Изобретение относится к ракетной технике и может быть использовано при создании управляющих сопел ракетных двигателей.
Известно сдвигаемое управляющее сопло (СУС), управляющий момент в котором создается вектором тяги за счет поступательного сдвига в радиальном направлении оси сопла относительно оси ракеты (патент США №3200587, вариант 3 с неподвижной камерой сгорания и сдвигаемым относительно нее соплом).
Известно поворотное управляющее сопло (ПУС) РДТТ на роликовой опоре (РО) (патент РФ №2666031).
Общим недостатком ПУС является потеря в импульсе вектора тяги за счет уменьшения его составляющей вдоль оси ракеты при поворотах сопла (см. В.И. Феодосьев Основы техники ракетного полета Изд. 2-е - М.: Наука, Главная редакция физико-математической литературы, 1981. - 496 с, стр. 291). А также, как отмечено в патенте США №3200587, неэффективность для управления той части потока газа, которая практически напрямую проходит вдоль тракта повернутого сопла (особенно сопла укороченного профиля), не успевая полностью изменить направление движения. Кроме этого, недостатком ПУС с РО (патент РФ №2666031) является присутствие в структуре шарнирного момента составляющей трения скольжения, обусловленной тем, что ролики не могут катиться без проскальзывания одновременно по двум контактным цилиндрическим поверхностям различной кривизны.
Недостатком СУС по патенту США №3200587, принятому за прототип, является использование упорного шарикового подшипника и скользящего по сдвигаемой поверхности уплотнительного резинового шнура. Здесь также имеет место трение скольжения, так как сдвигаемые части сопла прижаты друг к другу действием внутрикамерного давления, а шарики подшипника катятся только по плоскости подвижной части и скользят по поверхности паза, в который они утоплены, на неподвижной части. Кроме этого, контакт шариков и плоскости носит точечный характер, что приводит к высоким контактным напряжениям и требует большого количества шариков.
Техническая проблема изобретения заключается в разработке конструкции управляющего сопла ракетного двигателя без потерь в импульсе вектора тяги при создании управляющего момента и со значительно меньшей составляющей трения скольжения в управляющем усилии рулевого привода.
Технический результат заключается в том, что в предлагаемой конструкции СУС ракетного двигателя потери импульса и составляющая трения скольжения при создании управляющего момента существенно ниже за счет применения плоской роликовой опоры.
Технический результат достигается тем, что в сдвигаемом управляющем сопле ракетного двигателя, содержащем неподвижную часть, подвижную часть, герметизирующий тонкослойный резинометаллический элемент, соединенный с неподвижной частью по скользящей герметичной посадке, промежуточную подвижную опору в виде рамки, которая охватывает подвижную часть и содержит две пары симметрично расположенных относительно оси сопла роликовых дорожек, за счет перекатывания роликов по которым обеспечивается перемещение подвижной части сопла относительно рамки и самой рамки относительно неподвижной части сопла, при этом слои тонкослойного резинометаллического элемента и роликовые дорожки имеют плоскую форму и расположены перпендикулярно оси сопла, причем движение роликов синхронизируется установленными по их торцам жестко скрепленными с ними зубчатыми шестернями и двумя парами зубчатых реек, установленных по бокам вдоль соответствующих роликовых дорожек, при этом осевая сила воспринимается роликами, делительные окружности зубчатых шестерен совпадают с профилями роликов, и каждая шестерня находится в зацеплении одновременно с двумя зубчатыми рейками, расположенными напротив друг друга на сдвигаемых деталях.
Отличительный признак предлагаемого технического решения является существенным.
Применение плоских прямолинейных роликовых дорожек и плоских герметизирующих тонкослойных резинометаллических элементов перпендикулярных оси ракеты обеспечивает поступательное перемещение сдвигаемой части сопла в плоскости перпендикулярной оси ракеты. При этом прямолинейные плоские зубчатые рейки, расположенные попарно симметрично по бокам роликовых дорожек, и расположенные строго симметрично по торцам роликов и жестко скрепленные с ними зубчатые шестерни обеспечивают синхронность качения роликов без проскальзывания. Таким образом, поворот сопла и потери импульса, возникающие при повороте сопла, а также составляющая трения скольжения в усилии рулевого привода практически отсутствуют.
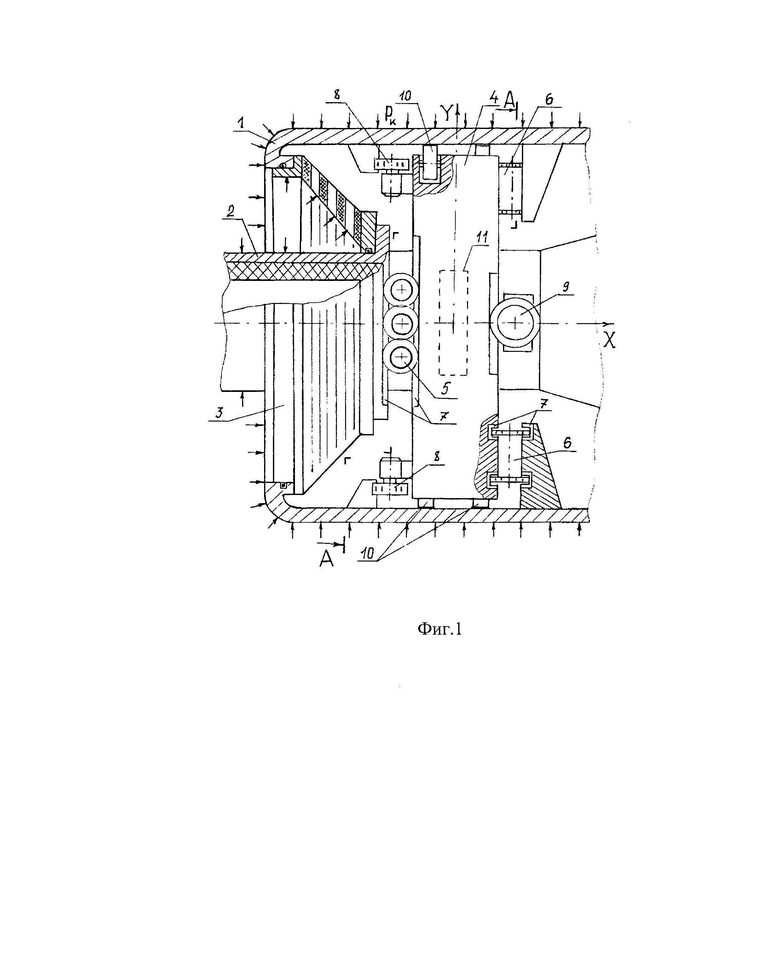
На фиг. 1 показана схема СУС ракетного двигателя и связанная с ним прямоугольная правая система координат XYZ.
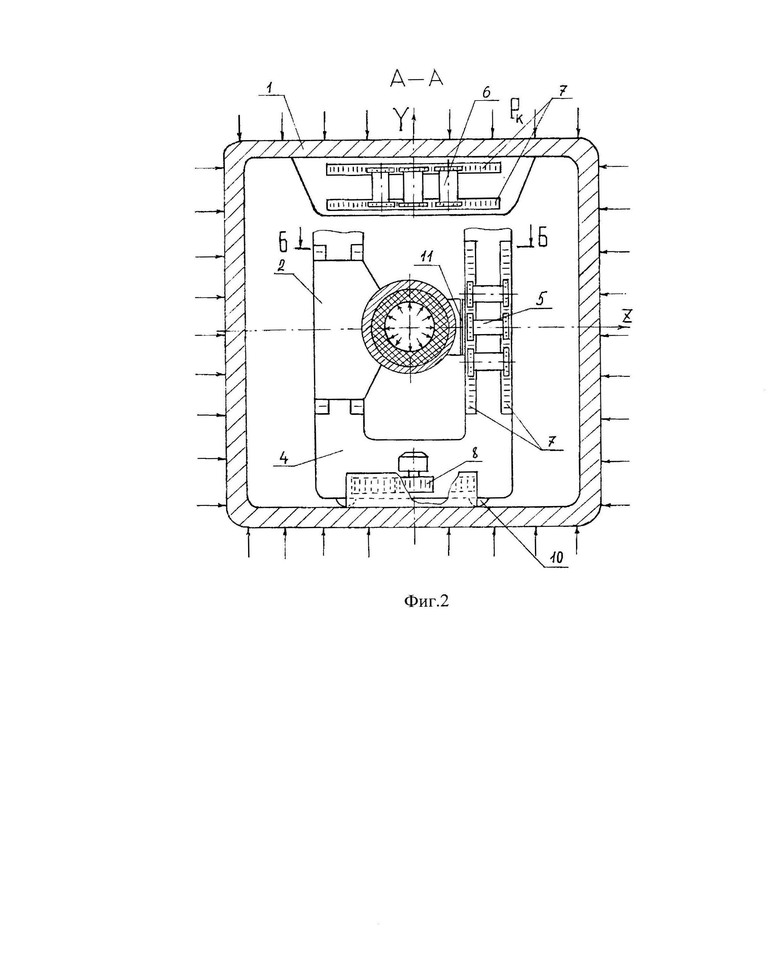
На фиг. 2 приведен показанный на фиг. 1 разрез А-А сопла плоскостью перпендикулярной продольной оси двигателя (оси ОХ).
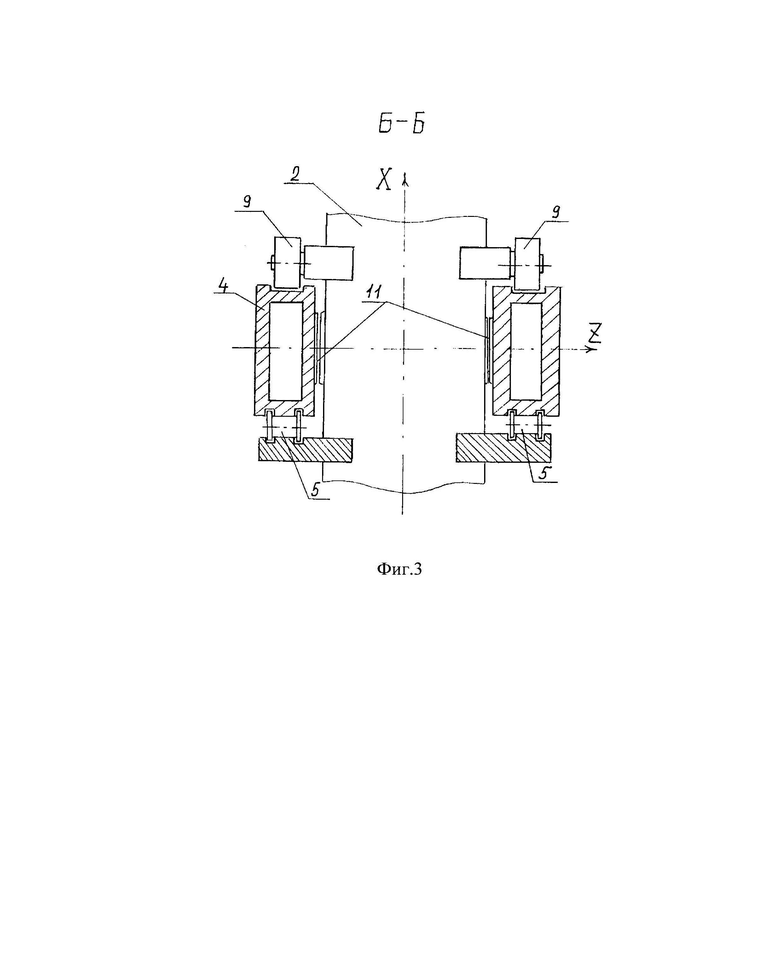
На фиг. 3 приведен показанный на фиг. 2 разрез Б-Б промежуточной подвижной опоры плоскостью перпендикулярной оси Y.
Стрелками обозначено давление внутри камеры двигателя PК⋅
На фиг. 1-3 приняты следующие обозначения:
1 - неподвижная часть сопла;
2 - подвижная часть сопла;
3 - герметизирующий плоский тонкослойный резинометаллический элемент;
4 - промежуточная подвижная опора;
5 - опорные ролики с синхронизирующими шестернями для
обеспечения движения подвижной части сопла 2 вдоль оси Y относительно промежуточной подвижной опоры 4;
6 - опорные ролики с синхронизирующими шестернями для обеспечения движения промежуточной подвижной опоры 4 вдоль оси Z относительно неподвижной части сопла 1;
7 - зубчатые рейки для синхронизации перекатывания соответствующих опорных роликов с зубчатыми шестернями 5 или 6;
8 - приводные шестерни с электродвигателем (2 шт. ) для перемещения промежуточной подвижной опоры 4 относительно неподвижной части сопла 1 вдоль оси Z по соответствующим зубчатым рейкам, жестко скрепленным с неподвижной частью сопла 1;
9 - приводные шестерни с электродвигателем (2 шт. ) для перемещения подвижной части сопла 2 относительно промежуточной подвижной опоры 4 вдоль оси Y по соответствующим зубчатым рейкам, жестко скрепленным с промежуточной подвижной опорой 4;
10 - ролики, центрирующие промежуточную подвижную опору 4 в направлении оси Y;
11 - центрирующие площадки внутри промежуточной подвижной опоры 4 для центрирования подвижной части сопла 2 в направлении оси Z.
Управляющий момент сопла создается за счет образования плеча вектора тяги относительно центра масс ракеты при поступательном перемещении оси подвижной части сопла 2 в плоскости перпендикулярной оси его неподвижной части 1, в результате чего поворот сопла и потери импульса, возникающие при повороте сопла, отсутствуют. В книге В.И. Феодосьева (см. выше) показано, что потери за счет отклонения вектора тяги пропорциональны коэффициенту 2sin2(δ/2), где δ - угол поворота сопла. Таким образом, если управляющим усилием будет вектор тяги параллельный оси ракеты с плечом равным расстоянию между ним и осью ракеты, то потери за счет отклонения вектора тяги будут нулевыми.
Также известно, что трение в механизмах управляющих сопел приводит к увеличению времени коррекции траектории полета ракеты, в результате чего потери возрастают. Применение плоских поверхностей для перекатывания опорных роликов 5, 6 в идеале исключает проскальзывание, а следовательно и трение скольжения в местах контакта, так как исключается различие в кривизне поверхностей, по которым перекатывание происходит одновременно. Также, по сравнению с конструкцией СУС прототипа, снижается количество тел качения в подшипнике за счет перехода к контактам по линии.
Для того, чтобы при виброударных нагрузках на СУС синхронность движения опорных роликов 5, 6 не нарушалась, на их торцах строго симметрично устанавливаются синхронизирующие зубчатые шестерни, жестко скрепленные с опорными роликами 5, 6, а вдоль плоских прямолинейных роликовых дорожек, между которыми зажаты опорные ролики 5, 6, также строго симметрично устанавливаются по две пары зубчатых реек 7 так, чтобы делительные окружности зубчатых шестерен совпадали с профилями опорных роликов 5, 6 (под профилем опорного ролика понимается окружность его цилиндрической контактной поверхности), и каждая шестерня опорных роликов 5, 6 находилась в зацеплении одновременно с двумя зубчатыми рейками 7, расположенными напротив друг друга на сдвигаемых деталях.
При этом параметры зубчатых шестерен у опорных роликов 5, 6 выбираются так, чтобы осевая сила на подвижную часть сопла 2 и на промежуточную подвижную опору 4 воспринималась только опорными роликами 5, 6. Тем, что диаметры шестерен опорных роликов 5, 6 по вершинам зубьев превышают диаметры самих опорных роликов, обеспечивается центрирование последних при перекатывании по роликовым дорожкам. Поскольку шестерни на опорных роликах 5, 6 не передают усилий (не являются приводными), то трение скольжения в зубчатых зацеплениях будет небольшим, чему также может способствовать смазка зацеплений.
Перемещение подвижной части сопла 2 относительно промежуточной подвижной опоры 4 вдоль оси Y осуществляется с помощью пары электродвигателей, жестко скрепленных с подвижной частью сопла 2, через зубчатые шестерни 9 по зубчатым рейкам, жестко скрепленным с промежуточной подвижной опорой 4.
Аналогичным образом, перемещение промежуточной подвижной опоры 4 относительно неподвижной части сопла 1 вдоль оси Z осуществляется с помощью пары электродвигателей, жестко скрепленных с промежуточной подвижной опорой 4, через зубчатые шестерни 8 по зубчатым рейкам, жестко скрепленным с неподвижной частью сопла 1.
Плоскопараллельное смещение вектора тяги по сравнению с его поворотом на угол δ может быть предпочтительнее при таких возмущающих факторах как несимметричный разгар критического сечения, отклонение положения центра масс ракеты от ее оси, при мягкой посадке отдельных ступеней при многоразовом их использовании.
Таким образом, предложена конструкция управляющего сопла ракетного двигателя, в котором отсутствуют потери в импульсе вектора тяги при создании управляющего момента, и значительно снижена составляющая трения скольжения в управляющем усилии рулевого привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сопло ракетного двигателя на роликовой опоре | 2017 |
|
RU2666031C1 |
| Сопло ракетного двигателя на цилиндрических эластичных шарнирах | 2019 |
|
RU2705496C1 |
| Шарнир сопла ракетного двигателя с усилением тарелей | 2021 |
|
RU2775760C1 |
| Сопло ракетного двигателя | 2017 |
|
RU2660983C1 |
| Стационарный миксер | 1991 |
|
SU1822419A3 |
| Рабочая клеть пилигримового стана холодной прокатки труб | 1975 |
|
SU580919A1 |
| ПУСКОВАЯ УСТАНОВКА ДЛЯ ОРУЖИЯ ТИПА ТОРПЕДЫ | 2006 |
|
RU2318174C1 |
| УСТРОЙСТВО ДЛЯ ПРОКАТКИ ТОНКИХ ЛИСТОВИ ЛЕНТ | 1972 |
|
SU422481A1 |
| Устройство для испытаний на прочность армирующих тарелей эластичного шарнира сопла ракетного двигателя на твердом топливе | 2019 |
|
RU2727211C1 |
| Автомат цепевязальный | 1980 |
|
SU925512A1 |
Изобретение относится к ракетной технике и может быть использовано при создании управляющих сопел ракетных двигателей. Предложена конструкция сдвигаемого управляющего сопла ракетного двигателя, в которой при создании управляющего момента значительно снижена составляющая трения скольжения в управляющем усилии рулевого привода. Для снижения трения предлагается использовать плоскую роликовую опору с промежуточной подвижной рамкой 4 и герметизирующим плоским тонкослойным резинометаллическим элементом 3, которые охватывают подвижную часть сопла 2 и обеспечивают перекатывание опорных роликов 5 при ее радиальном сдвиге относительно оси ракеты практически без проскальзывания. Для синхронизации перекатывания роликов 5 использованы жестко связанные с ними зубчатые шестерни и зубчатые рейки 7, расположенные симметрично относительно шестерен на сдвигаемых поверхностях. Каждая зубчатая шестерня ролика находится в зацеплении одновременно с двумя зубчатыми рейками 7, расположенными напротив друг друга на сдвигаемых деталях. 3 ил.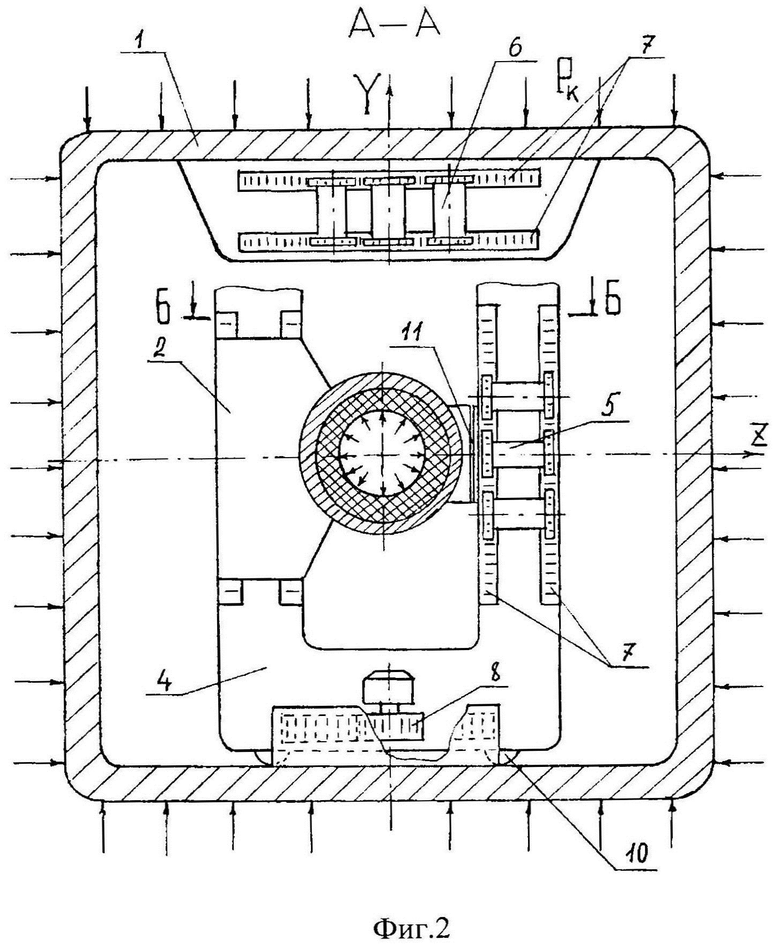
Сдвигаемое управляющее сопло ракетного двигателя, содержащее неподвижную часть, подвижную часть, герметизирующий тонкослойный резинометаллический элемент, соединенный с неподвижной частью по скользящей герметичной посадке, промежуточную подвижную опору в виде рамки, которая охватывает подвижную часть и содержит две пары симметрично расположенных относительно оси сопла роликовых дорожек, за счет перекатывания роликов по которым обеспечивается перемещение подвижной части сопла относительно рамки и самой рамки относительно неподвижной части сопла, отличающееся тем, что слои тонкослойного резинометаллического элемента и роликовые дорожки имеют плоскую форму и расположены перпендикулярно оси сопла, причем движение роликов синхронизируется установленными по их торцам жестко скрепленными с ними зубчатыми шестернями и двумя парами зубчатых реек, установленных по бокам вдоль соответствующих роликовых дорожек, при этом осевая сила воспринимается роликами, делительные окружности зубчатых шестерен совпадают с профилями роликов, и каждая шестерня находится в зацеплении одновременно с двумя зубчатыми рейками, расположенными напротив друг друга на сдвигаемых деталях.
| US 3200587 A1, 17.08.1965 | |||
| US 20080203189 A1, 28.08.2008 | |||
| US 5887821 A1, 30.03.1999 | |||
| СПОСОБ ПРОИЗВОДСТВА МОЧЕВИНЫ И РЕАКТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2078761C1 |
| Сопло ракетного двигателя на роликовой опоре | 2017 |
|
RU2666031C1 |
| Механизм линейного перемещения | 1991 |
|
SU1827684A1 |

