания значения Tmf* команды управления конечным крутящим моментом.
[0026] На этапе S204, целевое значение id* тока d-оси и целевое значение iq* тока q-оси находятся на основании значения Tmf* команды управления конечным крутящим моментом, вычисленного на этапе S203, значения ωm определения угловой скорости вращения мотора и значения Vdc постоянного напряжения. Например, таблица, задающая взаимосвязь целевого значения тока d-оси и целевого значения тока q-оси со значением команды управления крутящим моментом мотора, частотой вращения мотора и значением постоянного напряжения, подготавливается заранее, и целевое значение id* тока d-оси и целевое значение iq* тока q-оси находятся посредством обращения к этой таблице.
[0027] На этапе S205, управление по току выполняется таким образом, что ток id d-оси и ток iq d-оси достигают целевого значения id* тока d-оси и целевого значения iq* тока q-оси, найденных на этапе S204, соответственно. Для этой цели, ток id d-оси и ток iq d-оси сначала находятся на основании значений iu, iv, iw трехфазного переменного тока и фазы вращателя мотора 4, вводимых на этапе S201. Затем, значения vd, vq команд управления напряжением d-оси и q-оси вычисляются из отклонений между значениями id*, iq* команд управления током d-оси и q-оси и токами id, iq d-оси и q-оси. Следует отметить, что напряжение помехозащищенности, необходимое для уравновешивания напряжения помех между ортогональными осями координат d-q, может суммироваться с такими вычисленными значениями vd, vq команд управления напряжением d-оси и q-оси.
[0028] После этого, значения vu, vv, vw команд управления трехфазным переменным напряжением находятся из значений vd, vq команд управления напряжением d-оси и q-оси и фазы вращателя мотора 4. Затем PWM-сигналы tu (%), tv (%), tw (%) находятся из таких найденных значений vu, vv, vw команд управления трехфазным переменным напряжением и значения Vdc постоянного напряжения. Посредством размыкания и замыкания переключающих элементов инвертора 3 посредством PWM-сигналов tu, tv, tw, найденных таким способом, мотор 4 может приводиться в действие с требуемым крутящим моментом, инструктируемым посредством значения команды управления крутящим моментом.
[0029] Ниже описаны подробности процесса вычисления для управления демпфированием вибрации, выполняемого на этапе S203 в устройстве управления для электрического транспортного средства первого варианта осуществления.
[0030] Фиг.4 является блок-схемой для описания процесса вычисления для управления демпфированием вибрации в первом варианте осуществления. Посредством выполнения процесса вычисления для управления демпфированием вибрации для значения Tm* команды управления целевым крутящим моментом, задается значение Tmf* команды управления конечным крутящим моментом. Значение Tmf* команды управления конечным крутящим моментом вычисляется посредством использования модуля 401 оценки моделей транспортного средства/периодов мертвой зоны и модуля 402 F/B-вычисления угловой скорости кручения ведущего вала.
[0031] Модуль 401 оценки моделей транспортного средства/периодов мертвой зоны принимает значение Tm* команды управления целевым крутящим моментом и вычисляет оцененное значение угла кручения ведущего вала в качестве значения определения периода мертвой зоны, служащего в качестве показателя для определения того, находится ли система трансмиссии для передачи движущей силы транспортного средства в периоде мертвой зоны, и затем выводит оцененное значение угла кручения ведущего вала в модуль 402 F/B-вычисления угловой скорости кручения ведущего вала.
[0032] Модуль 402 F/B-вычисления угловой скорости кручения ведущего вала вычисляет значение Tmf* команды управления конечным крутящим моментом на основании значения Tm* команды управления целевым крутящим моментом, оцененного значения угла кручения ведущего вала и угловой скорости кручения ведущего вала, вычисленной из разности между угловой скоростью вращения ведущих колес и преобразованным значением ведущего вала угловой скорости вращения мотора.
[0033] Здесь, преобразованное значение ведущего вала вычисляется посредством деления угловой скорости вращения мотора на полное передаточное отношение N (далее называемое просто «передаточным отношением»). Следует отметить, что угловая скорость вращения мотора (рад/с) вычисляется посредством дифференцирования угла вращения мотора (рад), найденного посредством деления фазы ротора (электрического угла) (рад) на номер полюсной пары электромотора.
[0034] Фиг.5 является блок-схемой для описания подробностей модуля 401 оценки моделей транспортного средства/периодов мертвой зоны, проиллюстрированного на фиг.4. Модуль 401 оценки моделей транспортного средства/периодов мертвой зоны состоит из модуля 501 F/B-вычисления угловой скорости кручения ведущего вала и модели 502 транспортного средства. В модуле 401 оценки моделей транспортного средства/периодов мертвой зоны, значение команды управления целевым крутящим моментом вводится в модуль 501 F/B-вычисления угловой скорости кручения ведущего вала, и выходное значение модуля 501 F/B-вычисления угловой скорости кручения ведущего вала вводится в модель 502 транспортного средства. Настоящим, вычисляется оцененное значение θ^d угла кручения ведущего вала в качестве значения определения периода мертвой зоны.
[0035] Сначала будет более подробно описана модель 502 транспортного средства со ссылкой на фиг.6.
[0036] Фиг.6 является видом, моделирующим систему трансмиссии для передачи движущей силы транспортного средства, и параметры на чертеже являются такими, как описано ниже.
Jm - инерция мотора
Jw - инерция ведущих колес (для одного вала)
M - вес кузова транспортного средства
Kd - крутильная жесткость приводной системы
Kt - коэффициент, связанный с трением между шинами и поверхностью дороги
N - полное передаточное отношение
r - радиус нагрузки на шины
ωm - угловая скорость вращения мотора
θm - угол вращения мотора
ωw - угловая скорость вращения ведущих колес
θw - угол вращения ведущих колес
Tm - крутящий момент мотора
Td - крутящий момент ведущего вала
F - движущая сила (для двух валов)
V - скорость кузова транспортного средства
θd - угол кручения ведущего вала
Из фиг.6, уравнения движения транспортного средства могут выражаться посредством уравнений (1)-(6) следующим образом.
[0037] Математическая формула 1

[0038] Математическая формула 2

[0039] Математическая формула 3

[0040] Математическая формула 4

[0041] Математическая формула 5

[0042] Математическая формула 6

[0043] Уравнения (1)-(6) преобразуются посредством преобразования Лапласа, с тем чтобы находить передаточную характеристику от крутящего момента Tm мотора до частоты ωm вращения мотора, как выражается посредством уравнений (7), (8) следующим образом.
[0044] Математическая формула 7

[0045] Математическая формула 8

[0046] Следует отметить, что a3, a2, a1, a0, b3, b2, b1, b0 в уравнении (8) могут выражаться посредством уравнения (9) следующим образом.
[0047] Математическая формула 9

[0048] Кроме того, передаточная характеристика от крутящего момента Tm мотора до крутящего момента Td ведущего вала может выражаться посредством уравнения (10).
[0049] Математическая формула 10

[0050] Следует отметить, что c1, c2 в уравнении (10) могут выражаться посредством уравнения (11) следующим образом.
[0051] Математическая формула 11

[0052] Когда передаточная характеристика от частоты ωm вращения мотора до угловой скорости ωw вращения ведущих колес находится из уравнений (2), (4), (5), (6), она может выражаться посредством уравнения (12) следующим образом.
[0053] Математическая формула 12

[0054] Из уравнений (7), (8), (12), передаточная характеристика от крутящего момента Tm мотора до угловой скорости ωw вращения ведущих колес может выражаться посредством уравнения (13) следующим образом.
[0055] Математическая формула 13

[0056] Из уравнений (10), (13), передаточная характеристика от крутящего момента Td ведущего вала до угловой скорости ωw вращения ведущих колес может выражаться посредством уравнения (14) следующим образом.
[0057] Математическая формула 14

[0058] Здесь, когда уравнение (1) преобразуется, оно может выражаться посредством уравнения (15) следующим образом.
[0059] Математическая формула 15

[0060] Соответственно, из уравнений (14), (15), угловая скорость ωd кручения ведущего вала может выражаться посредством уравнения (16) следующим образом.
[0061] Математическая формула 16

[0062] Следует отметить, что Hw(s) в уравнении (16) могут выражаться посредством уравнения (17) следующим образом.
[0063] Математическая формула 17

[0064] Кроме того, v1, v0, w1, w0 в уравнении (17) выражаются посредством уравнения (18) следующим образом.
[0065] Математическая формула 18

[0066] Кроме того, уравнение (10) может преобразовываться в уравнение (19).
[0067] Математическая формула 19

[0068] Здесь, ζp в уравнении (19) указывает коэффициент затухания системы трансмиссии для передачи крутящего момента ведущего вала, и ωp указывает собственную частоту вибрации системы трансмиссии для передачи крутящего момента ведущего вала.
[0069] Кроме того, когда полюса и нулевые точки уравнения (19) анализируются, α≈c0/c1 находится, и посредством выполнения отмены нулей и полюсов, уравнение (20) находится следующим образом.
[0070] Математическая формула 20

[0071] Следует отметить, что gt в уравнении (20) может выражаться посредством уравнения (21) следующим образом.
[0072] Математическая формула 21

[0073] Здесь, значение Tmf* команды управления конечным крутящим моментом может выражаться посредством уравнения (22) следующим образом.
[0074] Математическая формула 22

[0075] Настоящим, значение Tmf* команды управления конечным крутящим моментом может заменяться в качестве уравнения (23), из уравнений (4), (6).
[0076] Математическая формула 23

[0077] После этого, когда уравнение (23) подставляется в уравнение (20) с крутящим моментом Tm мотора=значение Tmf* команды управления конечным крутящим моментом (Tm=Tmf*), уравнение (20) может компоноваться в качестве уравнения (24) следующим образом.
[0078] Математическая формула 24

[0079] Отклик модели от крутящего момента мотора до крутящего момента ведущего вала может выражаться посредством уравнения (25).
[0080] Математическая формула 25

[0081] Когда отклик модели предполагается как уравнение (25), условие, при котором передаточная характеристика от значения Tmf* команды управления конечным крутящим моментом до крутящего момента Td ведущего вала (уравнение (24)) становится идентичной отклику модели, выражается посредством уравнения (26) следующим образом.
[0082] Математическая формула 26
[0083] Здесь, ζr1 представляет собой коэффициент затухания отклика модели в период (область, отличную от периода мертвой зоны), в течение которого крутящий момент мотора передается в крутящий момент ведущего вала транспортного средства, и ζr2 представляет собой коэффициент затухания отклика модели в период мертвой зоны, в течение которого крутящий момент мотора не передается в крутящий момент ведущего вала транспортного средства. Коэффициенты затухания задаются таким образом, что они удовлетворяют ζr2<ζr1, так что отклик крутящего момента ведущего вала в период мертвой зоны быстрее отклика крутящего момента ведущего вала в области, отличной от периода мертвой зоны.
[0084] Модель 502 транспортного средства состоит из модели на основе мертвых зон, к которой уравнения (1)-(18) применяются таким образом, что моделируются параметры транспортного средства и зазор в шестернях от мотора 4 до ведущего вала 8. Крутящий момент Td ведущего вала, полученный с учетом модели на основе мертвых зон, выражается посредством уравнения (27).
[0085] Математическая формула 27

[0086] Здесь, θdead указывает общую величину зазора в шестернях от мотора до ведущего вала.
[0087] Модель 502 транспортного средства, конфигурированная так, как описано выше, может вычислять, на основании значения команды управления целевым крутящим моментом, оцененное значение θ^d угла кручения ведущего вала в качестве значения определения периода мертвой зоны, на основании которого можно определять, находится ли система трансмиссии для передачи движущей силы транспортного средства в период мертвой зоны.
[0088] Более конкретно, угол θd кручения ведущего вала, вычисленный на основании значения команды управления целевым крутящим моментом, сначала вводится в блок 503 определения мертвых зон, соответствующий модели на основе мертвых зон. Блок 503 определения мертвых зон выводит оцененное значение θ^d угла кручения ведущего вала в качестве значения определения периода мертвой зоны, вычисленного согласно значению входного угла θd кручения ведущего вала, на основании области (θd (θdead, -θdead/2<θd<θdead/2 и θd≤-θdead/2) для θd, показанного в уравнении (27). Следует отметить, что в настоящем варианте осуществления, значение оцененного значения θ^d угла кручения ведущего вала, выводимого из блока 503 определения мертвых зон, вычисляется на основании уравнения (27), так что значение принимает любое из θd-θdead/2, 0 и θd+θdead/2.
[0089] Кроме того, в настоящем варианте осуществления, когда оцененное значение угла кручения ведущего вала равно 0, определяется то, что состояние транспортного средства находится в период мертвой зоны, и когда оцененное значение угла кручения ведущего вала отличается от 0, определяется то, что состояние транспортного средства находится в области, отличной от периода мертвой зоны. Такое вычисленное оцененное значение угла кручения ведущего вала выводится в модуль 402 F/B-вычисления угловой скорости кручения ведущего вала, проиллюстрированный на фиг.4.
[0090] Подробности модели 502 транспортного средства описаны так, как указано выше. Ниже описан модуль 501 F/B-вычисления угловой скорости кручения ведущего вала.
[0091] Модуль 501 F/B-вычисления угловой скорости кручения ведущего вала включает в себя усиление 504 обратной связи (далее также называемое «F/B-усилением k1»), усиление 505 обратной связи (далее также называемое «F/B-усилением k2»), переключатель 506 усиления и модуль 507 вычитания. Модуль 501 F/B-вычисления угловой скорости кручения ведущего вала принимает значение команды управления целевым крутящим моментом, оцененное значение угла кручения ведущего вала и оцененное значение угловой скорости кручения ведущего вала и выводит вычисляемое значение в модель 502 транспортного средства.
[0092] Усиление 504 обратной связи принимает оцененное значение угловой скорости кручения ведущего вала и выводит, в переключатель 506 усиления, значение, вычисленное посредством умножения оцененного значения угловой скорости кручения ведущего вала на F/B-усиление k1, вычисленное из коэффициента ζr1 затухания для отклика модели в области, отличной от периода мертвой зоны, в уравнении (26).
[0093] Усиление 505 обратной связи принимает оцененное значение угловой скорости кручения ведущего вала и выводит, в переключатель 506 усиления, значение, вычисленное посредством умножения оцененного значения угловой скорости кручения ведущего вала на F/B-усиление k2, вычисленное из коэффициента ζr2 затухания для отклика модели в период мертвой зоны в уравнении (26).
[0094] Оцененное значение угла кручения ведущего вала в качестве значения определения периода мертвой зоны и соответствующие выводы из усилений 504 и 505 обратной связи вводятся в переключатель 506 усиления. На основании оцененного значения угла кручения ведущего вала, переключатель 506 усиления выводит любой из выводов из усилений 504 и 505 обратной связи в модуль 507 вычитания.
[0095] Здесь, в настоящем варианте осуществления, когда оцененное значение угла кручения ведущего вала равно 0, определяется то, что состояние транспортного средства находится в период мертвой зоны, и когда оцененное значение угла кручения ведущего вала отличается от 0, определяется то, что состояние транспортного средства находится в области, отличной от периода мертвой зоны. Соответственно, когда оцененное значение угла кручения ведущего вала отличается от 0, переключатель 506 усиления выводит результат вычисления усиления 504 обратной связи в модуль 507 вычитания, и когда оцененное значение угла кручения ведущего вала равно 0, переключатель 506 усиления выводит результат вычисления усиления 505 обратной связи в модуль 507 вычитания.
[0096] Модуль 507 вычитания вычитает выходное значение переключателя 506 усиления из значения команды управления целевым крутящим моментом и выводит вычисленное значение в модель 502 транспортного средства. Настоящим, значение, полученное посредством умножения оцененного значения угловой скорости кручения ведущего вала, возвращенного в модуль 501 F/B-вычисления угловой скорости кручения ведущего вала, на любое из соответствующих усилений, в которых коэффициенты ζr1, ζr2 затухания для периода мертвой зоны и для области, отличной от периода мертвой зоны, задаются отдельно, вычитается из значения команды управления целевым крутящим моментом, и результирующее значение выводится в модель 502 транспортного средства.
[0097] В модуле 401 оценки моделей транспортного средства/периодов мертвой зоны, сконфигурированном так, как описано выше, вычисляется оцененное значение угла кручения ведущего вала, на основании которого можно определять, находится ли система трансмиссии для передачи движущей силы транспортного средства в периоде мертвой зоны. Такое вычисленное оцененное значение угла кручения ведущего вала в модели 502 транспортного средства выводится в модуль 402 F/B-вычисления угловой скорости кручения ведущего вала.
[0098] Фиг.7 является блок-схемой управления для описания подробностей модуля 402 F/B-вычисления угловой скорости кручения ведущего вала первого варианта осуществления. Модуль 402 F/B-вычисления угловой скорости кручения ведущего вала включает в себя усиление 701 обратной связи (далее также называемое «F/B-усилением k1»), усиление 702 обратной связи (далее также называемое «F/B-усилением k2»), переключатель 703 усиления и модуль 704 вычитания. Модуль 402 F/B-вычисления угловой скорости кручения ведущего вала принимает значение команды управления целевым крутящим моментом, оцененное значение угла кручения ведущего вала и угловую скорость кручения ведущего вала и выводит значение Tmf* команды управления конечным крутящим моментом.
[0099] Усиление 701 обратной связи принимает угловую скорость кручения ведущего вала и выводит, в переключатель 703 усиления, значение, вычисленное посредством умножения угловой скорости кручения ведущего вала на F/B-усиление k1, вычисленное из коэффициента ζr1 затухания для отклика модели в области, отличной от периода мертвой зоны, в уравнении (26).
[0100] Усиление 702 обратной связи принимает угловую скорость кручения ведущего вала и выводит, в переключатель 703 усиления, значение, вычисленное посредством умножения угловой скорости кручения ведущего вала на F/B-усиление k2, вычисленное из коэффициента ζr2 затухания для отклика модели в период мертвой зоны в уравнении (26).
[0101] Оцененное значение угла кручения ведущего вала в качестве значения определения периода мертвой зоны и соответствующих выводов из усилений 701 и 702 обратной связи вводится в переключатель 703 усиления. На основании оцененного значения угла кручения ведущего вала переключатель 703 усиления выводит любой из выводов из усилений 701 и 702 обратной связи в модуль 704 вычитания.
[0102] Здесь, в настоящем варианте осуществления, когда оцененное значение угла кручения ведущего вала равно 0, определяется то, что состояние транспортного средства находится в период мертвой зоны, и когда оцененное значение угла кручения ведущего вала отличается от 0, определяется то, что состояние транспортного средства находится в области, отличной от периода мертвой зоны, как описано с точки зрения модуля 401 оценки моделей транспортного средства/периодов мертвой зоны. Соответственно, когда оцененное значение угла кручения ведущего вала отличается от 0, переключатель 703 усиления выводит результат вычисления усиления 701 обратной связи в модуль 704 вычитания, и когда оцененное значение угла кручения ведущего вала равно 0, переключатель 703 усиления выводит результат вычисления усиления 702 обратной связи в модуль 704 вычитания.
[0103] Модуль 704 вычитания вычитает выходное значение переключателя 703 усиления из значения команды управления целевым крутящим моментом таким образом, чтобы вычислять значение Tmf* команды управления конечным крутящим моментом.
[0104] При такой конфигурации оценивается, находится ли система трансмиссии для передачи движущей силы транспортного средства в периоде мертвой зоны, и усиление обратной связи в системе управления с обратной связью, используемое для вычисления для управления демпфированием вибрации, может регулироваться отдельно для случая, в котором состояние транспортного средства находится в период мертвой зоны, и для случая, в котором состояние транспортного средства находится в области, отличной от периода мертвой зоны, в силу этого позволяя ускорять только отклик крутящего момента ведущего вала в зоне зазора в шестернях.
[0105] Более конкретно, с помощью устройства управления для электрического транспортного средства первого варианта осуществления, оценивается, находится ли состояние транспортного средства в периоде мертвой зоны, и коэффициенты ζr1, ζr2 затухания могут задаваться отдельно для периода мертвой зоны и для области, отличной от периода мертвой зоны. Посредством задания усиления (K2) обратной связи для периода мертвой зоны меньше усиления (K1) обратной связи для области, отличной от периода мертвой зоны, отклик крутящего момента ведущего вала относительно значения команды управления крутящим моментом мотора в период мертвой зоны может ускоряться.
[0106] Здесь описан результат вычисления для управления демпфированием вибрации посредством устройства управления для электрического транспортного средства первого варианта осуществления со ссылкой на фиг.12.
[0107] Фиг.12 является видом сравнения результатов управления посредством устройства управления для электрического транспортного средства первого варианта осуществления и нижеуказанных второго и третьего вариантов осуществления с результатом управления посредством традиционной технологии. На чертеже, значение команды управления целевым крутящим моментом, значение команды управления конечным крутящим моментом и продольное ускорение транспортного средства показаны в этом порядке сверху. Следует отметить, что непрерывная линия на чертеже указывает результаты управления посредством первого-третьего вариантов осуществления, и линия с попеременными длинным и коротким тире указывает результат управления посредством традиционной технологии.
[0108] Результаты, показанные на фиг.12, представляют собой результаты управления в таком случае, в котором транспортное средство ускоряется посредством увеличения значения команды управления целевым крутящим моментом с небольшим уклоном из состояния, в котором которое транспортное средство замедляется посредством рекуперативного крутящего момента.
[0109] В традиционной технологии (линия с попеременными длинным и коротким тире), когда значение команды управления целевым крутящим моментом увеличивается с небольшим уклоном, продольное ускорение достигает 0 вследствие зазора в шестернях во время t1 и затем увеличивается снова во время t3, и в силу этого период мертвой зоны, в течение которого продольное ускорение равно 0, является большим. Это обусловлено тем, что в традиционной технологии, значение команды управления конечным крутящим моментом управляется с возможностью увеличения в то время, когда шестерни вводятся в зацепление.
[0110] В результате управления (непрерывная линия) посредством устройства управления для электрического транспортного средства первого варианта осуществления, продольное ускорение достигает 0 во время t1 и затем увеличивается снова во время t2, так что период мертвой зоны существенно сокращается. Причина этого заключается в следующем: в вышеуказанном процессе вычисления для управления демпфированием вибрации, оценивается, находится ли состояние транспортного средства в периоде мертвой зоны, и усиление k2 обратной связи, на которое угловая скорость кручения ведущего вала умножается в период мертвой зоны, задается равным значению, меньшему усиления k1 обратной связи, которое должно умножаться в области, отличной от периода мертвой зоны. Как результат, отклик движущего крутящего момента относительно значения команды управления целевым крутящим моментом в период мертвой зоны ускоряется таким образом, что период мертвой зоны существенно сокращается по сравнению с традиционной технологией.
[0111] Таким образом, устройство управления для электрического транспортного средства первого варианта осуществления представляет собой устройство управления для электрического транспортного средства для реализации устройства управления для электрического транспортного средства, которое выполнено с возможностью управения крутящим моментом мотора на основании значения Tmf* команды управления конечным крутящим моментом посредством вычисления значения Tmf* команды управления конечным крутящим моментом таким образом, что управление демпфированием вибрации для уменьшения вибрации системы трансмиссии для передачи движущей силы транспортного средства, выполняется для значения команды управления целевым крутящим моментом, заданного на основании информации о транспортном средстве, и устройство управления для электрического транспортного средства вычисляет значение Tmf* команды управления конечным крутящим моментом на основании значения Tm* команды управления целевым крутящим моментом и значения, полученного посредством умножения угловой скорости кручения ведущего вала на усиление обратной связи, и оценивает период мертвой зоны, в течение которого крутящий момент мотора, выводимый из мотора 4, не передается в крутящий момент ведущего вала транспортного средства, посредством использования модели 502 транспортного средства, которая моделирует систему трансмиссии для передачи движущей силы. Значения k1, k2 в качестве усиления обратной связи задаются отдельно для периода, в течение которого крутящий момент мотора передается в крутящий момент ведущего вала транспортного средства, и для периода мертвой зоны. Настоящим, усиления k1, k2 обратной связи могут задаваться отдельно для случая, в котором состояние транспортного средства находится в области, отличной от периода мертвой зоны, и для случая, в котором состояние транспортного средства находится в период мертвой зоны. Как результат, отклик крутящего момента ведущего вала в период мертвой зоны может регулироваться необязательно таким образом, что период мертвой зоны может сокращаться посредством ускорения отклика крутящего момента ведущего вала в период мертвой зоны по сравнению с откликом в области, отличной от периода мертвой зоны.
[0112] Кроме того, в устройстве управления для электрического транспортного средства первого варианта осуществления, угловая скорость кручения ведущего вала вычисляется из отклонения между угловой скоростью вращения ведущих колес и преобразованным значением ведущего вала угловой скорости вращения мотора. Это позволяет составлять систему управления с обратной связью угловой скорости кручения ведущего вала на основании угловой скорости вращения ведущих колес и значения определения угловой скорости вращения мотора.
[0113] Кроме того, с помощью устройства управления для электрического транспортного средства первого варианта осуществления, усиление k2 обратной связи для периода мертвой зоны задается равным значению, меньшему усиления k1 обратной связи для периода, в течение которого крутящий момент мотора передается в крутящий момент ведущего вала транспортного средства. Настоящим, отклик движущего крутящего момента относительно значения команды управления целевым крутящим моментом в период мертвой зоны ускоряется таким образом, что период мертвой зоны существенно сокращается по сравнению с традиционной технологией.
[0114] Кроме того, с помощью устройства управления для электрического транспортного средства первого варианта осуществления, задерживающий элемент системы управления добавляется в модель транспортного средства. Задерживающий элемент системы управления включает в себя по меньшей мере одно из временной задержки, вызываемой, когда состояние транспортного средства определяется, и заданный процесс выполняется, временной задержки, требуемой для вычисления до тех пор, пока значение Tmf* команды управления конечным крутящим моментом не вычисляется из значения команды управления целевым крутящим моментом, и временной задержки до тех пор, пока крутящий момент мотора фактически не формируется, относительно значения Tmf* команды управления конечным крутящим моментом. Настоящим, в процессе вычисления для управления демпфированием вибрации, влияние временных задержек вследствие времени вычислений для управления, времени обработки сигналов датчика и задержки отклика мотора может компенсироваться.
[0115] Второй вариант осуществления
Устройство управления для электрического транспортного средства второго варианта осуществления, который описан ниже, отличается от первого варианта осуществления, описанного выше, по способу обработки вычисления для управления демпфированием вибрации, выполняемого на этапе S203.
[0116] Фиг.8 является блок-схемой управления для описания процесса вычисления для управления демпфированием вибрации во втором варианте осуществления. Процесс вычисления для управления демпфированием вибрации настоящего варианта осуществления выполняется посредством использования модуля 801 F/F-компенсации, модуля 802 F/B-компенсации и сумматора 803.
[0117] Модуль 801 F/F-компенсации принимает значение Tm* команды управления целевым крутящим моментом и вычисляет значение Tm1* команды управления первым крутящим моментом и оцененное значение ω^m угловой скорости вращения мотора относительно значения Tm1* команды управления первым крутящим моментом.
[0118] Модуль 802 F/B-компенсации принимает оцененное значение ω^m угловой скорости вращения мотора относительно значения Tm1* команды управления первым крутящим моментом и значение ωm определения частоты вращения мотора и вычисляет значение Tm2* команды управления вторым крутящим моментом.
[0119] Сумматор 803 суммирует значение Tm1* команды управления первым крутящим моментом со значением Tm2* команды управления вторым крутящим моментом и выводит значение Tmf* команды управления конечным крутящим моментом.
[0120] Фиг.9 является блок-схемой управления для описания подробностей модуля 801 F/F-компенсации, проиллюстрированного на фиг.8. Модуль 801 F/F-компенсации состоит из модуля 901 F/B-вычисления угловой скорости кручения ведущего вала и модели 906 транспортного средства.
[0121] Модель 906 транспортного средства состоит из модели на основе мертвых зон, к которой уравнения (1)-(18) применяются таким образом, что параметры транспортного средства и зазор в шестернях от мотора 4 до ведущего вала 8 моделируются. Следует отметить, что в модели 906 транспортного средства, блочная конфигурация управления модуля 907 оценки периодов мертвой зоны для вычисления оцененного значения угловой скорости кручения ведущего вала и оцененного значения угла кручения ведущего вала в качестве значения определения периода мертвой зоны является идентичной блочной конфигурации управления модели 502 транспортного средства, описанной в первом варианте осуществления. Крутящий момент Td ведущего вала, полученный с учетом модели на основе мертвых зон, проиллюстрированной в качестве блока 908 определения мертвых зон, вычисляется посредством применения уравнения (27).
[0122] В настоящем варианте осуществления, когда значение Tm1* команды управления первым крутящим моментом вводится в модель 906 транспортного средства, оцененное значение ω^d угловой скорости кручения ведущего вала и оцененное значение угловой скорости вращения мотора относительно значения Tm1* команды управления первым крутящим моментом вычисляются, и кроме того, угол θd кручения ведущего вала, который является интегрированным значением оцененного значения ω^d угловой скорости кручения ведущего вала, вводится в блок 908 определения мертвых зон таким образом, что вычисляется оцененное значение θ^d угла кручения ведущего вала. Оцененное значение θ^d угла кручения ведущего вала используется в качестве значения определения периода мертвой зоны, служащего в качестве показателя для определения, на основании которого определяется, находится ли состояние транспортного средства в периоде мертвой зоны, аналогично первому варианту осуществления.
[0123] Оцененное значение угловой скорости вращения мотора относительно значения Tm1* команды управления первым крутящим моментом, выводимое из модели 906 транспортного средства, вводится в модуль 802 F/B-компенсации (см. фиг.8), и оцененное значение ω^d угловой скорости кручения ведущего вала и оцененное значение θ^d угла кручения ведущего вала вводятся в модуль 901 F/B-вычисления угловой скорости кручения ведущего вала.
[0124] Модуль 901 F/B-вычисления угловой скорости кручения ведущего вала включает в себя усиление 902 обратной связи (F/B-усиление k1), усиление 903 обратной связи (F/B-усиление k2), переключатель 904 усиления и модуль 905 вычитания. Модуль 901 F/B-вычисления угловой скорости кручения ведущего вала принимает значение команды управления целевым крутящим моментом, оцененное значение ω^d угловой скорости кручения ведущего вала и оцененное значение θ^d угла кручения ведущего вала и выводит значение команды управления первым крутящим моментом.
[0125] Усиление 902 обратной связи принимает оцененное значение ω^d угловой скорости кручения ведущего вала и выводит, в переключатель 904 усиления, значение, вычисленное посредством умножения оцененного значения ω^d угловой скорости кручения ведущего вала на F/B-усиление k1, вычисленное на основании коэффициента ζr1 затухания для отклика модели в области, отличной от периода мертвой зоны, посредством применения уравнения (26).
[0126] Усиление 903 обратной связи принимает оцененное значение ω^d угловой скорости кручения ведущего вала и выводит, в переключатель 904 усиления, значение, вычисленное посредством умножения оцененного значения ω^d угловой скорости кручения ведущего вала на F/B-усиление k2, вычисленное на основании коэффициента ζr2 затухания для отклика модели в период мертвой зоны посредством применения уравнения (26).
[0127] Оцененное значение угла кручения ведущего вала и соответствующие выводы из усилений 902 и 903 обратной связи вводятся в переключатель 904 усиления. На основании оцененного значения угла кручения ведущего вала в качестве значения определения периода мертвой зоны, любой из выводов из усилений 902 и 903 обратной связи выводится в модуль 905 вычитания.
[0128] Следует отметить, что как описано в первом варианте осуществления, когда оцененное значение угла кручения ведущего вала равно 0, определяется то, что состояние транспортного средства находится в период мертвой зоны, и когда оцененное значение угла кручения ведущего вала отличается от 0, определяется то, что состояние транспортного средства находится в области, отличной от периода мертвой зоны. Соответственно, когда оцененное значение угла кручения ведущего вала отличается от 0, переключатель 904 усиления выводит результат вычисления усиления 902 обратной связи в модуль 905 вычитания, и когда оцененное значение угла кручения ведущего вала равно 0, переключатель 904 усиления выводит результат вычисления усиления 903 обратной связи в модуль 905 вычитания.
[0129] Модуль 905 вычитания вычитает выходное значение переключателя 904 усиления из значения команды управления целевым крутящим моментом таким образом, чтобы вычислять значение команды управления первым крутящим моментом. Значение команды управления первым крутящим моментом выводится в сумматор 803, проиллюстрированный на фиг.8.
[0130] Фиг.10 является блок-схемы управления, иллюстрирующей подробности модуля 802 F/B-компенсации, проиллюстрированного на фиг.8. Модуль 802 F/B-компенсации состоит из усиления 1001 (усиления K), фильтра 1002 и фильтра 1003.
[0131] Усиление K налагается таким образом, чтобы регулировать допустимый запас стабильности (допустимый запас по усилению, допустимый запас по фазе) системы управления с обратной связью, и задается равным значению 1 или меньше.
[0132] Фильтр 1002 представляет собой фильтр, имеющий передаточную характеристику GP(s), которая моделирует передаточную характеристику от крутящего момента Tm мотора до частоты ωm вращения мотора. Уравнение (8) применяется к передаточной характеристике GP(s).
[0133] Фильтр 1003 представляет собой фильтр H(s)/Gp(s), состоящий из обратной системы из передаточной характеристики GP(s) и полосового фильтра H(s). Полосовой фильтр H(s) задается таким образом, что свойство демпфирования на стороне нижних частот, в общем, является идентичным свойству демпфирования на стороне верхних частот, и резонансная частота fp крутильных колебаний приводной системы находится ближе к центральной части полосы пропускания на логарифмической оси (логарифмической шкале).
[0134] Например, в случае если полосовой фильтр H(s) состоит из первичного фильтра верхних частот и первичного фильтра нижних частот, полосовой фильтр H(s) состоит, как выражается посредством уравнения (28), из следующего.
[0135] Математическая формула 28

[0136] Следует отметить, что τL=1/(2πfHC), fHC=k*fp, τH=1/(2πfLC), fLC=fp/k удовлетворяются. Кроме того, частота fp указывает резонансную частоту крутильных колебаний приводной системы, и k указывает данное значение, составляющее полосовую фильтрацию.
[0137] Настоящим, модуль 802 F/B-компенсации сначала вычисляет оцененное значение конечной угловой скорости вращения мотора таким образом, что оцененное значение угловой скорости вращения мотора относительно значения команды управления первым крутящим моментом, вычисленного посредством модели 906 транспортного средства модуля 801 F/F-компенсации, суммируется с оцененным значением угловой скорости вращения мотора относительно значения команды управления вторым крутящим моментом, вычисленным посредством ввода значения команды управления вторым крутящим моментом до умножения на усиление K в передаточную характеристику GP(s). Затем, отклонение между оцененным значением конечной угловой скорости вращения мотора и значением определения угловой скорости вращения мотора, определенным посредством датчика 6 вращения, вычисляется, и фильтр H(s)/Gp(s) применяется к вычисленному значению таким образом, что вычисляется значение команды управления вторым крутящим моментом до умножения на усиление K. После этого, значение команды управления вторым крутящим моментом до умножения на усиление K умножается на усиление K таким образом, что вычисляется значение команды управления вторым крутящим моментом.
[0138] Как проиллюстрировано на фиг.8, значение команды управления первым крутящим моментом, выводимое из модуля 801 F/F-компенсации, и значение команды управления вторым крутящим моментом, выводимое из модуля 802 F/B-компенсации, суммируются в сумматоре 803 таким образом, что вычисляется значение Tmf* команды управления конечным крутящим моментом.
[0139] Даже при значении Tmf* команды управления конечным крутящим моментом, вычисленном таким способом, как показано посредством результата управления на фиг.12 (см. второй вариант осуществления на чертеже), отклик крутящего момента ведущего вала относительно значения команды управления целевым крутящим моментом в области мертвой зоны может ускоряться таким образом, что период мертвой зоны может существенно сокращаться по сравнению с традиционной технологией, аналогично результату управления посредством устройства управления для электрического транспортного средства первого варианта осуществления.
[0140] Таким образом, устройство управления для электрического транспортного средства второго варианта осуществления имеет такую конфигурацию, в которой: угловая скорость кручения ведущего вала представляет собой оцененное значение угловой скорости кручения ведущего вала, которое оценивается посредством использования модели 906 транспортного средства из значения команды управления целевым крутящим моментом; оцененное значение угла кручения ведущего вала вычисляется из значения команды управления целевым крутящим моментом посредством использования модели 906 транспортного средства; и значение Tmf* команды управления конечным крутящим моментом задается на основании значения команды управления целевым крутящим моментом, оцененного значения угла кручения ведущего вала и значения, полученного посредством умножения оцененного значения угловой скорости кручения ведущего вала на усиление обратной связи. Настоящим, значение команды управления первым крутящим моментом (значение компенсации с прямой связью) вычисляется из оцененного значения угла кручения ведущего вала и оцененного значения угловой скорости кручения ведущего вала, вычисленного посредством модели 906 транспортного средства, включенной в модуль 801 компенсации с прямой связью, в силу этого позволяя ускорять скорость отклика крутящего момента ведущего вала без потери стабильности системы управления с обратной связью.
[0141] Кроме того, с помощью устройства управления для электрического транспортного средства второго варианта осуществления, период мертвой зоны оценивается посредством использования модуля 907 оценки периодов мертвой зоны, включенного в модель 906 транспортного средства, и оцененное значение ω^d угловой скорости кручения ведущего вала оценивается посредством использования модуля 907 оценки периодов мертвой зоны, включенного в модель 906 транспортного средства. Настоящим, во время уменьшения крутильных вибраций посредством использования оцененного значения ω^d угловой скорости кручения ведущего вала, оценка периода мертвой зоны и оценка угловой скорости кручения ведущего вала могут вычисляться посредством использования общей части модели (502, 906) транспортного средства, которая моделирует систему трансмиссии для передачи движущей силы транспортного средства, и в силу этого, по сравнению со случаем вычисления угловой скорости кручения ведущего вала на основании модели другого транспортного средства или на основании значения определения, вычислительная нагрузка может уменьшаться.
[0142] Третий вариант осуществления
Устройство управления для электрического транспортного средства третьего варианта осуществления, который описан ниже, отличается от второго варианта осуществления, описанного выше, по конфигурации модуля 801 F/F-компенсации, используемого для процесса вычисления для управления демпфированием вибрации, выполняемого на этапе S203. Более конкретно, модуль 801 F/F-компенсации настоящего варианта осуществления дополнительно включает в себя модуль 1109 регулирования времени задержки системы управления, и это представляет собой отличие от второго варианта осуществления. В третьем варианте осуществления, поскольку предусмотрен модуль 1109 регулирования времени задержки системы управления, временная задержка на управление, вызываемая вследствие элемента задержки системы управления, может учитываться относительно оцененного значения частоты вращения мотора относительно значения команды управления первым крутящим моментом, выводимого из модели 1106 транспортного средства.
[0143] Фиг.11 является блок-схемой, иллюстрирующей подробности модуля 801 F/F-компенсации третьего варианта осуществления. Модуль 801 F/F-компенсации настоящего варианта осуществления состоит из модуля 1101 F/B-вычисления угловой скорости кручения ведущего вала, модели 1106 транспортного средства и модуля 1109 регулирования времени задержки системы управления.
[0144] Аналогично модели 906 транспортного средства, описанной во втором варианте осуществления, модель 1106 транспортного средства состоит из модели на основе мертвых зон, к которой уравнения (1)-(18) применяются таким образом, что моделируются параметры транспортного средства и зазор в шестернях. Кроме того, модель 1106 транспортного средства также включает в себя модуль 1107 оценки периодов мертвой зоны, соответствующий модулю 907 оценки периодов мертвой зоны второго варианта осуществления. Крутящий момент Td ведущего вала, полученный с учетом модели на основе мертвых зон, проиллюстрированной в качестве блока 1108 определения мертвых зон, вычисляется посредством применения уравнения (27).
[0145] Модуль 1109 регулирования времени задержки системы управления включает в себя время e-L1s определения датчика вычислений для управления, в качестве элемента временной задержки вычислений для управления и элемента временной задержки определения датчика и задержки Ga(s) отклика мотора, и модуль 1109 регулирования времени задержки системы управления задерживает оцененное значение угловой скорости вращения мотора относительно значения команды управления первым крутящим моментом, выводимое из модели 1106 транспортного средства, только на заданное время и выводит его в модуль 802 F/B-компенсации. Задержка Ga(s) отклика мотора может выражаться посредством уравнения (29) следующим образом.
[0146] Математическая формула 29

[0147] Здесь, τa указывает постоянную времени отклика мотора.
[0148] Следует отметить, что модуль 1109 регулирования времени задержки системы управления может быть выполнен с возможностью включать в себя по меньшей мере одну временную задержку из временной задержки определения датчика, вызываемой, когда состояние транспортного средства определяется, и заданный процесс выполняется, временной задержки вычислений для управления, требуемой для вычисления до тех пор, пока значение Tmf* команды управления конечным крутящим моментом не вычисляется из значения команды управления целевым крутящим моментом, и задержки отклика мотора до тех пор, пока крутящий момент мотора фактически не формируется, относительно значения Tmf* команды управления конечным крутящим моментом.
[0149] Модуль 1101 F/B-вычисления угловой скорости кручения ведущего вала сконфигурирован аналогично модулю 901 F/B-вычисления угловой скорости кручения ведущего вала второго варианта осуществления и включает в себя усиление 1102 обратной связи (F/B-усиление k1), усиление 1103 обратной связи (F/B-усиление k2), переключатель 1104 усиления и модуль 1105 вычитания. Модуль 901 F/B-вычисления угловой скорости кручения ведущего вала принимает значение команды управления целевым крутящим моментом, оцененное значение ω^d угловой скорости кручения ведущего вала и оцененное значение θ^d угла кручения ведущего вала и выводит значение команды управления первым крутящим моментом.
[0150] Как описано во втором варианте осуществления, когда оцененное значение угла кручения ведущего вала отличается от 0, определяется то, что состояние транспортного средства находится в области, отличной от периода мертвой зоны, и результат вычисления усиления 1102 обратной связи выводится в модуль 1105 вычитания. Когда оцененное значение угла кручения ведущего вала равно 0, определяется то, что состояние транспортного средства находится в период мертвой зоны, и результат вычисления усиления 1103 обратной связи выводится в модуль 905 вычитания. Модуль 905 вычитания вычитает выходное значение переключателя 1104 усиления из значения команды управления целевым крутящим моментом таким образом, чтобы вычислять значение команды управления первым крутящим моментом.
[0151] Означенное представляет собой конфигурацию модуля 801 F/F-компенсации согласно третьему варианту осуществления. Аналогично второму варианту осуществления, значение команды управления первым крутящим моментом в качестве вывода модуля 801 F/F-компенсации суммируется со значением второго целевого крутящего момента, выводимым из модуля 802 F/B-компенсации в сумматоре 803 таким образом, что вычисляется значение Tmf* команды управления конечным крутящим моментом. Даже при значении Tmf* команды управления конечным крутящим моментом, вычисленном таким способом, как показано посредством результата управления на фиг.12 (см. третий вариант осуществления на чертеже), отклик крутящего момента ведущего вала относительно значения команды управления целевым крутящим моментом в области мертвой зоны может ускоряться таким образом, что период мертвой зоны может существенно сокращаться по сравнению с традиционной технологией, аналогично результатам управления посредством устройства управления для электрического транспортного средства первого и второго вариантов осуществления.
[0152] С помощью устройства управления для электрического транспортного средства третьего варианта осуществления, задерживающий элемент, включенный в систему управления, добавляется в модель транспортного средства. Задерживающий элемент системы управления включает в себя по меньшей мере одну временную задержку из временной задержки, вызываемой, когда состояние транспортного средства определяется, и заданный процесс выполняется, временной задержки, требуемой для вычисления до тех пор, пока значение Tmf* команды управления конечным крутящим моментом не вычисляется из значения команды управления целевым крутящим моментом, и временной задержки до тех пор, пока крутящий момент мотора фактически не формируется, относительно значения Tmf* команды управления конечным крутящим моментом. Настоящим, в процессе вычисления для управления демпфированием вибрации, влияние временных задержек вследствие времени вычислений для управления, времени обработки сигналов датчика и задержки отклика мотора может компенсироваться.
[0153] Четвертый вариант осуществления
Устройство управления для электрического транспортного средства четвертого варианта осуществления, который описан ниже, отличается от первого-третьего вариантов осуществления тем, что оценивается возмущающий крутящий момент, прикладываемый к мотору 4 в общем в качестве сопротивления вследствие градиента, крутящий момент мотора принудительно сходится к оцененному значению возмущающего крутящего момента наряду с уменьшением частоты вращения мотора, и управление (далее называемое «процессом управления остановкой») для вызова схождения частоты вращения мотора с 0, выполняется в то время, когда транспортное средство находится в состоянии непосредственно перед остановкой транспортного средства. Далее главным образом обсуждаются отличия от первого-третьего вариантов осуществления с точки зрения устройства управления для электрического транспортного средства четвертого варианта осуществления.
[0154] Фиг.13 является блок-схемой, иллюстрирующей процедуру процесса, программируемого с возможностью выполнения посредством контроллера 2 мотора четвертого варианта осуществления. Процессы этапов S1301-S1306 регулярно выполняются с регулярными интервалами в то время, когда система транспортного средства активируется.
[0155] Аналогично этапу S201, описанному в первом варианте осуществления, сигналы, указывающие состояния транспортного средства, вводятся в контроллер 2 мотора на этапе S1301.
[0156] На этапе S1302, контроллер 2 мотора вычисляет значение Tm1* первого целевого крутящего момента в качестве базового целевого крутящего момента. Более конкретно, контроллер 2 мотора задает значение Tm1* первого целевого крутящего момента посредством обращения к таблице «положение акселератора - крутящий момент», проиллюстрированной на фиг.14, на основании положения акселератора и скорости V транспортного средства, вводимых на этапе S1301. Следует отметить, что таблица «положение акселератора - крутящий момент» представляет собой один пример и не ограничена таблицей, проиллюстрированной на фиг.14.
[0157] На этапе S1303, контроллер 2 мотора выполняет процесс управления остановкой. Более конкретно, определяется, находится ли электрическое транспортное средство в состоянии непосредственно перед остановкой транспортного средства, и до того, как электрическое транспортное средство находится в состоянии непосредственно перед остановкой транспортного средства, значение Tm1* первого целевого крутящего момента, вычисленное на этапе S1302, задается в качестве значения Tm3* третьего целевого крутящего момента. После того, как электрическое транспортное средство находится в состоянии непосредственно перед остановкой транспортного средства, значение Tm2* второго целевого крутящего момента, которое сходится к оцененному значению Td возмущающего крутящего момента наряду с уменьшением параметра частоты вращения, пропорциональным скорости движения транспортного средства, задается в качестве значения Tm3* третьего целевого крутящего момента, и флаг FLG определения управления остановкой задается равным 1. Значение Tm2* второго целевого крутящего момента представляет собой положительный крутящий момент на дороге, идущей в подъем, отрицательный крутящий момент на дороге, идущей под спуск, и почти нуль на ровной дороге. Таким образом, состояние остановки транспортного средства может поддерживаться независимо от градиента поверхности дороги, как описано ниже. Ниже описаны подробности процесса управления остановкой. Следует отметить, что в настоящем варианте осуществления, частота ωm вращения мотора определяется в качестве параметра частоты вращения.
[0158] На этапе S1304, контроллер 2 мотора выполняет процесс управления демпфированием вибрации. Более конкретно, на основании значения Tm3* третьего целевого крутящего момента, вычисленного на этапе S1303, и частоты ωm вращения мотора, любой из процессов управления демпфированием вибрации (блоков управления, проиллюстрированных на фиг.5, 9 и 11), описанных в первом-третьем вариантах осуществления, выполняется таким образом, что вычисляется значение Tmf* команды управления конечным крутящим моментом.
[0159] Следует отметить, что в настоящем варианте осуществления, когда флаг FLG определения управления остановкой, заданный на этапе S1303, равен 1, усиление обратной связи для периода мертвой зоны в процессе управления демпфированием вибрации задается равным F/B-усилению k1, вычисленному из коэффициента ζr1 затухания для области, отличной от периода мертвой зоны. Таким образом, в настоящем варианте осуществления, даже когда состояние транспортного средства находится в период мертвой зоны, и оцененное значение угла кручения ведущего вала равно 0, значение, идентичное значению F/B-усиления для области, отличной от периода мертвой зоны, задается равным F/B-усилению для периода мертвой зоны в ходе процесса управления остановкой. Значение Tmf* команды управления конечным крутящим моментом вычисляется на основании значения, полученного посредством умножения угловой скорости кручения ведущего вала на F/B-усиление k1.
[0160] Процесс вычисления значений команд управления током, выполняемый на этапе S1305, и процесс вычисления для управления по току, выполняемый на этапе S1306, являются идентичными процессу вычисления значений команд управления током на этапе S204 и процессу вычисления для управления по току на этапе S205, как описано выше, так что их описания опускаются в настоящем варианте осуществления.
[0161] Здесь, перед описанием процесса управления остановкой, выполняемого на этапе S1303, будет описана передаточная характеристика GP(s) от крутящего момента Tm мотора до частоты ωm вращения мотора в настоящем варианте осуществления.
[0162] Когда полюса и нулевые точки передаточной функции, показанной в уравнении (8), анализируются, они могут аппроксимироваться в передаточную функцию, выражаемую посредством уравнения (30), следующим образом, и один полюс и одна нулевая точка указывают значения, чрезвычайно близкие друг к другу. Это является эквивалентным тому, что и в уравнении (30) указывают значения, чрезвычайно близкие друг к другу.
[0163] Математическая формула 30

[0164] Соответственно, посредством выполнения отмены нулей и полюсов (аппроксимации для α=β) в уравнении (8), Gp(s) составляет передаточную характеристику (второй порядок)/(третий порядок), как выражается в уравнении (31) следующим образом.
[0165] Математическая формула 31

[0166] Из передаточной характеристики GP(s) и алгоритма управления демпфированием вибрации, передаточная характеристика GP(s), выражаемая посредством уравнения (31), может рассматриваться как Gr(s), выражаемая посредством уравнения (32) следующим образом.
[0167] Математическая формула 32

[0168] Процесс управления остановкой
Ниже описаны подробности процесса управления остановкой со ссылкой на фиг.15. Фиг.15 является блок-схемой управления для реализации процесса управления остановкой. Процесс управления остановкой выполняется посредством использования модуля 1501 задания крутящего F/B-момента по частоте вращения мотора, модуля 1502 оценки возмущающего крутящего момента, сумматора 1503 и модуля 1504 сравнения крутящих моментов. Далее подробно описаны их конфигурации.
[0169] Модуль 1501 задания крутящих F/B-моментов по частоте вращения мотора вычисляет крутящий момент Tобратной связи по частоте вращения мотора (далее в этом документе называемый «крутящим F/B-моментом по частоте вращения мотора») на основании определенной частоты ωm вращения мотора. Ниже описаны подробности вышеупомянутого со ссылкой на фиг.16.
[0170] Фиг.16 является видом для описания способа вычисления крутящего F/B-момента Tпо частоте вращения мотора на основании частоты ωm вращения мотора. Модуль 1501 задания крутящих F/B-моментов по частоте вращения мотора включает в себя умножитель 1601 и вычисляет крутящий F/B-момент Tпо частоте вращения мотора посредством умножения частоты ωm вращения мотора на усиление Kvref. Следует отметить, что Kvref является отрицательным значением (со знаком «минус»), необходимым для ограничения тормозного расстояния и плавного замедления электрического транспортного средства, и устанавливается, например, надлежащим образом из экспериментальных данных и т.п.Крутящий F/B-момент Tпо частоте вращения мотора задается в качестве крутящего момента, который позволяет получать большую тормозную силу по мере того, как частота ωm вращения мотора больше.
[0171] Следует отметить, что в вышеприведенном описании, модуль 1501 задания крутящего F/B-момента по частоте вращения мотора вычисляет крутящий F/B-момент Tпо частоте вращения мотора посредством умножения частоты ωm вращения мотора на усиление Kvref, но может вычислять крутящий F/B-момент Tпо частоте вращения мотора посредством использования таблицы рекуперативных крутящих моментов, которая задает рекуперативный крутящий момент как частоту ωm вращения мотора, таблицу коэффициентов демпфирования, в которой коэффициент демпфирования частоты ωm вращения мотора сохраняется заранее, и т.п.
[0172] Теперь ссылаясь на фиг.15, далее продолжается описание. Модуль 1502 оценки возмущающего крутящего момента вычисляет оцененное значение Td возмущающего крутящего момента на основании определенной частоты ωm вращения мотора и значения Tm* команды управления крутящим моментом мотора. Ниже описаны подробности модуля 1502 оценки возмущающего крутящего момента со ссылкой на фиг.17.
[0173] Фиг.17 является блок-схемой для описания способа вычисления оцененного значения Td возмущающего крутящего момента на основании значения Tm3* третьего целевого крутящего момента и частоты ωm вращения мотора в качестве параметра частоты вращения, пропорционального скорости V транспортного средства. Модуль 1502 оценки возмущающего крутящего момента включает в себя блок 1701 управления, блок 1702 управления и модуль 1703 суммирования и вычитания.
[0174] Блок 1701 управления функционирует в качестве фильтра, имеющего передаточную характеристику H1(s)/Gr(s), и принимает частоту ωm вращения мотора и выполняет фильтрацию, с тем чтобы вычислять оцененное значение первого крутящего момента мотора. Gr(s) представляет собой модель для передаточной характеристики от крутящего момента, вводимого в транспортное средство, до частоты вращения мотора и выражается посредством уравнения (32). H1(s) представляет собой фильтр нижних частот, имеющий такую передаточную характеристику, что разность между его степенью знаменателя и степенью числителя не равна или больше разности между степенью знаменателя и степенью числителя модели Gr(s).
[0175] Блок 1702 управления функционирует в качестве фильтра нижних частот, имеющего передаточную характеристику H1(s), и вычисляет оцененное значение второго крутящего момента мотора таким образом, что блок 1702 управления принимает значение Tm* команды управления крутящим моментом мотора и выполняет фильтрацию для него. [0176] После этого, модуль 1703 суммирования и вычитания вычитает оцененное значение первого крутящего момента мотора из оцененного значения второго крутящего момента мотора таким образом, что вычисляется оцененное значение возмущающего крутящего момента.
[0177] Следует отметить, что в настоящем варианте осуществления, возмущающий крутящий момент оценивается посредством использования модуля наблюдения возмущений, проиллюстрированного на фиг.17, но может оцениваться посредством использования измерительного прибора, такого как G-датчики на передней и задней сторонах транспортного средства.
[0178] Здесь, сопротивление воздуха, погрешность моделирования, вызываемая посредством варьирования веса транспортного средства вследствие числа пассажиров или допустимой нагрузки, сопротивление крену шин, сопротивление вследствие градиента поверхности дороги и т.п.считаются возмущениями, фактор возмущений, доминирующий непосредственно перед остановкой транспортного средства, представляет собой сопротивление вследствие градиента. Факторы возмущений отличаются в зависимости от условий вождения, но модуль 1502 оценки возмущающего крутящего момента вычисляет оцененное значение Td возмущающего крутящего момента на основании значения Tm3* третьего целевого крутящего момента, частоты ωm вращения мотора, алгоритма управления демпфированием вибрации и передаточной характеристики Gr(s), извлекаемой из модели Gp(s) транспортного средства, в силу этого позволяя совместно оценивать факторы возмущений. Это позволяет стабильно добиваться плавной остановки транспортного средства из замедления при любом состоянии движения.
[0179] Теперь ссылаясь на фиг.15, далее продолжается описание. Сумматор 1503 вычисляет значение Tm2* второго целевого крутящего момента посредством суммирования крутящего F/B-момента Tпо частоте вращения мотора, вычисленного посредством модуля 1501 задания крутящих F/B-моментов по частоте вращения мотора, с оцененным значением Td возмущающего крутящего момента, вычисленным посредством модуля 1502 оценки возмущающих крутящих моментов.
[0180] Модуль 1504 сравнения крутящих моментов сравнивает абсолютную величину значения Tm1* первого целевого крутящего момента с абсолютной величиной значения Tm2* второго целевого крутящего момента и задает большее из значений целевого крутящего момента в качестве значения Tm3* третьего целевого крутящего момента. Значение Tm2* второго целевого крутящего момента меньше значения Tm1* первого целевого крутящего момента во время движения транспортного средства, и когда транспортное средство замедляется и доходит до момента времени непосредственно перед остановкой транспортного средства (параметр частоты вращения, пропорциональный скорости транспортного средства, равен или меньше заданного значения), значение Tm2* второго целевого крутящего момента становится больше значения Tm1* первого целевого крутящего момента. Таким образом, когда значение Tm1* первого целевого крутящего момента превышает значение Tm2* второго целевого крутящего момента, модуль 1004 сравнения крутящих моментов определяет то, что транспортное средство находится в состоянии непосредственно перед остановкой транспортного средства, и задает значение Tm3* третьего целевого крутящего момента равным значению Tm1* первого целевого крутящего момента. Кроме того, когда значение Tm2* второго целевого крутящего момента становится больше значения Tm1* первого целевого крутящего момента, модуль 1004 сравнения крутящих моментов определяет то, что транспортное средство находится в состоянии непосредственно перед остановкой транспортного средства, и выполняет процесс управления остановкой посредством переключения значения Tm3* третьего целевого крутящего момента со значения Tm1* первого целевого крутящего момента на значение Tm2* второго целевого крутящего момента. Следует отметить, что для поддержания состояния остановки транспортного средства значение Tm2* второго целевого крутящего момента представляет собой положительный крутящий момент на дороге, идущей в подъем, отрицательный крутящий момент на дороге, идущей под спуск, и сходится почти к нулю на ровной дороге.
[0181] Ниже описано задание флага FLG определения управления остановкой со ссылкой на фиг.18. Фиг.18 является блок-схемой, иллюстрирующей процедуру процесса (процесса определения управления остановкой) для задания флага FLG определения управления остановкой. Процесс определения управления остановкой регулярно выполняется с регулярными интервалами посредством контроллера 2 мотора в то время, когда система транспортного средства активируется.
[0182] На этапе S1801, контроллер 2 мотора сравнивает значение Tm1* первого целевого крутящего момента со значением Tm2* второго целевого крутящего момента, с тем чтобы определять, находится ли транспортное средство под управлением остановкой. Когда значение Tm2* второго целевого крутящего момента составляет значение Tm1* первого целевого крутящего момента или меньше, определяется то, что транспортное средство не находится под управлением остановкой, и процесс этапа S1802 после него выполняется. Когда значение Tm2* второго целевого крутящего момента превышает значение Tm1* первого целевого крутящего момента, определяется, что транспортное средство находится под управлением остановкой, и выполняется процесс этапа S1804 для задания флага FLG определения управления остановкой равным 1.
[0183] На этапе S1802, контроллер 2 мотора определяет, превышает ли абсолютное значение частоты ωm вращения мотора указанную частоту ω1 вращения мотора. Частота ω1 вращения мотора составляет значение, указываемое заранее, и составляет значение, которое достигает низкой частоты вращения, на основании которой можно определять то, что транспортное средство находится в состоянии непосредственно перед остановкой транспортного средства. Когда абсолютное значение частоты ωm вращения мотора превышает частоту ω1 вращения мотора, определяется то, что транспортное средство не находится под управлением остановкой, и процесс этапа S1803 для задания флага FLG определения управления остановкой равным 0 выполняется. Когда частота ωm вращения мотора составляет частоту ω1 вращения мотора или меньше, определяется то, что транспортное средство находится под управлением остановкой, и процесс этапа S1804 выполняется.
[0184] На этапе S1803, контроллер 2 мотора задает флаг FLG определения управления остановкой равным 0 в ответ на определение того, что транспортное средство не находится под управлением остановкой, и завершает процесс определения управления остановкой.
[0185] На этапе S1804, контроллер 2 мотора задает флаг FLG определения управления остановкой равным 1 в ответ на определение того, что транспортное средство находится под управлением остановкой, и завершает процесс определения управления остановкой.
[0186] Когда флаг FLG определения управления остановкой равен 1, F/B-усиление k2 для периода мертвой зоны и F/B-усиление k1 для области, отличной от периода мертвой зоны, в процессе управления демпфированием вибрации этапа S1304, описанного со ссылкой на фиг.13, задаются равными идентичному значению.
[0187] Настоящим, в то время как вибрация транспортного средства или нестабильное управление для транспортного средства вследствие управления с обратной связью, выполняемого в области мертвой зоны в ходе управления остановкой, ограничивается, транспортное средство может плавно останавливаться только посредством крутящего момента мотора, и состояние остановки транспортного средства может поддерживаться.
[0188] Следует отметить, что задание флага FLG определения управления остановкой равным 1 не обязательно требует обоих из определений на этапе S1801 и этапе S1802, и флаг FLG определения управления остановкой может задаваться равным 1 только на основании определения «Нет» на этапе S1802. Таким образом, когда абсолютное значение частоты вращения мотора меньше указанной частоты ω1 вращения мотора, может определяться то, что транспортное средство находится под управлением остановкой. Хотя не показано в данном документе, крутящий момент мотора может регулироваться наряду с уменьшением частоты вращения мотора, и может определяться, выполняется ли управление для вызова схождения крутящего момента мотора с оцененным значением возмущающего крутящего момента. Когда управление выполняется, может быть определено, что транспортное средство находится под управлением остановкой.
[0189] В нижеприведенном описании, поясняется преимущество, полученное, когда устройство управления для электрического транспортного средства четвертого варианта осуществления применяется к электрическому транспортному средству, со ссылкой на фиг.19.
[0190] Фиг.19 является видом для сравнения одного примера результата управления посредством устройства управления для электрического транспортного средства настоящего варианта осуществления с результатом управления посредством традиционного управления. Фиг.19 иллюстрирует временную диаграмму в случае, если процесс управления остановкой выполняется на ровной дороге. Значение команды управления целевым крутящим моментом, частота вращения мотора и продольное ускорение транспортного средства показаны в этом порядке сверху, и непрерывная линия указывает результат управления посредством настоящего варианта осуществления, и пунктирная линия указывает результат управления посредством традиционного управления.
[0191] Во время t1, процесс управления остановкой начинается, и флаг FLG определения управления остановкой задается равным 1 на этапе S1804 на фиг.18.
[0192] Когда процесс управления остановкой выполняется от времени t1 до t2, частота вращения мотора сходится к 0 асимптотически. Затем, после времени t2, частота вращения мотора проходит через 0 таким образом, что формируется период мертвой зоны.
[0193] В это время, при традиционном управлении, F/B-усиление для периода мертвой зоны задается равным значению, меньшему F/B-усиления для области, отличной от периода мертвой зоны, в процессе управления демпфированием вибрации таким образом, что значение команды управления конечным крутящим моментом демонстрирует быстрый отклик относительно значения команды управления целевым крутящим моментом. Соответственно, даже в области, проходящей через период мертвой зоны, управление с обратной связью с быстрым откликом выполняется таким образом, что длительные вибрации формируются в значении команды управления целевым крутящим моментом. Как результат, частота вращения мотора вибрирует согласно значению команды управления целевым крутящим моментом таким образом, что вибрации, которые ощущает водитель, формируются в кузове транспортного средства.
[0194] С другой стороны, в устройстве управления для электрического транспортного средства настоящего варианта осуществления, даже если период мертвой зоны формируется после времени t2, идентичное значение задается для F/B-усилений для периода мертвой зоны и для области, отличной от периода мертвой зоны, таким образом, что значение команды управления конечным крутящим моментом не демонстрирует быстрый отклик относительно значения команды управления целевым крутящим моментом. Как результат, как проиллюстрировано в данном документе, длительные вибрации, сформированные, когда транспортное средство находится в состоянии непосредственно перед остановкой транспортного средства на ровной дороге, уменьшаются таким образом, что вибрации значения команды управления целевым крутящим моментом и частоты вращения мотора уменьшаются, в силу этого позволяя ограничивать формирование вибраций, в кузове транспортного средства, которые ощущает водитель.
[0195] Таким образом, с помощью устройства управления для электрического транспортного средства четвертого варианта осуществления, определяется, находится ли транспортное средство в состоянии непосредственно перед остановкой транспортного средства, и когда транспортное средство находится непосредственно перед остановкой транспортного средства, усиления k1, k2 обратной связи для периода, в течение которого крутящий момент мотора передается в крутящий момент ведущего вала транспортного средства, и для периода мертвой зоны задаются равными идентичному значению. Настоящим, можно уменьшать вибрации, которые могут формироваться в кузове транспортного средства, когда отклик крутящего момента мотора относительно значения команды управления крутящим моментом мотора становится высоким после того, как транспортное средство находится в состоянии непосредственно перед остановкой транспортного средства.
[0196] Кроме того, устройство управления для электрического транспортного средства четвертого варианта осуществления имеет такую конфигурацию, в которой: значение Tm1* первого целевого крутящего момента в качестве значения команды управления целевым крутящим моментом вычисляется; значение второго целевого крутящего момента, которое сходится к оцененному значению возмущающего крутящего момента наряду с уменьшением частоты вращения мотора, вычисляется; абсолютная величина значения первого целевого крутящего момента сравнивается с абсолютной величиной значения второго целевого крутящего момента; и когда значение второго целевого крутящего момента превышает значение первого целевого крутящего момента, значение, полученное посредством выполнения процесса управления демпфированием вибрации для значения второго целевого крутящего момента, задается в качестве значения Tmf* команды управления конечным крутящим моментом, и определяется то, что транспортное средство находится в состоянии непосредственно перед остановкой транспортного средства. Настоящим, значение усиления обратной связи может задаваться на основании времени для переключения на процесс управления остановкой. Соответственно, только в ходе управления для вызова схождения крутящего момента мотора с оцененным значением возмущающего крутящего момента усиление k1 обратной связи для области, отличной от периода мертвой зоны, может задаваться с возможностью иметь значение, идентичное значению усиления k2 обратной связи для периода мертвой зоны.
[0197] Кроме того, устройство управления для электрического транспортного средства четвертого варианта осуществления может иметь такую конфигурацию, в которой: возмущающий крутящий момент, прикладываемый к мотору, оценивается; параметр частоты вращения (частота вращения мотора в настоящем варианте осуществления), пропорциональный скорости движения электрического транспортного средства, определяется; и когда крутящий момент мотора сходится к возмущающему крутящему моменту наряду с уменьшением параметра частоты вращения, определяется то, что транспортное средство находится в состоянии непосредственно перед остановкой транспортного средства. Таким образом, может быть определено, что выполняется управление с обратной связью для вызова схождения значения команды управления крутящим моментом мотора с оцененным значением возмущающего крутящего момента, и управление остановкой выполняется в период мертвой зоны, проходящий через зазор. Соответственно, можно предотвратить вибрацию транспортного средства в ходе управления остановкой и нестабильность управления с обратной связью в ходе управления остановкой.
[0198] Кроме того, устройство управления для электрического транспортного средства четвертого варианта осуществления может иметь такую конфигурацию, в которой: параметр частоты вращения, пропорциональный скорости движения электрического транспортного средства, определяется; и когда абсолютное значение параметра частоты вращения составляет заданное значение или меньше, определяется то, что транспортное средство находится в состоянии непосредственно перед остановкой транспортного средства. Настоящим, объем вычисления, связанного с определением относительно того, выполняется ли процесс управления остановкой, может уменьшаться, в силу этого позволяя уменьшать вычислительную нагрузку программного обеспечения.
[0199] Вариант осуществления настоящего изобретения описан выше, но вариант осуществления примерно иллюстрирует часть примера варианта применения настоящего изобретения и не имеет намерение ограничивать объем настоящего изобретения конкретной конфигурацией варианта осуществления.
[0200] Например, в первом-третьем вариантах осуществления, оцененное значение угла кручения ведущего вала в качестве выходного значения модели на основе мертвых зон (блоков 503, 908, 1108 определения мертвых зон) вычисляется как значение определения периода мертвой зоны, которое представляет собой критерий определения относительно того, находится ли система трансмиссии для передачи движущей силы транспортного средства в периоде мертвой зоны. Когда оцененное значение угла кручения ведущего вала равно 0, определяется то, что состояние транспортного средства находится в период мертвой зоны. Тем не менее, оцененное значение угла кручения ведущего вала не обязательно используется в качестве значения определения периода мертвой зоны, и θd (угол кручения ведущего вала), который представляет собой входное значение модели на основе мертвых зон, может использоваться в качестве значения определения периода мертвой зоны. В этом случае, можно определять, находится ли система трансмиссии для передачи движущей силы транспортного средства в периоде мертвой зоны, на основании того, находится ли угол θd кручения ведущего вала в пределах заданного диапазона пороговых значений. Пороговое значение, например, может составлять -θdead/2<θd<θdead/2, со ссылкой на уравнение (27).
[0201] Кроме того, в модуле F/B-вычисления угловой скорости кручения ведущего вала, описанном со ссылкой на фиг.5, 7, 9, 11, положение, в котором усиления k1, k2 обратной связи применяются к оцененному значению угловой скорости кручения ведущего вала, может заменяться положением, в котором оцененное значение угловой скорости кручения ведущего вала, к которому применяются усиления, вводится в переключатель усиления. В этом случае, оцененное значение угловой скорости кручения ведущего вала сначала вводится в переключатель усиления. Когда значение определения периода мертвой зоны отличается от 0, переключатель усиления выводит оцененное значение угловой скорости кручения ведущего вала в усиление k1 обратной связи, и когда значение определения периода мертвой зоны равно 0, переключатель усиления выводит оцененное значение угловой скорости кручения ведущего вала в усиление k2 обратной связи. Следует отметить, что соответствующие выводы из усилений k1, k2 обратной связи выводятся в модуль вычитания и вычитаются из значения команды управления целевым крутящим моментом. Когда модуль F/B-вычисления угловой скорости кручения ведущего вала сконфигурирован таким способом, можно уменьшать вычислительную нагрузку в контроллере 2 мотора.
[0202] Кроме того, в четвертом варианте осуществления, описанном выше, частота вращения мотора сходится к 0 в ходе управления остановкой, но значение, к которому сходится частота вращения мотора, не ограничено 0 и может составлять положительное или отрицательное значение при условии, что значение составляет постоянное значение.
[0203] Настоящая заявка притязает на приоритет заявки на патент (Япония) №2016-083820, поданной в Патентное бюро (Япония) 19 апреля 2016 года, и содержимое этой заявки полностью содержится в данном документе по ссылке.
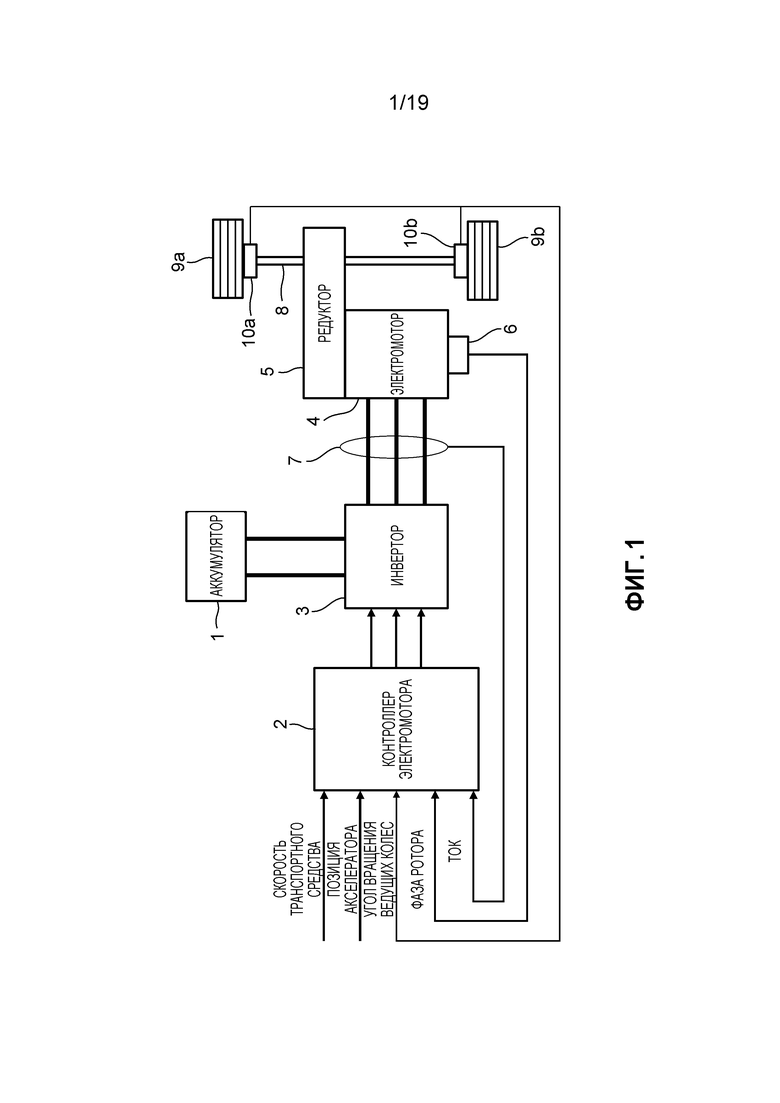

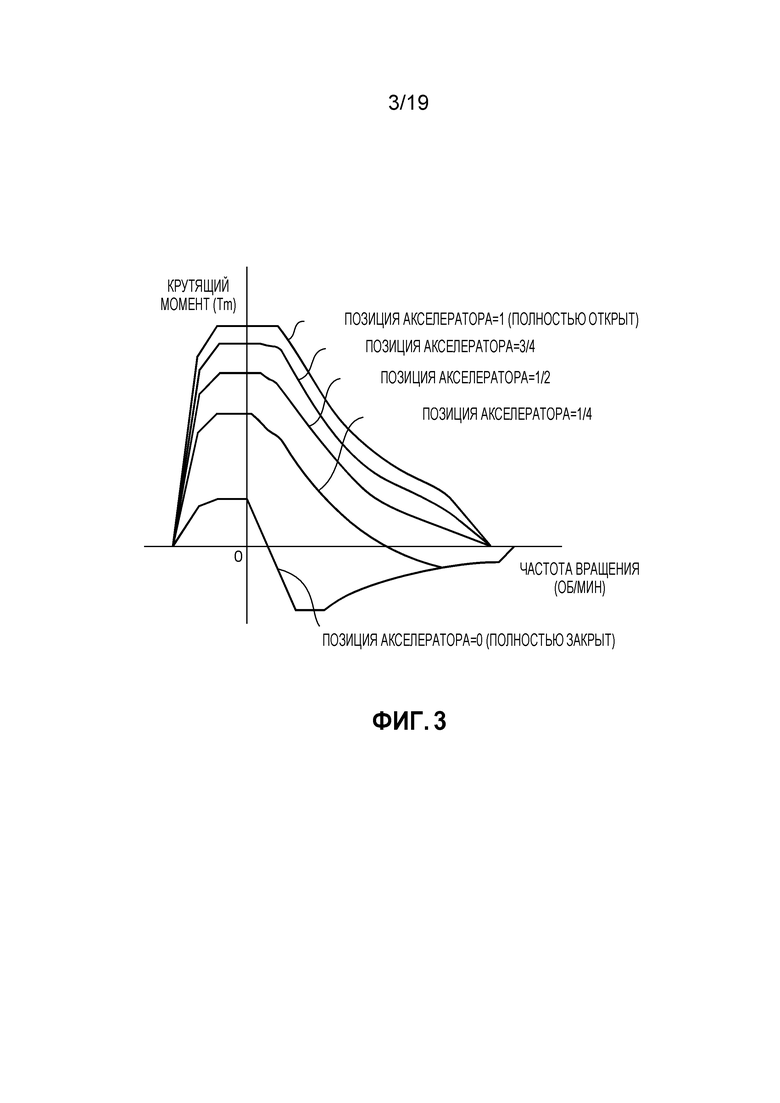



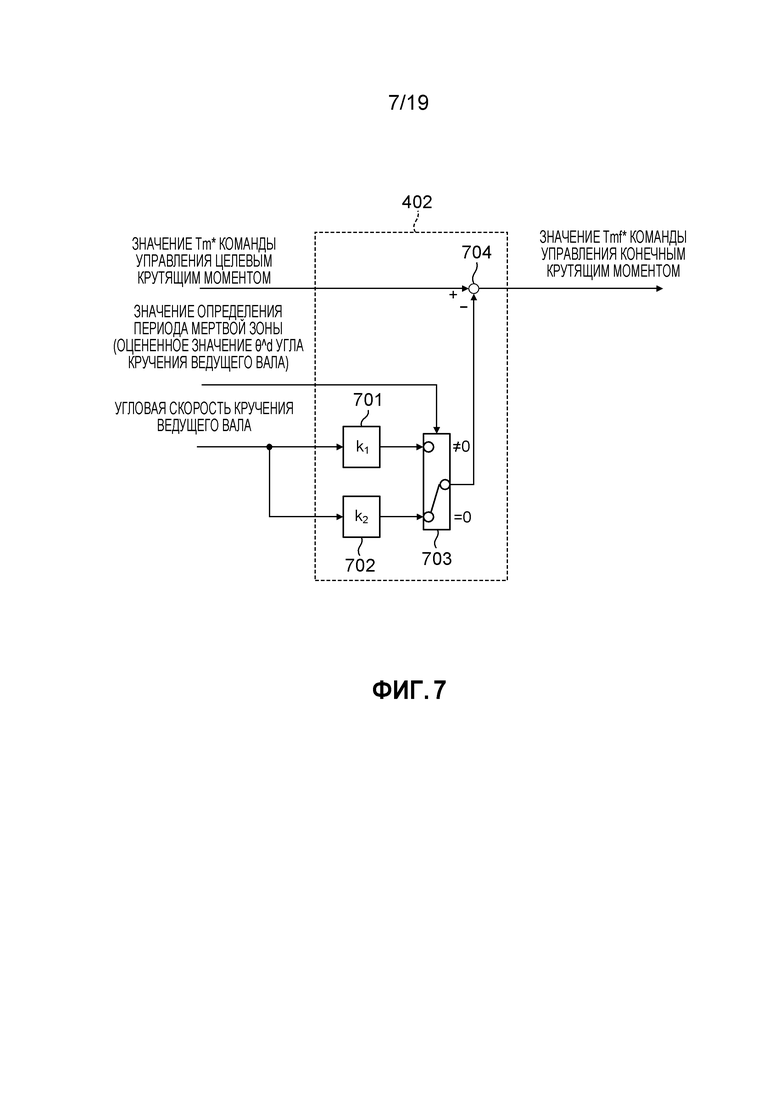


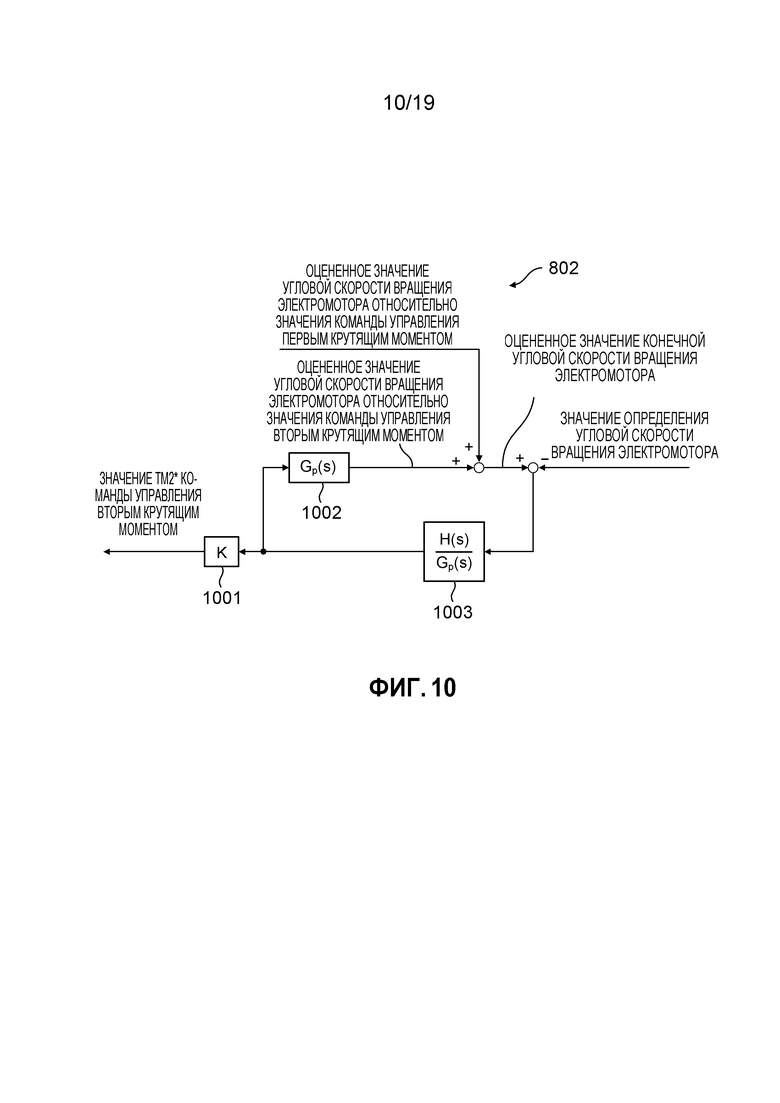
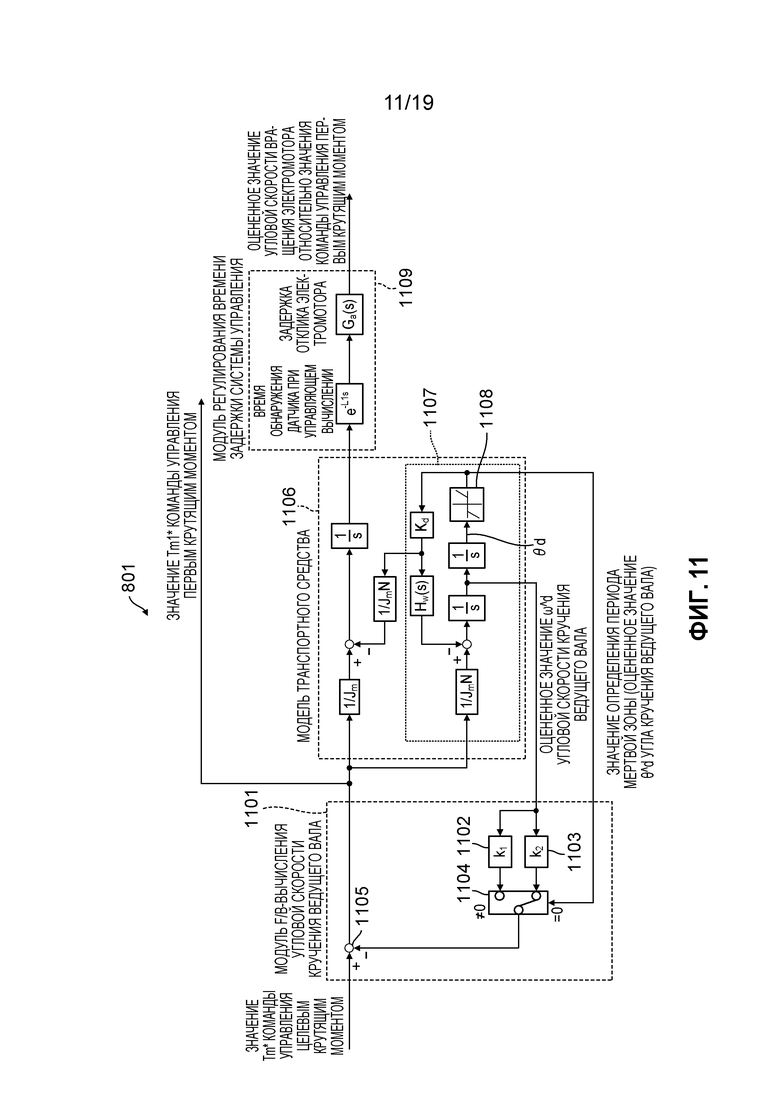


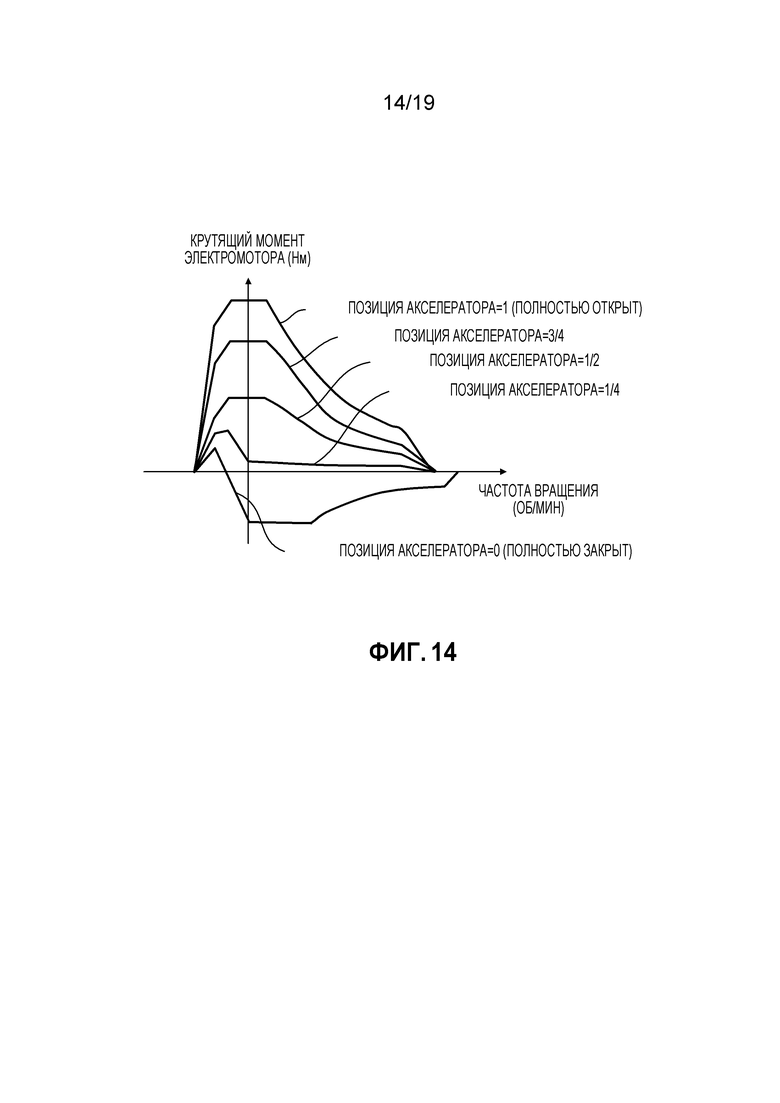



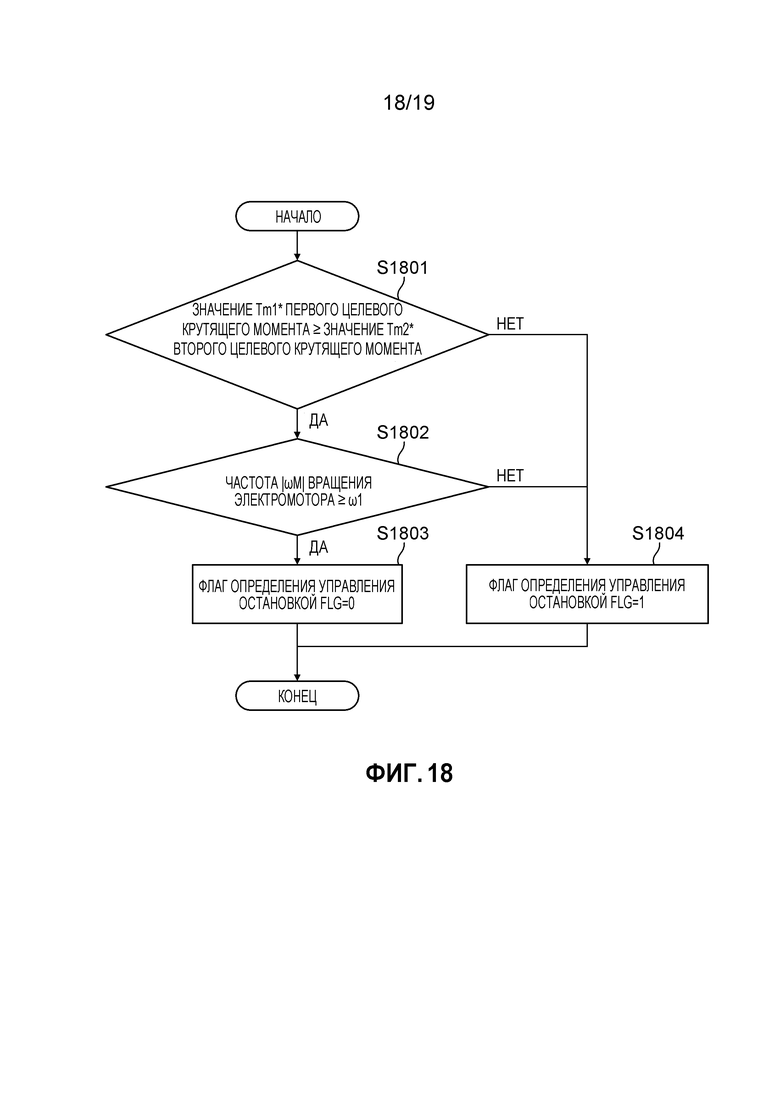

Группа изобретений отсносится к управлению тяговой системой транспортных средств с электротягой. Способ управления для электрического транспортного средства, который выполнен с возможностью управления крутящим моментом мотора, заключается в следующем. Вычисляют значение команды управления конечным крутящим моментом на основании значения целевого крутящего момента и значения, полученного посредством умножения угловой скорости кручения ведущего вала на усиление обратной связи. Оценивают посредством использования модели транспортного средства период мертвой зоны, в течение которого крутящий момент мотора не передается на ведущий вал транспортного средства. Задают различные значения в качестве усиления обратной связи отдельно для периода мертвой зоны и для второго периода, в течение которого крутящий момент мотора передается на ведущий вал транспортного средства. При этом когда транспортное средство находится в состоянии непосредственно перед остановкой, задают идентичные значения усиления обратной связи для периода мертвой зоны и для второго периода. Также заявлено устройство управления крутящим моментом мотора для электрического транспортного средства. Технический результат заключается в уменьшении вибраций системы трансмиссии. 2 н. и 9 з.п. ф-лы, 19 ил.
1. Способ управления для электрического транспортного средства, который выполнен с возможностью управления крутящим моментом мотора на основании значения команды управления конечным крутящим моментом посредством вычисления значения команды управления конечным крутящим моментом таким образом, что управление демпфированием вибрации для уменьшения вибрации системы трансмиссии для передачи движущей силы транспортного средства выполняется для значения команды управления целевым крутящим моментом, заданного на основании информации о транспортном средстве, причем способ управления для электрического транспортного средства содержит этапы, на которых:
- вычисляют значение команды управления конечным крутящим моментом на основании значения команды управления целевым крутящим моментом и значения, полученного посредством умножения угловой скорости кручения ведущего вала на усиление обратной связи;
- оценивают посредством использования модели транспортного средства, которая моделирует систему трансмиссии для передачи движущей силы, период мертвой зоны, в течение которого крутящий момент мотора, выводимый из мотора, не передается в крутящий момент ведущего вала транспортного средства;
- определяют, находится ли транспортное средство в состоянии непосредственно перед остановкой транспортного средства;
- задают различные значения в качестве усиления обратной связи отдельно для периода мертвой зоны и для периода, в течение которого крутящий момент мотора передается в крутящий момент ведущего вала транспортного средства; и
- когда транспортное средство находится в состоянии непосредственно перед остановкой транспортного средства, задают значение, идентичное значениям усиления обратной связи для периода мертвой зоны и для периода, в течение которого крутящий момент мотора передается в крутящий момент ведущего вала транспортного средства.
2. Способ управления для электрического транспортного средства по п. 1, в котором угловая скорость кручения ведущего вала вычисляется из отклонения между угловой скоростью вращения ведущих колес и преобразованным значением ведущего вала угловой скорости вращения мотора.
3. Способ управления для электрического транспортного средства по п. 1, в котором:
- угловая скорость кручения ведущего вала представляет собой оцененное значение угловой скорости кручения ведущего вала, которое оценивается из значения команды управления целевым крутящим моментом посредством использования модели транспортного средства;
- оцененное значение угла кручения ведущего вала вычисляется из значения команды управления целевым крутящим моментом посредством использования модели транспортного средства и
- значение команды управления конечным крутящим моментом задается на основании значения команды управления целевым крутящим моментом, оцененного значения угла кручения ведущего вала и значения, полученного посредством умножения оцененного значения угловой скорости кручения ведущего вала на усиление обратной связи.
4. Способ управления для электрического транспортного средства по п. 3, в котором:
- период мертвой зоны оценивается посредством использования модуля оценки периодов мертвой зоны, включенного в модель транспортного средства; и
- оцененное значение угловой скорости кручения ведущего вала оценивается посредством использования модуля оценки периодов мертвой зоны, включенного в модель транспортного средства.
5. Способ управления для электрического транспортного средства по любому из пп. 1-4, в котором усиление обратной связи для периода мертвой зоны задается равным значению, меньшему усиления обратной связи для периода, в течение которого крутящий момент мотора передается в крутящий момент ведущего вала транспортного средства.
6. Способ управления для электрического транспортного средства по любому из пп. 1-4, в котором в модель транспортного средства добавлен задерживающий элемент, включенный в систему управления.
7. Способ управления для электрического транспортного средства по п. 6, в котором задерживающий элемент, включенный в систему управления, включает в себя по меньшей мере одну временную задержку из временной задержки, вызываемой, когда определяется состояние транспортного средства и выполняется заданный процесс, временной задержки, требуемой для вычисления до тех пор, пока значение команды управления конечным крутящим моментом не вычислено из значения команды управления целевым крутящим моментом, и временной задержки до тех пор, пока крутящий момент мотора фактически не формируется, относительно значения команды управления конечным крутящим моментом.
8. Способ управления для электрического транспортного средства по любому из пп. 1-4, содержащий этапы, на которых:
- оценивают возмущающий крутящий момент, прикладываемый к мотору;
- определяют параметр частоты вращения, пропорциональный скорости движения транспортного средства;
- вычисляют значение первого целевого крутящего момента в качестве значения команды управления целевым крутящим моментом;
- вычисляют значение второго целевого крутящего момента, которое сходится к возмущающему крутящему моменту наряду с уменьшением параметра частоты вращения;
- сравнивают абсолютную величину значения первого целевого крутящего момента с абсолютной величиной значения второго целевого крутящего момента; и
- когда значение второго целевого крутящего момента превышает значение первого целевого крутящего момента, задают в качестве значения команды управления конечным крутящим моментом значение, полученное посредством выполнения управления демпфированием вибрации для значения второго целевого крутящего момента и определения, что транспортное средство находится в состоянии непосредственно перед остановкой транспортного средства.
9. Способ управления для электрического транспортного средства по любому из пп. 1-4, содержащий этапы, на которых:
- оценивают возмущающий крутящий момент, прикладываемый к мотору;
- определяют параметр частоты вращения, пропорциональный скорости движения транспортного средства; и
- когда крутящий момент мотора сходится к возмущающему крутящему моменту наряду с уменьшением параметра частоты вращения, определяют, что транспортное средство находится в состоянии непосредственно перед остановкой транспортного средства.
10. Способ управления для электрического транспортного средства по любому из пп. 1-4, содержащий этапы, на которых:
- определяют параметр частоты вращения, пропорциональный скорости движения транспортного средства;
- когда абсолютное значение параметра частоты вращения составляет заданное значение или меньше, определяют то, что транспортное средство находится в состоянии непосредственно перед остановкой транспортного средства.
11. Устройство управления для электрического транспортного средства, которое выполнено с возможностью управления крутящим моментом мотора на основании значения команды управления конечным крутящим моментом посредством вычисления значения команды управления конечным крутящим моментом таким образом, что выполняется управление демпфированием вибрации для уменьшения вибрации системы трансмиссии для передачи движущей силы транспортного средства для значения команды управления целевым крутящим моментом, заданного на основании информации о транспортном средстве, причем устройство управления для электрического транспортного средства содержит:
- модуль вычисления значений команд управления конечным крутящим моментом, выполненный с возможностью вычисления значения команды управления конечным крутящим моментом на основании значения команды управления целевым крутящим моментом и значения, полученного посредством умножения угловой скорости кручения ведущего вала на усиление обратной связи;
- модуль оценки периодов мертвой зоны, выполненный с возможностью оценки периода мертвой зоны, в течение которого крутящий момент мотора, выводимый из мотора, не передается в крутящий момент ведущего вала транспортного средства, посредством использования модели транспортного средства, которая моделирует систему трансмиссии для передачи движущей силы, и
- модуль определения состояния непосредственно перед остановкой, выполненный с возможностью определения, находится ли транспортное средство в состоянии непосредственно перед остановкой транспортного средства, при этом
- различные значения в качестве усиления обратной связи задаются отдельно для периода мертвой зоны и для периода, в течение которого крутящий момент мотора передается в крутящий момент ведущего вала транспортного средства,
- когда транспортное средство находится в состоянии непосредственно перед остановкой транспортного средства, задается значение, идентичное значениям усиления обратной связи для периода мертвой зоны и для периода, в течение которого крутящий момент мотора передается в крутящий момент ведущего вала транспортного средства.
| WO 2013157315 A1, 24.10.2013 | |||
| US 2012078456 A1, 29.03.2012 | |||
| US 2011077835 A1, 31.03.2011 | |||
| JP 2007107539 A, 26.04.2007 | |||
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ, ПОДКЛЮЧЕННЫМИ ПАРАЛЛЕЛЬНО К ОДНОМУ ИНВЕРТОРУ | 2010 |
|
RU2428326C1 |

