Изобретение относится к ступени передачи, в частности сиденья автомобиля, которая имеет признаки ограничительной части п.1 формулы.
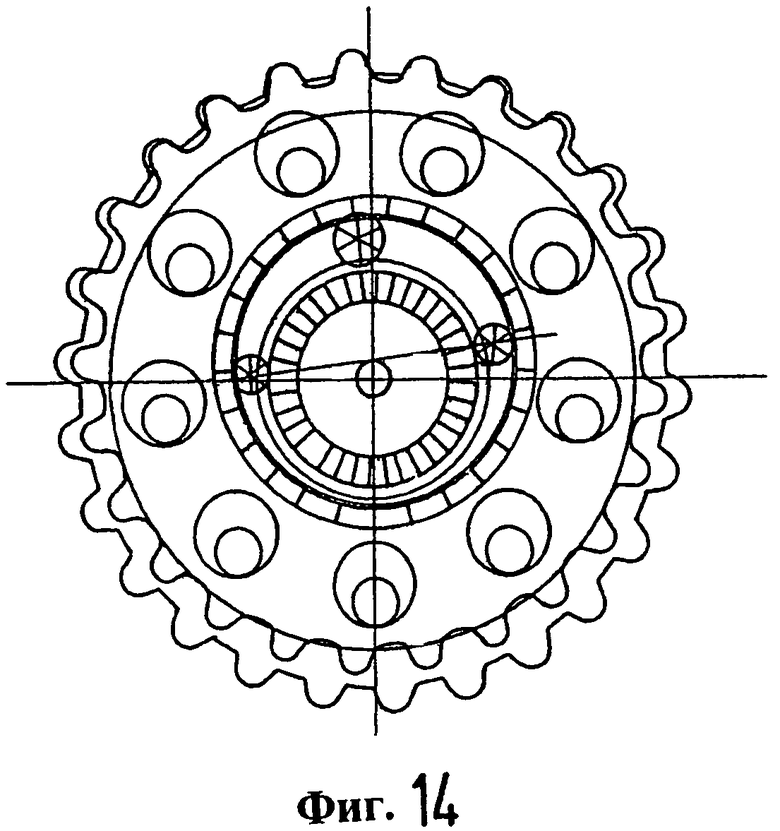
В электрических сервоприводах для регулятора положения сиденья известны ступени передачи, которые выполнены в виде ступени эксцентрика качения и которые находят свое применение в качестве ступени промежуточной передачи или приводных механизмов для создания вращающегося эксцентриситета для зубчатых передаточных ступеней. Такая известная ступень передачи, служащая в качестве приводного механизма второй ступени передачи с вращающимся эксцентриситетом, представлена на фиг.14.
И хотя ожидаемые свойства таких ступеней эксцентрика качения, а точнее передаточное число в диапазоне от 1,5 до 7, при высоком коэффициенте полезного действия и незначительном уровне шума на практике достаточно хорошо реализованы, эта концепция имеет недостатки, которые можно компенсировать только с помощью сравнительно больших затрат. Эксцентриситет, который необходим для точного и равномерного обкатывания зубчатой малой шестерни в зубчатом колесе с внутренним зацеплением и величина которого должна, разумеется, оставаться, по возможности, постоянной, возникает в известных решениях за счет сочетания разных геометрий, например, у приводных шариков, которые на фиг.14 прижимают малую шестерню вверх, максимального ограничения этого движения - благодаря зубчатому зацеплению, пальцам ведомого элемента передачи в отверстиях шестерни или не показанному здесь упорному подшипнику между приводным механизмом и ведомым элементом передачи, а также минимальному ограничению, например, с помощью шаровой опоры. В результате относительно большое число образующих эксцентриситет конструктивных элементов за счет допусков, деформаций, зависящих от нагрузок, и внутренних напряжений создает, с точки зрения всех условий эксплуатации, действительно чувствительную и ненадежную систему, которую в условиях крупносерийного производства предположительно можно поднять на должный качественный уровень только с большими затратами.
В качестве другого принципиального недостатка следует назвать то, что такой эксцентрик качения можно хорошо и просто представить в виде приводного механизма, работающего в плоскости и с одной единственной малой шестерней на фиг.14, радиальные усилия должны восприниматься на опоре пропорционально общей оси отработки, однако непосредственно и полностью от роторного подшипника, вращающегося с высоким числом оборотов, и там при возрастающей нагрузке приводят к возрастанию мощности потерь и тем самым к снижению коэффициента полезного действия при повышенной эксплуатационной нагрузке. Если, напротив, известным образом в плоскостях расположены друг над другом две, а в идеальном случае три, малые шестерни, то радиальные усилия могут взаимно упираться - однако это невозможно в представленной форме выполнения с помощью простого расположения одинаковых ступеней друг над другом, так как даже минимальные геометрические отличия задействованных конструктивных элементов приводят к принципиально разным передаточным числам и тем самым при более длительной эксплуатации к смещению по фазе ступеней передачи друг относительно друга или при принудительной синхронности - к напряжениям, а затем и к потерям.
Задачей изобретения является улучшенное выполнение ступени передачи указанного типа.
Эта задача решается согласно изобретению с помощью ступени передачи, имеющей признаки п.1 формулы изобретения. Выгодные формы выполнения являются предметом зависимых пунктов формулы.
Приводной механизм и ведомый элемент передачи выполнены с возможностью вращения вокруг параллельных друг другу осей, которые смещены друг относительно друга на эксцентриситет. Приводной механизм и ведомый элемент передачи расположены в пространственном отношении друг в друге (соединены) и действуют с помощью обращенных друг к другу поверхностей. При этом приводной механизм можно расположить внутри ведомого элемента передачи (в этом случае приводной механизм действует с помощью своего внешнего контура, а ведомый элемент - с помощью своего внутреннего контура) или с точностью наоборот. Шарик или другое тело качения находится в клиновом зазоре, образованном по причине эксцентриситета между приводным механизмом и ведомым элементом, и способен двигаться, в частности продвигаться внутрь клинового зазора, и выдвигаться оттуда, причем это движение, как правило, происходит в плоскости перпендикулярно осям приводного механизма и ведомого элемента передачи.
Когда положение эксцентриситета относительно корпуса при этой первой, решающей для развития шумов ступени передачи неподвижно в пространстве, что преимущественно достигается за счет фиксированного, т.е. постоянного в пространстве, расположения приводного механизма и ведомого элемента передачи в одном общем корпусе, точки приложения силы постоянны в пространстве. С помощью этого предельно точного определения размера и направления эксцентриситета величина эксцентриситета во время вращения неизбежно остается точной, благодаря чему можно избежать периодических изменений соотношений нагрузок и развития шумов и вибраций по причине, в общем, стабильных антифрикционных свойств. С помощью такого устойчивого, с геометрической точки зрения, эксцентриситета между приводным механизмом и ведомым элементом передачи, точного, доступного расположения этих обоих конструктивных элементов друг относительно друга и использования шарика (или другого тела качения) в клиновом зазоре способствуют, во-первых, преобразованию при высоком коэффициенте полезного действия, а во-вторых, на ротор действует в качестве предварительного натяжения радиальная сила, пропорциональная соответствующему крутящему моменту, что при эксплуатации сводит к минимуму шумы.
Заявленная ступень передачи основывается на том же принципе, что и известная ступень передачи. Так можно регулировать передаточное отношение с помощью контуров на приводном механизме и/или ведомом элементе передачи, например, с помощью канавки, внутри которой бежит шарик. Заявленная ступень передачи улучшает свойства в отношении передаточного отношения, коэффициента полезного действия и бесшумности и предварительно натягивает желаемым образом ротор всегда в радиальном направлении, благодаря чему устраняются описанные недостатки, в частности исключается развитие шумов при электроприводах постоянного тока с роторами незначительной массы и незначительный коэффициент полезного действия высокоредуцирующей, одноступенчатой дифференцирующей передачи. Помимо основного принципа предлагается множество возможных дополнительных функций и дополнительных свойств, в частности различные возможности изменения передаточного числа и управления передаточным числом, а также простые решения для функций соединения, которые в общем контексте техники привода для сиденья могут привнести многочисленные выгоды. Для желаемого направления приведения в действие предусмотрено предпочтительно одно тело качения, например ролик, но также предпочтительно и шарик, для исключения статической неопределенности. Поскольку нужно только одно направление вращения приводного вала, необходим также только один единственный шарик или одно единственное тело качения.
Из патента FR 601.616 хотя и известна в принципе похожая на вид ступень передачи, однако тела качения распределены по всей окружности в виде планетарных элементов на стойке, которая при работе вращается, так что вращается и эксцентриситет.
Заявленная ступень передачи применяется преимущественно в сервоприводе для сиденья автомобиля, например, в регуляторе наклона спинки, регуляторе высоты или регуляторе наклона. Сервопривод включает в себя приводной двигатель и заявленную ступень передачи и активизирует, например, нагружаемый передаточный механизм, как это раскрыто в DE 102004019466 B4, который представляет собой элемент подвижной структуры сиденья. Сервопривод может иметь, при необходимости, еще и вторую ступень передачи или другие ступени передачи, которые приданы в дополнение к первой ступени передачи и предвключены нагружаемому передаточному механизму. Нагружаемый передаточный механизм может выполнять вращательное движение или линейное движение или совмещать эти движения. Сервопривод может быть выполнен также как исполнительное устройство или может приводить последнее в действие, например, вращать тросиковый барабан, который наматывает тросик для деблокирования. Возможно также применение не только для сиденья автомобиля, но, например, для стеклоподъемников и регулируемых зеркал.
Ниже изобретение описывается более подробно с помощью примера выполнения, представленного на чертеже, с дополнениями и вариациями.
Фиг.1: поперечное сечение первой ступени передачи, причем для наглядности обозначен только один шарик, а справа снаружи - изображение его радиальной нагрузки.
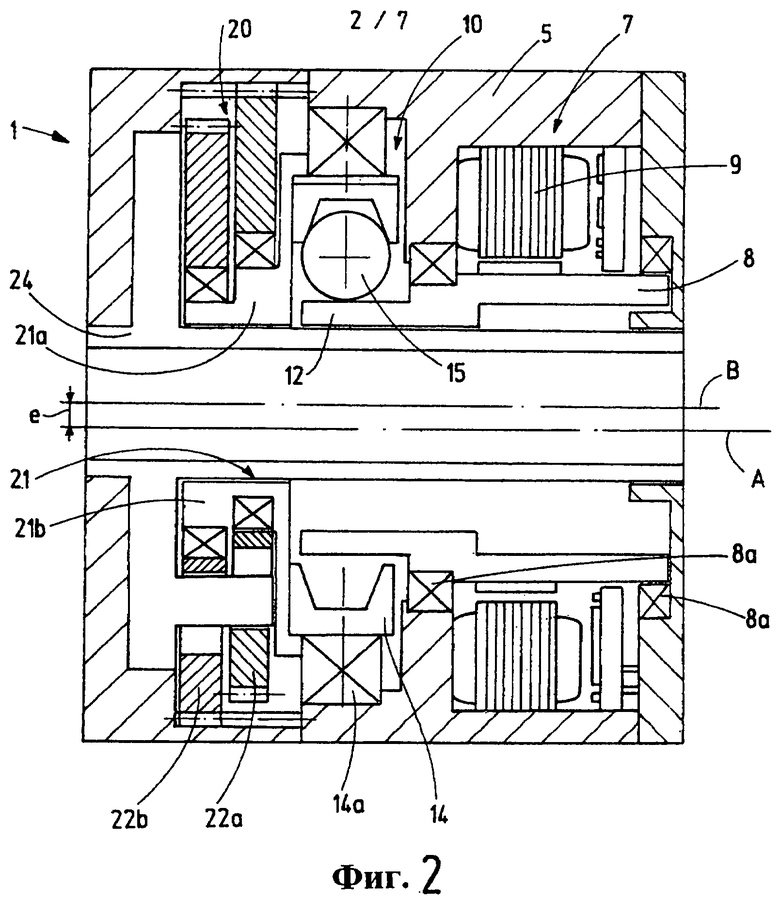
Фиг.2: продольное сечение сервопривода с приводным двигателем, первой ступенью передачи и второй ступенью передачи.
Фиг.3: продольное сечение втулки, служащей в качестве ведомого элемента первой ступени передачи и в качестве приводного механизма второй ступени передачи.
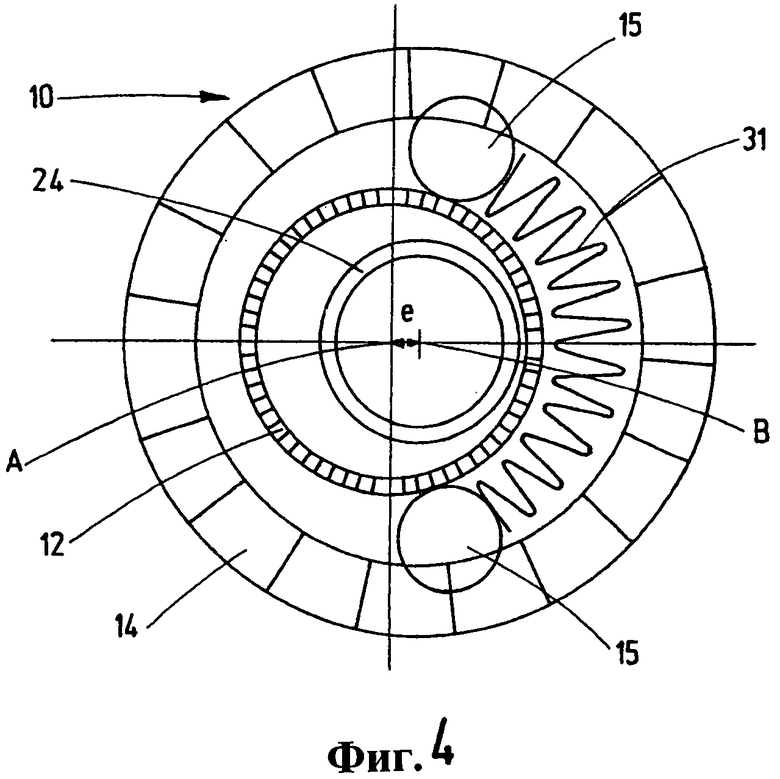
Фиг.4: поперечное сечение первой ступени передачи с пружиной сжатия в виде спирали в качестве прижимного элемента.
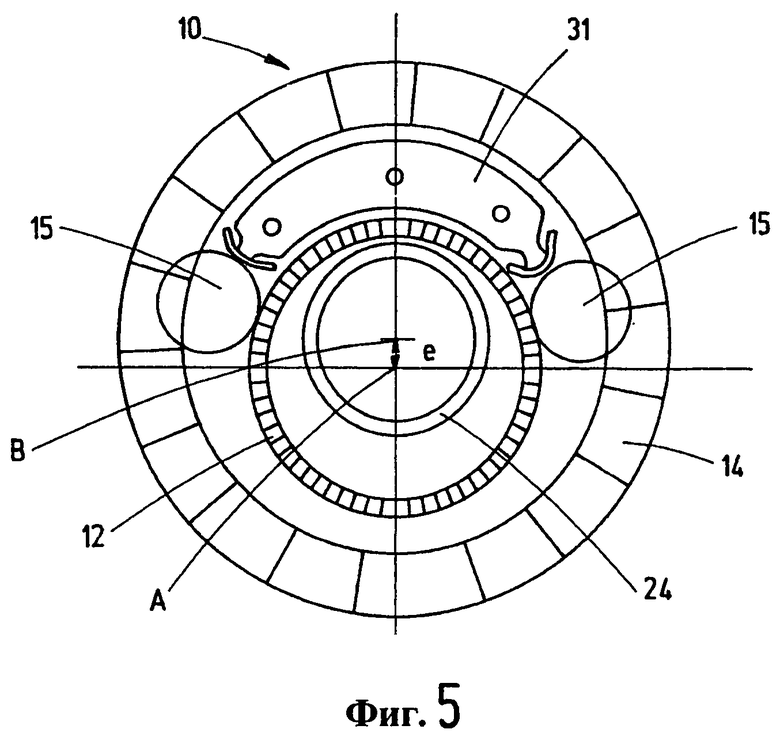
Фиг.5: поперечное сечение первой ступени передачи с плоской пружиной в качестве прижимного элемента.
Фиг.6: поперечное свечение первой ступени передачи с магнитами в качестве прижимных элементов.
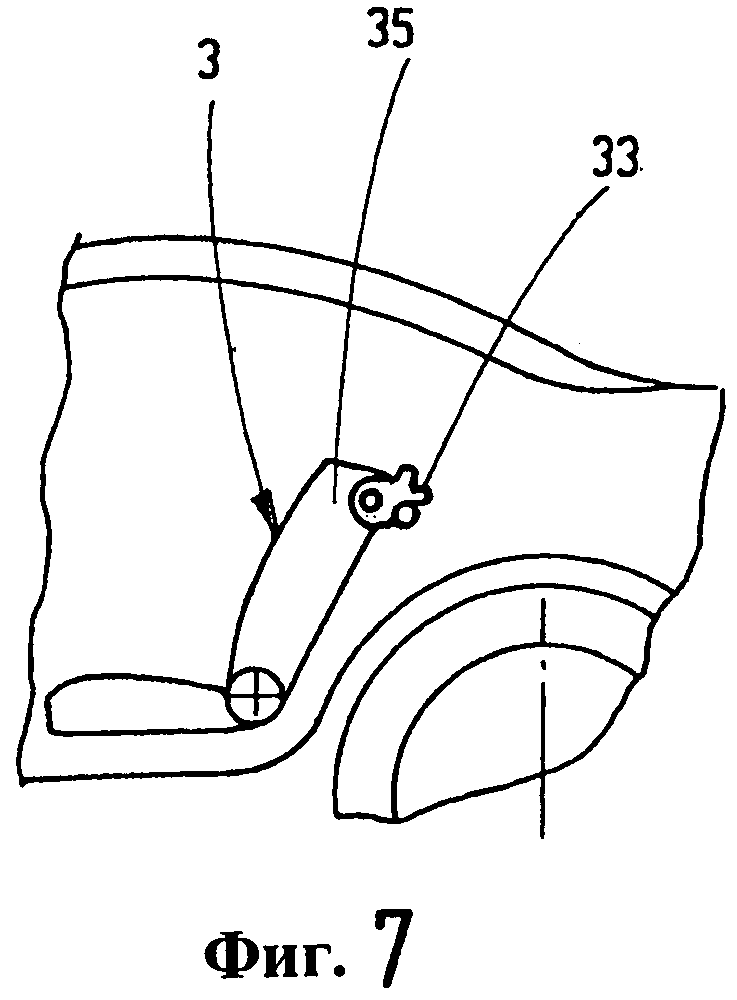
Фиг.7: схематичный вид сбоку сиденья автомобиля в заднем ряду.
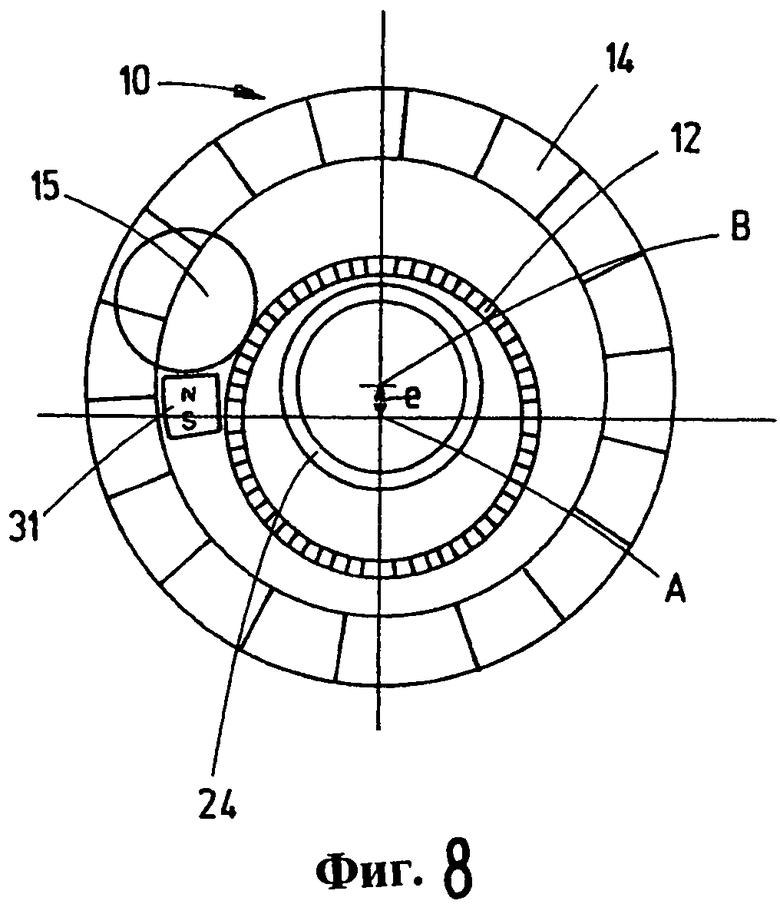
Фиг.8: поперечное сечение первой ступени передачи с функцией демпфирования и опережения.
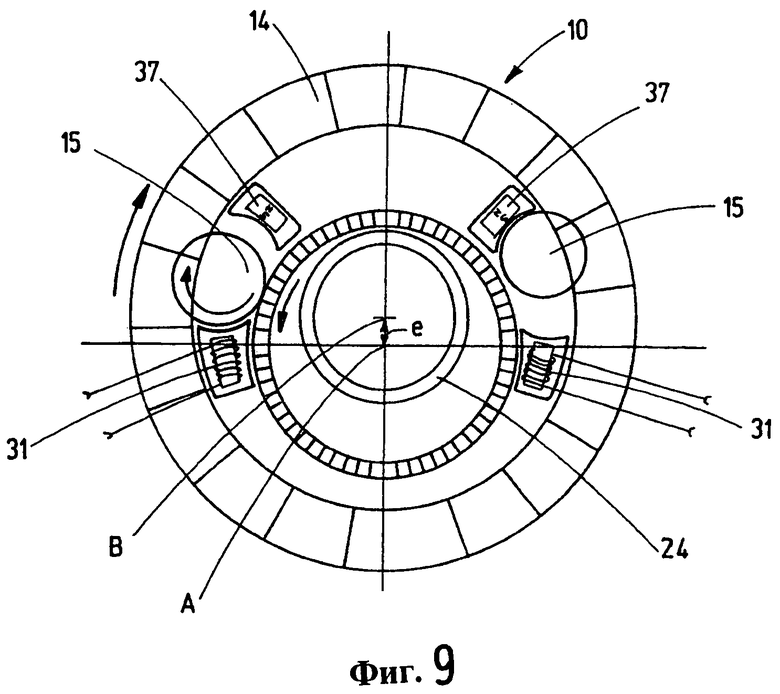
Фиг.9: поперечное сечение первой ступени передачи с функцией электрического соединения.
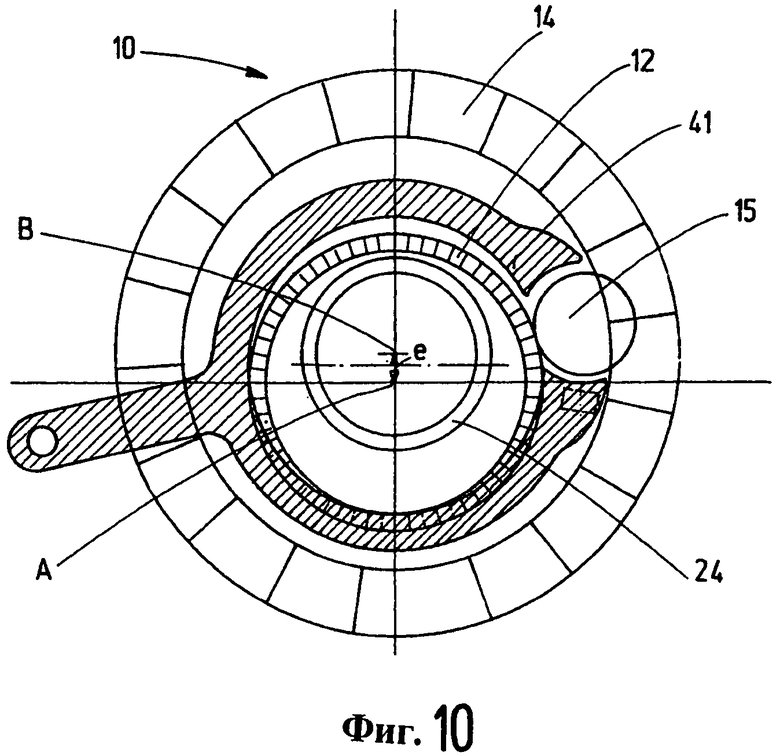
Фиг.10: поперечное сечение первой ступени передачи с функцией механического соединения при помощи вилки переключения передач.
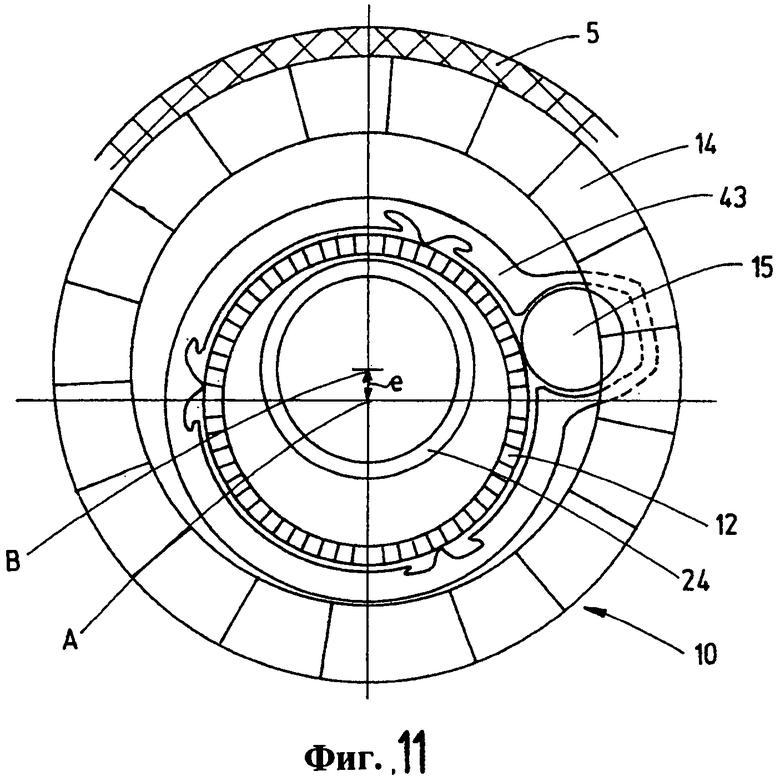
Фиг.11: поперечное сечение первой ступени передачи с функцией механического соединения при помощи скользящего контакта.
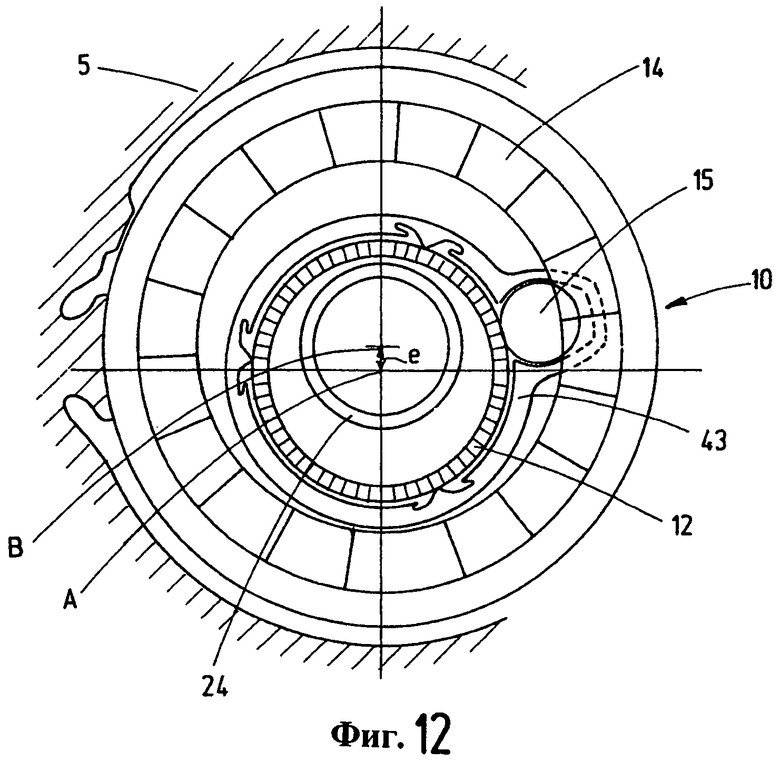
Фиг.12: поперечное сечение первой ступени передачи с корпусом с различными жесткостями подшипников.
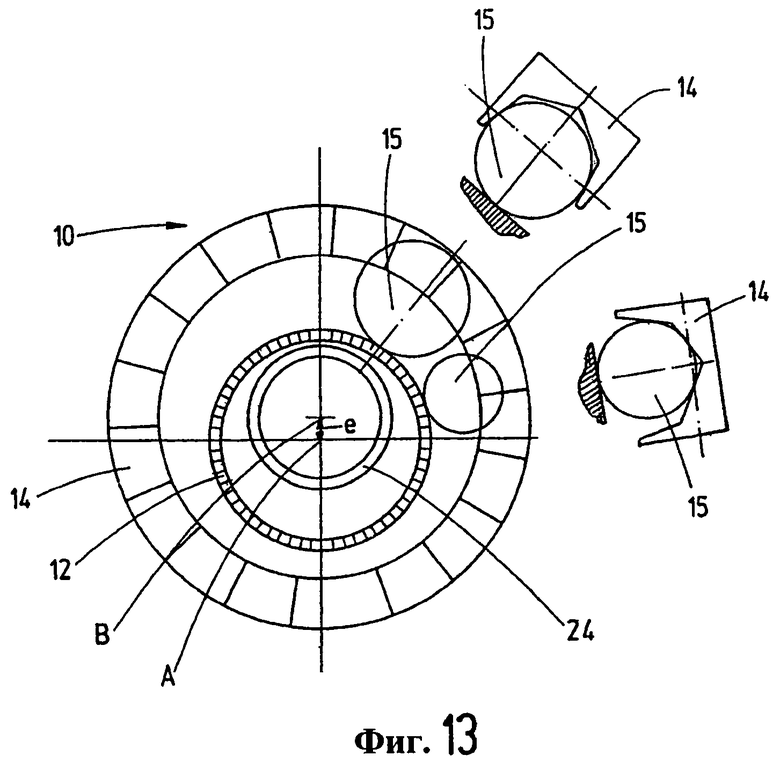
Фиг.13: поперечное сечение первой ступени передачи с разными передаточными отношениями, а также два продольных сечения в области обоих шариков.
Фиг.14: поперечное сечение ступени передачи согласно уровню техники.
Сервопривод 1 для сиденья автомобиля 3 имеет корпус 5 и приводной двигатель 7, находящийся в корпусе 5. Корпус 5 выполнен, как правило, многосекционным, но имеет как можно меньше секций. Приводной двигатель 7, выполненный здесь как электродвигатель постоянного тока с внутренним скользящим контактом, имеет ротор 8, который установлен в корпусе 5 с возможностью вращения вокруг первой оси А и на котором находятся постоянные магниты, и электронно переключающийся статор 9. Ротор 8 установлен в корпусе 5 с помощью двух роторных подшипников 8а, выполненных как подшипники качения.
Сервопривод 1 имеет, кроме того, первую ступень передачи 10, включающую в себя приводной механизм 12, выполненный с возможностью вращения вокруг первой оси А, и ведомый элемент передачи 14, выполненный с возможностью вращения вокруг параллельной ей второй оси В, которые расположены в корпусе 5. Представленный кольцеобразный приводной механизм 12 выполнен предпочтительно за одно целое с ротором 8 приводного двигателя 7 и тем самым с помощью роторных подшипников 8а установлен в корпусе с возможностью качения.
Однако возможно также раздельное выполнение ротора 8 и приводного механизма 12 с подходящим соединением и раздельное размещение в корпусе 5. Представленный также кольцеобразный ведомый элемент передачи 14 установлен в корпусе 5 с помощью подшипника со стороны привода 14а, также выполненного в виде подшипника качения. При этом первая ось А и вторая ось B разнесены между собой на эксцентриситет е, когда роторный подшипник 8а и подшипник со стороны привода 14а установлены неподвижно друг относительно друга. На изображении фиг.1 вторая ось В смещена вверх относительно первой оси А. Положение эксцентриситета е является, таким образом, в пространственном отношении неподвижным относительно корпуса 5. Относительно цилиндрической системы координат, определенной второй осью В, приводной механизм 12, имеющий меньший диаметр, находится радиально внутри, а ведомый элемент передачи 14, имеющий больший диаметр, находится радиально снаружи. Передача сил между приводным механизмом 12 и ведомым элементом 14 происходит в представленном примере выполнения в виде ступени фрикционной передачи с помощью, по меньшей мере, одного шарика 15 (или другого элемента качения), расположенного между приводным механизмом 12 и ведомым элементом 14, где между приводным механизмом 12 и ведомым элементом 14 образуется искривленное клиновидное свободное пространство, названное кратко клиновым зазором. При вращении приводного механизма 12 шарик 15 автоматически зажимается в направлении этого клинового зазора (на изображении фиг.1 в направлении вращения часовой стрелки), затем поворачивается вокруг собственной оси и приводит в действие ведомый элемент передачи 14 с пониженным числом оборотов. В данном случае для каждого направления приведения в действие шарик 15 (или другое тело качения) расположен точно между приводным механизмом 12 и ведомым элементом передачи 14, которые являются каждый раз (до направления вращения) равнодействующими.
В отношении преобразования этой первой ступени передачи 10, когда вращаются все задействованные элементы конструкции исключительно вокруг своей собственной оси, существуют известные отношения, точнее, во-первых, отношение окружностей или радиусов приводного механизма 12 к ведомому элементу передачи 14 и, во-вторых, передаточное отношение самого шарика 15. С помощью контуров на приводном механизме 12 и/или ведомом элементе передачи 14 можно переместить места контактов с шариком 15 из той плоскости, которая расположена перпендикулярно осям А и В и на фиг.1 служит в качестве плоскости чертежа. В качестве проекции на эту плоскость получаются затем другие фактические радиусы шарика 15, т.е. радиус приводного механизма и радиус ведомого элемента передачи, благодаря чему передаточное отношение шарика 15 изменяется. Предпочтительно ведомый элемент передачи 14 на активной поверхности, указывающей в радиальном направлении внутрь, имеет контур, например желоб или V-образную канавку или т.п., внутри которой пробегает шарик 15, обкатывая при этом наклонные стенки. Таким образом, радиус приведения в действие шарика 15 уменьшается и становится даже меньше, чем радиус действия ведомого элемента передачи, и влияет на передаточное число. Например, выполнение V-образной канавки на приводном механизме и цилиндрической поверхности на ведомом элементе передачи может влиять на передаточное число повышающей передачи. Наряду с непосредственной передачей радиальных усилий это представляет собой преимущество ступени фрикционной передачи перед ступенью зубчатой передачи.
При вращательном моменте, рассматриваемом как постоянный, за счет эксцентриситета е получается угол между силовыми активными линиями действующих на шарик 15 сил и усилием в радиальном направлении, которое пропорционально тангенсу этого угла и значение которого и направление показаны на фиг.1 на внешней стороне ведомого элемента передачи. Величина этого радиального усилия допускает, если рассматривать все возможные положения шарика, двойное максимальное значение (теоретически бесконечно!) и минимальное значение. Если шарик 15 находится, например, на фиг.1 примерно в положении, соответствующем 12 или 6 часам, т.е. в запрещенной области угла R>, то угол при вершине клина минимальный, а наименьшие тангенциальные приводные усилия приводного механизма 14 приводят к чрезмерным усилиям в радиальном направлении, а при действительных элементах конструкции с ограниченными жесткостями, таким образом, - к радикальным деформациям. Делая вывод от противного, эта взаимозависимость для размещения в опорах приводного механизма 12 и ведомого элемента передачи 14 означает то, что для имеющихся подшипников с максимально допустимыми усилиями на опоре при данном максимальном вращающем моменте приводного механизма 12 шарик 15 может приводиться в действие только в точно определенной, разрешенной области угла R< (на изображении фиг.1 примерно между 13 ч и 16.30 ч). То же относится, конечно же, и к нагрузке самого шарика 15.
Описанные радиальные усилия, которые в один момент достигают минимума, должны приниматься в опорных узлах и в контакте с шариком и вызывают там неизбежно потери. Предпочтительная форма выполнения с максимальным коэффициентом полезного действия представляет вариант, при котором шарик занимает положение точно в области минимальных радиальных усилий, которая, помимо величины эксцентриситета е, также зависит от соотношений диаметров.
В принципе описанную первую ступень передачи 10 с фиксированным эксцентриситетом можно применять в разных сочетаниях с другими ступенями передачи. В данном случае сервопривод 1 имеет вторую ступень передачи 20. Первая ступень передачи 10 служит в качестве предварительной ступени для второй ступени передачи 20, находящейся на стороне ведомого элемента передачи.
Вторая ступень передачи 20 выполнена в данном случае в виде зубчатой эксцентриковой планетарной передачи. Приводной вал 21, выполненный с возможностью вращения вокруг второй оси B, опирается с помощью первого эксцентричного участка 21а и второго эксцентричного участка 21b, смещенного вдоль второй оси В в осевом направлении, на две малые шестерни 22а и 22b, смещенные друг относительно друга предпочтительно на 180° и находящиеся в двух плоскостях. И первая малая шестерня 22а, и вторая малая шестерня 22b, которые выполнены предпочтительно одинаковыми, образуют снаружи зубчатое зацепление между собой и сцепляются с внутренним зацеплением корпуса 5, которое в отличие от малых шестерней 22а и 22b имеет большее число зубьев, по меньшей мере, на один больше. При вращении приводного вала 21, установленного по центру и жестко соединенного с ведомым элементом передачи 14, малые шестерни 22а и 22b выполняют движение обкатки корпуса 5. Малые шестерни 22а и 22b действуют при помощи штифтов и отверстий на общий выходной вал 24, который выполнен в виде полого вала и который также вращается. В данном случае приводной вал 21, а также выходной вал 23 расположены концентрично относительно второй оси В, так что в конечном счете приводной двигатель 7 расположен со смещением относительно двухступенчатой конструктивной группы передач, состоящей из первой ступени передачи 10 и второй ступени передачи 20, в общей сложности на эксцентриситет Е, который задан постоянным по положению и величине от общего корпуса 5. Действительно большое количество подшипников качения на фиг.2 служит повышению общего коэффициента полезного действия. Однако в измененных формах выполнения можно использовать также подшипники скольжения.
В качестве конструктивного детального решения предпочтительно предусмотрено, что кольцеобразный ведомый элемент передачи 14 первой ступени передачи 10 и приводной вал 21 второй ступени передачи 20, соединенный с ним и выполненный в виде двойного эксцентрикового вала, выполнен как одно целое в виде втулки со всеми необходимыми канавками для шарика, и их можно изготовить предпочтительно в процессе деформации без снятия стружки или калибровки. На фиг.3 это видно.
За счет положения эксцентриситета е, в пространственном отношении неподвижного относительно корпуса 5 и тем самым также шариков 15, в условиях эксплуатации появляется множество новых возможностей для решения задач как в отношении конструктивного выполнения, так и в отношении общей функциональности. Далее будут описаны более подробно некоторые выгодные аспекты.
При известных выполнениях обкатных эксцентриков, движущихся по замкнутой траектории, шарики 15 совершают вращательное движение в пространстве, а прижимный элемент 31 должен вместе с ними принудительно совершать тоже вращательное движение для создания постоянно присутствующей, незначительной прижимной силы для шариков 15. Простым и часто применяемым решением являются при этом пружины сжатия в виде спиралей, как это показано на фиг.4. Однако такие спиральные пружины сжатия имеют тенденцию колебаться и вступают как с шариками 15, так и с ведомым элементом передачи 14 в контакт, который обязательно обладает потерями. На основании зафиксированного относительно корпуса 5 положения возможна реализация явно выгодного выполнения прижимного элемента 31, например применение жестко соединенной с корпусом плоской пружины из металла или пластмассы с минимальной плоскостью контактирования с шариком, как это представлено на фиг.5.
В качестве одной из форм выполнения, возможно, менее выгодной в экономическом плане, но более изящной с технической точки зрения и почти без потерь и шумов, предлагаются в качестве прижимных элементов 31 при применении стальных шариков 15 магниты для создания бесконтактной прижимной силы, как это видно на фиг.6.
Во всех случаях шарики 15 с помощью прижимного элемента или прижимных элементов 31 вдавливаются или затягиваются в клиновой зазор и тем самым прижимаются одновременно к приводному механизму 12 и ведомому элементу передачи 14. С конструктивной точки зрения, шарик 15 со своими силами, действующими под углом друг к другу, представляет собой в конечном итоге одновременно роликовый или в данном случае шариковый механизм свободного хода. Свободный ход представляет собой самовключающееся соединение. При эксплуатации, т.е. во время приводного движения, работает только тот шарик 15, который, благодаря приводному механизму 12, дальше продвигается в клиновой зазор и контактирует как с приводным механизмом 12, так и с ведомым элементом передачи 14. Находящийся напротив шарик 15, выполненный для противоположного направления движения привода, несмотря на прижимной элемент 31, выскакивает из предназначенного для него клинового зазора и освобождается от двойного контакта.
Действие в виде роликового или шарикового механизма свободного хода можно вполне использовать в некоторых случаях в технике приведения в действие в рациональных комбинациях. На фиг.7 показана область задней части салона автомобиля с электрически деблокированным замком 33 на верхнем краю спинки 35 сиденья автомобиля 3. Для комфортного и быстрого изменения салона автомобиля известны такие конструкции, при которых спинка 35 с нагрузкой на пружину установлена в положение вперед и зафиксирована с возможностью освобождения. Таким образом, спинка 35 при отпирании с помощью электрики замка 33 самостоятельно наклоняется вперед. Для возврата в представленное положение спинку 35 нужно снова наклонить вручную.
Другое повышение комфортабельности достигается, во-первых, за счет, при необходимости, контролируемого гашения колебаний вследствие наклонения вперед, вызванного действием пружины, и, во-вторых, за счет повторного откидывания с помощью электрики. Этого можно добиться с помощью варианта сервопривода 1, имеющего заявленное выполнение первой ступени передачи 10 с фиксированным положением эксцентриситета, и с помощью выполнения фрикционного диска, если подключенные ступени передачи не являются самотормозящими, что в описанном применении абсолютно рационально.
На фиг.8 показан вариант передачи, которая работает в этом случае с предварительно намагниченным шариком 15. Сервопривод 1 с этой первой ступенью передачи 10 встроен в узел крепления, служащий в качестве регулятора наклона спинки. Если в положении, показанном на фиг.7, спинка 35 в области своего верхнего края при воздействии электрического тока деблокируется и отклоняется вперед, т.е. против часовой стрелки, как это показано на фиг.7, ведомый элемент передачи 14 вращается на фиг.8 также против часовой стрелки, удерживает контакт с приводным механизмом 12 и приводит в действие ротор 8. В предложенном случае с электродвигателем постоянного тока ротор 8 может нести нагрузку либо без точно контролируемого тормозного момента, либо с ним, например, для определения максимальной скорости отклонения и замедления движения незадолго до завершения возможного угла движения. Если спинку 35 нужно затем снова откинуть с помощью электрического тока, ротор 8 в данном случае работает против движения часовой стрелки, а ведомый элемент передачи 14, а также спинка 35 вращаются по часовой стрелке на фиг.7 и 8. Существует также особенность, заключающаяся в том, что это движение спинки 35, созданное двигателем, можно опередить вручную («функция опережения»). В случае если на ведомом элементе передачи инициируется момент, т.е. привнесенное снаружи ускорение ведомого элемента передачи 14, то шариковый механизм свободного хода открывается автоматически, т.е. шарик 15 выходит из клинового зазора, приводной механизм работает вхолостую, и спинку 35 можно отклонить вручную. При прерывании подачи электропитания или в аварийных ситуациях это позволит откинуть спинку 35 только вручную.
На базе физических соотношений шарика 15, которые в описанном как раз случае способствуют автоматическому расцеплению первой ступени передачи 10, эта первая ступень передачи 10 простым образом выполняет другую функцию, необходимую в технике приводных механизмов, а именно работу включенного сцепления, которая в случае необходимости может даже зависеть от направления. На фиг.9 показано расположение, при котором оба шарика 15 независимо друг от друга могут занимать пассивную или активную позицию. Для обоих шариков 15 в верхней области свободного пространства между приводным механизмом 12 и ведомым элементом передачи 14 предусмотрено устройство для удержания 37 (здесь представлена простая геометрия с очень слабым магнитом). Устройство для удержания 37 устанавливает шарик 15 в положение покоя, так что он не контактирует с приводным механизмом 12 и/или ведомым элементом передачи 14 (т.е., по меньшей мере, с одним или, при необходимости, с двумя конструктивными элементами), благодаря чему в положении покоя приводной механизм 12 и ведомый элемент передачи 14 полностью разъединены между собой. В нижней области свободного пространства предусмотрены два отдельных или отдельно включаемых электромагнитов, которые служат в качестве прижимных элементов 31 и которые при активизации притягивают шарик 15 и тем самым запирают замкнутый силовой поток для этого соответствующего направления движения. Так как прижимные силы, необходимые при повышенных вращательных моментах, при эксплуатации настраиваются автоматически вследствие действия клина, то для включения такого сцепления достаточно минимума энергии, которая должна обеспечить только слабый контакт к началу движения. Электромагниты, используемые как прижимные элементы 31, могут затем при работе снова включаться в отсутствие электропитания.
Наряду с уже описанной реализацией соединительной функции с помощью электропитания возможна реализация решения механическим путем. В примере выполнения согласно фиг.10 применяют, например, поводковые вилки 41, из которых представлена только одна. Такой поводковой вилкой 41 можно управлять извне. Управляемые поводковые вилки 41 приводят шарики 15 соответственно в активную позицию (внутрь клинового зазора) или пассивную позицию (вне клинового зазора) и тем самым позволяют приводному двигателю 7 выключиться, чтобы, например, выполнить ручную быструю регулировку или снова аварийное управление, как это было описано в связи с фиг.7 и 8.
Еще одно выгодное выполнение соединительной функции представлено на фиг.11, на которой можно видеть направляющее кольцо для шарика 43, которое охватывает приводной механизм 12 и находится с ним в трех местах в легком скользящем контакте и направляет шарик 15. Направляющее кольцо для шарика 43, при условии слабого скользящего контакта с приводным механизмом 12, имеет тенденцию сдвигать шарик 15 внутрь свободного пространства всегда в направлении привода ротора 8 (т.е. внутрь клинового зазора) и далее в разъединенном состоянии само, как и шарик 15, сохраняет свое угловое положение. При изменении направления вращения, напротив, шарик 15, освобожденный от своего контакта, отклоняется в противоположную сторону. При этом получающаяся экономия от отсутствия второго шарика 15 имеет меньше значения, чем тот факт, что с помощью этого устройства без других активных элементов управления или магнитов передачу можно полностью выключить, обратно вращая ротор 8 (и вместе с тем приводной механизм 12) после завершения приводного движения под известным углом (на фиг.11 примерно 80° против часовой стрелки). Это дает возможность контролировать разгрузку напряжений во всем сервоприводе 1 и позволяет, например, охватить опорные узлы приводного механизма и ведомого элемента передачи эластомерным кольцом с целью уменьшения звукопроведения или также для целенаправленного управления упругим смещением элементов передачи при работе под нагрузкой. В качестве побочного эффекта следует отметить, что такое выполнение позволяет также использовать немагнитные материалы для шарика, например керамику или пластмассу.
Возможное выполнение, предусматривающее корпус 5 умышленно с разными жесткостями подшипников, представлено на фиг.12. С помощью таких разных и зависящих от пространственной ориентации жесткостей подшипников можно, например, уменьшить радиальные усилия. В данном случае речь идет о варианте выполнения фиг.11. В частности, при использовании термопластичных пластмасс в качестве материала для корпуса рекомендуется выключение первой ступени передачи 10 для сведения к минимуму расползания материала после более длительного простоя при высоких температурах.
С помощью описанных возможностей подключения и освобождения шариков 15 напрашивается вывод, что первую ступень передачи 10 можно представить в виде передачи с разными, зависящими от направления или включаемыми передаточными, отношениями. На фиг.13 в качестве примера представлен ступенчатый внутренний контур ведомого элемента передачи 14. В сочетании с разным из-за эксцентриситета е удалением от приводного механизма 12 шарики 15 по-разному контактируют с этим внутренним контуром. Тем самым эти ступени передачи могут переключаться благодаря освобождению одного шарика 15 и подключению другого шарика 15. В области привода сиденья зачастую имеют место зависящие от направления движения затраты мощности или моментов. С такой возможностью переключения для ситуаций с разными нагрузками (регулятор высоты сидения вверх - большой момент, регулятор высоты вниз - малый момент) априори можно установить подходящее передаточное число для каждого направления движения. По тому же принципу можно установить более двух передаточных отношений.
В качестве альтернативы для показанного варианта выполнения фиг.13 с двумя шариками 15 разного передаточного отношения в одном единственном ведомом элементе передачи 14 можно, разумеется, в том же смысле определить также геометрию контакта приводного механизма 12 или можно расположить один или несколько ведомых элементов передачи 14 (или приводных механизмов 12) аксиально друг над другом или предусмотреть два разных контура на ведомом элементе передачи 14 (или на приводном механизме 12). Вместо шариков 15 можно предусмотреть и другие тела качения.
Перечень обозначений
1 сервопривод
3 сиденье автомобиля
5 корпус
7 приводной двигатель
8 ротор
8а подшипник ротора
9 статор
10 первая ступень передачи
12 приводной механизм
14 ведомый элемент передачи
14а подшипник ведомого элемента передачи
15 шарик
20 вторая ступень передачи
21 приводной вал
21а первый эксцентриковый участок
21b второй эксцентриковый участок
22а первая малая шестерня
22b вторая малая шестерня
24 ведомый вал
31 прижимной элемент
33 замок спинки
35 спинка
37 устройство для удержания
41 поводковая вилка
43 направляющее кольцо для шарика
А первая ось
В вторая ось
е эксцентриситет
R< разрешенная область угла
R> запрещенная область угла
| название | год | авторы | номер документа |
|---|---|---|---|
| СТУПЕНЬ ПЕРЕДАЧИ | 2008 |
|
RU2499695C2 |
| СТУПЕНЬ ПЕРЕДАЧИ ИСПОЛНИТЕЛЬНОГО ПРИВОДА | 2006 |
|
RU2402433C2 |
| ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ КРЕСЛА ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2520182C2 |
| ШАРИКОВЫЙ ПЕРЕДАЮЩИЙ УЗЕЛ ПРЕОБРАЗОВАТЕЛЯ СКОРОСТИ (ВАРИАНТЫ) | 2004 |
|
RU2291993C2 |
| Коляска для людей с ограниченными возможностями в ходьбе | 2019 |
|
RU2688288C1 |
| ЭКСЦЕНТРИКОВАЯ ШАРИКОВАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 2007 |
|
RU2341710C1 |
| Коляска с функцией подъёма по лестницам для людей с ограниченными возможностями в ходьбе | 2019 |
|
RU2688289C1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| МЕХАНИЗМ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ РАКЕТОЙ | 2005 |
|
RU2316720C2 |
| Привод транспортного средства, приводимого в действие мускульной силой человека | 1986 |
|
SU1505832A1 |


Изобретение относится к регулятору положения сиденья транспортного средства в виде ступени передачи (10). Ступень передачи (10) выполнена в виде ступени фрикционной передачи и содержит: корпус (5), ведущий элемент (12), ведомый элемент (14), отстоящий от ведущего элемента (12) на эксцентриситет (е). Причем между ведущим элементом (12) и ведомым элементом (14) образован клиновой зазор и расположено одно тело качения (15) для передачи усилий от ведущего элемента (12) к ведомому элементу (14). Между ведущим элементом (12) и ведомым элементом (14) для каждого приводного направления предусмотрено по одному такому телу качения (15), которое при вращении ведущего элемента (12) в направлении клинового зазора автоматически продвигается в клиновой зазор и зажимается там. Для ведущего элемента (12) и ведомого элемента (14) предусмотрены подшипники (8а, 14а), расположенные на стационарных местах в корпусе (5). При этом предусмотрен прижимной элемент (31), который жмет или тянет тело качения (15) в клиновой зазор между ведущим элементом (12) и ведомым элементом (14), а тела качения выполнены равнодействующими, кроме направления движения. Достигается повышение надежности устройства. 10. з.п. ф-лы, 14 ил.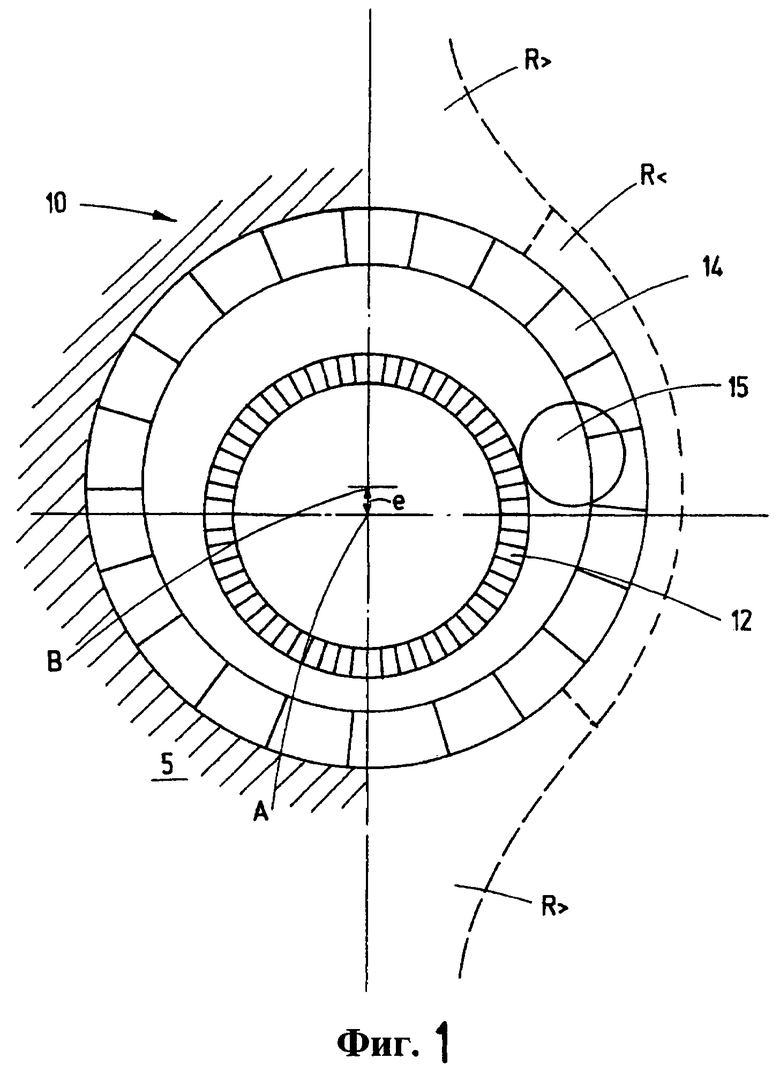
1. Ступень передачи, в частности сиденья автомобиля, выполненная в виде ступени фрикционной передачи и содержащая: корпус (5), ведущий элемент (12), ведомый элемент (14), отстоящий от ведущего элемента (12) на эксцентриситет (е), положение которого в пространстве относительно корпуса (5) стационарно, причем между ведущим элементом (12) и ведомым элементом (14) образован клиновой зазор, по меньшей мере, одно тело качения (15), предусмотренное для передачи усилий от ведущего элемента (12) к ведомому элементу (14), при этом между ведущим элементом (12) и ведомым элементом (14) для каждого приводного направления предусмотрено по одному такому телу качения (15), которое при вращении ведущего элемента (12) в направлении клинового зазора автоматически продвигается в клиновой зазор и зажимается там, затем поворачивается вокруг своей оси и редуцированно приводит в действие ведомый элемент передачи (14), причем для ведущего элемента (12) и ведомого элемента (14) предусмотрены подшипники (8а, 14а), расположенные на стационарных (постоянных в пространстве) местах в корпусе (5), при этом предусмотрен прижимной элемент (31), который жмет или тянет тело качения (15) в клиновой зазор между ведущим элементом (12) и ведомым элементом (14), при этом в каждом случае тела качения выполнены равнодействующими, кроме направления движения.
2. Ступень передачи по п.1, отличающаяся тем, что подшипники (8а, 14а) выполнены в качестве подшипника качения.
3. Ступень передачи по п.1, отличающаяся тем, что прижимной элемент (31) выполнен в качестве пружины и/или магнита.
4. Ступень передачи по п.1, отличающаяся тем, что прижимной элемент (31) установлен жестко в корпусе (5).
5. Ступень передачи по п.1, отличающаяся тем, что корпус (5) имеет разные жесткости для подшипников (8а, 14а) ведущего элемента (12) и ведомого элемента (14) и/или для разных приводных направлений ведущего элемента и/или для различных пространственных направлений.
6. Ступень передачи по п.1, отличающаяся тем, что имеющиеся тела качения (15) установлены в опорах за счет контакта с ведущим элементом (12) и/или ведомым элементом (14).
7. Ступень передачи по п.1, отличающаяся тем, что в рабочем состоянии только одно тело качения (15) контактирует как с ведущим элементом (12), так и с ведомым элементом (14).
8. Ступень передачи по п.1, отличающаяся тем, что она выполнена в виде переключаемого соединения, при котором тело качения (15) выдвигается из клинового зазора или вдвигается в него между ведущим элементом (12) и ведомым элементом (14) с помощью электрического тока, например, с помощью комбинации устройства для удержания (37) и прижимного элемента (31), и/или механическим путем, например, с помощью поводковой вилки (41) или с помощью соответствующего скользящего контакта.
9. Ступень передачи по п.1, отличающаяся тем, что по окончании приводного движения ведущий элемент (12) поворачивается обратно на заданный угол для выпускания тела качения (15) из клинового зазора между ведущим элементом (12) и ведомым элементом (14).
10. Ступень передачи по п.1, отличающаяся тем, что она выполнена в виде передаточного механизма с двумя разными, зависимыми от направления и/или переключаемыми передаточными отношениями с использованием двух разных тел качения (15) и/или контуров на ведущем элементе (12) и/или на ведомом элементе (14).
11. Ступень передачи по одному из пп.1-10, отличающаяся тем, что она выполнена в виде механизма свободного хода, который отпирается за счет момента, инициированного на ведомом элементе (14), когда тело качения (15) выдвигается из клинового зазора между ведущим элементом (12) и ведомым элементом (14).
| Установка для испытания образцов на длительную прочность при растяжении с нагревом | 1986 |
|
SU1323909A1 |
| CH 229919 A, 30.11.1943 | |||
| Шарнир для регулируемого сиденья транспортного средства | 1973 |
|
SU537619A3 |
| Фрикционная передача | 1975 |
|
SU655846A1 |
| DE 102005039733 A1, 01.03.2007. | |||

