Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству распознавания сигнала регулирования движения, которое задает намечаемый целевым сигнал регулирования движения на дороге следования для собственного транспортного средства и распознает содержимое сигнала регулирования движения.
Известный уровень техники
[0002] Что касается данного типа устройства, то известно устройство, которое распознает состояние сигнала регулирования движения. Данное устройство предполагает область изображения, которая включает в себя изображение сигнала регулирования движения в захваченном изображении посредством камеры, на основе расстояния от собственного транспортного средства до перекрестка и информации о высоте сигнала регулирования движения. И данное устройство распознает содержимое сигнала регулирования движения на основе изображения области изображения сигнала регулирования движения (см. нижеследующий патентный документ 1).
Документ известного уровня техники
[Патентный документ]
[0003] [Патентный документ 1] Патент Японии № 3857698
Сущность изобретения
[Проблемы, решаемые изобретением]
[0004] Однако в случае когда на перекрестке обеспечивается несколько сигналов регулирования движения, могут иметь место некоторые проблемы. Например, может иметь место проблема, такая что изображение сигнала регулирования движения, которое не должно намечаться целевым собственным транспортным средством, захватывается в захватываемом изображении камерой на транспортном средстве. Может иметь место другая проблема, такая что не захватывается изображение сигнала регулирования движения, который следует наметить целевым. Эти проблемы могут зависеть от различия в ситуации из-за направления следования собственного транспортного средства, полос движения, направления следования или т.п. Поэтому способ согласно известному уровню техники имеет проблему в том, что собственное транспортное средство может ошибочно задать намечаемый целевым сигнал регулирования движения и неправильно распознать содержимое сигнала регулирования движения, представленное сигналом регулирования движения.
[0005] Задачей настоящего изобретения является обеспечение устройства распознавания сигнала регулирования движения, которое задает один сигнал регулирования движения, намечаемый целевым собственным транспортным средством, и распознает содержимое сигнала регулирования движения с высокой точностью, даже когда происходят проблемы такие, что изображение сигнала регулирования движения, который не следует наметить целевым, захватывается в захваченном изображении посредством камеры на транспортном средстве, или изображение сигнала регулирования движения, который следует наметить целевым, не захватывается в захваченном изображении посредством камеры на транспортном средстве.
Средства для решения проблем
[0006] Устройство распознавания сигнала регулирования движения настоящего изобретения ссылается на картографическую информацию для задания намечаемого целевым сигнала регулирования движения при следовании по следующему пути следования на основе пути следования, к которому принадлежит текущее положение собственного транспортного средства. Картографическая информация включает в себя данные пути следования и данные сигнала регулирования движения. Данные пути следования определяются для каждой полосы движения направленным путем. Данные пути следования включают в себя подсоединяемый путь и информацию о направлении следования, которые связаны друг с другом. Данные сигнала регулирования движения связаны с данными пути следования.
[Эффект изобретения]
[0007] Согласно настоящему изобретению картографическая информация включает в себя данные пути следования и данные сигнала регулирования движения, которые связаны друг с другом. Путь следования задается для каждой полосы движения посредством использования направленного пути, включающего в себя начальную точку, конечную точку и направление вперед или обратное направление, и путь следования связан с подсоединяемом путем и информацией о направлении следования. Данные сигнала регулирования движения включают в себя данные, касающиеся намечаемого целевым сигнала регулирования движения, при следовании по пути следования. Картографическая информация, таким образом, используется для задания намечаемого целевым сигнала регулирования движения при следовании по каждому пути следования. Поэтому даже в сложной дорожной ситуации, в которой обеспечивается несколько сигналов регулирования движения, один сигнал регулирования движения, намечаемый целевым водителем, может корректно задаваться на пути следования для собственного транспортного средства.
Краткое описание чертежей
[0008]
Фиг.1 представляет собой блок-схему системы поддержки вождения согласно варианту осуществления настоящего изобретения.
Фиг.2 представляет собой вид, изображающий пример картографической информации согласно настоящему варианту осуществления.
Фиг.3 представляет собой вид для описания дорожной ситуации, в которой обеспечивается несколько сигналов регулирования движения.
Фиг.4 представляет собой вид для описания процесса задания намечаемого целевым сигнала регулирования движения.
Фиг.5 представляет собой вид для описания определения момента времени процесса предположения для пути следования.
Фиг.6 представляет собой блок-схему последовательности операций, изображающую процедуру управления системы поддержки вождения согласно настоящему варианту осуществления.
Вариант(ы) осуществления изобретения
[0009] Ниже в данном документе описывается вариант осуществления настоящего изобретения с ссылкой на чертежи. Настоящий вариант осуществления приводит в качестве примера пример, в котором устройство распознавания сигнала регулирования движения согласно настоящему изобретению применяется в системе поддержки вождения.
[0010] Фиг.1 представляет собой блок-схему системы 1 поддержки вождения, содержащей устройство 100 распознавания сигнала регулирования движения согласно настоящему изобретению. Система 1 поддержки вождения и устройство 100 распознавания сигнала регулирования движения, включенное в нее, встроены в транспортное средство. Устройство 100 распознавания сигнала регулирования движения задает сигнал регулирования движения, намечаемый целевым водителем в собственном транспортном средстве, и распознает содержимое информации, представленной сигналом регулирования движения.
[0011] Система 1 поддержки вождения содержит устройство 100 распознавания сигнала регулирования движения, навигационное устройство 50, контроллер 60 транспортного средства и систему 70 привода, которая управляет приводом транспортного средства. Система 1 поддержки вождения управляет вождением/торможением собственного транспортного средства посредством контроллера 60 транспортного средства и системы 70 привода на основе содержимого сигнала, распознаваемого устройством 100 распознавания сигнала регулирования движения. Система 1 поддержки вождения предоставляет водителю собственного транспортного средства информацию поддержки для вождения при помощи навигационного устройства 50.
[0012] Как показано на фиг.1, устройство 100 распознавания сигнала регулирования движения настоящего варианта осуществления содержит устройство 10 управления, камеру 20, устройство 30 обнаружения положения и базу 40 данных.
[0013] Камера 20, которая установлена на собственном транспортном средстве, захватывает изображение вокруг собственного транспортного средства. Например, камера 20 представляет собой камеру, которая включает в себя элемент захвата изображения, такой как прибор с зарядовой связью (CCD). Используемым в ней объективом может быть телеобъектив, имеющий узкий угол обзора, способный захватывать изображение удаленного предшествующего транспортного средства. Объективом также может быть объектив типа «рыбий глаз», имеющий широкое поле обзора, чтобы реагировать на изгиб и изменение наклона. Также может использоваться объектив для всенаправленных камер, которые могут захватывать изображения круговых видов. Положение, в котором закрепляется камера 20, не ограничивается, но в настоящем варианте осуществления камера 20 обеспечивается обращенной вперед вблизи внутреннего зеркала заднего вида собственного транспортного средства. Ниже описывается пример, в котором используется стандартный объектив, имеющий угол обзора около 25°-50°. Информация 42 о свойствах захвата изображения, которая включает в себя внутренние параметры, такие как дисторсия объектива камеры 20, и внешние параметры, которые представляют положение прикрепления к транспортному средству, может предварительно сохраняться в постоянном запоминающем устройстве (ROM).
[0014] Камера 20 в настоящем варианте осуществления имеет функцию изменения масштаба изображения, которая увеличивает и уменьшает кратность увеличения захвата изображения при захвате изображения. Функция изменения масштаба изображения в настоящем варианте осуществления включает в себя функцию управления кратностью увеличения захвата изображения, управляемую на основе отношения поверхности области изображения заданного сигнала регулирования движения относительно захваченного изображения, которая описывается ниже.
[0015] Камера 20 в настоящем варианте осуществления включает в себя механизм 21 перемещения. Механизм 21 перемещения может изменять направление формирования изображения камеры 20. Механизм 21 перемещения в настоящем варианте осуществления имеет функцию приведения в движение, и камера 20 может приводиться в движение в вертикальном направлении собственного транспортного средства посредством функции приведения в движение. Механизм 21 перемещения может быть выполнен в виде поддерживающего устройства, отдельного от камеры 20. Камера 20, используемая в настоящем варианте осуществления, представляет собой камеру с интегрированным механизмом перемещения, такую как камера PTZ (камера, способная выполнять панорамирование/наклон/изменение масштаба изображения), которая имеет механизм для приведения во вращательное движение корпуса камеры. Камера 20 может представлять собой, но конкретно не ограничивается ей, камеру PTZ, расположенную на верхней поверхности приборной панели в собственном транспортном средстве, так что камера может захватывать изображение, наблюдаемое впереди собственного транспортного средства. Определенный вид механизма 21 перемещения конкретно не ограничивается, и может применяться способ обеспечения зеркала перед элементом захвата изображения и приведение зеркала в движение, изменяя им направление формирования изображения. Внешние параметры, включающие в себя положение прикрепления камеры 20 к транспортному средству, и другие параметры, включающие в себя величину изменения положения прикрепления камеры 20 вследствие работы механизма 21 перемещения, могут предварительно вычисляться и сохраняться в базе 40 данных. Механизм 21 перемещения в настоящем варианте осуществления изменяет направление формирования изображения камеры 20 на основе положения области изображения заданного сигнала регулирования движения относительно захваченного изображения.
[0016] Устройство 30 обнаружения положения, которое содержит систему глобального позиционирования (GPS), обнаруживает текущее положение (широту/долготу) транспортного средства, которое движется. Текущее положение собственного транспортного средства может получаться от устройства 30 обнаружения положения, включенного в навигационное устройство 50, которое установлено в собственном транспортном средстве. Устройство 30 обнаружения положения в настоящем варианте осуществления имеет функцию обнаружения пространственного расположения собственного транспортного средства. Чтобы обнаруживать пространственное расположение собственного транспортного средства, устройство 30 обнаружения положения может содержать два приемника GPS и может вычислять направление собственного транспортного средства. Устройство 30 обнаружения положения дополнительно может содержать измеритель азимута для вычисления направления собственного транспортного средства.
[0017] Устройство 30 обнаружения положения может вычислять пространственное расположение собственного транспортного средства на основе захваченного изображения посредством камеры 20. В примере описывается способ вычисления пространственного расположения собственного транспортного средства на основе захваченного изображения. Когда собственное транспортное средство следует по прямой дороге, точка обзора для захваченного изображения посредством камеры 20 устанавливается над транспортным средством, и захваченное изображение преобразуется в изображение вида с высоты птичьего полета, в котором собственное транспортное средство просматривается с точки обзора над транспортным средством. Если линии (разделительные полосы) или бордюры распознаются на изображении вида с высоты птичьего полета, наклон линий или бордюров может использоваться для вычисления направления движения транспортного средства. Положение/пространственное расположение собственного транспортного средства может вычисляться с использованием мгновенной визуальной локализации и ориентирования (SLAM), который представляет собой метод предположения самолокализации, использующий изображение, и который был известен в технике на момент подачи настоящей заявки. Конкретно, трехмерные положения характерных точек изображения могут предварительно сохраняться в базе 40 данных, и характерные точки изображения в захваченном изображении посредством камеры 20 могут сравниваться для проверки с характерными точками изображения, хранимыми в базе 40 данных, таким образом вычисляя положение/пространственное расположение собственного транспортного средства.
[0018] База 40 данных хранит картографическую информацию 41. Картографическая информация 41 может альтернативно храниться в навигационном устройстве 50, к которому может обращаться устройство 10 управления. Картографическая информация 41 в настоящем варианте осуществления включает в себя данные 411 пути следования и данные 412 сигнала регулирования движения, которые ассоциируются с данными 411 пути следования.
[0019] Каждый путь следования в данных 411 пути следования определяется для каждой полосы движения посредством направленного пути, который включает в себя начальную точку, конечную точку и направление вперед или обратное направление. Направленный путь определяется по меньшей мере начальной точкой и конечной точкой (т.е. длиной) и информацией о направлении. Каждый путь следования (направленный путь) в настоящем варианте осуществления дополнительно связан с подсоединяемым путем, который подсоединяется к каждой из начальной точки и конечной точки, и также связан с информацией о направлении следования, которая задает направление следования, включая прямо вперед или правый поворот или левый поворот. Кроме того, данные сигнала регулирования движения связаны с путем следования. Данные сигнала регулирования движения представляют собой данные, которые включают в себя информацию о положении сигнала регулирования движения, намечаемого целевым водителем при следовании по каждому пути следования.
[0020] Фиг.2 изображает пример картографической информации 41. Как показано на фиг.2, картографическая информация 41 в настоящем варианте осуществления включает в себя:
точки, причем каждая задается значениями координат карты, такими как широта и долгота, в качестве обычной картографической информации;
узлы, причем каждому назначается идентификатор (ID);
пути следования, причем каждому назначается идентификатор (ID);
сигналы регулирования движения, причем каждому назначается идентификатор (ID); и
информацию о точках интереса (POI), связанную с каждой точкой.
Информация об узле задается значениями координат карты и имеет идентификатор узла, подлежащий связыванию с узлом и идентификаторами узлов ответвляемых частей. Узел может устанавливаться в центре направления ширины полосы движения, но на сложном перекрестке и т.п., имеющем множество полос движения, положение узла может определяться с использованием траектории, по которой фактически следовало транспортное средство.
[0021] Данные пути следования включают в себя:
идентификатор узла, который определяется значениями координат карты и определяет начальную и конечную точки;
направление следования, такое как прямая линия, правый поворот и левый поворот, каждого пути следования;
категоризацию каждого пути следования, т.е. является ли путь следования путем объединения или путем ответвления (путь, подлежащий объединению, или путь, подлежащий ответвлению); и
идентификатор другого пути следования, который подсоединяется к пути следования; и
идентификаторы множества путей следования на ответвляемых частях.
Идентификатор намечаемого целевым сигнала регулирования движения связан с каждым путем следования. Данным пути следования в настоящем варианте осуществления назначается разный ID для каждой полосы движения, даже когда полосы присутствуют на одной и той же дороге, и рассматриваются как разные пути следования. Это позволяет путь следования для правого поворота и путь следования для движения прямо вперед обрабатывать в качестве разных путей следования даже на одной и той же дороге. Таким образом, даже когда информация о начальной точке и конечной точке одинаковая, сигнал регулирования движения, намечаемый целевым на пути следования для правого поворота, и сигнал регулирования движения, намечаемый целевым на пути следования для движения прямо вперед, являются разными и поэтому сохраняются в качестве разных информационных элементов. Согласно настоящему варианту осуществления пути следования определяются как разные пути следования, когда дорога следования для транспортных средств ответвляется, или дороги следования пересекаются друг с другом и когда являются разными намечаемые целевым сигналы регулирования движения. Т.е., в информации пути следования согласно настоящему варианту осуществления путь следования определяется для каждой полосы движения, и один намечаемый целевым сигнал регулирования движения связывается с одним путем следования. Поэтому даже когда обеспечивается несколько сигналов регулирования движения на одной и той же дороге следования, несколько сигналов регулирования движения не связываются с одним путем следования в данных пути следования согласно настоящему варианту осуществления. Когда путь следования определяется для следования собственного транспортного средства, намечаемый целевым сигнал регулирования движения может однозначно задаваться, так как один намечаемый целевым сигнал регулирования движения связывается с одним путем следования, который определяется для каждой полосы движения.
[0022] Данные сигнала регулирования движения включают в себя:
информацию о высоте;
положение установки, задаваемое значениями координат карты;
идентификатор пути следования, имеющего сигнал регулирования движения, намечаемый целевым транспортным средством, которое следует по пути следования, т.е. идентификатор пути следования, который управляется сигналом регулирования движения; и
информацию о категоризации сигнала регулирования движения.
Информация о категоризации сигнала регулирования движения, как она упоминается в данном документе, представляет собой информацию, что сигнал регулирования движения представляет собой сигнал регулирования движения, который отображает красный цвет, желтый цвет или зеленый цвет, сигнал регулирования движения представляет собой сигнал регулирования движения, который отображает красный цвет или зеленый цвет для пешеходов, или сигнал регулирования движения представляет собой сигнал регулирования движения, который отображает стрелками правый и левый повороты.
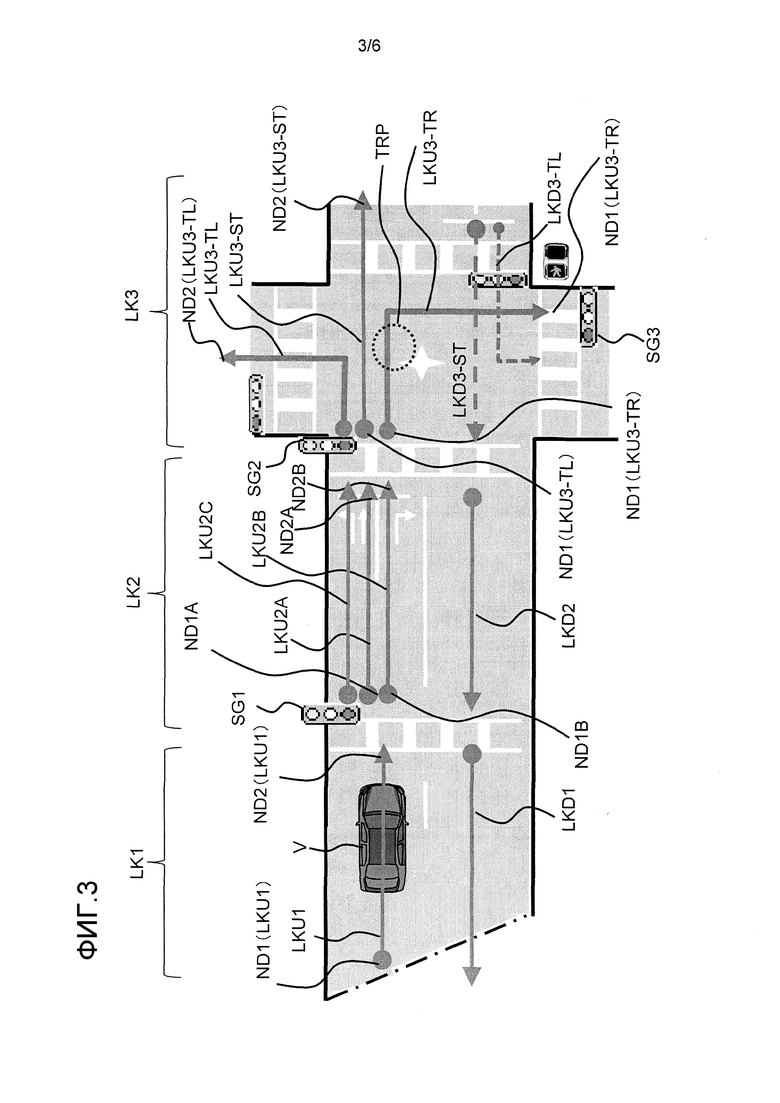
[0023] Фиг.3 представляет собой вид, изображающий примеры данных пути следования и данных сигнала регулирования движения на фактическом перекрестке. Как показано на фиг.3, путь LKD1 следования устанавливается для дороги, на которой присутствует путь LKU1 следования для следования собственного транспортного средства V. В данном случае, путь LKU1 следования представляет собой путь следования для полосы вперед, тогда как путь LKD1 следования представляет собой путь следования для обратной полосы, и обоим назначаются разные идентификаторы в качестве разных путей следования. На стороне направления следования пути LKU1 следования для следования собственного транспортного средства представлены три пути LKU2A, LKU2B и LKU2C следования, которые подсоединяются к пути LKU 1 следования в узле ND2. Путь LKU2A следования представляет собой путь следования для полосы прямо вперед, путь LKU2B следования представляет собой путь следования для полосы правого поворота, и путь LKU2C следования представляет собой путь следования для полосы левого поворота. Пути LKU2A и LKU2C следования определяются как разные пути следования, так как являются разными подсоединяемые пути, связанные с ними.
[0024] Как показано на фиг.4, если смотреть вперед из собственного транспортного средства V, показанного на фиг.3, как сигнал SG1 регулирования движения, так и сигнал SG2 регулирования движения одновременно попадают в поле обзора (область захвата изображения). Может быть трудным определить, какой сигнал регулирования движения собственное транспортное средство V должно наметить своим целевым. В такой ситуации ошибочный процесс может возможно выполняться (может ошибочно задаваться сигнал регулирования движения, который не должен намечаться целевым), такой как зависящий от метода распознавания изображения, в процессе задания любого одного из сигналов регулирования движения. Отметьте, что ось Z, показанная на фиг.4, представляет собой направление формирования изображения.
[0025] Хотя подробности описаны ниже, может задаваться намечаемый целевым сигнал SG1 регулирования движения, и область R изображения, включающая в себя этот сигнал SG1 регулирования движения, может выделяться даже тогда, когда два сигнала регулирования движения одновременно включаются в область захвата изображения, как показано на фиг.4. Это потому, что устройство 100 распознавания сигнала регулирования движения согласно настоящему варианту осуществления выполнено так, что путь следования связан с каждым намечаемым целевым сигналом регулирования движения, и в примере, показанном на фиг.3, только сигнал SG1 регулирования движения связан с путем LKU1 следования для собственного транспортного средства V.
[0026] Другими словами, согласно настоящему варианту осуществления один намечаемый целевым сигнал регулирования движения может задаваться для одного пути следования посредством ссылки на данные пути следования и данные сигнала регулирования движения даже в ситуации, в которой несколько сигналов регулирования движения обеспечивается на перекрестке для усложнения дорожной ситуации. Ниже в данном документе описание относится к способу распознавания сигнала регулирования движения согласно настоящему варианту осуществления, который задает один намечаемый целевым сигнал регулирования движения и распознает содержимое, представленное этим сигналом регулирования движения.
[0027] Устройство 10 управления устройства 100 распознавания сигнала регулирования движения, которое задает намечаемый целевым сигнал регулирования движения, представляет собой компьютер, содержащий постоянное запоминающее устройство (ROM) 12, которое хранит программу для распознавания содержимого информации, представленной сигналом регулирования движения; центральный блок 11 обработки (CPU), в качестве рабочей схемы, которая исполняет программу, хранимую в ROM, чтобы функционировать в качестве устройства 100 распознавания сигнала регулирования движения; и оперативное запоминающее устройство (RAM) 13, которое функционирует в качестве запоминающего устройства, к которому может выполняться доступ.
[0028] Устройство 10 управления устройства 100 распознавания сигнала регулирования движения согласно настоящему варианту осуществления имеет функцию получения захваченного изображения, функцию получения положения собственного транспортного средства, функцию задания целевого сигнала регулирования движения, функцию выделения области изображения сигнала регулирования движения и функцию распознавания содержимого сигнала регулирования движения. Устройство 10 управления в настоящем варианте осуществления исполняет каждую функцию посредством программного обеспечения для реализации вышеупомянутых функций вместе с вышеописанным аппаратным обеспечением.
[0029] Ниже описывается каждая функция, исполняемая устройством 100 распознавания сигнала регулирования движения, согласно настоящему варианту осуществления.
[0030] Сначала описывается функция получения захваченного изображения, исполняемая устройством 10 управления, согласно настоящему варианту осуществления. Устройство 10 управления получает захваченное изображение вокруг собственного транспортного средства, захваченное камерой 20.
[0031] Затем описывается функция получения положения собственного транспортного средства, исполняемая устройством 10 управления, согласно настоящему варианту осуществления. Устройство 10 управления получает текущее положение собственного транспортного средства, обнаруженное устройством 30 обнаружения положения. Устройство 10 управления также получает, если она есть, информацию о пространственном расположении вокруг собственного транспортного средства, обнаруженную устройством 30 обнаружения положения.
[0032] Функция задания устройства целевого сигнала регулирования движения, исполняемая устройством 10 управления, представляет собой функцию для ссылки на картографическую информацию 41 и для задания намечаемого целевым сигнала регулирования движения посредством использования информации о пути следования, к которому принадлежит текущее положение собственного транспортного средства. Устройство 10 управления предполагает путь следования для следования собственного транспортного средства, используя данные пути следования, полученные из картографической информации 41, и текущее положение собственного транспортного средства, полученное от устройства обнаружения положения. Устройство 10 управления предполагает путь следования, связанное с точкой или областью, к которой принадлежит текущее положение собственного транспортного средства, в качестве пути следования для следования собственного транспортного средства. Устройство 10 управления может предполагать путь следования, отделенный от текущего положения собственного транспортного средства на минимальное расстояние (ближайший путь следования) в качестве пути следования для следования собственного транспортного средства. Когда получено пространственное расположение, включающее в себя направление следования собственного транспортного средства, путь следования, на котором разность между направлением следования собственного транспортного средства и направлением вектора, направленного из начальной точки пути следования к конечной точке, не превышает заданного порога, например, 90°, и расстояние от текущего положения является минимальным (т.е. ближайший путь следования), может предполагаться в качестве пути следования для следования собственного транспортного средства.
[0033] Когда данные пути следования включают в себя информацию о подсоединяемых путях, которые подсоединяются к пути следования (каждый из которых должен быть проездом), возможные варианты пути следования для последующего следования сужаются до подсоединяемых путей, которые подсоединяются к текущему пути следования. Поэтому из числа путей следования, суженных до возможных вариантов, может выбираться путь следования, отделенный от текущего положения на минимальное расстояние, в качестве следующего пути следования для последующего следования. Это позволяет выполнять корректное предположение о пути следования для следования собственного транспортного средства, даже в сложной дорожной ситуации, в которой намечаемый целевым сигнал регулирования движения является разным для каждого подсоединяемого пути в качестве проезда, к которому затем направится собственное транспортное средство. Таким образом, может точно предполагаться путь следования для правого поворота собственного транспортного средства на перекрестке и путь следования для движения прямо вперед собственного транспортного средства на перекрестке.
[0034] Устройство 10 управления в настоящем варианте осуществления ссылается на данные 411 пути следования картографической информации 41 для следования собственного транспортного средства и вычисляет следующий путь следования для последующего следования, когда определяется, что собственное транспортное средство достигло конечной точки пути следования. Конкретно, когда расстояние между собственным транспортным средством и конечной точкой направленного пути, связанного с путем следования, станет меньше заданного значения, устройство 10 управления ссылается на данные 411 пути следования и вычисляет подсоединяемый путь, который подсоединяется к конечной точке пути следования, к которому принадлежит текущее положение собственного транспортного средства.
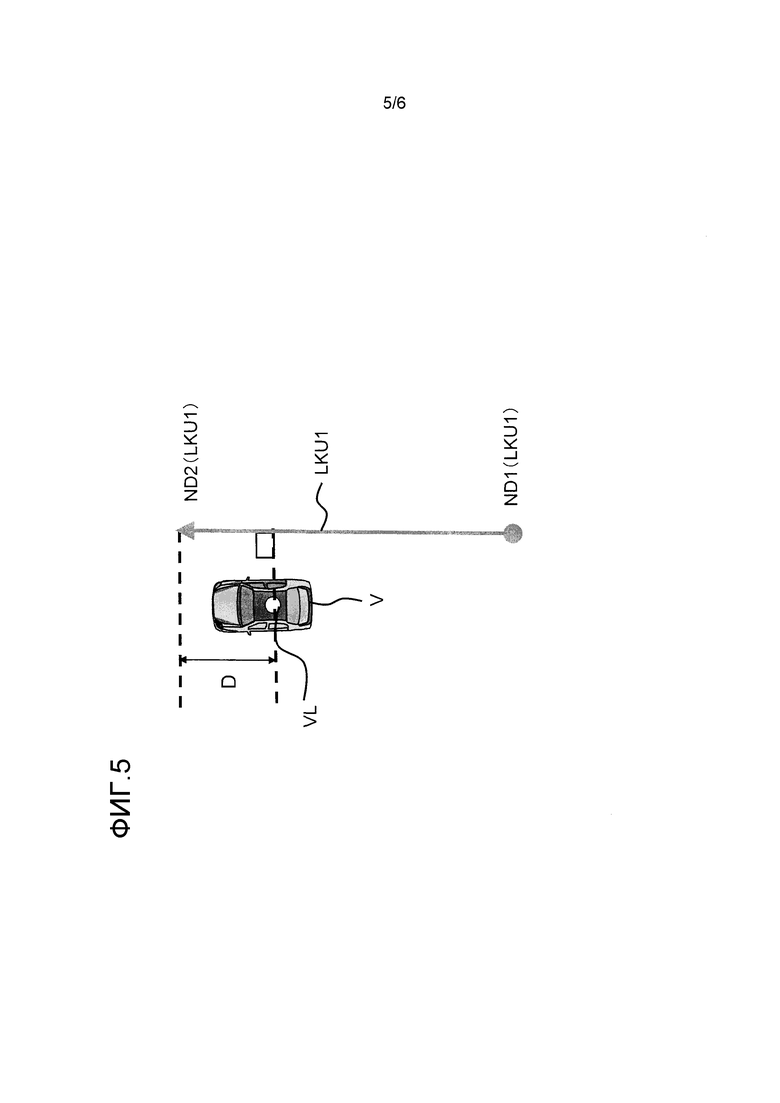
[0035] Более конкретно, как показано на фиг.5, расстояние до узла конечной точки вычисляется в сравнении с вектором, направленным из начальной точки к конечной точке пути следования. И, когда расстояние D от узла ND2 конечной точки пути LKU1 следования до текущего положения VL собственного транспортного средства V становится меньше заданного значения, устройство 10 управления предполагает следующий путь следования для последующего следования собственного транспортного средства V в момент времени, когда собственное транспортное средство V достигнет конечной точки пути LKU1 следования.
[0036] Устройство 10 управления в настоящем варианте осуществления ссылается на данные 411 пути следования и/или данные 412 сигнала регулирования движения, которые связаны друг с другом, в картографической информации 41, и задает намечаемый целевым сигнал регулирования движения, который связан с предполагаемым путем следования для собственного транспортного средства. Устройство 10 управления идентифицирует ID пути следования для следования собственного транспортного средства и ссылается на данные 412 сигнала регулирования движения, связанные с ID пути следования в данных 411 пути следования, таким образом задавая сигнал регулирования движения, намечаемый целевым собственным транспортным средством при следовании по пути следования. Кроме того, устройство 10 управления получает, из данных 412 сигнала регулирования движения, трехмерную информацию о положении, такую как положение установки и высота заданного сигнала регулирования движения и его тип, и т.д.
[0037] Ниже описывается функция выделения области изображения сигнала регулирования движения, исполняемая устройством 10 управления. Устройство 10 управления выделает область изображения сигнала регулирования движения из захваченного изображения посредством камеры 20 на основе информации о положении заданного сигнала регулирования движения и информации 42 о свойствах захвата изображения о камере 20. Устройство 10 управления вычисляет относительное взаимное расположение сигнала регулирования движения, основываясь на камере 20, используя геометрическое соотношение, из положения собственного транспортного средства, полученного функцией получения положения собственного транспортного средства, трехмерной информации о положении намечаемого целевым сигнала регулирования движения, который задается функцией задания сигнала регулирования движения, и внешних параметров (информации 42 о свойствах захвата изображения), которая включает в себя информацию о положении прикреплении камеры 20 к собственному транспортному средству.
[0038] Устройство 10 управления в настоящем варианте осуществления выделяет область изображения, соответствующую изображению сигнала регулирования движения из захваченного изображения, учитывая пространственное расположение собственного транспортного средства, обнаруженное функцией получения положения собственного транспортного средства. Таким образом, пространственное расположение собственного транспортного средства также учитывается им, позволяя выполнять точное выделение области изображения, в которой находится изображение сигнала регулирования движения. Конкретная обработка не ограничивается, но может быть разработано так, что выполняется преобразование координат в соответствии с пространственным расположением собственного транспортного средства для получения области изображения сигнала регулирования движения из захваченного изображения, когда изображение сигнала регулирования движения захватывается в текущем пространственном расположении собственного транспортного средства.
[0039] Когда функция получения положения собственного транспортного средства получает только положение собственного транспортного средства, т.е. когда информация о пространственном расположении собственного транспортного средства не может быть получена, устройство 10 управления может использовать направление следования пути следования для следования собственного транспортного средства в качестве пространственного расположения собственного транспортного средства. В данном случае, устройство 10 управления может вычислять пространственное расположение транспортного средства посредством использования направления следования пути следования. Например, на пути следования, имеющем изгиб, такой как правый поворот и левый поворот, пространственное расположение транспортного средства в узле начальной точки и пространственное расположение транспортного средства в узле конечной точки предварительно включаются в данные пути следования картографической информации 41, и устройство 10 управления вычисляет расстояния от положения собственного транспортного средства до узла начальной точки и узла конечной точки пути следования. Эти вычисленные расстояния, которые отражают процент продвижения собственного транспортного средства по пути следования, могут использоваться для вычисления изменения пространственного расположения транспортного средства в каждом положении от узла начальной точки до узла конечной точки пути следования устройством 10 управления.
[0040] Как ранее описано, механизм 21 перемещения для камеры 20 изменяет направление формирования изображения камеры 20 на основе положения области изображения сигнала регулирования движения на захваченном изображении. Что касается положения области изображения сигнала регулирования движения, используемого при изменении направления формирования изображения камеры 20, является предпочтительным, что вычисляется не только информация о взаимном расположении сигнала регулирования движения, основанная на текущем положении камеры 20, но также информация о следовании собственного транспортного средства, такая как скорость транспортного средства и степень отклонения от направления следования собственного транспортного средства, и оцененное время, требуемое для процесса вычисления области изображения сигнала регулирования движения, принимаются во внимание для вычисления области изображения сигнала регулирования движения, который может задаваться в последующем промежутке времени. Информация о следовании собственного транспортного средства получается от контроллера 60 транспортного средства. После предсказания области изображения сигнала регулирования движения при выполнении последующего процесса задания сигнала регулирования движения, механизм 21 перемещения регулирует направление формирования изображения камеры 20 так, что камера 20 может захватывать предсказанную область изображения сигнала регулирования движения. Это позволяет корректно выполнять последующее задание сигнала регулирования движения.
[0041] Также как описано ранее, камера 20 изменяет кратность увеличения захвата изображения камеры 20 на основе отношения области изображения сигнала регулирования движения относительно захваченного изображения. Что касается отношения, занимаемого областью изображения сигнала регулирования движения, относительно всей области захваченного изображения, причем это отношение используется при изменении кратности увеличения захвата изображения камеры 20, является предпочтительным, что вычисляется не только информация о взаимном расположении сигнала регулирования движения на основе текущего положения камеры 20, но также учитывается информация о следовании собственного транспортного средства, такая как скорость транспортного средства и степень отклонения от направления следования собственного транспортного средства, и оцененное время, требуемое для процесса вычисления области изображения сигнала регулирования движения, для вычисления области изображения сигнала регулирования движения, который может задаваться в последующий промежуток времени. После предсказания области изображения сигнала регулирования движения при выполнении последующего процесса задания сигнала регулирования движения, механизм 21 перемещения регулирует кратность увеличения захвата изображения камеры 20, так что камера 20 может четко захватывать предсказанную область изображения сигнала регулирования движения. Это позволяет корректно выполнять последующее распознавание содержимого сигнала регулирования движения, представленного сигналом регулирования движения.
[0042] Устройство 10 управления выделяет область изображения на захваченном изображении (область изображения сигнала регулирования движения), в которой присутствует изображение заданного сигнала регулирования движения, используя относительное положение сигнала регулирования движения, основанного на камере 20 и внутренних параметрах (информации 42 о свойствах захвата изображения), включающих в себя информацию о дисторсии объектива, касающуюся камеры 20. Координата центра области изображения сигнала регулирования движения может быть получена выполнением преобразование проекции для трехмерных координат центральной части сигнала регулирования движения (например, центральной части желтого света в случае сигнала регулирования движения типа красный-желтый-зеленый) в систему координат захваченного изображения посредством камеры 20. Размер области изображения сигнала регулирования движения может устанавливаться на любой фиксированный размер или может устанавливаться в соответствии с типом сигнала регулирования движения, или размер может изменяться в соответствии с расстоянием от собственного транспортного средства до сигнала регулирования движения. Хотя конкретно не ограничивается, область изображения сигнала регулирования движения может устанавливаться большей, когда больше расстояние до сигнала регулирования движения, и область изображения сигнала регулирования движения может устанавливаться меньшей, когда уменьшается расстояние до сигнала регулирования движения, так что размер области изображения сигнала регулирования движения на захваченном изображении попадает в заданную область. Размер области изображения сигнала регулирования движения может изменяться в соответствии с точностью обнаружения устройства 30 обнаружения положения в собственном транспортном средстве.
[0043] Наконец, описывается функция распознавания содержимого сигнала регулирования движения, исполняемая устройством 10 управления в настоящем варианте осуществления. Устройство 10 управления в настоящем варианте осуществления распознает содержимое сигнала регулирования движения, представленное сигналом регулирования движения, на основе изображения сигнала регулирования движения, включенного в выделенную область изображения. Устройство 10 управления выполняет процесс распознавания содержимого сигнала регулирования движения, представленного сигналом регулирования движения, для области изображения сигнала регулирования движения, выделенного функцией распознавания содержимого сигнала регулирования движения, и получает информацию, представленную сигналом регулирования движения. Процесс распознавания содержимого сигнала регулирования движения, представленного сигналом регулирования движения, конкретно не ограничивается, но может быть выполнен с возможностью: предварительного сохранения шаблонного изображения для каждого элемента информации, представленного сигналом регулирования движения; выполнения сравнения с шаблоном, известного, как правило, в области обработки изображений, для конкретного задания области изображения сигнала регулирования движения; и, после этого, проверки посредством распознавания цвета, состояния освещения каждого сигнала регулирования движения (например, красный/желтый/зеленый), представленного сигналом регулирования движения для распознавания цвета освещения в качестве информации, представленной сигналом регулирования движения. Способ распознавания содержимого сигнала регулирования движения конкретно не ограничивается, и может использоваться соответственно любой способ, который известен в технике на момент подачи настоящей заявки.
[0044] Ниже описывается процедура управления в устройстве 100 распознавания сигнала регулирования движения согласно настоящему варианту осуществления с ссылкой на блок-схему последовательности операций на фиг.6. Устройство 10 управления, имеющее функцию распознавания сигнала регулирования движения, последовательно выполняет процесс, изображенный на фиг.6, в заданный временной интервал, например, около 50 мс.
[0045] Как показано на фиг.6, устройство 10 управления получает на этапе S110 текущее положение собственного транспортного средства, обнаруженное устройством 30 обнаружения положения.
[0046] На этапе S120 устройство 10 управления определяет, достигло ли собственное транспортное средство узла конечной точки пути следования на основе положения собственного транспортного средства, которое было получено на этапе S110, и информации о пути следования, которая была определена в предыдущей обработке, по которому следовало собственное транспортное средство (полученное положение транспортного средства, принадлежащее ему). Используемый в данном случае способ определения может представлять собой способ, описанный с ссылкой на фиг.5. Если определяется, что собственное транспортное средство достигло узла конечной точки, подпрограмма переходит на этап S130, тогда как, если определяется, что собственное транспортное средство не достигло узла конечной точки, подпрограмма продолжает обработку на этапах S110 и S120.
[0047] На этапе S130 устройство 10 управления вычисляет путь следования для следования собственного транспортного средства на основе текущего положения собственного транспортного средства, полученного на этапе S110, и данных 411 пути следования, включенных в картографическую информацию 41, и подпрограмма переходит на этап S140.
[0048] На этапе S140 устройство 10 управления использует идентификатор (ID) пути следования, вычисленного на этапе S130, и картографическую информацию 41 для задания намечаемого целевым сигнала регулирования движения на основе пути следования, к которому принадлежит текущее положение собственного транспортного средства.
[0049] На этапе S150 устройство 10 управления вычисляет относительное положение сигнала регулирования движения относительно камеры 20 посредством использования: информации о положении, полученной со ссылкой на данные 412 сигнала регулирования движения картографической информации 41, сигнала регулирования движения, заданного на этапе S140; текущего положения собственного транспортного средства, полученного на этапе S110; и внешних параметров (информации 42 о свойствах захвата изображения) камеры 20, прикрепленной к собственному транспортному средству.
[0050] На этапе S160 устройство 10 управления выделяет область изображения сигнала регулирования движения из захваченного изображения посредством камеры 20 на основе информации о положении заданного сигнала регулирования движения и информации 42 о свойствах захвата изображения о камере 20.
[0051] На этапе S170 устройство 10 управления распознает содержимое сигнала регулирования движения для сигнала регулирования движения на основе изображения сигнала регулирования движения в области изображения.
[0052] На этапе S180 устройство 10 управления посылает сигнал результата распознавания на навигационное устройство 50, контроллер 60 транспортного средства или систему 70 привода. Эти установленные на транспортном средстве устройства выполняют поддержку вождения в соответствии с содержимым сигнала регулирования движения, представленным сигналом регулирования движения. Хотя конкретно не ограничивается, система 1 поддержки вождения согласно настоящему варианту осуществления может выполнять управление для уменьшения скорости собственного транспортного средства при распознавании знака остановки или предупреждающего знака, отображаемого сигналом регулирования движения. Когда распознается знак остановки или предупреждающий знак, отображаемый сигналом регулирования движения, система 1 поддержки вождения согласно настоящему варианту осуществления может объявить это голосом.
[0053] На этапе S220 устройство 10 управления изменяет направление формирования изображения камеры 20 на основе положения, полученного на этапе S160, области изображения сигнала регулирования движения из захваченного изображения. Это потому, что, когда изображение сигнала регулирования движения сдвигается из центра захваченного изображения, может быть необходима коррекция направления формирования изображения камеры 20, так что может быть получено все изображение сигнала регулирования движения.
[0054] В настоящем варианте осуществления область изображения сигнала регулирования движения, выделенную на этапе S160, используется на этапе S210 для предсказания области изображения сигнала регулирования движения во время процесса, выполняемого в последующий промежуток времени. И направление формирования изображения камеры 20 изменяется на этапе S220 на основе положения предсказанной области изображения сигнала регулирования движения. Так как транспортное средство движется, предполагается, что являются разными положение области изображения сигнала регулирования движения в настоящем промежутке времени обработки и положение области изображения сигнала регулирования движения в последующем промежутке времени обработки (следующем промежутке времени). В настоящем варианте осуществления информация о следовании собственного транспортного средства, такая как скорость транспортного средства и степень отклонения от направления следования собственного транспортного средства, и оцененное время, требуемое для процесса вычисления области изображения сигнала регулирования движения, учитываются при вычислении области изображения сигнала регулирования движения, подлежащего заданию в последующем промежутке времени.
[0055] Устройство 100 распознавания сигнала регулирования движения согласно настоящему варианту осуществления имеет следующие полезные эффекты.
[0056] (1) Устройство 100 распознавания сигнала регулирования движения настоящего варианта осуществления ссылается на картографическую информацию 41 для задания намечаемого целевым сигнала регулирования движения посредством использования пути следования, к которому принадлежит текущее положение собственного транспортного средства. Картографическая информация 41 включает в себя данные 411 пути следования и данные 412 сигнала регулирования движения. Данные 411 пути следования представляют собой данные, определяемые направленным путем и связанные с информацией о подсоединяемом пути и направлением следования. Данные 412 сигнала регулирования движения представляют собой данные, связанные с данными пути следования. Поэтому даже в сложной дорожной ситуации, в которой присутствует несколько сигналов регулирования движения, корректно предполагается путь следования для собственного транспортного средства, так что может корректно задаваться один сигнал регулирования движения, намечаемый целевым водителем.
В настоящем варианте осуществления путь следования определяется направленным путем, включающим в себя начальную точку и конечную точку. Этот путь следования устанавливается для каждой полосы движения на дороге. На перекрестке этот путь следования устанавливается для каждого элемента информации о направлении следования, такого как прямо вперед, правый поворот или левый поворот. Поэтому даже в ситуации на сложном перекрестке, например, как показано на фиг.3, может задаваться сигнал регулирования движения, намечаемый целевым собственным транспортным средством.
В настоящем варианте осуществления путь следования связан с информацией о подсоединяемом пути, который впоследствии подсоединяется к нему. Поэтому даже когда множество путей следования присутствует на одной и той же дороге, путь следования, к которому принадлежит собственное транспортное средство, может предполагаться соответствующим образом. Например, когда транспортное средство поворачивает налево на перекрестке, на котором располагается сигнал SG2 регулирования движения, как показано на фиг.3, путь LKU2C следования с левым поворотом и путь LKU2A следования с движением прямо вперед присутствуют на одной и той же полосе движения. Однако путь LKU2C следования с левым поворотом связан с подсоединяемым путем LKU3-TL в виде проезда, тогда как путь LKU2A следования прямо вперед связан с подсоединяемым путем LKU3-ST в виде проезда, и поэтому могут корректно идентифицироваться путь LKU2C следования и путь LKU2A следования.
[0057] (2) Согласно устройству 100 распознавания сигнала регулирования движения настоящего варианта осуществления процесс задания пути следования выполняется в момент времени, когда собственное транспортное средство приблизилось на заданное расстояние до узла конечной точки, и, таким образом, может корректно задаваться путь следования для последующего следования. Например, когда точность обнаружения текущего положения собственного транспортного средства становится низкой, является возможным исключение выбора некорректного подсоединяемого пути в настоящем варианте осуществления.
[0058] (3) Согласно устройству 100 распознавания сигнала регулирования движения настоящего варианта осуществления получается пространственное расположение собственного транспортного средства, и область изображения сигнала регулирования движения выделяется в пространственном расположении транспортного средства. Следовательно, положение области изображения, в которой может быть точно получено изображение сигнала регулирования движения.
[0059] (4) Устройство 100 распознавания сигнала регулирования движения настоящего варианта осуществления применяет форму информации, в которой один элемент данных сигнала регулирования движения относительно связан с одним элементом данных пути следования. Поэтому один намечаемый целевым сигнал регулирования движения может задаваться посредством использования информации пути следования, которая была очень точно предположена с использованием информации о полосе, направленном пути, подсоединяемом пути и направлении следования.
[0060] (5) В устройстве 100 распознавания сигнала регулирования движения настоящего варианта осуществления может приводиться в действие перемещение камеры 20. Поэтому камера 20 может захватывать изображение сигнала регулирования движения независимо от ее расположения. Например, в ситуации обстановки на перекрестке, как показано на фиг.3, в которой транспортное средство ожидает правого поворота в точке TRP пути LKU3-TR следования, камера 20 может захватывать изображение сигнала SG3 регулирования движения, который был бы вне поля обзора при использовании обычной камеры для захвата изображения с просмотром вперед. Может предпочтительно использоваться камера управляемого типа, имеющая узкий угол обзора, так как в данном случае может быть уменьшена возможность захвата сигнала регулирования движения, не намечаемого целевым, таким образом исключая некорректное распознавание по сравнению с использованием камеры, имеющей широкий угол обзора.
[0061] (6) В устройстве 100 распознавания сигнала регулирования движения настоящего варианта осуществления камера 20 имеет функцию изменения масштаба изображения и выполняет управление увеличением и уменьшением кратности увеличения захвата изображения в соответствии с размером области изображения сигнала регулирования движения. Поэтому размер области изображения сигнала регулирования движения в захваченном изображении может поддерживаться соответствующим образом независимо от зависимости от расстояния до сигнала регулирования движения. Это позволяет дополнительно уменьшить опасность захвата другого сигнала регулирования движения. Кроме того, может быть повышена точность процесса распознавания сигнала регулирования движения, так как приблизительно сохраняется постоянным размер области изображения сигнала регулирования движения в качестве объекта распознавания.
[0062] Варианты осуществления, объясненные выше, описаны для того, чтобы облегчить понимание настоящего изобретения и не описаны для того, чтобы ограничить настоящее изобретение. Поэтому предполагается, что элементы, описанные в вышеупомянутых вариантах осуществления, включают в себя все изменения конструкции и эквиваленты, подпадающие под технический объем настоящего изобретения.
[0063] Т.е. в настоящем описании система 1 поддержки вождения описана как пример, который содержит устройство 100 распознавания сигнала регулирования движения согласно настоящему изобретению, навигационное устройство 50, контроллер 60 транспортного средства и систему 70 привода, но настоящее изобретение не ограничивается ими.
[0064] В настоящем описании устройство 100 распознавания сигнала регулирования движения, содержащее устройство 10 управления, камеру 20 в качестве блока захвата изображения, устройство 30 обнаружения положения и базу 40 данных, описано как пример варианта осуществления устройства распознавания сигнала регулирования движения согласно настоящему изобретению, но настоящее изобретение не ограничивается им.
[0065] В настоящем описании устройство 100 распознавания сигнала регулирования движения, имеющее устройство 10 управления, которое исполняет функцию получения захваченного изображения, функцию получения положения собственного транспортного средства, функцию задания целевого сигнала регулирования движения, функцию выделения области изображения сигнала регулирования движения и функцию распознавания содержимого сигнала регулирования движения, описано в качестве примера устройства распознавания содержимого сигнала регулирования движения согласно настоящему изобретению, которое содержит блок получения захваченного изображения, блок получения положения собственного транспортного средства, блок задания целевого сигнала регулирования движения, блок выделения области изображения сигнала регулирования движения и блок распознавания содержимого сигнала регулирования движения, но настоящее изобретение не ограничивается им.
Описание ссылочных позиций
[0066] 1 – система поддержки вождения
100 – устройство распознавания сигнала регулирования движения
10 – устройство управления
11 – CPU
12 – ROM
13 – RAM
20 – камера
30 – устройство обнаружения положения
40 – база данных
41 – картографическая информация
411 – данные пути следования
412 – данные сигнала регулирования движения
50 – навигационное устройство
60 – контроллер транспортного средства
70 – система привода




Изобретение относится к устройству распознавания сигнала регулирования движения. Устройство работает следующим образом. Получают захваченное изображение вокруг транспортного средства от камеры; получают положение транспортного средства; задают целевой сигнал регулирования на пути следования, который ссылается на картографическую информацию. Картографическая информация включает в себя данные пути следования и данные сигнала регулирования движения. Данные пути следования включают в себя информацию о подсоединяемом пути и о направлении следования, которые связаны друг с другом. Выделяют область изображения сигнала регулирования движения на основе информации о положении сигнала регулирования движения и информации о свойствах захвата изображения камеры. Распознают содержимое сигнала регулирования движения сигнала для регулирования движения на основе изображения сигнала регулирования движения в области изображения. Обеспечивается точность распознавания сигнала регулирования движения. 2 н. и 5 з.п. ф-лы, 6 ил.
1. Устройство распознавания сигнала регулирования движения, содержащее:
блок получения захваченного изображения, выполненный с возможностью получения захваченного изображения вокруг собственного транспортного средства от блока захвата изображения на транспортном средстве;
блок получения положения собственного транспортного средства, выполненный с возможностью получения текущего положения собственного транспортного средства;
блок задания целевого сигнала регулирования движения, выполненный с возможностью:
ссылки на картографическую информацию;
вычисления следующего пути следования посредством использования пути следования, причем путь следования является путем, к которому принадлежит текущее положение собственного транспортного средства, причем следующий путь следования является путем, по которому затем следует собственное транспортное средство после пути следования; и
задания намечаемого целевым сигнала регулирования движения при следовании по следующему пути следования;
блок выделения области изображения сигнала регулирования движения, выполненный с возможностью выделения области изображения сигнала регулирования движения из захваченного изображения посредством использования информации о положении заданного сигнала регулирования движения и информации о свойствах захвата изображения блока захвата изображения; и
блок распознавания содержимого сигнала регулирования движения, выполненный с возможностью распознавания содержимого сигнала регулирования движения для сигнала регулирования движения посредством использования изображения сигнала регулирования движения, включенного в выделенную область изображения, причем
картографическая информация включает в себя данные пути следования и данные сигнала регулирования движения,
данные пути следования включают в себя:
путь следования, который определяется для каждой полосы движения направленным путем, включающим в себя начальную точку, конечную точку и направление вперед или обратное направление;
подсоединяемый путь, который подсоединяется к каждой из начальной точки и конечной точки направленного пути; и
информацию о направлении следования, которая задает направление следования, включающее в себя прямо вперед, или правый поворот, или левый поворот,
причем путь следования, подсоединяемый путь и информация о направлении следования связаны друг с другом,
данные сигнала регулирования движения связаны с путем следования, и
данные сигнала регулирования движения включают в себя информацию о положении намечаемого целевым сигнала регулирования движения при следовании по пути следования.
2. Устройство распознавания сигнала регулирования движения по п. 1, в котором
блок задания целевого сигнала регулирования движения выполнен с возможностью
ссылки на данные пути следования для следования собственного транспортного средства,
вычисления следующего пути следования, когда расстояние между собственным транспортным средством и конечной точкой направленного пути, связанного с путем следования, меньше заданного значения, и
задания намечаемого целевым сигнала регулирования движения при следовании по следующему пути следования.
3. Устройство распознавания сигнала регулирования движения по п. 1, в котором
блок получения положения собственного транспортного средства выполнен с возможностью получения пространственного расположения собственного транспортного средства в текущем положении и
блок выделения области изображения сигнала регулирования движения выполнен с возможностью выделения области изображения сигнала регулирования движения из захваченного изображения в соответствии с полученным пространственным расположением собственного транспортного средства.
4. Устройство распознавания сигнала регулирования движения по п. 1, в котором
один элемент данных пути следования связан соответственно с одним элементом данных сигнала регулирования движения.
5. Устройство распознавания сигнала регулирования движения по п. 1, в котором
блок захвата изображения содержит механизм перемещения, который выполнен с возможностью изменения направления формирования изображения блока захвата изображения, и
механизм перемещения выполнен с возможностью изменения направления формирования изображения блока захвата изображения в соответствии с положением области изображения сигнала регулирования движения на захваченном изображении.
6. Устройство распознавания сигнала регулирования движения по п. 1, в котором
блок захвата изображения имеет функцию изменения масштаба изображения, и
функция изменения масштаба изображения блока захвата изображения включает в себя функцию управления кратностью увеличения захвата изображения, которая управляется на основе отношения поверхности области изображения сигнала регулирования движения относительно области изображения захваченного изображения.
7. Устройство распознавания сигнала регулирования движения, содержащее:
камеру, которая установлена на собственном транспортном средстве;
устройство обнаружения положения; и
устройство управления, в котором
камера выполнена с возможностью захвата изображения вокруг собственного транспортного средства,
устройство обнаружения положения выполнено с возможностью обнаружения текущего положения собственного транспортного средства,
устройство управления выполнено с возможностью:
ссылки на картографическую информацию, хранимую в базе данных;
вычисления следующего пути следования посредством использования пути следования, причем путь следования является путем, к которому принадлежит обнаруженное текущее положение собственного транспортного средства, следующий путь следования является путем, по которому затем следует собственное транспортное средство после пути следования;
задания намечаемого целевым сигнала регулирования движения при следовании по следующему пути следования;
выделения области изображения сигнала регулирования движения из захваченного изображения посредством использования информации о положении заданного сигнала регулирования движения и информации о свойствах захвата изображения камеры; и
распознавания содержимого сигнала регулирования движения для сигнала регулирования движения посредством использования изображения сигнала регулирования движения, включенного в выделенную область изображения,
картографическая информация включает в себя данные пути следования и данные сигнала регулирования движения,
данные пути следования включают в себя:
путь следования, который определяется для каждой полосы движения посредством направленного пути, включающего в себя начальную точку, конечную точку и направление вперед или обратное направление;
подсоединяемый путь, который подсоединяется к каждой из начальной точки и конечной точки направленного пути; и
информацию о направлении следования, которая задает направление следования, включающее в себя прямо вперед, или правый поворот, или левый поворот,
причем путь следования, подсоединяемый путь и информация о направлении следования связаны друг с другом,
данные сигнала регулирования движения связаны с путем следования, и
данные сигнала регулирования движения включают в себя информацию о положении намечаемого целевым сигнала регулирования движения при следовании по пути следования.
| WO 2007102065 A1, 13.09.2007 | |||
| Конденсационное устройство для паровых машин | 1926 |
|
SU8402A1 |

