Изобретение относится к области медицины, а именно к травматологии и ортопедии, и может быть использовано при планировании и выполнении операций первичного и ревизионного эндопротезирования тазобедренного сустава с использованием трехмерных моделей костей таза и вертлужного компонента.
Известен способ планирования эндопротезирования тазобедренного сустава с использованием данных компьютерной томографии (Yi Zeng et al. Three-dimensional computerized preoperative planning of total hip arthroplasty with high-riding dislocation developmental dysplasia of the hip. Orthopaedic Surgery, May 2014 - volume 6 - Issue 2). При данном способе выполняется позиционирование трехмерной модели полусферического вертлужного компонента относительно модели костей таза с достижением желаемых углов фронтальной инклинации и антеверсии, позиции центра ротации и покрытия компонента костью.
Однако, данный способ не предусматривает планирование фиксации вертлужного компонента винтами. При сложном первичном и ревизионном эндопротезировании тазобедренного сустава в случаях недостаточной для достижения press-fit эффекта плотности кости, наличия недопокрытия вертлужного компонента или костных дефектов необходима дополнительная фиксация бесцементных вертлужных компонентов винтами. При наличии нестандартной анатомии костей таза проведение винтов с обеспечением достаточной площади контакта резьбовой поверхности с костной тканью может представлять затруднения. Также для обеспечения надежной первичной фиксации вертлужного компонента может потребоваться проведение винтов в паховую и седалищную кости, что повышает риск повреждения сосудов и нервов при неправильном подборе длины винтов.
Задача данного изобретения состоит в разработке способа предоперационного планирования фиксации вертлужного компонента винтами с последующим выполнением операции эндопротезирования тазобедренного сустава, лишенного вышеперечисленных недостатков.
Технический результат состоит в оптимальном позиционировании вертлужного компонента относительно костей таза, в максимальной площади контакта резьбовой поверхности винтов с костной тканью и уменьшении вероятности повреждения сосудов и нервов винтами.
Результат изобретения состоит в том, что на краю модели вертлужного компонента отмечают ориентир, а на его полусфере позиционируют отверстия для проведения фиксирующих винтов, через центры указанных отверстий проводят оси, на которых формируют конусы, соответствующие допустимым отклонениям проводимых винтов, с вершинами, находящимися в точках пересечения осей с наружным краем полусферы, затем совмещают полученную модель вертлужного компонента с моделью таза и задают необходимые расположение центра ротации головки эндопртеза и углы фронтальной инклинации и антеверсии, выполняют удаление костной ткани, необходимое для установки эндопротеза, далее вращают модель вертлужного компонента вокруг оси полусферы и, не меняя углы фронтальной инклинации и антеверсии компонента, подбирают необходимое количество винтов, их длины, направления и отверстия для их проведения, на модели костей таза отмечают края вертлужного компонента с ориентиром, формируют туннели, соответствующие направлению введения винтов, после чего методом трехмерной печати из стерилизуемого материала воспроизводят фрагмент полученной модели костей таза, которую используют во время операции для достижения запланированной позиции вертлужого компонента и проведения винтов согласно ранее определенным параметрам.
На фигурах изображены:
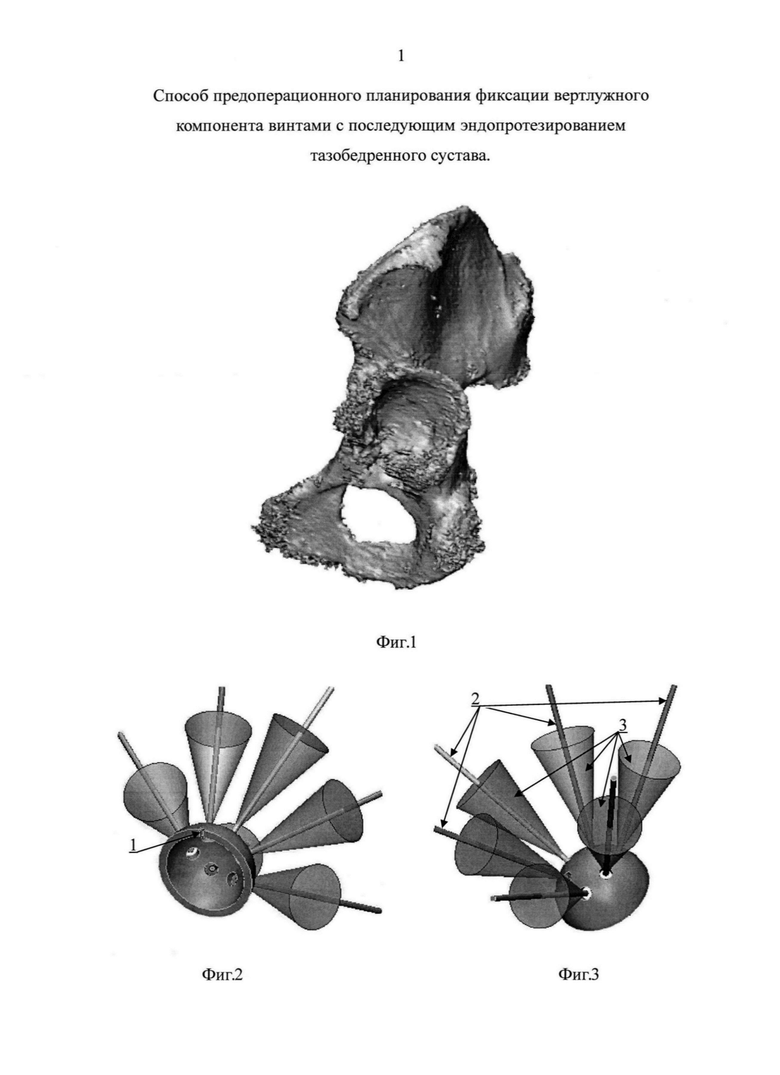
Фиг. 1. Сегментированная модель костей таза пациента после удаления рубцовых тканей.
Фиг. 2. Модель вертлужного компонента (вид изнутри полусферы), где: 1 - ориентир на краю вертлужного компонента (запирательный механизм).
Фиг. 3. Модель вертлужного компонента (вид снаружи полусферы), где: 2 - оси, перпендикулярные плоскостям каждого отверстия для проведения винтов, и проходящие через центры отверстий; 3 - конусы, соответствующие допустимому отклонению винтов в отверстиях для проведения.
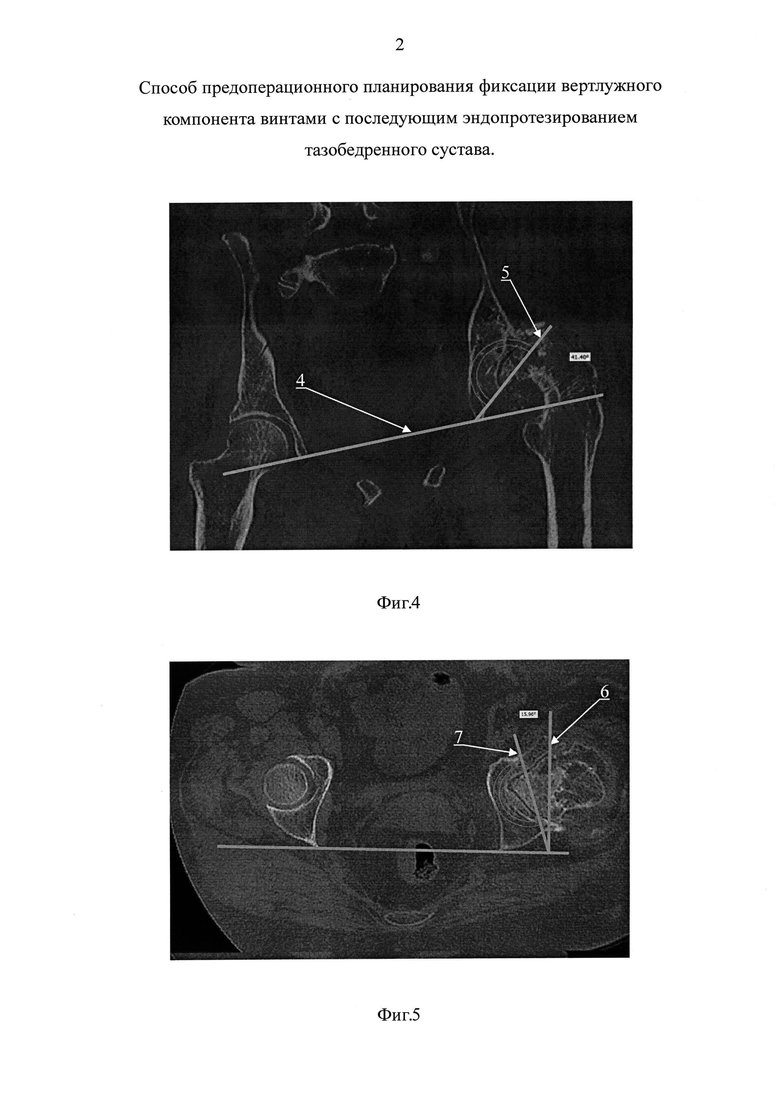
Фиг. 4. Срез компьютерной томографии таза во фронтальной плоскости с наложенной моделью вертлужного компонента для задания угла фронтальной инклинации вертлужного компонента, где: 4 - линия, проведенная через задние края вырезок вертлужных впадин; 5 - линия, проведенная через края вертлужного компонента.
Фиг. 5. Срез компьютерной томографии таза в аксиальной плоскости с наложенной моделью вертлужного компонента для задания угла антеверсии вертлужного компонента, где: 6 - линия, перпендикулярная линии, проведенной через передние края крестцово-подвздошных сочленений; 7 - линия, проведенная через края вертлужного компонента.
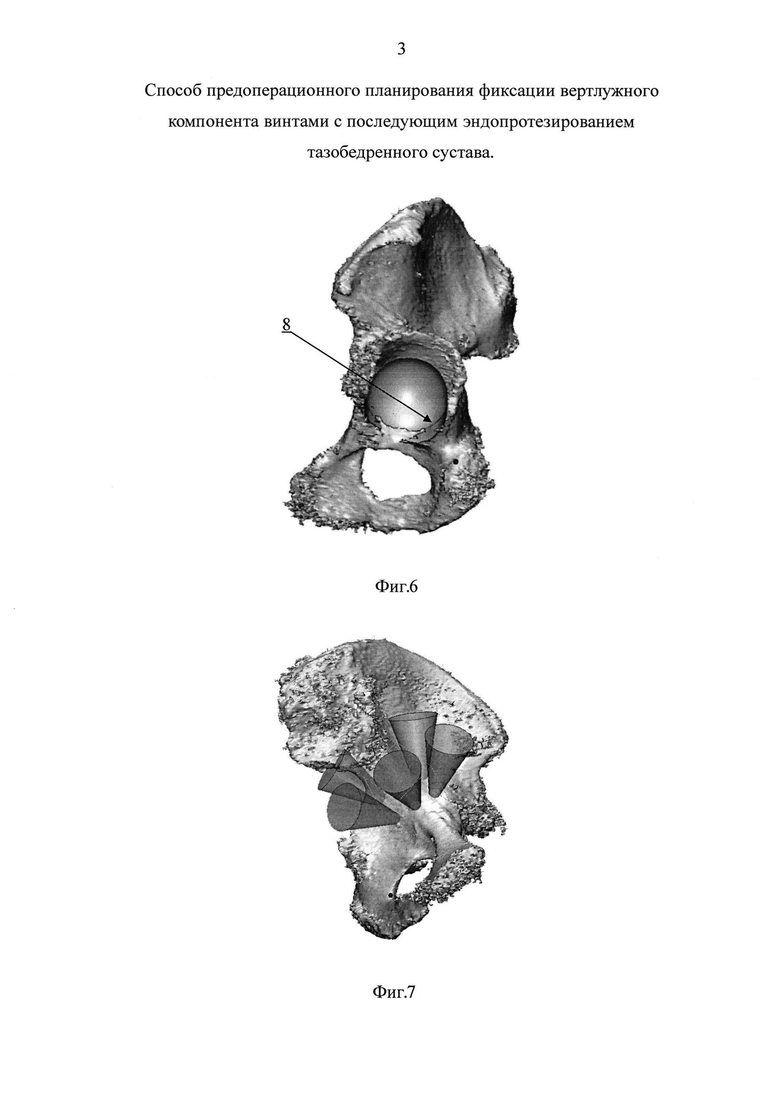
Фиг. 6. Фрагмент модели таза пациента после удаления костной ткани, накладывающейся на вертлужный компонент после совмещения моделей, где: 8 - край вертлужного компонента.
Фиг. 7. Совмещенные модели таза и вертлужного компонента, позволяющие оценить возможные направления проведения винтов (вид с медиальной стороны).
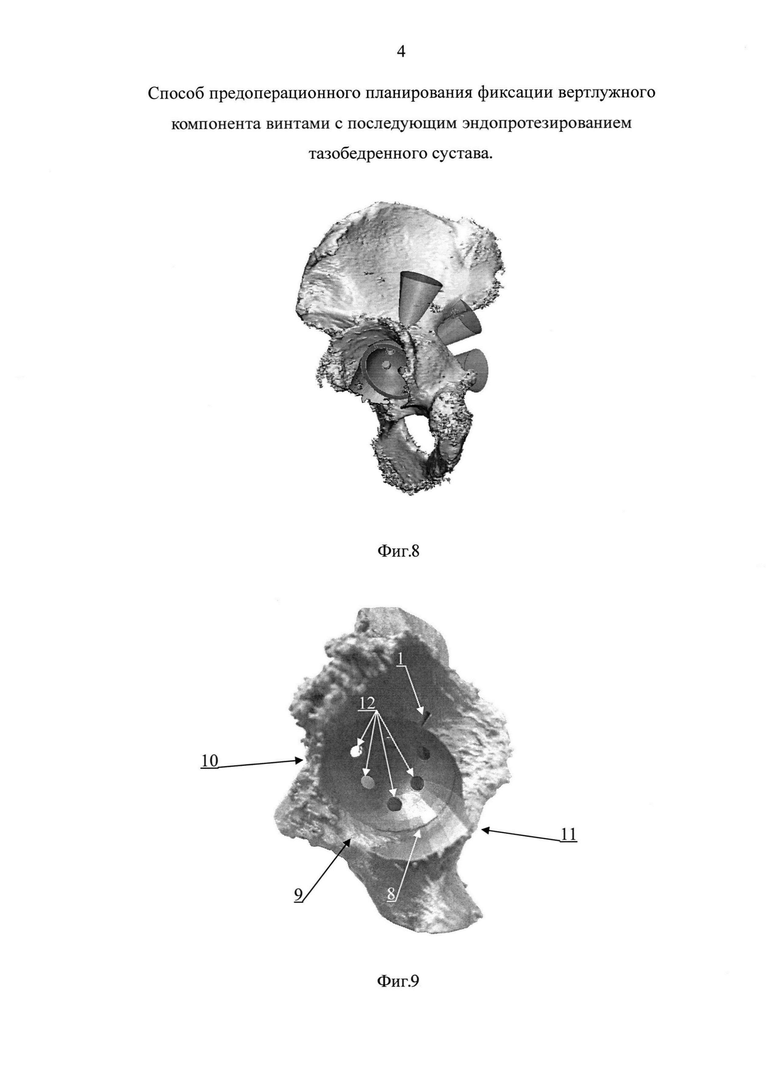
Фиг. 8. Совмещенные модели таза и вертлужного компонента, позволяющие оценить возможные направления проведения винтов (вид с латеральной стороны).
Фиг. 9. Распечатанный из стерилизуемого материала на 3D принтере фрагмент модели таза пациента для интраоперационной визуализации необходимого позиционирования вертлужного компонента относительно костей таза, где: 1 - ориентир на краю вертлужного компонента (запирательный механизм); 8 - край вертлужного компонента; 9 - вырезка вертлужной впадины; 10 - передний край вертлужной впадины; 11 - задний край вертлужной впадины; 12 - туннели, соответствующие запланированным направлениям проведения винтов.
Способ осуществляется следующим образом: на основании данных многосрезовой спиральной компьютерной томографии таза с помощью программы трехмерного графического редактора, поддерживающего форматы, используемые для хранения и обработки данных компьютерной томографии, формируют трехмерную модель таза пациента в истинном масштабе. Далее проводят сегментирование модели с удалением рубцовых тканей, имплантов, требующих удаления во время операции, и артефактов (фиг. 1). Путем наложения полусферы на область вертлужной впадины с учетом желаемого расположения центра ротации эндопротеза определяют необходимый диаметр вертлужного компонента.
Затем с помощью программы трехмерного графического редактора создают модель серийного полусферического вертлужного компонента с определенным ранее диаметром в истинном масштабе (фиг. 2, фиг. 3). На трехмерной модели компонента отмечают положение запирательного механизма 1 или иного ориентира на краю компонента, легко дифференцируемого во время операции. На полусфере модели позиционируют отверстия для проведения винтов таким образом, чтобы их расположение относительно друг друга, края компонента и выбранного ориентира на краю совпадало с таковым на серийном вертлужном компоненте определенного ранее диаметра. Через центры отверстий для проведения винтов на модели проводят оси 2, пересекающиеся в центре полусферы. Данные оси перпендикулярны плоскостям отверстий для проведения винтов. На осях формируют конусы 3 с вершинами, находящимися в точках пересечения осей с наружным краем полусферы, и углами раствора, соответствующими допустимым углам отклонения винтов для выбранной модели импланта. Информация о данных углах может быть получена из руководств по хирургической технике, предоставленных производителями имплантов. При отсутствии данной информации, угол, на который может отклоняться винт в отверстии для проведения при условии полного погружения шляпки в отверстие, определяют с помощью угломера, вертлужного компонента и винта.
Затем производят совмещение моделей таза пациента и компонента эндопротеза. Полусферу вертлужного компонента ориентируют относительно костей таза с обеспечением желаемого расположения центра ротации эндопротеза и желаемых углов фронтальной инклинации (фиг. 4) и антеверсии (фиг. 5). На модели костей таза удаляют костную ткань, накладывающуюся на вертлужный компонент (фиг. 6). В зависимости от достигнутого покрытия вертлужного компонента определяют необходимость выполнения костной пластики или использования аугментов. Затем оценивают взаимоотношение костного массива таза с осями и конусами, отражающими возможные направления проведения винтов (фиг. 7, фиг. 8), определяют желаемое взаиморасположение винтов и костей таза с соблюдением следующих условий: проведение минимум двух винтов в тело подвздошной кости (в лонную и седалищную кости - по необходимости в каждом конкретном случае), обеспечение максимальной площади контакта резьбовой поверхности винтов с костью, отсутствие значимого выстояния концов винтов в полость малого таза или брюшную полость. Путем вращения вертлужного компонента вокруг оси полусферы подбирают желаемое направление проведения винтов, не меняя углы фронтальной инклинации и антеверсии компонента.
В процессе работы с трехмерными моделями определяют следующие параметры: отверстия, в которые необходимо ввести винты (для удобства отверстия могут быть нумерованы по часовой стрелке относительно ориентира на краю компонента), длину винта для каждого выбранного отверстия, направление проведения винта для каждого выбранного отверстия - строго перпендикулярно плоскости отверстия, либо со смещением в какую-либо сторону относительно осей вертлужного компонента и ориентира на краю компонента.
Для обеспечения совпадения направления проведения винтов при предоперационном планировании и во время операции добиваются позиционирования вертлужного компонента относительно костей таза, аналогичного заданному на трехмерной модели. На модели костей таза после удаления костной ткани, необходимого для установки компонента, отмечают местонахождение края вертлужного компонента 8 с ориентиром 1 и формируют туннели 12, соответствующие запланированным направлениям введения винтов. Затем на 3D принтере из стерилизуемого материала в истинном масштабе печатают фрагмент данной модели (фиг. 9) и используют его во время операции для облегчения пространственной ориентации.
Во время обработки вертлужной впадины фрезой направление и глубину погружения фрезы задают таким образом, чтобы взаиморасположение ее краев и краев вертлужной впадины совпало со взаиморасположением краев вертлужного компонента 8 и краев вертлужной впадины 10, 11 на распечатанной модели. Аналогично ориентируют вертлужный компонент при установке; его вращение вокруг оси полусферы задают таким образом, чтобы взаиморасположение ориентира на краю компонента 1 и вырезки вертлужной впадины 9 или иного легко дифференцируемого костного ориентира соответствовало таковому на распечатанной модели. После установки вертлужного компонента выполняют рассверливание каналов через выбранные отверстия с заданием выбранных направлений проведения винтов. Длины каналов измеряют и сравнивают длинами туннелей на распечатанной модели. При совпадении данных параметров водят винты выбранной длины.
Клинический пример.
Пациентка М. 72 года, в 2017 г. поступила для оперативного лечения с жалобами на боли и ограничение движений в левом тазобедренном суставе. Диагноз при поступлении: Левосторонний диспластичекский коксартроз 3 ст.По данным рентгенографии и мультиспиральной компьютерной томографии таза и тазобедренного сустава выявлено наличие низкого вывиха головки бедренной кости (Hartofilakidis В) и дефекта крыши вертлужной впадины, что требует дополнительной фиксации вертлужного компонента винтами, оптимальное проведение которых при анатомических изменениях вертлужной впадины значительно затруднено. По этой причине предоперационное планирование и операция тотального эндопротезирования были выполнены по описанной методике. Интраоперационно бесцементный вертлужный компонент был стабильно фиксирован с помощью трех винтов, введенных в тело подвздошной кости. По результатам послеоперационной рентгенографии таза и тазобедренного сустава вертлужный компонент эндопротеза позиционирован оптимально; винты, фиксирующие вертлужный компонент, на всем протяжении резьбовой части проходят в костной ткани и не выстоят в полость малого таза.
При контрольном обследовании пациентки через 3 месяца жалобы на боль в области тазобедренного сустава отсутствуют, имеется удовлетворительный объем движений в суставе, вывихи головки эндопротеза не наблюдались. По результатам рентгенографии сохраняется правильное положение компонентов эндопротеза, признаки остеолиза и нестабильности не определяются. Пациентка удовлетворена результатом лечения, передвигается без дополнительной опоры, самостоятельно выполняет работу по дому. Способность к самообслуживанию полностью сохранена.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ предоперационного планирования фиксации вертлужного компонента винтами с последующим эндопротезированием тазобедренного сустава | 2020 |
|
RU2749850C1 |
| Способ реконструкции вертлужной впадины при посттравматическом дефекте | 2023 |
|
RU2818930C1 |
| СПОСОБ УСТАНОВКИ ИНДИВИДУАЛЬНЫХ КОНСТРУКЦИЙ В ОБЛАСТЬ ВЕРТЛУЖНОЙ ВПАДИНЫ ПРИ ОБШИРНЫХ КОСТНЫХ ДЕФЕКТАХ | 2018 |
|
RU2699732C1 |
| НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЭНДОПРОТЕЗИРОВАНИЯ ТАЗОБЕДРЕННОГО СУСТАВА | 2014 |
|
RU2592129C2 |
| СПОСОБ ВЫБОРА РЕЖИМА ПОСЛЕОПЕРАЦИОННОЙ РЕАБИЛИТАЦИИ ПОСЛЕ РЕЭНДОПРОТЕЗИРОВАНИЯ ТАЗОБЕДРЕННОГО СУСТАВА У ПАЦИЕНТОВ С ОБШИРНЫМИ КОСТНЫМИ ДЕФЕКТАМИ В ОБЛАСТИ ВЕРТЛУЖНОЙ ВПАДИНЫ | 2020 |
|
RU2753648C1 |
| Способ позиционирования вертлужного компонента эндопротеза тазобедренного сустава | 2022 |
|
RU2792550C1 |
| СПОСОБ РЕВИЗИОННОГО РЕКОНСТРУКТИВНОГО ЭНДОПРОТЕЗИРОВАНИЯ ТАЗОБЕДРЕННОГО СУСТАВА ПРИ НЕСТАБИЛЬНОСТИ КОМПОНЕНТОВ ЭНДОПРОТЕЗА, УСТАНОВЛЕННОГО В КРЫЛЕ ПОДВЗДОШНОЙ КОСТИ ПРИ ВРОЖДЕННОМ ВЫСОКОМ ВЫВИХЕ БЕДРА | 2011 |
|
RU2475197C1 |
| Устройство для замещения дефекта костной ткани вертлужной впадины | 2018 |
|
RU2713519C1 |
| Устройство для реконструкции области вертлужной впадины при эндопротезировании тазобедренного сустава у пациентов с обширными дефектами костной ткани. | 2020 |
|
RU2758125C1 |
| СПОСОБ РЕКОНСТРУКЦИИ ОБЛАСТИ ВЕРТЛУЖНОЙ ВПАДИНЫ ПРИ ОБШИРНЫХ КОСТНЫХ ДЕФЕКТАХ | 2017 |
|
RU2656522C1 |
Изобретение относится к области медицины, а именно к травматологии и ортопедии, и может быть использовано при планировании и выполнении операций первичного и ревизионного эндопротезирования тазобедренного сустава с использованием трехмерных моделей костей таза и вертлужного компонента. Формируют трехмерные модели костей таза пациента и серийного вертлужного компонента с планированием их оптимального взаимопозиционирования. На краю модели вертлужного компонента отмечают ориентир, а на его полусфере позиционируют отверстия для проведения фиксирующих винтов. Через центры указанных отверстий проводят оси, на которых формируют конусы, соответствующие допустимым отклонениям проводимых винтов, с вершинами, находящимися в точках пересечения осей с наружным краем полусферы. Затем совмещают полученную модель вертлужного компонента с моделью таза и задают необходимые расположение центра ротации головки эндопртеза и углы фронтальной инклинации и антеверсии. Выполняют удаление костной ткани в объеме, необходимом для установки вертлужного компонента эндопротеза. Далее вращают модель вертлужного компонента вокруг оси полусферы и, не меняя углы фронтальной инклинации и антеверсии компонента, подбирают необходимое количество винтов, их длину, направления и отверстия для их проведения, на модели костей таза отмечают края вертлужного компонента с ориентиром. Формируют туннели, соответствующие направлению введения винтов, после чего методом трехмерной печати из стерилизуемого материала воспроизводят фрагмент полученной модели костей таза, которую используют во время операции для достижения запланированной позиции вертлужного компонента и проведения винтов согласно ранее определенным параметрам. Способ позволяет произвести оптимальное позиционирование вертлужного компонента относительно костей таза в максимальной площади контакта резьбовой поверхности винтов с костной тканью, а также уменьшить вероятность повреждения сосудов и нервов винтами за счет создания трехмерной модели и использования трехмерного графического редактора. 9 ил., 1 пр.
Способ предоперационного планирования фиксации вертлужного компонента винтами с последующим эндопротезированием тазобедренного сустава, включающий формирование трехмерных моделей костей таза пациента и серийного вертлужного компонента с планированием их оптимального взаимопозиционирования, отличающийся тем, что на краю модели вертлужного компонента отмечают ориентир, а на его полусфере позиционируют отверстия для проведения фиксирующих винтов, через центры указанных отверстий проводят оси, на которых формируют конусы, соответствующие допустимым отклонениям проводимых винтов, с вершинами, находящимися в точках пересечения осей с наружным краем полусферы, затем совмещают полученную модель вертлужного компонента с моделью таза и задают необходимые расположение центра ротации головки эндопртеза и углы фронтальной инклинации и антеверсии, выполняют удаление костной ткани в объеме, необходимом для установки вертлужного компонента эндопротеза, далее вращают модель вертлужного компонента вокруг оси полусферы и, не меняя углы фронтальной инклинации и антеверсии компонента, подбирают необходимое количество винтов, их длину, направления и отверстия для их проведения, на модели костей таза отмечают края вертлужного компонента с ориентиром, формируют туннели, соответствующие направлению введения винтов, после чего методом трехмерной печати из стерилизуемого материала воспроизводят фрагмент полученной модели костей таза, которую используют во время операции для достижения запланированной позиции вертлужного компонента и проведения винтов согласно ранее определенным параметрам.
| ZENG Y | |||
| et al | |||
| Three-dimensional computerized preoperative planning of total hip arthroplasty with high-riding dislocation developmental dysplasia of the hip.Orthop Surg | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Способ формирования индивидуального эндопротеза тазобедренного сустава | 2015 |
|
RU2621874C2 |
| СПОСОБ МОДЕЛИРОВАНИЯ БОЛЬШОГО ВЕРТЕЛА ПРИ ЭНДОПРОТЕЗИРОВАНИИ ТАЗОБЕДРЕННОГО СУСТАВА | 2009 |
|
RU2410053C1 |
| СПОСОБ ИНТРАОПЕРАЦИОННОГО ПОЗИЦИОНИРОВАНИЯ ВЕРТЛУЖНОГО КОМПОНЕНТА ПРИ ЭНДОПРОТЕЗИРОВАНИИ ТАЗОБЕДРЕННОГО СУСТАВА | 2007 |
|
RU2367371C1 |
| БАТПЕНОВ Н | |||
| Д | |||
| и др | |||
| Математическое компьютерное моделирование биомеханического поведения модифицированной ножки эндопротеза тазобедренного сустава | |||
| Травматология и ортопедия России, N3(69), 2013, С | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |

