ОБЛАСТЬ ТЕХНИКИ
[0001]
Настоящее изобретение относится к способу управления устройством и устройству управления транспортным средством.
УРОВЕНЬ ТЕХНИКИ
[0002]
В приведенном ниже PTL 1 описана технология идентификации светофора и одновременного определения цвета свечения светофора посредством анализа изображения, сформированного перед собственным транспортным средством, и на основе результата определения управления автономным вождением собственного транспортного средства.
СПИСОК ЦИТИРУЕМЫХ ДОКУМЕНТОВ
ПАТЕНТНЫЙ ДОКУМЕНТ
[0003]
[PTL 1] JP 2019-79126 A
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
[0004]
Однако, когда существует находящееся впереди транспортное средство, движущееся перед собственным транспортным средством, диапазон угла обзора (диапазон формирования изображения) средства захвата изображения заслоняется находящимся впереди транспортным средством, что иногда приводит к тому, что светофор не может быть распознан из захваченного изображения.
С другой стороны, когда собственным транспортным средством управляют таким образом, чтобы постоянно поддерживать достаточное расстояние между транспортными средствами между собственным транспортным средством и находящимся впереди транспортным средством, чтобы не допустить заслонение светофора в диапазоне угла обзора средств захвата изображения, существует вероятность того, что расстояние между транспортными средствами станет излишне большим, что создаст ощущение дискомфорта у пассажира собственного транспортного средства.
Цель настоящего изобретения состоит в том, чтобы при автономном вождении на основе результата распознавания светофора по захваченному изображению предотвратить ненужное выполнение управления для предотвращения заслонения светофора в диапазоне угла обзора камеры находящимся впереди транспортным средством.
РЕШЕНИЕ ЗАДАЧИ
[0005]
В соответствии с аспектом изобретения предложен способ управления транспортным средством, в котором камера, выполненная с возможностью захвата изображения с заданным диапазоном угла обзора перед собственным транспортным средством, установлена на собственном транспортном средстве и светофор распознается на основе изображения, захваченного камерой, при этом способ включает в себя: на основе картографической информации, включающей в себя информацию о местоположении установки светофора и информацию о полосе движения, регулируемой светофором, и диапазоне угла обзора светофора камеры, установленной на собственном транспортном средстве, вычисление обеспечивающей возможность формирования изображения области, в которой изображение светофора может быть захвачено в полосе движения камерой; определение, находится ли собственное транспортное средство в обеспечивающей возможность формирования изображения области; и когда собственное транспортное средство находится в обеспечивающей возможность формирования изображения области, управление собственным транспортным средством таким образом, чтобы светофор не заслонялся в диапазоне угла обзора камеры находящимся впереди транспортным средством относительно собственного транспортного средства.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
[0006]
В соответствии с аспектом настоящего изобретения при автономном вождении на основе результата распознавания светофора по захваченному изображению возможно предотвратить ненужное выполнение управления для предотвращения заслонения светофора в диапазоне угла обзора камеры находящимся впереди транспортным средством.
Цель и преимущества изобретения будут реализованы и достигнуты с помощью элементов и комбинаций, в частности указанных в формуле изобретения. Следует понимать, что как предшествующее общее описание, так и последующее подробное описание являются иллюстративными и пояснительными и не ограничивают изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007]
Фиг. 1 является схематичным представлением конфигурации устройства управления транспортным средством согласно варианту осуществления;
Фиг. 2 является пояснительной схемой примера способа управления транспортным средством согласно варианту осуществления;
Фиг. 3 является блок-схемой, иллюстрирующей пример функциональной конфигурации устройства управления транспортным средством согласно варианту осуществления;
Фиг. 4 является пояснительной схемой примера обеспечивающих возможность формирования изображения областей;
Фиг. 5А является пояснительной схемой примера способа вычисления обеспечивающих возможность формирования изображения областей;
Фиг. 5B является еще одной пояснительной схемой примера способа вычисления обеспечивающих возможность формирования изображения областей;
Фиг. 6 является пояснительной схемой примера обеспечивающих возможность формирования изображения областей на множестве полос движения;
Фиг. 7 является пояснительной схемой примера управления транспортным средством, когда собственное транспортное средство находится в обеспечивающей возможность формирования изображения области;
Фиг. 8 является примером способа вычисления расстояния между транспортными средствами;
Фиг. 9 является пояснительной схемой еще одного примера управления транспортным средством, когда собственное транспортное средство находится в обеспечивающей возможность формирования изображения области;
Фиг. 10 является пояснительной схемой примера управления транспортным средством, когда нет находящегося впереди транспортного средства и светофор не может быть распознан;
Фиг. 11 является схемой, иллюстрирующей ситуацию, в которой собственное транспортное средство находится за пределами обеспечивающих возможность формирования изображения областей; и
Фиг. 12 является блок-схемой последовательности операций примера способа управления транспортным средством согласно варианту осуществления.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0008]
Теперь со ссылкой на чертежи будет описан вариант осуществления настоящего изобретения.
Конфигурация
Собственное транспортное средство 1 включает в себя устройство 10 управления транспортным средством, выполненное с возможностью автоматического управления движением собственного транспортного средства 1. Устройство 10 управления транспортным средством определяет собственное местоположение собственного транспортного средства 1, которое является текущим местоположением собственного транспортного средства 1, и помогает вождению собственного транспортного средства 1 посредством управления движением собственного транспортного средства 1 на основе обнаруженного собственного местоположения.
Например, на основе обнаруженного собственного местоположения и окружающей среды движения вокруг собственного транспортного средства 1 устройство 10 управления транспортным средством помогает вождению посредством выполнения автономного управления движением, заставляя собственное транспортное средство 1 двигаться самостоятельно без участия водителя.
[0009]
Устройство 10 управления транспортным средством может помогать вождению посредством управления только ускорением и замедлением на основе оцененного собственного местоположения и окружающей среды движения вокруг собственного транспортного средства 1. Например, устройство 10 управления транспортным средством может выполнять управление движением с постоянной скоростью, которое заставляет собственное транспортное средство 1, когда нет находящегося впереди транспортного средства, двигаться, поддерживая установленную скорость, и, когда существует находящееся впереди транспортное средство, движущееся со скоростью меньше установленной скорости, двигаться таким образом, чтобы следовать за находящимся впереди транспортным средством. Устройство 10 управления транспортным средством может управлять расстоянием между транспортными средствами до находящегося впереди транспортного средства в соответствии со скоростью собственного транспортного средства 1.
Устройство 10 управления транспортным средством включает в себя датчики 11 объектов, датчики 12 транспортного средства, устройство 13 определения местоположения, картографическую базу 14 данных, устройство 15 связи, навигационную систему 17, контроллер 18 и исполнительные механизмы 19. Картографическая база данных упоминается на чертежах как «картографическая БД».
[0010]
Датчики 11 объектов включают в себя множество датчиков различных типов, которые выполнены с возможностью обнаружения объектов вокруг собственного транспортного средства 1.
Например, датчики 11 объектов включают в себя камеру 20, установленную на собственном транспортном средстве 1. Камера 20 захватывает изображение в пределах заданного диапазона угла обзора (диапазона формирования изображения) перед собственным транспортным средством 1 и выводит захваченное изображение в контроллер 18. Следует отметить, что в последующем описании «формирование изображения» также описывается как «захват изображения», и термины используются, предполагая, что термины имеют одно и то же значение в данном документе.
Датчики 11 объектов могут включать в себя датчик расстояния, такой как лазерный радар, радар миллиметрового диапазона и устройство обнаружения и измерения расстояния с помощью света или устройство обнаружения и измерения расстояния с помощью лазерного формирования изображения (ЛИДАР).
[0011]
Датчики 12 транспортного средства установлены на собственном транспортном средстве 1 и обнаруживают различную информацию (сигналы транспортного средства), которая получена от собственного транспортного средства 1. Датчики 12 транспортного средства включают в себя, например, датчик скорости транспортного средства, выполненный с возможностью определения скорости движения (скорости транспортного средства) собственного транспортного средства 1, датчики скорости вращения колес, выполненные с возможностью определения скорости вращения соответствующих шин собственного транспортного средства 1, трехосный датчик ускорения (G-датчик), выполненный с возможностью обнаружения ускорения (включая замедление) в трех осевых направлениях собственного транспортного средства 1, датчик угла поворота рулевого колеса, выполненный с возможностью определения угла поворота рулевого колеса (включая угол поворота), гироскопический датчик, выполненный с возможностью определения угловой скорости, создаваемой в собственном транспортном средстве 1, датчик скорости рыскания, выполненный с возможностью определения скорости рыскания, датчик акселератора, выполненный с возможностью обнаружения открытия акселератора собственного транспортного средства, и датчик тормоза, выполненный с возможностью определения величины операции торможения водителем.
[0012]
Устройство 13 определения местоположения включает в себя приемник глобальной навигационной спутниковой системы (GNSS) и принимает радиоволны от множества навигационных спутников и, таким образом, измеряет текущее местоположение собственного транспортного средства 1. Приемник GNSS может быть, например, приемником глобальной системы определения местоположения (GPS). Устройство 13 определения местоположения может быть, например, инерциальным навигационным устройством.
Картографическая база 14 данных может хранить высокоточные картографические данные (далее называемые просто «высокоточные карты»), которые подходят в качестве картографической информации для автоматического вождения. Высокоточная карта представляет собой картографические данные более высокой точности, чем картографические данные для навигации (в дальнейшем именуемые просто «навигационная карта»), и включают в себя информацию о каждой полосе движения, которая является более подробной, чем информация о каждой дороге. В дальнейшем информация о каждой полосе движения, включенная в высокоточные картографические данные, упоминается как «информация о полосе движения».
[0013]
Например, высокоточная карта включает в себя в качестве информации о полосе движения информацию об узлах полосы движения, которая указывает опорные точки на опорной линии полосы движения (например, центральной линии в полосе движения), и информацию о звеньях полосы движения, которые указывают формы участков полосы движения между узлами полосы движения.
Информация о каждом узле полосы движения включает идентификационный номер и координаты местоположения узла полосы движения, количество соединенных звеньев полосы движения и идентификационные номера соединенных звеньев полосы движения. Информация о каждом звене полосы движения включает в себя идентификационный номер звена полосы движения, тип полосы движения, ширину полосы движения, типы граничных линий полосы движения, форму полосы движения, уклон полосы движения, форму разметки полосы движения, и форму опорной линии полосы движения.
Высокоточная карта дополнительно включает в себя типы и координаты местоположения наземных объектов, таких как стоп-линия, дорожный знак, здание, опора, бордюр и пешеходный переход, которые существуют на полосе движения или поблизости от полосы движения, и информацию о наземных объектах, такую как идентификационные номера узлов полосы движения и идентификационные номера звеньев полосы движения, которые соответствуют координатам местоположения наземных объектов.
[0014]
Карта высокой точности дополнительно включает в себя информацию о светофоре, который существует на полосе движения или поблизости от полосы движения. Информация о светофоре, включенная в высокоточные картографические данные, иногда называется «информацией светофора».
Информация светофора включает в себя информацию о местоположении установки каждого светофора и идентификационную информацию стоп-линии, соответствующей каждому светофору. Информация светофора указывает полосу движения, на которой дорожное движение регулируется светофором, посредством идентификационной информации стоп-линии, соответствующей светофору.
Когда не существует стоп-линии, соответствующей светофору, информация светофора может включать в себя, например, информацию об узле полосы движения перекрестка, на котором установлен светофор, или информацию о пешеходном переходе, на котором установлен светофор. Информация светофора указывает полосу движения, на которой дорожное движение регулируется светофором, посредством такой информации.
[0015]
Используемый здесь термин «полоса движения, на которой дорожное движение регулируется светофором» является полосой движения, на которой проезд за стоп-линию, установленную в соответствии со светофором, разрешен или запрещен в зависимости от указания светофора, или полосой движения, по которой въезжают на перекресток или пешеходный переход, на которой установлен светофор, разрешен или запрещен в зависимости от указания светофора.
Информация о местоположении установки светофора включает в себя по меньшей мере двумерные координаты в системе координат карты (или глобальной системе координат) местоположения, в котором установлен светофор. Информация о местоположении установки светофора может включать в себя, в дополнение к двухмерным координатам местоположения, в котором установлен светофор, информацию о высоте светофора. Однако, поскольку высота установки светофоров предписывается законом в пределах заданного диапазона, высота светофора не обязательно должна быть включена в высокоточные картографические данные.
[0016]
Устройство 15 связи осуществляет беспроводную связь с устройством связи, внешним по отношению к собственному транспортному средству 1. Способ связи, используемый устройством 15 связи, может быть, например, беспроводной связью через мобильную телефонную сеть общего пользования, связью транспортное средство-транспортное средство, связью дорога-транспортное средство или спутниковой связью.
[0017]
Навигационная система 17 распознает текущее местоположение собственного транспортного средства 1, используя устройство 13 определения местоположения, и получает картографическую информацию о текущем местоположении из картографической базы 14 данных. Навигационная система 17 устанавливает маршрут движения к пункту назначения, который вводит пассажир, и выполняет руководство по маршруту для пассажира в соответствии с маршрутом движения.
Навигационная система 17 также выводит информацию об установленном маршруте движения в контроллер 18. При выполнении автономного управления движением контроллер 18 заставляет собственное транспортное средство 1 двигаться самостоятельно таким образом, что собственное транспортное средство 1 движется по маршруту движения, установленному навигационной системой 17.
[0018]
Контроллер 18 представляет собой электронный блок управления (ЭБУ), который осуществляет управление собственным транспортным средством 1. Контроллер 18 включает в себя процессор 21 и периферийные компоненты, такие как запоминающее устройство 22. Процессор 21 может быть, например, центральным процессором (CPU) или микропроцессором (MPU).
Запоминающее устройство 22 может включать в себя полупроводниковое запоминающее устройство, магнитное запоминающее устройство, оптическое запоминающее устройство и т.п. Запоминающее устройство 22 может включать в себя регистры, кэш-память, память, такую как постоянное запоминающее устройство (ПЗУ) или оперативное запоминающее устройство (ОЗУ), которое используется в качестве основного запоминающего устройства и т.п.
Функции контроллера 18, которые будут описаны ниже, могут быть реализованы, например, процессором 21, выполняющим компьютерные программы, хранящиеся в запоминающем устройстве 22.
[0019]
Следует отметить, что контроллер 18 может быть сформирован с использованием специального аппаратного обеспечения для выполнения обработки информации, которая будет описана ниже.
Например, контроллер 18 может включать в себя функциональную логическую схему, реализованную в полупроводниковой интегральной схеме общего назначения. Например, контроллер 18 может включать в себя программируемое логическое устройство (PLD), такое как программируемая пользователем вентильная матрица (FPGA) и т.п.
[0020]
Исполнительные механизмы 19 управляют рулевым колесом, открытием акселератора и тормозным устройством собственного транспортного средства 1 в соответствии с управляющим сигналом от контроллера 18 и, таким образом, формируют режим работы собственного транспортного средства 1. Исполнительные механизмы 19 включают в себя исполнительный механизм рулевого управления, исполнительный механизм открывания акселератора и исполнительный механизм управления тормозом. Исполнительный механизм рулевого управления управляет направлением рулевого управления и величиной рулевого управления при рулевом управлении собственного транспортного средства 1. Исполнительный механизм открытия акселератора управляет открытием акселератора собственного транспортного средства 1. Исполнительный механизм управления тормозом управляет тормозным действием тормозного устройства собственного транспортного средства 1.
[0021]
Далее будет описан пример управления движением собственного транспортного средства 1, выполняемого контроллером 18. Контроллер 18 распознает светофор, регулирующий движение в полосе движения, по которой движется собственное транспортное средство 1, по захваченному изображению, захваченному камерой 20. Контроллер 18 заставляет собственное транспортное средство 1 двигаться или останавливаться в соответствии с указанием распознанного светофора.
Как описано выше, когда диапазон угла обзора камеры 20 заслонен находящимся впереди транспортным средством, движущимся перед собственным транспортным средством 1, иногда становится невозможно распознать светофор на захваченном изображении.
[0022]
С другой стороны, когда собственным транспортным средством управляют таким образом, чтобы постоянно поддерживать достаточное расстояние между транспортными средствами между собственным транспортным средством 1 и находящимся впереди транспортным средством, чтобы не допустить заслонение светофора в диапазоне угла обзора, существует вероятность того, что расстояние между транспортными средствами станет излишне большим, что создаст ощущение дискомфорта у пассажира собственного транспортного средства 1.
Таким образом, контроллер 18 вычисляет диапазон угла обзора (диапазон захвата изображения) камеры 20 на основе оптической информации камеры 20 (такой как информация об угле обзора камеры 20) и информации установки камеры 20 (такой как местоположение установки камеры на собственном транспортном средстве 1 и ориентация оптической системы камеры). Оптическая информация и информация установки камеры 20 устанавливаются и сохраняются в запоминающем устройстве 22 заранее. Следует отметить, что когда информация установки камеры 20 (местоположение установки камеры и ориентация оптической системы по отношению к собственному транспортному средству 1) не изменяется, то есть когда состояние установки камеры относительно собственного транспортного средства 1 зафиксировано, информация установки камеры 20 не обязательно требуется, поскольку диапазон угла обзора камеры 20 по отношению к собственному транспортному средству является фиксированным.
Контроллер 18 вычисляет обеспечивающую возможность формирования изображения область, в которой изображение светофора может быть захвачено на полосе движения камерой 20, в случае отсутствия находящегося впереди транспортного средства на основе диапазона угла обзора камеры 20 и картографической информации.
[0023]
Теперь ссылка делается на фиг. 2. Теперь предполагается случай, когда перед собственным транспортным средством 1 имеется светофор 30. Светофор 30 представляет собой светофор, который регулирует дорожное движение на множестве полос 31 и 32 движения. Направления движения полос 31 и 32 движения одинаковы, и полоса 31 движения является полосой движения собственного транспортного средства 1, а полоса 32 движения является полосой движения, смежной с полосой 31 движения.
Контроллер 18 вычисляет обеспечивающую возможность формирования изображения область 33, в которой изображение светофора 30 может быть захвачено на полосе 31 движения камерой 20 в случае, когда на дороге нет другого транспортного средства, на основе информации светофора для светофора 30, информации о полосе движения для полосы 31 движения и диапазона угла обзора камеры 20.
[0024]
Обеспечивающая возможность формирования изображения область 33 представляет собой область, в которой можно ожидать, что изображение светофора 30 будет захвачено на полосе 31 движения камерой 20, если диапазон угла обзора камеры 20 не заслонен находящимся впереди транспортным средством 2. И наоборот, область на полосе 31 движения за пределами обеспечивающей возможность формирования изображения области 33 представляет собой область, в которой изображение светофора 30 не может быть захвачено, даже если диапазон угла обзора камеры 20 не заслонен.
Таким же образом, контроллер 18 также вычисляет обеспечивающую возможность формирования изображения область 34 по отношению к полосе 32 движения. То есть, контроллер 18 вычисляет обеспечивающую возможность формирования изображения область 34, в которой изображение светофора 30 может быть захвачено на полосе 32 движения камерой 20 в случае, когда на дороге нет другого транспортного средства, на основе информации светофора для светофора 30, информации о полосе движения для полосы 32 движения и диапазона угла обзора камеры 20.
[0025]
Контроллер 18 определяет, расположено ли собственное транспортное средство 1 в обеспечивающей возможность формирования изображения области 33 или 34.
Когда собственное транспортное средство 1 расположено в обеспечивающей возможность формирования изображения области 33 или 34, можно ожидать, что изображение светофора 30 будет захвачено, если диапазон угла обзора камеры 20 не заслонен находящимся впереди транспортным средством. Следовательно, в данном случае контроллер 18 управляет собственным транспортным средством 1 таким образом, что светофор 30 не заслоняется в диапазоне угла обзора камеры 20 находящимся впереди транспортным средством 2.
[0026]
Например, когда светофор 30 не распознается по захваченному изображению, захваченному камерой 20, контроллер 18 вычисляет расстояние между транспортными средствами, при котором светофор 30 не заслоняется находящимся впереди транспортным средством 2, и посредством замедления собственного транспортного средства 1 в соответствии с расстоянием между транспортными средствами, увеличивает расстояние между транспортными средствами между находящимся впереди транспортным средством 2 и собственным транспортным средством 1.
В дополнение к вышеизложенному или вместо него контроллер 18 может управлять собственным транспортным средством таким образом, чтобы увеличить отклонение поперечного положения между собственным транспортным средством 1 и находящимся впереди транспортным средством 2 в направлении, в котором светофор 30 отклоняется от центра полосы 31 движения.
[0027]
С другой стороны, когда светофор 30 распознается по захваченному изображению, захваченному камерой 20, контроллер 18 управляет скоростью собственного транспортного средства 1 таким образом, чтобы поддерживать расстояние между транспортными средствами между находящимся впереди транспортным средством 2 и собственным транспортным средством 1 на расстоянии между транспортными средствами, при котором светофор 30 не заслоняется находящимся впереди транспортным средством 2.
Управление движением собственного транспортного средства 1 для предотвращения заслонения светофора 30 в диапазоне угла обзора камеры 20 находящимся впереди транспортным средством 2, как описано выше, далее именуется «управление для предотвращения заслонения».
[0028]
Наоборот, когда собственное транспортное средство 1 не расположено ни в обеспечивающей возможность формирования изображения области 33, ни в обеспечивающей возможность формирования изображения области 34, изображение светофора 30 не может быть первоначально захвачено, даже если диапазон угла обзора камеры 20 не заслонен. Следовательно, в этом случае вышеописанное управление для предотвращения заслонения запрещается.
Эта конфигурация позволяет предотвратить ненужное выполнение управления для предотвращения заслонения в области, в которой изображение светофора 30 не может быть первоначально захвачено. В результате возможно устранить чувство дискомфорта, которое возникает у пассажира собственного транспортного средства 1, посредством ненужного выполнения управления для предотвращения заслонения.
[0029]
Например, при автономном управлении движением и управлении движением с постоянной скоростью, описанным выше, контроллер 18 управляет расстоянием между транспортными средствами между находящимся впереди транспортным средством 2 и собственным транспортным средством 1 таким образом, что расстояние между транспортными средствами совпадает с определенным целевым значением независимо от того, заслонен ли светофор 30 в диапазоне угла обзора камеры 20 находящимся впереди транспортным средством 2. Например, контроллер 18 может определить целевое значение расстояния между транспортными средствами до находящегося впереди транспортного средства в соответствии со скоростью собственного транспортного средства 1.
Кроме того, контроллер 18 может управлять поперечным положением собственного транспортного средства 1 таким образом, чтобы поперечное положение собственного транспортного средства 1 в полосе 31 движения, которая является полосой движения собственного транспортного средства 1, совпадало с заданным начальным значением (например, центром полосы движения).
[0030]
Функции контроллера 18 будут подробно описаны ниже. Теперь ссылка делается на фиг. 3. Контроллер 18 включает в себя блок 40 обнаружения объекта, блок 41 оценки местоположения собственного транспортного средства, блок 42 получения карты, блок 43 объединения обнаружений, блок 44 отслеживания объекта, блок 45 обнаружения находящегося впереди транспортного средства, блок 46 вычисления местоположения на карте, блок 47 распознавания светофора, блок 48 управления для предотвращения заслонения, блок 49 формирования маршрута собственного транспортного средства и блок 50 управления транспортным средством.
[0031]
Блок 40 обнаружения объекта определяет местоположение, угловое пространственное положение, размер, скорость и т.п. объекта, такого как транспортное средство, мотоцикл, пешеход и препятствие, около собственного транспортного средства 1 на основе сигналов обнаружения от датчиков 11 объектов. Блок 40 обнаружения объекта выводит результат обнаружения, представляющий двухмерное местоположение, угловое пространственное положение, размер, скорость и т.п. объекта, например, в виде в зените (также называемом видом сверху), который представляет собой вид собственного транспортного средства 1 с воздуха.
Блок 41 оценки местоположения собственного транспортного средства измеряет абсолютное положение, то есть местоположение собственного транспортного средства 1 относительно заданной опорной точки, угловое пространственное положение и скорость собственного транспортного средства 1, на основе результата измерения устройством 13 определения местоположения и одометрии, используя результаты обнаружения от датчиков 12 транспортного средства.
[0032]
Блок 42 получения карты получает картографическую информацию о дороге, по которой движется собственное транспортное средство 1, из картографической базы 14 данных. Блок 42 получения карты может получать картографическую информацию с внешнего сервера картографических данных через устройство 15 связи.
Картографическая информация, полученная блоком 42 получения карты, включает в себя информацию светофора для светофора, существующего перед собственным транспортным средством 1 на пути собственного транспортного средства 1, информацию о полосе движения, движение по которой регулируется светофором, и информацию о наземных объектах, существующих на полосе движения или вблизи нее.
[0033]
Блок 43 объединения обнаружений объединяет множество результатов обнаружения, которые блок 40 обнаружения объекта соответственно получил от множества датчиков обнаружения объектов, и выводит единый набор двухмерного местоположения, углового пространственного положения, размера, скорости и т.п. по отношению к каждому объекту. В частности, блок 43 объединения обнаружений вычисляет, исходя из поведения каждого объекта, полученного от соответствующих датчиков обнаружения объектов, наиболее соответствующее поведение объекта, которое сводит к минимуму ошибку с учетом характеристик ошибки и т.п. соответствующих датчиков обнаружения объектов.
В частности, блок 43 объединения обнаружений всесторонне оценивает результаты обнаружения, полученные от множества типов датчиков, с использованием известной технологии объединения датчиков и, таким образом, получает более точный результат обнаружения.
[0034]
Блок 44 отслеживания объекта отслеживает объект, обнаруженный блоком 40 обнаружения объекта. В частности, блок 44 отслеживания объекта выполняет проверку идентичности (ассоциацию) среди объектов, обнаруженных в разные моменты времени, на основании поведения объекта, выводимого в разные моменты времени, на основе результатов обнаружения, объединенных блоком 43 объединения обнаружений, и на основе ассоциации предсказывает поведение объекта, например, скорость объекта.
Блок 45 обнаружения находящегося впереди транспортного средства обнаруживает находящееся впереди транспортное средство перед собственным транспортным средством 1 из объектов, которые существуют около собственного транспортного средства 1, и которые обнаружены блоком 43 объединения обнаружений и блоком 44 отслеживания объекта, и выводит результат обнаружения в блок 48 управления для предотвращения заслонения.
[0035]
Блок 46 вычисления местоположения на карте оценивает местоположение и угловое пространственное положение собственного транспортного средства 1 на карте из абсолютного положения собственного транспортного средства 1, которое получено блоком 41 оценки местоположения собственного транспортного средства, и картографической информации, которая получена блоком 42 получения карты.
Кроме того, блок 46 вычисления местоположения на карте идентифицирует дорогу, по которой движется собственное транспортное средство 1, а также полосу движения, по которой движется собственное транспортное средство 1, в пределах идентифицированной дороги. Блок 46 вычисления местоположения на карте выводит местоположение и угловое пространственное положение собственного транспортного средства 1 на карте и информацию о полосе движения, по которой движется собственное транспортное средство 1, в блок 48 управления для предотвращения заслонения.
Блок 47 распознавания светофора анализирует захваченное изображение, захваченное камерой 20, и распознает светофор и цвет его свечения. Блок 47 распознавания светофора выводит результат распознавания светофора в блок 48 управления для предотвращения заслонения.
[0036]
Блок 48 управления для предотвращения заслонения выполняет управление для предотвращения заслонения, чтобы предотвратить заслонение светофора перед собственным транспортным средством 1 в диапазоне угла обзора камеры 20 находящимся впереди транспортным средством, на основе картографической информации, полученной блоком 42 получения карты, результата обнаружения, обнаруженного блоком 45 обнаружения находящегося впереди транспортного средства, местоположения собственного транспортного средства 1, идентифицированного блоком 46 вычисления местоположения на карте, и результата распознавания блоком 47 распознавания светофора.
Блок 48 управления для предотвращения заслонения включает в себя блок 51 вычисления обеспечивающей возможность формирования изображения области, блок 52 определения возможности захвата изображения и блок 53 установки величины управления.
[0037]
Блок 51 вычисления обеспечивающей возможность формирования изображения области вычисляет обеспечивающую возможность формирования изображения область, в которой изображение светофора перед собственным транспортным средством 1 может быть захвачено из местоположения на полосе движения, регулируемой светофором, с использованием камеры 20 на основе об оптической информации и информации установки камеры 20 и картографической информации.
Теперь ссылка делается на фиг. 4. Теперь предполагается случай, когда перед собственным транспортным средством 1 имеются светофоры 30a и 30b. Светофоры 30a и 30b представляют собой светофоры, которые регулируют дорожное движение на множестве полос 31 и 32 движения. Полосы 31 и 32 движения являются полосами движения, направления движения которых совпадают и которые являются смежными друг с другом.
[0038]
Блок 51 вычисления обеспечивающей возможность формирования изображения области вычисляет обеспечивающую возможность формирования изображения область относительно каждой из множества полос 31 и 32 движения. Во-первых, будет описано вычисление обеспечивающей возможность формирования изображения области на полосе 31 движения.
Во-первых, блок 51 вычисления обеспечивающей возможность формирования изображения области вычисляет обеспечивающую возможность формирования изображения область 33а, в которой может быть захвачено изображение светофора 30а из множества светофоров 30а и 30b.
Блок 51 вычисления обеспечивающей возможность формирования изображения области вычисляет обеспечивающую возможность формирования изображения область 33а на основе информации о местоположении установки и высоте светофора 30а, структуре дороги и уклона полосы 31 движения, а также оптической информации и информации установки камеры 20.
[0039]
Например, блок 51 вычисления обеспечивающей возможность формирования изображения области может вычислить обеспечивающую возможность формирования изображения область 33а посредством поиска точки на полосе 31 движения, в которой может быть захвачено изображение светофора 30а.
В этом случае блок 51 вычисления обеспечивающей возможность формирования изображения области может определить, что камера 20 может захватить изображение светофора 30а, когда светофор 30а расположен как в вертикальном диапазоне угла обзора, так и в горизонтальном диапазоне угла обзора камеры 20 и определить, что камера 20 не может захватить изображение светофора 30а, когда светофор 30а расположен вне либо вертикального диапазона угла обзора, либо горизонтального диапазона угла обзора.
Теперь ссылка делается на фиг. 5A. Блок 51 вычисления обеспечивающей возможность формирования изображения области определяет, что светофор 30а расположен в вертикальном диапазоне угла обзора камеры 20, когда, например, удовлетворяются приведенные ниже формулы (1) и (2).
[0040]
(xb+x0)tanθ1>ys1-yc . . . (1)
(xb+x0)tanθ2>ys2-yc . . . (2)
В приведенных выше формулах xb - горизонтальное расстояние от собственного транспортного средства 1 до светофора 30а, x0 - продольное расстояние от переднего края собственного транспортного средства 1 до местоположения установки камеры 20, yc - высота местоположения установки камеры 20, ys1 - высота верхнего края светофора 30а и ys2 - высота нижнего края светофора 30а.
[0041]
θ1 - угол места верхнего предела 35 диапазона угла обзора камеры 20 и θ2 - угол места нижнего предела 36 диапазона угла обзора камеры 20.
Следует отметить, что, когда информация о высоте светофора 30а не включена в картографическую информацию, значение, которое можно принять за высоту обычного светофора на основе стандарта установки, установленного административным органом или т.п., может быть использовано в качестве высоты светофора 30а. Например, можно предположить, что ys1 и ys2 равны 5,7 м и 4,7 м соответственно.
Следует отметить, что в этом примере, когда камера 20 зафиксирована относительно собственного транспортного средства 1, продольное расстояние (x0) от переднего края собственного транспортного средства 1 до местоположения установки камеры 20, высота (yc) местоположения установки камеры 20, угол места (θ1) верхнего предела 35 диапазона угла обзора камеры 20 и угол места (θ2) нижнего предела 36 диапазона угла обзора камеры 20 не меняются. То есть, поскольку, когда камера 20 зафиксирована по отношению к собственному транспортному средству 1, вертикальный диапазон угла обзора камеры 20 по отношению к собственному транспортному средству 1 не изменяется, сохранение заранее вертикального диапазона угла обзора камеры 20 по отношению к собственному транспортному средству 1 и обнаружение только горизонтального расстояния (xb) от собственного транспортного средства 1 до светофора 30а позволяет блоку 51 вычисления обеспечивающей возможность формирования изображения области определить, что светофор 30а расположен в вертикальном диапазоне угла обзора камеры 20. Однако, когда камера 20 не зафиксирована, а подвижна относительно собственного транспортного средства 1, или принимается во внимание изменение диапазона угла обзора из-за движения собственного транспортного средства 1 относительно поперечной горизонтальной оси (по тангажу), блок 51 вычисления обеспечивающей возможность формирования изображения области может обнаружить продольное расстояние (x0) от переднего края собственного транспортного средства 1 до местоположения установки камеры 20, высоту (yc) места установки камеры 20, угол места (θ1) верхнего предела 35 диапазона угла обзора камеры 20 и угол места (θ2) нижнего предела 36 диапазона угла обзора камеры 20 и, используя вышеописанные формулы (1) и (2), определить, находится ли светофор 30а в вертикальном диапазоне угла обзора камеры 20.
[0042]
Теперь ссылка делается на фиг. 5B. Блок 51 вычисления обеспечивающей возможность формирования изображения области определяет, расположен ли светофор 30а в пределах горизонтального диапазона угла обзора камеры 20, на основе отклонения в поперечном направлении светофора 30а относительно оптического центра 20c камеры 20, горизонтального расстояния (xb+x0) от камеры 20 до светофора 30a и горизонтального угла обзора θh камеры 20.
В этом случае можно предположить, что собственное транспортное средство 1 расположено в центре полосы 31 движения. Когда информация о местоположении установки светофора 30а, включенная в картографическую информацию, представляет собой двумерные координаты столба 37 светофора 30а, координаты столба 37 могут использоваться в качестве координат светофора 30а.
[0043]
Теперь ссылка делается на фиг. 4. В дальнейшем точка, ближайшая к светофору в обеспечивающей возможность формирования изображения области, упоминается как «ближний конец», а точка, наиболее удаленная от светофора в обеспечивающей возможность формирования изображения области, упоминается как «дальний конец». Ближний конец обеспечивающей возможность формирования изображения области 33а обозначен ссылочной позицией 33с, а дальний конец обеспечивающей возможность формирования изображения области 33а обозначен ссылочной позицией 33d.
Верхний предел расстояния между дальним концом 33d обеспечивающей возможность формирования изображения области 33а и светофором 30а может быть определен с учетом характеристик оптической системы камеры 20. Например, дальний конец 33d может быть установлен в соответствии с минимальным количеством пикселей, необходимых для распознавания светофора 30а на захваченном изображении. Альтернативно, дальний конец 33d может быть установлен таким образом, что расстояние от светофора 30а до дальнего конца 33d равно или меньше порогового значения.
[0044]
Блок 51 вычисления обеспечивающей возможность формирования изображения области также вычисляет относительно светофора 30b обеспечивающую возможность формирования изображения область 33b, в которой изображение светофора 30b может быть захвачено на полосе 31 движения аналогичным образом.
Как описано выше, блок 51 вычисления обеспечивающей возможность формирования изображения области вычисляет обеспечивающие возможность формирования изображения области 33а и 33b, в которых изображения светофоров 30а и 30b могут быть захвачены на полосе 31 движения относительно всех светофоров 30а и 30b, регулирующих дорожное движение на полосе 31 движения, соответственно.
[0045]
Блок 51 вычисления обеспечивающей возможность формирования изображения области вычисляет объединенную область обеспечивающих возможность формирования изображения областей 33a и 33b (то есть область, в которую включена любая точка по меньшей мере какой-либо из обеспечивающих возможность формирования изображения областей 33a и 33b) в качестве обеспечивающей возможность формирования изображения области, в которой изображение по меньшей мере одного из светофоров 30а и 30b, которые регулируют дорожное движение на полосе 31 движения, может быть захвачено на полосе 31 движения.
Блок 51 вычисления обеспечивающей возможность формирования изображения области также вычисляет область 33e наложения обеспечивающих возможность формирования изображения областей 33a и 33b.
[0046]
Теперь ссылка делается на фиг. 6. Затем блок 51 вычисления обеспечивающей возможность формирования изображения области вычисляет обеспечивающую возможность формирования изображения область на полосе 32 движения, которая является смежной с полосой 31 движения.
Как и в случае с полосой 31 движения, блок 51 вычисления обеспечивающей возможность формирования изображения области вычисляет обеспечивающую возможность формирования изображения область 34а, в которой изображение светофора 30а может быть захвачено на полосе 32 движения, и обеспечивающую возможность формирования изображения область 34b, в которой изображение светофора 30b может быть захвачено на полосе 32 движения.
[0047]
Блок 51 вычисления обеспечивающей возможность формирования изображения области вычисляет объединенную область обеспечивающих возможность формирования изображения областей 34a и 34b в качестве обеспечивающей возможность формирования изображения области, в которой изображение по меньшей мере одного из светофоров 30а и 30b, которые регулируют дорожное движение на полосе 32 движения, может быть захвачено на полосе 32 движения.
Блок 51 вычисления обеспечивающей возможность формирования изображения области также вычисляет область 34c наложения обеспечивающих возможность формирования изображения областей 34a и 34b.
[0048]
Теперь ссылка делается на фиг. 3. Блок 52 определения возможности захвата изображения определяет, расположено ли собственное транспортное средство 1 в обеспечивающих возможность формирования изображения областях, вычисленных блоком 51 вычисления обеспечивающей возможность формирования изображения области (например, движется ли собственное транспортное средство 1 в обеспечивающих возможность формирования изображения областях).
В примере на фиг. 4 и 6, блок 52 определения возможности захвата изображения определяет, расположено ли собственное транспортное средство 1 либо в объединенной области обеспечивающих возможность формирования изображения областей 33a и 33b, либо в объединенной области обеспечивающих возможность формирования изображения областей 34a и 34b. То есть блок 52 определения возможности захвата изображения определяет, находится ли собственное транспортное средство 1 в какой-либо из обеспечивающих возможность формирования изображения областей 33a, 33b, 34a и 34b.
[0049]
Когда блок 52 определения возможности захвата изображения определяет, что собственное транспортное средство 1 расположено в обеспечивающей возможность формирования изображения области, блок 53 установки величины управления устанавливает целевую величину управления в управлении движением собственного транспортного средства 1 для управления для предотвращения заслонения в зависимости от состояния распознавания светофоров, распознаваемых блоком 47 распознавания светофора, и результата обнаружения находящегося впереди транспортного средства, обнаруженного блоком 45 обнаружения находящегося впереди транспортного средства.
Блок 53 установки величины управления устанавливает в качестве целевой величины управления, например, целевое расстояние между транспортными средствами между собственным транспортным средством 1 и находящимся впереди транспортным средством или целевое поперечное положение собственного транспортного средства 1 на полосе движения.
Теперь ссылка делается на фиг. 7. Теперь предполагается случай, когда блок 52 определения возможности захвата изображения определил, что собственное транспортное средство 1 расположено в обеспечивающей возможность формирования изображения области, и блок 45 обнаружения находящегося впереди транспортного средства обнаружил находящееся впереди транспортное средство 2.
[0050]
Блок 53 установки величины управления определяет, распознает ли блок 47 распознавания светофора светофор 30а или 30b. Когда блок 53 установки величины управления определяет, что блок 47 распознавания светофора распознает светофор 30a или 30b, блок 53 установки величины управления определяет, что текущее расстояние между транспортными средствами является расстоянием между транспортными средствами, при котором по меньшей мере один из светофоров 30а и 30b не заслонен в диапазоне угла обзора камеры 20 находящимся впереди транспортным средством 2, и устанавливает текущее расстояние между транспортными средствами в качестве целевого расстояния между транспортными средствами.
[0051]
Когда блок 53 установки величины управления определяет, что блок 47 распознавания светофора не распознает ни светофор 30а, ни 30b, блок 53 установки величины управления устанавливает целевую величину управления таким образом, чтобы предотвратить заслонение по меньшей мере одного из светофоров 30а и 30b в диапазоне угла обзора камеры 20 находящимся впереди транспортным средством 2.
Например, когда определено, что собственное транспортное средство 1 расположено в обеспечивающей возможность формирования изображения области 33а, блок 53 установки величины управления вычисляет расстояние между транспортными средствами, при котором светофор 30а не заслоняется находящимся впереди транспортным средством 2, и устанавливает вычисленное расстояние между транспортными средствами в качестве целевого расстояния между транспортными средствами. То есть, когда существует находящееся впереди транспортное средство 2, и блок 47 распознавания светофора не распознает ни светофор 30а, ни светофор 30b, несмотря на то, что собственное транспортное средство 1 расположено в обеспечивающей возможность формирования изображения области, блок 53 установки величины управления определяет что расстояние между движущимся впереди транспортным средством 2 и собственным транспортным средством 1 мало, и светофор 30а заслонен находящимся впереди транспортным средством 2, и увеличивает расстояние между транспортными средствами между находящимся впереди транспортным средством 2 и собственным транспортным средством 1 до расстояние между транспортными средствами, при котором светофор 30а не заслоняется находящимся впереди транспортным средством 2.
[0052]
Теперь ссылка делается на фиг. 8. Например, блок 53 установки величины управления вычисляет расстояние x1 между транспортными средствами, при котором светофор 30a не заслоняется находящимся впереди транспортным средством 2, используя приведенную ниже формулу (3).
x1=(xb+x0)×(yt-yc)/(ys-yc)-x0 . . . (3)
В этой формуле yt обозначает высоту находящегося впереди транспортного средства 2, а ys обозначает высоту светофора 30a.
[0053]
Аналогично, когда определено, что собственное транспортное средство 1 расположено в обеспечивающей возможность формирования изображения области 33b, блок 53 установки величины управления вычисляет расстояние между транспортными средствами, при котором светофор 30b не заслоняется находящимся впереди транспортным средством 2, и устанавливает вычисленное расстояние между транспортными средствами в качестве целевого расстояния между транспортными средствами.
[0054]
Когда определено, что собственное транспортное средство 1 расположено в области 33e наложения обеспечивающих возможность формирования изображения областей 33a и 33b, блок 53 установки величины управления вычисляет либо расстояние между транспортными средствами, при котором светофор 30a не заслоняется находящимся впереди транспортным средством 2, либо расстояние между транспортными средствами, при котором светофор 30b не заслоняется находящимся впереди транспортным средством 2, и устанавливает вычисленное расстояние между транспортными средствами в качестве целевого расстояния между транспортными средствами.
Блок 53 установки величины управления может вычислять как расстояние между транспортными средствами, при котором светофор 30a не заслоняется находящимся впереди транспортным средством 2, так и расстояние между транспортными средствами, при котором светофор 30b не заслоняется находящимся впереди транспортным средством 2, и устанавливать расстояние между транспортными средствами, меньшее, чем другое, из вычисленных расстояний между транспортными средствами, в качестве целевого расстояния между транспортными средствами или устанавливать расстояние между транспортными средствами, большее, чем другое, из них, в качестве целевого расстояния между транспортными средствами.
[0055]
Теперь ссылка делается на фиг. 9. Блок 53 установки величины управления может установить целевое поперечное положение собственного транспортного средства 1 в полосе 31 движения. То есть блок 53 установки величины управления может установить поперечное положение в полосе 31 движения, которое вызывает увеличение отклонения поперечного положения между собственным транспортным средством 1 и находящимся впереди транспортным средством 2, в качестве целевого поперечного положения.
Например, когда определено, что собственное транспортное средство 1 расположено в обеспечивающей возможность формирования изображения области 33a, блок 53 установки величины управления определяет, отклонился ли светофор 30a от центра полосы 31 движения.
[0056]
Когда светофор 30а отклоняется от центра полосы 31 движения (то есть, когда положение светофора 30а в направлении ширины транспортного средства отклоняется от центра полосы 31 движения), блок 53 установки величины управления устанавливает целевое поперечное положение таким образом, что отклонение Δ поперечного положения между собственным транспортным средством 1 и находящимся впереди транспортным средством 2 увеличивается в направлении, в котором светофор 30а отклоняется от центра полосы 31 движения.
Поскольку светофор 30а отклоняется от центра полосы 31 движения в направлении влево, блок 53 установки величины управления устанавливает целевое поперечное положение таким образом, что отклонение Δ увеличивается в направлении влево.
[0057]
Аналогично, когда определено, что собственное транспортное средство 1 расположено в обеспечивающей возможность формирования изображения области 33b, блок 53 установки величины управления определяет, отклонился ли светофор 30b от центра полосы 31 движения.
Когда светофор 30b отклоняется от центра полосы 31 движения, блок 53 установки величины управления устанавливает целевое поперечное положение таким образом, что отклонение Δ поперечного положения между собственным транспортным средством 1 и находящимся впереди транспортным средством 2 увеличивается в направлении, в котором светофор 30b отклоняется от центра полосы 31 движения.
[0058]
Поскольку светофор 30b отклоняется от центра полосы 31 движения в направлении вправо, блок 53 установки величины управления устанавливает целевое поперечное положение таким образом, что отклонение Δ увеличивается в направлении вправо.
Когда определено, что собственное транспортное средство 1 расположено в области 33e наложения обеспечивающих возможность формирования изображения областей 33a и 33b, блок 53 установки величины управления может установить целевое поперечное положение таким образом, что отклонение Δ увеличивается в направлении влево или может установить целевое поперечное положение таким образом, что отклонение Δ увеличивается в направлении вправо.
[0059]
Теперь ссылка делается на фиг. 10. Теперь предполагается случай, когда блок 52 определения возможности захвата изображения определил, что собственное транспортное средство 1 расположено в обеспечивающей возможность формирования изображения области, и блок 45 обнаружения находящегося впереди транспортного средства не обнаружил находящееся впереди транспортное средство 2.
Даже в таком случае блок 47 распознавания светофора иногда не может распознать светофор 30a или 30b в зависимости от условий фотографирования, таких как направление солнечного света, и состояния устройства камеры 20. Таким образом, блок 53 установки величины управления определяет, распознает ли блок 47 распознавания светофора светофор 30а или 30b.
[0060]
Когда блок 53 установки величины управления определяет, что блок 47 распознавания светофора не распознает светофор 30а или 30b, собственное транспортное средство 1 не может проехать дальше стоп-линии 38, соответствующей светофору 30а или 30b, поскольку цвет свечения светофора 30a или 30b не ясен. Когда собственное транспортное средство 1 приближается к светофору 30а за ближним концом 33с обеспечивающей возможность формирования изображения области 33а, камера 20 не может захватить изображение светофора 30а или 30b, даже когда условия фотографирования и состояние устройства улучшаются.
Таким образом, блок 53 установки величины управления устанавливает местоположение, которое находится дальше от светофора 30a, чем другое, из стоп-линии 38 и ближнего конца 33c обеспечивающей возможность формирования изображения области 33a, в качестве целевого местоположения остановки.
[0061]
Теперь ссылка делается на фиг. 11. Когда определено, что собственное транспортное средство 1 не расположено в какой-либо обеспечивающей возможность формирования изображения области, блок 53 установки величины управления подавляет вышеописанное управление для предотвращения заслонения.
Например, даже когда блок 53 установки величины управления определяет, что блок 47 распознавания светофора не распознает ни светофор 30а, ни светофор 30b, блок 53 установки величины управления не изменяет определенное целевое расстояние между транспортными средствами и целевое поперечное положение в автономном управлении движением или управлении движением с постоянной скоростью, независимо от того, заслонен ли светофор 30a или 30b в диапазоне угла обзора камеры 20 находящимся впереди транспортным средством 2.
[0062]
Хотя случай, когда собственное транспортное средство 1 движется по полосе 31 движения, был описан выше, целевая величина управления для управления для предотвращения заслонения может быть установлена аналогичным образом с использованием обеспечивающих возможность формирования изображения областей 34a и 34b и области 34c наложения по отношению к случаю, когда собственное транспортное средство 1 движется по полосе 32 движения.
[0063]
Теперь ссылка делается на фиг. 3. Блок 49 формирования маршрута собственного транспортного средства формирует целевой маршрут движения и профиль скорости собственного транспортного средства 1 таким образом, что собственное транспортное средство 1 движется по полосе движения собственного транспортного средства 1 не сталкиваясь с другим транспортным средством в соответствии с правилами дорожного движения, на основе результата обнаружения объекта около собственного транспортного средства 1 блоком 43 объединения обнаружений и блоком 44 отслеживания объекта и сигналов транспортного средства от датчиков 12 транспортного средства.
В этом случае блок 49 формирования маршрута собственного транспортного средства формирует профиль скорости таким образом, что расстояние между транспортными средствами между собственным транспортным средством 1 и находящимся впереди транспортным средством совпадает с целевым расстоянием между транспортными средствами, установленным блоком 48 управления для предотвращения заслонения.
[0064]
Из-за этой конфигурации, когда светофор заслонен в диапазоне угла обзора камеры 20 находящимся впереди транспортным средством, профиль скорости, который заставляет собственное транспортное средство 1 замедляться таким образом, что расстояние между транспортными средствами между собственным транспортным средством 1 и находящимся впереди транспортным средством увеличивается до значения, превышающего целевое расстояние между транспортными средствами.
Когда светофор не заслонен в диапазоне угла обзора камеры 20 находящимся впереди транспортным средством, формируется профиль скорости, который заставляет собственное транспортное средство 1 поддерживать расстояние между транспортными средствами между собственным транспортным средством 1 и находящимся впереди транспортным средством.
[0065]
Блок 49 формирования маршрута собственного транспортного средства формирует целевой маршрут движения, который заставляет собственное транспортное средство 1 изменять поперечное положение в полосе движения собственного транспортного средства 1 на целевое поперечное положение, установленное блоком 48 управления для предотвращения заслонения.
Из-за этой конфигурации, когда светофор заслонен в диапазоне угла обзора камеры 20 находящимся впереди транспортным средством, целевая траектория движения, которая заставляет отклонение поперечного положения между собственным транспортным средством 1 и находящимся впереди транспортным средством, увеличиваться в направлении, в котором светофор отклоняется от центра полосы движения собственного транспортного средства 1.
Блок 49 формирования маршрута собственного транспортного средства формирует целевой маршрут движения и профиль скорости, которые заставляют собственное транспортное средство останавливаться в целевом местоположении остановки, установленном блоком 48 управления для предотвращения заслонения.
[0066]
Блок 50 управления транспортным средством приводит в действие исполнительные механизмы 19 таким образом, что собственное транспортное средство 1 движется по целевому маршруту движения со скоростью в соответствии с профилем скорости, который сформирован блоком 49 формирования маршрута собственного транспортного средства.
Из-за этой конфигурации, когда, например, расстояние между транспортными средствами между собственным транспортным средством 1 и находящимся впереди транспортным средством больше, чем целевое расстояние между транспортными средствами, установленное блоком 48 управления для предотвращения заслонения, блок 50 управления транспортным средством замедляет собственное транспортное средство 1, управляя исполнительным механизмом управления тормозом.
[0067]
Когда расстояние между транспортными средствами между собственным транспортным средством 1 и находящимся впереди транспортным средством и целевое расстояние между транспортными средствами равны друг другу, блок 50 управления транспортным средством поддерживает расстояние между транспортными средствами до находящегося впереди транспортного средства, управляя исполнительным механизмом открытия акселератора и исполнительным механизмом управления тормозом.
Когда блок 48 управления для предотвращения заслонения устанавливает целевое поперечное положение, блок 50 управления транспортным средством управляет собственным транспортным средством 1, управляя исполнительным механизмом рулевого управления, и заставляет собственное транспортное средство 1 изменить свое поперечное положение на установленное целевое поперечное положение.
Когда блок 48 управления для предотвращения заслонения устанавливает целевое местоположение остановки, блок 50 управления транспортным средством заставляет остановиться собственное транспортное средство в установленном целевом местоположении остановки.
[0068]
Впоследствии, когда расстояние между транспортными средствами между собственным транспортным средством 1 и находящимся впереди транспортным средством совпадает с целевым расстоянием между транспортными средствами, установленным блоком 48 управления для предотвращения заслонения, из-за замедления собственного транспортного средства 1, управляемого блоком 50 управления транспортным средством, блок 53 установки величины управления определяет, распознает ли блок 47 распознавания светофора светофор.
Когда блок 53 установки величины управления определяет, что блок 47 распознавания светофора не распознает светофор, даже когда расстояние между транспортными средствами между собственным транспортным средством 1 и находящимся впереди транспортным средством совпадает с целевым расстоянием между транспортными средствами, считается, что блок 47 распознавания светофора не может распознать светофор из-за фактора, отличного от находящегося впереди транспортного средства (например, условия фотографирования или состояния устройства камеры 20).
[0069]
Таким образом, как и в случае, когда находящееся впереди транспортное средство 2 не обнаружено (фиг. 10), блок 53 установки величины управления устанавливает местоположение, которое находится дальше от светофора 30a, чем другое, из стоп-линии 38 и ближнего конца 33c обеспечивающей возможность формирования изображения области 33a, в качестве целевого местоположения остановки.
То же самое применимо к случаю, когда блок 47 распознавания светофора не может распознать светофор 30а или 30b, даже если в результате увеличения отклонения Δ поперечного положения между собственным транспортным средством 1 и находящимся впереди транспортным средством 2 поперечное положение собственного транспортного средства 1 достигает максимально допустимого поперечного положения.
[0070]
(Функционирование)
Далее будет описан пример способа управления транспортным средством согласно настоящему варианту осуществления со ссылкой на фиг. 12.
На этапе S1 контроллер 18 устанавливает целевое расстояние между транспортными средствами и целевое поперечное положение при автономном управлении движением и управлении движением с постоянной скоростью. Например, контроллер 18 может устанавливать целевое расстояние между транспортными средствами в соответствии со скоростью собственного транспортного средства 1. Кроме того, например, контроллер 18 может устанавливать центр полосы движения собственного транспортного средства 1 в качестве целевого поперечного положения.
[0071]
На этапе S2 блок 42 получения карты получает картографическую информацию о дороге, по которой движется собственное транспортное средство 1.
На этапе S3 блок 47 распознавания светофора получает захваченное изображение, захваченное камерой 20. Блок 47 распознавания светофора анализирует захваченное изображение, захваченное камерой 20, и распознает светофор и цвет его свечения.
На этапе S4 блок 41 оценки местоположения собственного транспортного средства оценивает текущее местоположение собственного транспортного средства 1.
На этапе S5 блок 45 обнаружения находящегося впереди транспортного средства обнаруживает находящееся впереди транспортное средство перед собственным транспортным средством 1.
[0072]
На этапе S6 блок 51 вычисления обеспечивающей возможность формирования изображения области вычисляет обеспечивающую возможность формирования изображения область, в которой изображение светофора может быть захвачено на полосе движения камерой 20.
На этапе S7 блок 52 определения возможности захвата изображения определяет, расположено ли собственное транспортное средство 1 в обеспечивающей возможность формирования изображения области. Когда блок 52 определения возможности захвата изображения определяет, что собственное транспортное средство 1 не расположено в обеспечивающей возможность формирования изображения области (этап S7: Нет) процесс переходит на этап S8.
[0073]
На этапе S8 блок 49 формирования маршрута собственного транспортного средства и блок 50 управления транспортным средством управляют движением собственного транспортного средства в соответствии с целевым расстоянием между транспортными средствами и целевым поперечным положением, установленными на этапе S1. Эта обработка вызывает прекращение управления для предотвращения заслонения, выполняемого блоком 48 управления для предотвращения заслонения. В дальнейшем процесс прекращается.
С другой стороны, когда блок 52 определения возможности захвата изображения определяет, что собственное транспортное средство 1 расположено в обеспечивающей возможность формирования изображения области на этапе S7 (этап S7: Да), процесс переходит на этап S9.
[0074]
На этапе S9 блок 53 установки величины управления определяет, распознает ли блок 47 распознавания светофора светофор. Когда блок 53 установки величины управления определяет, что блок 47 распознавания светофора распознает светофор (этап S9: Да), процесс переходит на этап S10. Когда блок 53 установки величины управления определяет, что блок 47 распознавания светофора не распознает светофор (этап S9: Нет) процесс переходит на этап S12.
На этапе S10 блок 53 установки величины управления определяет, распознает ли блок 45 обнаружения находящегося впереди транспортного средства находящееся впереди транспортное средство 2.
[0075]
Когда блок 53 установки величины управления определяет, что блок 45 обнаружения находящегося впереди транспортного средства распознает находящееся впереди транспортное средство 2 (этап S10: Да), процесс переходит на этап S11. На этапе S11 блок 53 установки величины управления определяет, что текущее расстояние между транспортными средствами является расстоянием между транспортными средствами, при котором светофор не заслонен в диапазоне угла обзора камеры 20 находящимся впереди транспортным средством, и устанавливает текущее расстояние между транспортными средствами в качестве целевого расстояния между транспортными средствами таким образом, чтобы поддерживать текущее расстояние между транспортными средствами. Затем процесс переходит на этап S8.
На этапе S8 блок 49 формирования маршрута собственного транспортного средства и блок 50 управления транспортным средством управляют скоростью собственного транспортного средства 1 таким образом, чтобы поддерживать текущее расстояние между транспортными средствами, установленное в качестве целевого расстояния между транспортными средствами. В дальнейшем процесс прекращается.
[0076]
С другой стороны, когда блок 53 установки величины управления определяет, что блок 45 обнаружения находящегося впереди транспортного средства не распознает находящееся впереди транспортное средство 2 на этапе S10 (этап S10: Нет) процесс переходит на этап S8.
На этапе S8 блок 49 формирования маршрута собственного транспортного средства и блок 50 управления транспортным средством управляют движением собственного транспортного средства в соответствии с целевым расстоянием между транспортными средствами и целевым поперечным положением, установленными на этапе S1. В дальнейшем процесс прекращается.
[0077]
На этапе S12 блок 53 установки величины управления определяет, распознает ли блок 45 обнаружения находящегося впереди транспортного средства находящееся впереди транспортное средство 2. Когда блок 53 установки величины управления определяет, что блок 45 обнаружения находящегося впереди транспортного средства распознает находящееся впереди транспортное средство 2 (этап S12: Да), процесс переходит на этап S13.
На этапе S13 блок 53 установки величины управления вычисляет расстояние между транспортными средствами, при котором светофор 3 не заслоняется находящимся впереди транспортным средством, и устанавливает вычисленное расстояние между транспортными средствами в качестве целевого расстояния между транспортными средствами. Эта обработка вызывает увеличение целевого расстояния между транспортными средствами.
[0078]
Кроме того, блок 53 установки величины управления устанавливает целевое поперечное положение, которое вызывает увеличение отклонения поперечного положения между собственным транспортным средством и находящимся впереди транспортным средством. Затем процесс переходит на этап S8.
На этапе S8 блок 49 формирования маршрута собственного транспортного средства и блок 50 управления транспортным средством заставляют собственное транспортное средство 1 замедляться таким образом, что расстояние между транспортными средствами между собственным транспортным средством 1 и находящимся впереди транспортным средством совпадает с целевым расстоянием между транспортными средствами, установленным блоком 53 установки величины управления.
Альтернативно, блок 49 формирования маршрута собственного транспортного средства и блок 50 управления транспортным средством управляют собственным транспортным средством 1 таким образом, что поперечное положение собственного транспортного средства 1 изменяется на целевое поперечное положение. В дальнейшем процесс прекращается.
[0079]
С другой стороны, когда блок 53 установки величины управления определяет, что блок 45 обнаружения находящегося впереди транспортного средства не обнаруживает находящееся впереди транспортное средство 2 на этапе S12 (этап S12: Нет) процесс переходит на этап S14.
На этапе S14 блок 53 установки величины управления устанавливает местоположение, которое находится дальше от светофора, чем другое, из ближнего конца обеспечивающей возможность формирования изображения области и стоп-линии, в качестве целевого местоположения остановки. Затем процесс переходит на этап S8.
На этапе S8 блок 49 формирования маршрута собственного транспортного средства и блок 50 управления транспортным средством заставляют собственное транспортное средство 1 остановиться в целевом местоположении остановки. В дальнейшем процесс прекращается.
[0080]
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
(1) Блок 47 распознавания светофора распознает светофор на основе изображения, захваченного камерой 20, формирующей изображение в заданном диапазоне угла обзора перед собственным транспортным средством 1. Блок 42 получения карты получает картографическую информацию, включающую в себя информацию о местоположении установки светофора и информацию о полосе движения, которая регулируется светофором. Блок 51 вычисления обеспечивающей возможность формирования изображения области вычисляет обеспечивающую возможность формирования изображения область, в которой изображение светофора может быть захвачено на полосе движения камерой 20, на основе диапазона угла обзора камеры 20, установленной на собственном транспортном средстве 1, и картографической информации. Блок 52 определения возможности захвата изображения определяет, расположено ли собственное транспортное средство 1 в обеспечивающей возможность формирования изображения области.
[0081]
Когда собственное транспортное средство 1 расположено в обеспечивающей возможность формирования изображения области, блок 53 установки величины управления, блок 49 формирования маршрута собственного транспортного средства и блок 50 управления транспортным средством управляют собственным транспортным средством 1 таким образом, что светофор не заслоняется в диапазоне угла обзора камеры 20 находящимся впереди транспортным средством для собственного транспортного средства 1.
Эта конфигурация позволяет предотвратить ненужное выполнение управления для предотвращения заслонения в области, в которой, даже когда на полосе движения нет другого транспортного средства, изображение светофора не может быть первоначально захвачено камерой 20. В результате возможно подавить чувство дискомфорта, которое без необходимости возникает у пассажира собственного транспортного средства 1 посредством управления для предотвращения заслонения.
[0082]
(2) Блок 53 установки величины управления определяет, распознается ли светофор по захваченному изображению, захваченному камерой 20, и, когда светофор распознается по захваченному изображению, блок 49 формирования маршрута собственного транспортного средства и блок 50 управления транспортным средством управляют собственным транспортным средством таким образом, чтобы поддерживать расстояние между транспортными средствами между находящимся впереди транспортным средством и собственным транспортным средством на расстоянии между транспортными средствами, при котором светофор не заслоняется находящимся впереди транспортным средством.
Эта конфигурация позволяет управлять собственным транспортным средством 1 таким образом, что светофор не заслоняется находящимся впереди транспортным средством.
[0083]
(3) Блок 53 установки величины управления определяет, распознается ли светофор по захваченному изображению, захваченному камерой 20, и определяет, существует ли находящееся впереди транспортное средство. Когда собственное транспортное средство 1 расположено в обеспечивающей возможность формирования изображения области, светофор не распознается по захваченному изображению, и существует находящееся впереди транспортное средство, блок 53 установки величины управления, блок 49 формирования маршрута собственного транспортного средства и блок 50 управления транспортным средством управляют собственным транспортным средством 1 таким образом, чтобы увеличить расстояние между транспортными средствами между находящимся впереди транспортным средством и собственным транспортным средством 1.
Эта конфигурация позволяет управлять собственным транспортным средством 1 таким образом, что светофор не заслоняется находящимся впереди транспортным средством.
[0084]
(4) Блок 53 установки величины управления вычисляет расстояние между транспортными средствами, при котором светофор не заслоняется находящимся впереди транспортным средством. Блок 49 формирования маршрута собственного транспортного средства и блок 50 управления транспортным средством посредством замедления собственного транспортного средства 1 в соответствии с расстоянием между транспортными средствами увеличивают расстояние между транспортными средствами между находящимся впереди транспортным средством и собственным транспортным средством.
Эта конфигурация позволяет управлять скоростью собственного транспортного средства 1 таким образом, что светофор не заслоняется находящимся впереди транспортным средством.
[0085]
(5) Блок 53 установки величины управления, блок 49 формирования маршрута собственного транспортного средства и блок 50 управления транспортным средством управляют собственным транспортным средством 1 таким образом, чтобы увеличить отклонение поперечного положения между собственным транспортным средством 1 и находящимся впереди транспортным средством в направлении, в котором светофор отклоняется от центра полосы движения.
Эта конфигурация позволяет управлять собственным транспортным средством 1 таким образом, что светофор не заслоняется находящимся впереди транспортным средством.
[0086]
(6) Когда светофор не может быть распознан по захваченному изображению, даже когда управляют относительным положением собственного транспортного средства 1 относительно находящегося впереди транспортного средства, блок 53 установки величины управления, блок 49 формирования маршрута собственного транспортного средства и блок 50 управления транспортным средством заставляют собственное транспортное средство 1 остановиться в местоположении, которое находится дальше от светофора, чем другое, из стоп-линии, соответствующей светофору, и ближайшей к светофору точке в обеспечивающей возможность формирования изображения области.
Из-за этой конфигурации, когда светофор не может быть распознан из-за фактора, отличного от находящегося впереди транспортного средства, такого как условие фотографирования и состояние устройства, возможно заставить собственное транспортное средство 1 остановиться в точке, в которой светофор расположен в диапазоне угла обзора камеры 20 в пределах диапазона, в котором собственное транспортное средство не пересекает стоп-линию. Эта конфигурация позволяет собственному транспортному средству 1 остановиться в местоположении, в котором изображение светофора может быть захвачено, когда ситуация улучшится.
[0087]
(7) Блок 53 установки величины управления определяет, распознается ли светофор по захваченному изображению, захваченному камерой 20, и определяет, существует ли находящееся впереди транспортное средство. Когда светофор не распознается по захваченному изображению и нет находящегося впереди транспортного средства, блок 53 установки величины управления, блок 49 формирования маршрута собственного транспортного средства и блок 50 управления транспортным средством заставляют собственное транспортное средство 1 остановиться в местоположении, которое находится дальше от светофора, чем другое, из стоп-линии, соответствующей светофору, и ближайшей точки к светофору в обеспечивающей возможность формирования изображения области.
Из-за этой конфигурации, когда светофор не может быть распознан из-за фактора, отличного от находящегося впереди транспортного средства, такого как условие фотографирования и состояние устройства, возможно заставить собственное транспортное средство 1 остановиться в точке, в которой светофор расположен в диапазоне угла обзора камеры 20 в пределах диапазона, в котором собственное транспортное средство не пересекает стоп-линию. Эта конфигурация позволяет собственному транспортному средству 1 остановиться в местоположении, в котором изображение светофора может быть захвачено, когда ситуация улучшится.
[0088]
(8) Блок 42 получения карты получает информацию о местоположениях установки множества светофоров, регулирующих дорожное движение на полосе движения, из картографической информации. Блок 51 вычисления обеспечивающей возможность формирования изображения области вычисляет обеспечивающую возможность формирования изображения область относительно каждого из множества светофоров. Когда собственное транспортное средство 1 расположено в любой из обеспечивающих возможность формирования изображения областей, блок 53 установки величины управления, блок 49 формирования маршрута собственного транспортного средства и блок 50 управления транспортным средством управляют собственным транспортным средством 1 таким образом, что светофор не заслоняется в диапазоне угла обзора камеры 20 находящимся впереди транспортным средством.
Поскольку требуется управлять собственным транспортным средством 1 только таким образом, чтобы любой из множества светофоров не был заслонен, количество альтернатив в управлении движением собственного транспортного средства 1 увеличивается.
[0089]
(9) Блок 51 вычисления обеспечивающей возможность формирования изображения области вычисляет обеспечивающую возможность формирования изображения область относительно каждой из множества полос движения, регулируемых светофором.
Поскольку требуется управлять собственным транспортным средством 1 только таким образом, чтобы светофор не заслонялся на любой из множества полос движения, количество альтернатив в управлении движением собственного транспортного средства 1 увеличивается.
[0090]
Все примеры и условные формулировки, представленные в данном документе, предназначены для педагогических целей, чтобы помочь читателю понять изобретение и концепции, внесенные изобретателем в развитие данной области техники, и они не должны рассматриваться как ограничения такими конкретно перечисленными примерами и условиями, а организация таких примеров в описании не связана с демонстрацией превосходства или неполноценности данного изобретения. Хотя один или более вариантов осуществления настоящего изобретения были описаны подробно, следует понимать, что в изобретение могут быть внесены различные изменения, замены и модификации, не выходящие за рамки сущности и объема данного изобретения.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
[0091]
1 Собственное транспортное средство
2 Находящееся впереди транспортное средство
3 Светофор
10 Устройство управления транспортным средством
11 Датчик объектов
12 Датчик транспортного средства
13 Устройство определения местоположения
14 Картографическая база данных
15 Устройство связи
17 Навигационная система
18 Контроллер
19 Исполнительный механизм
20 Камера
21 Процессор
22 Запоминающее устройство
40 Блок обнаружения объекта
41 Блок оценки местоположения собственного транспортного средства
42 Блок получения карты
43 Блок объединения обнаружений
44 Блок отслеживания объекта
45 Блок обнаружения находящегося впереди транспортного средства
46 Блок вычисления местоположения на карте
47 Блок распознавания светофора
48 Блок управления для предотвращения заслонения
49 Блок формирования маршрута собственного транспортного средства
50 Блок управления транспортным средством
51 Блок вычисления обеспечивающей возможность формирования изображения области
52 Блок определения возможности захвата изображения
53 Блок установки величины управления



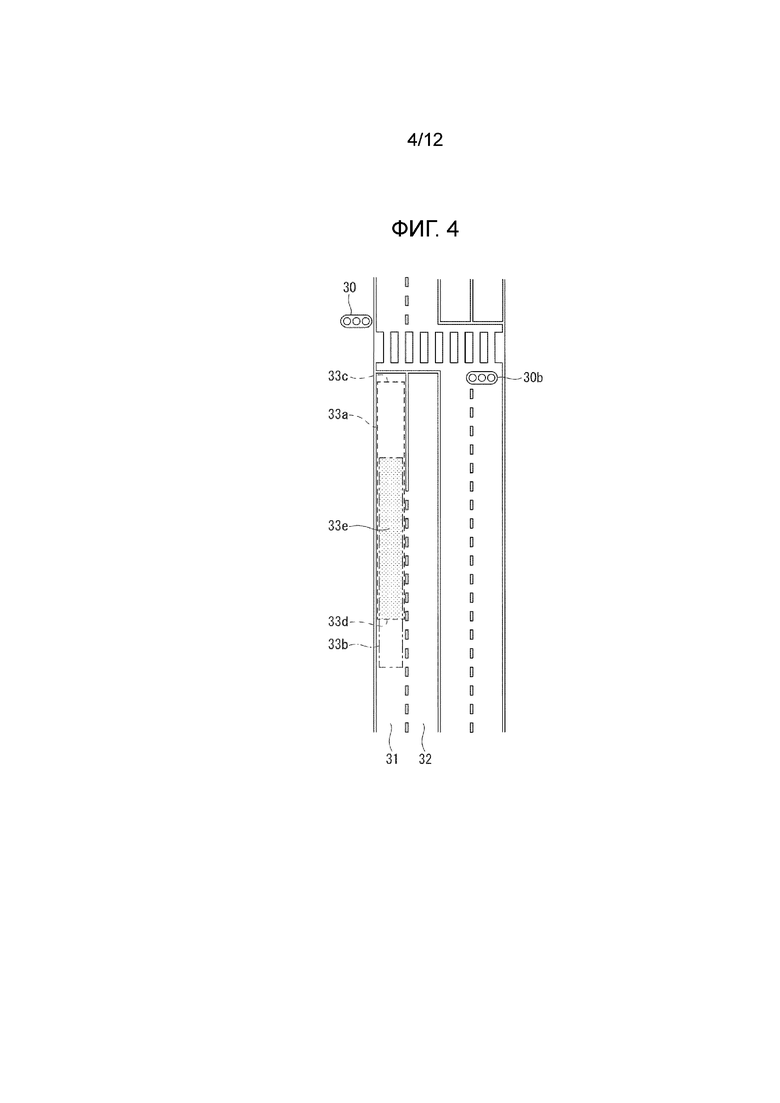

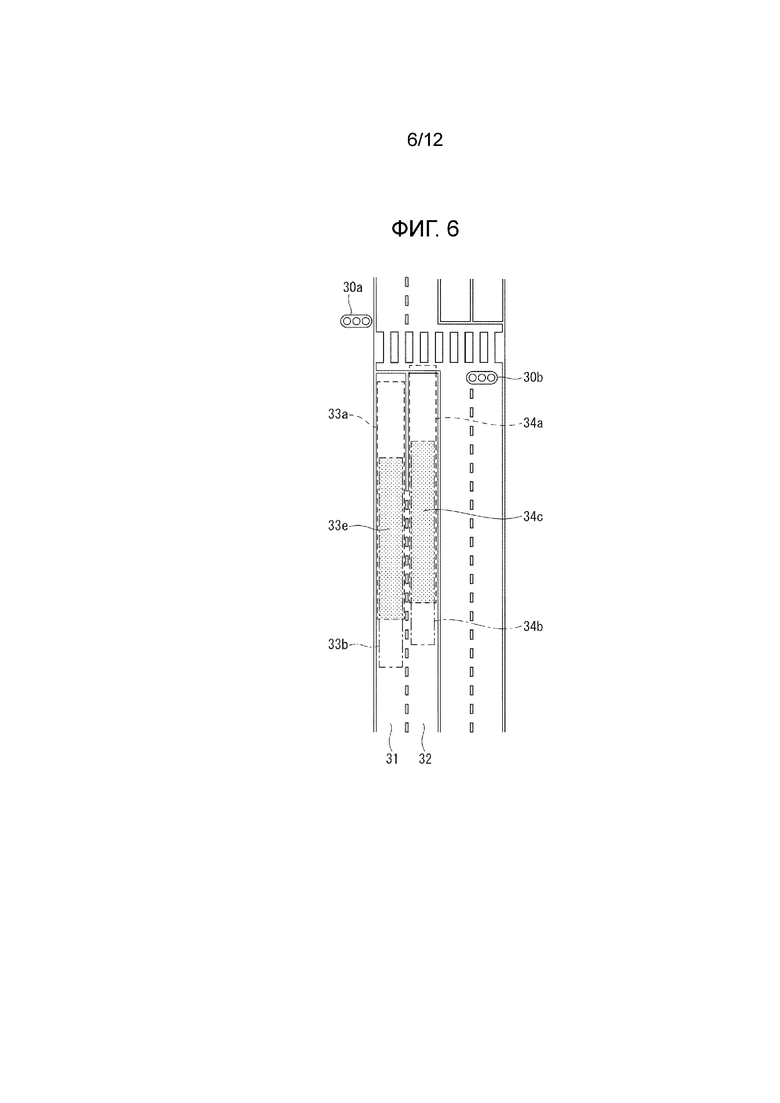
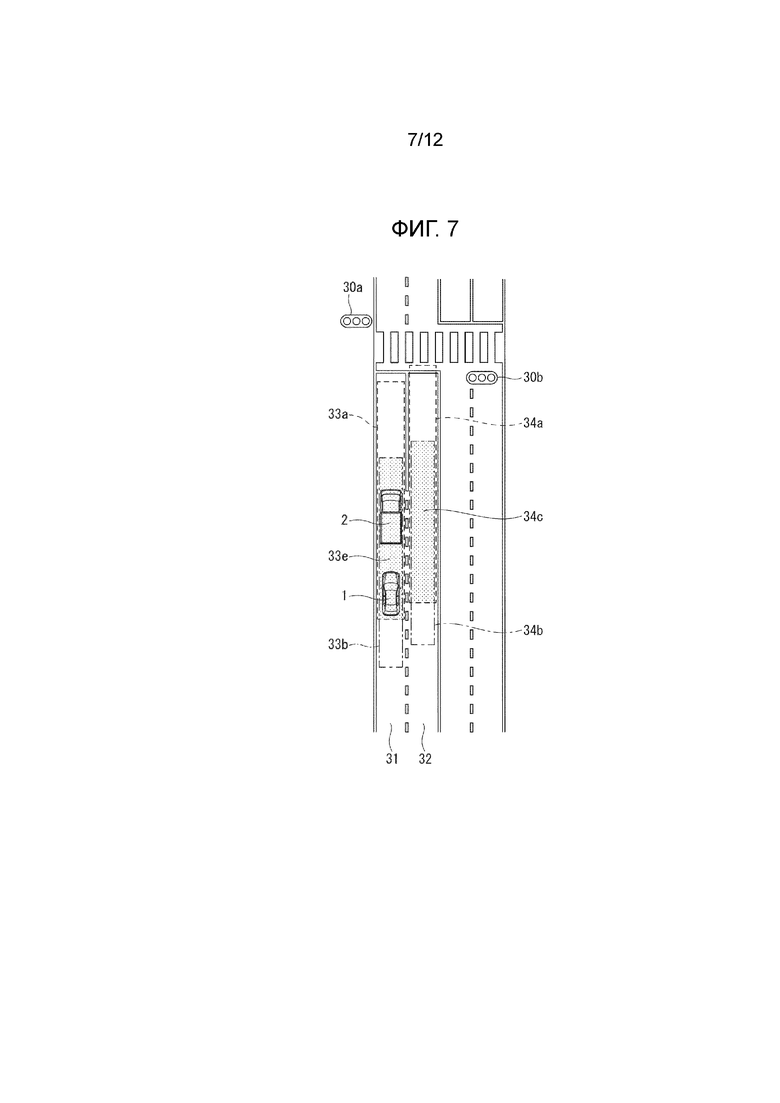




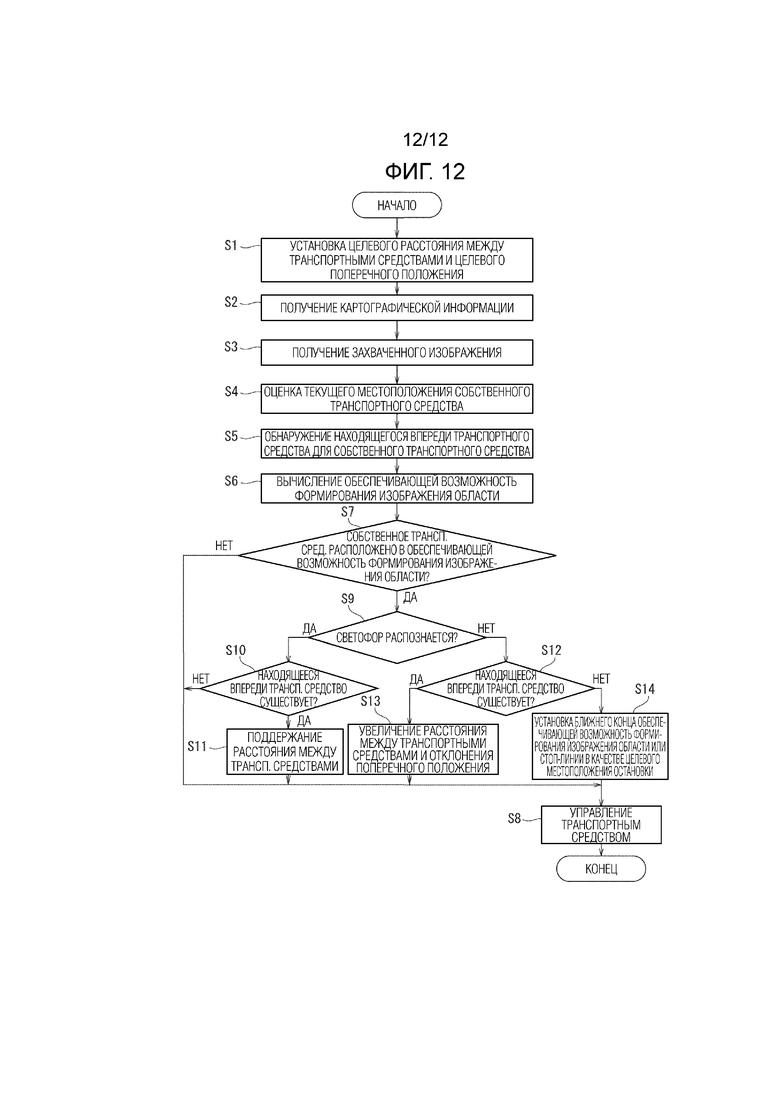
Изобретение относится к способу управления устройством и устройству управления транспортным средством (ТС). Способ управления ТС включает в себя несколько этапов. На основе картографической информации, включающей в себя информацию о местоположении установки светофора и информацию о полосе движения, регулируемой светофором, и диапазона угла обзора камеры, установленной на собственном транспортном средстве, вычисляют обеспечивающую возможность формирования изображения область, в которой изображение светофора может быть захвачено на полосе движения камерой. Затем определяют, расположено ли собственное ТС в обеспечивающей возможность формирования изображения области. Когда собственное ТС расположено в обеспечивающей возможность формирования изображения области, происходит управление собственным ТС таким образом, что светофор не заслоняется в диапазоне угла обзора камеры находящимся впереди ТС для собственного ТС. Повышается безопасность при эксплуатации ТС. 2 н. и 8 з.п. ф-лы, 13 ил.
1. Способ управления транспортным средством, в котором камера, выполненная с возможностью захвата изображения с заданным диапазоном угла обзора перед собственным транспортным средством, установлена на собственном транспортном средстве, и светофор распознается на основе изображения, захваченного камерой, при этом упомянутый способ содержит этапы, на которых:
на основе картографической информации, включающей в себя информацию о местоположении установки светофора и информацию о полосе движения, регулируемой светофором, и диапазона угла обзора камеры, установленной на собственном транспортном средстве, вычисляют обеспечивающую возможность формирования изображения область, в которой изображение светофора может быть захвачено на полосе движения камерой;
определяют, расположено ли собственное транспортное средство в обеспечивающей возможность формирования изображения области; и
когда собственное транспортное средство расположено в обеспечивающей возможность формирования изображения области, управляют собственным транспортным средством таким образом, что светофор не заслоняется в диапазоне угла обзора камеры находящимся впереди транспортным средством для собственного транспортного средства.
2. Способ управления транспортным средством по п. 1, содержащий этапы, на которых:
определяют, распознается ли светофор по захваченному изображению, захваченному камерой; и
когда светофор распознается по захваченному изображению, управляют собственным транспортным средством таким образом, чтобы поддерживать расстояние между транспортными средствами между находящимся впереди транспортным средством и собственным транспортным средством на расстоянии между транспортными средствами, при котором светофор не заслоняется находящимся впереди транспортным средством.
3. Способ управления транспортным средством по п. 1, содержащий этапы, на которых:
определяют, распознается ли светофор по захваченному изображению, захваченному камерой;
определяют, существует ли находящееся впереди транспортное средство; и
когда собственное транспортное средство расположено в обеспечивающей возможность формирования изображения области, светофор не распознается по захваченному изображению, и находящееся впереди транспортное средство существует, управляют собственным транспортным средством таким образом, чтобы увеличить расстояние между транспортными средствами между находящимся впереди транспортным средством и собственным транспортным средством.
4. Способ управления транспортным средством по п. 3, в котором упомянутый способ посредством вычисления расстояния между транспортными средствами, при котором светофор не заслоняется находящимся впереди транспортным средством, и замедления собственного транспортного средства в соответствии с расстоянием между транспортными средствами, увеличивает расстояние между транспортными средствами между находящимся впереди транспортным средством и собственным транспортным средством.
5. Способ управления транспортным средством по п. 3 или 4, содержащий этап, на котором управляют собственным транспортным средством таким образом, чтобы увеличить отклонение поперечного положения между собственным транспортным средством и находящимся впереди транспортным средством в направлении, в котором светофор отклоняется от центра полосы движения.
6. Способ управления транспортным средством по любому из пп. 3-5, в котором, когда светофор не может быть распознан по захваченному изображению, даже когда управляют относительным положением собственного транспортного средства по отношению к находящемуся впереди транспортному средству, упомянутый способ заставляет собственное транспортное средство остановиться в местоположении, причем это местоположение находится дальше от светофора, чем другое, из стоп-линии, соответствующей светофору, и ближайшей к светофору точки в обеспечивающей возможность формирования изображения области.
7. Способ управления транспортным средством по п. 1, содержащий этапы, на которых:
определяют, распознается ли светофор по захваченному изображению, захваченному камерой;
определяют, существует ли находящееся впереди транспортное средство; и
когда светофор не распознается по захваченному изображению, и находящееся впереди транспортное средство не существует, заставляют собственное транспортное средство остановиться в местоположении, причем это местоположение находится дальше от светофора, чем другое, из стоп-линии, соответствующей светофору, и ближайшей к светофору точки в обеспечивающей возможность формирования изображения области.
8. Способ управления транспортным средством по любому из пп. 1-7, в котором
упомянутый способ вычисляет обеспечивающую возможность формирования изображения область относительно каждого из множества светофоров, регулирующих полосу движения, и
когда собственное транспортное средство расположено в любой из обеспечивающих возможность формирования изображения областей, упомянутый способ управляет собственным транспортным средством таким образом, что светофор не заслоняется в диапазоне угла обзора камеры находящимся впереди транспортным средством.
9. Способ управления транспортным средством по любому из пп. 1-8, в котором упомянутый способ вычисляет обеспечивающую возможность формирования изображения область по отношению к каждой из множества полос движения, регулируемых светофором.
10. Устройство управления транспортным средством, содержащее:
камеру, установленную на собственном транспортном средстве и выполненную с возможностью захвата изображения с заданным диапазоном угла обзора перед собственным транспортным средством; и
контроллер, выполненный с возможностью вычисления на основе картографической информации, включающей в себя информацию о местоположении установки светофора и информацию о полосе движения, регулируемой светофором, и диапазона угла обзора камеры обеспечивающей возможность формирования изображения области, в которой изображение светофора может быть захвачено на полосе движения камерой, определения, находится ли собственное транспортное средство в обеспечивающей возможность формирования изображения области, управления собственным транспортным средством таким образом, чтобы светофор не заслонялся в диапазоне угла обзора камеры находящимся впереди транспортным средством для собственного транспортного средства, когда собственное транспортное средство расположено в обеспечивающей возможность формирования изображения области, и распознавания светофора на основе изображения, захваченного камерой.
| JP 2009001245 A, 08.01.2009 | |||
| JP 2016049933 A, 11.04.2016 | |||
| US 9409571 B2, 09.08.2016 | |||
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Вакуум-присос для подъема грузов | 1958 |
|
SU116258A1 |

