Изобретение относится к ракетной технике и может быть использовано при создании ракетных двигателей.
Из патента РФ №2195564 известно поворотное управляющее сопло (ПУС) ракетного двигателя твердого топлива на шаровой опоре, содержащее неподвижную часть, опертую на нее через кольцевой набор стальных шаров поворотную часть, резиновое уплотнительное кольцо, герметизирующее объем камеры сгорания по сферическому поясу, определяющему совместно с шаровой опорой центр поворота сопла. Шары воспринимают осевую газодинамическую силу, действующую на поворотную часть, и могут перекатываться по выпуклой (на шпангоуте поворотной части) и вогнутой (на шпангоуте неподвижной части) сферическим поверхностям, обеспечивая опорную и шарнирную функции соединения.
Данная конструкция принята за прототип.
Недостатком данной конструкции является большая масса шаровой опоры, обусловленная тем, что осевая газодинамическая сила воспринимается шарами под углом ~ 60° к оси сопла (распорный эффект), в местах контакта шаров со сферическими поверхностями имеют место высокие контактные напряжения вследствие точечного характера контакта (требуется значительное количество шаров), силовые шпангоуты на неподвижной и поворотной частях имеют крупные габариты из-за значительного количества шаров и достаточно высокой жесткости для обеспечения требуемой точности отклонения поворотной части на заданный системой управления угол в заданном направлении.
Задачей изобретения является снижение массы сопла.
Технический результат заключается в снижении массы сопла ракетного двигателя твердого топлива за счет применения в качестве тел качения цилиндрических роликов.
Технический результат достигается тем, что в сопле ракетного двигателя на роликовой опоре, содержащем неподвижную часть, поворотную часть, резиновое уплотнительное кольцо, герметизирующее объем камеры сгорания по сферическому поясу на поворотной части, определяющему центр вращения последней, поворотная часть опирается на неподвижную часть через промежуточную подвижную опору, выполненную в виде охватывающей поворотную часть рамки, соединенной с поворотной частью парой расположенных на противоположных сторонах рамки роликовых шарниров, каждый из которых представляет собой ряд цилиндрических роликов, перекатывающихся по цилиндрическим дорожкам, выпуклой, расположенной на поворотной части, и вогнутой, расположенной на промежуточной подвижной опоре, соединенной, в свою очередь, с неподвижной частью аналогичной парой роликовых шарниров с выпуклыми дорожками на промежуточной подвижной опоре и с вогнутыми дорожками на неподвижной части.
Применение цилиндрических роликов вместо шаров ведет, за счет перехода от контакта в точке к контакту по линии, к существенному повышению допустимой нагрузки на одно тело качения, что позволяет уменьшить их общее количество и увеличить кривизну контактных поверхностей. Это обеспечивает уменьшение массы и габаритов узла подвески поворотной части сопла. Однако контактные поверхности при этом должны быть цилиндрическими, что достигается механическим выделением двух составляющих угла отклонения поворотной части, каждая из которых реализуется путем перекатывания двух симметрично расположенных относительно плоскости отклонения наборов цилиндрических роликов по аналогичным образом расположенным цилиндрическим дорожкам. Дорожки, расположенные ближе к соответствующей оси вращения, являются выпуклыми, по ним определяется контактная прочность опоры. Из условия контактной прочности с учетом количества тел качения выбираются радиусы дорожек и роликов, по возможности минимальные. Распределение нагрузки по телам качения определяется по методике, используемой при расчете подшипников. Чем меньше радиусы дорожек, тем меньше сопротивление опоры при отклонении, меньше путь роликов при отклонении, меньше габариты и масса опоры. Дорожки с роликами в паре располагаются симметрично относительно соответствующей плоскости отклонения в параллельных ей плоскостях по бокам поворотной части, что обеспечивает небольшие распорные углы для усилий, действующих на отдельные тела качения. Это выгодно отличает роликовую опору от шаровой опоры, где распорные углы имеют значение порядка 60°. При необходимости увеличить количество тел качения в роликовой опоре можно произвести замену роликов, аналогичную замене шаров на шаростержни в шаровой опоре. При малых углах отклонения в контакт с дорожками вступает не вся поверхность тела качения, что позволяет удалить часть его объема, включающую поверхность, не вступающую в контакт, и освободить пространство для увеличения количества тел качения.
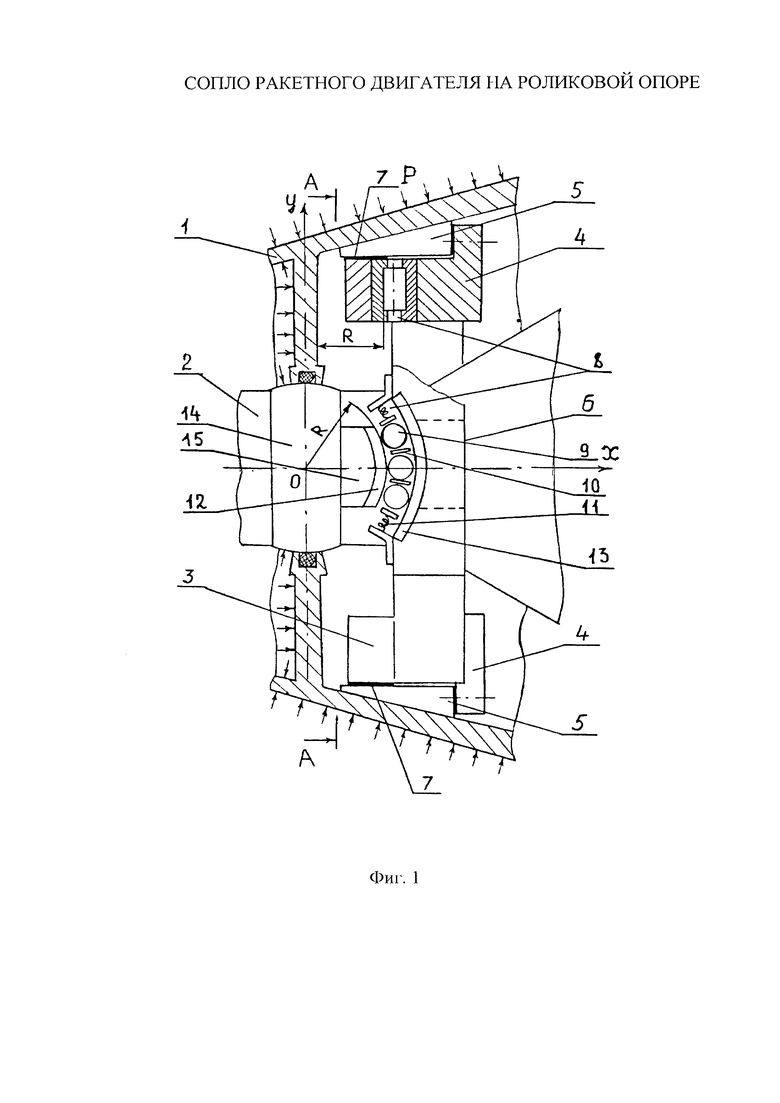
На фиг. 1 приведен эскиз поворотного управляющего сопла ракетного двигателя на роликовой опоре.
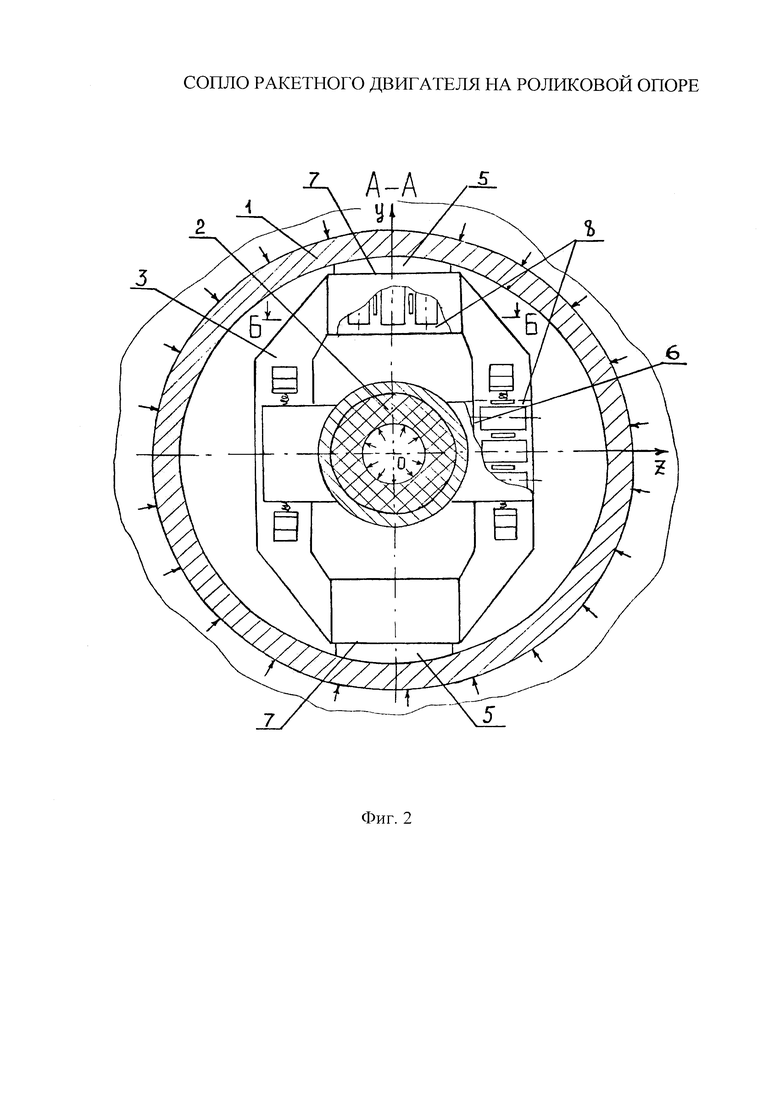
На фиг. 2 приведен показанный на фиг. 1 разрез А-А сопла плоскостью, перпендикулярной продольной оси двигателя (оси ОХ).
На фиг. 3 приведен показанный на фиг. 2 разрез Б-Б по соединенной с неподвижной частью стороне, промежуточной подвижной опоре.
На рисунках XYZ - правая прямоугольная система координат с началом в центре поворота сопла О, жестко связанная с промежуточной подвижной опорой 3, выполненной в виде рамки, охватывающей поворотную часть 2 по плоскости, перпендикулярной оси ОХ. Поворотная часть 2 может вращаться только вокруг оси OZ (перпендикулярна плоскости рисунка на фиг. 1), а промежуточная подвижная опора 3 - только вокруг оси OY. Неподвижный корпус сопла 1, утопленный в корпус двигателя, показан в разрезе по плоскости XOY при нулевых положениях поворотной части 2 и промежуточной подвижной опоры 3. По его поверхности, обращенной внутрь корпуса двигателя, действует внутрикамерное давление Р. Детали теплозащиты на фиг. 1 не показаны. Частично, до волнистой линии вырыва, в разрезе по плоскости XOY показаны промежуточная подвижная опора 3, неподвижная опора 4, соединенная с промежуточной подвижной опорой 3 роликовым шарниром 8, обеспечивающим в паре с таким же симметрично расположенным относительно плоскости XOZ шарниром 8, вращение промежуточной подвижной опоры 3 относительно оси OY.
Требуемый угол отклонения поворотной части 2 в пространстве механически реализуется за счет ее одновременного отклонения в двух плоскостях - XOY вокруг оси OZ и XOZ вокруг оси OY. Первое отклонение обеспечивается за счет вращения вокруг оси OZ поворотной части 2 относительно промежуточной подвижной опоры 3 на двух роликовых шарнирах 8, расположенных симметрично относительно плоскости XOY. Второе отклонение обеспечивается за счет вращения самой промежуточной подвижной опоры 3 вокруг оси OY на идентичных роликовых шарнирах 8, расположенных симметрично относительно плоскости XOZ. В данном описании радиусы вращения R (фиг. 1) роликовых шарниров, обеспечивающих углы поворота вокруг взаимно перпендикулярных осей OZ и OY, приняты одинаковыми, что, в принципе, не обязательно, но унифицирует роликовые шарниры 8. Для уменьшения габаритов конструкции и ее массы промежуточная подвижная опора 3 устанавливается как можно ближе к центру поворота О. Так как в обеих плоскостях отклонения для роликовых шарниров 8 приняты одинаковые радиусы вращения R, то стороны промежуточной подвижной опоры 3, опирающиеся на неподвижные опоры 4 для обеспечения вращения опоры 3 вокруг оси OY, имеют П-образный излом, как показано на фиг. 3 (положение сечения Б-Б показано на фиг. 2). Для фиксации плоскости отклонения поворотной части 2 относительно промежуточной подвижной опоры 3 вокруг оси OZ на поворотной части 2 и с внутренней стороны промежуточной подвижной опоры 3 предусмотрены расположенные симметрично относительно плоскости XOY две пары центрирующих площадок 6, контактирующих по скользящей посадке. Аналогичные две пары центрирующих площадок 7, расположенных симметрично относительно плоскости XOZ на жестко связанных с неподвижным корпусом 1 выступах 5 и с наружной стороны промежуточной подвижной опоры 3, предусмотрены для фиксации плоскости отклонения промежуточной подвижной опоры 3 относительно неподвижного корпуса 1 вокруг оси OY. Такое центрирование исключает вращение поворотной части 2 вокруг оси ОХ и обеспечивает выполнение команд системы управления по направлению и величине угла отклонения поворотной части 2 с высокой точностью. Следует иметь в виду, что внутрикамерное давление Р сжимает неподвижный корпус 1, что может привести к уменьшению зазоров между центрирующими площадками 7. Промежуточная подвижная опора 3 через роликовые шарниры 8 опирается на неподвижные опоры 4, жестко связанные через выступы 5 с неподвижным корпусом 1.
Роликовый шарнир 8 состоит из роликов 9, сепаратора 10, пары пружин 11, выпуклой и вогнутой по отношению к роликам 9 цилиндрических дорожек 12 и 13, выполненных по аналогии с роликовыми подшипниками из сплава повышенной твердости и с буртами у рабочих поверхностей, обеспечивающих требуемое положение роликов и дополнительное центрирование шарнирно-упорного узла. Пружины 11 совместно с традиционным стопорно-фиксирующим устройством поворотной части 2 (на схеме не показано) обеспечивают требуемое положение роликов 9 в процессе сборки и транспортировки двигателя. Необходимо отметить, что в роликовых шарнирах 8 предпочтительней использовать четное количество роликов 9, так как при нечетном их количестве средние ролики оказываются в неустойчивом положении по отношению к плоскости, образованной соответствующей осью вращения и осью поворотной части 2. Считается, что выталкивающая газодинамическая сила действует на поворотную часть 2 вдоль ее оси, а при смещении средних роликов из указанной выше плоскости может произойти нежелательное отклонение упругой реакции опоры пары роликовых шарниров от оси поворотной части 2, что приведет к отклонению вектора тяги двигателя от заданного направления.
На поворотной части 2 сопла имеется сферический пояс 14, обеспечивающий с уплотнением на неподвижном корпусе 1 герметизацию объема камеры сгорания при всех возможных положениях поворотной части 2. Далее по оси ОХ на поворотной части 2 идет пара жестко связанных с ней симметричных относительно плоскости XOY упоров 15 для установки роликовых шарниров 8 на выпуклые дорожки 12. Соответственно на промежуточной подвижной опоре 3 предусмотрены гнезда для вогнутых дорожек 13 роликовых шарниров 8.
На фиг. 2 показан разрез А-А (фиг. 1), на котором обозначен разрез Б-Б (показан на фиг. 3) по стороне промежуточной подвижной опоры 3 с П-образным выступом для роликовых шарниров 8, соединяющих промежуточную подвижную опору 3 с неподвижными опорами 4, жестко связанными с неподвижным корпусом 1, через местные выступы 5 на нем.
Таким образом, предложена конструкция поворотного управляющего сопла ракетного двигателя, в которой для отклонения поворотной части используется роликовая опора, позволяющая за счет применения для тел качения контакта по линии уменьшить контактные напряжения, количество тел качения, габариты опорного узла и, как следствие, массу конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сопло ракетного двигателя на цилиндрических эластичных шарнирах | 2019 |
|
RU2705496C1 |
| Сдвигаемое управляющее сопло ракетного двигателя | 2023 |
|
RU2819485C1 |
| ПОВОРОТНОЕ УСТРОЙСТВО ДЛЯ КОНВЕЙЕРА | 2008 |
|
RU2477250C2 |
| ПОВОРОТНОЕ УПРАВЛЯЮЩЕЕ СОПЛО РАКЕТНОГО ДВИГАТЕЛЯ | 2001 |
|
RU2195564C1 |
| МНОГОКАНАЛЬНАЯ ЛИНЗОВАЯ АНТЕННА СО СТАБИЛИЗИРУЕМОЙ И УПРАВЛЯЕМОЙ ПО УГЛАМ МНОГОЛУЧЕВОЙ ДИАГРАММОЙ НАПРАВЛЕННОСТИ | 2006 |
|
RU2314611C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОФИЛЯ ГРАНИЧНОЙ ПОВЕРХНОСТИ ТВЕРДОГО ТЕЛА В ВИДЕ ЗУБА | 1994 |
|
RU2086207C1 |
| ПЛАНЕТАРНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА С РАСПРЕДЕЛЕННОЙ НАГРУЗКОЙ (ВАРИАНТЫ) | 1994 |
|
RU2114343C1 |
| ПЛАНАРНЫЙ СКАНЕР | 1989 |
|
SU1841123A1 |
| ДВИГАТЕЛЬНАЯ УСТАНОВКА И ПОДВЕС ДВИГАТЕЛЯ | 1997 |
|
RU2175935C2 |
| УДАРОСТОЙКОЕ ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 2001 |
|
RU2241149C2 |

Изобретение относится к ракетной технике и может быть использовано при создании ракетных двигателей. Сопло ракетного двигателя на роликовой опоре содержит неподвижную часть, поворотную часть, резиновое уплотнительное кольцо, герметизирующее объем камеры сгорания по сферическому поясу на поворотной части, определяющему центр вращения последней. Поворотная часть опирается на неподвижную часть через промежуточную подвижную опору, выполненную в виде охватывающей поворотную часть рамки, соединенной с поворотной частью парой расположенных на противоположных сторонах рамки роликовых шарниров. Каждый роликовый шарнир представляет собой ряд цилиндрических роликов, перекатывающихся по цилиндрическим дорожкам, выпуклой, расположенной на поворотной части, и вогнутой, расположенной на промежуточной подвижной опоре. Промежуточная подвижная опора соединена с неподвижной частью аналогичной парой роликовых шарниров с выпуклыми дорожками на промежуточной подвижной опоре и с вогнутыми дорожками на неподвижной части. Изобретение позволяет снизить массу сопла ракетного двигателя твердого топлива за счет применения в качестве тел качения цилиндрических роликов. 3 ил.
Сопло ракетного двигателя на роликовой опоре, содержащее неподвижную часть, поворотную часть, резиновое уплотнительное кольцо, герметизирующее объем камеры сгорания по сферическому поясу на поворотной части, определяющему центр вращения последней, отличающееся тем, что поворотная часть опирается на неподвижную часть через промежуточную подвижную опору, выполненную в виде охватывающей поворотную часть рамки, соединенной с поворотной частью парой расположенных на противоположных сторонах рамки роликовых шарниров, каждый из которых представляет собой ряд цилиндрических роликов, перекатывающихся по цилиндрическим дорожкам, выпуклой, расположенной на поворотной части, и вогнутой, расположенной на промежуточной подвижной опоре, соединенной с неподвижной частью аналогичной парой роликовых шарниров с выпуклыми дорожками на промежуточной подвижной опоре и с вогнутыми дорожками на неподвижной части.
| US 6948307 B2, 27.09.2005 | |||
| US 3759446 A, 18.09.1973 | |||
| ПОВОРОТНОЕ УПРАВЛЯЮЩЕЕ СОПЛО РАКЕТНОГО ДВИГАТЕЛЯ | 2001 |
|
RU2195564C1 |
| US 3811713 A, 21.05.1974 | |||
| US 3046736 A, 31.07.1962. | |||

