[0001] Область техники, к которой относится изобретение
Настоящее изобретение относится к способу управления транспортным средством и устройству управления транспортным средством.
УРОВЕНЬ ТЕХНИКИ
[0002] Известно устройство управления движением транспортного средства для смены полосы движения на соседнюю полосу движения в заторе в уличном движении (дорожном заторе ), прилегающую к полосе движения, в которой происходит его движение, при этом транспортное средство движется по полосе движения, в которой происходит его движение (Патентный документ 1). Когда устройство управления определяет, что для транспортного средства нет пространства для проезда, устройство управления перемещает транспортное средство по заранее определенной траектории движения, чтобы сменить полосу движения, и удерживает транспортное средство в состоянии ожидания на границе полос движения между полосой движения, в которой происходит его движение, и соседней полосой движения или в местоположении ожидания в пределах предварительно определенного расстояния от линии границы полос движения на полосе движения в которой происходит его движение. Когда устройство управления обнаруживает пространство, когда транспортное средство находится в режиме ожидания, устройство управления перемещает транспортное средство из местоположения ожидания в это пространство.
[ДОКУМЕНТ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ]
[ПАТЕНТНЫЙ ДОКУМЕНТ]
[0003] [Патентный документ 1] JP2016-203745A
[СУЩНОСТЬ ИЗОБРЕТЕНИЯ]
[ЗАДАЧА, КОТОРУЮ РЕШАЕТ ИЗОБРЕТЕНИЕ]
[0004] Устройство управления транспортным средством начинает перемещение транспортного средства после обнаружения пространства. Это может привести к вероятности пропуска смены полосы движения из-за исчезновения пространства сразу после начала перемещения.
[0005] Задача, решаемая настоящим изобретением, состоит в том, чтобы предоставить способ управления транспортным средством и устройство управления транспортным средством, которые уменьшают вероятность пропуска смены полосы движения.
[СРЕДСТВА ДЛЯ РЕШЕНИЯ ЗАДАЧИ]
[0006] Для решения вышеупомянутых задач аспект настоящего изобретения получает информацию об окружении рассматриваемого транспортного средства, задает местоположение въезда, расположенное на второй полосе движения, соседней с первой полосой движения, по которой движется рассматриваемое транспортное средство, в соответствии с информацией об окружении рассматриваемого транспортного средства, причем местоположение въезда указывает местоположение, в которое въезжает рассматриваемое транспортное средство, задает переднее транспортное средство, расположенное перед местоположением въезда, и заднее транспортное средство, расположенное позади местоположения въезда среди других транспортных средств, определяет состояние движения каждого из переднего транспортного средства и заднего транспортного средства, определяет, имеется ли пространство въезда рассматриваемого транспортного средства в местоположении въезда, предсказывает, начинает ли переднее транспортное средство движение, когда переднее транспортное средство и заднее транспортное средство определены как стоящие, и определено, что нет пространства в местоположении въезда, и начинает перемещение рассматриваемого транспортного средства в местоположение въезда, когда предсказано, что переднее транспортное средство начинает движение.
[ЭФФЕКТ ИЗОБРЕТЕНИЯ]
[0007] Аспект настоящего изобретения позволяет снизить вероятность пропуска смены полосы движения.
[КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ]
Фиг. 1 - блок-схема примера системы транспортного средства, включающей в себя устройство управления транспортным средством согласно первому варианту осуществления.
Фиг. 2A - это блок-схема последовательности операций процесса управления, выполняемого устройством управления транспортным средством согласно первому варианту осуществления настоящего изобретения.
Фиг. 2B - это блок-схема последовательности операций процесса управления, выполняемого устройством управления транспортным средством согласно первому варианту осуществления.
Фиг. 3 - пример движения рассматриваемого транспортного средства, когда выполняется процесс, показанный на фиг. 2А и фиг. 2B.
Фиг. 4 - пример движения рассматриваемого транспортного средства, когда выполняется процесс, показанный на фиг. 2А и фиг. 2B.
Фиг. 5A - блок-схема последовательности операций процесса управления, выполняемого устройством управления транспортным средством, согласно второму варианту осуществления настоящего изобретения;
Фиг. 5B - блок-схема последовательности операций процесса управления, выполняемого устройством управления транспортным средством, согласно второму варианту осуществления.
Фиг. 6 - пример движения рассматриваемого транспортного средства, когда выполняется процесс, показанный на фиг. 5A и фиг. 5В.
Фиг. 7 - пример движения рассматриваемого транспортного средства, когда выполняется процесс, показанный на фиг. 5A и фиг. 5В.
[ПРИМЕР(Ы) ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ]
[0009]<Первый вариант осуществления>
В дальнейшем варианты осуществления настоящего изобретения будут описаны со ссылкой на чертежи. Настоящий вариант осуществления будет описан на примере устройства управления транспортным средством, установленного на транспортном средстве.
[0010] Фиг. 1 является блок-схемой, иллюстрирующей пример системы 200 транспортного средства, включающей в себя контроллер 100 транспортного средства, согласно варианту осуществления настоящего изобретения. Система 200 транспортного средства согласно настоящему варианту осуществления установлена на транспортном средстве. Система 200 транспортного средства представляет собой систему, позволяющую транспортному средству автоматически менять полосу движения.
[0011] Как показано на фиг. 1, система 200 транспортного средства согласно настоящему варианту осуществления включает в себя группу 10 датчиков среды окружения, группу 20 датчиков транспортного средства, навигационную систему 30, картографическую базу 40 данных, HMI 50, контроллер 60 исполнительных механизмов, группу 70 исполнительных механизмов управления транспортным средством, указатель 80 поворота и контроллер 100 транспортного средства. Эти устройства или системы связаны друг с другом с помощью сети управления (CAN) или другой локальной сети (LAN) в транспортном средстве для взаимного обмена информацией.
[0012] Группа 10 датчиков среды окружения представляет собой группу датчиков для определения состояния (внешнего состояния) окружения рассматриваемого транспортного средства, она обеспечена в транспортном средстве. Как показано на фиг. 1, группа 10 датчиков среды окружения может включать в себя, например, радар 11 и устройство 12 формирования изображения.
[0013] Радар 11 обнаруживает объекты вокруг рассматриваемого транспортного средства. Радар 11 может включать в себя, например, радар миллиметрового диапазона, лазерный радар, ультразвуковой радар и лазерный дальномер. Радар 11 обнаруживает объект, например, путем передачи радиоволн в окружающую среду рассматриваемого транспортного средства и приема радиоволн, отраженных объектом. В частности, радар 11 определяет направление и расстояние до объекта. Радар 11 также определяет относительную скорость (включая направление движения) объекта относительно его транспортного средства на основе направления на объект и изменения во времени расстояния до объекта. Радар 11 выводит обнаруженные результаты в контроллер 100 транспортного средства.
[0014] В настоящем варианте осуществления радар 11 предназначен для обнаружения во всех направлениях от рассматриваемого транспортного средства. Например, радар 11 обеспечен спереди, сбоку и сзади транспортного средства, соответственно, и состоит из переднего радара для обнаружения объекта впереди транспортного средства, бокового радара для обнаружения объекта сбоку от транспортного средства и задний радар для обнаружения объекта сзади транспортного средства. Количество и тип радаров 11, включенных в рассматриваемое транспортное средство, в частности не ограничены.
[0015] Устройство 12 формирования изображения формирует изображение объекта вокруг транспортного средства. Устройство 12 формирования изображения может включать в себя, например, камеру, содержащую ПЗС или КМОП устройство формирования изображения . Захваченное изображение, захваченное устройством 12 формирования изображения, выводится в контроллер 100 транспортного средства.
[0016] В настоящем варианте осуществления устройство 12 формирования изображения предназначено для формирования изображения во всех направлениях от рассматриваемого транспортного средства. Например, устройство 12 формирования изображения предоставляется впереди транспортного средства, сбоку и сзади, соответственно, и состоит из передней камеры для изображения объекта перед транспортным средством, боковой камеры для отображения объекта сбоку от транспортного средства. транспортное средство, задняя камера для обнаружения объекта в задней части транспортного средства. Количество и тип устройств 12 формирования изображения, включенных в рассматриваемое транспортное средство, в частности не ограничено.
[0017] Объекты, обнаруживаемые группой 10 датчиков среды окружения, включают, например, велосипеды, мотоциклы, транспортные средства (в дальнейшем также называемые другими транспортными средствами), дорожные препятствия, светофоры, дорожную разметку (включая границы полос движения) и пешеходные переходы. Например, когда другое транспортное средство движется вдоль направления движения рассматриваемого транспортного средства около рассматриваемого транспортного средства, радар 11 определяет направление и расстояние до другого транспортного средства, а также относительную скорость другого транспортного средства относительно рассматриваемого транспортного средства на основе местоположения рассматриваемого транспортного средства. Кроме того, устройство 12 формирования изображения захватывает изображение, позволяющее определять тип транспортного средства у другого транспортного средства, размер другого транспортного средства и форму другого транспортного средства.
[0018] Кроме того, например, когда рассматриваемое транспортное средство движется по конкретной полосе движения из множества полос движения, радар 11 обнаруживает линию границы полос движения, отделяющую полосу движения, по которой движется рассматриваемое транспортное средство, и полосу движения, расположенную сбоку от полосы движения, а также определяет расстояние от объекта съемки до границы полос движения. Кроме того, устройство 12 формирования изображения захватывает изображение, на котором может быть указан тип линии границы полос движения. Когда полоса движения, по которой движется рассматриваемое транспортное средство, имеет линии границы полос движения с обеих сторон, радар 11 обнаруживает каждое из расстояний от рассматриваемого транспортного средства до линий границы полос движения. Кроме того, в нижеследующем описании полоса движения, по которой движется рассматриваемое транспортное средство, упоминается как рассматриваемая полоса движения, а полоса движения, расположенная сбоку от рассматриваемой полосы движения, упоминается как соседняя полоса движения.
[0019] Группа 20 датчиков транспортного средства является группой датчиков для определения состояния рассматриваемого транспортного средства (внутреннего состояния). Как показано на фиг. 1, группа 20 датчиков транспортного средства может включать в себя датчик 21 скорости транспортного средства, акселерометр 22, гироскопический датчик 23, датчик 24 угла поворота рулевого колеса, датчик 25 акселератора и датчик 26 тормоза.
[0020] Датчик 21 скорости транспортного средства измеряет скорость вращения системы привода, такой как ведущий вал, и определяет скорость движения рассматриваемого транспортного средства на основе результата измерения. Датчик 21 скорости транспортного средства предусмотрен, например, на приводном валу, вращающемся как одно целое с колесами или колесами рассматриваемого транспортного средства. Акселерометр 22 определяет ускорение рассматриваемого транспортного средства. Акселерометр 22 включает в себя продольный акселерометр для обнаружения ускорения в продольном направлении рассматриваемого транспортного средства и поперечный акселерометр для обнаружения поперечного ускорения рассматриваемого транспортного средства. Гироскопический датчик 23 определяет скорость вращения рассматриваемого транспортного средства, то есть величину перемещения (угловую скорость) под углом рассматриваемого транспортного средства в единицу времени. Датчик 24 угла поворота рулевого колеса определяет угол поворота рулевого колеса. Датчик 24 угла поворота рулевого колеса, например, предусмотрен на рулевом валу рассматриваемого транспортного средства. Датчик 25 акселератора определяет величину нажатия (положение педали акселератора) педали акселератора. Датчик 25 акселератора предусмотрен, например, на оси педали акселератора. Датчик 26 тормоза определяет величину нажатия педали тормоза (положение педали тормоза). Датчик 26 тормоза предусмотрен, например, на оси педали тормоза.
[0021] Результат обнаружения, обнаруженный группой 20 датчиков транспортного средства, выводится в контроллер 100 транспортного средства. Результаты обнаружения могут включать в себя, например, скорость транспортного средства, ускорение (включая продольное и поперечное ускорение), угловую скорость, величину нажатия педали акселератора и величину нажатия педали тормоза рассматриваемого транспортного средства.
[0022] Навигационная система 30 представляет собой систему для указания пути человеку (включая водителя), находящемуся в рассматриваемом транспортном средстве, путем указания маршрута от текущего местоположения рассматриваемого транспортного средства до пункта назначения на основе информации о текущем местоположении рассматриваемого транспортного средства. Навигационная система 30 получает картографическую информацию, вводимую из картографической базы 40 данных, которая будет описана ниже, и информацию о пункте назначения, вводимую через HMI 50 от человека, находящегося в рассматриваемом транспортном средстве. Навигационная система 30 генерирует маршрут движения рассматриваемого транспортного средства на основе введенной информации. Затем навигационная система 30 выводит информацию о маршруте движения рассматриваемого транспортного средства в контроллер 100 транспортного средства и представляет информацию о маршруте движения рассматриваемого транспортного средства человеку, находящемуся в рассматриваемом транспортном средстве, через HMI 50. Таким образом, находящемуся в транспортном средстве человеку предоставляется маршрут движения от текущего местоположения до пункта назначения.
[0023] Как показано на фиг. 1, навигационная система 30 включает в себя GPS 31, коммуникатор 32 и навигационный контроллер 33.
[0024] GPS 31 получает данные о местоположении (глобальная система определения местоположения, GPS), которые указывают текущее местоположение рассматриваемого транспортного средства. GPS 31 получает данные о местоположении рассматриваемого транспортного средства путем приема приемником радиоволн, периодически передаваемых от множества спутниковых систем связи. Кроме того, GPS 31 может обнаруживать изменения в позиционной информации рассматриваемых транспортных средств путем приема радиоволн, периодически передаваемых от множества спутниковых систем связи.
[0025] Коммуникатор 32 получает информацию о состоянии окружения транспортного средства снаружи. Коммуникатор 32 представляет собой, например, сервер или систему, установленную вне транспортного средства, или устройство, способное связываться с коммуникатором, установленным на другом транспортном средстве.
[0026] Например, коммуникатор 32 получает информацию о дорожном движении из системы передачи информации о дорожном движении (Система информации и связи транспортного средства, VICS (зарегистрированная торговая марка), далее то же самое) с помощью устройства передачи информации (маяка) или FM-мультиплексного вещания или тому подобного, обеспеченного на дороге. Информация о дорожном движении может включать, например, информацию о дорожном заторе в полосах движения, информацию об авариях, информацию о неисправном транспортном средстве, строительную информацию, информацию о регулировании скорости, информацию о регулировании полосы движения и т.д. Следует отметить, что информация о дорожном движении не обязательно включает в себя каждую из вышеупомянутой информации и может включать по меньшей мере любую из вышеупомянутой информации.
[0027] Примеры информации о дорожном заторе могут включать в себя информацию о зоне, где происходит дорожный затор, расстояние до дорожного затора и требуемое время, пока транспортное средство не проедет через дорожный затор. Примеры информации об аварии могут включать в себя информацию о зоне, где произошла авария, содержание аварии и время, необходимое для того, чтобы покинуть зону. Примеры информации о неисправном транспортном средстве могут включать в себя информацию об области, где существует неисправное транспортное средство, номер неисправного транспортного средства и время, необходимое для выезда из зоны. Примеры информации о регулировании скорости могут включать в себя информацию об области, подлежащей регулированию скорости, и временной зоне регулирования скорости. Примеры строительной информации могут включать информацию о строящейся территории, часовом поясе, в котором ведется строительство, и времени, необходимом для того, чтобы покинуть эту зону.
[0028] Кроме того, например, коммуникатор 32 получает от коммуникатора, установленного на другом транспортном средстве, информацию об относительной скорости другого транспортного средства по отношению к рассматриваемому транспортному средству, информацию об относительном местоположении другого транспортного средства относительно рассматриваемого транспортного средства, и тому подобное. Такая связь, осуществляемая рассматриваемым транспортным средством и другим транспортным средством, называется связью между транспортными средствами. Коммуникатор 32 посредством связи между транспортными средствами получает информацию, такую как скорость другого транспортного средства, в качестве информации об окружении транспортного средства.
[0029] Информация, такая как относительная скорость другого транспортного средства, может быть получена другим способом. Например, коммуникатор 32 может получать информацию, включающую в себя местоположение другого транспортного средства, скорость транспортного средства и направление движения, от VICS в качестве информации об окружении рассматриваемого транспортного средства. Тип информации, получаемой коммуникатором 32, не ограничивается вышеуказанным типом. Например, коммуникатор 32 может также получать информацию о погоде в области, где движется рассматриваемое транспортное средство, от сервера, распространяющего информацию о погоде.
[0030] Навигационный контроллер 33 представляет собой компьютер, который генерирует маршрут движения от текущего местоположения рассматриваемого транспортного средства до пункта назначения. Например, навигационный контроллер 33 может включать в себя ПЗУ (постоянное запоминающее устройство), в котором хранится программа для генерации пути движения, ЦП (центральный процессор), который выполняет программу, хранящуюся в ПЗУ, и ОЗУ (оперативное запоминающее устройство), которое функционирует как запоминающее устройство с произвольным доступом.
[0031] Навигационный контроллер 33 получает информацию о текущем местоположении рассматриваемого транспортного средства, вводимую из GPS 31, информацию о дорожном движении, вводимую из коммуникатора 32, картографическую информацию, вводимую из картографической базы 40 данных, и информацию о пункте назначения транспортного средства, вводимую из HMI 50. Например, предполагается, что находящийся в рассматриваемом транспортном средстве человек установил пункт назначения рассматриваемого транспортного средства через HMI 50. Контроллер 33 навигации генерирует маршрут от текущего местоположения до пункта назначения в полосе движения в качестве маршрута движения рассматриваемого транспортного средства в соответствии с информацией о местоположении рассматриваемого транспортного средства, информацией о пункте назначения рассматриваемого транспортного средства, картографической информацией и информации о дорожном движении. Навигационный контроллер 33 выводит сгенерированную информацию о маршруте движения в контроллер 100 транспортного средства и представляет информацию находящемуся в транспортном средстве человеку через HMI 50.
[0032] В настоящем варианте осуществления маршрут движения рассматриваемого транспортного средства может быть любым маршрутом при условии, что транспортное средство может прибыть в пункт назначения из текущего местоположения, и другие условия не ограничены. Например, навигационный контроллер 33 может генерировать маршрут движения рассматриваемого транспортного средства в соответствии с условиями, установленными находящимся в транспортном средстве человеком. Например, когда находящийся в транспортном средстве человек предпочитает использовать платную дорогу для прибытия в пункт назначения, навигационный контроллер 33 может сгенерировать маршрут движения, используя платную дорогу, на основе картографической информации. Кроме того, например, навигационный контроллер 33 на основе информации о дорожном движении может генерировать маршрут движения рассматриваемого транспортного средства. Например, когда на пути кратчайшего маршрута к месту назначения возникает дорожный затор, навигационный контроллер 33 может искать маршрут объезда и генерировать маршрут, имеющий самое короткое требуемое время, из множества объездных маршрутов, найденный таким образом как маршрут движения.
[0033] Картографическая база 40 данных хранит картографическую информацию. Картографическая информация включает в себя дорожную информацию и информацию о правилах дорожного движения. Дорожная информация и информация о правилах дорожного движения определяются узлами и соединениями (также называемыми дорожными соединениями), соединяющими узлы. Соединения идентифицируются на уровне полосы движения.
[0034] Дорожная информация относится к дорогам, по которым могут передвигаться транспортные средства. Каждое дорожное соединение связано с информацией, относящейся к дорогам, такой как, например, тип дороги, ширина дороги, форма дороги, правильность прямого движения, приоритетное отношение движения, правильность обгона (выезд на соседнюю полосу движения или нет) и правильность смены полосы движения, хотя она этим не ограничена. Кроме того, информация о месте установки светофоров, местоположении перекрестков, направлении въезда на перекрестки, типе перекрестков и других перекрестках, например, связана с каждым дорожным соединением.
[0035] Информация о правилах дорожного движения относится к правилам дорожного движения, которые транспортное средство должно соблюдать во время движения. Правила дорожного движения могут включать в себя, например, паузу на маршруте, запрет парковки/остановки, медленное движение, ограничение скорости, запрет смены полосы движения. Информация о правилах дорожного движения в разделе, определяемом дорожным соединением, связана с каждым дорожным соединением. Например, информация о запрете смены полосы движения связана со ссылкой на дорогу в разделе о запрете смены полосы движения. Информация о правилах дорожного движения может быть связана не только с дорогой, но и с определенным местом (широтой, маршрутом) в узле или, например, на карте.
[0036] Информация о правилах дорожного движения может включать в себя не только информацию о правилах дорожного движения, но также информацию о светофорах. Например, информация о цвете, отображаемом в данный момент сигналом светофора, и/или информация о цикле отображения светофора может быть связана с дорожным соединением перекрестка, на котором установлен светофор. Информация о сигнале светофора получается от VICS, например, коммуникатором 32, или от устройства передачи информации (например, оптического маяка), установленного на проезжей части. Информация на дисплее светофора меняется с течением времени. Таким образом, информация о правилах дорожного движения обновляется каждый заранее определенный цикл.
[0037] Картографическая информация, хранящаяся в картографической базе 40 данных, может быть картографической информацией высокой точности, подходящей для автоматического вождения. Картографическая информация высокой точности получается, например, посредством связи с сервером или системой, установленной вне транспортного средства. Кроме того, высокоточная картографическая информация, информация, полученная в режиме реального времени с использованием группы 10 датчиков среды окружения (например, информация об объекте, обнаруженном радаром 11, изображение окружения транспортного средства, захваченное устройством 12 формирования изображения) на этой основе, могут быть сгенерированы в любое время.
[0038] Здесь будет описано автономное вождение в настоящем варианте осуществления. В настоящем варианте осуществления автономное вождение означает режим вождения, отличный от режима вождения, в котором только водитель управляет движением. Например, автономное вождение может включать в себя случай, когда контроллер (не показан) оказывает поддержку водителю для управления движением, или контроллер (не показан) управляет движением по поручению водителя.
[0039] В настоящем варианте осуществления система 200 транспортного средства включает в себя картографическую базу 40 данных, но картографическая база 40 данных может быть предоставлена вне системы 200 транспортного средства. Например, картографическая информация может быть ранее сохранена в портативном запоминающем устройстве (например, на внешнем жестком диске, флэш-памяти). В этом случае запоминающее устройство функционирует как картографическая база 40 данных, электрически соединяя контроллер 100 транспортного средства и запоминающее устройство, хранящее картографическую информацию.
[0040] HMI 50 представляет собой интерфейс для вывода и ввода данных между находящимся в транспортном средстве человеком и системой 200 транспортного средства (человеко-машинный интерфейс, HMI). Примеры HMI 50 могут включать в себя дисплей для отображения текста или видеоинформации и динамик для вывода звука, такого как музыка или звук.
[0041] Будет описана передача и прием данных через HMI 50. Например, когда находящийся в транспортном средстве человек вводит пункт назначения в HMI 50, пункт назначения выводится из HMI50 в навигационную систему 30. Это позволяет навигационной системе 30 получать информацию о пункте назначения транспортного средства. Кроме того, например, когда навигационная система 30 формирует маршрут движения к месту назначения, навигационная система 30 выводит данные маршрута движения в HMI 50. Затем HMI 50 выводит информацию о маршруте движения с помощью дисплея и/или динамика. Таким образом, информация о маршруте движения к месту назначения предоставляется находящемуся в рассматриваемом транспортном средстве человеку. Информация о маршруте движения к пункту назначения может включать в себя, например, руководство по маршруту и необходимое время до пункта назначения.
[0042] Кроме того, например, когда находящийся в транспортном средстве человек вводит команду выполнения смены полосы движения на HMI 50, команда выводится с HMI 50 в контроллер 100 транспортного средства. Это позволяет контроллеру 100 транспортного средства начать процесс управления сменой полосы движения. Кроме того, например, когда контроллер 100 транспортного средства устанавливает целевую траекторию для смены полосы движения, информация о целевой траектории выводится из контроллера 100 транспортного средства в HMI 50. Затем HMI 50 выводит информацию о целевой траектории с помощью дисплея и/или динамика. Это представляет информацию о целевой траектории для смены полосы движения находящемуся в рассматриваемом транспортном средстве человеку. Информация о целевой траектории для смены полосы движения может включать в себя, например, местоположение въезда, указанное на соседней полосе движения, и целевую траекторию во время смены полосы движения. Целевая траектория и местоположение въезда будут описаны позже.
[0043] Контроллер 60 исполнительных механизмов управляет перемещением рассматриваемого транспортного средства. Контроллер 60 исполнительных механизмов включает в себя механизм управления рулевым управлением, механизм управления акселератором, механизм управления тормозом, механизм управления двигателем и т.п. Контроллер 60 исполнительных механизмов получает входной управляющий сигнал от контроллера 100 транспортного средства, который будет описан ниже. Контроллер 60 исполнительных механизмов обеспечивает автономное вождение рассматриваемого транспортного средства путем управления группой 70 исполнительных механизмов управления транспортным средством в ответ на управляющий сигнал от контроллера 100 транспортного средства. Например, контроллер 60 исполнительных механизмов вычисляет угол поворота рулевого колеса, необходимый для движения транспортного средства, и величину нажатия педали акселератора или величину нажатия педали тормоза в соответствии со скоростью движения в ответ на управляющий сигнал для перемещения рассматриваемого транспортного средства из рассматриваемой полосы движения на соседнюю полосу движения. Контроллер 60 исполнительных механизмов выводит вычисленные различные параметры в группу 70 исполнительных механизмов управления транспортным средством.
[0044] Управление каждым механизмом может выполняться полностью автоматически или может выполняться таким образом, чтобы помогать управлению движением водителя. Управление каждым механизмом может быть прервано или остановлено вмешательством водителя. Способ управления движением с помощью контроллера 60 исполнительных механизмов не ограничивается вышеописанным способом управления, и могут использоваться другие хорошо известные способы.
[0045] Группа 70 исполнительных механизмов управления транспортным средством представляет собой различные исполнительные механизмы для приведения в движение рассматриваемого транспортного средства. Как показано на фиг. 1, группа 70 исполнительных механизмов управления транспортным средством может включать в себя исполнительный механизм 71 рулевого управления, исполнительный механизм 72 акселератора и исполнительный механизм 73 управления тормозом.
[0046] Исполнительный механизм 71 рулевого управления управляет направлением рулевого управления и величиной рулевого управления рассматриваемого транспортного средства в ответ на входной сигнал от контроллера 60 исполнительных механизмов. Исполнительный механизм 72 акселератора регулирует степень ускорения рассматриваемого транспортного средства в ответ на входной сигнал от контроллера 60 исполнительных механизмов. Исполнительный механизм 73 управления тормозом управляет работой тормозного устройства рассматриваемого транспортного средства в ответ на входной сигнал от контроллера 60 исполнительных механизмов.
[0047] Указатель 80 поворота имеет внутри мигающую лампу, когда водитель транспортного средства приводит в действие переключатель указания поворота (не показан), он горит оранжевым светом. Указатель 80 поворота представляет собой устройство для указания поворота рассматриваемого транспортного средства окружающим объектам, когда рассматриваемое транспортное средство поворачивает направо и налево или меняет полосу движения. Например, указатель поворота 80 встроен в левую и правую части передней и задней части транспортного средства. Например, указатель 80 поворота состоит из указателя левого поворота и указателя правого поворота.
[0048] Кроме того, в настоящем варианте осуществления управляющий сигнал вводится от контроллера 100 транспортного средства в указатель 80 поворота. Управляющий сигнал может включать в себя, например, сигнал для мигания указателя 80 поворота, который выключен (также называемый сигналом мигания), и сигнал для выключения мигания указателя поворота 80 (также называемый сигналом выключения). Например, когда на указатель 80 поворота подается сигнал мигания, чтобы указатель левого поворота мигал, указатель 80 поворота включает указатель левого поворота. Когда сигнал на выключение указателя левого поворота подается на указатель 80 поворота, указатель 80 поворота выключает указатель левого поворота. Таким образом, указателем поворота 80, помимо водителя транспортного средства, управляет контроллер 100 транспортного средства.
[0049] Далее будет описан контроллер 100 транспортного средства. Контроллер 100 транспортного средства согласно одному или нескольким вариантам осуществления настоящего изобретения сконфигурирован компьютером, на котором установлены аппаратные средства и программное обеспечение. В частности, сервер 1 сконфигурирован так, что он включает в себя постоянное запоминающее устройство (ПЗУ), в котором хранятся программы, центральный процессор (ЦП), который выполняет программы, хранящиеся в ПЗУ, и оперативное запоминающее устройство (ОЗУ), которое служит запоминающим устройством с произвольным доступом. В качестве рабочих схем могут использоваться MPU (микропроцессор), DSP (цифровой сигнальный процессор), ASIC (специализированная интегральная схема) и FPGA (программируемая пользователем вентильная матрица) вместо или в дополнение к ЦП. Контроллер 101, показанный на фиг. 1 соответствует ЦП. Хранилище 110, показанное на фиг. 1 соответствует ПЗУ и ОЗУ.
[0050] В настоящем варианте осуществления программа, которая должна выполняться контроллером 101, заранее сохраняется в запоминающем устройстве 110, но программа может храниться в другом устройстве. Например, программа может храниться на машиночитаемом и портативном машиночитаемом носителе записи (например, дисковом носителе, флэш-памяти и т.д.). В этом случае контроллер 101 выполняет программу, загруженную с машиночитаемого носителя записи. Другими словами, контроллер 100 транспортного средства может быть сконфигурирован так, чтобы включать в себя только рабочую схему и загружать программу извне.
[0051] Как показано на фиг. 1, контроллер 101 включает в себя блок 102 получения информации, блок 103 распознавания ситуации, блок 104 задания, блок 105 определения состояния движения, блок 106 определения наличия пространства, блок 107 предсказания и блок 108 управления движением. Эти блоки включают функции, описанные позже, с помощью программного обеспечения, установленного в ПЗУ. В настоящем варианте осуществления функции контроллера 101 разделены на семь функциональных блоков, и описаны функции соответствующих функциональных блоков. Однако функции контроллера 101 не обязательно должны быть разделены на семь блоков и могут быть разделены на шесть или менее функциональных блоков или восемь или более функциональных блоков. Функция контроллера 101 не ограничивается функцией функционального блока, описанного ниже, а может включать в себя, например, функцию управления навигационной системой.
[0052] Будет описана функция блока 102 получения информации. Блок 102 получения информации получает различную информацию от группы 10 датчиков среды окружения, группы 20 датчиков транспортного средства, навигационной системы 30, картографической базы 40 данных и каждого из HMI 50.
[0053] Блок 102 получения информации получает информацию об окружении (также называемую внешней информацией рассматриваемого транспортного средства) рассматриваемого транспортного средства, которая обнаруживается группой 10 датчиков среды окружения. Информация об окружении рассматриваемого транспортного средства включает в себя результат обнаружения, обнаруженный радаром 11, и изображение, захваченное устройством 12 формирования изображения. Кроме того, блок 102 получения информации получает информацию (также называемую внутренней информацией рассматриваемого транспортного средства) о состоянии рассматриваемого транспортного средства, которая обнаруживается группой 20 датчиков транспортного средства. Внутренняя информация рассматриваемого транспортного средства включает в себя скорость транспортного средства, ускорение, угловую скорость, величину нажатия педали акселератора и величину нажатия педали тормоза. Кроме того, блок 102 получения информации получает текущее местоположение рассматриваемого транспортного средства, маршрут движения рассматриваемого транспортного средства и информацию о дорожном движении от навигационной системы 30. Блок 102 получения информации получает картографическую информацию (включая дорожную информацию и информацию о правилах дорожного движения) из картографической базы 40 данных. Блок 102 получения информации получает команду смены полосы движения от HMI 50. Различные типы информации, полученные блоком 102 получения информации, используются в соответствующих функциях, описанных ниже.
[0054] Будет описана функция блока 103 распознавания ситуации. Блок 103 распознавания ситуации распознает ситуацию вокруг рассматриваемого транспортного средства на основе различной информации, полученной блоком 102 получения информации, и идентифицирует место смены полосы движения рассматриваемого транспортного средства.
[0055] Блок 103 распознавания ситуации распознает ситуацию вокруг рассматриваемого транспортного средства. Например, блок 103 распознавания ситуации распознает наличие или отсутствие препятствия в окрестностях рассматриваемого транспортного средства, направление к препятствию, расстояние до препятствия и относительную скорость препятствия относительно рассматриваемого транспортного средства из результата обнаружения, обнаруженного радаром 11, и захваченного изображения, захваченного устройством 12 формирования изображения. Это позволяет блоку 103 распознавания ситуации определять количество препятствий, взаимное расположение каждого препятствия и рассматриваемого транспортного средства и скорость движения препятствия.
[0056] Кроме того, например, блок 103 распознавания ситуации распознает расстояние между рассматриваемым транспортным средством и линией границы полос движения из результата обнаружения, обнаруженного радаром 11, и из захваченного изображения, захваченного устройством 12 формирования изображения. Это позволяет блоку 103 распознавания ситуации определять, в каком местоположении рассматриваемое транспортное средство движется по рассматриваемой полосе движения в направлении ширины полосы движения. В дальнейшем местоположение транспортного средства в пределах полосы движения также называется горизонтальным положением транспортного средства относительно полосы движения. Блок 103 распознавания ситуации, например, устанавливает конкретное положение на центральной линии транспортного средства как горизонтальное положение транспортного средства по отношению к полосе движения, хотя это особо не ограничивается.
[0057] Кроме того, например, блок 103 распознавания ситуации указывает количество полос движения дороги, по которым движется рассматриваемое транспортное средство, в соответствии с результатом обнаружения радаром 11, захваченным изображением, захваченным устройством 12 формирования изображения, и картографической информацией в картографической базе 40 данных. При указании множества полос движения в том же направлении, что и направление движения рассматриваемого транспортного средства, блок 103 распознавания ситуации указывает полосу, по которой рассматриваемое транспортное средство движется среди множества полос.
[0058] Блок 103 распознавания ситуации задает место смены полосы движения в соответствии с окружающей ситуацией рассматриваемого транспортного средства и маршрутом движения рассматриваемого транспортного средства после распознавания окружающей ситуации рассматриваемого транспортного средства. Блок 103 распознавания ситуации получает текущее местоположение рассматриваемого транспортного средства и маршрут движения рассматриваемого транспортного средства от навигационной системы 30 и задает место смены полосы движения в соответствии с текущим местоположением рассматриваемого транспортного средства и маршрутом движения. Место смены полосы движения указывает место, в котором транспортное средство необходимо переместить с рассматриваемой полосы движения на соседнюю полосу движения при движении по маршруту движения. Блок 103 распознавания ситуации задает место, в котором следует изменить полосу движения в маршруте движения, ссылаясь на маршрут движения рассматриваемого транспортного средства.
[0059] Блок 103 распознавания ситуации задает целевое место на маршруте движения, такое как перекресток, который является местом для изменения направления движения, или развязкой, которая является местом для изменения курса в направлении, отличном от направления движения транспортного средства. Затем блок 103 распознавания ситуации для изменения направления движения рассматриваемого транспортного средства в целевом месте задает место смены полосы движения, в котором необходимо переместить транспортное средство на соседнюю полосу движения с рассматриваемой полосы движения.
[0060] Например, транспортному средству, которое движется по крайней левой полосе движения из множества полос движения, необходимо перейти на правую полосу движения для поворота направо на перекрестке перед текущим местоположением в соответствии с маршрутом движения. В такой сцене блок 103 распознавания ситуации задает перекресток, для которого требуется поворот направо, в качестве целевого места. Блок 103 распознавания ситуации задает место, которое находится на предварительно определенном коротком расстоянии от перекрестка (целевого места), в котором нужно повернуть направо, в качестве места смены полосы движения на маршруте движения. Например, участок смены полосы движения устанавливается на расстоянии нескольких сотен метров от целевого места на маршруте движения. Место смены полосы движения не обязательно должно быть установлено в точке, это может быть выполнено на заранее определенном участке. В качестве другого примера место смены полосы движения может включать в себя заранее определенный участок перед местом разветвления, предусмотренным на скоростной автомагистрали, предварительно определенный участок перед местом слияния, предусмотренный на скоростной автомагистрали, и предварительно определенный участок перед конечным пунктом дорожного транспортного средства. Место разветвления, предусмотренное на скоростной автомагистрали, может включать в себя места разветвления в каждом направлении и места разветвления между основной линией и съездом. В настоящем варианте осуществления длина участка места смены полосы движения особо не ограничивается.
[0061] В настоящем варианте осуществления рассматриваемое транспортное средство автоматически меняет полосу движения, как описано ниже, когда место смены полосы движения задано блоком 103 распознавания ситуации и рассматриваемое транспортное средство достигает этого места, или когда находящийся в транспортном средстве человек вводит команду выполнения смены полосы движения.
[0062] Будет описана функция блока 104 задания. Блок 104 задания задает местоположение въезда, которое указывает местоположение пункта назначения въезда рассматриваемого транспортного средства, и находится на полосе движения, смежной с рассматриваемой полосой движения, в соответствии с информацией об окружении рассматриваемого транспортного средства. Например, блок 104 задания задает местоположение въезда, которое имеет заранее определенную длину (расстояние) или больше в направлении движения транспортного средства по соседней полосе движения на основе результата обнаружения радаром 11 и захваченного изображения, захваченного с помощью устройства 12 формирования изображения. Предварительно определенное расстояние является предварительно установленным расстоянием и является определенным экспериментально расстоянием. В настоящем варианте осуществления предварительно определенное расстояние установлено так, чтобы можно было задать местоположение въезда по отношению к соседней полосе движения в дорожном заторе.
[0063] Кроме того, блок 104 задания задает, среди других транспортных средств, расположенных впереди и позади местоположения въезда, переднее как переднее транспортное средство, и заднее как заднее транспортное средство при задании местоположения въезда. Таким образом, блок 104 задания задает переднее транспортное средство, другое транспортное средство, расположенное перед местоположением въезда, и заднее транспортное средство, являющееся другим транспортным средством, расположенным за местоположением въезда. Например, блок 104 задания задает переднее транспортное средство, которое находится ближе всего к местоположению въезда среди множества других транспортных средств, расположенных впереди местоположения въезда на соседней полосе движения. Кроме того, блок 104 задания задает заднее транспортное средство, которое находится ближе всего к местоположению въезда среди множества других транспортных средств, расположенных позади местоположения въезда на соседней полосе движения. Блок 104 задания может задать другое транспортное средство в заранее определенной области перед местоположением въезда в качестве переднего транспортного средства. Например, блок 104 задания задает заранее определенную область, длина которой соответствует скорости рассматриваемого транспортного средства в направлении вдоль направления движения рассматриваемого транспортного средства. Заранее определенная область может храниться в запоминающем устройстве, таком как ПЗУ, хотя этим не ограничено.
[0064] Блок 104 задания задает целевое транспортное средство, расположенное впереди переднего транспортного средства на соседней полосе движения, после задания переднего транспортного средства и заднего транспортного средства. Например, блок 104 задания задает целевое транспортное средство, расположенное ближе всего к переднему транспортному средству среди других транспортных средств впереди переднего транспортного средства на соседней полосе движения в соответствии с результатом обнаружения радаром 11 и изображением, захваченным устройством 12 формирования изображения.
[0065] В настоящем варианте осуществления целевое транспортное средство используется для предсказания поведения переднего транспортного средства. Поведение переднего транспортного средства означает, что остановившееся переднее транспортное средство начинает движение. Целевое транспортное средство используется для предсказания начала движения переднего транспортного средства.
[0066] Блок 104 задания, когда любое из переднего транспортного средства, заднего транспортного средства и целевого транспортного средства не может быть задано, использует только информацию идентифицированного транспортного средства для обработки смены полосы движения. Например, когда нет транспортного средства перед передним транспортным средством, хотя были заданы переднее транспортное средство и заднее транспортное средство, блок 104 идентификации использует только информацию о переднем транспортном средстве и заднем транспортном средстве для обработки смены полосы движения.
[0067] Далее будет описана функция блока 105 определения состояния движения. Блок 105 определения состояния движения определяет состояние движения каждого транспортного средства, заданное блоком 104 задания, в соответствии с информацией об окружении рассматриваемого транспортного средства. Например, когда блок 104 задания задает переднее транспортное средство, заднее транспортное средство и целевое транспортное средство, блок 105 определения состояния движения определяет состояние движения переднего транспортного средства, заднего транспортного средства и целевого транспортного средства на основе результата обнаружения посредством радара 11 и захваченного изображения, захваченного устройством 12 формирования изображения. Когда переднее транспортное средство описывается в качестве примера, блок 105 определения состояния движения определяет состояние движения переднего транспортного средства как остановленное, когда скорость переднего транспортного средства равна нулю, км/ч, расстояние, пройденное передним транспортным средством за единицу времени равно нулю км, стоп-сигнал переднего транспортного средства горит или светофор, регулирующий движение по соседней полосе движения, светится красным светом. Блок 105 определения состояния движения аналогично определяет состояние движения для заднего транспортного средства и целевого транспортного средства.
[0068] Далее будет описана функция блока 106 определения наличия пространства. Блок 106 определения наличия пространства определяет, имеет ли местоположение въезда, заданное блоком 104 задания в соответствии с информацией об окружении рассматриваемого транспортного средства, пространство, в которое въезжает рассматриваемое транспортное средство (в дальнейшем также называемое пространством въезда). Пространство въезда является пространством между передним транспортным средством и задним транспортным средством, а длина пространства вдоль направления движения транспортного средства составляет предварительно определенное расстояние или больше.
[0069] Блок 106 определения наличия пространства определяет, есть ли какое-либо пространство въезда в местоположении въезда в соответствии с расстоянием между транспортными средствами переднего транспортного средства и заднего транспортного средства. Например, блок 106 определения наличия пространства, когда расстояние между транспортными средствами переднего транспортного средства и заднего транспортного средства равно или превышает предварительно определенное расстояние, определяет, что пространство въезда присутствует. С другой стороны, блок 106 определения наличия пространства, когда расстояние между транспортными средствами переднего транспортного средства и заднего транспортного средства меньше предварительно определенного расстояния, определяет отсутствие пространства въезда в местоположении въезда. Предварительно определенное расстояние конфигурируется заранее, чтобы предотвратить любое беспокойство водителя переднего транспортного средства и заднего транспортного средства, когда рассматриваемое транспортное средство въезжает в пространство въезда. Предварительно определенное расстояние может включать в себя значение, полученное путем добавления запаса к расстоянию (длине транспортного средства в направлении движения) между передней концевой частью и задней концевой частью транспортного средства в направлении вдоль направления движения рассматриваемого транспортного средства.
[0070] Далее будет описана функция блока 107 предсказания. Блок 107 предсказания предсказывает, начинает ли движение переднее транспортное средство, когда в местоположении движения блоком 106 определения наличия пространства не определено пространство въезда. Блок 107 предсказания предсказывает, начинает ли движение переднее транспортное средство, как описано ниже, когда блок 105 определения состояния движения определяет, что переднее транспортное средство и заднее транспортное средство остановлены.
[0071] Например, блок 107 предсказания предсказывает, начинает ли движение переднее транспортное средство, в зависимости от того, выключен ли стоп-сигнал переднего транспортного средства. Блок 107 предсказания определяет, выключен ли стоп-сигнал переднего транспортного средства, на основе захваченного изображения, захваченного устройством 12 формирования изображения. Когда стоп-сигнал выключен, блок 107 предсказания предсказывает, что переднее транспортное средство собирается начать движение. С другой стороны, когда выключение стоп-сигнала не обнаружено, блок 107 предсказания предсказывает, что переднее транспортное средство продолжает стоять без начала движения. Блок 107 предсказания предсказывает начало движения переднего транспортного средства в соответствии с работой водителя переднего транспортного средства.
[0072] Кроме того, блок 107 предсказания предсказывает, начинает ли движение переднее транспортное средство, когда целевое транспортное средство задано блоком 104 задания в дополнение к переднему транспортному средству и заднему транспортному средству, в соответствии с поведением целевого транспортного средства. Например, блок 107 предсказания определяет, равно ли пройденное расстояние целевого транспортного средства в единицу времени предварительно определенному расстоянию или превышает его, а затем предсказывает, начинает ли движение переднее транспортное средство, в ответ на результат определения.
[0073] Блок 107 предсказания измеряет пройденное расстояние целевого транспортного средства за единицу времени в соответствии с результатом обнаружения, обнаруженным радаром 11. Когда измеренное расстояние проезда целевого транспортного средства составляет предварительно определенное расстояние или больше, блок 107 предсказания предсказывает, что переднее транспортное средство собирается начать движение. С другой стороны, когда измеренное расстояние проезда целевого транспортного средства меньше предварительно определенного расстояния, блок 107 предсказания предсказывает, что переднее транспортное средство продолжает стоять без начала движения. Блок 107 предсказания предсказывает начало движения переднего транспортного средства в соответствии с расстоянием между передним транспортным средством и целевым транспортным средством, необходимым для начала движения переднего транспортного средства. Единица времени определяется экспериментально. Блок 107 предсказания может соответствующим образом изменять единицу времени.
[0074] Кроме того, блок 107 предсказания предсказывает, начинает ли движение переднее транспортное средство, в зависимости от того, обнаружено ли выключение стоп-сигнала целевого транспортного средства. Блок 107 предсказания определяет, выключен ли стоп-сигнал целевого транспортного средства, в соответствии с изображением, захваченным устройством 12 формирования изображения. Когда стоп-сигнал выключен, блок 107 предсказания предсказывает, что переднее транспортное средство собирается начать движение. С другой стороны, когда выключение стоп-сигнала не обнаружено, блок 107 предсказания предсказывает, что переднее транспортное средство продолжает стоять без начала движения. Блок 107 предсказания предсказывает начало движения переднего транспортного средства в соответствии с порядком начала движения транспортного средства, в котором переднее транспортное средство начинает движение после начала движения целевого транспортного средства.
[0075] Блок 107 предсказания также может предсказывать, начинает ли движение переднее транспортное средство в ответ на изменения в ситуации на соседней полосе движения в дополнение к поведению переднего транспортного средства или целевого транспортного средства.
[0076] Например, блок 107 предсказания предсказывает, начинает ли движение переднее транспортное средство, в соответствии с отображением сигнала светофора, который предоставлен перед передним транспортным средством, и организует движение на соседней полосе движения. Блок 107 предсказания, например, обнаруживает, переключено ли отображение сигнала целевого сигнала с красного на синий в соответствии с информацией от VICS. Когда отображение сигнала переключается, блок 107 предсказания предсказывает, что переднее транспортное средство собирается начать движение. С другой стороны, когда переключение отображения сигнала не обнаружено, блок 107 предсказания предсказывает, что переднее транспортное средство продолжает стоять без начала движения. Блок 107 предсказания предсказывает начало движения переднего транспортного средства в соответствии с отображением сигнала, необходимого для начала движения переднего транспортного средства.
[0077] Кроме того, например, когда существует причина дорожного затора перед передним транспортным средством на соседней полосе движения, блок 107 предсказания определяет, проехало ли целевое транспортное средство или другое транспортное средство впереди целевого транспортного средства через место, в случае возникновения дорожного затора в соответствии с результатом, обнаруженным радаром 11. Когда блок 107 предсказания обнаруживает, что целевое транспортное средство или другое транспортное средство впереди целевого транспортного средства прошло через место из-за дорожного затора, блок 107 предсказания предсказывает, что переднее транспортное средство собирается начать движение. С другой стороны, когда блок 107 предсказания не обнаруживает прохождение какого-либо транспортного средства через место, блок 107 предсказания предсказывает, что переднее транспортное средство продолжает стоять не начиная движения. Примеры причин дорожного затора могут включать в себя строительство дорог, аварии и регулирование полосы движения. Блок 107 предсказания позволяет заранее указать причину дорожного затора на соседней полосе движения и причину в соответствии с информацией о дорожном движении.
[0078] Например, когда пешеходный переход находится перед движущимся впереди транспортным средством, блок 107 предсказания определяет, пересекает ли пешеходный переход пешеход или велосипед, в соответствии с захваченным изображением, захваченным устройством 12 формирования изображения. Когда блок 107 предсказания обнаруживает пешехода или т.п., пересекающего пешеходный переход, блок 107 предсказания может предсказать, что переднее транспортное средство собирается начать движение. С другой стороны, когда блок 107 предсказания не обнаруживает пешехода или т.п., пересекающего пешеходный переход, блок 107 предсказания предсказывает, что переднее транспортное средство продолжает стоять, не начиная движения.
[0079] Блок 107 предсказания может предсказывать, что переднее транспортное средство не начинает движение, используя следующий способ. Блок 107 предсказания определяет, соответствует ли текущая ситуация ситуации, в которой начало движения переднего транспортного средства непредсказуемо. Блок 107 предсказания предсказывает, что переднее транспортное средство не начинает движение, когда начало движения переднего транспортного средства непредсказуемо. Ситуации, в которых начало движения переднего транспортного средства непредсказуемо, могут включать, например, случай, когда форма дороги соседней полосы движения изогнута, и случай, когда переднее транспортное средство классифицируется как большое транспортное средство. Например, когда форма дороги соседней полосы определяется как изогнута на основе картографической информации или когда переднее транспортное средство обнаруживается как большое транспортное средство на основе захваченного изображения, захваченного устройством 12 формирования изображения, блок 107 предсказания предсказывает, что переднее транспортное средство не начинает движения, потому что прогнозирование начала движения переднего транспортного средства непредсказуемо.
[0080] Далее будут описаны функции блока 108 управления движением. Блок 108 управления движением управляет движением рассматриваемого транспортного средства в процессе управления сменой полосы движения.
[0081] Блок 108 управления движением устанавливает местоположение ожидания рассматриваемого транспортного средства на рассматриваемой полосе движения для предсказания того, начинает ли движение переднее транспортное средство. Местоположение ожидания является местоположением для ожидания рассматриваемого транспортного средства перед сменой полосы движения рассматриваемого транспортного средства и местоположением, в котором блок 107 предсказания выполняет обработку предсказания. Например, блок 108 управления движением устанавливает местоположение ожидания со стороны соседней полосы движения относительно центральной линии рассматриваемой полосы движения вдоль направления движения рассматриваемого транспортного средства. Кроме того, например, блок 108 управления движением устанавливает местоположение ожидания на рассматриваемой полосе движения, которое находится сзади по отношению к переднему транспортному средству, и может позволить рассматриваемому транспортному средству плавно перемещаться в местоположение въезда. Кроме того, например, блок 108 управления движением устанавливает местоположение ожидания, так что передняя оконечная часть транспортного средства находится сзади задней оконечной части переднего транспортного средства, а передняя оконечная часть транспортного средства находится впереди передней оконечной части заднего транспортного средства. Следует отметить, что местоположение ожидания не является местоположением, удовлетворяющим всем вышеупомянутым условиям, и может быть местоположением, удовлетворяющим по меньшей мере одному из вышеупомянутых условий.
[0082] Когда задано местоположение ожидания рассматриваемого транспортного средства, блок 108 управления движением перемещает рассматриваемое транспортное средство в местоположение ожидания. Например, блок 108 управления движением устанавливает скорость транспортного средства и угол поворота рулевого колеса в местоположение ожидания, скорость транспортного средства в местоположении ожидания, угол, под которым передний конец рассматриваемого транспортного средства обращен в местоположение ожидания, и т.п. и выводит управляющий сигнал, включающий в себя установленное содержимое, в контроллер 60 исполнительных механизмов.
[0083] Когда другое транспортное средство, расположенное в соседней полосе движения, включая переднее транспортное средство и заднее транспортное средство, остановлено, блок 108 управления движением устанавливает скорость транспортного средства в местоположении ожидания равной нулю км/ч. Это позволяет блоку 107 предсказания предсказать, начинает ли движение переднее транспортное средство в состоянии, когда рассматриваемое транспортное средство остановлено в местоположении ожидания.
[0084] Кроме того, блок 108 управления движением генерирует управляющий сигнал для включения указателя 80 поворота, предусмотренного со стороны соседней полосы движения, когда начало движения переднего транспортного средства предсказывается блоком 107 предсказания и когда заднее транспортное средство определено как стоящее блоком 105 определения состояния движения в момент предсказания начала движения переднего транспортного средства. Кроме того, блок 108 управления движением генерирует целевую траекторию для транспортного средства, чтобы сменить полосу движения, используя текущее местоположение транспортного средства в качестве начального места и местоположение въезда в качестве конечного места. Блок 108 управления движением устанавливает скорость рассматриваемого транспортного средства и угол поворота рулевого колеса, когда транспортное средство движется по целевой траектории. Блок 108 управления движением выдает различные управляющие сигналы в контроллер 60 исполнительных механизмов и указатель 80 поворота. Когда местоположение рассматриваемого транспортного средства достигает местоположения въезда, блок 108 управления движением прекращает мигание указателя 80 поворота и прекращает управление сменой полосы движения.
[0085] Кроме того, блок 108 управления движением управляет рассматриваемым транспортным средством так, чтобы ждать в предварительно определенном местоположении перед достижением местоположения въезда, когда блок 106 определения наличия пространства обнаруживает отсутствие пространства въезда в местоположение въезда. Например, блок 108 управления движением формирует воображаемую граничную линию, соединяя ближайшее местоположение переднего конца заднего транспортного средства к рассматриваемой полосе движения и ближайшее местоположение заднего конца переднего транспортного средства к рассматриваемой полосе движения на целевой траектории. Блок 108 управления движением задает местоположение, в котором рассматриваемое транспортное средство не выходит за воображаемую граничную линию на целевой траектории. Блок 108 управления движением управляет рассматриваемым транспортным средством, чтобы ожидать пока рассматриваемое транспортное средство находится в заданном местоположении. Это позволяет водителю заднего транспортного средства быть проинформированным о том, что рассматриваемое транспортное средство ожидает перед задним транспортным средством для смены полосы движения на соседнюю полосу движения.
[0086] Кроме того, блок 108 управления движением, когда задано целевое транспортное средство, устанавливает расстояние перемещения рассматриваемого транспортного средства вдоль целевой траектории в соответствии с расстоянием перемещения целевого транспортного средства. Например, блок 108 управления движением определяет пройденное расстояние целевого транспортного средства в единицу времени в соответствии с результатом обнаружения, обнаруженным радаром 11. Блок 108 управления движением устанавливает большее расстояние перемещения рассматриваемого транспортного средства, поскольку расстояние движения целевого транспортного средства в единицу времени больше. Блок 108 управления движением, обращаясь к результату обнаружения группой 20 датчиков транспортного средства, управляет рассматриваемым транспортным средством для перемещения на установленное расстояние перемещения.
[0087] Кроме того, блок 108 управления движением устанавливает скорость рассматриваемого транспортного средства и угол поворота рулевого колеса для движения по целевой траектории, когда блок 106 определения наличия пространства обнаруживает пространство въезда в местоположении въезда. Блок 108 управления движением выдает различные управляющие сигналы на контроллер 60 исполнительных механизмов. Это позволяет рассматриваемому транспортному средству менять полосу движения с рассматриваемой полосы движения на соседнюю полосу движения вдоль целевой траектории и, таким образом, въезжать в пространство между передним транспортным средством и задним транспортным средством. Рассматриваемому транспортному средству разрешается перемещаться в местоположение въезда в любое время, когда процесс может быть выполнен. Блок 108 управления движением позволяет рассматриваемому транспортному средству перемещаться в местоположение въезда, когда пространство въезда обнаруживается в местоположении въезда.
[0088] Далее будет описана последовательность операций управления контроллером 101 согласно настоящему варианту осуществления со ссылкой на фиг. 2А и фиг. 2В. Фиг. 2А и фиг. 2B - это блок-схемы последовательности операций, иллюстрирующие процессы управления, выполняемые контроллером 101. Кроме того, со ссылкой на фиг. 3 и 4 будет описан пример движения рассматриваемого транспортного средства, выполняемого контроллером 101. Управление каждого из них может выполняться полностью автоматически или может выполняться таким образом, чтобы помогать водителю при вождении.
[0089] На этапе S1 контроллер 101 получает информацию об окружении рассматриваемого транспортного средства. Например, контроллер 101 получает информацию от группы 10 датчиков среды окружения о направлении на другое транспортное средство и расстоянии до другого транспортного средства, относительной скорости другого транспортного средства по отношению к рассматриваемому транспортному средству, типу транспортного средства другого транспортного средства, размеру другого транспортного средства и форме другого транспортного средства в качестве информации об окружении рассматриваемого транспортного средства. Кроме того, например, контроллер 101 получает информацию о дорожном заторе на дороге, включая рассматриваемую полосу движения, в качестве информации об окружении рассматриваемого транспортного средства от коммуникатора 32. Контроллер 101 получает внешнюю информацию и внутреннюю информацию рассматриваемого транспортного средства в заранее определенном цикле при выполнении обработки управления после этапа S2. Состояние движения выражается, например, местоположением транспортного средства и скоростью транспортного средства.
[0090] На этапе S2 контроллер 101 распознает ситуацию вокруг рассматриваемого транспортного средства в соответствии с информацией об окружении рассматриваемого транспортного средства, полученной на этапе S1.
[0091] На этапе S3 контроллер 101 задает участок (место смены полосы движения), на котором рассматриваемое транспортное средство должно сменить полосу движения. Кроме того, контроллер 101 сравнивает текущее местоположение рассматриваемого транспортного средства с местом смены полосы движения и определяет, достигает ли рассматриваемое транспортное средство места смены полосы движения. Когда контроллер 101 определяет, что транспортное средство достигло места смены полосы движения, процесс переходит к этапу S4. С другой стороны, когда определяется, что рассматриваемое транспортное средство не достигло места смены полосы движения, система находится в режиме ожидания на этапе S3.
[0092] На этапе S4 контроллер 101 задает местоположение въезда, которое указывает местоположение для въезда рассматриваемого транспортного средства и располагается на соседней полосе движения в соответствии с информацией об окружении рассматриваемого транспортного средства. Например, блок 104 задания задает местоположение въезда, где расстояние в направлении вдоль направления движения транспортного средства составляет предварительно определенное расстояние или большее на соседней полосе движения.
[0093] На этапе S5 контроллер 101 задает переднее транспортное средство, являющееся другим транспортным средством, которое расположено перед местоположением въезда, и задает заднее транспортное средство, являющееся другим транспортным средством, которое находится позади местоположения въезда в соответствии с информацией об окружении рассматриваемого транспортного средства. Кроме того, контроллер 101 задает целевое транспортное средство, которое является другим транспортным средством, расположенным впереди по отношению к переднему транспортному средству. Между прочим, когда какое-либо из переднего транспортного средства, заднего транспортного средства и целевого транспортного средства не может быть указано, контроллер 101 использует только информацию заданного транспортного средства для обработки смены полосы движения, когда контроллер 101 не может задать на последующих этапах.
[0094] На этапе S6 контроллер 101 определяет состояние движения переднего транспортного средства, заднего транспортного средства и целевого транспортного средства. В частности, контроллер 101 определяет, все ли эти транспортные средства остановлены. Например, контроллер 101 определяет состояние движения каждого транспортного средства по результату обнаружения группой 10 датчиков среды окружения. Когда контроллер 101 определяет, что все транспортные средства остановлены, процесс переходит к этапу S7. С другой стороны, когда контроллер 101 определяет, что по меньшей мере одно из транспортных средств движется, контроллер 101 завершает процесс смены транспортного средства.
[0095] Когда все транспортные средства определены как остановленные на этапе S6, процесс переходит к этапу S7. На последующих этапах S7-S19 контроллер 101 выполняет процесс смены полосы движения, когда переднее транспортное средство, заднее транспортное средство и целевое транспортное средство остановлены.
[0096] Фиг. 3 (A) представляет собой пример сцены, в которой рассматриваемое транспортное средство V меняет полосу движения с полосы L1 движения на полосу L2 движения на дороге с двумя полосами движения на одной стороне (полоса L1 движения, полоса L2 движения). Полоса L2 движения - это полоса движения, примыкающая к полосе L1 движения справа от транспортного средства V. Граница L12 полос движения образуется между полосой L1 движения и полосой L2 движения. Транспортное средство, движущееся по полосе L1 движения, является рассматриваемым транспортным средством V. Остановившиеся на полосе L2 движения транспортные средства являются другими транспортными средствами X1- X4. Сцена на фиг. 3A является примерной сценой после процессов этапов S1-S6 на фиг. 2А. Центральная линия C1 указывает центральную линию полосы L1 движения вдоль направления движения рассматриваемого транспортного средства V, а центральная линия C2 указывает центральную линию полосы L2 движения вдоль направления движения рассматриваемого транспортного средства V.
[0097] В сцену на фиг. 3A, контроллер 101 определяет, что рассматриваемое транспортное средство V достигло места смены полосы движения (не показано) (определяется ДА на этапе S3), и задает местоположение въезда между другим транспортным средством X2 и другим транспортным средством X3 (этап S4). Кроме того, контроллер 101 задает переднее транспортное средство, являющееся транспортным средством X2, расположенным перед местоположением въезда, задает заднее транспортное средство, являющееся транспортным средством X3, расположенным позади местоположения въезда, и задает целевое транспортное средство, являющееся транспортным средством X1, расположенным впереди транспортного средства X2 (этап S5). Контроллер 101 определяет, что транспортные средства X1-X3 остановлены в соответствии с информацией об окружении рассматриваемого транспортного средства (ДА определяется на этапе S6). Между прочим, в скобках указаны соответствующие процессы в блок-схеме последовательности операций, показанной на фиг. 2А.
[0098] Возвращаясь к фиг. 2A будет описана блок-схема процесса смены полосы движения. На этапе S7 контроллер 101 определяет, присутствует ли пространство въезда в местоположении въезда, установленном на этапе S4. Контроллер 101 в соответствии с тем, находится ли расстояние между передним транспортным средством и задним транспортным средством на предварительно определенном расстоянии, определяет, присутствует ли пространство въезда. Например, контроллер 101, когда расстояние между транспортными средствами переднего транспортного средства и заднего транспортного средства равно или превышает предварительно определенное расстояние, определяет, что пространство въезда присутствует в местоположении въезда. С другой стороны, контроллер 101, когда расстояние между транспортным средством переднего транспортного средства и заднего транспортного средства меньше предварительно определенного расстояния, определяет, что в местоположении въезда нет пространства въезда. Когда определено, что пространство въезда присутствует в местоположении въезда, процесс переходит к этапу S16, и контроллер 101 выполняет управление сменой полосы движения, чтобы перейти с рассматриваемой полосы движения на соседнюю полосу движения, и завершает процесс смены транспортного средства. С другой стороны, когда определено, что в местоположении въезда нет пространства, процесс переходит к этапу S8.
[0099] На этапе S7, когда в местоположении въезда не определено пространство, процесс переходит к этапу S8. На этапе S8 контроллер 101 устанавливает местоположение ожидания. Например, контроллер 101 устанавливает местоположение ожидания со стороны соседней полосы движения по отношению к центральной линии рассматриваемой полосы движения вдоль направления движения рассматриваемого транспортного средства. На фиг. 3A, местоположение ожидания установлено на полосе L2 движения относительно центральной линии C1 полосы L1 движения.
[0100] На этапе S9 контроллер 101 выполняет управление ожиданием для ожидания рассматриваемого транспортного средства в местоположении ожидания, установленном на этапе S8. Например, контроллер 101 устанавливает скорость и угол поворота рулевого колеса транспортного средства в местоположение ожидания, скорость транспортного средства в местоположении ожидания (ноль км/ч), угол, под которым передний конец рассматриваемого транспортного средства обращен в местоположение ожидания, и т.п.. Затем контроллер 101 выдает управляющий сигнал, включающий в себя заданное содержимое, в контроллер 60 исполнительных механизмов.
[0101] Фиг. 3B является сценой, в которой истек предварительно определенный период времени от сцены на фиг. 3A, и представляет собой примерную сцену после процессов этапов S7-S9 на фиг. 2А.
[0102] В сцене, показанной на фиг. 3B, контроллер 101 определяет отсутствие пространства в местоположении въезда, поскольку расстояние между транспортным средством X2 и транспортным средством X3 (l1) меньше предварительно определенного расстояния (определено «Нет» на этапе S7). Кроме того, контроллер 101 устанавливает местоположение ожидания рассматриваемого транспортного средства V на рассматриваемой полосе движения (этап S8) и останавливает рассматриваемое транспортное средство V в местоположении ожидания (этап S9). Контроллер 101 предсказывает, начинает ли движение переднее транспортное средство (транспортное средство X2), в то время как транспортное средство V остановлено в местоположении ожидания. В скобках указаны соответствующие процессы в блок-схеме последовательности операций, показанной на фиг. 2А.
[0103] Целевая траектория R, показанная на фиг. 3B представляет траекторию рассматриваемого транспортного средства V, запланированную для движения. Целевая траектория R (пунктирная линия) показана для облегчения визуального понимания того, что между транспортным средством X2 и транспортным средством X3 нет пространства въезда. Таким образом, целевая траектория R не может быть сформирована в сцене, показанной на фиг. 3Б. Пунктирная линия D, соединяющая рассматриваемое транспортное средство V и транспортное средство X1, указывает, что транспортное средство X1 может быть обнаружено радаром 11, установленным на рассматриваемом транспортном средстве V. То есть целевое транспортное средство (транспортное средство X1) остановлено в пределах диапазона обнаружения радара 11.
[0104] Возвращаясь к фиг. 2B будет описана блок-схема последовательности операций процесса смены полосы движения. На этапе S10 контроллер 101 определяет, можно ли предсказать начало движения переднего транспортного средства. Например, контроллер 101 предсказывает, начинает ли движение переднее транспортное средство, в соответствии со стоп-сигналом целевого транспортного средства. Когда начало движения переднего транспортного средства можно предсказать, процесс переходит к этапу S11. С другой стороны, когда начало движения переднего транспортного средства непредсказуемо или когда текущая ситуация соответствует ситуации, в которой начало движения переднего транспортного средства непредсказуемо, процесс переходит к этапу S12.
[0105] На этапе S10, когда начало движения переднего транспортного средства непредсказуемо или когда текущая ситуация соответствует ситуации, в которой начало движения переднего транспортного средства непредсказуемо, процесс переходит к этапу S12. На этапе S12 контроллер 101 обнаруживает начало движения переднего транспортного средства в соответствии с информацией об окружении рассматриваемого транспортного средства. Например, контроллер 101 определяет начало движения переднего транспортного средства, когда положение переднего транспортного средства перемещается в направлении движения транспортного средства. На этом этапе рассматриваемое транспортное средство ожидает, пока не будет обнаружено начало движения транспортного средства впереди.
[0106] На этапе S10, когда предсказано начало движения переднего транспортного средства, процесс переходит к этапу S11. На этапе S11 контроллер 101 определяет, остановлено ли заднее транспортное средство. На этом этапе определяют остановку заднего транспортного средства, которое снова определяется как остановленное на этапе S6. Когда определяется, что заднее транспортное средство остановлено, процесс переходит к этапу S13. С другой стороны, когда определено, что заднее транспортное средство должно двигаться, контроллер 101 завершает процесс смены транспортного средства.
[0107] Когда заднее транспортное средство определено как остановленное на этапе S11, процесс переходит к этапу S13. На этапе S13 контроллер 101 включает указатель поворота, предусмотренный со стороны соседней полосы движения. Это позволяет сообщить водителю заднего транспортного средства, что транспортное средство сменит полосу движения, прежде чем он отпустит педаль тормоза. В результате водитель заднего транспортного средства продолжает нажимать педаль тормоза даже после того, как переднее транспортное средство начинает движение, тем самым повышая вероятность того, что рассматриваемое транспортное средство въедет впереди заднего транспортного средства.
[0108] Фиг. 3C иллюстрирует сцену, в которой истек предварительно определенный период времени от сцены, показанной на фиг. 3B, и представляет собой примерную сцену после того, как процессы этапов S10-S13, проиллюстрированных на фиг. 2B, были выполнены.
[0109] В сцене, показанной на фиг. 3C, контроллер 101 предсказывает начало движения транспортного средства X2, обнаруживая начало движения транспортного средства X1 (например, обнаруживает выключение стоп-сигнала транспортного средства X1) (определено ДА на этапе S10). Кроме того, контроллер 101 определяет, что транспортное средство X3 (заднее транспортное средство) должно быть остановлено (ДА на этапе S11). На этапе S13 контроллер 101 включает указатель поворота, предусмотренный на полосе L2 движения. В скобках указаны соответствующие процессы в блок-схеме последовательности операций, показанной на фиг. 2В.
[0110] Возвращаясь к фиг. 2B будет описана блок-схема последовательности операций процесса смены полосы движения. На этапе S14 контроллер 101 начинает выполнение управления движением для перемещения транспортного средства в местоположение въезда. Например, контроллер 101 генерирует целевую траекторию для смены полосы движения и устанавливает скорость рассматриваемого транспортного средства и угол поворота рулевого колеса для движения транспортного средства по целевой траектории. Затем контроллер 101 начинает перемещать рассматриваемое транспортное средство к местоположению въезда.
[0111] На этапе S15 контроллер 101 определяет, присутствует ли пространство въезда в местоположении въезда. Этот этап соответствует этапу S7. Таким образом, описание способа определения и т.п. упоминается выше. Когда определено, что пространство присутствует в местоположении въезда, процесс переходит к этапу S16, и контроллер 101 выполняет управление сменой полосы движения для перемещения рассматриваемого транспортного средства с рассматриваемой полосы движения на соседнюю полосу движения и завершает процесс смены транспортного средства. С другой стороны, когда в местоположении въезда определено, что нет пространства, процесс переходит к этапу S17.
[0112] Когда в местоположении въезда на этапе S15 определено, что нет пространства, процесс переходит к этапу S17. На этапе S17 контроллер 101 заставляет рассматриваемое транспортное средство ждать в предварительно определенном местоположении. Например, контроллер 101 генерирует воображаемую граничную линию, соединяя ближайшее местоположение переднего конца заднего транспортного средства к рассматриваемой полосе движения и ближайшее местоположение заднего конца переднего транспортного средства к рассматриваемой полосе движения. Затем контроллер 101 задает местоположение, в котором рассматриваемое транспортное средство не выходит за воображаемую граничную линию на целевой траектории, и ожидает пока рассматриваемое транспортное средство находится в заданном местоположении.
[0113] Фиг. 4A иллюстрирует сцену, в которой истек предварительно определенный период времени от сцены, показанной на фиг. 3C, и представляет собой примерную сцену после выполнения обработок этапа S14, этапа S15 и этапа S17, проиллюстрированных на фиг. 2В.
[0114] В сцене на фиг. 4A, контроллер 101 генерирует траекторию, по которой транспортное средство V планирует движение при смене полосы движения в качестве целевой траектории R, и перемещает транспортное средство V к местоположению въезда (этап S14). Кроме того, контроллер 101 определяет отсутствие пространства въезда в местоположении въезда (определение Нет на этапе S15) и ожидает пока рассматриваемое транспортное средство V находится в предварительно определенном местоположении (этап S17). В скобках указаны соответствующие процессы в блок-схеме последовательности операций, показанной на фиг. 2Б. В процессе этапа S14 или этапа S17 предполагается, что контроллер 101 не перемещает транспортное средство V ближе к полосе L2 движения, чем пунктирная линия E. Пунктирная линия E, показанная на фиг. 4A представляет собой воображаемую граничную линию, соединяющую угол, расположенный со стороны полосы L1 движения задней оконечной части транспортного средства X2, и угол, расположенный со стороны полосы L1 движения задней оконечной части транспортного средства X3.
[0115] Фиг. 4B иллюстрирует сцену, в которой истек предварительно определенный период времени от сцены, показанной на фиг. 4A, и представляет собой примерную сцену после выполнения процесса S15, показанного на фиг. 2В. В сцене на фиг. 4B, контроллер 101 определяет, что пространство въезда присутствует в местоположении въезда (определяется как ДА на этапе S15). В скобках указаны соответствующие процессы в блок-схеме последовательности операций, показанной на фиг. 2В.
[0116] Фиг. 4C иллюстрирует сцену, в которой истек заранее определенный период времени от сцены, показанной на фиг. 4B, и представляет собой примерную сцену после выполнения процесса S16, проиллюстрированного на фиг. 2В. В сцене на фиг. 4C, контроллер 101 перемещает рассматриваемое транспортное средство V по целевой траектории R, чтобы заставить рассматриваемое транспортное средство V въехать в местоположение между транспортным средством X2 и транспортным средством X3 (S16). Рассматриваемое транспортное средство V меняет полосу движения с полосы L1 движения на полосу L2 движения в дорожном заторе. Надписи в скобках указывают соответствующие процессы в блок-схеме последовательности операций, показанной на фиг. 2В.
[0117] Возвращаясь к фиг. 2B будет описана блок-схема последовательности операций процесса смены полосы движения. На этапе S18 контроллер 101 определяет, истекло ли предварительно определенное время. Когда определено, что предварительно определенное время истекло, процесс переходит к этапу S19. Когда определено, что предварительно определенное время не истекло, процесс возвращается к этапу S15. Предварительно определенное время является временем, определенным экспериментально, и не является конкретно ограниченным временем. Контроллер 101 может соответствующим образом изменить предварительно определенное время.
[0118] Когда предварительно определенное время определено как истекшее на этапе S18, процесс переходит к этапу S19. На этапе S19 контроллер 101 устанавливает местоположение движения рассматриваемого транспортного средства. Например, контроллер 101 устанавливает местоположение движения рассматриваемого транспортного средства в предварительно определенное местоположение рядом с центром рассматриваемой полосы движения и перемещает рассматриваемое транспортное средство из местоположения ожидания, установленного на этапе S17, в окрестности центра рассматриваемой полосы движения. Когда процесс на этапе S19 заканчивается, процесс возвращается к этапу S1, и обработка на этапе S1 и последующих этапах выполняется снова. Это позволяет снова обрабатывать смену полосы движения, даже когда на этапе S15 определено, что нет пространства в местоположении въезда, и рассматриваемое транспортное средство не может сменить полосу движения.
[0119] Как описано выше, в способе управления транспортным средством, выполняемом контроллером 100 транспортного средства согласно настоящему варианту осуществления, контроллер 101 получает информацию об окружении рассматриваемого транспортного средства с помощью группы 10 датчиков среды окружения и задает местоположение въезда, которое указывает местоположение пункта назначения въезда рассматриваемого транспортного средства и находится на соседней полосе движения, смежной с рассматриваемой полосой движения, в соответствии с полученной информацией об окружении рассматриваемого транспортного средства. Кроме того, контроллер 101 задает переднее транспортное средство, являющееся другим транспортным средством, расположенным перед местоположением въезда, и задает заднее транспортное средство, являющееся другим транспортным средством, расположенным за местоположением въезда, среди других транспортных средств, расположенных перед и за местоположением въезда. Контроллер 101 определяет состояние движения переднего транспортного средства и заднего транспортного средства и определяет, присутствует ли пространство въезда в местоположение въезда. Затем, когда определено, что переднее транспортное средство и заднее транспортное средство остановлено, и определено, что в местоположении въезда нет пространства въезда, контроллер 101 предсказывает, остановлено ли переднее транспортное средство. Когда предсказывается начало движения переднего транспортного средства, контроллер 101 начинает перемещение рассматриваемого транспортного средства к местоположению въезда. Это позволяет рассматриваемому транспортному средству начать перемещение в местоположение въезда до того, как заднее транспортное средство начнет движение, то есть пока заднее транспортное средство остановлено. Когда переднее транспортное средство фактически начинает движение, это транспортное средство перемещается к местоположению въезда или ожидает в предварительно определенном местоположении. Это увеличивает вероятность того, что водитель заднего транспортного средства остановит заднее транспортное средство, чтобы вызвать въезд транспортного средства. В результате, например, даже в ситуации, когда трудно въехать на соседнюю полосу движения из-за дорожного затора, рассматриваемое транспортное средство дает возможность смены полосы движения в соответствующий момент времени, и вероятность пропуска смены полосы движения может быть уменьшена.
[0120] Кроме того, в настоящем варианте осуществления другое транспортное средство, расположенное впереди переднего транспортного средства, задается в качестве целевого транспортного средства, и определяется, равно ли пройденное расстояние целевого транспортного средства в единицу времени предварительно определенному расстоянию или превышает предварительно определенное расстояние. Когда расстояние движения целевого транспортного средства в единицу времени определено равным или превышающим предварительно определенное расстояние, предсказывается, что переднее транспортное средство начнет движение. Это позволяет правильно предсказывать начало движения переднего транспортного средства до фактического начала движения.
[0121] Кроме того, в настоящем варианте осуществления, когда обнаруживается, что стоп-сигнал целевого транспортного средства выключен, контроллер 101 предсказывает, что переднее транспортное средство начинает движение. Это позволяет правильно предсказывать начало движения переднего транспортного средства до того, как оно действительно заведется.
[0122] В настоящем варианте осуществления, когда обнаруживается, что стоп-сигнал переднего транспортного средства выключен, контроллер 101 предсказывает, что переднее транспортное средство начинает движение. Обнаружение поведения переднего транспортного средства перед началом движения позволяет с хорошей точностью предсказывать начало движения переднего транспортного средства.
[0123] В настоящем варианте осуществления блок 107 предсказания получает информацию о светофорах, определяющих транспортный поток на соседних полосах движения. Блок 107 предсказания предсказывает, что переднее транспортное средство начнет движение, когда отображение светофора изменится с красного на синий. Это позволяет предсказывать начало движения переднего транспортного средства быстрее, чем предсказание начала движения переднего транспортного средства в соответствии с поведением целевого транспортного средства.
[0124] В настоящем варианте осуществления, когда определено, что в местоположения въезда нет пространства въезда, контроллер 101 устанавливает местоположение ожидания рассматриваемого транспортного средства на рассматриваемой полосе движения и предсказывает, начинает ли движение переднее транспортное средство, пока рассматриваемое транспортное средство ожидает в местоположении ожидания. Это позволяет рассматриваемому транспортному средству плавно начать перемещение к местоположению въезда. Местоположение ожидания удовлетворяет хотя бы одному из требований ниже. (i) Местоположение ожидания является предварительно определенным местоположением со стороны соседней полосы движения по отношению к центральной линии рассматриваемой полосы движения вдоль направления движения рассматриваемого транспортного средства. (ii) Местоположение ожидания является предварительно определенным местоположением позади задней части переднего транспортного средства. (iii) Передний конец рассматриваемого транспортного средства, расположенного в местоположении ожидания, находится позади конца переднего транспортного средства, и передний конец рассматриваемого транспортного средства, расположенного в местоположении ожидания, находится впереди переднего конца заднего транспортного средства.
[0125] В настоящем варианте осуществления определяется, что в местоположения въезда нет пространства въезда, контроллер 101 устанавливает местоположение ожидания рассматриваемого транспортного средства на рассматриваемой полосе движения и предсказывает, начинает ли движение переднее транспортное средство, пока рассматриваемое транспортное средство ожидает в местоположении ожидания. Местоположение ожидания является местоположением, в котором группа 10 датчиков среды окружения способна определять состояние целевого транспортного средства. Это позволяет надлежащим образом определять поведение целевого транспортного средства.
[0126] В настоящем варианте осуществления, когда предсказано начало движения переднего транспортного средства, контроллер 101 перемещает рассматриваемое транспортное средство в предварительно определенное местоположение. Это позволяет, если рассматриваемое транспортное средство начинает движение к местоположению въезда, не допустить, чтобы водитель заднего транспортного средства чувствовал какое-либо беспокойство и точно сообщить водителю заднего транспортного средства, что рассматриваемое транспортное средство планирует сменить полосу движения на соседнюю полосу движения. Предварительно определенное местоположение удовлетворяет следующим требованиям. Боковой конец рассматриваемого транспортного средства, расположенного в предварительно определенном местоположении, находится со стороны рассматриваемой полосы движения по отношению к воображаемой граничной линии, образованной соединением ближайшего местоположения переднего конца заднего транспортного средства к рассматриваемой полосе движения и ближайшего местоположения заднего конца переднего транспортного средства к рассматриваемой полосе движения.
[0127] В настоящем варианте осуществления, когда расстояние движения целевого транспортного средства в единицу времени меньше предварительно определенного расстояния, блок 107 предсказания предсказывает, что переднее транспортное средство не начнет движение. Когда начало движения переднего транспортного средства не предсказано, блок 108 управления движением выполняет ожидание рассматриваемого транспортного средства. Когда расстояние движения рассматриваемого транспортного средства мало, то маловероятно, что рассматриваемое транспортное средство сменит полосу движения, поскольку пространство между передним транспортным средством и задним транспортным средством не увеличивается. Настоящий вариант осуществления позволяет предотвратить перемещение рассматриваемого транспортного средства к местоположению въезда в ситуациях, когда смена полосы движения маловероятна.
[0128] В настоящем варианте осуществления, когда расстояние движения целевого транспортного средства за единицу времени равно или больше предварительно определенного расстояния, блок 107 предсказания предсказывает начало движения переднего транспортного средства в соответствии с пройденным расстоянием целевого транспортного средства, и блок 108 управления движением устанавливает расстояние перемещения к местоположению въезда транспортного средства. Это позволяет, если рассматриваемое транспортное средство начинает перемещение, предотвращать необязательный въезд рассматриваемого транспортного средства в переднее транспортное средство, поскольку переднее транспортное средство проезжает расстояние, соответствующее расстоянию движения целевого транспортного средства.
[0129] В настоящем варианте осуществления, когда настоящая ситуация соответствует ситуации, в которой начало движения переднего транспортного средства непредсказуемо, контроллер 101 перемещает рассматриваемое транспортное средство к местоположению въезда после обнаружения начала движения переднего транспортного средства. Это позволяет предотвратить перемещение рассматриваемого транспортного средства до начала движения переднего транспортного средства, когда начало движения переднего транспортного средства трудно предсказать, например, для крупногабаритных автомобилей.
[0130] В настоящем варианте осуществления ситуация, в которой выезд переднего транспортного средства непредсказуем, удовлетворяет по меньшей мере одному из следующих требований. Соседняя полоса движения имеет изогнутую форму. Переднее транспортное средство является крупногабаритным автомобилем. Таким образом, например, в ситуации, когда начало движения переднего транспортного средства трудно обнаружить, как у крупногабаритного автомобиля, контроллер 100 транспортного средства позволяет предотвратить перемещение рассматриваемого транспортного средства до начала движения переднего транспортного средства.
[0131] В настоящем варианте осуществления контроллер 101 включает указатель поворота со стороны соседней полосы движения, когда предсказано начало движения переднего транспортного средства. Это позволяет точно сообщить водителю другого транспортного средства, расположенного около транспортного средства, о том, что транспортное средство планирует сменить полосу движения с этой на соседнюю полосу движения до того, как заднее транспортное средство начнет движение.
[0132]<Второй вариант осуществления>
Далее будут описаны устройство управления транспортным средством и способ управления транспортным средством согласно другому варианту осуществления настоящего изобретения. В настоящем варианте осуществления часть функций блока 105 определения состояния движения, блока 107 предсказания и блока 108 управления движением отличается от первого варианта осуществления, описанного выше. Другие конфигурации и процессы управления такие же, как и в первом варианте осуществления, и поэтому будет сделана ссылка на приведенное выше описание. В нижеследующем описании предполагается, что заданы переднее транспортное средство, заднее транспортное средство и целевое транспортное средство, но, как описано в первом варианте осуществления, когда какое-либо транспортное средство не может быть задано, контроллер 100 транспортного средства использует только информацию заданного транспортного средства для обработки смены полосы движения.
[0133] Блок 105 определения состояния движения настоящего варианта осуществления определяет, движутся ли переднее транспортное средство, заднее транспортное средство и целевое транспортное средство. Например, когда скорость переднего транспортного средства меньше предварительно определенной скорости, когда расстояние движения переднего транспортного средства в единицу времени меньше предварительно определенного расстояния и когда стоп-сигналы переднего транспортного средства многократно включаются или выключаются через предварительно определенные интервалы блок 105 определения состояния движения определяет состояние движения переднего транспортного средства как медленное движение. Предварительно определенная скорость, единица времени, предварительно определенное расстояние и предварительно определенный интервал являются экспериментально определенными значениями и не являются конкретно ограниченными значениями. Блок 105 определения состояния движения может соответствующим образом изменять эти значения. В нижеследующем описании медленное движение описывается как пример одного варианта выполнения движения транспортного средства, но настоящее изобретение конкретно не ограничивается этим. Блок 105 определения состояния движения, даже когда переднее транспортное средство движется со скоростью, отличной от скорости, называемой медленным движением, может определять, что состояние движения переднего транспортного средства является движением.
[0134] Блок 107 предсказания настоящего варианта осуществления предсказывает, будет ли переднее транспортное средство ускоряться с заранее определенным ускорением или выше, когда блок 105 определения состояния движения определяет, что переднее транспортное средство, заднее транспортное средство и целевое транспортное средство движутся медленно, используя способ, описанный ниже.
[0135] Например, блок 107 предсказания, когда переднее транспортное средство, заднее транспортное средство и целевое транспортное средство определяется как медленно движущееся, предсказывает, будет ли переднее транспортное средство ускоряться с предварительно определенным ускорением или выше в соответствии с поведением целевого транспортного средства. Например, блок 107 предсказания определяет, равно ли расстояние движения целевого транспортного средства в единицу времени предварительно определенному расстоянию или превышает его, и предсказывает, ускоряется ли переднее транспортное средство с предварительно определенным ускорением или выше в ответ на результат определения. Когда расстояние движения целевого транспортного средства измерено и составляет предварительно определенное расстояние или больше, блок 107 предсказания предсказывает, что переднее транспортное средство ускоряется с предварительно определенным ускорением или выше. С другой стороны, когда расстояние движения целевого транспортного средства измерено и меньше предварительно определенного расстояния, блок 107 предсказания предсказывает, что переднее транспортное средство поддерживает медленное движение без ускорения.
[0136] Кроме того, блок 107 предсказания может предсказывать, ускоряется ли переднее транспортное средство с предварительно определенным ускорением или выше, аналогично способу предсказания начала движения переднего транспортного средства, в соответствии с изменением ситуации на соседней полосе движения. Приведенное выше описание включено в описание способа, соответствующего смене в ситуации соседней полосы движения.
[0137] Кроме того, блок 107 предсказания может определять, соответствует ли текущая ситуация ситуации, в которой ускорение переднего транспортного средства непредсказуемо. Если определено, что текущая ситуация подпадает под непредсказуемые ситуации, блок 107 предсказания может предсказывать, что переднее транспортное средство поддерживает медленное движение без ускорения, с предварительно определенным ускорением или выше. Между прочим, поскольку ситуация, в которой ускорение переднего транспортного средства непредсказуемо, аналогична ситуации, в которой начало движения переднего транспортного средства непредсказуемо, как описано выше, вышеупомянутое объяснение включено.
[0138] Блок 108 управления движением устанавливает местоположение ожидания рассматриваемого транспортного средства при предсказании, ускоряется ли переднее транспортное средство с предварительно определенным ускорением или выше на рассматриваемой полосе движения. Приведенное выше описание относится к местоположению ожидания. В настоящем варианте осуществления местоположение ожидания представлено местоположением относительно переднего транспортного средства, заднего транспортного средства или местоположения въезда.
[0139] Блок 108 управления движением перемещает рассматриваемое транспортное средство в местоположение ожидания, когда установлено местоположение ожидания рассматриваемого транспортного средства. Блок 108 управления движением устанавливает скорость транспортного средства у рассматриваемого транспортного средства в местоположении ожидания, так что относительная скорость рассматриваемого транспортного средства по отношению к скорости заднего транспортного средства составляет ноль км/ч, когда другое транспортное средство, расположенное в соседней полосе движения, движется медленно. Это позволяет, если заднее транспортное средство движется медленно, блоку 107 предсказания предсказать, ускоряется ли переднее транспортное средство в состоянии поддержания взаимного расположения между задним транспортным средством и местоположением ожидания.
[0140] Кроме того, блок 108 управления движением генерирует управляющий сигнал для включения указателя поворота, предусмотренного со стороны соседней полосы движения, когда предсказано ускорение, равное или превышающее предварительно определенное ускорение переднего транспортного средства, и когда определено заднее транспортное средство как медленно движущееся блоком 105 определения состояния движения в предсказанный момент времени. Кроме того, блок 108 управления движением формирует целевую траекторию во время смены полосы движения.
[0141] Далее процесс управления транспортным средством согласно настоящему варианту осуществления будет описан со ссылкой на фиг. 5A и 5B. Фиг. 5A и 5B являются блок-схемами последовательности операций процессов смены полосы движения, выполняемых контроллером 100 транспортного средства. Кроме того, со ссылкой на фиг. 6 и 7 будет описано движение рассматриваемого транспортного средства посредством контроллера 100 транспортного средства. Между прочим, приведенное выше описание будет относиться к тем же частям, что и обработка управления транспортным средством согласно первому варианту осуществления.
[0142] Этапы с S21 по S25 соответствуют этапам с S1 по S5, показанным на фиг. 2А. Таким образом, описание этих этапов упомянуто выше.
[0143] На этапе S26 контроллер 100 транспортного средства определяет состояние движения переднего транспортного средства, заднего транспортного средства и целевого транспортного средства. В частности, контроллер 100 транспортного средства определяет, все ли эти транспортные средства движутся. Например, контроллер 100 транспортного средства определяет состояние движения каждого транспортного средства на основе результата обнаружения, обнаруженного группой 10 датчиков среды окружения. Когда все транспортные средства определены как движущиеся, процесс переходит к этапу S27. С другой стороны, если по меньшей мере одно из транспортных средств определено как остановленное, контроллер 100 транспортного средства завершает процесс смены транспортного средства.
[0144] Фиг. 6A представляет собой пример сцены, в которой рассматриваемое транспортное средство V меняет полосу движения с полосы L1 движения на полосу L2 движения на дороге с двумя полосами движения на одной стороне (полоса L1 движения, полоса L2 движения). Фиг. 6A является схемой, соответствующей фиг. 3А. Сцена, показанная на фиг. 6A отличается тем, что каждое транспортное средство движется по сравнению со сценой, показанной на фиг. 3А. В остальном описание на фиг. 3A упоминалось. Между прочим, сцена, показанная на фиг. 6A, является примерной сценой после процессов этапов S21-S26, показанных на фиг. 5А. Центральная линия C1 указывает центральную линию полосы L1 движения вдоль направления движения рассматриваемого транспортного средства V, а центральная линия C2 указывает центральную линию полосы L2 движения вдоль направления движения рассматриваемого транспортного средства V.
[0145] В сцене, показанной на фиг. 6A, контроллер 100 рассматриваемого транспортного средства определяет, что транспортное средство достигло места смены полосы движения (не показано) (определяется как ДА на этапе S23), и задает местоположение между другим транспортным средством X2 и другим транспортным средством X3 в качестве местоположения въезда (этап S24). Кроме того, контроллер 100 транспортного средства задает транспортное средство X2, расположенное перед местоположением въезда как переднее транспортное средство, транспортное средство X3, расположенное за местоположением въезда как заднее транспортное средство, другое транспортное средство X1, расположенное впереди транспортного средства X2, соответственно, заданное как целевое транспортное средство (этап S25). Контроллер 100 транспортного средства определяет, что транспортные средства X1-X3 движутся в соответствии с информацией об окружении рассматриваемого транспортного средства (ДА определяется на этапе S26). В скобках указаны соответствующие процессы в блок-схеме последовательности операций, показанной на фиг. 5А.
[0146] Возвращаясь к фиг. 5A будет описана блок-схема последовательности операций процесса смены полосы движения. Этап S27 соответствует этапу S7, показанному на фиг. 2А. Таким образом, описание этапа S27 упоминается выше.
[0147] Если определено, что в местоположении въезда на этапе S27 отсутствует пространство въезда, процесс переходит к этапу S28. На этапе S28 контроллер 100 рассматриваемого транспортного средства устанавливает местоположение ожидания для ожидания рассматриваемого транспортного средства перед сменой полосы движения. Например, контроллер 100 транспортного средства устанавливает местоположение ожидания со стороны соседней полосы движения относительно центральной линии рассматриваемой полосы движения вдоль направления движения рассматриваемого транспортного средства. Местоположение ожидания представлено, например, в местоположении относительно заднего транспортного средства. На фиг. 6A, местоположение ожидания установлено со стороны полосы L2 движения по отношению к центральной линии C1 полосы L1 движения.
[0148] На этапе S29 контроллер 100 рассматриваемого транспортного средства выполняет управление для ожидания рассматриваемого транспортного средства в местоположении ожидания, установленном на этапе S28. Например, контроллер 100 транспортного средства устанавливает скорость транспортного средства и угол поворота рулевого колеса в местоположение ожидания, скорость транспортного средства в местоположении ожидания (относительная скорость рассматриваемого транспортного средства к скорости заднего транспортного средства составляет ноль км/ч), угол, под которым передний конец рассматриваемого транспортного средства обращен в местоположение ожидания, и т.п. Затем контроллер 100 транспортного средства выдает управляющий сигнал, включающий в себя заданное содержимое, в контроллер 60 исполнительных механизмов.
[0149] Фиг. 6B показывает сцену, в которой истек предварительно определенный период времени от сцены, показанной на фиг. 6A, и представляет собой примерную сцену после того как выполнены обработки этапов с S27 по S29, показанных на фиг. 5А. Фиг. 6B соответствует фиг. 3A, описанной в первом варианте осуществления.
[0150] В сцене, показанной на фиг. 6B, поскольку расстояние (l1') между транспортным средством X2 и транспортным средством X3 меньше, чем предварительно определенное расстояние, контроллер 100 транспортного средства определяет отсутствие пространства въезда в местоположения въезда (определение НЕТ на этапе S27). Кроме того, контроллер 100 транспортного средства устанавливает местоположение ожидания рассматриваемого транспортного средства V для выполнения процесса предсказания на рассматриваемой полосе движения (этап S28) и вызывает ожидание рассматриваемого транспортного средства V в местоположении ожидания (этап S29). Затем контроллер 100 транспортного средства предсказывает, ускоряется ли переднее транспортное средство (транспортное средство X2) с предварительно определенным ускорением или более, в то время как транспортное средство V находится в местоположении ожидания. В скобках указаны соответствующие процессы в блок-схеме последовательности операций, показанной на фиг. 5А.
[0151] Целевая траектория R’ и пунктирная линия D’, показанные на фиг. 6B соответствуют целевой траектории R и пунктирной линии D, показанной на фиг. 3В. Таким образом, приведенное выше описание будет ссылаться на эти описания.
[0152] Возвращаясь к фиг. 5B будет описана блок-схема последовательности операций процесса смены полосы движения. На этапе S30 контроллер 100 транспортного средства определяет, предсказуемо ли ускорение переднего транспортного средства. Например, контроллер 100 транспортного средства определяет, равно ли расстояние движения целевого транспортного средства в единицу времени предварительно определенному расстоянию или превышает его, предсказывает, начинает ли движение переднее транспортное средство, в ответ на результат определения. Когда ускорение переднего транспортного средства предсказуемо, процесс переходит к этапу S31. С другой стороны, когда ускорение переднего транспортного средства непредсказуемо или когда текущая ситуация соответствует ситуации, в которой ускорение переднего транспортного средства непредсказуемо, процесс переходит к этапу S32.
[0153] На этапе S30, когда ускорение переднего транспортного средства непредсказуемо или когда текущая ситуация соответствует ситуации, в которой ускорение переднего транспортного средства непредсказуемо, процесс переходит к этапу S32. На этапе S32 контроллер 100 транспортного средства обнаруживает ускорение переднего транспортного средства (ускорение выше предварительно определенного ускорения) в соответствии с информацией об окружении транспортного средства. Между прочим, на этом этапе процесс ожидает, пока не будет обнаружено ускорение переднего транспортного средства.
[0154] Если ускорение переднего транспортного средства предсказуемо на этапе S30, процесс переходит к этапу S31. На этапе S31 контроллер 100 транспортного средства определяет, движется ли заднее транспортное средство, поддерживая скорость. Этот этап предназначен для определения, движется ли транспортное средство, определенное как движущееся на этапе S26, с сохранением скорости. Когда определено, что заднее транспортное средство движется с сохранением скорости, процесс переходит к этапу S33. С другой стороны, когда заднее транспортное средство определяется как движущееся с изменением скорости, контроллер 100 транспортного средства прекращает процесс смены транспортного средства.
[0155] Когда заднее транспортное средство определяется как движущееся на этапе S31, процесс переходит к этапу S33. Этап S33 соответствует этапу S13, показанному на фиг. 2В. Таким образом, описание этапа S33 упоминается выше.
[0156] Фиг. 6C иллюстрирует сцену, в которой истек предварительно определенный период времени от сцены, показанной на фиг. 6B, и представляет собой примерную сцену после выполнения процесса этапов с S30 по S33, проиллюстрированного на фиг. 5В. Фиг. 6C соответствует фиг. 3C, описанной в первом варианте осуществления.
[0157] В сцене, показанной на фиг. 6C, контроллер 100 транспортного средства предсказывает, что транспортное средство X2 будет ускоряться с предварительно определенным ускорением или более (ДА на этапе S30), обнаруживая, что расстояние движения транспортного средства X1 составляет по меньшей мере предварительно определенное расстояние. Кроме того, контроллер 100 транспортного средства определяет, что транспортное средство X3 (заднее транспортное средство) движется, поддерживая скорость (ДА на этапе S31). На этапе S33 контроллер 100 транспортного средства включает указатель поворота, предусмотренный со стороны полосы L2 движения. В скобках указаны соответствующие процессы в блок-схеме последовательности операций, показанной на фиг. 5Б.
[0158] Возвращаясь к фиг. 5B будет описана блок-схема процесса смены полосы движения. Этапы с S34 по S39 соответствуют этапам с S14 по S19, показанным на фиг. 2В. Таким образом, описание этих этапов будет ссылаться на вышеприведенное. Фиг. 7A иллюстрирует сцену, в которой истек заранее определенный период времени от сцены, показанной на фиг. 6C, и представляет собой примерную сцену после выполнения процесса, проиллюстрированного на фиг. 5В. ФИГ. 7A соответствует фиг. 4A, описанной в первом варианте осуществления.
[0160] В сцене на фиг. 7A, контроллер 100 транспортного средства генерирует целевую траекторию R’ для смены полосы движения и перемещает транспортное средство V к местоположению въезда (этап S34). Кроме того, контроллер 100 транспортного средства определяет, что в местоположении въезда нет пространства въезда (определение Нет на этапе S35), и выполняет ожидание рассматриваемого транспортного средства V в предварительно определенном местоположении (этап S37). В скобках указаны соответствующие процессы в блок-схеме последовательности операций, показанной на фиг. 5Б. Пунктирная линия E 'соответствует пунктирной линии E, показанной на фиг. 4А. Объяснение пунктирной линии E 'должно использоваться вместе с объяснением, данным выше.
[0161] Фиг. 7B иллюстрирует сцену, в которой истек предварительно определенный период времени от сцены, показанной на фиг. 7A, и представляет собой примерную сцену после выполнения процесса, проиллюстрированного на фиг. 5В. Фиг. 7B соответствует фиг. 4B, описанной в первом варианте осуществления. В сцене на фиг. 7B, контроллер 100 транспортного средства определяет, что в местоположении въезда нет пространства въезда (определяется как ДА на этапе S35). В скобках указаны соответствующие процессы в блок-схеме последовательности операций, показанной на фиг. 5В.
[0162] Фиг. 7C иллюстрирует сцену, в которой истек предварительно определенный период времени от сцены, показанной на фиг. 7B, и представляет собой примерную сцену после выполнения процесса, проиллюстрированного на фиг. 5В. Фиг. 7C соответствует фиг. 4С, описанной в первом варианте осуществления. В сцене на фиг. 7C, контроллер 100 транспортного средства заставляет рассматриваемое транспортное средство V въехать в местоположение между транспортным средством X2 и транспортным средством X3, перемещая рассматриваемое транспортное средство V по целевой траектории R’. Транспортное средство V меняет полосу движения с полосы L1 движения на полосу L2 движения. В скобках указаны соответствующие процессы в блок-схеме последовательности операций, показанной на фиг. 5В.
[0163] Как описано выше, в настоящем варианте осуществления в рассматриваемом способе управления транспортным средством, выполняемом контроллером 100 транспортного средства согласно настоящему варианту осуществления, когда переднее транспортное средство и заднее транспортное средство определены как движущиеся и что нет пространства въезда в местоположении въезда, контроллер 100 транспортного средства предсказывает, будет ли переднее транспортное средство ускоряться с предварительно определенным ускорением или более, и когда предсказано ускорение переднего транспортного средства, контроллер 100 транспортного средства перемещает рассматриваемое транспортное средство к местоположению въезда. Это позволяет рассматриваемому транспортному средству начать движение к местоположению въезда до того, как заднее транспортное средство разгонится, то есть пока заднее транспортное средство движется с сохранением скорости. Когда переднее транспортное средство фактически ускоряется с предварительно определенным ускорением или выше, рассматриваемое транспортное средство движется к местоположению въезда или ожидает в предварительно определенном местоположении. Это побуждает водителя заднего транспортного средства сохранять или замедлять скорость заднего транспортного средства и позволяет рассматриваемому транспортному средству легко въехать. В результате, например, если дорожный затор препятствует въезду рассматриваемого транспортного средства на соседнюю полосу движения, смена полосы движения разрешается в соответствующее время, и вероятность пропуска смены полосы движения может быть уменьшена.
[0164] Следует принимать во внимание, что описанные ранее варианты осуществления описаны для облегчения понимания настоящего изобретения и не описаны для ограничения настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеуказанных вариантах осуществления, включают в себя все изменения в конструкции и эквиваленты, подпадающие под объем технических сведений в настоящем изобретении.
[0165] Например, в первом варианте осуществления, описанном выше, обработка смены полосы движения выполняется, когда переднее транспортное средство и целевое транспортное средство остановлено, во втором варианте осуществления, описанном выше, обработка смены полосы движения выполняется, когда переднее транспортное средство и целевое транспортное средство транспортное средство движутся. Однако эту обработку смены полосы движения можно комбинировать. То есть, когда блок 105 определения определяет, что каждое транспортное средство должно быть остановлено, может выполняться процесс смены полосы движения в первом варианте осуществления. С другой стороны, когда определено, что каждое транспортное средство движется, может быть выполнен процесс смены полосы движения во втором варианте осуществления. Это позволяет выполнять смену полосы движения в надлежащее время в ситуациях, когда въезд на соседние полосы движения затруднен из-за отсутствия пространства въезда, независимо от состояния движения каждого транспортного средства.
[0166] Например, в этом описании устройство управления транспортным средством согласно настоящему изобретению будет описано на примере контроллера 100 транспортного средства, но настоящее изобретение этим не ограничивается. Кроме того, в этом описании первая полоса движения в соответствии с настоящим изобретением будет описана как пример рассматриваемой полосы движения, но настоящее изобретение этим не ограничивается. Кроме того, в этом описании вторая полоса движения согласно настоящему изобретению будет описана как пример соседней полосы движения, но настоящее изобретение этим не ограничивается. Кроме того, в этом описании блок получения в соответствии с настоящим изобретением будет описан с использованием блока 102 получения информации в качестве примера, но настоящее изобретение этим не ограничивается. Кроме того, в этом описании первый конкретный блок и второй конкретный блок в соответствии с настоящим изобретением описаны в качестве примера относительно блока 104 задания, но настоящее изобретение этим не ограничивается. В этом описании первый блок определения согласно настоящему изобретению описан на примере блока 105 определения состояния движения, но настоящее изобретение этим не ограничивается. Кроме того, в этом описании второй блок определения согласно настоящему изобретению описан с использованием блока 106 определения наличия пространства в качестве примера, но настоящее изобретение этим не ограничивается. В этом описании блок управления движением согласно настоящему изобретению описан на примере блока 108 управления движением, но настоящее изобретение этим не ограничивается.
[ПОЯСНЕНИЯ ССЫЛОЧНЫХ ПОЗИЦИЙ]
[0167]
10 ... Группа датчиков среды окружения
11 ... Радар
12 ... Устройство формирования изображения
20 ... Группа датчиков транспортного средства
21 ... Датчик скорости транспортного средства
22 ... Акселерометр
23 ... Гироскопический датчик
24 ... Датчик угла поворота рулевого колеса
25 ... Датчик акселератора
26 ... Датчик тормоза
30 ... Навигационная система
31 ... GPS
32 ... Коммуникатор
33 ... Навигационный контроллер
40 ... Картографическая база данных
50 ... HMI
60 ... Контроллер исполнительных механизмов
70 ... Группа исполнительных механизмов транспортного средства
71 ... Исполнительный механизм рулевого управления
72 ... Исполнительный механизм акселератора
73 ... Исполнительный механизм управления тормозом
80 ... Указатель поворота
100 ... Контроллер транспортного средства
101 ... Блок получения
102 ... Приемник
103 ... Блок распознавания ситуации
104 ... Блок задания
105 ... Блок определения состояния движения
106 ... Блок определения наличия пространства
107 ... Блок предсказания
108 ... Блок управления движением
200 ... Система транспортного средства
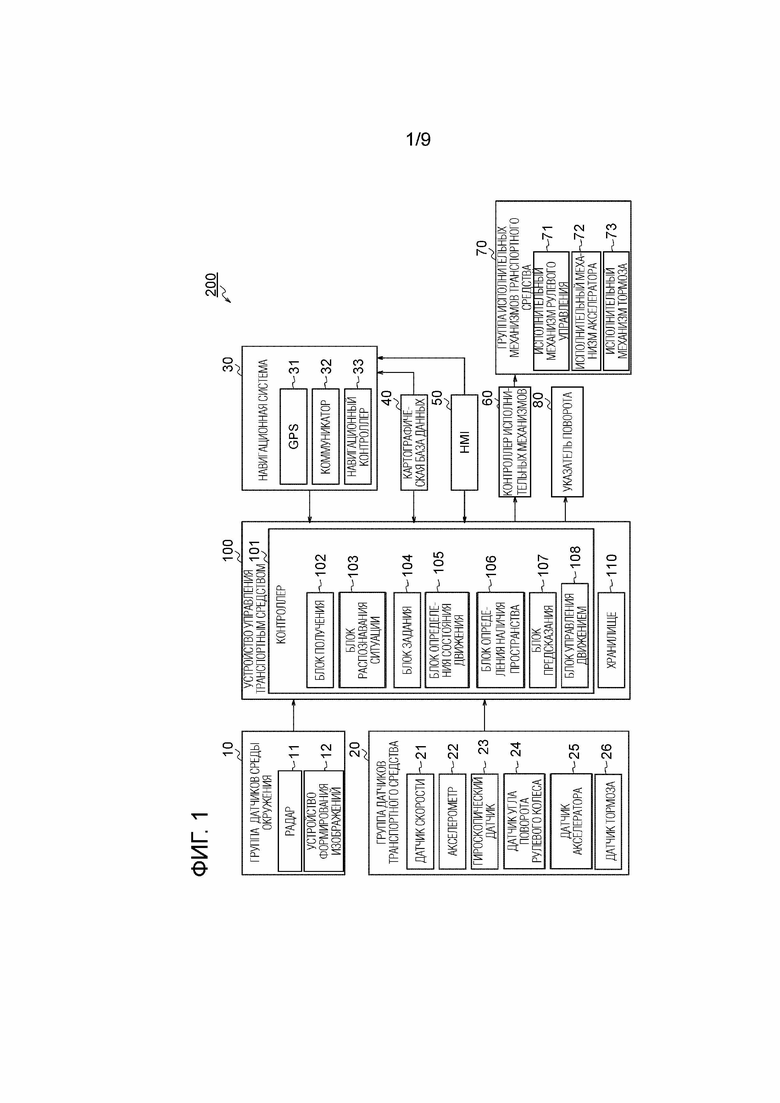
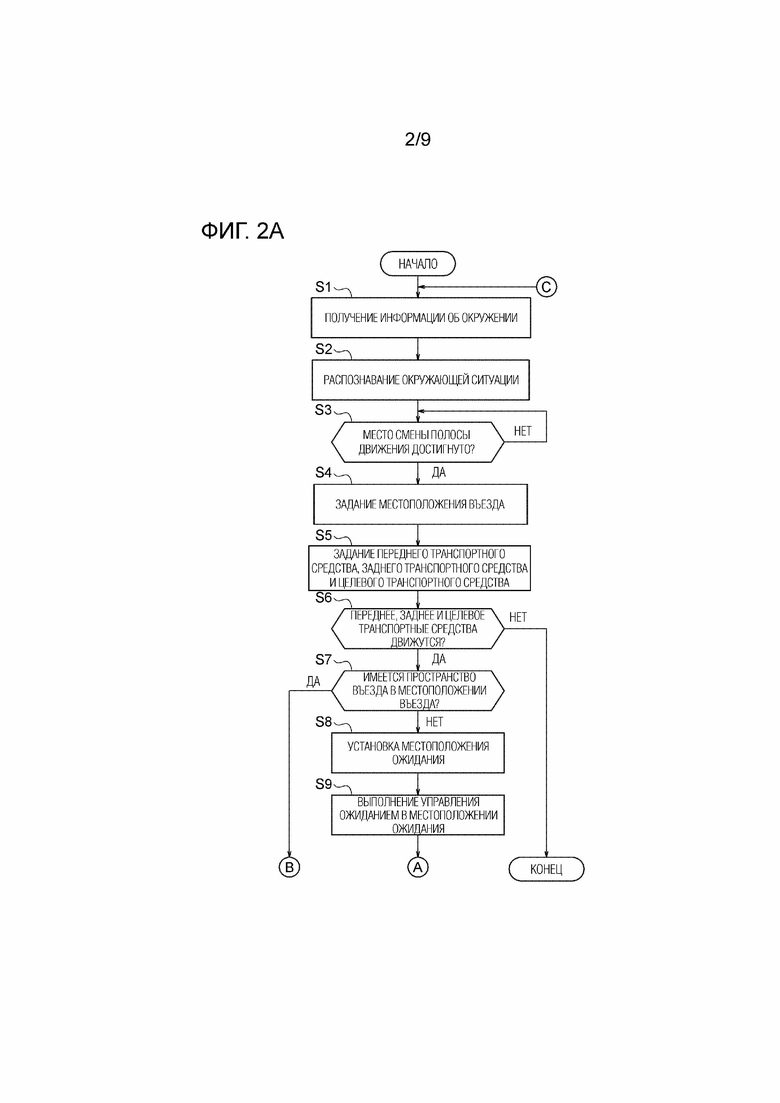
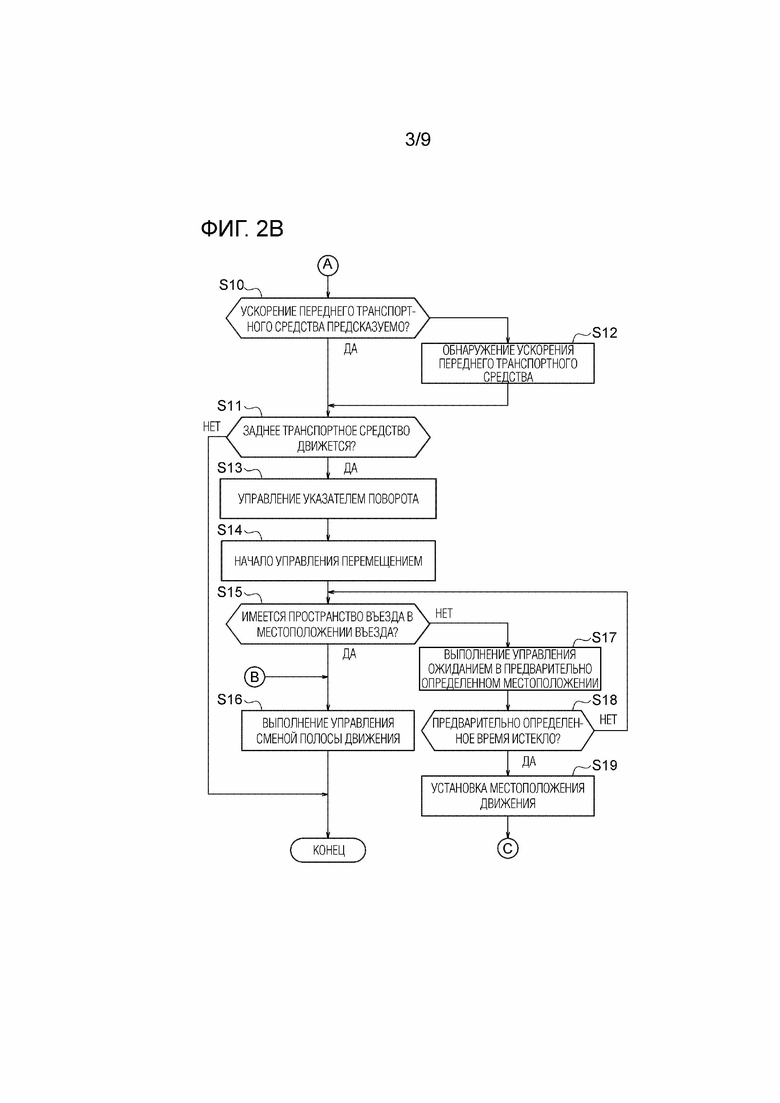
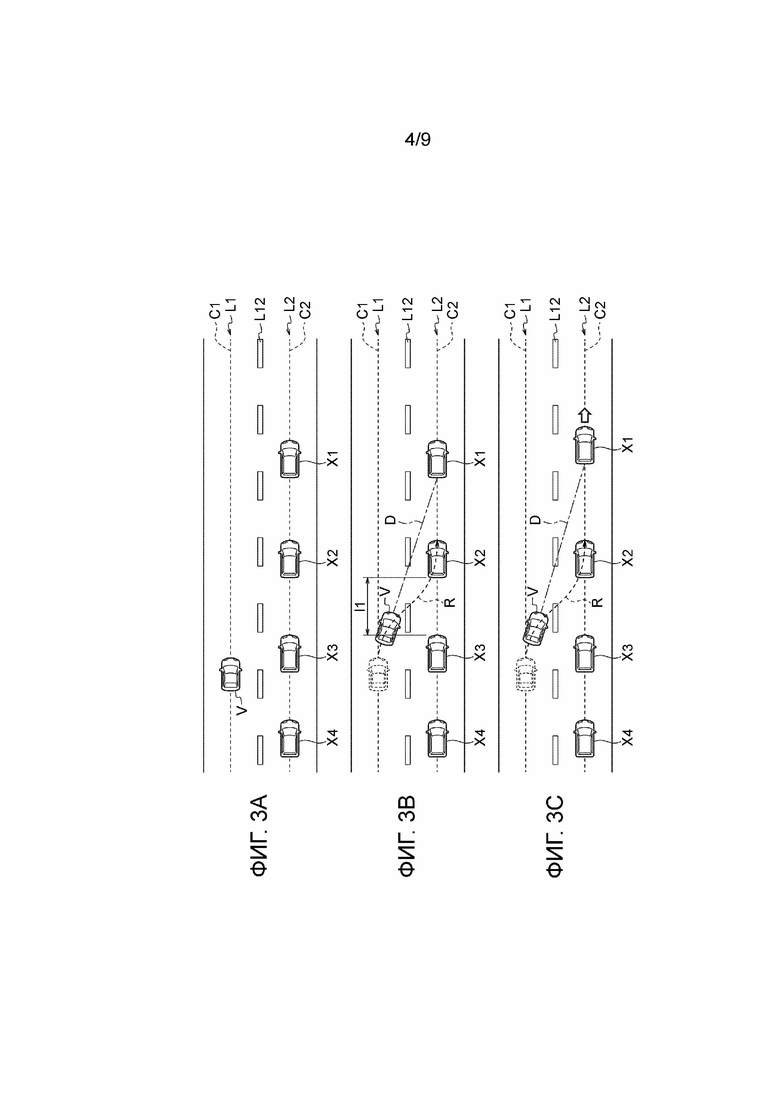
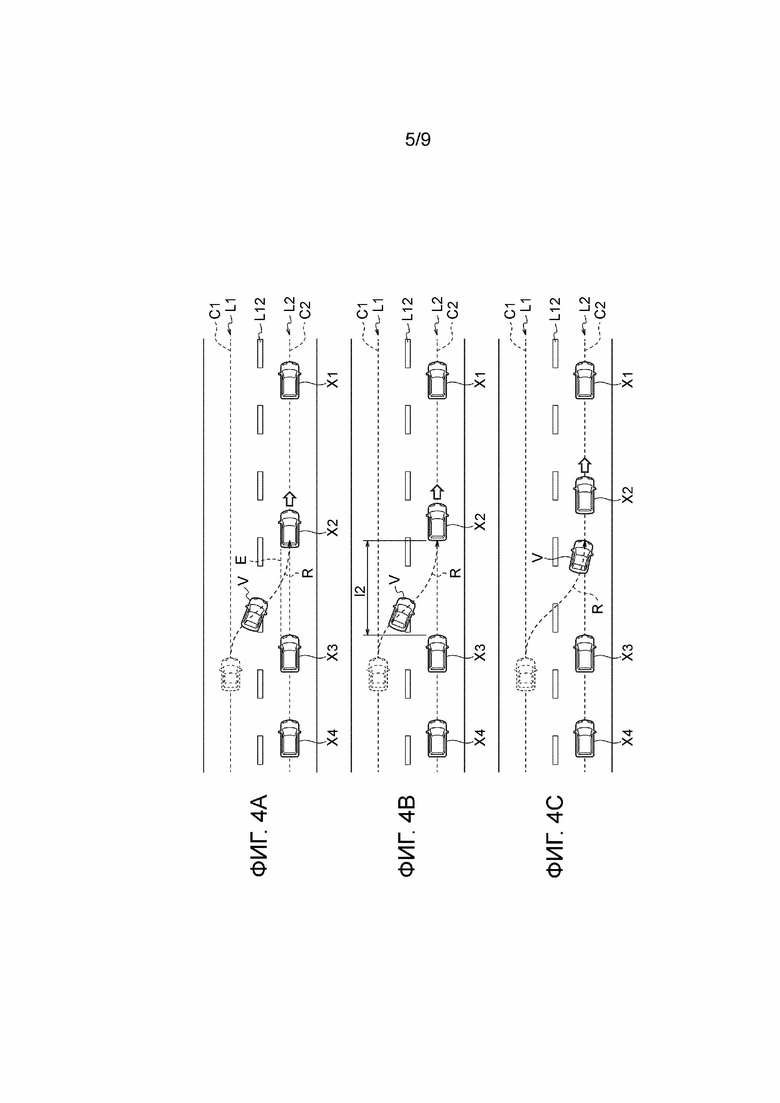
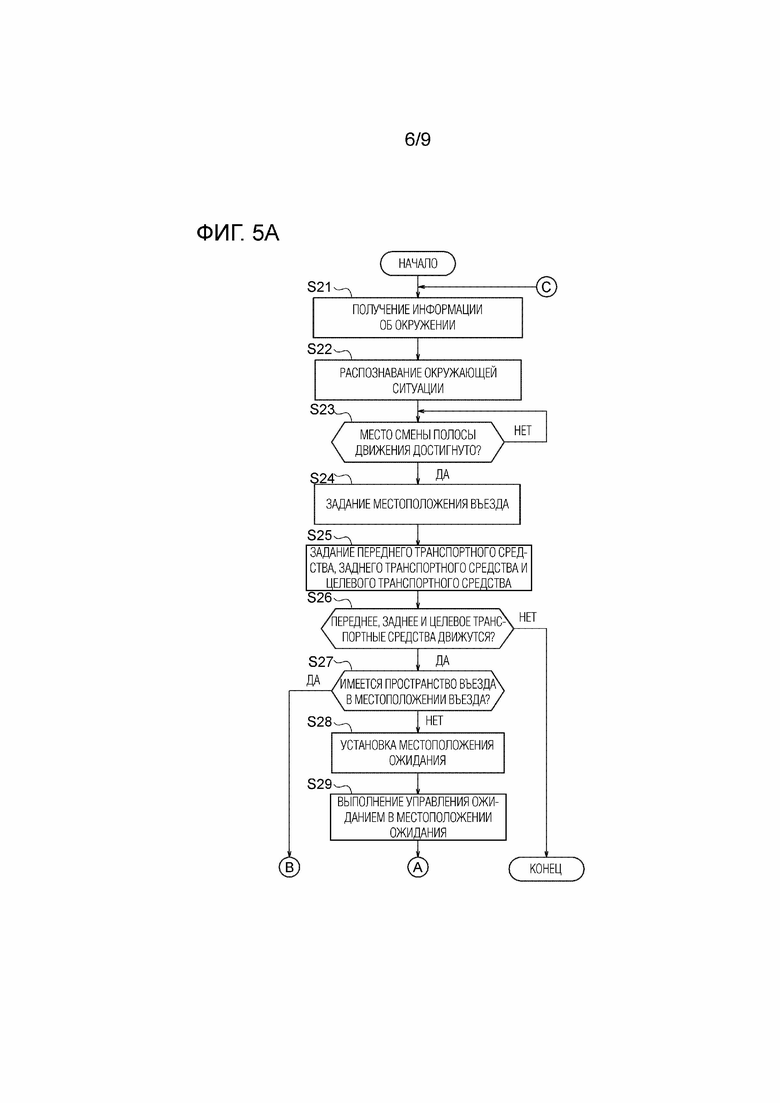
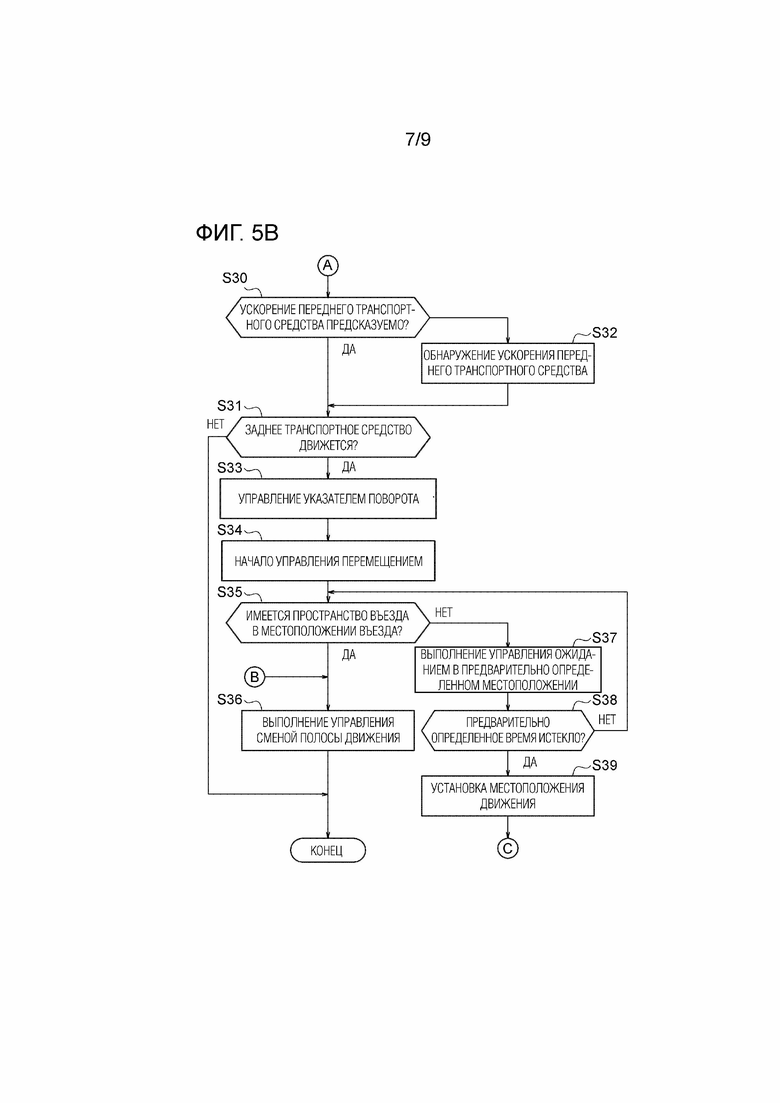
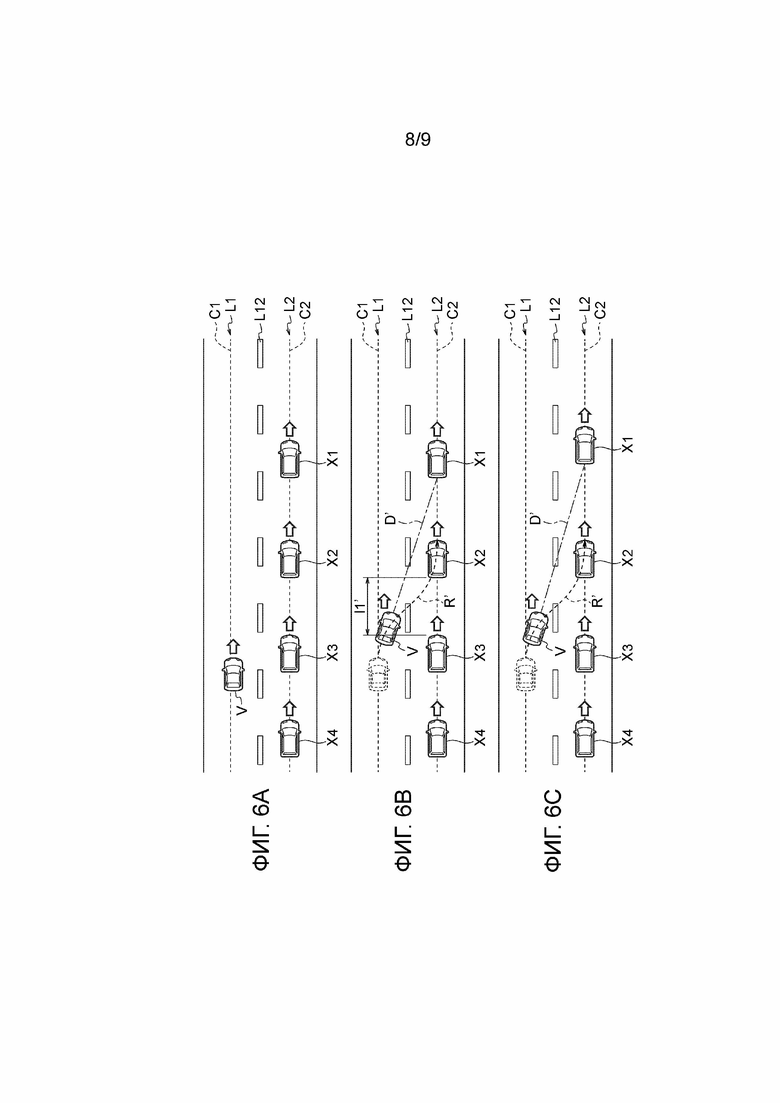
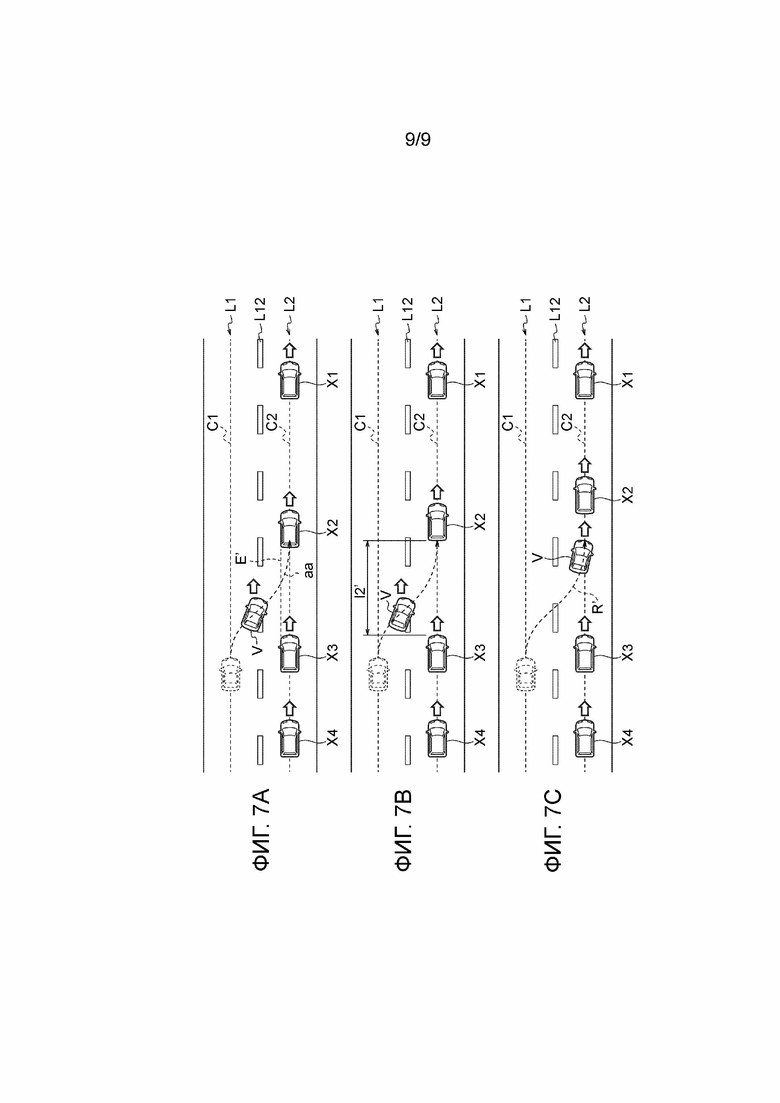
Получают информацию об окружении рассматриваемого транспортного средства (V) с помощью датчика, обеспеченного в рассматриваемом транспортном средстве (V). Задают местоположение въезда, расположенное на второй полосе движения (L2), смежной с первой полосой движения (L1), по которой движется рассматриваемое транспортное средство (V), в соответствии с информацией об окружении перед рассматриваемым транспортным средством (V). Местоположение въезда указывает местоположение, в которое въезжает рассматриваемое транспортное средство (V). Задают переднее транспортное средство (X2), расположенное перед местоположением въезда, и заднее транспортное средство (X3), расположенное за местоположением въезда, среди других транспортных средств. Определяют состояние движения переднего транспортного средства (X2) и заднего транспортного средства (X3). Определяют, имеется ли пространство для въезда рассматриваемого транспортного средства (V) в местоположении въезда. Предсказывают, начинает ли движение переднее транспортное средство (X2), при определении того, что переднее транспортное средство (X2) и заднее транспортное средство (X1) остановлены и нет пространства в местоположении въезда. Начинают перемещение рассматриваемого транспортного средства (V) в местоположение въезда, когда предсказано начало движения переднего транспортного средства (X2). Предложено также устройство управления транспортным средством. Достигается уменьшение вероятности пропуска смены полосы движения. 2 н. и 13 з.п. ф-лы, 17 ил.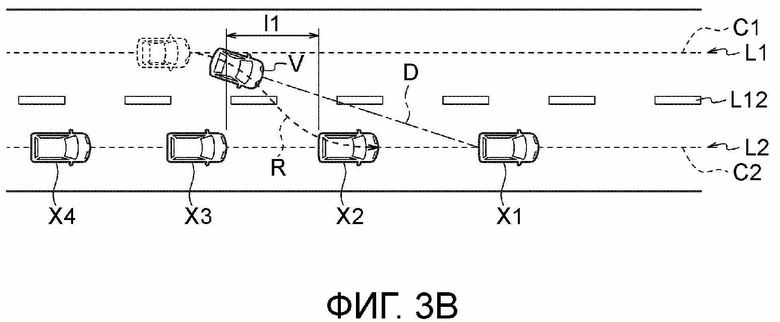
1. Способ управления транспортным средством, выполняемый процессором, выполненным с возможностью выполнения смены полосы движения рассматриваемого транспортного средства, содержащий этапы, на которых:
получают информацию об окружении рассматриваемого транспортного средства с помощью датчика, обеспеченного в рассматриваемом транспортном средстве;
задают местоположение въезда, расположенное на второй полосе движения, смежной с первой полосой движения, по которой движется рассматриваемое транспортное средство, в соответствии с информацией об окружении перед рассматриваемым транспортным средством, причем местоположение въезда указывает местоположение, в которое въезжает рассматриваемое транспортное средство;
задают переднее транспортное средство, расположенное перед местоположением въезда, и заднее транспортное средство, расположенное за местоположением въезда, среди других транспортных средств;
определяют состояние движения переднего транспортного средства и заднего транспортного средства соответственно;
определяют, имеется ли пространство для въезда рассматриваемого транспортного средства в местоположении въезда;
предсказывают, начинает ли движение переднее транспортное средство, при определении того, что переднее транспортное средство и заднее транспортное средство остановлены и нет пространства в местоположении въезда; и
начинают перемещение рассматриваемого транспортного средства в местоположение въезда, когда предсказано начало движения переднего транспортного средства.
2. Способ управления транспортным средством по п. 1, дополнительно содержащий этапы, на которых:
задают целевое транспортное средство, являющееся другим транспортным средством, расположенным впереди переднего транспортного средства;
определяют, является ли расстояние проезда целевого транспортного средства в единицу времени равным или большим, чем предварительно определенное расстояние; и
предсказывают начало движения переднего транспортного средства, когда определено, что расстояние движения целевого транспортного средства больше или равно предварительно определенному расстоянию.
3. Способ управления транспортным средством по п. 1 или 2, дополнительно содержащий этапы, на которых:
задают целевое транспортное средство, являющееся другим транспортным средством, расположенным впереди переднего транспортного средства; и
предсказывают начало движения переднего транспортного средства, когда обнаружено, что стоп-сигнал целевого транспортного средства выключен.
4. Способ управления транспортным средством по любому из пп. 1-3, дополнительно содержащий этап, на котором:
предсказывают начало движения переднего транспортного средства, когда обнаружено, что стоп-сигнал переднего транспортного средства выключен.
5. Способ управления транспортным средством по любому из пп. 1-4, дополнительно содержащий этапы, на которых:
получают информацию о сигнале светофора, определяющем транспортный поток на второй полосе движения, от устройства, выполненного с возможностью связи с внешним окружением транспортного средства, и
предсказывают начало движения переднего транспортного средства, когда цвет индикатора светофора изменится с красного на синий.
6. Способ управления транспортным средством по любому из пп. 1-5, дополнительно содержащий этапы, на которых:
устанавливают местоположение ожидания рассматриваемого транспортного средства на первой полосе движения, когда определено, что нет пространства в местоположении въезда; и
предсказывают, начнет ли движение переднее транспортное средство, при этом удерживая рассматриваемое транспортное средство в ожидании в местоположении ожидания, при этом
местоположение ожидания удовлетворяет по меньшей мере одному из следующих требований:
местоположение ожидания находится со стороны второй полосы движения относительно центральной линии первой полосы движения вдоль направления движения транспортного средства,
местоположение ожидания находится за передним транспортным средством,
передний конец рассматриваемого транспортного средства, находящегося в местоположении ожидания, находится за задней частью переднего транспортного средства, и передний конец рассматриваемого транспортного средства, находящегося в местоположении ожидания, находится перед передним концом заднего транспортного средства.
7. Способ управления транспортным средством по любому из пп. 1-6, дополнительно содержащий этапы, на которых:
задают целевое транспортное средство, являющееся другим транспортным средством, расположенным впереди переднего транспортного средства;
устанавливают местоположение ожидания рассматриваемого транспортного средства на первой полосе движения, когда определено, что нет пространства в местоположении въезда; и
предсказывают, начнет ли движение переднее транспортное средство, при этом удерживая рассматриваемое транспортное средство в ожидании в местоположении ожидания, при этом
местоположение ожидания является местоположением в пределах диапазона обнаружения датчика.
8. Способ управления транспортным средством по любому из пп. 1-7, дополнительно содержащий этап, на котором:
перемещают рассматриваемое транспортное средство в предварительно определенное местоположение, когда предсказано начало движения переднего транспортного средства, при этом
предварительно определенное местоположение удовлетворяет приведенным ниже требованиям,
боковой конец стороны второй полосы движения рассматриваемого транспортного средства, расположенный в предварительно определенном местоположении, находится со стороны первой полосы движения относительно воображаемой граничной линии, образованной путем соединения ближайшего местоположения к первой полосе движения переднего конца заднего транспортного средства и ближайшего местоположения к первой полосе движения заднего конца переднего транспортного средства.
9. Способ управления транспортным средством по п. 2, дополнительно содержащий этапы, на которых:
предсказывают, что переднее транспортное средство не начинает движение, когда расстояние движения целевого транспортного средства меньше предварительно определенного расстояния; и
удерживают рассматриваемое транспортное средство в ожидании, когда предсказано, что переднее транспортное средство не начнет движение.
10. Способ управления транспортным средством по п. 2, дополнительно содержащий этапы, на которых:
предсказывают начало движения переднего транспортного средства, когда расстояние движения целевого транспортного средства равно или превышает предварительно определенное расстояние; и
устанавливают расстояние движения рассматриваемого транспортного средства к местоположению въезда в соответствии с расстоянием движения целевого транспортного средства.
11. Способ управления транспортным средством по любому из пп. 1-10, дополнительно содержащий этап, на котором:
начинают перемещение рассматриваемого транспортного средства к местоположению въезда после обнаружения начала движения переднего транспортного средства, когда текущая ситуация подпадает под ситуацию, в которой начало движения переднего транспортного средства непредсказуемо.
12. Способ управления транспортным средством по п.11, в котором
ситуация, в которой начало движения переднего транспортного средства непредсказуемо, удовлетворяет по меньшей мере одному из следующих требований:
форма дороги второй полосы движения является изогнутой и
переднее транспортное средство является крупногабаритным автомобилем.
13. Способ управления транспортным средством по любому из пп. 1-12, дополнительно содержащий этап, на котором:
включают указатель поворота со стороны второй полосы движения, когда предсказано начало движения переднего транспортного средства.
14. Способ управления транспортным средством по любому из пп. 1-13, дополнительно содержащий этапы, на которых:
предсказывают, ускоряется ли переднее транспортное средство с предварительно определенным ускорением или более, когда переднее транспортное средство и заднее транспортное средство определены как движущиеся и определено, что нет пространства для въезда рассматриваемого транспортного средства; и
перемещают рассматриваемое транспортное средство в местоположение въезда, когда предсказано ускорение рассматриваемого транспортного средства.
15. Устройство управления транспортным средством, выполненное с возможностью смены полосы движения рассматриваемого транспортного средства с помощью устройства управления, содержащее:
блок получения, получающий информацию об окружении рассматриваемого транспортного средства с помощью датчика, обеспеченного в рассматриваемом транспортном средстве;
первый блок задания, задающий местоположение въезда, расположенное на второй полосе движения, смежной с первой полосой движения, по которой движется рассматриваемое транспортное средство, в соответствии с информацией об окружении транспортного средства, причем местоположение въезда указывает местоположение, в которое въезжает рассматриваемое транспортное средство;
второй блок задания, задающий переднее транспортное средство, расположенное впереди местоположения въезда, и заднее транспортное средство, расположенное позади местоположения въезда;
первый блок определения, определяющий состояние движения каждого из переднего транспортного средства и заднего транспортного средства,
второй блок определения, определяющий, имеется ли пространство для въезда рассматриваемого транспортного средства в местоположении въезда;
блок предсказания, предсказывающий начинает ли движение переднее транспортное средство, когда первый блок определения определяет, что переднее транспортное средство и заднее транспортное средство остановлены, а второй блок определения определяет, что в местоположении въезда нет пространства; и
блок управления движением, начинающий перемещение рассматриваемого транспортного средства к местоположению въезда, когда предсказано начало движения переднего транспортного средства.
| JP 2016203745 A, 08.12.2016 | |||
| WO 2018220807 A1, 06.12.2018 | |||
| WO 2018193535 A1, 25.10.2018. |

