ОБЛАСТЬ ТЕХНИКИ
Область техники раскрытия относится к управлению регулятором давления наддува в турбонагнетателе.
УРОВЕНЬ ТЕХНИКИ И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Некоторые двигатели внутреннего сгорания используют компрессионное устройство, такое как турбонагнетатель, для повышения удельной выходной мощности/крутящего момента двигателя. В одном из примеров, турбонагнетатель может включать в себя компрессор и турбину, соединенные приводным валом, где турбина присоединена к стороне выпускного коллектора двигателя, а компрессор присоединен к стороне впускного коллектора двигателя. Таким образом, приводимая в действие выхлопными газами турбина подает энергию на компрессор, чтобы повышать давление (например, наддув или давление наддува) во впускном коллекторе и усиливать поток воздуха в двигатель. Наддувом можно управлять посредством регулирования количества газа, попадающего в турбину, например, с помощью регулятора давления наддува. Привод может быть функционально присоединен через рычажный механизм к клапану регулятора давления наддува и приводиться в действие, чтобы позиционировать клапан регулятора давления наддува где-нибудь между полностью открытым положением и полностью закрытым положением (например, на седле клапана), чтобы добиваться требуемого наддува, основанного на условиях эксплуатации. Привод может быть электрическим приводом, например, таким как электродвигатель.
Турбонагнетатель главным образом может подвергаться воздействию высоких окружающих температур, например, вследствие ближайшего потока горячих отработавших газов. По существу, относительно длинный рычажный механизм может применяться для присоединения клапана регулятора давления наддува к связанному с ним приводу и уменьшения близости привода к высоким температурам, чтобы, тем самым, защищать привод от потенциального ухудшения характеристик, происходящего от таких высоких температур. Рычажные механизмы этого типа, однако, могут демонстрировать шум, вибрацию и неплавность движения (NVH), такие как дребезг, во время определенных условий - например, в течение промежутков времени, в которых рычажный механизм остается относительно неподвижным, или когда ассоциативно связанный двигатель работает на холостом ходу. В более общем смысле, эти проблемы могут возникать в устройствах управления, которые применяют сервомеханизмы для управления относительно длинными рычажными механизмами.
В некоторых подходах к уменьшению NVH в приводе регулятора давления наддува, клапан регулятора давления наддува принудительно закрывается во время определенных условий эксплуатации (например, во время холостого хода двигателя). В других подходах, пружина смещения и/или другие механические компоненты (например, гасители колебаний) присоединены к узлу регулятора давления наддува в местоположении, где может поглощаться вибрация.
Изобретатели в материалах настоящей заявки осознали несколько проблем у подходов, идентифицированных выше. Несмотря на то, что NVH может быть уменьшена для подходов, в которых клапан регулятора давления наддува принудительно закрывается во время определенных условий эксплуатации, выбросы и экономия топлива, демонстрируемые двигателем, применяющим такое управление, могут находиться под неблагоприятным влиянием противодавления, сформированного закрыванием клапана. В противоположность, добавление пружины смещения может повышать нагрузку, прикладываемую к приводу регулятора давления наддува, которая может уменьшать качество управления наддувом и повышать риск ухудшения характеристик привода вследствие высоких температур привода, вызванных повышенными уровнями тока, отбираемыми для преодоления повышенной нагрузки. Кроме того, добавление других механических компонентов привносит дополнительные затраты и потенциальные места повреждения, особенно в местоположениях, где присутствует избыточное тепло.
Таким образом, предусмотрены способы работы регулятора давления наддува.
В одном из примеров, способ регулирования системы оснащенного рычажным механизмом привода клапана содержит содержащий этап, на котором прикладывают, в дополнение к регулировкам управления положением с обратной связью, негармоническое колебание к приводу системы оснащенного рычажным механизмом привода клапана.
В более конкретном примере, негармоническое колебание применяется для подмножества подъемов клапана регулятора давления наддува, ближайших к, но не соответствующих, седлу клапана системы оснащенного рычажным механизмом привода клапана.
В еще одном аспекте примера, негармоническое колебание является несинусоидальным.
В еще одном другом аспекте примера, негармоническое колебание является периодическим и имеет частоту наложения, определяемую на основании частоты дребезга.
В кроме того еще одном аспекте примера, частота дребезга представляет собой период между последовательными моментами времени, в которые клапан регулятора давления наддува системы оснащенного рычажным механизмом привода клапана устанавливает контакт с седлом клапана системы оснащенного рычажным механизмом привода клапана.
В еще одном аспекте, контакт с седлом клапана выявляют посредством контроля выходного сигнала с датчика положения привода.
В еще одном аспекте, негармоническое колебание является негармоническим по отношению к частоте дребезга.
В кроме того дополнительном еще одном аспекте примера, частоту наложения дополнительно определяют на основании постоянной, умноженной на частоту дребезга, причем постоянная является приближенным соотношением чисел Фибоначчи.
В частном варианте реализации изобретения, отношение является приблизительно одним из 2/3 и 3/2.
В другом аспекте колебание является формой сигнала, наложенной на регулировки управления положением с обратной связью.
Объектом изобретения является также способ работы регулятора давления наддува, содержащий этап, на котором накладывают на сигналы управления, отправляемые на привод регулятора давления наддува, несинусоидальную форму сигнала в ответ на условия шума, вибрации и неплавности движения в регуляторе давления наддува.
В частном варианте реализации вышеуказанного способа несинусоидальную форму сигнала накладывают на сигналы управления для подъемов клапана регулятора давления наддува, ближайших к, но не соответствующих, седлу клапана системы оснащенного рычажным механизмом привода клапана.
В другом частном аспекте условия включают в себя частоту дребезга, соответствующую периоду между последовательными моментами времени, в которые клапан регулятора давления наддува контактирует с седлом клапана, и
при этом, несинусоидальная форма сигнала является периодической, форма сигнала имеет частоту наложения, определяемую на основании частоты дребезга.
В еще одном аспекте, частота наложения является произведением соотношения чисел Фибоначчи и частоты дребезга.
В еще одном аспекте, частота наложения является негармонической по отношению к частоте дребезга.
В другом аспекте, сигналы управления определяют на основании требуемого наддува и условий эксплуатации двигателя.
Объектом изобретения является также способ регулирования системы оснащенного рычажным механизмом привода клапана регулятора давления наддува турбонагнетателя, содержащий этапы, на которых:
применяют регулировки управления положением с обратной связью к регулятору давления наддува через систему привода для позиционирования регулятора давления наддува в требуемом положении регулятора давления наддува, определяемым в зависимости от условий эксплуатации двигателя; и
добавляют регулировку негармонического колебания к регулятору давления наддува через систему привода, негармоническое колебание является повторяющимся негармоническим колебанием, применяемым только для подмножества подъемов клапана регулятора давления наддува, ближайших к, но не соответствующих, седлу клапана системы оснащенного рычажным механизмом привода клапана.
В частном варианте реализации вышеназванный способ дополнительно содержит этап, на котором указывают ухудшение характеристик привода в ответ на выявление дребезга наряду с применением регулировок негармонического колебания.
В другом частном варианте негармоническое колебание является несинусоидальным, и при этом, негармоническое колебание является периодическим и имеет частоту наложения, определяемую на основании частоты дребезга.
В еще одном частном аспекте контакт с седлом клапана, порождающий выявленный дребезг, определяют посредством того, что контролируют выходной сигнал с датчика положения привода.
В примерах, описанных выше, NVH в узле регулятора давления наддува может понижаться, не вынуждая клапан регулятора давления наддува закрываться и не оказывая неблагоприятного влияния на выбросы и экономию топлива. Более того, повышенные себестоимость, нагрузка привода, компоновочное пространство и потенциальное ухудшение характеристик, ассоциативно связанные с дополнительными добавочными, могут устраняться. В противоположность добавлению механических деталей, процедура управления регулятора давления наддува транспортного средства может быть легко дополнена подходами, описанными в материалах настоящей заявки в любой момент времени существования транспортного средства, например, посредством обновления команд, удерживаемых в контроллере двигателя. Таким образом, технический результат достигается этими действиями.
Вышеприведенные преимущества и другие преимущества и признаки настоящего описания будут без труда очевидны из последующего Подробного описания, когда воспринимается в одиночку или в связи с прилагаемыми чертежами.
Должно быть понятно, что сущность изобретения, приведенная выше, предоставлена для знакомства с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Она не предполагается для идентификации ключевых или существенных признаков заявленного предмета изобретения, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный предмет изобретения не ограничен реализациями, которые кладут конец каким-нибудь недостаткам, отмеченным выше или в любой части этого раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
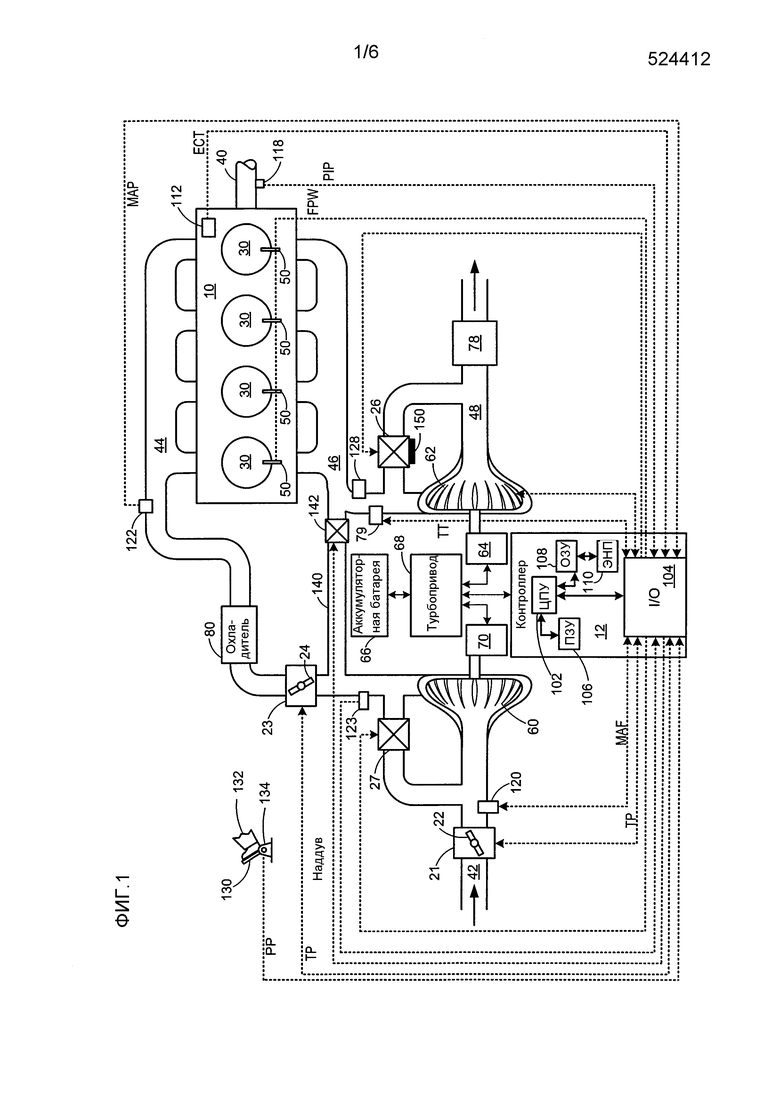
Фиг. 1 показывает структурную схему двигателя с турбонаддувом, включающего в себя регулятор давления наддува.
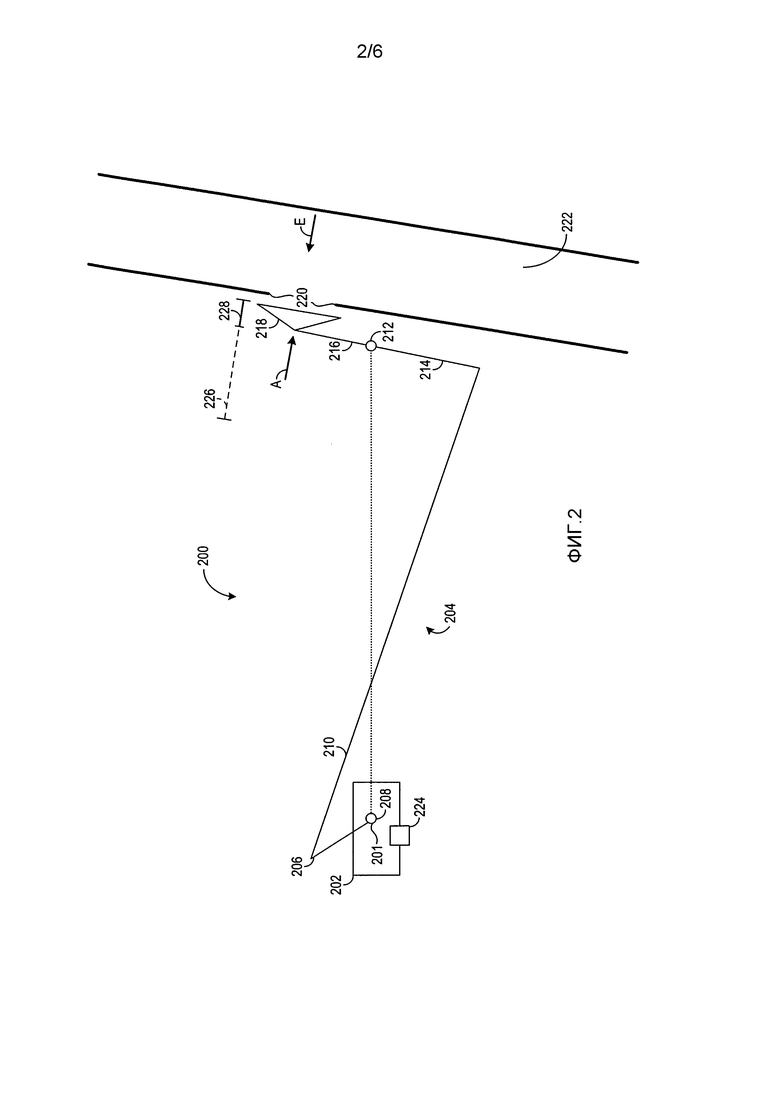
Фиг. 2 показывает примерное устройство регулятора давления наддува по фиг. 1.
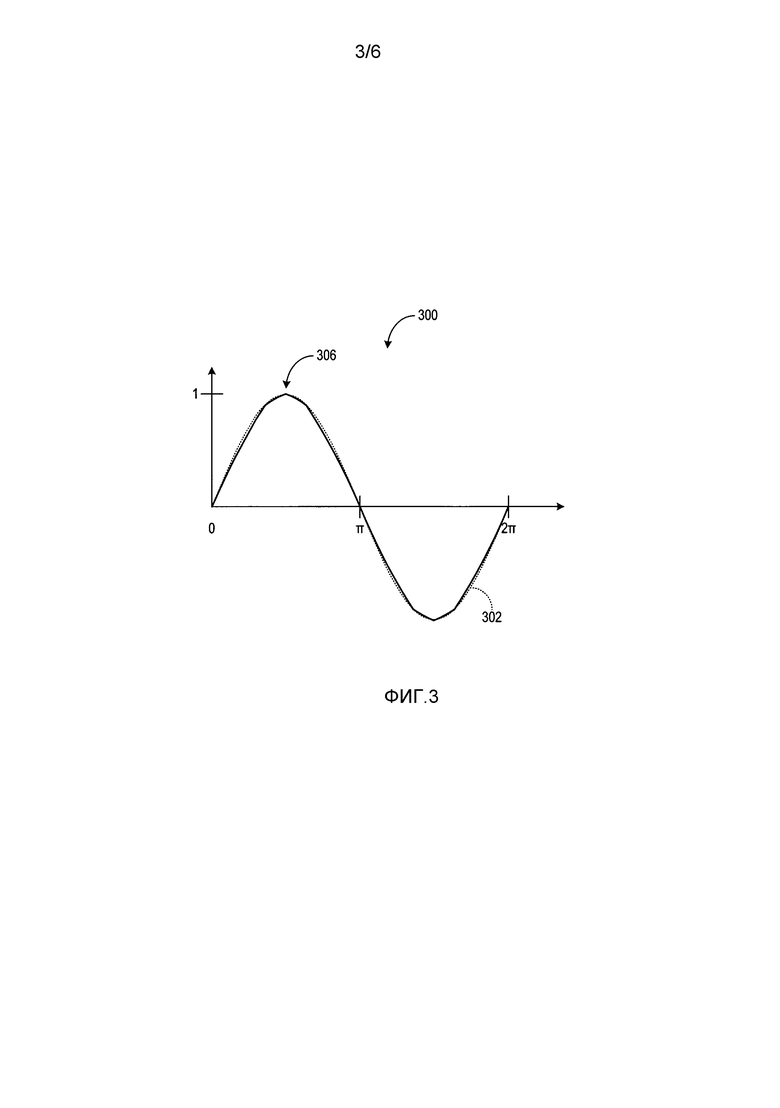
Фиг. 3 показывает примерную форму сигнала, которая может накладываться на сигналы управления, отправляемые на привод регулятора давления наддува устройства регулятора давления наддува по фиг. 2.
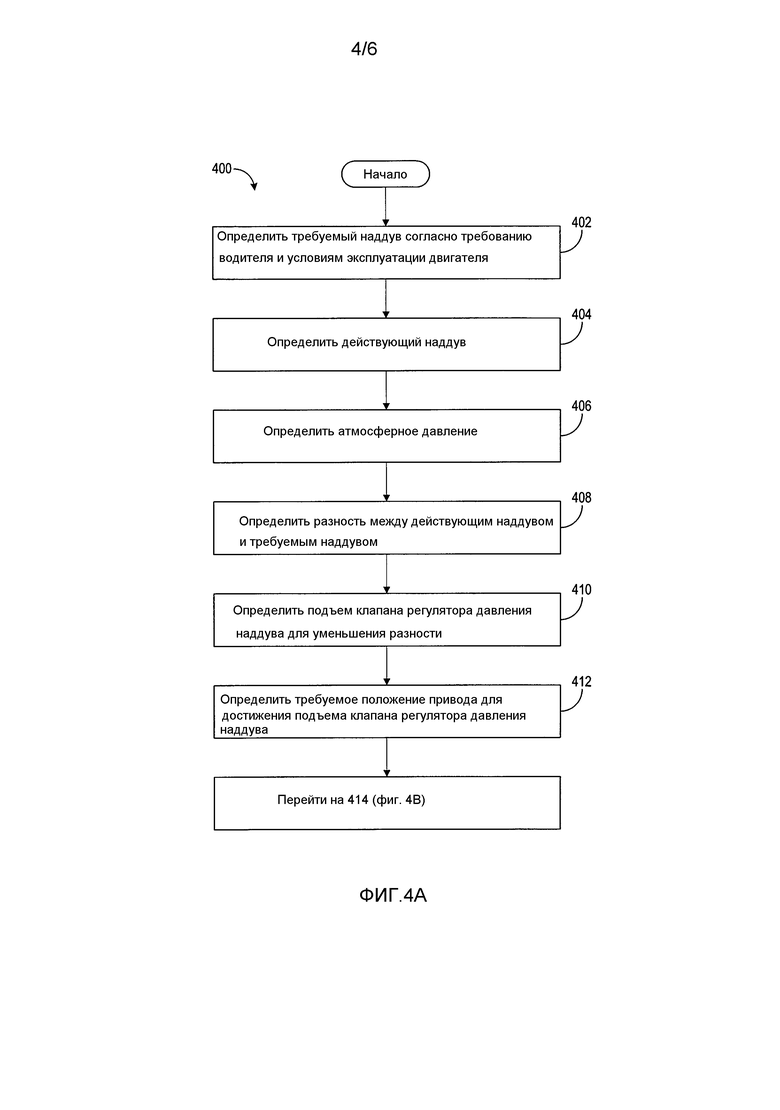
Фиг. 4A-B показывают блок-схему последовательности операций способа, иллюстрирующую способ работы регулятора давления наддува.
Фиг. 5 показывает примерную карту, иллюстрирующую подъем клапана регулятора давления наддува для примерного ездового цикла.
ПОДРОБНОЕ ОПИСАНИЕ
Сервомеханизмы, которые применяют сложные или длинные рычажные механизмы для позиционирования элемента, такого как клапан, часто предрасположены к дребезгу, когда элемент остается относительно неподвижным, но ближайшие механические компоненты подвергаются движению. Одним из таких сервомеханизмов может быть привод регулятора давления наддува, которые применяет относительно длинный рычажный механизм, присоединяющих выходной вал привода к клапану регулятора давления наддува, чтобы позиционировать клапан для управления величиной наддува, выдаваемой в двигатель внутреннего сгорания. В течение промежутков времени, в которых двигатель работает на холостом ходу, и клапан регулятора давления наддува не позиционируется повторно, рычажный механизм может дребезжать. В некоторых подходах, клапан регулятора давления наддува помещается в полностью закрытом положении у седла клапана, чтобы избегать дребезга. Это, однако, может формировать противодавление, которое может оказывать неблагоприятное влияние на выбросы и экономию топлива. В других подходах, пружина смещения добавлена в систему привода регулятора давления наддува для предотвращения дребезга. Это добавление, однако, повышает нагрузку на привод регулятора давления наддува. Другие механические компоненты (например, гасители колебаний) могут быть добавлены для уменьшения дребезга, но привносят проблемы долговечности и совместимости, обусловленные их близостью к высоким окружающим температурам.
Таким образом, предусмотрены различные способы работы регулятора давления наддува. Фиг. 1 показывает структурную схему двигателя с турбонаддувом, включающего в себя регулятор давления наддува, фиг. 2 показывает примерное устройство регулятора давления наддува по фиг. 1, фиг. 3 показывает примерную форму сигнала, которая может накладываться на сигналы управления, отправляемые на привод регулятора давления наддува устройства регулятора давления наддува по фиг. 2, фиг. 4A-B показывают блок-схему последовательности операций способа, иллюстрирующую способ работы регулятора давления наддува, и фиг. 5 показывает примерную карту, иллюстрирующую подъем клапана регулятора давления наддува для примерного ездового цикла. Двигатель по фиг. 1 также включает в себя контроллер, выполненный с возможностью выполнять способ, изображенный на фиг. 4A-B.
Фиг. 1 - принципиальная схема, показывающая примерный двигатель 10, который может быть включен в силовую установку автомобиля. Двигатель 10 показан с четырьмя цилиндрами 30. Однако, другие количества цилиндров могут использоваться в соответствии с данным раскрытием. Двигатель 10 может управляться, по меньшей мере частично, системой управления, включающей в себя контроллер 12, и входными сигналами от водителя 132 транспортного средства через устройство 130 ввода. В этом примере, устройство 130 ввода включает в себя педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала PP положения педали. Каждая камера 30 сгорания (например, цилиндр) двигателя 10 может включать в себя стенки камеры сгорания с поршнем (не показан), расположенными в них. Поршни могут быть присоединены к коленчатому валу 40, так чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 40 может быть присоединен к по меньшей мере одному ведущему колесу транспортного средства через промежуточную систему трансмиссии (не показана). Кроме того, стартерный электродвигатель может быть присоединен к коленчатому валу 40 через маховик, чтобы давать возможность операции запуска двигателя 10.
Камеры 30 сгорания могут принимать всасываемый воздух из впускного коллектора 44 через впускной канал 42 и могут выпускать отработавшие газы через выпускной канал 48. Впускной коллектор 44 и выпускной коллектор 46 могут избирательно сообщаться с камерой 30 сгорания через соответственные впускные клапаны и выпускные клапаны (не показаны). В некоторых вариантах осуществления, камера 30 сгорания может включать в себя два или более впускных клапанов и/или два или более выпускных клапанов.
Топливные форсунки 50 показаны присоединенными непосредственно к камере 30 сгорания для впрыска топлива непосредственно в нее пропорционально длительности импульса сигнала FPW, принятого из контроллера 12. Таким образом, топливная форсунка 50 обеспечивает то, что известно в качестве непосредственного впрыска топлива в камеру 30 сгорания. Топливная форсунка, например, может быть установлена сбоку камеры сгорания или сверху камеры сгорания. Топливо может подаваться в топливную форсунку 50 топливной системой (не показана), включающей в себя топливный бак, топливный насос и направляющую-распределитель для топлива. В некоторых вариантах осуществления, камеры 30 сгорания, в качестве альтернативы или дополнительно, могут включать в себя топливную форсунку, скомпонованную во впускном коллекторе 44, в конфигурации, которая предусматривает то, что известно как оконный впрыск топлива во впускное окно выше по потоку от каждой камеры 30 сгорания.
Впускной канал 42 может включать в себя дроссель 21 и 23, имеющий дроссельные заслонки 22 и 24, соответственно. В этом конкретном примере, положение дроссельных заслонок 22 и 24 может изменяться контроллером 12 посредством сигналов, выдаваемых на привод, включенный в состав дросселями 21 и 23. В одном из примеров, приводы могут быть электроприводами (например, электродвигателями), конфигурацией, которая обычно указывается ссылкой как электронное управление дросселем (ETC). Таким образом, заслонки 21 и 23 могут приводиться в действие для варьирования всасываемого воздуха, подаваемого в камеру 30 сгорания, между другими цилиндрами двигателя. Положение дроссельных заслонок 22 и 24 может выдаваться в контроллер 12 сигналом TP положения дросселя. Впускной канал 42 дополнительно может включать в себя датчик 120 массового расхода воздуха, датчик 122 давления воздуха в коллекторе и датчик 123 давления на входе дросселя для выдачи соответственных сигналов MAF (массового расхода воздуха), MAP (давления воздуха в коллекторе) в контроллер 12.
Выпускной канал 48 может принимать отработавшие газы из цилиндров 30. Датчик 128 отработавших газов показан присоединенным к выпускному каналу 48 выше по потоку от турбины 62 и устройства 78 снижения токсичности выбросов. Датчик 128 может быть выбран из числа различных пригодных датчиков для выдачи показания топливо/воздушного соотношения в отработавших газах, например, таких как линейный кислородный датчик или UEGO (универсальный или широкодиапазонный датчик кислорода в отработавших газах), двухрежимный кислородный датчик или EGO, датчик NOx, HC, или CO. Устройство 78 снижения токсичности выбросов может быть трехкомпонентным каталитическим нейтрализатором (TWC), уловителем NOx, различными другими устройствами снижения токсичности выбросов или их комбинациями.
Температура отработавших газов может измеряться одним или более датчиков температуры (не показаны), расположенных в выпускном канале 48. В качестве альтернативы, температура отработавших газов может логически выводиться на основании условий эксплуатации двигателя, таких как число оборотов, нагрузка, отношение количества воздуха к количеству топлива (AFR), запаздывание искрового зажигания, и т.д.
Контроллер 12 показан на фиг. 1 в качестве микрокомпьютера, включающего в себя микропроцессорный блок 102, порты 104 ввода/вывода, электронный запоминающий носитель для исполняемых программ и калибровочных значений, показанный в качестве микросхемы 106 постоянного запоминающего устройства в этом конкретном примере, оперативное запоминающее устройство 108, дежурную память 110 и шину данных. Контроллер 12 может принимать различные сигналы с датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе, измерение вводимого массового расхода воздуха (MAF) с датчика 120 массового расхода воздуха; температуру охлаждающей жидкости двигателя (ECT) с датчика 112 температуры, схематически показанного в одном месте в пределах двигателя 10; сигнал профильного считывания зажигания (PIP) с датчика 118 на эффекте Холла (или другого типа), присоединенного к коленчатому валу 40; положение дросселя (TP) с датчика положения дросселя, как обсуждено; и сигнал абсолютного давления в коллекторе, MAP, с датчика 122, как обсуждено. Сигнал числа оборотов двигателя, RPM, может формироваться контроллером 12 из сигнала PIP. Сигнал давления в коллекторе, MAP, с датчика давления в коллекторе может использоваться для выдачи указания разряжения или давления во впускном коллекторе 44. Отметим, что могут использоваться различные комбинации вышеприведенных датчиков, такие как датчик MAF без датчика MAP, или наоборот. Во время стехиометрической работы, датчик MAP может давать показание крутящего момента двигателя. Кроме того, этот датчик, наряду с выявленным числом оборотов двигателя, может давать оценку заряда (включающего в себя воздух), введенного в цилиндр. В одном из примеров, датчик 118, который также используется в качестве датчика числа оборотов двигателя, может вырабатывать предопределенное количество равноразнесенных импульсов каждый оборот коленчатого вала 40. В некоторых примерах, постоянное запоминающее устройство 106 запоминающего носителя может быть запрограммировано машинно-читаемыми данными, представляющими команды, исполняемые процессором 102 для выполнения способов, описанных ниже, а также вариантов, которые предвосхищены, но специально не перечислены.
Двигатель 10 дополнительно может включать в себя компрессионное устройство, такое как турбонагнетатель или нагнетатель, включающий в себя по меньшей мере компрессор 60, скомпонованный вдоль впускного коллектора 44. Что касается турбонагнетателя, компрессор 60 может по меньшей мере частично приводиться в действие турбиной 62, например, через вал или другое соединительное устройство. Турбина 62 может быть скомпонована вдоль выпускного канала 48 и сообщаться с отработавшими газами, текущими через него. Различные устройства могут быть предусмотрены для осуществления привода компрессора. Что касается нагнетателя, компрессор 60 может по меньшей мере частично приводиться в движение двигателем и/или электрической машиной и может не включать в себя турбину. Таким образом, величина сжатия, обеспечиваемого для одного или более цилиндров двигателя с помощью турбонагнетателя или нагнетателя, может изменяться контроллером 12. В некоторых случаях, турбина 62, например, может приводить в движение электрогенератор 64 для выдачи энергии в аккумуляторную батарею 66 через приводной механизм 68 турбонагнетателя. Энергия из аккумуляторной батареи 66 затем может использоваться для приведения в движение компрессора 60 с помощью электродвигателя 70. Кроме того, датчик 123 может быть размещен во впускном коллекторе 44 для выдачи сигнала BOOST (НАДДУВ) в контроллер 12.
Кроме того, выпускной канал 48 может включать в себя регулятор 26 давления наддува для отвода отработавших газов от турбины 62. В некоторых вариантах осуществления, регулятор 26 давления наддува может быть многоступенчатым регулятором давления наддува, таким как двухступенчатый регулятор давления наддува с первой ступенью, выполненной с возможностью управления давлением наддува, и второй ступенью, выполненной с возможностью увеличивать тепловой поток в устройство 78 снижения токсичности выбросов. Регулятор 26 давления наддува может приводиться в действие приводом 150, который, например, может быть электрическим приводом, таким как электродвигатель, хотя пневматические приводы также предполагаются. Впускной канал 42 может включать в себя перепускной клапан 27 компрессора, выполненный с возможностью отводить всасываемый воздух вокруг компрессора 60. Регулятор 26 давления наддува и/или перепускной клапан 27 компрессора могут управляться контроллером 12 через исполнительные механизмы (например, привод 150), например, чтобы открываться, когда требуется более низкое давление наддува.
Впускной канал 42 может дополнительно включать в себя охладитель 80 наддувочного воздуха (CAC) (например, промежуточный охладитель) для понижения температуры нагнетаемых турбонагнетателем или нагнетателем всасываемых газов. В некоторых вариантах осуществления, охладитель 80 наддувочного воздуха может быть воздушно-воздушным теплообменником. В других вариантах осуществления охладитель 80 наддувочного воздуха может быть воздушно-жидкостным теплообменником.
Кроме того, в раскрытых вариантах осуществления, система рециркуляции отработавших газов (EGR) может направлять требуемую порцию отработавших газов из выпускного канала 48 во впускной канал 42 через канал 140 EGR. Величина EGR, выдаваемой во впускной канал 42, может изменяться контроллером 12 посредством клапана 142 EGR. Кроме того, датчик EGR (не показан) может быть скомпонован внутри канала EGR и может выдавать показание одного или более из давления, температуры, концентрации отработавших газов. В качестве альтернативы, EGR может управляться посредством расчетного значения, основанного на сигналах с датчика MAF (выше по потоку), MAP (впускного коллектора), MAT (температуры газа в коллекторе) и датчика частоты вращения коленчатого вала. Кроме того, EGR может управляться на основании датчика O2 отработавших газов и/или кислородного датчика на впуске (впускного коллектора). В некоторых условиях, система EGR может использоваться для регулирования температуры смеси воздуха и топлива в пределах камеры сгорания. Фиг. 1 показывает систему EGR высокого давления, где EGR направляется из выше по потоку от турбины турбонагнетателя в ниже по потоку от компрессора турбонагнетателя. В других вариантах осуществления, двигатель, дополнительно или в качестве альтернативы, может включать в себя систему EGR низкого давления, где EGR направляется из ниже по потоку от турбины турбонагнетателя в выше по потоку от компрессора турбонагнетателя.
Далее, с обращением к фиг. 2, показано примерное устройство 200 регулятора давления наддува. Регулятор 200 давления наддува, например, может быть регулятором 26 давления наддува по фиг. 1. Регулятор 200 давления наддува приводится в действие приводом 202, который может быть приводом 150 на фиг. 1. В этом примере, привод 202 является электрическим приводом, таким как электродвигатель. В некоторых примерах, привод 202, в частности, может быть поворотным приводом, имеющим элемент, который подвергается вращению, чтобы, тем самым, изменять положение привода. Выходной вал 201 привода 202 присоединен к рычажному механизму 204 и, в частности, первому звену 206 рычажного механизма. Как показано, рычажный механизм 204 в проиллюстрированном варианте осуществления является четырехзвенным, хотя возможны другие рычажные механизмы, такие как линейная тяга. Рычажный механизм 204 движется вокруг двух шарниров, в том числе, первого шарнира 208, вокруг которого вращаются первое звено 206 и второе звено 210, и второго шарнира 212, вокруг которого вращаются третье звено 214 и четвертое звено 216. Первое, второе, третье и четвертое звенья 206, 210, 214 и 216 обычно присоединены друг к другу для формирования рычажного механизма 204 в качестве непрерывной детали. На конце, противоположном приводу 202, рычажный механизм 204 присоединен, на четвертом звене 216, к клапану 218 регулятора давления наддува, который может быть расположен в полностью открытом положении, полностью закрытом положении или где-нибудь между ними, относительно седла 220 клапана. Седло 220 клапана показано в качестве являющегося расположенного в участке выпускного канала 222, который, например, может быть выпускным каналом 48 двигателя 10 на фиг. 1. Посредством позиционирования клапана 218 регулятора давления наддува этим непрерывно изменяемым образом, можно управлять количеством отработавших газов, достигающих турбины (например, турбины 62 по фиг. 1) турбонагнетателя. Таким образом, давлением наддува, подаваемым в двигатель, такой как двигатель 10 по фиг. 1, можно управлять согласно требуемому наддуву и другим условиям эксплуатации. Положением клапана 218 регулятора давления наддува у регулятора 200 давления наддува, в частности, можно управлять посредством приведения в действие привода 202 и размещения его выходного вала 201, перемещения которого могут передаваться на клапан для отработавших газов через рычажный механизм 204.
Как показано, регулятор 200 давления наддува дополнительно включает в себя датчик 224 положения, который может быть выполнен с возможностью измерять изменения угла выходного вала 201, чтобы, тем самым, оценивать расположение клапана 218 регулятора давления наддува. В некоторых примерах, может применяться измерительный преобразователь вращательного движения, выполненный с возможностью считывать угол поворота вращающегося компонента в приводе 202, причем, импульсы, сформированные из него, отправляются в контроллер 12 на фиг. 1. Датчик 224 положения, однако, может быть приспособлен для вариантов осуществления, в которых рычажный механизм с линейной тягой используется вместо четырехзвенной конфигурации, показанной на фиг. 2. В любом случае, измерение датчиком 224 положения может использоваться для определения положения клапана 218 регулятора давления наддува, в особенности, расстояния от верхней поверхности седла 220 клапана до нижней поверхности клапана 218 регулятора давления наддува. В других вариантах осуществления, однако, положение клапана 218 регулятора давления наддува может определяться на основании программной модели с использованием одного или более сигналов (например, Наддув), описанных выше со ссылкой на фиг. 1, и отправляться в контроллер 12.
Будет принято во внимание, что регулятор 200 давления наддува и различные его компоненты могут быть модифицированы, не выходя из объема этого раскрытия. Например, датчик тока и/или датчик усилия могут быть включены в состав приводом 202 вместо или в дополнение к датчику 224 положения. Считыванию тока может оказываться содействие с помощью датчика или зонда, или, в других примерах, может рассчитываться на основании закона Ома (или другой зависимости) в качестве отношения напряжения на приводе (например, напряжения на клеммах) и сопротивления (например, сопротивления обмотки) привода, если эти две величины известны или могут быть измерены или логически выведены. Кроме того, как описан выше, другие типы рычажных механизмов могут быть предусмотрены для соединения привода 202 с клапаном 218 регулятора давления наддува, в том числе, но не в качестве ограничения, линейная тяга. Более того, смещающий элемент (не показан) может быть присоединен к клапану 218 регулятора давления наддува, чтобы располагать клапан в положении по умолчанию, когда клапан не приводится в действие приводом 202.
Во время определенных условий эксплуатации, устройство 200 регулятора давления наддува может вызывать NVH. В частности, рычажный механизм 204 может вызывать дребезг, когда привод 202 не является регулирующим положение клапана 218 регулятора давления наддува, и связанный с ним двигатель (например, двигатель 10 по фиг. 1) работает на холостом ходу. Этот дребезг, например, может быть результатом механического колебания имеющих относительных люфт компонентов рычажного механизма 204. Другие факторы могут вносить вклад в дребезг. Например, события двухуровневого нелинейного контакта, при которых клапан 218 регулятора давления наддува осуществляет контакт со своим концевым упором (седлом 220 клапана), могут порождать дребезг. Для подавления дребезга, вырабатываемого рычажным механизмом 204, и/или других типов NVH, создаваемых устройством 200 регулятора давления наддува, форма сигнала может накладываться на сигнал управления, отправляемый на привод 202 регулятора давления наддува. Сигнал управления может быть одним из множества сигналов управления, регулярно отправляемых на привод 202 регулятора давления наддува для позиционирования клапана 218 регулятора давления наддува в положениях, которые обеспечивают требуемый уровень наддува. По существу, сигналы управления могут включать в себя регулировки управления положением с обратной связью. Частота накладываемой формы сигнала могут вычисляться на основании «частоты дребезга» - то есть, частоты, на которой дребезг вырабатывается устройством 200 регулятора давления наддува. Частота дребезга может быть определена в качестве периодов между событиями контакта (например, длительности между последовательными моментами времени, в которые клапан 218 регулятора давления наддува осуществляет контакт с седлом 220 клапана). По существу, события контакта могут выявляться в некоторых примерах посредством контроля выходного сигнала из датчика 224 положения или, в других примерах, посредством контроля требуемого наддува. В частности, частота накладываемой формы сигнала (в материалах настоящей заявки указываемая ссылкой как «частота наложения») может вычисляться в качестве постоянной, умноженной на частоту дребезга. Постоянная может быть приближенным инверсным или неинверсным отношением числе Фибоначчи - например, 2/3 или 3/2. В этом примере, частота наложения, таким образом, может быть негармонической по отношению к частоте дребезга, но относительно близкой к частоте дребезга (например, в пределах 50 Гц). В некоторых вариантах осуществления, сигналы управления, отправляемые на привод 202 регулятора давления наддува, могут модифицироваться формой сигнала наложения для определенного диапазона подъемов клапана 218 регулятора давления наддува и не модифицироваться формой сигнала для подъемов вне диапазона. Фиг. 2 иллюстрирует примерный диапазон 226 подъемов клапана, которые могут допускаться клапаном 218 регулятора давления наддува, в том числе, полностью закрытое и открытое положения, а также подмножество 228 диапазона. Форма сигнала наложения может накладываться на сигналы управления приводом регулятора давления наддува, например, для подъемов клапана, попадающих в пределы подмножества 228. В целом, подмножество 228 включает в себя подъемы клапана, ближайшие к, но не соответствующие седлу 220 клапана. В качестве неограничивающего примера, подмножество 228 включает в себя подъемы, находящиеся в диапазоне от 70% минимального подъема (где минимальный подъем соответствует полностью закрытому положению) до 90% минимального подъема. Однако, будет принято во внимание, что диапазон 226 и подмножество 228 предусмотрены в качестве примеров и не подразумеваются ограничивающими никоим образом.
Как и с ее частотой, профиль формы сигнала наложения может выбираться, чтобы доводить до максимума подавление дребезга. Фиг. 3 показывает пример формы 300 сигнала, которая может накладываться на сигналы управления, отправляемые на привод регулятора давления наддува устройства регулятора давления наддува, для уменьшения дребезга, вырабатываемого устройством регулятора давления наддува. Форма 300 сигнала, в частности, может накладываться на сигналы управления, например, отправляемые на привод 202 регулятора давления наддува по фиг. 2. Так как форма 300 сигнала может пониматься в качестве результата нескольких модификаций в отношении типичной синусоидальной функции, фиг. 3 также показывает синусоидальную функцию 302 пунктирными линиями для справки. Более точно, форма 300 сигнала может считаться периодической, повторяющейся несинусоидальной функцией - то есть, не в точности синусоидальной (например, не соответствующей синусоидальной функции 302 в точности) - демонстрирующей относительно более линейные возрастания и убывания от нижнего до верхнего значений, и от верхнего до нижнего значений, соответственно. Например, форма 300 сигнала демонстрирует относительно более линейное возрастание для входных сигналов между 0 и π/2, чем возрастание синусоидальной функции 302, в этом диапазоне входных сигналов. В некоторых примерах, один или более участков формы 300 сигнала могут быть в точности линейными (например, один или более из участков для входных сигналов, находящихся в диапазоне от 0 д π/2, от π/2 до π, от π до 3π/2, и от 3π/2 до 2π). Форма 300 сигнала также может демонстрировать поведение, отличающееся от поведения синусоидальной функции 302, в областях, ближайших к ее положительным и отрицательным пикам (например, 1 и -1, соответственно, соответствующим входным сигналам π/2 и 3π/2). Например, как указан под 306, форма 300 сигнала демонстрирует меняющуюся скорость изменения с высокой степенью линейности в областях, центрированных по ее пикам (например, 1 и -1). Для данного пика, такая область может начинаться на 90% (например, 0,9) пика на его левой стороне и заканчиваться, как только вновь достигнуто 90% пика на правой стороне пика. Область может демонстрировать положительную скорость изменения от левого значения 90% пика до пика и отрицательную скорость изменения от пика до правого значения 90% пика. По существу, форма 300 сигнала может проявлять отчетливые изменения своей скорости при достижении или падении ниже значения 90% пика и при прохождении пика. Три таких места изменения скорости изменения формы 300 сигнала очевидны в области, указанной на 306. Будет принято во внимание, что форма 300 сигнала приведена в качестве примера, и не подразумевается ограничивающей никоим образом. В частности, частота формы 300 сигнала была выбрана, чтобы облегчать ее сравнение с синусоидальной функцией 302, и возможно будет отличаться от показанной на фиг. 3 по ее определению на основании частоты дребезга.
Посредством накладывания формы сигнала наложения на сигналы управления, отправляемые на привод регулятора давления наддува таким образом, дребезг, вырабатываемый контактом клапана-седла в узле регулятора давления наддува, может подавляться. Другие типы NVH также могут ослабляться, так как применение формы сигнала наложения может поддерживать рычажный механизм регулятора давления наддува (например, рычажный механизм 204 по фиг. 2) в динамическом напряжении и искажать резонансные частоты различных компонентов рычажного механизма, которые, иначе, могут резонировать при подвергании механическому колебанию, так как масса привода регулятора давления наддува (например, привода 202 по фиг. 2) может использоваться для поддержания устойчивой нагрузки на имеющих люфт элементах в рычажном механизме. Несмотря на то, что накладывание формы сигнала наложения может менять положение регулятора давления наддува (например, клапана 218 по фиг. 2) от положения, которое он может иначе предполагать без формы сигнала, степень этого изменения может быть достаточно мала, так что уровни наддува, выдаваемые в двигатель, не подвергаются неблагоприятному влиянию (например, отклонения от требуемых уровней наддува поддерживаются ниже приемлемого порогового значения). Кроме того, определение формы сигнала наложения может учитывать другие факторы - например, силы, требуемые для уравновешивания потока отработавших газов, NVH, создаваемые компонентами вне узла регулятора давления наддува, такими как двигатель, частота зажигания двигателя, условия эксплуатации, для которых дребезг рычажного механизма увеличивается или уменьшается, и т.д.
Далее, с обращением к фиг. 4A-B, показана блок-схема последовательности операций способа, иллюстрирующая способ 400 работы регулятора давления наддува. Способ 400, например, может применяться для работы регулятора 200 давления наддува по фиг. 2, и может храниться и/или выполняться контроллером 12 двигателя по фиг. 1. В одном из примеров, способ для управления турбонагнетателем с помощью регулятора давления наддува может содержать определение требуемого давления наддува и действующего давления наддува. Регулятор давления наддува можно регулировать согласно разности между требуемым давлением наддува и действующим давлением наддува.
На 402, способ включает в себя определение требуемого наддува согласно требованию водителя и условиям эксплуатации двигателя. Оцениваемые условия могут непосредственно измеряться датчиками, например, такими как датчики 112, 118, 120, 122, 123 и 134, и/или условия могут оцениваться по другим условиям эксплуатации двигателя. Оцениваемые условия могут включать в себя температуру охлаждающей жидкости двигателя, температуру моторного масла, массовый расход воздуха (MAF), давление в коллекторе (MAP), наддув (например, давление наддува с датчика 123), число оборотов двигателя, число оборотов холостого хода, барометрическое давление, требуемый водителем крутящий момент (например, с датчика 134 положения педали), температуру воздуха, скорость транспортного средства, и т.д.
Затем, на 404, определяется действующее давление наддува. Действующий наддув может измеряться непосредственно по датчику, такому как датчик 123. Измерение может отправляться в контроллер 12 с помощью сигнала давления Наддува и сохраняться на машинно-читаемом запоминающем носителе (например, ПЗУ 106, ОЗУ 108 и/или KAM 110 контроллера 12 на фиг. 1). В альтернативном варианте осуществления, действующее давление наддува может оцениваться на основании других рабочих параметров, таких как, например, на основании MAP и RPM.
Затем, на 406, определяется атмосферное давление. Например, атмосферное давление может измеряться по датчику MAP при запуске двигателя и/или оцениваться на основании условий эксплуатации двигателя, в том числе, MAF, MAP, положения дросселя, и т.д. Измерение может отправляться в контроллер двигателя и сохраняться на машинно-читаемом запоминающем носителе. В альтернативном варианте осуществления, атмосферное давление может оцениваться на основании других рабочих параметров.
Затем, на 408, определяется разность между действующим и требуемым наддувом. Например, контроллер двигателя может определять разность. В некоторых примерах, разность может определяться вычитанием требуемого наддува из действующего наддува.
Затем, на 410, подъем клапана регулятора давления наддува определяется, для того чтобы уменьшать разность между действующим и требуемым наддувом, определенную на 408. В некоторых примерах, разность между действующим и требуемым наддувом, в дополнение к текущему подъему клапана регулятора давления наддува, подается на пригодный механизм управления, выполненный с возможностью определять подъем клапана регулятора давления наддува, для того чтобы уменьшать эту разность. Например, подъем клапана регулятора давления наддува может использоваться в качестве входных данных в динамическую модель регулятора давления наддува. В некоторых приводах регулятора давления наддува, подъем клапана регулятора давления наддува может отображаться в относительную длительность включения регулятора давления наддува, где сигнал относительной длительности включения формируется контроллером и отправляется на привод регулятора давления наддува. Отображение в относительную длительность включения регулятора давления наддува может включать в себя использование справочных таблиц или расчет относительной длительности включения регулятора давления наддува. В некоторых других приводах, контроллер регулятора давления наддува определяет относительную длительность включения на основании разности между требуемым и существующим положениями регулятора давления наддува. Сигнал управления регулятора давления наддува (WGC) может включать в себя широтно-импульсную модуляцию посредством относительной длительности включения для регулирования регулятора давления наддува. Подъем клапана регулятора давления наддува, например, может достигаться посредством алгоритмов управления с прямой связью, обратной связью и/или других алгоритмов управления.
Член компенсации может учитывать задержки привода регулятора давления наддува. Дополнительно, член компенсации дополнительно может включать в себя регулировки, основанные на перемещении сдвоенных независимых кулачков, которые могут оказывать влияние на давление наддува. Например, по мере того, как впускной кулачок перемещается некоторым образом, который увеличивал бы давление наддува относительно атмосферного давления, величина члена компенсации может уменьшаться. Подобным образом, по мере того, как впускной кулачок перемещается некоторым образом, который уменьшал бы давление наддува относительно атмосферного давления, величина члена компенсации может увеличиваться.
Затем, на 412, требуемое положение привода определяется для достижения подъема клапана регулятора давления наддува, определенного на 410. Требуемое положение привода может подаваться в качестве входного сигнала на различные пригодные механизмы управления, в том числе, описанные выше. В некоторых вариантах осуществления, требуемая ориентация привода может определяться в качестве альтернативы, такая как угловая ориентация вращающегося компонента в приводе.
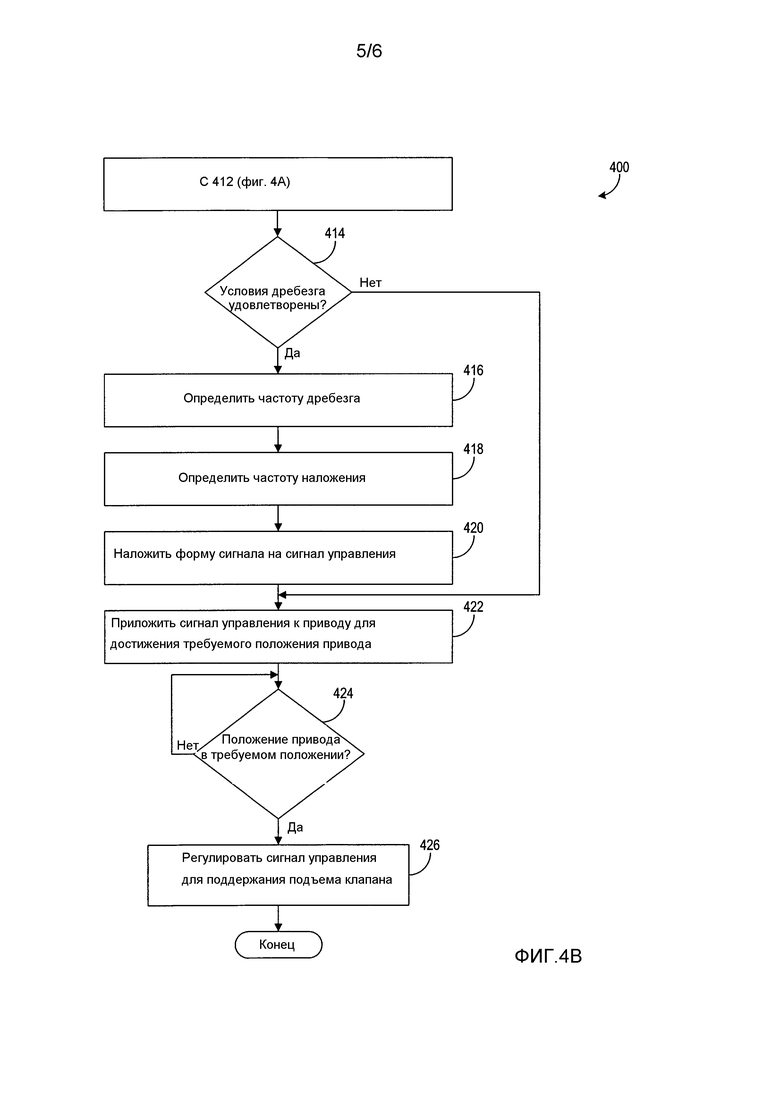
Далее, с обращением к фиг. 4B, способ 400 продолжается на 414, где определяется, удовлетворены ли условия эксплуатации, для которых может подавляться дребезг в рычажном механизме регулятора давления наддува. Условия эксплуатации могут включать в себя диапазон подъемов клапана регулятора давления наддува, для которого может выполняться подавление дребезга. Диапазон может включать в себя подъемы, относительно близкие к, но не соответствующие концевому упору (например, седлу клапана), который может достигаться, когда клапан регулятора давления наддува помещен в полностью закрытое положение - например, подмножество 228 по фиг. 2. Другие условия могут оцениваться на 414. Например, условия, способствующие формированию других типов NVH, внутри или вне узла регулятора давления наддува, могут вызывать наложение формы сигнала, описанное ниже. Другие условия могут включать в себя число оборотов двигателя и измеренная или оцененная температура узла регулятора давления наддува (или его части) в равной степени могут оказывать влияние на формирование дребезга и NVH; в частности, температура узла регулятора давления наддува может учитываться, так как изменение температуры могут менять длину рычажного механизма регулятора давления наддува и, таким образом, близость клапана регулятора давления наддува к его концевому упору. Если определено, что условия дребезга не удовлетворены (Нет), способ переходит на 422. Если определено, что условия дребезга удовлетворены (Да), способ переходит на 416.
На 416, определяется частота дребезга. Как описано выше, частота дребезга может определяться в качестве периода времени, разделяющего последовательные события контакта (моменты времени, в которых клапан регулятора давления наддува контактирует со своим концевым упором). В некоторых примерах, частота дребезга может обновляться по выявлению нового события контакта. События контакта, например, могут выявляться посредством контроля выходного сигнала с датчика положения регулятора давления наддува (например, датчика 224), посредством контроля требуемого наддува или посредством считывания выходного сигнала пригодного датчика (например, пьезоэлектрического датчика, выполненного с возможностью считывать вибрацию в узле регулятора давления наддува).
Затем, на 418, определяется частота наложения формы сигнала, которая должна быть наложена на WGC. Как описано выше, частота наложения может определяться в качестве произведения постоянной и частоты дребезга, определенной на 416, где постоянная может быть приближенным инверсным или неинверсным соотношением чисел Фибоначчи (например, 2/3 или 3/2). В этом примере, частота наложения, таким образом, может быть негармонической по отношению к частоте дребезга, но относительно близкой к частоте дребезга. В некоторых примерах, частота наложения, кроме того, может определяться на основании других условий, оцененных на 414; например, частота наложения может определяться в попытке подавлять дребезг рычажного механизма, обусловленный резонансом компонентов рычажного механизма. По существу, частота наложения может отличаться от известных резонансных частот различных компонентов рычажного механизма, которые порождают NVH.
Затем, на 420, форма сигнала накладывается на WGC. Форма сигнала может быть несинусоидальной функцией, демонстрирующей относительно более линейные скорости изменения, чем типичная синусоидальная функция, такой как форма 300 сигнала по фиг. 3. Форма сигнала предполагает частоту наложения, определенную на 418, так чтобы могли ослабляться NVH в рычажном механизме регулятора давления наддува (и, по выбору, NVH, вырабатываемые другими компонентами).
Затем, на 422, WGC прикладывается к приводу для достижения требуемого положения привода, определенного на 412. Как описано выше, WGC может включать в себя широтно-импульсную модуляцию посредством относительной длительности включения регулятора давления наддува для регулирования регулятора давления наддува. Если условия дребезга были удовлетворены на 414, WGC включает в себя форму сигнала наложения, тогда как, если условия дребезга не были удовлетворены на 414, WGC не включает в себя форму сигнала.
Затем, на 424, определяется, находится ли положение привода в требуемом положении привода. Здесь, считываемое положение привода может сравниваться с требуемым положением привода. В некоторых вариантах осуществления, разности между скорректированным положением привода и требуемым положением привода ниже порогового значения могут игнорироваться. Если положение привода не находится в требуемом положении привода (Нет), способ возвращается на 424. Если положение привода находится в требуемом положении привода (Да), способ переходит на 426.
На 426, сигнал управления, приложенный к приводу, регулируют для поддержания требуемого подъема клапана и управления положением привода. Требуемый подъем клапана может поддерживаться с помощью алгоритмов управления с обратной связью и/или прямой связью. Например, подъемом клапана можно управлять с помощью вспомогательного контура управления. Таким образом, сигнал управления регулируется, когда скорректированное положение привода достигает положения, соответствующего требуемому положению клапана. Будет принято во внимание, что регулирование сигнала управления на 426 может включать в себя применение одной или более форм сигнала наложения описанным выше образом, если условия дребезга, оцененные на 414, удовлетворены на всем протяжении регулирования сигнала управления. В некоторых примерах, одна или более новых форм сигнала могут определяться на всем протяжении регулирования, например, в ответ на изменение частоты дребезга. Вслед за 426, способ заканчивается.
Способ 400 может включать в себя другие этапы, не показанные на фиг. 4A-B. Например, ухудшение характеристик привода регулятора давления наддува может указываться в ответ на выявление дребезга наряду с применением регулировок негармонического колебания с помощью формы сигнала наложения. Указание ухудшения характеристик привода регулятора давления наддува может включать в себя установление диагностических кодов и/или уведомление водителя транспортного средства через индикаторы приборной панели.
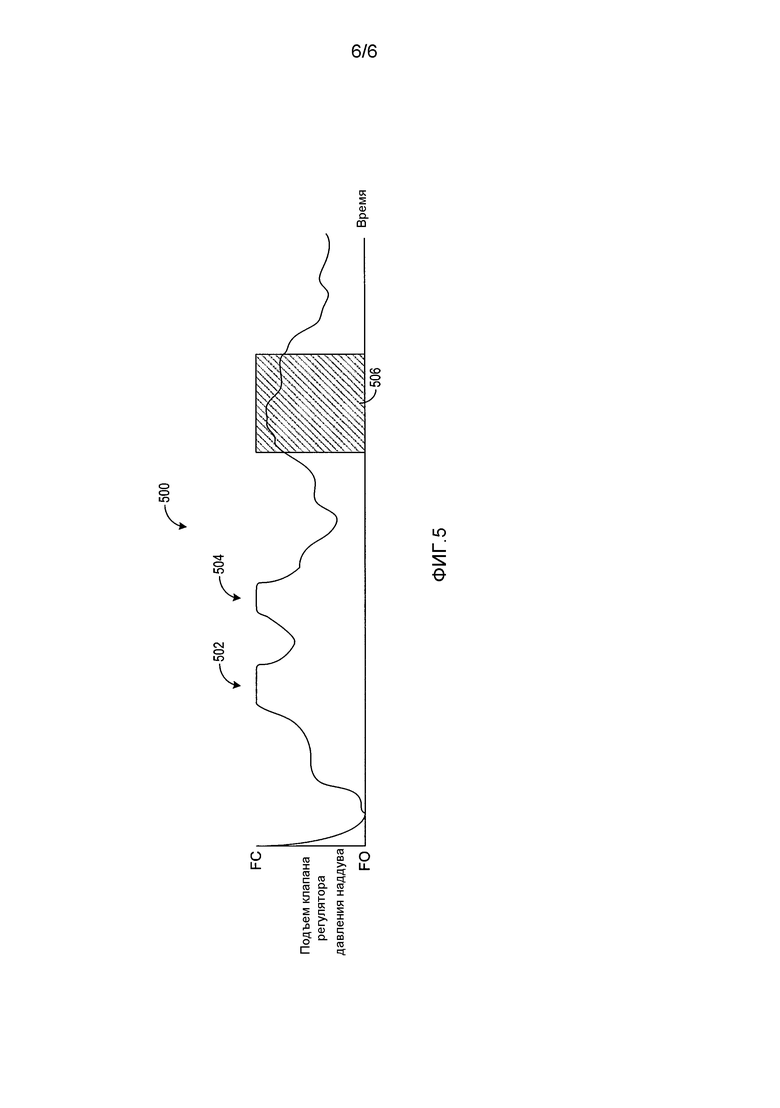
Фиг. 5 показывает примерную карту 500, иллюстрирующую подъем клапана регулятора давления наддува (например, клапана 218 по фиг. 2) для примерного ездового цикла. Подъем клапана регулятора давления наддува охватывает диапазон положений между полностью открытым положением (помеченным «FO» на фиг. 5) и полностью закрытым положением (помеченным «FC» на фиг. 5) и показан в зависимости от времени. В начале ездового цикла, подъем клапана регулятора давления наддува изначально соответствует полностью закрытому положению. По существу, клапан может быть размещен у своего концевого упора. Подъем клапана затем подвергается уменьшению, сопровождаемому увеличением до достижения полностью закрытого положения, указанного под 502, сопровождаемым уменьшением до достижения полностью закрытого положения еще раз, как указано под 504. Соответствия полностью закрытому положению, указанному под 502 и 504, каждое составляет событие контакта. По существу, частота дребезга может определяться на основании этих событий контакта и, впоследствии, частота наложения и форма сигнала наложения, который может накладываться на сигналы управления регулятора давления наддува, если будут удовлетворены условия дребезга, согласно способу 400 по фиг. 4A-B. Вслед за событиями контакта, указанными под 502 и 504, условия дребезга удовлетворены на всем протяжении длительности 506 (указанной на фиг. 5 с помощью штриховки) - более точно, подъем клапана попадает в диапазон подъемов, для которых может выполняться подавление дребезга, возможно, в числе других условий. Соответственно, одна или более форм сигнала наложения накладываются на сигналы управления регулятора давления наддува, отправляемые на всем протяжении длительности 506, чтобы подавлять дребезг (возможно, в дополнение к другим типам NVH). Вслед за длительностью 506, условия дребезга больше не удовлетворены, и сигналы управления регулятора давления наддува, отправляемые вне длительности, больше не подвергаются наложению формы сигнала наложения.
Отметим, что примерные процедуры управления и оценки, включенные в материалы настоящей заявки, могут использоваться с различными конфигурациями систем двигателя и/или транспортного средства. Способы и процедуры управления, раскрытые в материалах настоящей заявки, могут храниться в качестве исполняемых команд в постоянной памяти. Специфичные процедуры, описанные в материалах настоящей заявки, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная, и тому подобная. По существу, проиллюстрированные различные действия, операции и/или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, порядок обработки не обязательно требуется для достижения признаков и преимуществ примерных вариантов осуществления, описанных в материалах настоящей заявки, но приведен для облегчения иллюстрации и описания. Одно или более из проиллюстрированных действий, операций и/или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии. Кроме того, описанные действия, операции и/или функции могут графически представлять управляющую программу, которая должна быть запрограммирована в постоянную память машинно-читаемого запоминающего носителя в системе управления двигателем.
Будет принято во внимание, что конфигурации и способы, раскрытые в материалах настоящей заявки, являются примерными по сути, и что эти специфичные варианты осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные варианты. Например, вышеприведенная технология может быть применена к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому и другим типам двигателя. Предмет настоящего раскрытия включает в себя все новейшие и не очевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, раскрытые в материалах настоящей заявки.
Последующая формула изобретения подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы изобретения могут указывать ссылкой на элемент в единственном числе либо «первый» элемент или его эквивалент. Должно быть понятно, что такие пункты формулы изобретения включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой изобретения посредством изменения настоящей формулы изобретения или представления новой формулы изобретения в этой или родственной заявке. Такая формула изобретения, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле изобретения, также рассматривается в качестве включенной в предмет изобретения настоящего раскрытия.
Изобретение относится к машиностроению, а именно к способам управления регулятором давления наддува в турбонагнетателе. Способ работы регулятора давления наддува двигателя содержит этапы, на которых вычисляют регулирование управления положением с обратной связью на основе разности между существующим положением и требуемым положением привода системы оснащенного рычажным механизмом привода клапана. Прикладывают комбинированный сигнал регулировки управления положением с обратной связью и негармоническое колебание к приводу так, что привод переходит в требуемое положение с уменьшением шума, вибрации и неплавности движения. Негармоническое колебание является повторяющимся негармоническим колебанием, применяемым только для подмножества подъемов клапана регулятора давления наддува, ближайших к, но не соответствующих, седлу клапана системы оснащенного рычажным механизмом привода клапана. Также раскрыты варианты способа работы регулятора давления наддува двигателя. Технический результат заключается в снижении шума, вибрации и неплавности движения в угле регулятора давления наддува. 3 н. и 15 з.п. ф-лы, 6 ил.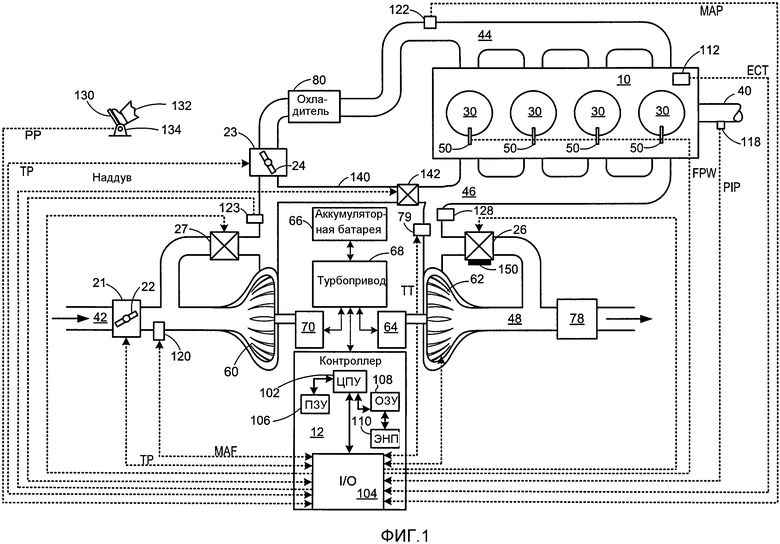
1. Способ работы регулятора давления наддува двигателя, содержащий этапы, на которых:
вычисляют регулирование управления положением с обратной связью на основе разности между существующим положением и требуемым положением привода системы оснащенного рычажным механизмом привода клапана;
прикладывают комбинированный сигнал регулировки управления положением с обратной связью и негармоническое колебание к приводу так, что привод переходит в требуемое положение с уменьшением шума, вибрации и неплавности движения, при этом негармоническое колебание является повторяющимся негармоническим колебанием, применяемым только для подмножества подъемов клапана регулятора давления наддува, ближайших к, но не соответствующих, седлу клапана системы оснащенного рычажным механизмом привода клапана.
2. Способ по п. 1, в котором негармоническое колебание является несинусоидальным.
3. Способ по п. 1, в котором негармоническое колебание является периодическим и имеет частоту наложения, определяемую на основании частоты дребезга.
4. Способ по п. 3, в котором частота дребезга представляет собой период между последовательными моментами времени, в которые клапан регулятора давления наддува системы оснащенного рычажным механизмом привода клапана устанавливает контакт с седлом клапана системы оснащенного рычажным механизмом привода клапана.
5. Способ по п. 4, в котором контакт с седлом клапана выявляют посредством контроля выходного сигнала с датчика положения привода.
6. Способ по п. 4, в котором негармоническое колебание является негармоническим по отношению к частоте дребезга.
7. Способ по п. 3, в котором частоту наложения дополнительно определяют на основании постоянной, умноженной на частоту дребезга, причем постоянная является соотношением чисел Фибоначчи.
8. Способ по п. 7, в котором отношение является одним из 2/3 и 3/2.
9. Способ работы регулятора давления наддува двигателя, содержащий этапы, на которых:
создают несинусоидальную форму сигнала на основе условий шума, вибрации и неплавности движения в регуляторе давления наддува;
вычисляют сигналы управления привода регулятора давления наддува для осуществления требуемого наддува двигателя;
накладывают несинусоидальную форму сигнала на сигналы управления и отправляют сигналы управления с наложенной несинусоидальной формой сигнала на привод регулятора давления наддува для управления регулятором давления наддува в требуемое положение с уменьшенными шумом, вибрацией и неплавностью движения.
10. Способ по п. 9, в котором несинусоидальную форму сигнала накладывают на сигналы управления для подъемов клапана регулятора давления наддува, ближайших к, но не соответствующих, седлу клапана системы оснащенного рычажным механизмом привода клапана.
11. Способ по п. 9, в котором условия шума, вибрации и неплавности хода включают в себя частоту дребезга, соответствующую периоду между последовательными моментами времени, в которые клапан регулятора давления наддува контактирует с седлом клапана, и
при этом несинусоидальная форма сигнала является периодической, форма сигнала имеет частоту наложения, определяемую на основании частоты дребезга.
12. Способ по п. 11, в котором частота наложения является произведением соотношения чисел Фибоначчи и частоты дребезга.
13. Способ по п. 11, в котором частота наложения является негармонической по отношению к частоте дребезга.
14. Способ по п. 9, в котором вычисление сигналов управления для осуществления требуемого наддува двигателя основано на условиях эксплуатации двигателя.
15. Способ работы регулятора давления наддува двигателя, содержащий этапы, на которых:
применяют регулировки управления положением с обратной связью к регулятору давления наддува через систему оснащенного рычажным механизмом привода клапана регулятора давления наддува турбонагнетателя для позиционирования регулятора давления наддува в требуемом положении регулятора давления наддува, определяемым в зависимости от условий эксплуатации двигателя; и
добавляют регулировку повторяющегося негармонического колебания к регулятору давления наддува через систему оснащенного рычажным механизмом привода клапана регулятора давления наддува турбонагнетателя, при этом повторяющееся негармоническое колебание применяют только для подмножества подъемов клапана регулятора давления наддува, которые являются ближайшими к, но не соответствующими, седлу клапана системы оснащенного рычажным механизмом привода клапана регулятора давления наддува турбонагнетателя.
16. Способ по п. 15, дополнительно содержащий этап, на котором указывают ухудшение характеристик системы оснащенного рычажным механизмом привода клапана регулятора давления наддува турбонагнетателя в ответ на выявление дребезга наряду с применением регулировок негармонического колебания.
17. Способ по п. 16, в котором негармоническое колебание является несинусоидальным, и при этом негармоническое колебание является периодическим и имеет частоту наложения, определяемую на основании частоты дребезга.
18. Способ по п. 17, в котором контакт с седлом клапана, порождающий выявленный дребезг, определяют посредством того, что контролируют выходной сигнал с датчика положения системы оснащенного рычажным механизмом привода клапана регулятора давления наддува турбонагнетателя.
| US 2006213194 A1, 28.09.2006 | |||
| CN 102678360 A, 19.09.2012 | |||
| УСТРОЙСТВО И СПОСОБ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВА ВОЗДУХА | 1992 |
|
RU2104403C1 |

