Изобретение относится к запирающему устройству для оборудования, имеющему выходной вал и входной вал, который соединен с выходным валом и с помощью которого выходной вал приводится в действие в нормальном режиме работы, и аварийный приводной механизм, причем выходной вал выполнен с возможностью дополнительного перевода с помощью аварийного приводного механизма из рабочего положения в конечное положение.
Кроме того, изобретение относится к исполнительной системе для оборудования, имеющей сервопривод для приведения в движение при работе с питанием от сети выходного вала, соединяемого или соединенного с оборудованием, и запирающее устройство для оборудования для приведения в движение выходного вала при исчезновении напряжения сети.
Такие запирающие устройства для оборудования известны, например, в технических системах, в которых поток массы управляется или регулируется с помощью оборудования. При этом оборудование приводится в действие в нормальном режиме работы с помощью соответствующих сервоприводов. При исчезновении напряжения сети, например, при нарушениях работы электрической сети или при прекращении гидравлического или пневматического снабжения сервоприводов, запирающие устройства для оборудования служат для перевода выходного вала в предопределенное конечное положение, чтобы перевести каждый раз подключенное оборудование в определенное конечное положение, например, открытое состояние или закрытое состояние.
Чтобы не зависеть от уже упомянутой сети, известно накопление энергии, необходимой для перевода выходного вала в желаемое конечное положение при исчезновении напряжения сети, механическим способом в спиральной пружине или винтовой пружине.
Известные запирающие устройства для оборудования помещаются в виде вставных элементов или встраиваются в исполнительные системы для оборудования уже описанного типа.
Для приведения в действие оборудования требуется, как правило, определенный крутящий момент. В известных аварийных приводных механизмах, в которых предусмотрено механическое накопление энергии в спиральной или винтовой пружине, крутящий момент, создаваемый аварийным приводным механизмом для приведения в движение выходного вала, снижается в процессе снятия нагрузки. Поэтому спиральная или винтовая пружины должны иметь такие размеры, чтобы даже по окончании движения приведения в действие еще был развит достаточный крутящий момент. Это значит, что натяжное устройство для натяжения аварийного приводного механизма должно иметь такие размеры, чтобы также преодолевалась сила пружины рядом с напряженным состоянием аварийного приводного механизма. Поэтому это натяжное устройство должно иметь, как правило, такие размеры, чтобы многократно можно было развить крутящий момент, необходимый собственно для приведения в действие выходного вала. Зачастую натяжение аварийного приводного механизма происходит с помощью уже упомянутого сервопривода для нормального режима работы, что приводит к тому, что сервопривод оказывается слишком большим для выполнения своих обычных задач.
Задачей изобретения является снижение требований при выборе размеров для исполнительной системы для оборудования.
Для решения этой задачи согласно изобретению предусмотрены признаки п. 1 формулы изобретения. В частности, согласно изобретению в запирающем устройстве для оборудования уже упомянутого типа предлагается выполнить аварийный приводной механизм в виде, по меньшей мере, одного двигателя с роликовой пружиной. Двигатели с роликовыми пружинами сами по себе известны и применяются, например, в игрушках или барабанах для обратной перемотки кабеля, в жалюзи и многом другом. Они отличаются от других средств для накопления механической энергии тем, что развитый крутящий момент в результате снятия нагрузки является почти или даже точно постоянным. Поэтому они называются также пружинами постоянной силы. Применение, по меньшей мере, одного двигателя с роликовой пружиной в аварийном приводном механизме запирающего устройства для оборудования уже описанного типа имеет то преимущество, что во время снятия нагрузки с аварийного приводного механизма нужен меньший максимальный крутящий момент. Это объясняется тем, что необходимый крутящий момент к началу процесса снятия нагрузки должен находиться лишь незначительно выше крутящего момента, необходимого для приведения в действие выходного вала при исчезновении напряжения сети. В процессе снятия нагрузки этот необходимый крутящий момент является по существу постоянным, так что при натяжении совсем не нужно многократно развивать необходимый крутящий момент аварийного приводного механизма. Благодаря этому можно выбрать явно меньшие размеры аварийного приводного механизма и натяжного устройства аварийного приводного механизма, чем это было принято до сих пор.
Приводимое здесь в действие оборудование, в котором выгодным образом можно применить изобретение, может быть вентилем или шаровым краном. Тем самым вентиль присутствует альтернативно или одновременно с аварийным приводным механизмом и выполнен с возможностью перемещения с помощью сервопривода, присоединяемого или присоединенного к входному валу.
В одной форме выполнения изобретения можно предусмотреть, чтобы, по меньшей мере, один двигатель с роликовой пружиной натягивался с помощью входного вала. При этом выгодно, что можно отказаться от дополнительного натягивающего устройства. Более того, по меньшей мере, один двигатель с роликовой пружиной в нормальном режиме работы можно натягивать с помощью сервопривода, присоединенного к входному валу.
Альтернативно или дополнительно можно предусмотреть, чтобы, по меньшей мере, один двигатель с роликовой пружиной можно было натягивать с помощью натяжного устройства. Преимущественно натяжное устройство работает от электрической сети, однако с выгодой можно применять также гидравлические или пневматические натяжные устройства. Форма выполнения с натяжным устройством выгодна тем, что выбор размеров подключенного сервопривода происходит независимо от аварийного приводного механизма и их можно согласовать с соответствующими требованиями подсоединенного оборудования.
В одной из форм выполнения изобретения можно предусмотреть, чтобы, по меньшей мере, один двигатель с роликовой пружиной имел, по меньшей мере, один пружинный элемент в виде ленты. При этом выгодно, что, по меньшей мере, один пружинный элемент в виде ленты просто наматывается или сматывается для развития желаемого крутящего момента и для натяжения.
При этом можно предусмотреть, чтобы, по меньшей мере, один пружинный элемент в виде ленты был намотан в свободном состоянии в виде спирали. Особенно хорошо, если, по меньшей мере, один пружинный элемент в виде ленты для натяжения, по меньшей мере, одного двигателя с роликовой пружиной спиралевидной намотки свободного состояния может обматывать и обматывает, по меньшей мере, один другой ролик. Для достижения повышенного крутящего момента могут быть намотаны или наматываются, по меньшей мере, два, в частности, по меньшей мере, три или более трех пружинных элементов в виде ленты для натяжения соответствующего ролика на общем ролике. При этом, по меньшей мере, два пружинных элемента в виде ленты могут контактировать в точках приложения, смещенных друг относительно друга в окружном направлении общего ролика, с общим роликом. Благодаря этому можно добиться того, что, по меньшей мере, два пружинных элемента в виде ленты в намотанном или натянутом состоянии на общем осевом участке общего ролика могут наматываться друг на друга таким образом, что образуется двухходовая намотка. И наоборот, можно также предусмотреть, что могут быть намотаны или наматываются, по меньшей мере, два, в частности, по меньшей мере, три или более трех пружинных элементов в виде ленты для натяжения общего ролика на соответствующий ролик, соответствующий отдельным пружинным элементам. При этом, по меньшей мере, два пружинных элемента в виде ленты образуют в свободном состоянии, по меньшей мере, одну двухходовую намотку. Понятия «осевой», «радиальный» и «в окружном направлении» относятся в этом описании к соответствующему ролику. Также можно предусмотреть, чтобы, по меньшей мере, два пружинных элемента в виде ленты могли быть намотаны или наматывались на отдельные друг от друга пары роликов, причем один ролик из пары роликов соединен с роликом, по меньшей мере, другой пары роликов, например, за счет установки на одной общей оси.
Особенно хорошо, если с осью на входе аварийного приводного механизма соединен или связан тот ролик, с которого сматывается, по меньшей мере, один пружинный элемент при освобождении. При этом выгодно, что этот ролик тем самым нагружается для работы на растяжение.
Таким образом, можно предусмотреть, что, по меньшей мере, один двигатель с роликовой пружиной можно натягивать путем разматывания, по меньшей мере, одного пружинного элемента, например, уже упомянутого, по меньшей мере, одного пружинного элемента в виде ленты. При этом предпочтительным является выполнение, по меньшей мере, одного пружинного элемента с возможностью сматывания его с первого ролика. Крутящий момент, который развивает при своей работе аварийный приводной механизм, зависит, таким образом, от диаметра этого первого ролика. При соответственно тонком пружинном элементе диаметр ролика при наматывании или разматывании изменяется лишь незначительно. Это особенно полезно для достижения стабильного крутящего момента.
Для накопления механической энергии можно предусмотреть, чтобы в натянутом состоянии был намотан, по меньшей мере, один пружинный элемент, например, уже упомянутый, по меньшей мере, один пружинный элемент, по меньшей мере, одного двигателя с роликовой пружиной, против преимущественного направления намотки. Для этого можно предусмотреть второй ролик, на который намотан и наматывается, по меньшей мере, один пружинный элемент для натяжения, по меньшей мере, одного двигателя с роликовой пружиной.
В одной из форм выполнения изобретения можно предусмотреть, чтобы аварийный приводной механизм имел, по меньшей мере, два параллельно включенных двигателя с роликовой пружиной. При этом выгодно, что развивающийся крутящий момент может создаваться несколькими отдельными приводными механизмами. Таким образом, можно добиться того, чтобы отдельные двигатели с роликовой пружиной могли создавать каждый раз меньший крутящий момент и тем самым предоставлять каждый раз меньший крутящий момент. При этом, под параллельным включением двигателей подразумевается система, в которой суммируются крутящие моменты, развитые отдельными двигателями. При этом, двигатели могут приводить в действие общий элемент зубчатого зацепления или несколько жестко соединенных между собой и связанных с двигателем элементов зубчатого зацепления.
При этом или в следующей форме выполнения изобретения можно предусмотреть, чтобы, по меньшей мере, один двигатель с роликовой пружиной приводил в действие выходной вал с помощью передачи. При этом выгодно, что крутящий момент, развитый отдельным двигателем с роликовой пружиной, можно привести в соответствие с крутящим моментом, необходимым для приведения в действие выходной части механизма. При этом хорошо, когда передача выполнена в виде понижающей передачи. При этом выгодно, что можно развить большой крутящий момент и перенести его на выходной вал. Предпочтительно передача выполнена как многоступенчатая передача. Таким образом, можно реализовать большие передаточные отношения в малом пространстве.
Описанная система, по меньшей мере, с двумя параллельно включенными двигателями с роликовой пружиной и/или, по меньшей мере, одним двигателем с роликовой пружиной, соединенным через понижающую передачу, способствует тому, что отдельные двигатели с роликовой пружиной могут производить только ограниченный крутящий момент. Это выгодно тем, что ролики, на которые наматываются пружинные элементы или с которых сматываются пружинные элементы, можно выполнить с большим диаметром. Это значительно продлевает срок службы двигателя или двигателей с роликовой пружиной, так как пружинные элементы испытывают меньшую нагрузку. Для многих случаев применения срок службы, достигаемый за счет меньших диаметров, является, однако, достаточным, так что представленное в этих вариантах преимущество берет верх над меньшим монтажным пространством.
Параллельное расположение нескольких двигателей с роликовой пружиной, например, двух, трех, четырех и более четырех, например, десяти или более десятка двигателей с роликовой пружиной, можно выполнить таким образом, что крутящего момента, развитого двигателем с роликовой пружиной, будет недостаточно для приведения в движение выходного вала. В отличие от резервной конструкции, в которой каждый двигатель с роликовой пружиной может сам привести в действие выходной вал, это приводит к тому, что двигатели с роликовой пружиной сообща не могут «перешагнуть» максимально необходимый или допустимый крутящий момент. Другими словами, конструкция учитывает, что отдельные двигатели с роликовой пружиной не могут выключаться по отдельности.
Применение параллельного включения двигателей с роликовой пружиной имеет, кроме того, такое преимущество, что можно реализовать блочную конструкцию, в которую по мере надобности можно встраивать отдельные двигатели с роликовой пружиной или несколько двигателей с роликовой пружиной. Так можно раскрывать или воспроизводить последовательность крутящих моментов сервоприводов. Например, можно реализовать последовательность 60 Нм, 120 Нм и 240 Нм.
Заявленное решение самостоятельного изобретательского значения предусматривает в запирающем устройстве для оборудования указанного типа то, что аварийный приводной механизм соединен с выходным валом с помощью совмещающей передачи. При этом выгодно, что натяжение аварийного приводного механизма и подключение аварийного приводного механизма при исчезновении напряжения сети можно легко осуществить. При этом, под совмещающей передачей понимается передача с двумя точками входа и одним выходным валом, причем крутящие моменты, каждый раз вводимые через точки входа, при необходимости, с перестановкой с помощью преобразования, суммируются на выходном валу. Благодаря применению совмещающей передачи можно отказаться от соединений в потоке силовых линий аварийного приводного механизма. Особенно хорошо, когда совмещающая передача выполнена в виде дифференциальной передачи или планетарной передачи, в частности, по компановке как планетарный механизм или по принципу работы как четырехколесная планетарная передача, причем дополнительные планетарные колеса могут присутствовать для усиления. В этом случае упомянутые точки входа заданы входным валом и планетарной опорой. Особенно хорошо, когда аварийный приводной механизм в заявленном запирающем устройстве для оборудования уже описанного типа выполнен, в частности, согласно п. 1 формулы изобретения. При этом выгодно, что описанные преимущества двигателя с роликовой пружиной можно комбинировать с описанным включением крутящего момента аварийного приводного механизма при исчезновении напряжения сети. Применяемую планетарную передачу можно, например, охарактеризовать так, что имеются два солнечных колеса, расположенных преимущественно коаксиально, причем первое из двух солнечных колес соединено с входным валом, а второе солнечное колесо - с выходным валом совмещающей передачи, и солнечные колеса соединены между собой, по меньшей мере, в один планетарный комплект. По меньшей мере, один планетарный комплект может при этом иметь одно единственное планетарное колесо, входящее в зацепление с обоими солнечными колесами, или два жестко соединенных между собой на одной оси планетарных колеса, каждое из которых входит в зацепление только с одним из двух солнечных колес. Предпочтительно по окружности солнечных колес располагается столько планетарных комплектов, сколько составляет разница в количестве зубьев солнечных колес. Особенно хорошо, когда каждый планетарный комплект имеет единое число зубьев. При применении планетарных передач преимущество заключается в том, что между входным валом и выходным валом совмещающей передачи устанавливается передаточное отношение примерно 1. При описанном типе совмещающей передачи преимущество заключается, кроме того, в том, что сохраняется направление вращения между входным валом и выходным валом и, в частности, можно избежать изменения направления вращения. Предпочтительно передаточное отношение составляет между 0.8 и 1.2, преимущественно между 0.9 и 0.95 или между 1.05 и 1.1. Кроме того, выгодно, что аварийный приводной механизм, например, двигатель с роликовой пружиной описанного типа, может соединяться с выходным валом с помощью планетарной опоры, на которую опирается, по меньшей мере, один планетарный комплект. Здесь можно добиться передаточных отношений более чем 8, предпочтительно 10 или более 10, например 15, от аварийного приводного механизма к выходному валу. Таким образом, аварийный приводной механизм может развивать с помощью выходного вала необходимый, сравнительно высокий крутящий момент для запирания оборудования, отпирания оборудования или того и другого.
В одной из форм выполнения можно предусмотреть, чтобы входной вал и выходной вал были связаны между собой с помощью совмещающей передачи, например, уже упомянутой совмещающей передачи. При этом выгодно, что есть простая возможность подключения аварийного приводного механизма в потоке силовых линий между входным валом и выходным валом.
В другой форме выполнения изобретения можно предусмотреть, чтобы аварийный приводной механизм приводил в действие планетарную опору, в частности, уже упомянутой совмещающей передачи. При этом выгодно, что передаточное отношение между входным валом и выходным валом составляет почти или точно 1:1. Это особенно хорошо для возможности достижения одинаковых размеров (расчетный крутящий момент, расчетное число оборотов и т.д.) подключаемого сервопривода, как это было бы необходимо без описанного запирающего устройства для оборудования (т.е. без дополнительного аварийного приводного механизма). Благодаря этому возможно очень простое оснащение, например, при комбинировании уже существующего оборудования с сервоприводом.
В одной из форм выполнения изобретения можно предусмотреть, чтобы было регулировочное устройство, которое регулирует натяжное устройство приводного механизма таким образом, чтобы компенсировать движение вращения входного вала так, чтобы сохранять желаемое движение вращения, в частности, останов выходного вала при натяжении аварийного приводного механизма. Например, желаемое движение вращения может иметь число оборотов, равное нулю, т.е. имеет место состояние покоя, или движение вращения может иметь постоянное число оборотов. При этом выгодно, что возможно натяжение аварийного приводного механизма без перестановки оборудования. Это особенно выгодно, когда натяжение аварийного приводного механизма неизбежно влечет за собой движение вращения или движение качания или линейное движение соответствующей точки входа на совмещающей передаче, как это имеет место при наличии двигателя с роликовой пружиной.
К тому же способ регулирования относится к самостоятельному изобретательскому свойству, при котором число оборотов и/или крутящий момент натяжного устройства таков, что движение вращения (здесь с помощью сервопривода) компенсируется на входном валу совмещающей передачи таким образом, что выходной вал совмещающей передачи, контролируемый датчиком, выполняет желаемое движение вращения, например, стабильное движение вращения или остановку. Вместо движения вращения выходного вала или дополнительно к нему можно с помощью соответствующих датчиков контролировать движения на точках входа совмещающей передачи. С помощью известных или сохраненных передаточных отношений совмещающей передачи можно определить движение вращения выходного вала для контроля.
При этом можно предусмотреть наличие датчика для детектирования вращательного движения выходного вала. Предпочтительно датчик соединен с регулировочным устройством. Таким образом, можно образовать регулирующий контур в одной из форм выполнения.
В другой форме выполнения изобретения, имеющей самостоятельное изобретательское значение, в запирающем устройстве для оборудования уже описанного типа предусмотрено наличие фиксирующего устройства для блокирования аварийного приводного механизма при работе с питанием от сети и/или для освобождения аварийного приводного механизма при исчезновении напряжения сети. При этом выгодно, что аварийный приводной механизм в нормальном эксплуатационном режиме можно отключить простым способом. Например, при этом можно предусмотреть, чтобы фиксирующее устройство освобождало аварийный приводной механизм автоматически при выявленном исчезновении напряжения сети. При этом, фиксирующее устройство служит для прерывания потока силовых линий в одном направлении или в обоих направлениях. Предпочтительно такое выполнение имеет дополнительно признаки п. 1 и/или п. 5 формулы изобретения.
В одной из форм выполнения изобретения можно предусмотреть, чтобы фиксирующее устройство было выполнено в виде самотормозящейся передачи, приводимой в действие аварийным приводным механизмом. При этом выгодно, что простым способом можно добиться того, чтобы аварийный приводной механизм был отделен от главной магистрали между входным валом и выходным валом. Для натяжения аварийного приводного механизма, поскольку последний приводится в действие механически, можно предусмотреть отдельное натяжное устройство. Однако также можно предусмотреть пневматическое, электрическое или гидравлическое приведение в действие аварийного приводного механизма.
В одной из форм выполнения изобретения можно предусмотреть, чтобы фиксирующее устройство имело защелку, выполненную с возможностью перемещения между фиксирующим положением и свободным положением, причем защелка в фиксирующем положении взаимодействует с возможностью фиксации с элементом передачи, приводимым в действие аварийным приводным механизмом. Таким образом, можно добиться того, что фиксирующее устройство блокирует аварийный приводной механизм или уже упомянутую совмещающую передачу или другой элемент передачи в потоке силовых линий между аварийным приводным механизмом и выходным валом.
В одной из форм выполнения изобретения можно предусмотреть, чтобы элемент передачи представлял собой планетарную опору, например, уже упомянутую планетарную опору совмещающей передачи. При этом выгодно, что простым способом, регулируя, можно определить, отводится ли крутящий момент, развитый аварийным приводным механизмом, в поток силовых линий между входным валом и выходным валом или нет.
В одной из форм выполнения изобретения можно предусмотреть наличие выключающего расцепляющего механизма для перевода защелки, например, уже упомянутой защелки, в свободное положение. При этом выгодно, что блокировку фиксирующего устройства можно отменить простым способом. Особенно хорошо, если выключающий расцепляющий механизм приводится в действие при помощи двигателя. Его можно привести в действие от двигателя с помощью электричества, пневматики или гидравлики.
В другой форме выполнения изобретения можно предусмотреть, чтобы выключающий расцепляющий механизм, в частности, упомянутый выше выключающий расцепляющий механизм, в частности, упомянутой выше защелки фиксирующего устройства был выполнен в виде подъемного электромагнита. При этом выгодно, что выключающий расцепляющий механизм способен удерживаться в фиксирующем положении с помощью электромагнита, так что при исчезновении напряжения сети фиксирующее устройство автоматически отключает поток силовых линий от аварийного приводного механизма. Подъемный электромагнит может быть при этом соединен с возвратной пружиной.
В одной из форм выполнения изобретения можно предусмотреть выполнение защелки на свободном конце коленчатого рычага. При этом выгодно, что с помощью коленчатого рычага, находящегося в вытянутом состоянии, можно создать большую удерживающую силу. И, наоборот, при применении коленчатого рычага возникает такое преимущество, что начальное усилие для расцепления защелки при вытянутом состоянии коленчатого рычага должно быть незначительным. Под коленчатым рычагом вообще понимаются два подвижно соединенных между собой колена, шарнирно соединенных с концом, отдаленным от соединяющего шарнира, причем другой конец, отдаленный от соединяющего шарнира, выполнен как свободный конец.
В одной из форм выполнения изобретения можно предусмотреть, чтобы выключающий расцепляющий механизм, например, упомянутый выше выключающий расцепляющий механизм, например, упомянутого выше фиксирующего устройства, воздействовал на шарнир коленчатого рычага. Предпочтительно выключающий расцепляющий механизм воздействует в поперечном направлении на вытянутый коленчатый рычаг. При этом выгодно, что сила, созданная выключающим расцепляющим механизмом в начале движения расцепления, может передаваться на защелку с высоким передаточным отношением, причем передаточное отношение уменьшается в ходе движения расцепления. Таким образом, защелка может отцепляться даже тогда, когда зафиксированный элемент передачи оказывает усилие или момент на защелку и тем самым препятствует движению защелки.
Для решения указанной задачи согласно изобретению в исполнительной системе для оборудования предусмотрены признаки п. 12 формулы. В частности, таким образом, согласно изобретению в исполнительной системе для оборудования уже упомянутого типа предлагается выполнить запирающее устройство для оборудования согласно изобретению, в частности, как это описано в п.п. 1-11 формулы. При этом выгодно, что сервопривод исполнительной системы для оборудования может иметь самые малые размеры и аварийный приводной механизм выполнен с возможностью подключения очень простым способом и с возможностью отделения от потока силовых линий между входным валом и выходным валом.
В одной выгодной форме выполнения можно предусмотреть объединение запирающего устройства для оборудования с сервоприводом. При этом выгодно, что получается компактная исполнительная система для оборудования.
Альтернативно или дополнительно можно предусмотреть, чтобы запирающее устройство для оборудования было соединено с сервоприводом в виде отдельного узла с возможностью разъединения. При этом выгодно, что запирающее устройство можно дооснастить и комбинировать со множеством сервоприводов для образования заявленной исполнительной системы для оборудования.
В одной из форм выполнения изобретения можно предусмотреть присоединение оборудования к выходному валу для создания кинематической связи. При этом выгодно, что исполнительную систему можно применять в технической системе с оборудованием, в котором регулируется поток массы.
Теперь изобретение описывается более подробно с помощью примеров выполнения, однако не ограничивается только этими примерами. Другие примеры выполнения получаются в результате сочетания признаков отдельных или нескольких пунктов формулы и/или отдельных или нескольких признаков примеров выполнения.
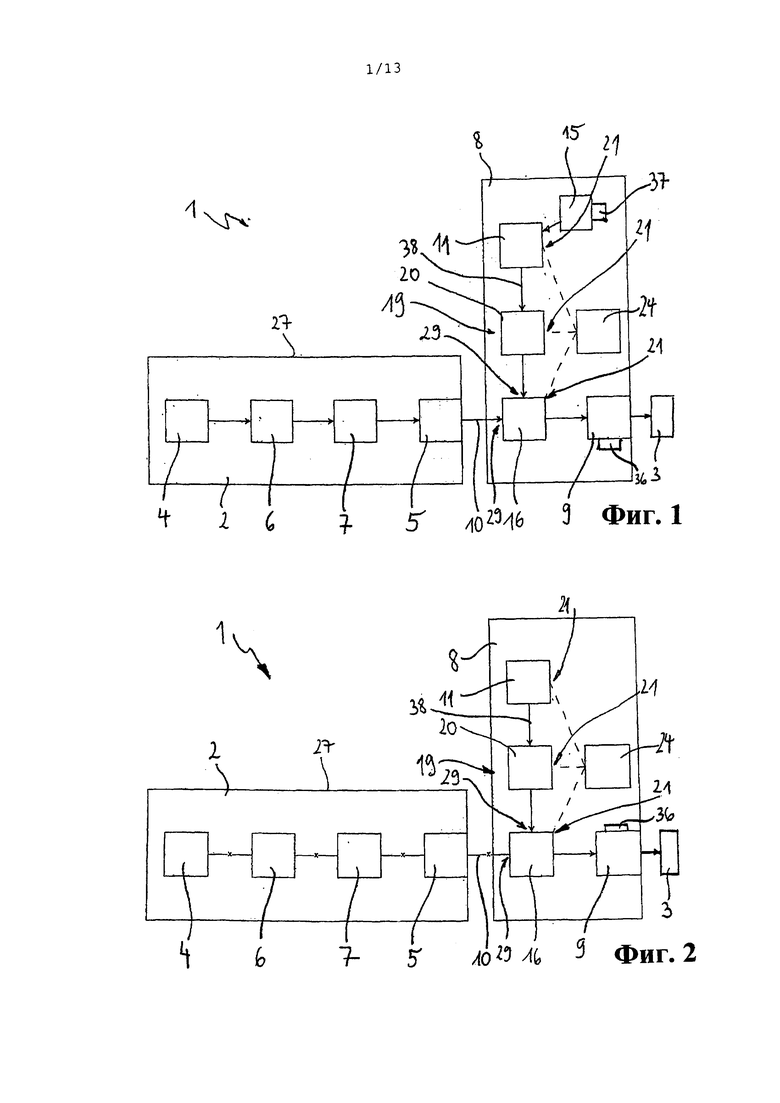
Фиг. 1 схематичное изображение блоков заявленной исполнительной системы для оборудования с заявленным запирающим устройством и сервоприводом для раскрытия заявленного принципа действия,
Фиг. 2 поток силовых линий при исчезновении напряжения сети в исполнительной системе для оборудования согласно Фиг. 1,
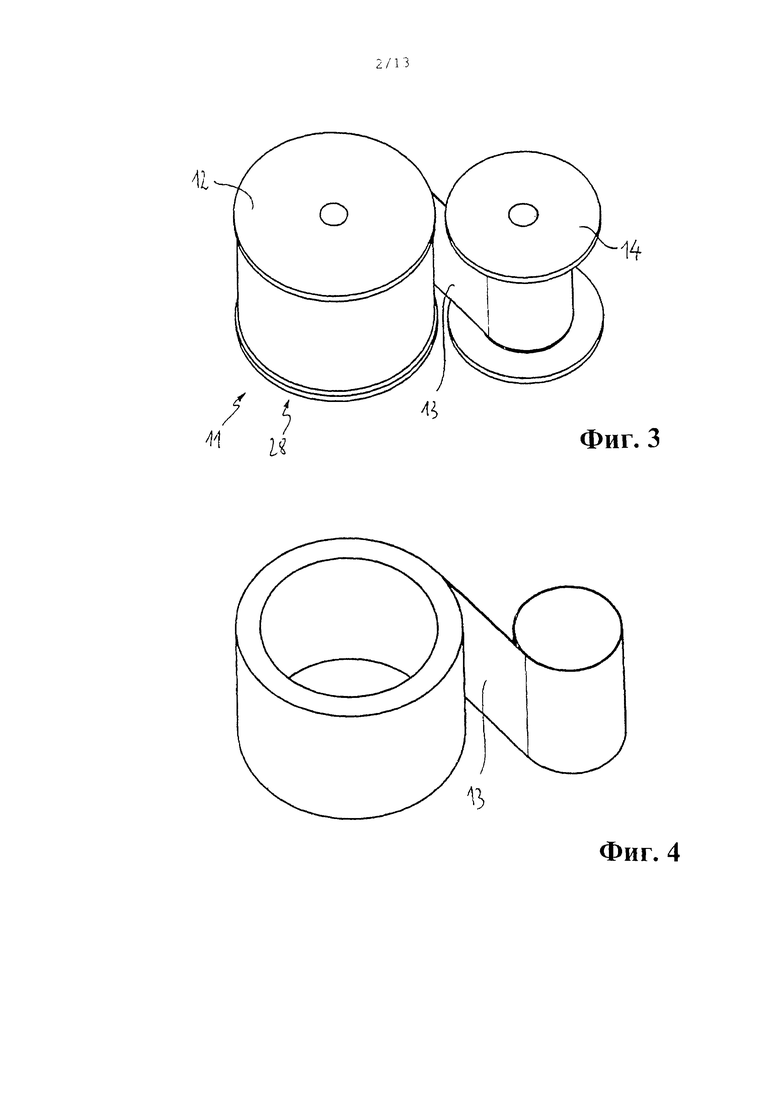
Фиг. 3 двигатель с роликовой пружиной исполнительной системы согласно Фиг. 1,
Фиг. 4 намотанный, натянутый в виде ленты пружинный элемент двигателя с роликовой пружиной согласно Фиг. 3,
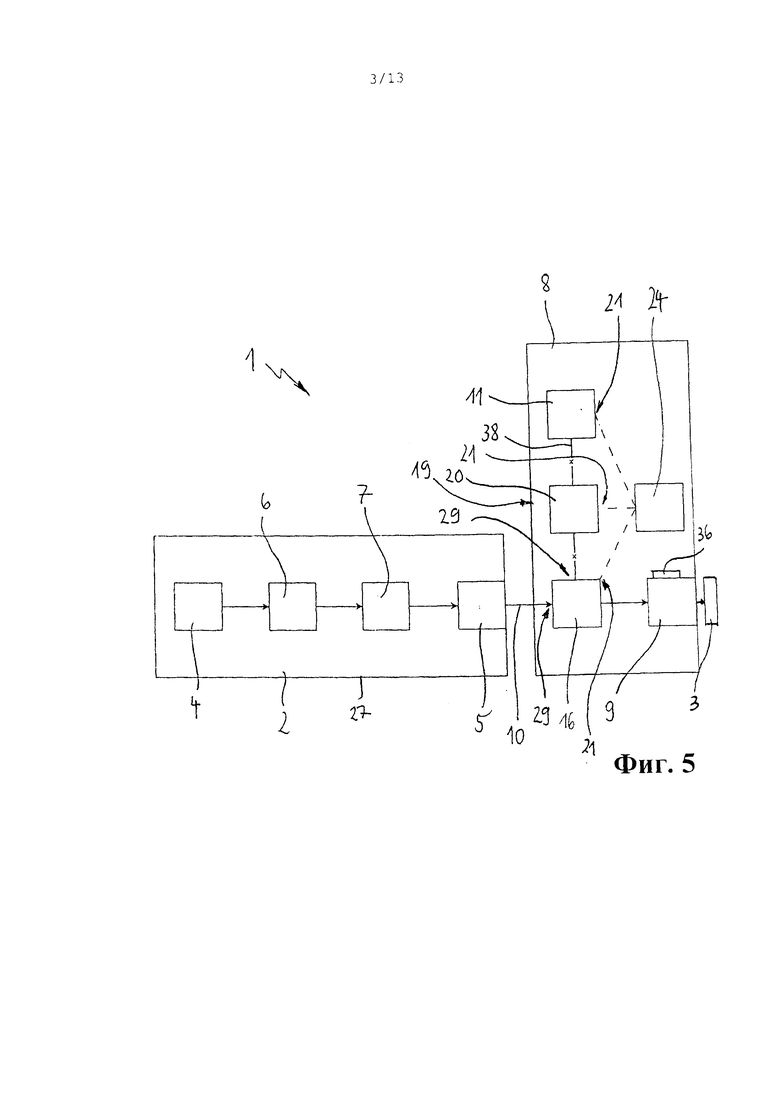
Фиг. 5 поток силовых линий в исполнительной системе для оборудования согласно Фиг. 1 в штатном режиме работы,
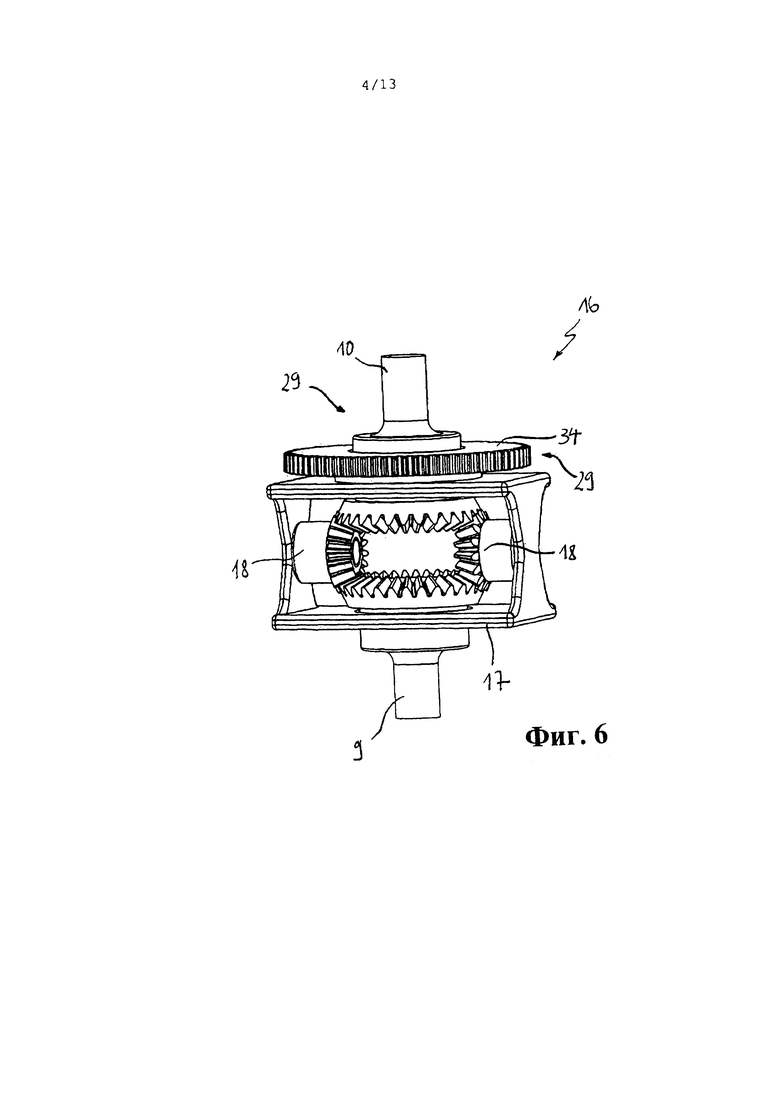
Фиг. 6 совмещающая передача исполнительной системы для оборудования согласно Фиг. 1 в трехмерном изображении со срезом,
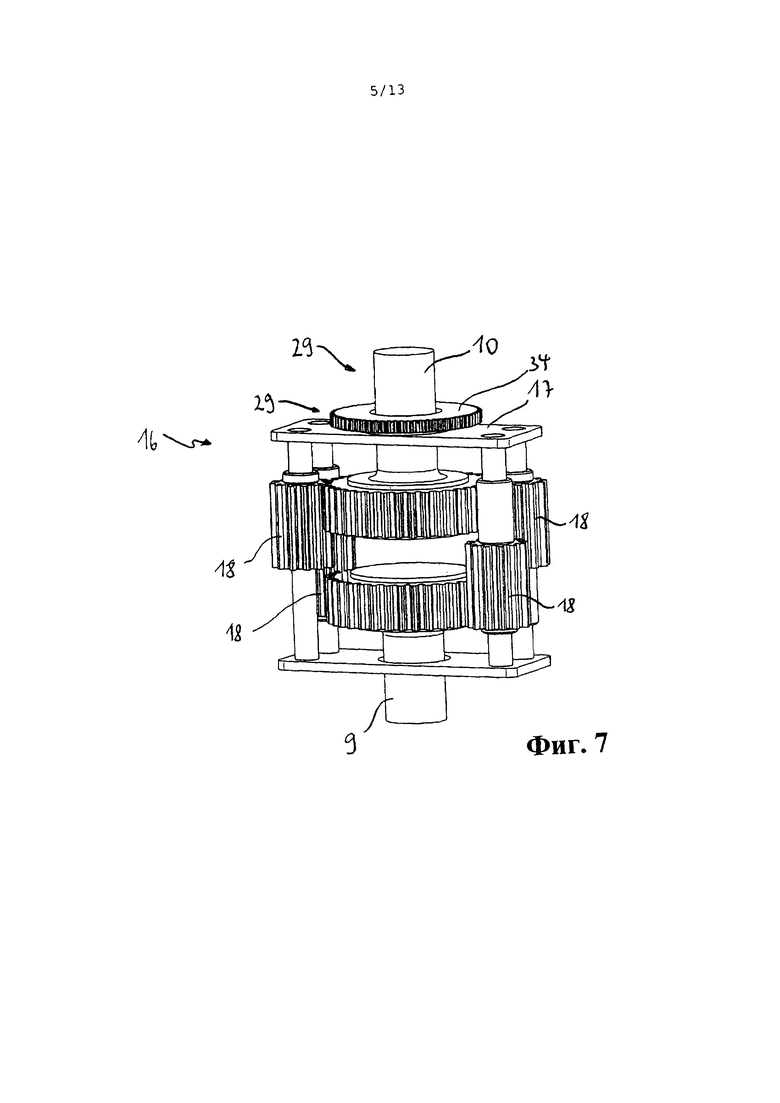
Фиг. 7 другая совмещающая передача исполнительной системы для оборудования согласно Фиг. 1,
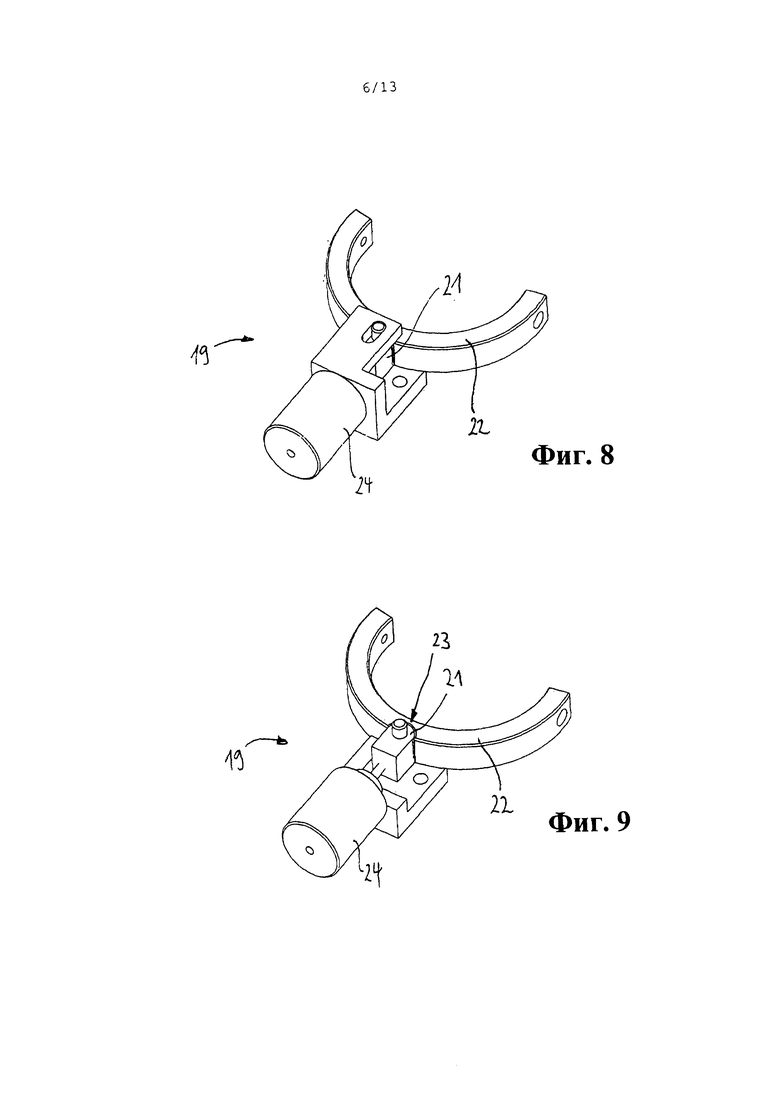
Фиг. 8 фиксирующее устройство исполнительной системы для оборудования согласно Фиг. 1,
Фиг. 9 фиксирующее устройство (частичный вырез) согласно Фиг. 8,
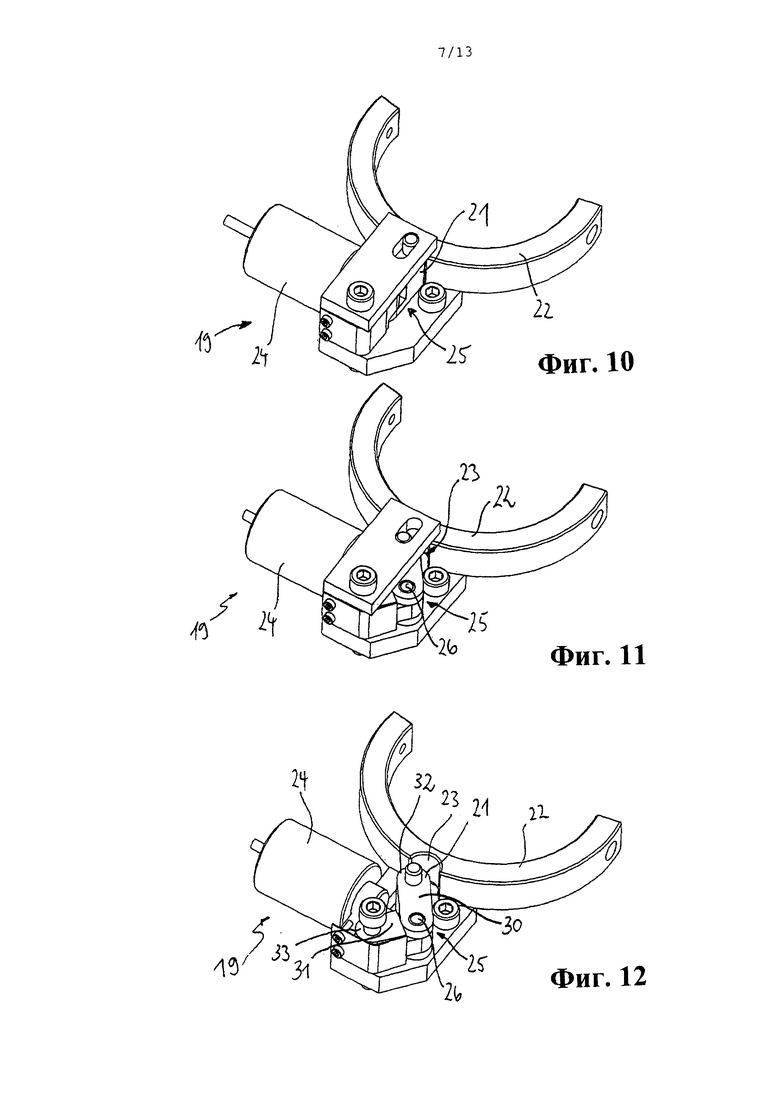
Фиг. 10 другое фиксирующее устройство исполнительной системы для оборудования согласно Фиг. 1 с коленчатым рычагом,
Фиг. 11 фиксирующее устройство согласно Фиг. 10 в расцепленном или освобожденном положении,
Фиг. 12 фиксирующее устройство в положении согласно Фиг. 11 (частичный вырез),
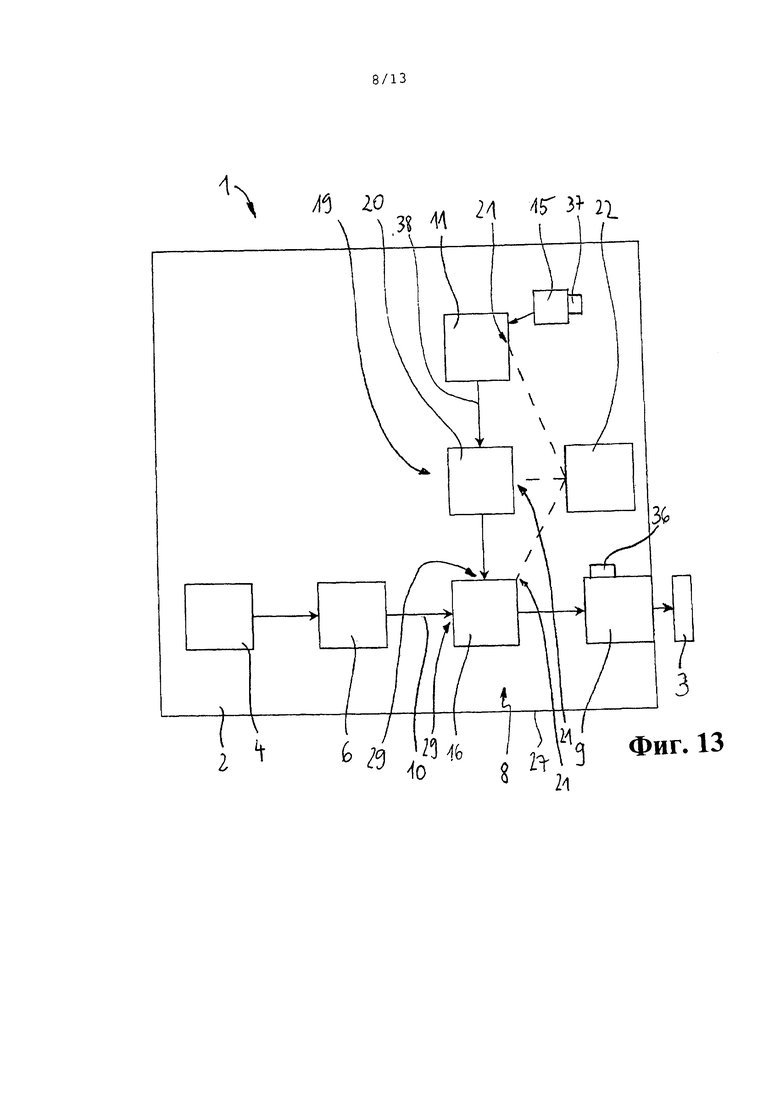
Фиг. 13 другая заявленная исполнительная система для оборудования со встроенным заявленным запирающим устройством,
Фиг. 14 другая заявленная форма выполнения аварийного приводного механизма с двумя пружинными элементами в виде лент,
Фиг. 15 другая заявленная форма выполнения аварийного приводного механизма с тремя пружинными элементами в виде лент,
Фиг. 16 еще одна заявленная форма выполнения совмещающей передачи,
Фиг. 17 аварийный приводной механизм другой заявленной формы выполнения с несколькими двигателями с роликовыми пружинами,
Фиг. 18 совмещающая передача заявленной исполнительной системы для оборудования,
Фиг. 19 принцип действия совмещающей передачи согласно Фиг. 18.
На Фиг. 1 представлена в целом обозначенная позицией 1 заявленная исполнительная система для оборудования в виде блоков в сильно упрощенном виде.
Исполнительная система для оборудования 1 имеет сервопривод 2, с помощью которого приводится в действие присоединяемое или присоединенное оборудование 3.
При этом сервопривод 2 имеет известным образом двигатель 4, с помощью которого может приводиться в действие выходная часть механизма 5.
При этом двигатель 4 может запускаться с помощью электропривода, пневмопривода или гидравлического привода.
Между двигателем 4 и выходной частью механизма 5 расположены известным образом тормозной механизм 6 и передача 7. С помощью тормозного механизма 6 можно прервать поток силовых линий между двигателем 4 и выходной частью механизма 5. Тормозной механизм 6 может, при необходимости, отсутствовать, если передача 7 является самотормозящейся.
Между сервоприводом 2 и оборудованием 3 находится заявленное запирающее устройство для оборудования 8, которое будет описано ниже более подробно.
Запирающее устройство для оборудования 8 имеет выходной вал 9, к которому может присоединяться уже упомянутое оборудование 3 для получения кинематической связи. На Фиг. 1 показано присоединенное оборудование 3 после создания кинематической связи.
Запирающее устройство для оборудования 8 имеет, кроме того, входной вал 10.
К входному валу 10 можно присоединить уже упомянутый сервопривод 2.
На Фиг. 1 показан сервопривод 2, присоединенный к запирающему устройству для оборудования 8. Соединение в примере выполнения согласно Фиг. 1 является разъемным, а запирающее устройство для оборудования 8 выполнено в виде отдельного узла.
Входной вал 10 соединен с выходным валом 9, так что выходной вал 9 запускается в штатном режиме с помощью сервопривода 2 для приведения в действие оборудования 3 или другого подсоединенного оборудования.
Запирающее устройство для оборудования 8 имеет, кроме того, аварийный приводной механизм 11. С помощью аварийного приводного механизма 11, запускаемого от электромотора, механическим путем, с помощью пневмопривода или гидравлического привода, выходной вал 9 при исчезновении напряжения сети, т.е. когда сервопривод 2 не работает, можно приводить в действие, по меньшей мере, так долго, что выходной вал 9 переводится в определенное конечное положение.
Это конечное положение можно определить так, что подключенное оборудование оказывается в определенном конечном состоянии, например, полностью закрытом состоянии или полностью открытом состоянии.
На Фиг. 2 показан поток силовых линий при исчезновении напряжения сети.
Знаком «х» показано, что поток силовых линий между двигателем 4 и входным валом 10 заблокирован. Этого можно добиться, например, за счет того, что при исчезновении напряжения сети автоматически вступает в действие тормозной механизм 6.
В этом случае предусмотрено, что аварийный приводной механизм 11 приводит в действие выходной вал 9 уже описанным образом.
В показанном примере выполнения аварийный приводной механизм 11 для механической работы выполнен в виде двигателя с роликовой пружиной.
Такой двигатель с роликовой пружиной 28 в виде аварийного приводного механизма 11 показан на Фиг. 3.
Приводной механизм 11 имеет первый ролик 12, на который намотан пружинный элемент в виде ленты 13.
На Фиг. 3 представлен аварийный приводной механизм 11 в натянутом состоянии.
На Фиг. 4 показан пружинный элемент 13 аварийного приводного механизма 11 из Фиг. 3.
Видно, что пружинный элемент 13 намотан на первый ролик 12 в виде спирали.
Аварийный приводной механизм 11 имеет второй ролик 14, который в натянутом состоянии согласно Фиг. 3 еще не обмотан.
Для натяжения аварийного приводного механизма 11 пружинный элемент в виде ленты 13 наматывается, таким образом, на первый ролик 12.
При этом пружинный элемент 13 сматывается со второго ролика 14. Пружинный элемент 13 наматывается, таким образом, со второго ролика 14 на первый ролик 12.
При сматывании/наматывании первый ролик 12 и второй ролик 14 вращаются навстречу друг другу.
В результате достигается то, что в натянутом состоянии аварийного приводного механизма 11, т.е. когда пружинный элемент 13 полностью намотан на первый ролик 12, пружинный элемент 13 намотан против преимущественного направления намотки.
Если затем аварийный приводной механизм 11 предоставлен сам себе, пружинный элемент 13 освобождается, наматываясь на второй ролик 14.
За счет результирующего движения первого ролика 12 или второго ролика 14 выходной вал 9 приводится в действие до тех пор, пока не достигнет желаемого конечного положения.
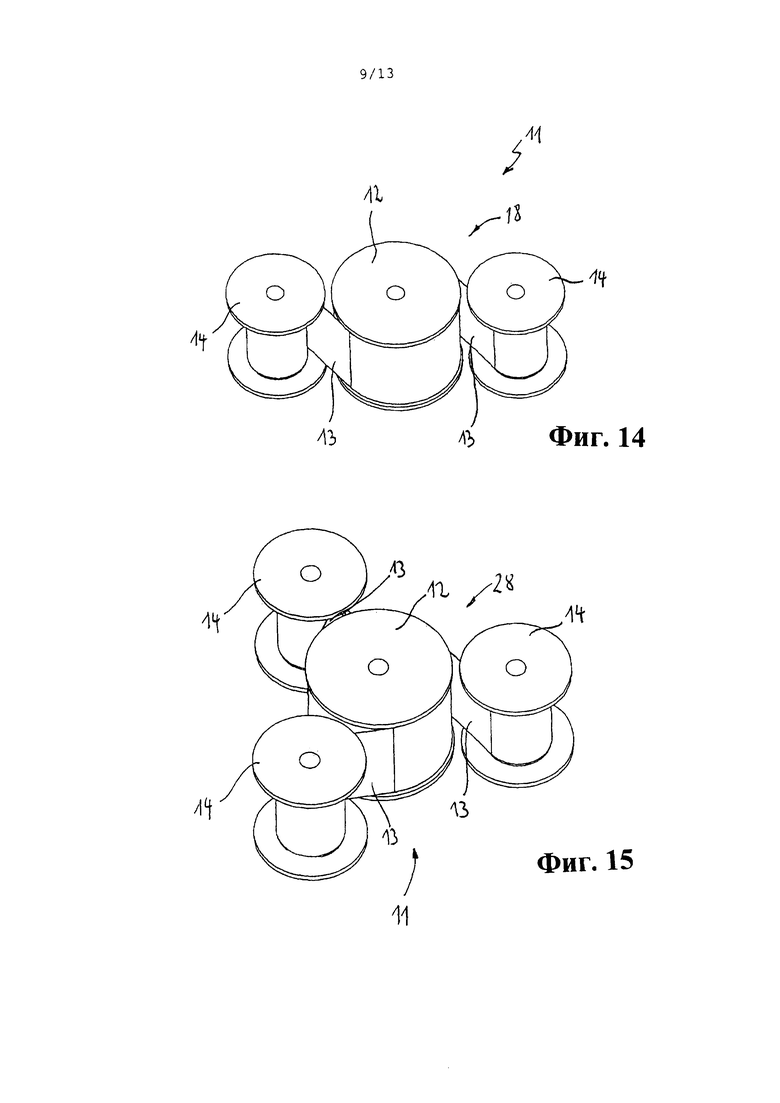
Вместо двигателя с роликовой пружиной 28 согласно Фиг. 3 и 4 в показанном заявленном запирающем устройстве для оборудования 8 можно использовать двигатель с роликовой пружиной 28 согласно Фиг. 14 или двигатель с роликовой пружиной 28 согласно Фиг. 15.
Для Фиг. 14 и 15 соответственно подходят выполнения к Фиг. 3 и 4.
Двигатель с роликовой пружиной 28 аварийного приводного механизма 11 согласно Фиг. 14 отличается от двигателя с роликовой пружиной 28 согласно Фиг. 3 наличием двух пружинных элементов в виде ленты 13, смещенных в окружном направлении друг относительно друга и контактирующих с роликом 12, который держит пружинные элементы 13 в натянутом состоянии.
Благодаря этому получается намоточная конструкция, в которой пружинные элементы 13 образуют двухходовую намотку, т.е. намотку, в которой пружинные элементы 13 образуют в радиальном направлении попеременно следующие друг за другом слои.
При ослаблении натяжения каждый пружинный элемент 13 наматывается на отдельный ролик 14.
Приводной вал 38 (ср. Фиг. 1) аварийного приводного механизма 11, с помощью которого аварийный приводной механизм 11 воздействует на совмещающую передачу 16, соединен с роликом 12. Тем самым этот приводной вал 38 работает на растяжение от пружинных элементов 13 при ослаблении натяжения, что выгодно для передачи силы.
На Фиг. 15 представлен аварийный приводной механизм 11 с двигателем с роликовой пружиной 28 с тремя пружинными элементами в виде лент 13. Таким образом, получается трехходовая намотка в натянутом состоянии. В общем, примеры выполнения подходят для Фиг. 14.
В других примерах выполнения более трех пружинных элементов 13 воздействуют на один общий ролик 12, чтобы в натянутом состоянии образовывать многослойную намотку. Можно также предусмотреть, чтобы эта одно-, двух- или многослойная намотка определяла натянутое состояние. И здесь удачно, если приводной вал 38 соединен с роликом или роликами 12, 14, который при ослаблении натяжения работает на растяжение благодаря пружинному элементу/пружинным элементам.
На Фиг. 1 видно натяжное устройство 15, с помощью которого можно натягивать аварийный приводной механизм 11. Натяжное устройство 15 можно при этом приводить в действие с помощью электромотора, пневматического или гидравлического привода или другим способом, например, также вручную.
Натяжение аварийного приводного механизма 11 можно выполнить также без отдельного натяжного устройства 15 с помощью сервопривода 2.
Зачастую передаточное отношение передачи 20 (здесь не являющейся самотормозящейся) выбрано таким, что натяжение аварийного приводного механизма 11 невозможно с помощью двигателя. Тогда есть натяжное устройство 15.
В другом примере выполнения натяжение аварийного приводного механизма 11 возможно и происходит в сочетании, т.е. во взаимодействии сервопривода 2 с натяжным устройством 15.
Для этого запирающее устройство для оборудования 8 имеет датчик 36. Датчик 36 может быть выполнен как датчик положения, датчик частоты вращения, датчик крутящего момента или т.п. для обнаружения и/или определения отличия от состояния покоя выходного вала 9.
Регулировочное устройство 37 выполнено при этом так, что вращательное движение входного вала 10 компенсируется с помощью сервопривода 2 за счет движения планетарной опоры 17 как раз таким образом, что достигается желаемое вращательное движение выходного вала 9, например останов. Тем самым можно, например, добиться того, что подсоединенное оборудование 3 во время натяжения аварийного приводного механизма 11 не перемещается. Например, так можно удерживать в открытом или закрытом положении вентиль оборудования 2.
На Фиг. 1 видно, что силовые линии от аварийного приводного механизма 11 и двигателя 4 сводятся вместе в совмещающей передаче 16 и поток силовых линий препровождается дальше на выходной вал 9.
На Фиг. 6 и 7 представлены два примера применяемой совмещающей передачи 16, каждый из которых представляет собой дифференциальную передачу.
Из Фиг. 6 и 7 видно, что выходной вал 9 и входной вал 10 описывают главный поток силовых линий через совмещающую передачу 16. В других примерах выполнения между совмещающей передачей 16 и выходным валом 9 или входным валом 10 могут быть включены другие передачи.
Во всяком случае видно, что передаточное отношение между выходным валом 9 и входным валом 10 составляет 1:1.
На планетарной опоре 17 расположены планетарные колеса 18, которые создают сцепление между входным валом 10 и выходным валом 9.
Если планетарная опора 17 блокируется, то получается непосредственная передача между выходным валом 9 и входным валом 10. При этом направление вращения меняется.
Аварийный приводной механизм 11 входит в зацепление с планетарной опорой 17 с помощью зубчатого колеса 34 и двигает ее.
Таким образом, крутящий момент, внесенный через входной вал 10 в точку входа 29, можно суммировать с крутящим моментом, внесенным через планетарную опору 17 от аварийного приводного механизма 11 в точку входа 29.
Пример выполнения согласно Фиг. 6 демонстрирует дифференциальную передачу с коническими зубчатыми колесами, тогда как пример выполнения согласно Фиг. 7 - дифференциальную передачу с цилиндрическими колесами. Выгодным образом можно применять также и другие типы дифференциальных механизмов, например планетарные передачи.
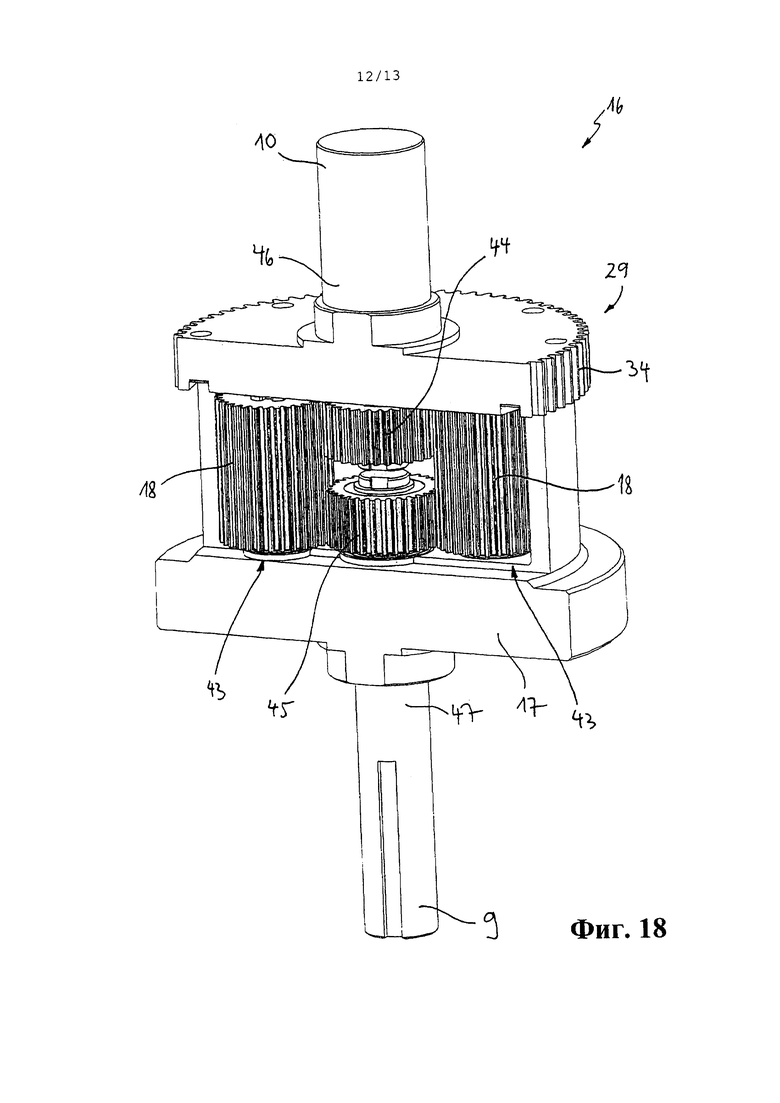
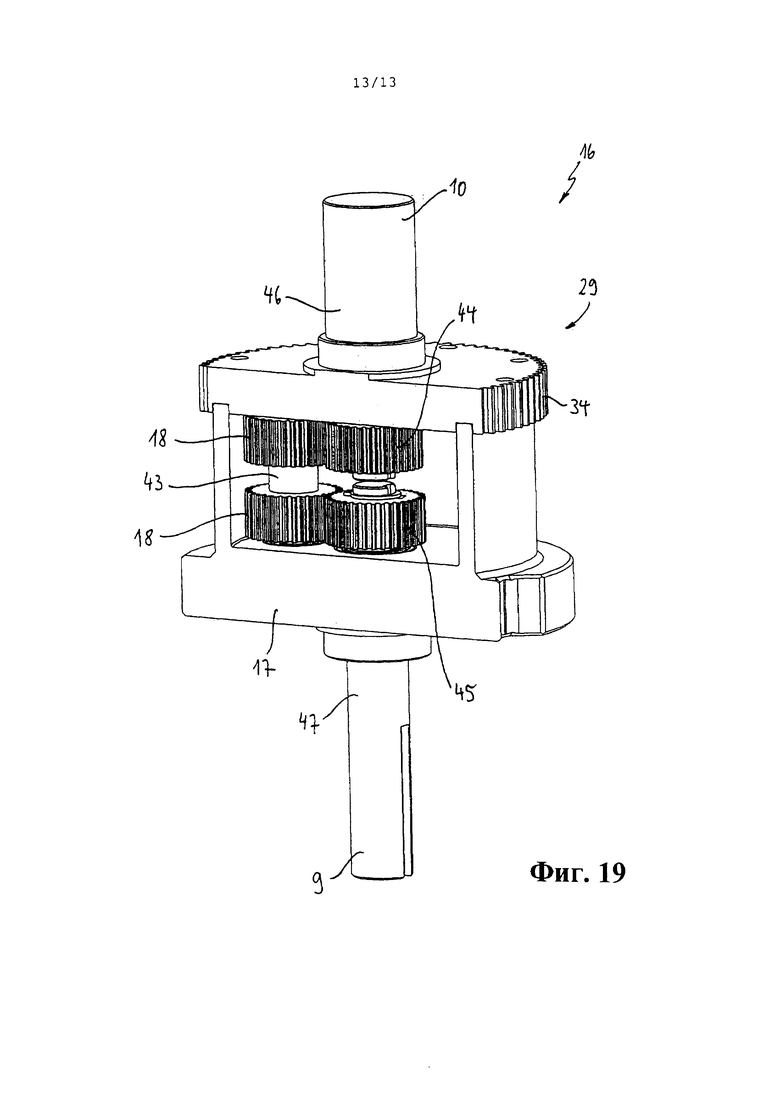
На Фиг. 18 представлена другая совмещающая передача 16, как она может применяться и/или применяется в заявленном запирающем устройстве для оборудования 8 показанной и/или описанной исполнительной системы для оборудования 1.
Совмещающая передача 16 в этом случае выполнена как планетарная передача и имеет планетарную опору 17 (здесь в виде водила планетарной передачи), которая держит планетарные колеса 18 (здесь выполненные в виде планерных зубчатых колес). Планетарные колеса 18 образуют каждый раз планетарный комплект 43.
Совмещающая передача 16 имеет первое солнечное колесо 44 и второе солнечное колесо 45, которые расположены коаксиально друг к другу.
Первое солнечное колесо 44 соединено с входным валом 46 совмещающей передачи 16 без возможности поворота. Второе солнечное колесо 45 соединено с выходным валом 47 совмещающей передачи 16 без возможности поворота.
Входной вал 46 совмещающей передачи 16 переходит во входной вал 10 запирающего устройства для оборудования 8 или жестко соединен с ним.
Выходной вал 47 совмещающей передачи 16 переходит в выходной вал 9 запирающего устройства для оборудования 8 или жестко соединен с ним.
Солнечные колеса 44, 45 находятся в зацеплении соответственно с планетарными зубчатыми колесами 18 планетарного комплекта 43. В результате создается поток силовых линий между входным валом 46 и выходным валом 47.
Число зубьев солнечных колес 44, 45 отличается друг от друга незначительно, так что передаточное отношение между входным валом 46 и выходным валом 47 составляет почти единицу, но не точно единицу, когда планетарная опора 17 зафиксирована.
При этом профили зубьев, в частности, коррекции зубьев солнечных колес 44, 45 выбирают разными, так что полюсы зацепления с планетарными колесами 18 одинаковы для обоих солнечных колес 44, 45. Планетарные колеса 18 являются монолитными и имеют, соответственно, одинаковое число зубьев.
Таким образом, образована четырехколесная планетарная передача в виде планетарного механизма описанного типа.
На Фиг. 19 в упрощенном виде представлена базовая конструкция совмещающей передачи 16 согласно Фиг. 18 для наглядного пояснения потока силовых линий и принципа действия в виде четырехколесного планетарного механизма. Другие элементы зацепления на Фиг. 18 предусмотрены лишь для подкрепления и для пояснения самого принципа работы не нужны. Видно, что планетарный комплект 43 можно выполнить секционированным, так чтобы солнечные колеса 44, 45 образовывали с двумя планетарными колесами 18 планетарного комплекта 43 базовую конструкцию четырехколесного планетарного механизма. В общем, формы выполнения из пояснений к Фиг. 18 относятся и к Фиг. 19.
В других примерах выполнения каждый планетарный комплект 43 имеет два отдельных планетарных колеса, которые соединены на общей оси без возможности поворота и каждое из которых находится в зацеплении только с одним из двух солнечных колес 44, 45, как это показано в качестве примера на Фиг. 19.
В этом типе совмещающей передачи 16 согласно Фиг. 18 применяют зачастую ровно столько планетарных комплектов 43, сколько составляет разница в количестве зубьев солнечных колес 44, 45.
В примере выполнения согласно Фиг. 18 разница в количестве зубьев равна двум, и имеется точно два планетарных комплекта 43.
Аварийный приводной механизм 11 соединен с помощью зубчатого колеса 34 с планетарной опорой 17. В результате передаточное отношение между зубчатым колесом 34 и выходным валом 47 составляет 10 или более 10. В примере выполнения передаточное отношение между входным валом 46 и выходным валом 47 составляет при неподвижном зубчатом колесе как раз 1.1, а передаточное отношение между зубчатым колесом 34 и выходным валом 47 составляет при неподвижном входном вале 46 точно 10. В другом примере выполнения передаточное отношение между входным валом 46 и выходным валом 47 составляет при неподвижном зубчатом колесе 34 именно 1.066, а передаточное отношение между зубчатым колесом 34 и выходным валом 47 составляет при неподвижном входном вале 46 точно 15. Другие числовые значения можно также реализовать путем выбора числа зубьев.
Совмещающая передача 16 совмещает, таким образом, вращательные движения на входном валу 46 и на зубчатом колесе 34 для получения вращательного движения на выходном валу 47. Крутящие моменты при этом суммируются.
Можно видеть, что в отличие от других похожих систем согласно Фиг. 7 вращательное движение между входным валом 46 и выходным валом 47 не будет инверсивным, а будет передаваться в одном направлении.
В общем, пояснения к фигурам 6 и 7 относятся соответствующим образом к примеру выполнения согласно Фиг. 18 и Фиг. 19.
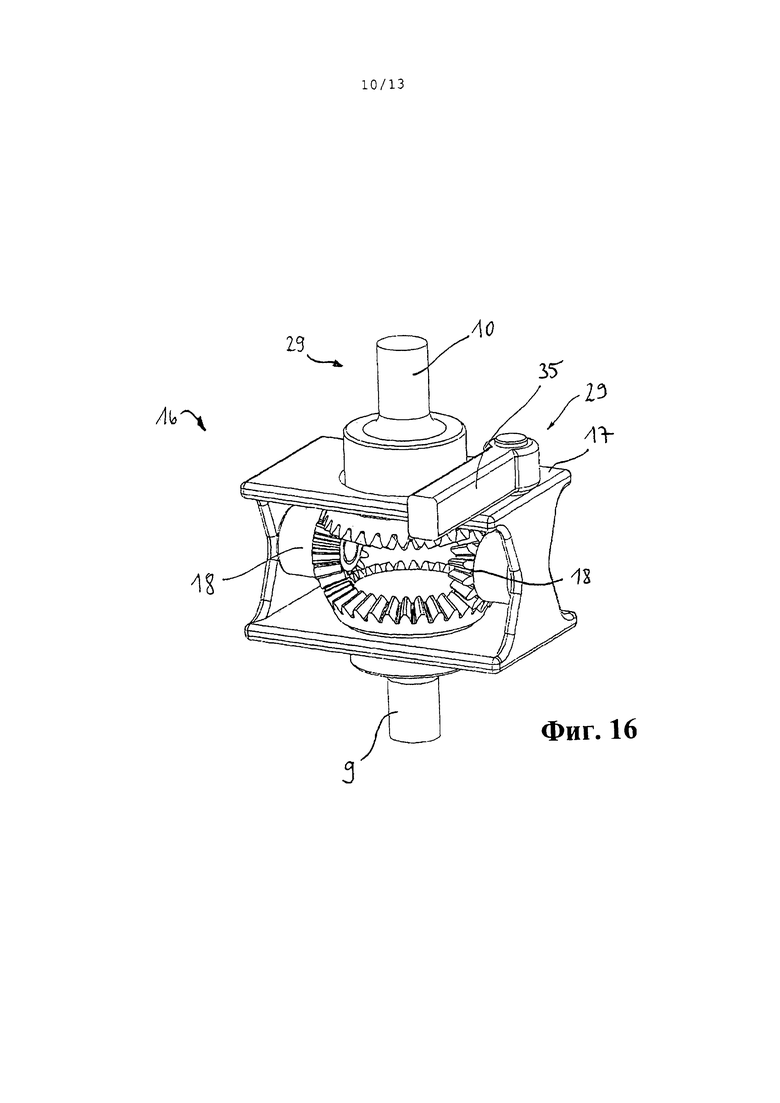
В другом примере выполнения согласно Фиг. 16 аварийный приводной механизм 11 входит в зацепление не с зубчатым колесом, а с элементом привода 35, здесь, например, с шатуном или кривошипно-шатунным или рычажно-подъемным механизмом. Благодаря тому, что между входным валом 10 и выходным валом 9 передаточное отношение составляет 1:1, при зафиксированном входном вале 10 получается передаточное отношение 1:2 между точкой входа 29 аварийного приводного механизма 11 и выходным валом 9. И поэтому, например, поворот на 90° планетарной опоры 17 с помощью элемента привода 35 при неподвижном входном вале 10 способствует повороту на 180° выходного вала 9. Этого перемещения уже достаточно для многих случаев применения.
В общем, для Фиг. 16 подходят выполнения для Фиг. 1-6.
На Фиг. 1, кроме того, видно, что запирающее устройство для оборудования 8 имеет фиксирующее устройство 19.
С помощью фиксирующего устройства 19 можно блокировать аварийный приводной механизм 11 при работе с питанием от сети и освобождать его при исчезновении напряжения сети.
Для этого фиксирующее устройство 19 имеет самотормозящуюся передачу 20, которая блокирует поток силовых линий в его направленности от совмещающей передачи 16 к аварийному приводному механизму 11.
При этом аварийный приводной механизм 11 натягивается не с помощью двигателя 4, а с помощью отдельного натяжного устройства 15.
Если нет самотормозящейся передачи 20, то на аварийный приводной механизм 11 можно воздействовать с помощью совмещающей передачи 16, например, при неподвижном выходном вале 9.
Альтернативно или дополнительно к самотормозящейся передаче 20 фиксирующее устройство 19 имеет защелку 21, которая в фиксирующем положении взаимодействует с элементом передачи 22 с блокировкой.
Для этого защелка 21 входит в соответствующую выемку 23 на элементе передачи 22. Защелка 21 фиксирует, таким образом, в обоих направлениях - к аварийному приводному механизму 11 и от него.
Элемент передачи 22 при освобождении фиксирующего устройства 19 приводится в действие с помощью аварийного приводного механизма 11. Защелка 21 блокирует, таким образом, в сцепленном положении аварийный приводной механизм 11.
На Фиг. 1 показано, что защелка может воздействовать на аварийный приводной механизм 11, самотормозящуюся передачу 20 или совмещающую передачу 16 для блокировки. В других примерах выполнения и другие элементы передачи 22 других приспособлений запирающего устройства для оборудования 8 так же могут фиксироваться с защелкой 21. Например, элемент передачи 22 может быть выполнен на планетарной опоре 17.
На Фиг. 5 показан поток силовых линий при заблокированном аварийном приводном механизме 11.
Таким образом, показан поток силовых линий в нормальном режиме работы от двигателя 4 к приводному валу 9. Знаком «х» обозначен прерванный поток силовых линий в результате блокирования.
Фиксирующее устройство 19 имеет выключающий расцепляющий механизм 24, с помощью которого защелка 21 может выходить из выемки 23 элемента передачи 22.
На Фиг. 8 и Фиг. 9 представлен пример выполнения, в котором защелка 21 может выходить и входить в результате прямого линейного перемещения.
Выключающий расцепляющий механизм 24 выполнен при этом как подъемный электромагнит, приводимый в действие с помощью электрической силы. Подъемный электромагнит может иметь саму по себе известную возвратную пружину, которая далее подробно не представлена.
На Фиг. 10-12 показано альтернативное фиксирующее устройство 19 для применения в исполнительной системе для оборудования 1 согласно Фиг. 1.
Можно видеть, что защелка 21 выполнена на свободном конце коленчатого рычага 25.
На Фиг. 10 показано вытянутое положение коленчатого рычага 25, тогда как на Фиг. 11 представлено изогнутое положение коленчатого рычага 25. Изогнутое положение коленчатого рычага 25 определяет, тем самым, освобождающее положение фиксирующего устройства 19.
На Фиг. 12 видно, что коленчатый рычаг 25 имеет шарнир 26, на который воздействует выключающий расцепляющий механизм 24, здесь подъемный электромагнит. Таким образом, коленчатый рычаг 25 состоит из двух колен 30, 31, соединенных между собой шарниром 26. Отдаленный от шарнира 26 конец одного колена 30 выполнен как свободный конец, образующий защелку 21. На отдаленном от шарнира 26 конце 33 другого колена 31 коленчатый рычаг соединен шарниром.
Выключающий расцепляющий механизм 24 действует, тем самым, в поперечном направлении относительно направленности вытянутого коленчатого рычага 25 (ср. Фиг. 10). Вытянутый рычаг 25 определяет зафиксированное положение фиксирующего устройства.
Благодаря применению коленчатого рычага 25 можно добиться того, чтобы к началу движения расцепления можно было приложить к защелке 21 большую силу, так как передаточное отношение силы от выключающего расцепляющего механизма 24 к защелке 21 при вытянутом коленчатом рычаге 25 очень оптимально.
Таким образом, можно преодолеть большие удерживающие усилия, оказываемые на защелку 21, которые вызваны натяжением элемента привода 22.
На Фиг. 13 представлена другая исполнительная система для оборудования 1 согласно изобретению.
Функционально и/или конструктивно относительно описанных выше примеров выполнения одинаковые или похожие элементы и функциональные узлы обозначены теми же позициями и еще раз отдельно не описываются. Формы выполнения на Фиг. 1-12 относятся соответственно и к Фиг. 13.
Исполнительная система для оборудования 1 согласно Фиг. 13 отличается от исполнительной системы для оборудования 1 согласно Фиг. 1 тем, что заявленное запирающее устройство для оборудования 8 встроено в сервопривод 2, т.е. в его корпус 27.
В этом заключается, например, то преимущество, что передача 7 и выходная часть механизма 5 могут отсутствовать в отличие от Фиг. 1.
Также в примере выполнения согласно Фиг. 13 указанное оборудование 3 для создания кинематической связи или приводной связи можно присоединить к выходному валу 9 с возможностью разъединения.
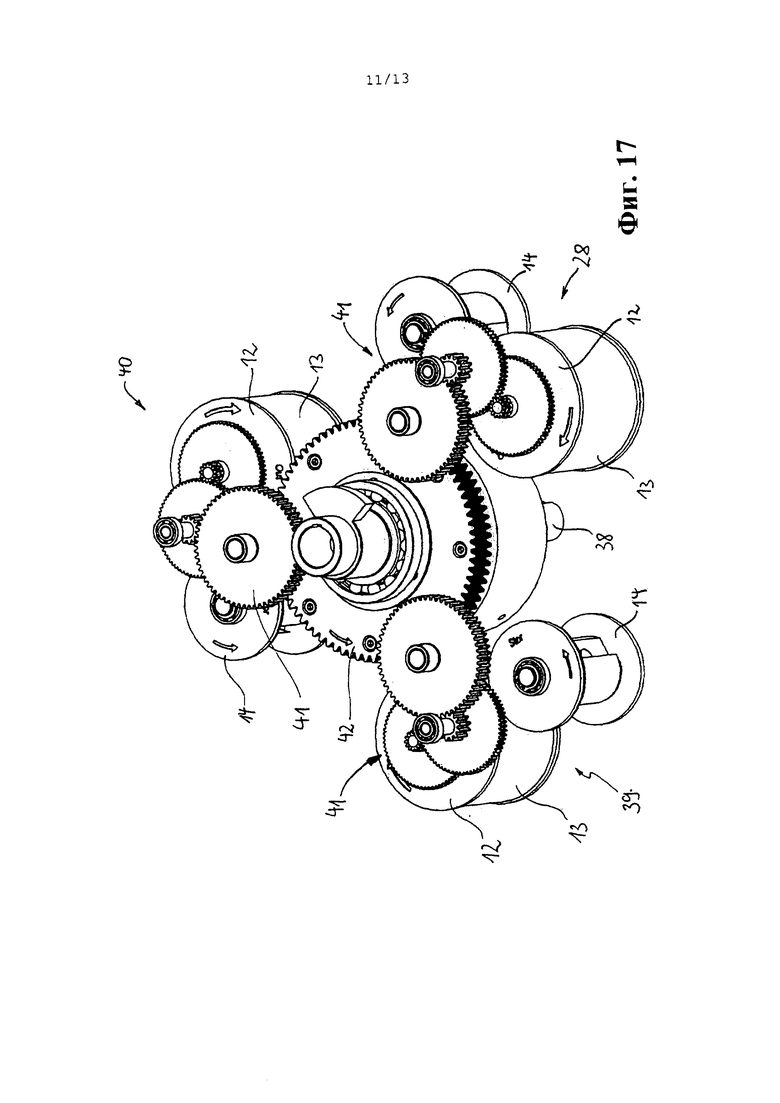
На Фиг. 17 показан другой аварийный приводной механизм 11 заявленного запирающего устройства для оборудования 8, причем подробности, которые не нужны для раскрытия изобретения, оставлены без внимания.
Аварийный приводной механизм 11 имеет приводной вал 38, который также можно видеть на описанных выше фигурах. Этот приводной вал 38 соединен с зубчатым элементом 42.
С зубчатым элементом 42 входят в зацепление по окружности три равномерно распределенных двигателя с роликовой пружиной 28, 39, 40.
В других примерах выполнения входит в зацепление другое количество двигателей с роликовой пружиной.
Двигатели с роликовой пружиной 28, 39, 40 приводят в движение общий зубчатый элемент 42, так что отдельные крутящие моменты двигателей с роликовой пружиной 28, 39, 40 суммируются.
Таким образом, двигатели с роликовой пружиной 28, 39, 40 включены параллельно друг другу. Каждый из двигателей с роликовой пружиной 28, 39, 40 прикладывает, соответственно, треть всего необходимого крутящего момента.
Каждый двигатель с роликовой пружиной 28, 39, 40 находится в приводной связи с зубчатым элементом 42 с помощью передачи 41, здесь с помощью многоступенчатой понижающей передачи для перевода на малый ход.
В общем, функция каждого из двигателей с роликовой пружиной 28, 39, 40 та же, что и описывалась ранее. Поэтому формы выполнения относятся, соответственно, и к Фиг. 17, причем были сохранены те же номера позиций.
В запирающем устройстве для оборудования 8 с выходным валом 9 для присоединения оборудования 3 и входным валом 10 для присоединения сервопривода 2 предлагается выполнить аварийный приводной механизм 11 для приведение в движение выходного вала 9 при исчезновении напряжения сети в виде двигателя с роликовой пружиной 28 и/или поток силовых линий от аварийного приводного механизма 11 к выходному валу 9 совмещать с потоком силовых линий от входного вала 10 к выходному валу 9 с помощью совмещающей передачи 16 и/или аварийный приводной механизм 11 блокировать и освобождать с помощью фиксирующего устройства 19.
Группа изобретений относится к запирающему устройству для оборудования и исполнительной системе для оборудования. Запирающее устройство, включающее выходной вал и входной вал, который соединен с выходным валом и приводит в движение выходной вал в нормальном режиме работы, и аварийный приводной механизм. Причем выходной вал дополнительно выполнен с возможностью перевода из рабочего положения в конечное положение с помощью аварийного приводного механизма. Аварийный приводной механизм выполнен как один двигатель с роликовой пружиной. Причем один двигатель с роликовой пружиной имеет один пружинный элемент в виде ленты, а также один пружинный элемент в виде ленты намотан в состоянии ослабленного натяжения в виде спирали и для натяжения одного двигателя с роликовой пружиной выполнен с возможностью обмотки дополнительного ролика из намотки в виде спирали в состоянии ослабленного натяжения. Аварийный приводной механизм соединен с выходным валом с помощью совмещающей передачи, и входной вал, и выходной вал соединены с помощью совмещающей передачи. Техническим результатом является снижение требований при выборе размеров для исполнительной системы для оборудования. 4 н. и 25 з.п. ф-лы, 19 ил.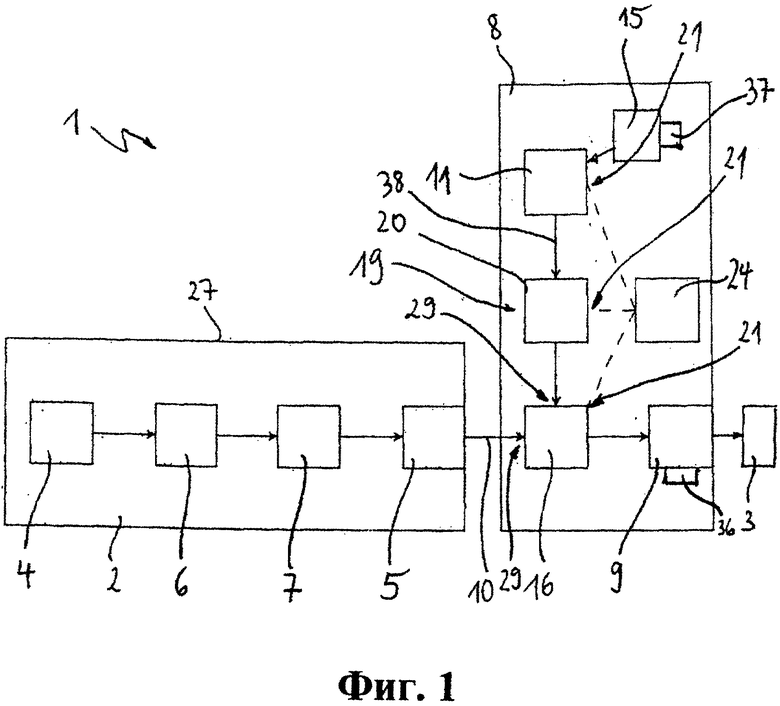
1. Запирающее устройство для оборудования, включающее выходной вал (9) и входной вал (10), который соединен с выходным валом (9) и приводит в движение выходной вал (9) в нормальном режиме работы, и аварийный приводной механизм (11), причем выходной вал (9) дополнительно выполнен с возможностью перевода из рабочего положения в конечное положение с помощью аварийного приводного механизма (11), отличающееся тем, что аварийный приводной механизм (11) выполнен как, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40), причем, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40) имеет, по меньшей мере, один пружинный элемент в виде ленты (13), причем, по меньшей мере, один пружинный элемент в виде ленты (13) намотан в состоянии ослабленного натяжения в виде спирали и для натяжения, по меньшей мере, одного двигателя с роликовой пружиной (28, 39, 40) выполнен с возможностью обмотки, по меньшей мере, одногодополнительного ролика (14) из намотки в виде спирали в состоянии ослабленного натяжения,
причем аварийный приводной механизм (11) соединен с выходным валом (9) с помощью совмещающей передачи (16), и
причем входной вал (10) и выходной вал (9) соединены с помощью совмещающей передачи (16).
2. Запирающее устройство для оборудования по п. 1, отличающееся тем, что, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40) выполнен с возможностью натяжения с помощью входного вала (10) и/или, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40) выполнен с возможностью натяжения с помощью натяжного устройства (15), приводимого в действие преимущественно электродвижущей силой.
3. Запирающее устройство для оборудования (8) по п. 1, отличающееся тем, что, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40) имеет, по меньшей мере, два или более двух пружинных элементов (13).
4. Запирающее устройство для оборудования по п. 3, отличающееся тем, что двигатель с роликовой пружиной (28, 39, 40) выполнен с возможностью натяжения путем разматывания, по меньшей мере, одного пружинного элемента (13) и/или в натянутом состоянии пружинный элемент (13), по меньшей мере, одного двигателя с роликовой пружиной (28, 39, 40) намотан против преимущественного направления намотки.
5. Запирающее устройство для оборудования по п. 1, отличающееся тем, что аварийный приводной механизм (11) имеет, по меньшей мере, два параллельно включенных двигателя с роликовой пружиной (28, 39, 40) и/или, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40) приводит в движение выходной вал (9) с помощью передачи (41), в частности преимущественно многоступенчатой понижающей передачи.
6. Запирающее устройство для оборудования по п. 1, отличающееся тем, что входной вал (10) и выходной вал (9) соединены с помощью совмещающей передачи (16) и/или аварийный приводной механизм (11) приводит в действие планетарную опору (17) совмещающей передачи (16).
7. Запирающее устройство для оборудования по п. 1, отличающееся тем, что имеется регулировочное устройство (37), предназначенное для регулирования натяжного устройства (15) аварийного приводного механизма (11) таким образом, что вращательное движение входного вала (10) компенсируемо таким образом, что сохраняется желаемое вращательное движение, в частности, останов выходного вала (9) при натяжении аварийного приводного механизма (11) и/или имеется датчик (36), связанный предпочтительно с регулировочным устройством (37) и предназначенный для детектирования вращательного движения выходного вала (9).
8. Запирающее устройство для оборудования по одному из пп. 1-7, отличающееся тем, что оно имеет фиксирующее устройство (19), выполненное как самотормозящаяся передача (20), приводимая в действие аварийным приводным механизмом (11), и/или фиксирующее устройство (19) имеет защелку (21), выполненную с возможностью перемещения между фиксирующим положением и свободным положением, причем защелка в фиксирующем положении взаимодействует с элементом передачи (22), приводимым в действие аварийным приводным механизмом (11).
9. Запирающее устройство для оборудования по п. 8, отличающееся тем, что элемент привода (22) представляет собой планетарную опору (17) совмещающей передачи (16) и/или для перевода защелки (21) в свободное положение имеется выключающий расцепляющий механизм (24), приводимый в действие преимущественно двигателем.
10. Запирающее устройство для оборудования по п. 9, отличающееся тем, что выключающий расцепляющий механизм (24) защелки (21) фиксирующего устройства (19) выполнен в виде подъемного электромагнита.
11. Запирающее устройство для оборудования по п. 10, отличающееся тем, что защелка (21) выполнена на свободном конце коленчатого рычага (25) и/или выключающий расцепляющий механизм (24) защелки (21) фиксирующего устройства (19) воздействует на шарнир (26) коленчатого рычага (25) преимущественно в поперечном направлении относительно направленности вытянутого коленчатого рычага (25).
12. Запирающее устройство для оборудования, включающее выходной вал (9) и соединенный с выходным валом (9) входной вал (10), посредством которого выходной вал (9) приводим в движение в нормальном режиме работы, и аварийный приводной механизм (11), причем выходной вал (9) дополнительно выполнен с возможностью перевода из рабочего положения в конечное положение с помощью аварийного приводного механизма (11), отличающееся тем, что аварийный приводной механизм (11) выполнен как, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40) и соединен с выходным валом (9) с помощью совмещающей передачи (16), в частности дифференциальной передачи или планетарной передачи, причем, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40) имеет, по меньшей мере, один пружинный элемент в виде ленты (13), причем, по меньшей мере, один пружинный элемент в виде ленты (13) намотан в состоянии ослабленного натяжения в виде спирали и для натяжения по меньшей мере одного двигателя с роликовой пружиной (28, 39, 40) выполнен с возможностью обмотки, по меньшей мере, одногодополнительного ролика (14) из намотки в виде спирали в состоянии ослабленного натяжения,
причем аварийный приводной механизм (11) соединен с выходным валом (9) с помощью совмещающей передачи (16),
причем входной вал (10) и выходной вал (9) соединены между собой с помощью совмещающей передачи (16).
13. Запирающее устройство для оборудования по п. 12, отличающееся тем, что, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40) выполнен с возможностью натяжения с помощью входного вала (10) и/или, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40) выполнен с возможностью натяжения с помощью натяжного устройства (15), приводимого в действие с помощью преимущественно электродвижущей силы.
14. Запирающее устройство для оборудования по п. 12, отличающееся тем, что, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40) имеет, по меньшей мере, два или более двух пружинных элементов (13).
15. Запирающее устройство для оборудования по п. 14, отличающееся тем, что двигатель с роликовой пружиной (28, 39, 40) выполнен с возможностью натяжения путем разматывания, по меньшей мере, одного пружинного элемента (13) и/или в натянутом состоянии пружинный элемент (13), по меньшей мере, одного двигателя с роликовой пружиной (28, 39, 40) намотан против преимущественного направления намотки.
16. Запирающее устройство для оборудования по п. 12, отличающееся тем, что аварийный приводной механизм (11) имеет, по меньшей мере, два параллельно включенных двигателя с роликовой пружиной (28, 39, 40) и/или, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40) приводит в движение выходной вал (9) с помощью передачи (41), в частности, преимущественно многоступенчатой понижающей передачи.
17. Запирающее устройство для оборудования по п. 12, отличающееся тем, что входной вал (10) и выходной вал (9) соединены с помощью совмещающей передачи (16) и/или аварийный приводной механизм (11) приводит в движение планетарную опору (17) совмещающей передачи (16).
18. Запирающее устройство для оборудования по одному из пп. 12-17, отличающееся тем, что имеется регулировочное устройство (37), предназначенное для регулирования натяжного устройства (15) аварийного приводного механизма (11) таким образом, что вращательное движение входного вала (10) компенсируется таким образом, что сохраняется желаемое вращательное движение, в частности, останов выходного вала (9) при натяжении аварийного приводного механизма (11) и/или имеется датчик (36), связанный предпочтительно с регулировочным устройством (37) и предназначенный для детектирования вращательного движения выходного вала (9).
19. Запирающее устройство для оборудования, включающее выходной вал (9) и соединенный с выходным валом (9) входной вал (10), посредством которого выходной вал (9) приводим в движение в нормальном режиме работы, и аварийный приводной механизм (11), причем выходной вал (9) дополнительно выполнен с возможностью перевода из рабочего положения в конечное положение с помощью аварийного приводного механизма (11), отличающееся тем, что аварийный приводной механизм (11) выполнен как, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40), и имеется фиксирующее устройство (19) для блокирования аварийного приводного механизма (11) при работе с питанием от сети и/или для освобождения аварийного приводного механизма при исчезновении напряжения сети, причем, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40) имеет, по меньшей мере, один пружинный элемент в виде ленты (13), причем, по меньшей мере, один пружинный элемент в виде ленты (13) намотан в состоянии ослабленного натяжения в виде спирали и выполнен с возможностью обмотки дополнительного ролика (14) для натяжения, по меньшей мере, одного двигателя с роликовой пружиной (28, 39, 40) намотки в виде спирали в состоянии ослабленного натяжения,
причем аварийный приводной механизм (11) соединен с выходным валом (9) с помощью совмещающей передачи (16),
причем входной вал (10) и выходной вал (9) соединены между собой с помощью совмещающей передачи (16).
20. Запирающее устройство для оборудования по п. 19, отличающееся тем, что, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40) выполнен с возможностью натяжения с помощью входного вала (10) и/или, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40) выполнен с возможностью натяжения с помощью натяжного устройства (15), приводимого в действие преимущественно электродвижущей силой.
21. Запирающее устройство для оборудования по п. 19, отличающееся тем, что, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40) имеет, по меньшей мере, два или более двух пружинных элементов (13).
22. Запирающее устройство для оборудования по п. 21, отличающееся тем, что двигатель с роликовой пружиной (28, 39, 40) выполнен с возможностью натяжения путем разматывания, по меньшей мере, одного пружинного элемента (13) и/или в натянутом состоянии пружинный элемент (13), по меньшей мере, одного двигателя с роликовой пружиной (28, 39, 40) намотан против преимущественного направления намотки.
23. Запирающее устройство для оборудования по п. 19, отличающееся тем, что аварийный приводной механизм (11) имеет, по меньшей мере, два параллельно включенных двигателя с роликовой пружиной (28, 39, 40) и/или, по меньшей мере, один двигатель с роликовой пружиной (28, 39, 40) приводит в движение выходной вал (9) с помощью передачи (41), в частности, преимущественно многоступенчатой понижающей передачи.
24. Запирающее устройство для оборудования по одному из пп. 19-23, отличающееся тем, что фиксирующее устройство (19) выполнено как самотормозящаяся передача (20), приводимая в действие аварийным приводным механизмом (11), и/или фиксирующее устройство (19) имеет защелку (21), выполненную с возможностью перемещения между фиксирующим положением и свободным положением, причем защелка в фиксирующем положении взаимодействует с элементом передачи (22), приводимым в действие аварийным приводным механизмом (11).
25. Запирающее устройство для оборудования по п. 24, отличающееся тем, что элемент привода (22) представляет собой планетарную опору (17) совмещающей передачи (16) и/или для перевода защелки (21) в свободное положение имеется выключающий расцепляющий механизм (24), приводимый в действие преимущественно двигателем.
26. Запирающее устройство для оборудования по п. 25, отличающееся тем, что выключающий расцепляющий механизм (24) защелки (21) фиксирующего устройства (19) выполнен в виде подъемного электромагнита.
27. Запирающее устройство для оборудования по п. 25, отличающееся тем, что защелка (21) выполнена на свободном конце коленчатого рычага (25) и/или выключающий расцепляющий механизм (24) защелки (21) фиксирующего устройства (19) воздействует на шарнир (26) коленчатого рычага (25) преимущественно в поперечном направлении относительно направленности вытянутого коленчатого рычага (25).
28. Исполнительная система для оборудования, включающая сервопривод (2) для приведения в действие при работе с питанием от сети выходного вала (9), соединяемого или соединенного с оборудованием (3), и запирающее устройство для оборудования (8) для приведения в действие выходного вала (9) при исчезновении напряжения сети, отличающаяся тем, что запирающее устройство для оборудования (8) выполнено по одному из пп. 1-27.
29. Исполнительная система для оборудования (1) по п. 28, отличающаяся тем, что запирающее устройство для оборудования (8) встроено в сервопривод (2) или объединено с сервоприводом (2) в виде отдельного узла с возможностью их разъединения и/или к выходному валу (9) подсоединено оборудование (3) для создания кинематической связи.
| ЦИФРОАНАЛОГОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ГИДРАВЛИЧЕСКОГО ПРИВОДА | 2005 |
|
RU2313698C2 |
| DE 19519638 A1, 05.12.1996 | |||
| US 4669578 A, 02.06.1987 | |||
| РЕГУЛЯТОР ДАВЛЕНИЯ ГАЗА НЕПРЯМОГО ДЕЙСТВИЯ МНОГОФУНКЦИОНАЛЬНЫЙ | 2003 |
|
RU2252445C2 |
| РЕЗЕРВИРОВАННЫЙ ЗАПОРНЫЙ МАГИСТРАЛЬНЫЙ ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ КЛАПАН МОДУЛЬНОГО ИСПОЛНЕНИЯ ДЛЯ ВСТРОЕННОГО МОНТАЖА, ВЫСОКИХ ДАВЛЕНИЙ И ТЕМПЕРАТУР | 2007 |
|
RU2350813C1 |
| US 4921208 A, 01.05.1990. | |||

