ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к устройству управления вращающейся машины переменного тока, способной получать положение ротора вращающейся машины переменного тока, такой как, например, асинхронная машина и синхронная машина, без использования датчика положения.
УРОВЕНЬ ТЕХНИКИ
[0002] При управлении вращающейся машиной переменного тока для вращения вращающейся машины с желательной скоростью на выходе или скоростью вращения обычно используется датчик скорости или датчик положения. Этот способ включает в себя прикрепление этих датчиков, однако, увеличивает стоимость и ухудшает рабочие характеристики вследствие электропроводки. Следовательно, существует проблема, состоящая в том, что этот способ является нецелесообразным для обеспечения отказоустойчивости и при техническом обслуживании. Для решения этой проблемы существуют предложенные способы обнаружения положения магнитного полюса и скорости вращения вращающейся машины переменного тока без использования датчика.
[0003] Из этих способов имеется способ использования индуктивного напряжения, и этот способ, главным образом, является предпочтительным при работе в области высоких скоростей, в которой индуктивное напряжение является высоким. Между тем, для области скоростей, в которой трудно использовать индуктивное напряжение, например, в области нулевой скорости или низких скоростей, существует способ оценки положения магнитного полюса с использованием явнополюсности индуктивности путем приложения к вращающейся машине переменного тока напряжения или тока на частоте, отличающейся от основной частоты.
Например, в изобретении, описанном в патентной литературе 1 (PTL 1), раскрыт способ оценки положения магнитного полюса путем приложения к вращающейся машине переменного тока высокочастотного переменного напряжения так, чтобы амплитуда тока высокой частоты, текущего в ортогональном направлении поданного напряжения, стала равной 0.
[0004] В изобретении, описанном в патентной литературе 2 (PTL 2), раскрыт следующий способ оценки. А именно, значение тока высокой частоты, полученное путем приложения к вращающейся машине высокочастотного переменного напряжения, преобразовывают в координату оси d-q со сдвигом фазы 45° от оцененного угла. Затем оценивают положение магнитного полюса так, чтобы значения Zdm и Zqm высокочастотного импеданса, полученные из результата преобразования, совпадали друг с другом. Кроме того, выполняют коррекцию под высокой нагрузкой путем вычитания компенсационного угла θ^r, вычисленного путем умножения составляющей крутящего момента значения команды тока на константу, пропорциональную оцененному положению магнитного полюса. Таким образом вычисляют оцененное положение θ^c.
СПИСОК БИБЛИОГРАФИЧЕСКИХ ССЫЛОК
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0005] Патентная литература 1 (PTL 1): патент Японии №3312472
Патентная литература 2 (PTL 2): JP-A-2002-291283
Патентная литература 3 (PTL 3): патент Японии № 4672236
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
[0006] В изобретении, описанном в патентной литературе 1 (PTL 1) регулируют ось, к которой приложено высокочастотное переменное напряжение, так, чтобы амплитуда ортогональной составляющей в направлении приложения высокочастотного переменного напряжения, стала равной 0. Соответственно, когда происходит насыщение индуктивности магнитным полем при протекании тока нагрузки, то оцененное положение отклоняется от фактического положения магнитного полюса.
К тому же, в изобретении, описанном в патентной литературе 2 (PTL 2), к оси прикладывают высокочастотное переменное напряжение так, чтобы высокочастотные импедансы совпадали друг с другом. Следовательно, ось, к которой приложено высокочастотное переменное напряжение и ось, на которой крутящий момент не сгенерирован, совпадают друг с другом без нагрузки. Однако, ось, к которой приложено высокочастотное переменное напряжение, отклоняется от оси, на которой крутящий момент не сгенерирован под нагрузкой, и существует проблема, состоящая в том, что такое отклонение вызывает вибрации и шумы.
РЕШЕНИЕ ЗАДАЧИ
[0007] Устройство управления вращающейся машины переменного тока из настоящего изобретения включает в себя: средство обнаружения вектора тока для обнаружения вектора тока вращающейся машины переменного тока; средство управления для приема команды вектора тока и вектора тока обнаружения в качестве входных данных и для вывода команды вектора напряжения, полученной путем суммирования команды вектора основного напряжения для приведения в действие вращающейся машины переменного тока и команды вектора переменного напряжения, являющегося переменным относительно произвольной оси; средство приложения напряжения для приложения напряжения к вращающейся машине переменного тока согласно команде вектора напряжения; средство вычисления амплитуды переменного тока для приема вектора тока, обнаруженного средством обнаружения вектора тока, в качестве входных данных, и для вычисления амплитуды переменного тока по меньшей мере одной из параллельной составляющей и ортогональной составляющей, относительно команды вектора переменного напряжения; средство генерации команды амплитуды переменного тока для генерации команды амплитуды переменного тока из команды вектора тока; и средство вычисления положения магнитного полюса для вычисления оцененного положения магнитного полюса вращающейся машины переменного тока. Устройство управления отличается тем, что средство вычисления положения магнитного полюса вычисляет оцененное положение магнитного полюса так, что амплитуда переменного тока совпадает с командой амплитуды переменного тока.
ПОЛЕЗНЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0008] Согласно изобретению, путем вычисления оцененного положения так, чтобы амплитуда переменного тока совпадала с командой амплитуды переменного тока, может быть оценено положение магнитного полюса, пока высокочастотное переменное напряжение, приложенное для оценки положения магнитного полюса, всегда сохраняется приложенным к оси, на которой не генерируется крутящий момент. Кроме того, поскольку отсутствует влияние погрешности оцененного положения, вызванное магнитным насыщением, то могут быть ослаблены вибрации и шумы вращающейся машины.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009] На Фиг. 1 приведено изображение, на котором показана общая конфигурация устройства управления вращающейся машины переменного тока из первого варианта осуществления изобретения.
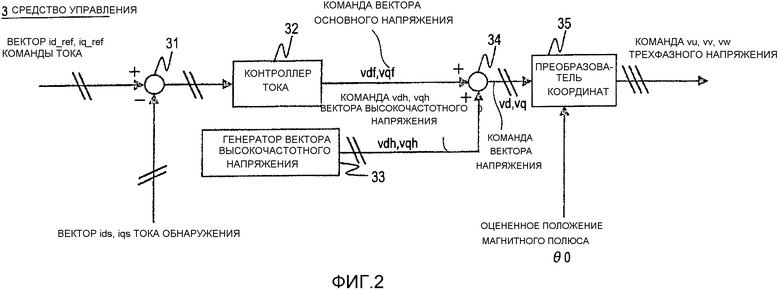
На Фиг. 2 приведен схематичный вид конфигурации, используемый для описания внутренней конфигурации средства 3 управления из первого варианта осуществления изобретения.
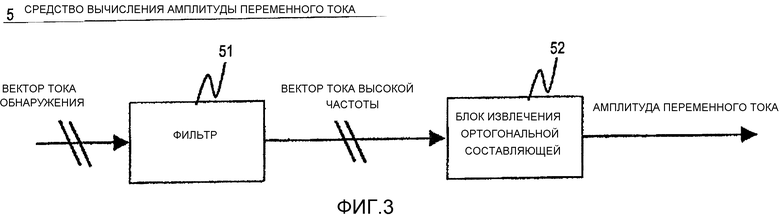
На Фиг. 3 приведен схематичный вид конфигурации, на котором показана внутренняя конфигурация средства 5 вычисления амплитуды переменного тока из первого варианта осуществления изобретения.
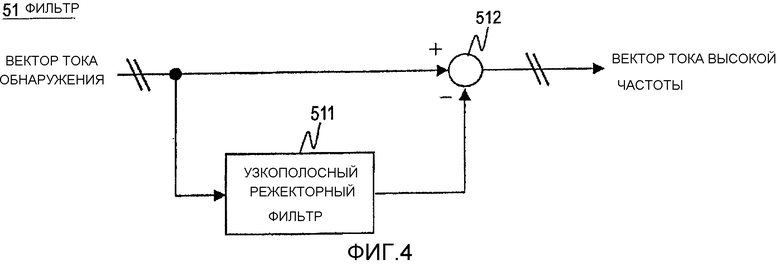
На Фиг. 4 приведено изображение, используемое для описания внутренней конфигурации фильтра 51 из Фиг. 3.
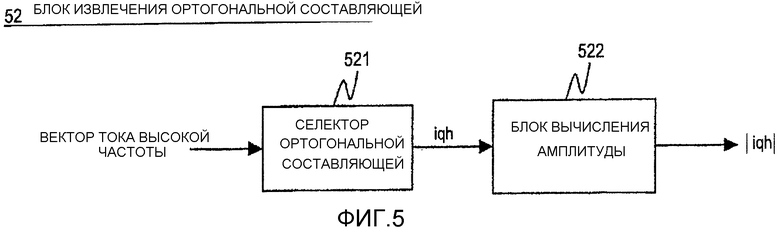
На Фиг. 5 приведено изображение, используемое для описания внутренней конфигурации блока 52 извлечения ортогональной составляющей из Фиг. 3.
На Фиг. 6 приведено изображение, используемое для описания функционирования вращающейся машины переменного тока из первого варианта осуществления изобретения посредством вектора.
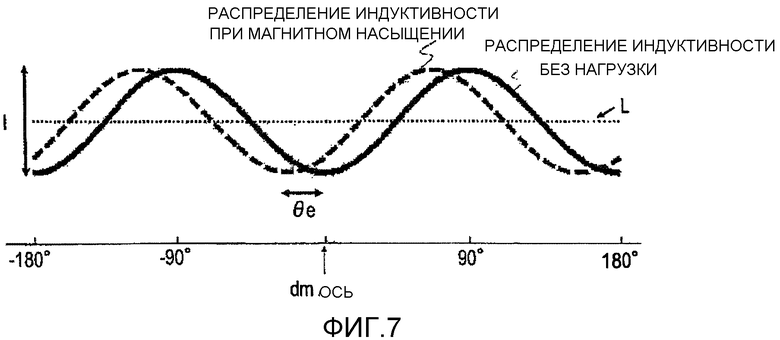
На Фиг. 7 приведено изображение, используемое для описания функционирования вращающейся машины переменного тока из первого варианта осуществления изобретения путем сравнения распределения индуктивности, возникающего под нагрузкой, с распределением индуктивности без нагрузки.
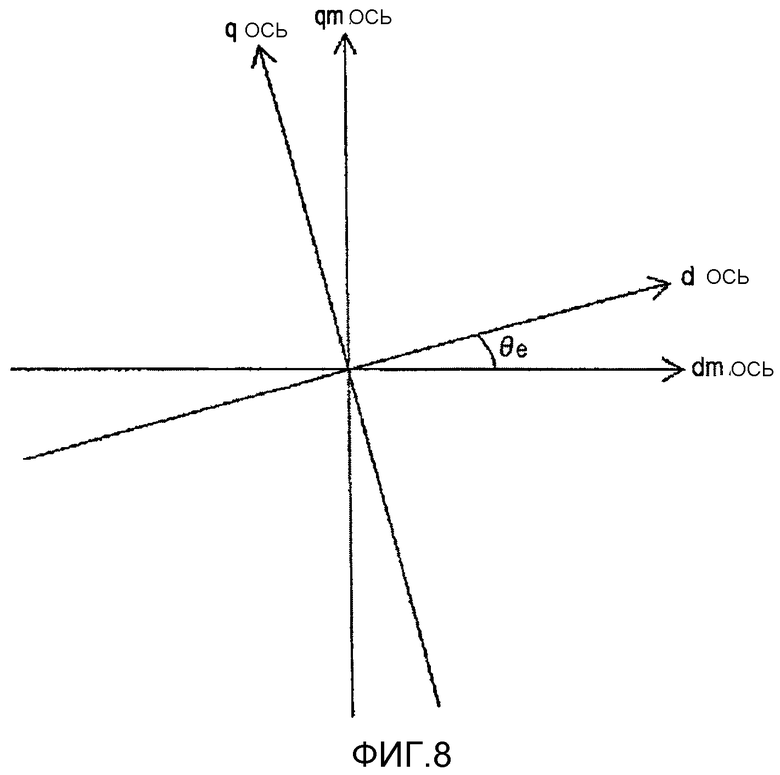
На Фиг. 8 приведено изображение, используемое для описания состояния из Фиг. 7 посредством вектора.
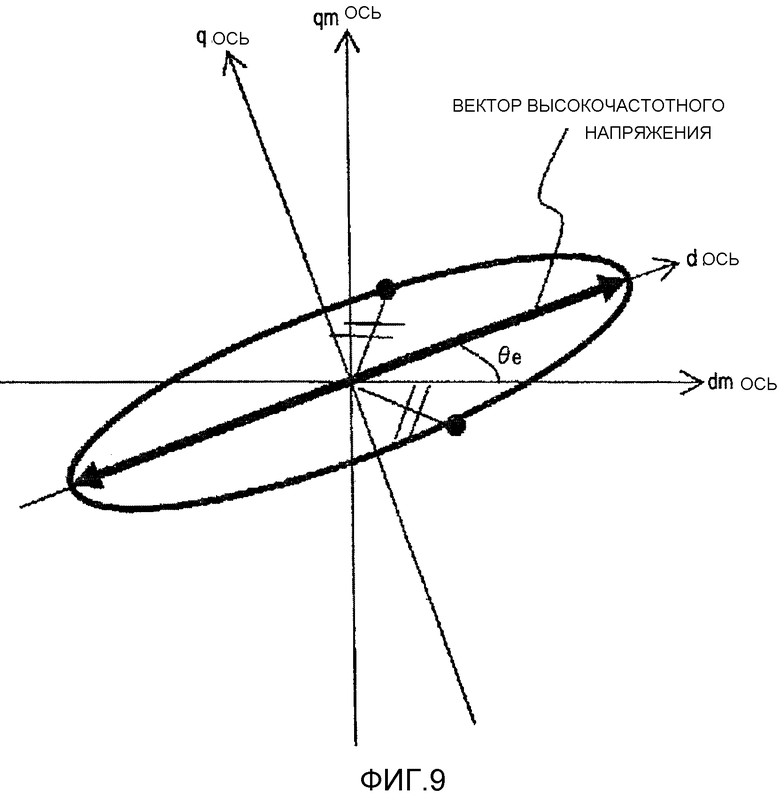
На Фиг. 9 приведено изображение, используемое для описания функционирования из патентной литературы 2 (PTL 2).
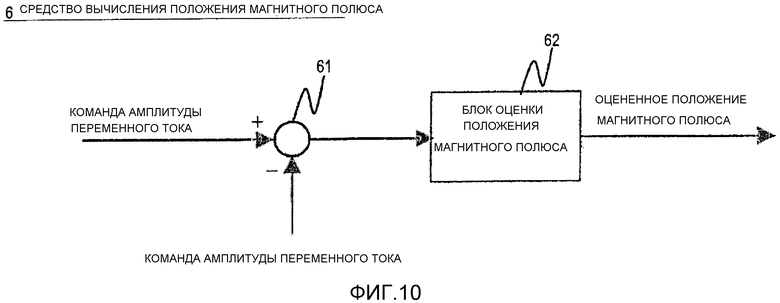
На Фиг. 10 приведен схематичный вид конфигурации, на котором показана внутренняя конфигурация средства 6 вычисления положения магнитного полюса из первого варианта осуществления изобретения.
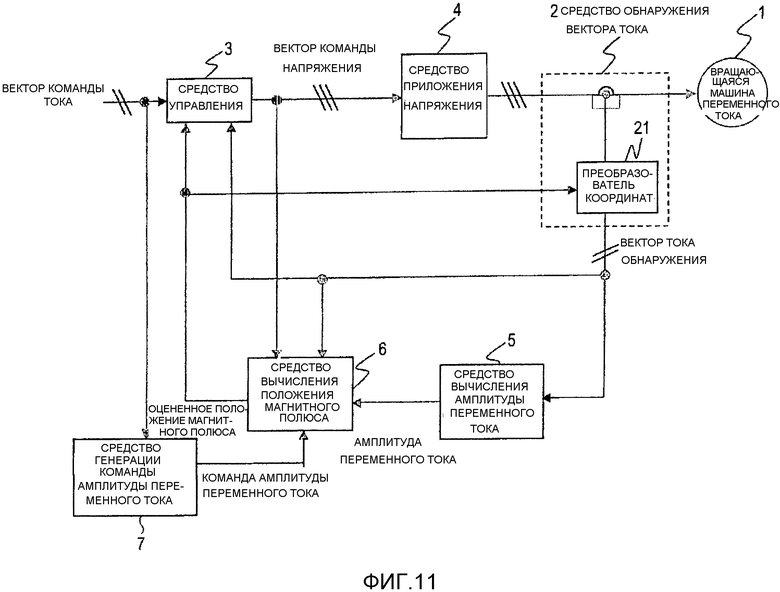
На Фиг. 11 приведено изображение, на котором показана общая конфигурация устройства управления вращающейся машины переменного тока из второго варианта осуществления изобретения.
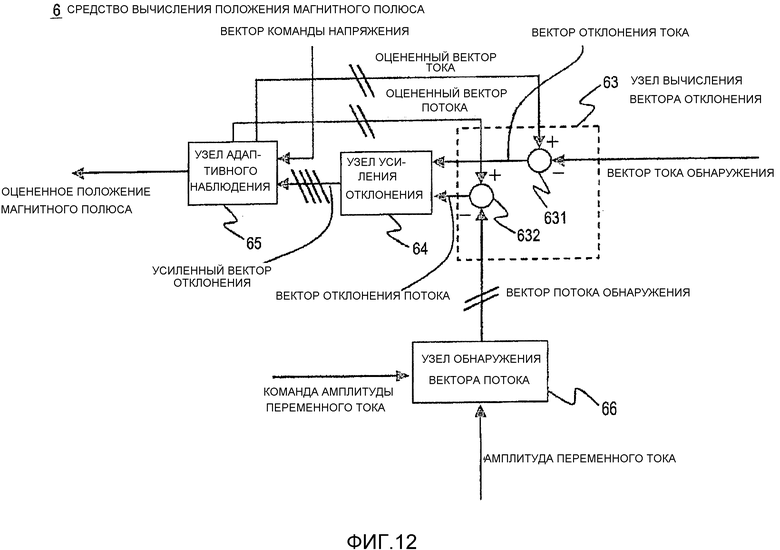
На Фиг. 12 приведен схематичный вид конфигурации, на котором показана внутренняя конфигурация средства 6 вычисления положения магнитного полюса из второго варианта осуществления изобретения.
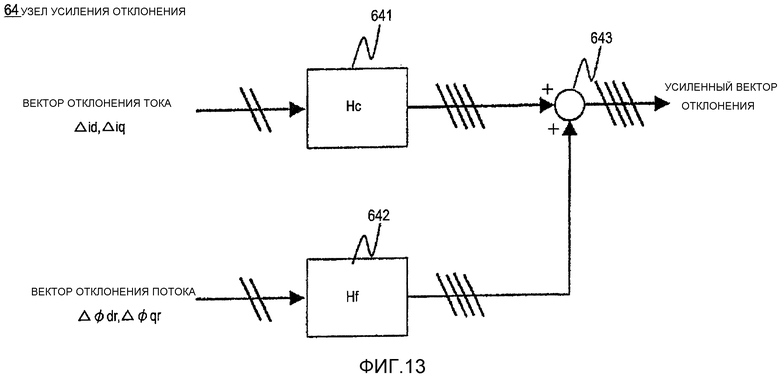
На Фиг. 13 приведен схематичный вид конфигурации, на котором показана внутренняя конфигурация узла 64 усиления отклонения из второго варианта осуществления изобретения.
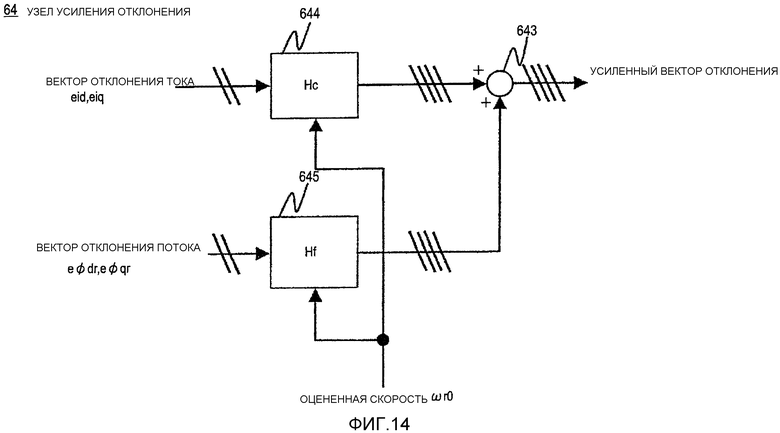
На Фиг. 14 приведен схематичный вид конфигурации, на котором показан другой пример конфигурации узла 64 усиления отклонения из второго варианта осуществления изобретения.
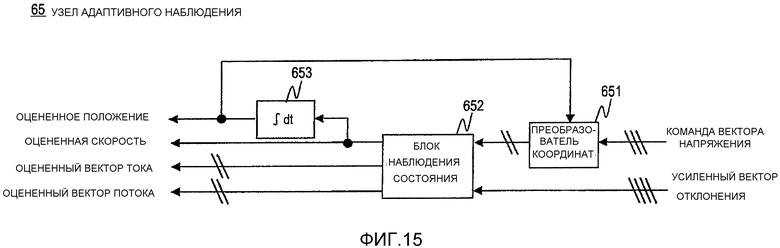
На Фиг. 15 приведен схематичный вид конфигурации, на котором показана внутренняя конфигурация узла 65 адаптивного наблюдения из второго варианта осуществления изобретения.
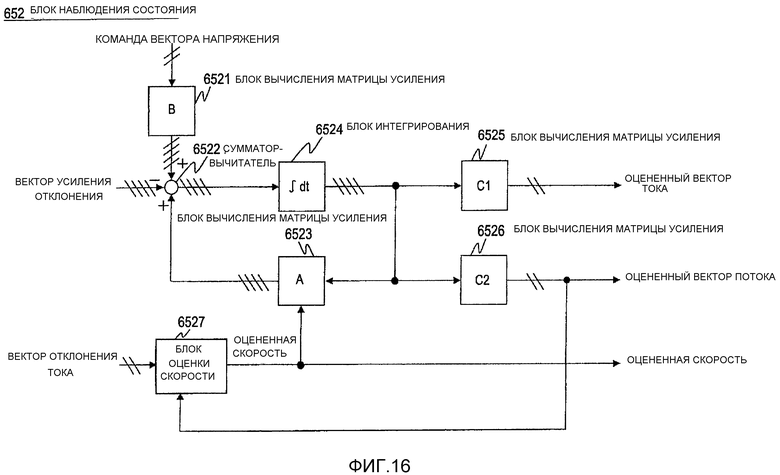
На Фиг. 16 приведен схематичный вид конфигурации, на котором показана внутренняя конфигурация блока 652 наблюдения состояния из второго варианта осуществления изобретения.
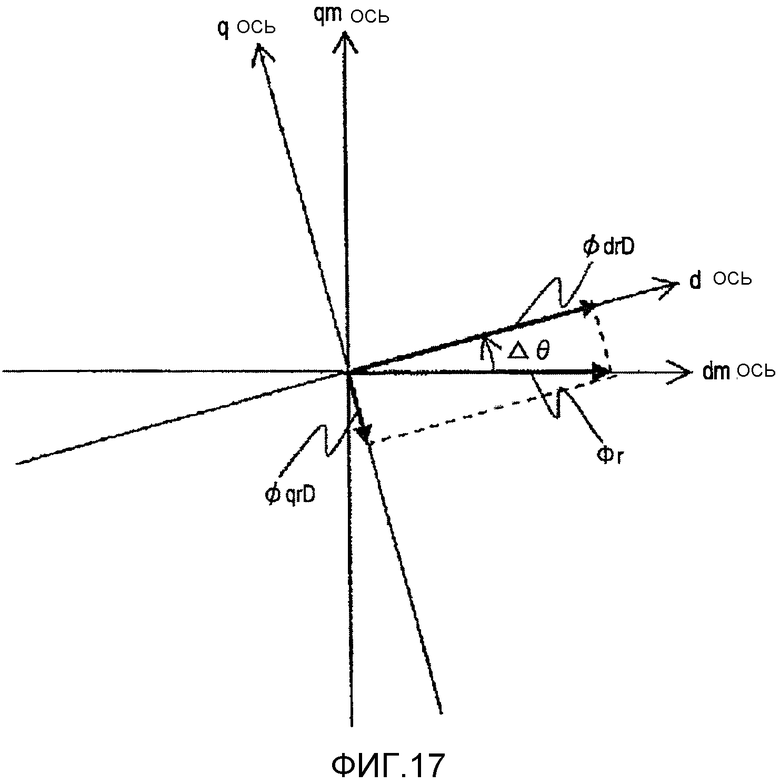
На Фиг. 17 приведено изображение, используемое для описания функционирования второго варианта осуществления изобретения посредством вектора.
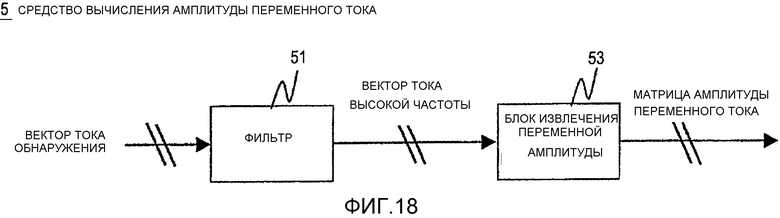
На Фиг. 18 приведен схематичный вид конфигурации, на котором показана внутренняя конфигурация средства 5 вычисления амплитуды переменного тока из второго варианта осуществления изобретения.
На Фиг. 19 приведен схематичный вид конфигурации, на котором показана внутренняя конфигурация блока 53 извлечения переменной амплитуды из второго варианта осуществления изобретения.
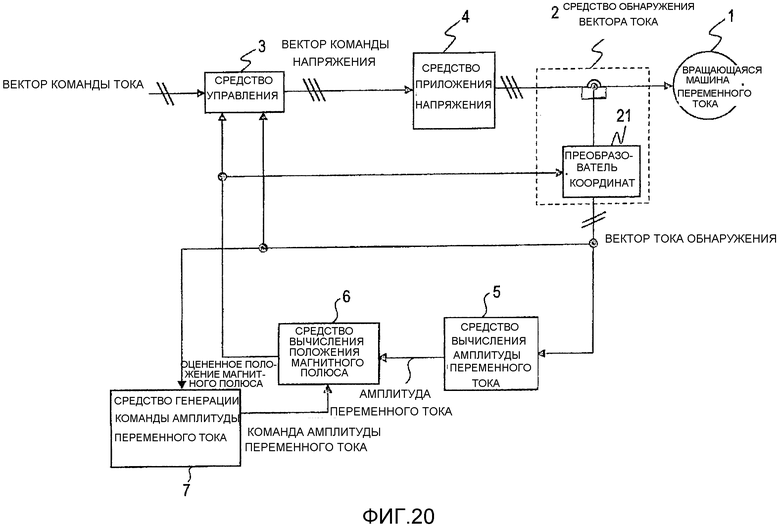
На Фиг. 20 приведено изображение, на котором показана общая конфигурация устройства управления вращающейся машины переменного тока из третьего варианта осуществления изобретения.
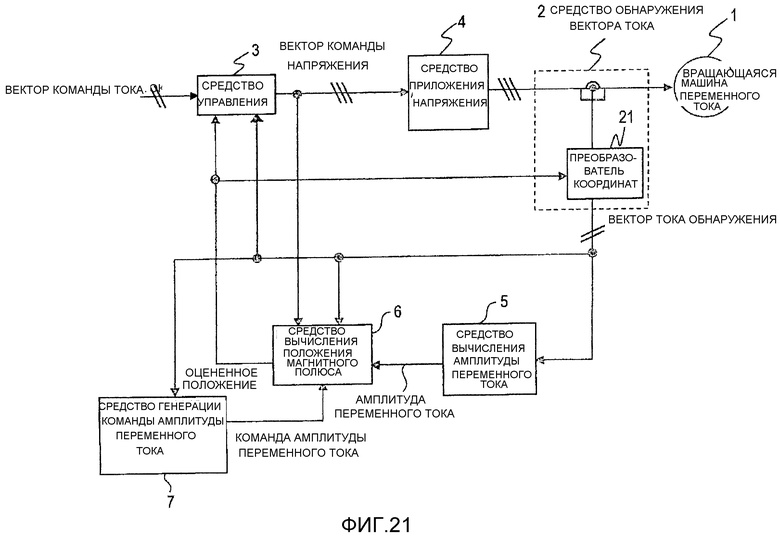
На Фиг. 21 приведено изображение, на котором показан другой пример конфигурации устройства управления вращающейся машины переменного тока из третьего варианта осуществления изобретения.
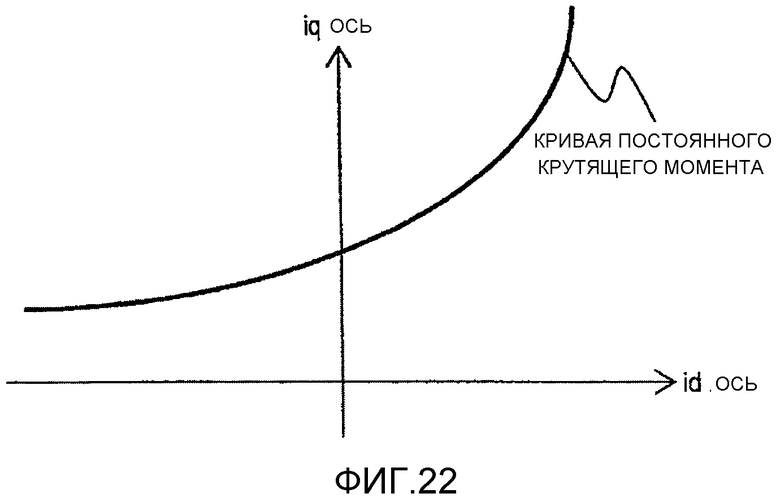
На Фиг. 22 приведено изображение, на котором показана кривая постоянного крутящего момента вращающейся машины переменного тока из четвертого варианта осуществления изобретения.
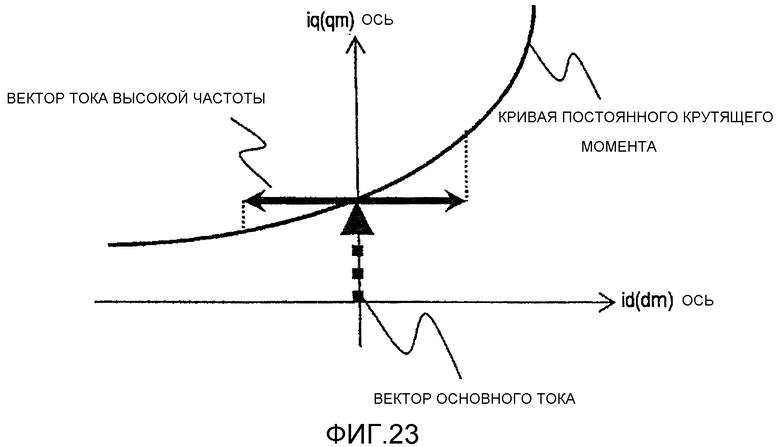
На Фиг. 23 приведено изображение, используемое для описания функционирования четвертого варианта осуществления изобретения.
На Фиг. 24 приведено изображение, используемое для описания функционирования четвертого варианта осуществления изобретения.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0010] ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
На Фиг. 1 приведено изображение, на котором показана общая конфигурация устройства управления вращающейся машины переменного тока согласно первому варианту осуществления изобретения. Со ссылкой на чертеж, вращающаяся машина 1 переменного тока представляет собой синхронный двигатель, а здесь синхронную машину с использованием постоянных магнитов. В этом варианте осуществления изобретения в качестве примера описан синхронный двигатель. Однако, следует понимать, что на том же самом принципе также может быть создано устройство управления для вращающихся машин других типов.
[0011] С вращающейся машиной 1 переменного тока соединено средство 2 обнаружения вектора тока для обнаружения вектора тока вращающейся машины 1 переменного тока и средство 4 приложения напряжения для приложения напряжения и соответствующее преобразователю мощности, такому как, например, инвертор.
Средство 2 обнаружения вектора тока обнаруживает токи iu, iv и iw трех фаз вращающейся машины 1 переменного тока и применяет преобразование координат к обнаруженным токам для получения тока на оси d-q, известной как ортогональная координата, которая вращается синхронно с ротором вращающейся машины 1 переменного тока, посредством преобразователя 21 координат с использованием описанного ниже оцененного положения θ0 магнитного полюса. Полученный таким образом ток выводят в качестве вектора (ids, iqs) тока обнаружения.
Для обнаружения токов трех фаз могут быть обнаружены токи всех трех фаз. В альтернативном варианте токи трех фаз могут быть найдены путем обнаружения токов двух фаз на том основании, что сумма токов трех фаз равна нулю. Кроме того, токи трех фаз могут быть вычислены на основании тока на шине инвертора или токов, протекающих через коммутирующие элементы, и состояний коммутирующих элементов.
[0012] Как подробно показано на изображении конфигурации из Фиг. 2, средство 3 управления вычитает вектор (ids, iqs) тока обнаружения из команды (id_ref, iq_ref) вектора тока, заданной извне посредством сумматора-вычитателя 31. Контроллер 32 тока выводит команду (vdf, vqf) вектора основного напряжения путем осуществления пропорционально-интегрального управления так, чтобы не было какого-либо отклонения между командой вектора тока, которая является выходным сигналом сумматора-вычитателя 31, и вектором тока обнаружения. Генератор 33 вектора высокочастотного переменного напряжения выводит команду (vdh, vqh) вектора высокочастотного переменного напряжения на оси d-q.
[0013] В этом варианте осуществления изобретения задано, что vqh=0, вследствие чего переменное напряжение приложено только в направлении оси d. Сумматор-вычитатель 34 выводит команду (vd, vq) вектора напряжения, которая получена путем суммирования команды вектора основного напряжения и команды вектора высокочастотного переменного напряжения. Преобразователь 35 координат преобразовывает команду (vd, vq) вектора напряжения, которая является выходным сигналом сумматора-вычитателя 34, в команду (vu, vv, vw) вектора трехфазного напряжения путем преобразования из оси d-q в стационарную координату с использованием оцененного положения θ0 и выводит результат преобразования.
В этом варианте осуществления изобретения средство 3 управления применяет способ генерации команды вектора напряжения с использованием пропорционально-интегрального управления. Однако, следует понимать, что средство 3 управления, применяющее, например, управление V/f, также может быть создано на том же самом принципе путем добавления команды вектора высокочастотного переменного напряжения.
[0014] Средство 4 приложения напряжения представляет собой преобразователь мощности, такой как, например, инвертор, и оно подает напряжение на вращающуюся машину 1 переменного тока согласно команде вектора напряжения, выведенной из средства 3 управления. Как подробно показано на изображении конфигурации из Фиг. 3, средство 5 вычисления амплитуды переменного тока извлекает вектор тока высокой частоты, полученный из вектора тока обнаружения, посредством фильтра 51, вычисляет амплитуду ортогональной составляющей тока высокой частоты посредством блока 52 извлечения ортогональной составляющей и выводит результат вычислений в качестве амплитуды переменного тока.
[0015] Фильтр 51 представляет собой фильтр, который извлекает вектор тока высокой частоты из вектора тока обнаружения, им может являться фильтр любого типа, если этот фильтр способен извлекать ту же самую частотную составляющую, что и частотная составляющая команды (vdh, vqh) вектора высокочастотного переменного напряжения, из вектора тока обнаружения. Например, как показано на Фиг. 4, вектор тока высокой частоты извлекают с использованием узкополосного режекторного фильтра 511, известного как заградительный фильтр с узкой полосой заграждения. Узкополосный режекторный фильтр 511 из Фиг. 4 применяет узкополосную режекторную фильтрацию для удаления угловой частоты ωh вектора высокочастотного переменного напряжения, выраженной приведенным ниже уравнением (1), к вектору тока обнаружения, и удаляет составляющую угловой частоты ωh из вектора тока обнаружения. Сумматор-вычитатель 512 вычисляет вектор тока высокой частоты для составляющей угловой частоты ωh по вектору тока обнаружения путем вычитания выходного сигнала узкополосного режекторного фильтра 511 из вектора тока обнаружения. В приведенном ниже уравнении (1) s - оператор Лапласа, а qx - глубина узкополосного режекторного фильтра.
[0016] [Ур. 1]
[0017] На Фиг. 5 приведено изображение, на котором показана конфигурация блока 52 извлечения ортогональной составляющей из Фиг. 3. Блок 52 извлечения ортогональной составляющей выбирает только лишь iqh, который представляет собой вектор тока высокой частоты в направлении, ортогональном к оси d, путем умножения вектора (idh, iqh) тока высокой частоты на матрицу (0,1)T посредством селектора 521 ортогональной составляющей. Блок 522 вычисления амплитуды выводит |iqh|, который представляет собой величину (амплитуду) iqh, вычисленную согласно приведенному ниже уравнению (2). В приведенном ниже уравнении (2) T - период iqh.
[0018] [Ур. 2]
Выше была описана конфигурация средства 5 вычисления амплитуды переменного тока.
[0019] Вновь со ссылкой на Фиг. 1, средство 6 вычисления положения магнитного полюса вычисляет оцененное положение магнитного полюса согласно амплитуде переменного тока и команде амплитуды переменного тока, выведенной из описанного ниже средства 7 генерации команды амплитуды переменного тока.
Сначала приведено описание способа вычисления положения магнитного полюса путем приложения высокочастотного переменного напряжения. Сначала приведено описание математической формулы, выражающей вектор тока высокой частоты, протекающего через вращающуюся машину 1 переменного тока, когда описанный выше генератор 33 вектора высокочастотного переменного напряжения выводит векторы vdh и vqh высокочастотного переменного напряжения.
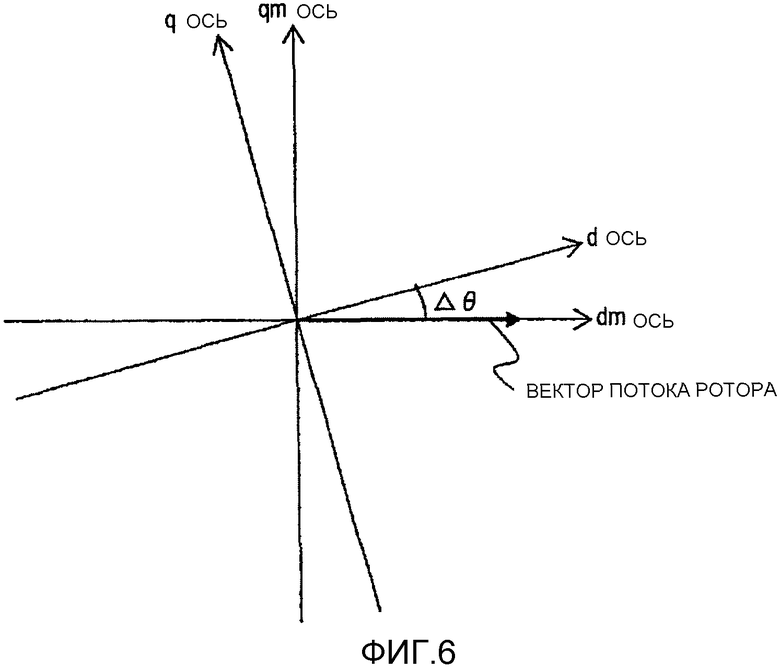
[0020] Как показано на Фиг, 6, пусть ось dm является направлением вектора потока ротора, ось qm является направлением, ортогональным к оси dm, ось d является направлением, указанным оцененным положением θ0 магнитного полюса, полученным путем приложения вектора высокочастотного переменного напряжения, а ось q является направлением, ортогональным к оси d. К тому же, пусть Δθ является отклонением между осью d и осью dm. На Фиг. 6 показано состояние, когда вращающаяся машина 1 переменного тока работает без нагрузки и функционирование осуществляют так, чтобы ось d постоянно совпадала с осью dm. На Фиг. 6 приведено изображение, на котором показан случай, в котором отклонение Δθ генерируется мгновенно. В этом случае математическая формула вращающейся машины 1 переменного тока, когда векторы vdh и vqh высокочастотного переменного напряжения приложены, соответственно, к оси d и к оси q, выражается приведенным ниже уравнением (3). В этом уравнении P представляет собой дифференциальный оператор.
[0021] [Ур. 3]

где 
 - сопротивление обмотки статора вращающейся машины 1 переменного тока,
- сопротивление обмотки статора вращающейся машины 1 переменного тока,  - индуктивность в направлении оси dm,
- индуктивность в направлении оси dm,  - индуктивность в направлении оси qm,
- индуктивность в направлении оси qm,  - отклонение между положением оси dm и положением оси d,
- отклонение между положением оси dm и положением оси d,  - скорость вращения,
- скорость вращения,  - величина вектора потока ротора,
- величина вектора потока ротора,  - ток высокой частоты по оси d, а
- ток высокой частоты по оси d, а  - ток высокой частоты по оси q.
- ток высокой частоты по оси q.
[0022] В том случае, когда положение магнитного полюса обнаружено с использованием высокочастотного переменного напряжения, область высокой скорости является нецелесообразной с точки зрения эффективности работы, коэффициента использования напряжения и максимального тока, поскольку напряжение и ток сгенерированы с высокой частотой. Следовательно, предпочтительно использовать высокочастотное переменное напряжение при нулевой скорости или низкой скорости. К тому же, предпочтительно использовать средство обнаружения положения магнитного полюса с использованием известного блока адаптивного наблюдения в области высоких скоростей. При этом, здесь предполагают, что при нулевой скорости к низкой скорости используют высокочастотное напряжение. В этом случае, учитывая, что скорость вращения ωr=0, из приведенного выше уравнения (3) получают следующее уравнение (4).
[0023] [Ур. 4]
Кроме того, второй член справа является дифференциалом тока высокой частоты. Поскольку дифференциал тока высокой частоты увеличен на коэффициент угловой частоты ωh высокочастотного напряжения, то получают, что второй член справа >> первого члена справа, и, следовательно, первым членом справа можно пренебречь. Следовательно, может быть получено приведенное ниже уравнение (5).
[Ур. 5]

[0024] Предположим, что вектор высокочастотного напряжения задан приведенным ниже уравнением (6). В этом случае путем подстановки приведенного ниже уравнения (6) в приведенное выше уравнение (5) и интегрирования обеих частей, векторы idh и iqh тока высокой частоты выражаются приведенным ниже уравнением (7).
[Ур. 6]
[Ур. 7]
[0025] Для оценки положения магнитного полюса вычисляют θ0, вследствие чего отклонение Δθ становится равным 0. С использованием амплитудной составляющей тока высокой частоты из приведенного выше уравнения (7) Δθ может быть выражено как функция амплитуды тока. Здесь посредством использования амплитуды |iqh| ортогональной составляющей iqh тока высокой частоты может быть получено приведенное ниже уравнение (8) из приведенного выше уравнения (7).
[Ур. 8]
[0026] К тому же, уравнение (8) может быть перезаписано в виде приведенного ниже уравнения (9) относительно Δθ.
[Ур. 9]
Из приведенного выше уравнения (9) понятно, что приближение Δθ к нулю эквивалентно приближению |iqh| к нулю. Следовательно, оцененное положение θ0 может быть выражено приведенным ниже уравнением (10) с использованием пропорционально-интегрального блока.
[0027] [Ур. 10]

Следует отметить, что угловая частота ωh высокочастотного напряжения и амплитуда Vh высокочастотного напряжения могут быть установлены произвольно в генераторе 33 вектора высокочастотного переменного напряжения, и, следовательно, являются известными. К тому же, L и I могут быть найдены из Ld и Lq, как в случае, когда учитывается условие из приведенного выше уравнения (3), и Ld и Lq могут быть найдены путем измерения обоих из них заранее. Следовательно, L и I также являются известными.
Как было описано выше, отклонение Δθ от оси, к которой приложен вектор высокочастотного напряжения, может быть вычислено на основании |iqh|.
[0028] Теперь приведено описание погрешности оцененного положения вследствие магнитного насыщения индуктивности под нагрузкой.
Как было описано выше, под нагрузкой происходит магнитное насыщение индуктивности вращающейся машины переменного тока. Следовательно, предполагая, что погрешность положения θe генерируется при удельной нагрузке, как показано на Фиг. 7, распределение индуктивности при удельной нагрузке изменяется на θe относительно распределения без нагрузки. Для выражения этого расхождения посредством приведенного выше уравнения (3) Ldc, Lqc и Ldqc переопределяют посредством уравнения (11) следующим образом:
[Ур. 11]
Путем развития приведенного выше уравнения (3) с использованием вышеупомянутого уравнения (11) может быть получено приведенное ниже уравнение (12). К тому же, величина |iqh| вектора iqh тока высокой частоты выражается приведенным ниже уравнением (13).
[0029] [Ур. 12]

[Ур. 13]
Путем формирования пропорционально-интегрального блока из приведенного выше уравнения (10) так, чтобы |iqh| приближался к нулю, из приведенного выше уравнения (13) понятно, что (Δθ-θe) приближается к нулю. В частности, поскольку Δθ сходится к θe, как показано на Фиг. 8, то ось d, указанную оцененным положением θ0 магнитного полюса, обнаруживают в положении с отклонением на θe от оси dm в качестве фактического положения магнитного полюса.
[0030] В изобретении, описанном в патентной литературе 2 (PTL 2), вводят поправку оцененного положения магнитного полюса с использованием поправочного угла. Однако, как показано на Фиг. 9, поскольку к оси приложено высокочастотное напряжение, вследствие чего высокочастотные импедансы осей, отстоящие на +45° от оцененного положения θ0 магнитного полюса, совпадают друг с другом, то ось (ось d), к которой приложено высокочастотное напряжение, отклоняется от оси (оси dm), на которой крутящий момент не генерируется. Такое отклонение становится предпосылкой вибраций и шумов вращающейся машины, вследствие крутящего момента, вызванного высокочастотным напряжением.
[0031] Чтобы преодолеть такое неудобство, ось, к которой приложен вектор высокочастотного переменного напряжения, всегда устанавливают как ось dm при вычислении оцененного положения магнитного полюса средством 6 вычисления положения магнитного полюса для подавления возникновения вибраций и шумов вращающейся машины вследствие крутящего момента, вызванного высокочастотным напряжением. Короче говоря, это означает приближение отклонения Δθ между осью dm, которая является фактическим положением магнитного полюса, и осью d, которая является оцененным положением магнитного полюса, к нулю. Вследствие того, что Δθ приближения к нулю в уравнении (13), |iqh| выражается уравнением (14) следующим образом.
[Ур. 14]
[0032] То есть, когда значение |iqh| приблизительно равно значению правой части приведенного выше уравнения (14), Δθ приближается к нулю. В этом случае, поскольку θe является неизвестным, то правая часть приведенного выше уравнения (14) не может быть вычислена в реальном времени. Однако, поскольку θe имеет такую характеристику, что меняется в зависимости от величины тока нагрузки, то θe может быть измерено заранее. Следовательно, команда |iqh_ref| амплитуды переменного тока на выходе описанного ниже средства 7 генерации команды амплитуды переменного тока, задана приведенным ниже уравнением (15), и оцененное положение θ0 магнитного полюса сформировано приведенным ниже уравнением (16) с использованием пропорционально-интегрального блока, вследствие чего |iqh_ref| совпадает с |iqh|. Соответственно, |iqh| может быть аппроксимирован значением |iqh_ref| команды. Следовательно, не только за счет совпадения оси d, которая является оцененным положением магнитного полюса, с осью dm, но также и за счет установки оси dm в качестве направления, к которому приложен вектор высокочастотного напряжения, может быть подавлено возникновение вибраций и шумов вращающейся машины вследствие крутящего момента. Описание способа задания |iqh_ref| приведено ниже.
[0033] [Ур. 15]
[Ур. 16]

Выше был описан способ вычисления оценки положения магнитного полюса средством 6 вычисления положения магнитного полюса.
[0034] Теперь будет приведено описание конфигурации средства 6 вычисления положения магнитного полюса.
Как показано на Фиг. 10, средство 6 вычисления положения магнитного полюса сформировано из сумматора-вычитателя 61, который выводит отклонение между командой амплитуды переменного тока и амплитудой переменного тока, и блока 62 оценки положения магнитного полюса, который выводит оцененное положение магнитного полюса из отклонения. Блок 62 оценки положения магнитного полюса выводит оцененное положение магнитного полюса в соответствии с приведенным выше уравнением (16) на основании значения отклонения, введенного в него из сумматора-вычитателя 61. Конфигурация средства 6 вычисления положения магнитного полюса была описана выше.
[0035] Кроме того, средство 7 генерации команды амплитуды переменного тока генерирует команду |iqh_ref| амплитуды переменного тока путем умножения команды (id_ref, iq_ref) вектора тока на (Kd, Kq)T (T означает транспонированную матрицу), который является транспонированной матрицей значения (Kd, Kq) усиления. Значением (Kd, Kq) усиления может являться простое постоянное значение. В альтернативном варианте путем изменения значения (Kd, Kq) усиления согласно команде вектора тока с использованием таблицы значение команды амплитуды переменного тока может являться более точным. К тому же, команда амплитуды переменного тока может быть сгенерирована только из составляющей крутящего момента команды вектора тока путем задания Kd=0.
[0036] Что касается значения усиления, то значение |iqh|, полученное в соответствии с приведенным выше уравнением (2), когда к вращающейся машине 1 переменного тока приложены вектор высокочастотного переменного напряжения и ток нагрузки, измеряют заранее, и значение усиления определяют исходя из команды вектора тока и |iqh|. Таким образом, становится возможным найти значение |iqh_ref| команды амплитуды тока независимо от неизвестного θe. Что касается измерения, то значение команды для команды вектора тока может быть найдено аналитически, например, путем электромагнитного анализа, или это значение может быть измерено с использованием реальной машины. Путем измерения этих значений заранее эти значения могут быть непосредственно применены для работы без датчиков.
[0037] Как было описано выше, поскольку согласно конфигурации из этого варианта осуществления изобретения становится возможным приложение переменного напряжения всегда к той оси, на которой крутящий момент не генерируется, с использованием оцененного положения θ0 магнитного полюса путем приложения вектора высокочастотного переменного напряжения так, чтобы амплитуда переменного тока совпадала с командой амплитуды переменного тока, то вибрации и шумы вращающейся машины могут быть подавлены.
[0038] ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
В приведенном выше первом варианте осуществления изобретения был описан способ оценки положения магнитного полюса с использованием высокочастотного напряжения без генерации погрешности положения магнитного полюса даже под нагрузкой. Однако, в этом способе подача высокочастотного напряжения в области высоких скоростей является нецелесообразной с точки зрения эффективности работы, коэффициента использования напряжения и максимального тока, как было описано выше.
Во втором варианте осуществления изобретения средство 6 вычисления положения магнитного полюса имеет блок 65 адаптивного наблюдения для оценки положения магнитного полюса во всех областях скоростей от низкой скорости до высокой скорости, и положение магнитного полюса вычисляют с использованием блока 65 адаптивного наблюдения во всех областях скоростей. Среди областей скоростей область низких скоростей является областью, в которой индуктивное напряжение является настолько малым, что трудно вычислить вектор потока. Соответственно, вектор потока вычисляют с использованием высокочастотного переменного напряжения, вследствие чего вводят поправку для оценки положения магнитного полюса в области низких скоростей, в которой блок 65 адаптивного наблюдения является нецелесообразным. Таким образом, становится возможным оценить положение магнитного полюса во всех областях скоростей.
[0039] На Фиг. 11 показана общая конфигурация устройства управления вращающейся машины переменного тока согласно второму варианту осуществления изобретения. В этом варианте осуществления изобретения амплитуду переменного тока, команду амплитуды переменного тока, вектор команды напряжения и вектор тока обнаружения вводят в средство 6 вычисления положения магнитного полюса. Остальная конфигурация является той же самой, что и конфигурация из приведенного выше первого варианта осуществления изобретения, и ее описание здесь опущено. На Фиг. 12 показана конфигурация средства 6 вычисления положения магнитного полюса из этого варианта осуществления изобретения.
[0040] В этом варианте осуществления изобретения средство 6 вычисления положения магнитного полюса имеет узел 66 обнаружения вектора потока, который обнаруживает вектор потока ротора по команде амплитуды переменного тока и амплитуде переменного тока и выводит результат обнаружения в качестве вектора потока обнаружения, узел 63 вычисления вектора отклонения, который выводит вектор отклонения тока, представляющий собой отклонение между оцененным вектором тока и вектором тока обнаружения, и вектор отклонения потока, представляющий собой отклонение между оцененным вектором потока и вектором потока обнаружения, узел 64 усиления отклонения, который усиливает вектор отклонения тока и вектор отклонения потока и выводит результат в качестве усиленного вектора отклонения, и узел 65 адаптивного наблюдения, который выводит оцененный вектор тока, оцененный вектор потока и оцененное положение магнитного полюса вращающейся машины 1 переменного тока.
[0041] Узел 63 вычисления вектора отклонения выводит вектор (eids, eiqs) отклонения тока, полученный путем вычитания вектора (ids, iqs) тока обнаружения, который выведен из средства 2 обнаружения вектора тока, из оцененного вектора (ids0, iqs0) тока, который выведен из описанного ниже узла 65 адаптивного наблюдения, посредством сумматора-вычитателя 631, и выводит вектор (eϕdr, eϕqr) отклонения потока, полученный путем вычитания вектора (ϕdrD, ϕqrD) потока обнаружения, который выведен из описанного ниже узла 66 обнаружения вектора потока, из оцененного вектора (ϕdr0, ϕqr0) потока, который выведен из описанного ниже узла 65 адаптивного наблюдения, посредством сумматора-вычитателя 632.
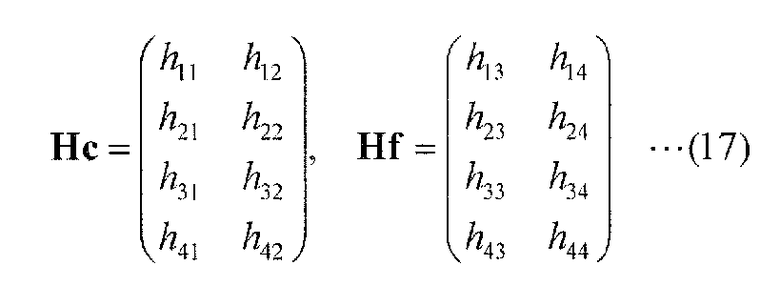
[0042] На Фиг. 13 приведено изображение, на котором показана конфигурация узла 64 усиления отклонения. Матрица 641 усиления из Фиг. 13 выводит результат, полученный путем умножения (eids, eiqs}T, представляющей собой транспонированную матрицу вектора (eids, eiqs) отклонения тока, на матрицу Hc, а матрица 642 усиления выводит результат, полученный путем умножения вектора (eϕdr, eϕqr)T отклонения потока, на матрицу Hf. Матрицы Hc и Hf представляют собой матрицы усиления, заданные приведенным ниже уравнением (17), а h11-h44 в приведенном ниже уравнении (17) представляют собой коэффициенты усиления. Здесь h11-h44 представляют собой значения, которые могут быть установлены произвольно. Например, hll-h42 в матрице Hc установлены так, чтобы значения соответствующих коэффициентов усиления изменялись с оцененной скоростью ωr0, как изложено на Фиг. 9 в патентной литературе 3 (PTL 3) (в Патенте Японии № 4672236). Аналогичным образом, значения hl3-h44 в матрице Hf усиления могут быть установлены так, чтобы значения соответствующих коэффициентов усиления изменялись с оцененной скоростью ωr0. В этом случае, как показано на Фиг, 14, этот узел сконфигурирован так, что оцененную скорость ωr0 также выводят из описанного ниже узла 65 адаптивного наблюдения для введения оцененной скорости ωr0 в матрицы 644 и 645 усиления в узле 64 усиления отклонения.
[0043] [Ур. 17]
Сумматор-вычитатель 643 выводит усиленный вектор (e1, e2, e3, e4)T отклонения путем суммирования выведенных векторов матрицы 641 усиления и матрицы 642 усиления из Фиг. 13 или выведенных векторов матрицы 644 усиления и матрицы 645 усиления из Фиг. 14.
[0044] Что касается оцененной скорости и оцененного положения магнитного полюса, выведенных из описанного ниже узла 65 адаптивного наблюдения, то поскольку скорость и положение могут быть оценены удовлетворительно при высоких скоростях вращения без использования вектора отклонения потока, который представляет собой отклонение между вектором потока обнаружения и оцененным вектором потока в том случае, когда абсолютная величина оцененной скорости является большой, значения hl3 - h44 в матрице 642 усиления или в матрице 645 усиления устанавливают равными нулю, вследствие чего выведенная матрица 642 усиления или матрица 645 усиления становится равной нулю в интервале высоких скоростей вращения. Следовательно, объем вычислений может быть уменьшен путем прекращения вычислений узлом 66 обнаружения вектора потока. К тому же, поскольку vdh и vqh не генерируют ток высокой частоты, то путем установления выходных сигналов vdh и vqh из генератора 33 вектора высокочастотного напряжения внутри средства 3 управления равными нулю могут быть устранены потери, вызванные током высокой частоты.
[0045] Узел 65 адаптивного наблюдения, показанный на Фиг. 15, сформирован из преобразователя 651 координат, блока 652 наблюдения состояния и блока 853 интегрирования.
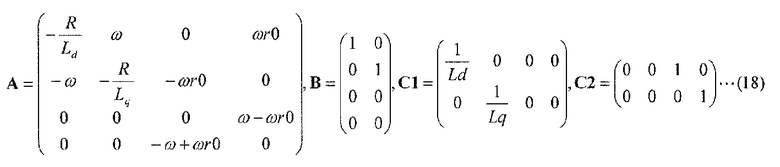
Сначала описано функционирование узла 65 адаптивного наблюдения. Пусть R - сопротивлением якорной обмотки вращающейся машины 1 переменного тока, Ld - индуктивность обмотки якоря в направлении оси d, Lq - индуктивность обмотки якоря в направлении оси q, ωr0 - оцененная скорость, а ω - угловая частота электропитания. В этом случае матрицы A, B, C, D, C1 и C2 заданы уравнением (18) следующим образом.
[Ур. 18]
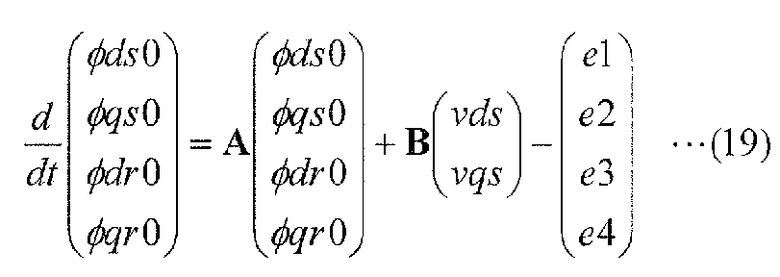
[0046] К тому же, пусть ϕds0 и ϕqs0 являются, соответственно, составляющей по оси d и составляющей по оси q оцененного вектора реакции якоря на оси d-q, а vds и vqs являются, соответственно, составляющей по оси d и составляющей по оси q вектора команды напряжения на оси d-q. В этом случае оцененные вектора ϕds0 и ϕqs0 реакции якоря и оцененные вектора ϕdr0 и ϕqr0 потока могут быть получены в соответствии с уравнением (19) следующим образом.
[Ур. 19]
[0047] К тому же, пусть s - оператором Лапласа (дифференциальный оператор), kp - пропорциональное усиление, а ki - интегральное усиление. В этом случае оцененная скорость ωr0, которая является внутренним параметром матрицы А в приведенном выше уравнении (18), может быть задана приведенным ниже уравнением (20) с использованием векторов Δids и Δiqs отклонения тока и оцененных векторов ϕdr0 и ϕqr0 потока.
[Ур. 20]

[0048] Оцененное положение θ0 может быть получено путем объединения оцененной скорости согласно уравнению (21) следующим образом.
[Ур. 21]

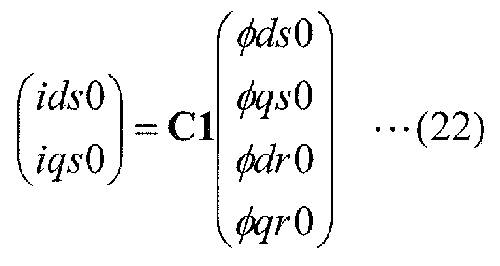
К тому же, оцененные вектора ids0 и iqs0 тока могут быть найдены согласно уравнению (22) следующим образом.
[Ур. 22]
[0049] Аналогичным образом, оцененные вектора φdr0 и φqr0 потока могут быть найдены согласно уравнению (23) следующим образом.
[Ур. 23]
Как было описано выше, оцененное положение, оцененный вектор тока и оцененный вектор потока могут быть вычисленными в соответствии с приведенными выше уравнениями (18)-(23) на основании вектора команды напряжения, вектора отклонения усиления и вектора отклонения тока.
[0050] С учетом вышеизложенного, теперь будет приведено описание Фиг. 15 как изображения, на котором показана конфигурация узла 65 адаптивного наблюдения.
Со ссылкой на Фиг. 15, преобразователь 651 координат осуществляет преобразование вектора команды трехфазного переменного напряжения, который выведен из средства управления, в вектора vds и vqs команды напряжения на оси d-q, которая является ортогональной координатой вращения, и выводит результат в блок 652 наблюдения состояния.
[0051] Блок 652 наблюдения состояния, подробности которого показаны на Фиг. 16, выводит результат, полученный путем умножения вектора (vds, vqs)T команды напряжения, который выведен из преобразователя 651 координат, на матрицу B посредством блока 6521 вычисления матрицы усиления. Сумматор-вычитатель 6522 выводит вектор как результат суммирования или вычитания выходного сигнала блока 6521 вычисления матрицы усиления, выходного сигнала блока 6523 вычисления матрицы усиления и вектора (e1, e2, e3, e4)T усиления отклонения. Блок 6524 интегрирования поэлементно интегрирует вектор, выведенный из сумматора-вычитателя 6522 и выводит результат в качестве вектора (ϕds0, ϕqs0, ϕdr0, ϕqr0)T. Изложенное выше описание является частью, соответствующей правой части приведенного выше уравнения (19). Левая часть приведенного выше уравнения (19) соответствует входной части блока 6524 интегрирования.
[0052] Блок 6525 вычисления матрицы усиления выводит оцененный вектор (ϕds0, ϕqs0)T тока путем умножения вектора (ϕds0, ϕqs0, ϕdr0, ϕqr0)T на матрицу C1. Эта часть соответствует приведенному выше уравнению (22). Блок 6526 вычисления матрицы усиления выводит оцененный вектор (ϕdr0, ϕqr0)T потока путем умножения вектора (ϕds0, ϕqs0, ϕdr0, ϕqr0)T на матрицу C2. Эта часть соответствует приведенному выше уравнению (23).
Блок 653 интегрирования из Фиг. 15 находит оцененное положение θ0 путем интегрирования оцененной скорости ωr0, выведенной из блока 652 наблюдения состояния, которая выражается приведенным выше уравнением (21).
Выше было описано функционирование узла 65 адаптивного наблюдения.
[0053] Как было описано выше, узел 66 обнаружения вектора потока вычисляет вектор потока обнаружения из амплитуды переменного тока и команды амплитуды переменного тока, и сначала описан вектор потока обнаружения.
Как показано на Фиг. 17, вектор ϕr потока ротора ориентирован в том же самом направлении, что и ось dm. Здесь вектор ϕr потока ротора спроецирован на ϕdrD в направлении, параллельном вектору высокочастотного напряжения, то есть, в направлении оси d, и на ϕqrD в направлении, ортогональном вектору высокочастотного напряжения, то есть, в направлении оси q. Учитывая то, что ϕdrD и ϕqrD спроецированы, соответственно, на ось d и на ось q, они являются векторами потока обнаружения. В этом случае вектора потока обнаружения могут быть записаны в виде математической формулы, выраженной уравнением (24), следующим образом.
[0054] [Ур. 24]
При этом, ϕf в приведенном выше уравнении (24) является величиной вектора ϕr потока ротора и может быть измерена заранее. Следовательно, для вычисления вектора потока обнаружения в соответствии с приведенным выше уравнением (24) достаточно найти Δθ.
[0055] В приведенном выше первом варианте осуществления изобретения отклонение Δθ между осью dm в качестве направления потока ротора и осью d в качестве оцененного положения магнитного полюса выражается приведенным выше уравнением (9). Поскольку узел 65 адаптивного наблюдения функционирует так, что Δθ неуклонно приближается к нулю, получают, что 2Δθ≈0 и, следовательно, что sin2Δθ≈2Δθ. Соответственно, приведенное ниже уравнение (25) может быть получено из приведенного выше уравнения (9).
[Ур. 25]
Следовательно, вектор потока обнаружения может быть вычислен согласно приведенным выше уравнениям (24) и (25) с использованием |iqh|.
[0056] Теперь будет рассмотрено функционирование под нагрузкой. Выше было описано, что распределение индуктивности под нагрузкой изменяется в зависимости от тока нагрузки, и генерируется погрешность между осью d, указанной оцененным положением магнитного полюса, и осью dm в направлении потока ротора, вследствие чего приведенное выше уравнение (8) изменяется на приведенное выше уравнение (13). Здесь уравнение (13) преобразуется в уравнение (26) следующим образом.
[Ур. 26]

Предполагая, что функционирование осуществляется так, что Δθ неуклонно приближается к нулю, получают, что 2Δθ≈0. Следовательно, при условии, что sin2Δθ≈2Δθ и cos2Δθ≈1, из приведенного выше уравнения (26) может быть получено приведенное ниже уравнение (27).
[0057] [Ур. 27]

Здесь второй член в правой части приведенного выше уравнения (27) равен приведенному выше уравнению (15). Следовательно, приведенное ниже уравнение (28) получено путем вычитания приведенного выше уравнения (27) из приведенного выше уравнения (15).
[Ур. 28]

[0058] Приведенное ниже уравнение (29) относительно Δθ может быть получено из приведенного выше уравнения (28).
[Ур. 29]

Поскольку в уравнении (29) остается неизвестная величина cos2θe, то это уравнение не может быть применено для приведенного выше уравнения (24) без изменений.
Соответственно, cos2θe вычисляют с использованием параллельной составляющей idh тока высокой частоты. Параллельная составляющая idh тока высокой частоты выражается приведенным ниже уравнением (30) из приведенного выше уравнения (12) и величины (амплитуды) |idh|, выраженной приведенным ниже уравнением (31).
[0059] [Ур. 30]

[Ур. 31]

Предполагая, что функционирование осуществляют так, что Δθ неуклонно приближается к нулю, из условия Δθ≈0 получают приведенное ниже уравнение (32).
[0060] [Ур. 32]

Правая часть приведенного выше уравнения (32) является известной за исключением cos2θe, и |idh| может быть вычислено из высокочастотной составляющей вектора тока обнаружения, как и |iqh|. То есть, cos2θe может быть вычислен в оперативном режиме согласно уравнению (33) следующим образом.
[0061] [Ур. 33]
Следовательно, вектор потока обнаружения, выраженный приведенным выше уравнением (24), может быть вычислен путем вычисления Δθ в соответствии с приведенными выше уравнениями (29) и (33).
[0062] В этом случае, как показано на Фиг. 18, средство 5 вычисления амплитуды переменного тока выводит матрицу (|idh|, |iqh|) амплитуды переменного тока из вектора тока высокой частоты посредством блока 53 извлечения переменной амплитуды. Как показано на Фиг. 19, блок 53 извлечения переменной амплитуды имеет селектор 533 параллельной составляющей в дополнение к селектору 531 ортогональной составляющей и блоку 532 вычисления амплитуды. Селектор 533 параллельной составляющей выбирает idh путем умножения вектора тока высокой частоты на (1, 0)T. Блок 532 вычисления амплитуды вычисляет амплитуду |idh| согласно приведенному ниже уравнению (34).
[Ур. 34]
[0063] Вследствие вышеупомянутой конфигурации отклонение Δθ между осью dm в качестве направления потока ротора и осью d в качестве оцененного положения магнитного полюса может быть вычислено по амплитуде тока высокой частоты и команде амплитуды тока высокой частоты. Следовательно, вектор потока обнаружения может быть вычислен без необходимости предварительного нахождения положения магнитного полюса, и, следовательно, может быть уменьшен объем вычислений.
К тому же, даже при работе под нагрузкой, при которой появляется погрешность оцененного положения магнитного полюса, путем нахождения вектора потока обнаружения из амплитуды переменного тока и команды амплитуды переменного тока путем нахождения вектора отклонения потока, который представляет собой отклонение между вектором потока обнаружения и оцененным вектором потока, и нахождения вектора отклонения тока, который представляет собой отклонение между вектором тока обнаружения и оцененным вектором тока, так, чтобы положение магнитного полюса было оценено узлом 65 адаптивного наблюдения по усиленному вектору отклонения, полученному путем усиления вектора отклонения потока, положение магнитного полюса может быть оценено во всех областях скоростей без влияний погрешности, вызванной нагрузкой, при оценке положения магнитного полюса.
[0064] ТРЕТИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
В вышеупомянутом первом варианте осуществления изобретения средство 7 генерации команды амплитуды переменного тока генерирует команду амплитуды переменного тока из команды вектора тока. Средство 3 управления осуществляет управление вектором тока обнаружения вращающейся машины 1 переменного тока, так, чтобы он постоянно совпадал с командой вектора тока. Следовательно, из вектора тока обнаружения может быть сгенерирована команда амплитуды переменного тока.
На Фиг. 20 показана конфигурация устройства управления вращающейся машины переменного тока из этого варианта осуществления изобретения. Со ссылкой на Фиг. 20, средство 7 генерации команды амплитуды переменного тока генерирует команду амплитуды переменного тока из вектора тока обнаружения. Остальная конфигурация является той же самой, что и конфигурация из приведенного выше первого варианта осуществления изобретения.
[0065] Средство 7 генерации команды амплитуды переменного тока генерирует команду амплитуды переменного тока путем умножения вектора (ids, iqs) тока обнаружения на значение (Kd, Kq)T усиления. Значением (Kd, Kq) усиления может являться простое постоянное значение или табличное значение согласно команде вектора тока, причем в этом случае значение команды амплитуды переменного тока может являться более точным. К тому же, путем задания Kd=0 команда переменного тока может быть сгенерирована только лишь из составляющей крутящего момента вектора тока обнаружения.
[0066] Как было описано выше, средство 7 генерации команды амплитуды переменного тока может вычислять положение магнитного полюса с использованием команды амплитуды переменного тока, совпадающей с внутренним состоянием вращающейся машины переменного тока, путем генерации команды амплитуды переменного тока с использованием вектора тока обнаружения.
Следует понимать, что средство 7 генерации команды амплитуды переменного тока, описанное в третьем варианте осуществления изобретения, также применимо и в приведенном выше втором варианте осуществления изобретения. В этом случае конфигурация является такой, как показано на Фиг. 21, и средство 7 генерации команды амплитуды переменного тока сформировано таким же самым образом, как и в третьем варианте осуществления изобретения.
[0067] ЧЕТВЕРТЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Устройства управления вращающейся машины переменного тока согласно вариантам осуществления изобретения с первого по третий, прикладывают высокочастотное напряжение в направлении оси dm, которое является потоком ротора вращающейся машины переменного тока. Однако, во вращающейся машине переменного тока, в которой отношение Ld и Lq (именуемое ниже коэффициентом явнополюсности) является большим, ось, которая подавляет возникновение крутящего момента за счет высокочастотного напряжения, не ограничена осью dm.
В этом варианте осуществления изобретения описано устройство управления вращающейся машины переменного тока, выполненное с возможностью приложения высокочастотного напряжения в направлении, в котором подавлено возникновение крутящего момента вследствие высокочастотного переменного напряжения, даже для вращающейся машины переменного тока, имеющей большой коэффициент явнополюсности.
[0068] Сначала приведено описание причины возникновения крутящего момента вследствие высокочастотного переменного напряжения и способа подавления возникновения крутящего момента.
В том случае, когда вращающейся машиной 1 переменного тока является синхронная машина с использованием постоянных магнитов, сгенерированный крутящий момент τ, как известно, выражается следующим уравнением (35).
[Ур. 35]

где Pm - количество пар полюсов вращающейся машины 1 переменного тока, id - ток в направлении оси dm, а iq - ток в направлении оси qm.
[0069] Путем модифицирования приведенного выше уравнения (35) в приведенное ниже уравнение (36) и задания постоянного значения крутящего момента τ iq может быть выражено как гиперболическая линия id. Годограф (кривая постоянного крутящего момента) вектора тока на оси (id, iq) в этом случае является таким, как показано на Фиг. 22.
[Ур. 36]
Упомянутая здесь кривая постоянного крутящего момента означает, что крутящий момент является постоянным при любом значении тока на кривой, и крутящий момент не изменяется даже тогда, когда вектор тока перемещается по кривой. Другими словами, когда вектор тока, колеблющийся под действием высокочастотного переменного напряжения, находится на этой кривой, высокочастотное переменное напряжение не генерирует крутящий момент.
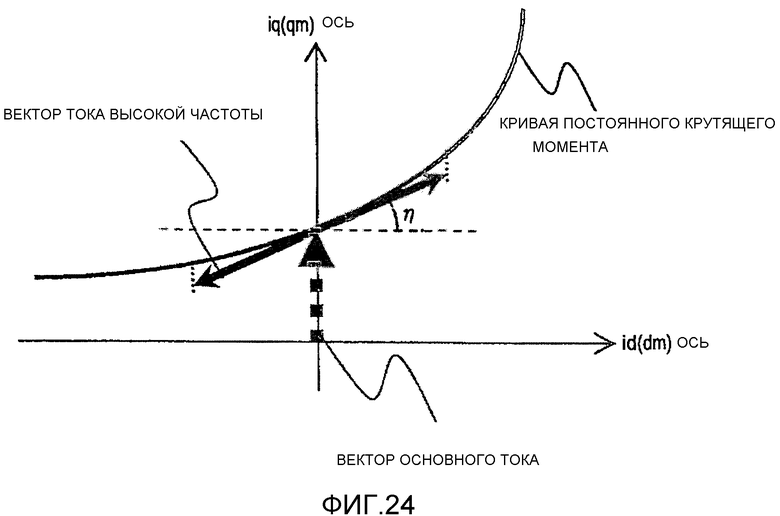
[0070] Предположим, что приложен вектор основного тока для приведения в действие вращающейся машины 1 переменного тока, и сгенерирован крутящий момент. В этом случае существует кривая постоянного крутящего момента для этого крутящего момента. В этом случае, когда высокочастотное переменное напряжение приложено в направлении оси dm, годографом вектора тока высокой частоты является вектор тока высокой частоты, показанный на Фиг. 23. Поскольку годограф этого вектора не находится на кривой постоянного крутящего момента, то крутящий момент изменяется. Соответственно, возможно, что во вращающейся машине могут быть сгенерированы вибрации и шумы.
Чтобы преодолеть это неудобство, путем аппроксимации годографа вектора тока высокой частоты касательной линией к кривой постоянного крутящего момента, как показано на Фиг. 24, изменение крутящего момента вследствие вектора тока высокой частоты может быть подавлено. Путем дифференцирования приведенного выше уравнения (36) по id получают наклон касательной линии согласно приведенному ниже уравнению (37). Кроме того, наклон может быть выражен приведенным ниже уравнением (38) путем модифицирования приведенного ниже уравнения (37) с использованием приведенного выше уравнения (35).
[0071] [Ур. 37]
[Ур. 38]
[0072] К тому же, пусть η представляет собой отклонение между осью dm и касательной линией к кривой постоянного крутящего момента, в этом случае отклонение η в заданном векторе (id1, iq1) основного тока выражается следующим уравнением (39).
[Ур. 39]
Другими словами, путем приложения высокочастотного напряжения к оси, смещенной на η от оси dm, становится возможным подавить возникновение крутящего момента вследствие вектора тока высокой частоты.
Выше была описана причина возникновения крутящего момента вследствие высокочастотного напряжения и способ подавления возникновения крутящего момента.
[0073] В приведенных выше вариантах осуществления изобретения с первого по третий команду (vdh, vqh) вектора высокочастотного напряжения просто изменяют для приложения высокочастотного напряжения к оси η, отстоящей от оси dm. В более конкретном изложении, это приложение может быть достигнуто путем предоставления команды вектора высокочастотного напряжения, выраженного следующим уравнением (40).
[Ур. 40]
[0074] Теперь будет приведено описание способа задания |iqh_ref| в этом случае.
Когда команда вектора высокочастотного напряжения приложена к оси dc, отстоящей на η от оси dm, Δθ в приведенном выше уравнении (13) может быть заменено (η+Δθ1) с использованием мгновенного отклонения Δθ1 от оси dc, и амплитуда тока высокой частоты на оси qm выражается следующим уравнением (41).
[Ур. 41]

[0075] Поскольку мгновенная погрешность Δθ1 сходится к нулю, то в конечном счете может быть получено приведенное ниже уравнение (42).
[Ур. 42]
Следовательно, приведенное выше уравнение (42) является таким же самым, что и приведенное выше уравнение (14), за исключением того, что к правому синусоидальному члену просто добавлено (2η), а остальная конфигурация является той же самой, что и конфигурация из приведенных выше вариантов осуществления изобретения с первого по третий. Соответственно, к приведенным выше вариантам осуществления изобретения с первого по третий применим даже тот случай, когда направление приложения команды вектора высокочастотного напряжения изменяется относительно оси dm, путем нахождения |iqh_ref| посредством электромагнитного анализа или предварительного измерения с использованием реальной машины. Вследствие вышеописанной конфигурации высокочастотное напряжение может быть приложено в направлении, в котором подавляется возникновение крутящего момента.
[0076] Как было описано выше, даже во вращающейся машине переменного тока с большим коэффициентом явнополюсности путем задания оси приложения высокочастотного напряжения в направлении касательной к кривой постоянного крутящего момента, могут быть подавлены вибрации и шумы вращающейся машины вследствие колебаний крутящего момента, вызванных высокочастотным напряжением.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
[0077] 1: вращающаяся машина переменного тока,
2: средство обнаружения вектора тока,
3: средство управления,
4: средство приложения напряжения,
5: средство вычисления амплитуды переменного тока,
6: средство вычисления положения магнитного полюса,
7: средство генерации команды амплитуды переменного тока,
21, 35 и 651: преобразователь координат,
31, 34, 512, 61, 643, 6522: сумматор-вычитатель,
32: контроллер тока,
33: генератор вектора высокочастотного напряжения,
51: фильтр,
52: блок извлечения ортогональной составляющей,
511: узкополосный режекторный фильтр,
521 и 531: селектор ортогональной составляющей,
522, 532 и 534: блок вычисления амплитуды,
533: селектор параллельной составляющей,
62: блок оценки положения магнитного полюса,
63: блок вычисления вектора отклонения,
64: блок усиления отклонения,
65: узел адаптивного наблюдения,
66: узел обнаружения вектора потока,
641, 642, 644 и 645: матрица усиления
652: блок наблюдения состояния,
653: блок интегрирования,
6521 и 6523-6526: блок вычисления матрицы усиления,
6527: блок оценки скорости

Изобретение относится к области электротехники и может быть использовано во асинхронной и синхронной электрической машине без использования датчика положения. Технический результат - уменьшение вибраций и шумов. Устройство управления вращающейся машины переменного тока содержит средство управления для приема команды вектора тока и вектора тока обнаружения в качестве входных данных и для вывода команды вектора напряжения во вращающуюся машину переменного тока, средство вычисления амплитуды переменного тока по меньшей мере одной из параллельной составляющей и ортогональной составляющей относительно команды вектора напряжения, средство генерации команды амплитуды переменного тока из команды вектора тока и средство вычисления положения магнитного полюса для вычисления оцененного положения магнитного полюса вращающейся машины переменного тока так, чтобы амплитуда переменного тока совпадала с командой амплитуды переменного тока. 7 з.п. ф-лы, 24 ил.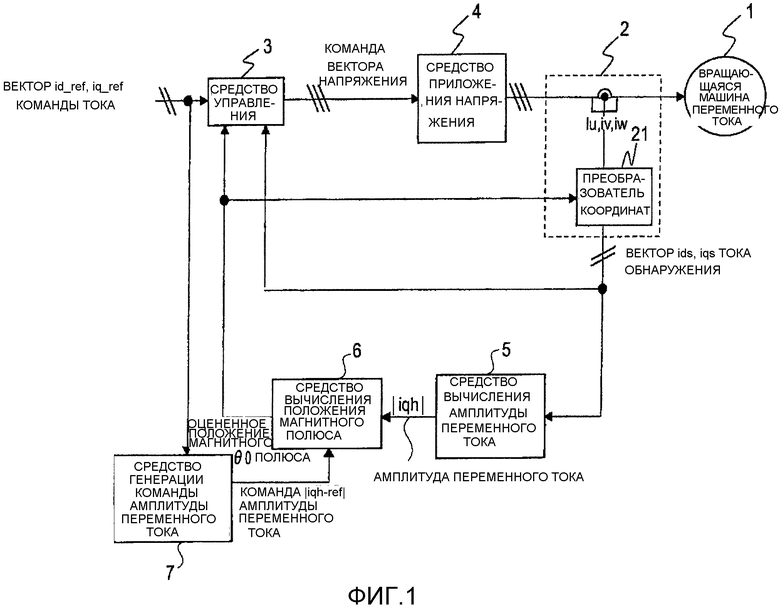
1. Устройство управления вращающейся машины переменного тока, содержащее:
средство обнаружения вектора тока для обнаружения вектора тока вращающейся машины переменного тока;
средство управления для приема команды вектора тока и вектора тока обнаружения в качестве входных данных и для вывода команды вектора напряжения, полученной путем суммирования команды вектора основного напряжения для приведения в действие вращающейся машины переменного тока и команды вектора переменного напряжения, являющегося переменным относительно произвольной оси;
средство приложения напряжения для приложения напряжения к вращающейся машине переменного тока согласно команде вектора напряжения;
средство вычисления амплитуды переменного тока для приема вектора тока, обнаруженного средством обнаружения вектора тока, в качестве входных данных и для вычисления амплитуды переменного тока по меньшей мере одной из параллельной составляющей и ортогональной составляющей, относительно команды вектора переменного напряжения;
средство генерации команды амплитуды переменного тока для генерации команды амплитуды переменного тока из команды вектора тока или вектора тока обнаружения; и
средство вычисления положения магнитного полюса для вычисления оцененного положения магнитного полюса вращающейся машины переменного тока, причем устройство управления отличается тем, что средство вычисления положения магнитного полюса вычисляет оцененное положение магнитного полюса так, что амплитуда переменного тока совпадает с командой амплитуды переменного тока.
2. Устройство управления вращающейся машины переменного тока по п. 1, отличающееся тем, что средство управления сформировано из:
сумматора-вычитателя, который вычитает вектор тока обнаружения из команды вектора тока;
контроллера тока, который генерирует команду вектора основного напряжения, осуществляя управление так, чтобы выходной сигнал из сумматора-вычитателя не имел отклонения между командой вектора тока и вектором тока обнаружения;
генератора вектора переменного напряжения, который генерирует команду вектора переменного напряжения на оси d-q; и
сумматора-вычитателя, который генерирует команду вектора напряжения путем суммирования команды вектора основного напряжения и команды вектора переменного напряжения.
3. Устройство управления вращающейся машины переменного тока по п. 1, отличающееся тем, что средство вычисления положения магнитного полюса сформировано из:
сумматора-вычитателя, который выводит отклонение между командой амплитуды переменного тока и амплитудой переменного тока; и
блока оценки положения магнитного полюса, который выводит оцененное положение магнитного полюса из отклонения.
4. Устройство управления вращающейся машины переменного тока
по п. 1, отличающееся тем, что в средство вычисления положения магнитного полюса вводят амплитуду переменного тока, команду амплитуды переменного тока, команду вектора напряжения и вектор тока обнаружения.
5. Устройство управления вращающейся машины переменного тока по п. 1, отличающееся тем, что:
средство вычисления положения магнитного полюса имеет
узел обнаружения вектора потока, который вычисляет вектор потока обнаружения из амплитуды переменного тока и команды амплитуды переменного тока,
узел адаптивного наблюдения, который выводит оцененный вектор тока, оцененный вектор потока и оцененное положение магнитного полюса вращающейся машины переменного тока, узел вычисления вектора отклонения, который выводит вектор отклонения тока, который представляет собой отклонение между оцененным вектором тока и вектором тока обнаружения, и вектор отклонения потока, который представляет собой отклонение между оцененным вектором потока и вектором потока обнаружения, и
узел усиления отклонения, который усиливает вектор отклонения тока и вектор отклонения потока и выводит результат в качестве усиленного вектора отклонения в узел адаптивного наблюдения; и
при этом оцененное положение магнитного полюса, выведенное из узла адаптивного наблюдения, вычислено на основании оцененного вектора тока, оцененного вектора потока, усиленного вектора отклонения и команды вектора напряжения.
6. Устройство управления вращающейся машины переменного тока
по п. 1 или 2, отличающееся тем, что средство генерации команды амплитуды переменного тока вычисляет команду амплитуды переменного тока из составляющей крутящего момента вектора тока обнаружения или команды вектора тока.
7. Устройство управления вращающейся машины переменного тока по п. 1, отличающееся тем, что команда вектора переменного напряжения изменяется относительно оси, на которой во время приложения напряжения крутящий момент не генерируется.
8. Устройство управления вращающейся машины переменного тока по п. 7, отличающееся тем, что когда сгенерирован произвольный постоянный крутящий момент, средство управления осуществляет управление так, чтобы команда вектора переменного напряжения была ориентирована в направлении касательной к годографу вектора тока на оси d-q.
| СПОСОБ БЕЗДАТЧИКОВОЙ ОЦЕНКИ УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА МНОГОФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2428784C1 |
| JP 2002291283 A, 04.10.2002 | |||
| US 2007229021 A1, 04.10.2007 | |||
| Сканирующее устройство для бумагоделательных машин | 1986 |
|
SU1401093A1 |
| WO 2010076669 A1, 08.07.2010 | |||
| CN 102075105 A, 25.05.2011. | |||

