Изобретение относится к способу эксплуатации транспортного средства, содержащего приводной блок, блок определения данных о движении, набор потребителей и блок управления мощностью, предназначенный для управления набором потребителей, при котором блок определения данных о движении определяет данные кривых движения, а приводным блоком управляют на основе данных кривых движения.
Для моторных транспортных средств возникает обычно стремление максимально уменьшить энергопотребление. Для этого уже предлагались так называемые системы помощи водителю, которые выдают ему рекомендации по управлению движением. Для создания этих рекомендаций определяются так называемые кривые движения, которые являются результатом оптимизации энергопотребления приводным блоком при определенных краевых условиях в отношении профиля участка пути и времени движения.
Что касается энергопотребления побочными потребителями, то он управляется традиционным образом посредством блока управления мощностью, называемого также «менеджмент бортовой сети».
В основе изобретения лежит задача усовершенствования способа таким образом, чтобы можно было достичь оптимизации в отношении определенного критерия качества с учетом набора потребителей.
Для этого предложено, что блок управления мощностью принимает от набора потребителей данные о них, по меньшей мере, на основе данных о потребителях блок управления мощностью определяет прогнозируемые данные профиля нагрузки, в зависимости от данных профиля нагрузки на блок определения данных о движении передаются определяющие данные, и блок определения данных о движении определяет в зависимости от определяющих данных данные кривых движения. За счет этого при определении данных кривых движения можно учесть будущую потребность в мощности набора потребителей, причем по сравнению с традиционными системами помощи водителю можно достичь дальнейшей оптимизации критерия качества.
Оптимизируемым критерием качества является преимущественно общее энергопотребление транспортным средством. Однако он может быть образован другим параметром, например пиковой мощностью, дальностью перевозки, временем движения для данного участка пути или другим, представляющимся специалисту целесообразным параметром. Кроме того, критерий качества может быть образован комбинацией нескольких названных параметров.
Под «потребителем» следует понимать, по меньшей мере, один компонент для выполнения определенной функции потребления или совокупность компонентов, предусмотренных для выполнения определенной функции потребления во взаимодействии. «Набор потребителей» включает в себя, по меньшей мере, одного потребителя, преимущественно группу потребителей. Набору потребителей присвоена, по меньшей мере, одна функция потребления, преимущественно несколько функций потребления. Типичными функциями потребления являются – например и неисключительно – кондиционирование и/или вентиляция салона, создание сжатого воздуха или зарядка электрического энергоаккумулятора. Также на языке специалистов потребителя можно назвать «вспомогательным устройством» или по сравнению с приводным блоком – «побочным потребителем». У потребителей речь идет преимущественно об электрических компонентах. Однако изобретение применимо также к неэлектрическим потребителям, энергия к которым подводится приводным блоком механически или термически.
Для питания набора потребителей электроэнергией преимущественно предусмотрена так называемая бортовая сеть. Если приводной блок оснащен, по меньшей мере, одним электродвигателем и отбирает электроэнергию из промежуточного контура, то бортовая сеть питается электрической мощностью преимущественно посредством подключенного к промежуточному контуру силового блока питания, в частности в виде преобразовательного блока.
Процесс управления блоком управления мощностью, приданным набору потребителей, включает в себя целесообразно, по меньшей мере, определение мощности, имеющейся в распоряжении для набора потребителей или для соответствующей бортовой сети, и инициирование процессов управления набором потребителей таким образом, что эксплуатация набора потребителей согласована с этой мощностью. Если набор потребителей содержит группу потребителей, то эти инициированные блоком управления мощностью процессы управления служат для распределения имеющейся в распоряжении мощности по потребителям набора.
Под «кривой движения» следует понимать, в частности, характеристику динамического параметра транспортного средства в зависимости от параметра положения. Этот параметр положения служит для определения положения транспортного средства вдоль заранее известного и проезжаемого участка пути. Он может быть выполнен в виде локального параметра, например расстояния до начала или конца участка пути или километра или гектометра участка пути, или в виде времени. Динамическим параметром, нанесенным в зависимости от параметра положения, может быть ускорение или скорость транспортного средства, сила тяги или тормозная сила или тяговая или тормозная мощность. Кривая движения определяется преимущественно за счет указания последовательности эксплуатационных фаз. Возможными видами эксплуатации для эксплуатационной фазы являются, в частности, ускорение, устойчивое движение, инерционное движение, торможение и остановка. При этом фазу инерционного движения и фазу торможения можно объединить под термином «фаза замедления», на которой скорость транспортного средства уменьшается. Эксплуатационная фаза определяется, по меньшей мере, за счет указания вида эксплуатации и, по меньшей мере, одного значения параметра положения, причем указанное значение определяет, в частности, по меньшей мере, начало эксплуатационной фазы. Предпочтительно для эксплуатационной фазы можно указать интервал параметра положения, в частности продолжительность. Кроме того, фаза ускорения и фаза торможения могут дополнительно характеризоваться соответственно значением ускорения и тормозным действием, например в виде тормозной мощности или тормозной силы.
В основе определения данных кривых движения лежит целесообразно, по меньшей мере, один способ оптимизации. Эта оптимизация осуществляется при заданных краевых условиях, касающихся профиля участка пути и расписания. Поэтому данные участка пути и данные расписания выполнены предпочтительным образом в виде входных данных для способа оптимизации. Данные кривых пути, определяемые блоком определения данных о движении, являются преимущественно результатом оптимизации, по меньшей мере, энергопотребления приводным блоком.
Приводным блоком можно управлять на основе данных кривых движения за счет того, что они привлекаются управляющим устройством для автоматического управления или служат для создания выдаваемых машинисту рекомендаций по управлению движением. В последнем случае машинист вручную управляет приводным блоком с помощью созданных на основе данных кривых движения рекомендаций по управлению движением.
Под «профилем нагрузки» следует понимать, в частности, характеристику, по меньшей мере, одного параметра потребления в зависимости от параметра положения, преимущественно в зависимости от времени движения. Параметр потребления выполнен, в частности, в виде параметра мощности. «Прогнозируемыми» данными профиля нагрузки являются данные будущего профиля нагрузки, который относится к еще проезжаемому участку пути. Данные профиля нагрузки относятся преимущественно к общей потребности в мощности набора потребителей или соответствующей бортовой сети, причем также возможно определение данных профиля нагрузки для соответствующей потребности в мощности отдельных потребителей.
Согласно одному предпочтительному варианту, предложено, что переданные блоку определения данных о движении определяющие данные соответствуют данным профиля нагрузки, а блок определения данных о движении определяет данные кривых движения в зависимости от данных профиля нагрузки. В этом варианте определение данных кривых движения посредством блока определения данных о движении включает в себя их определение на основе данных профиля нагрузки. При этом полученные блоком управления мощностью прогнозируемые данные профиля нагрузки используются целесообразно в качестве входных данных способа оптимизации, осуществляемого блоком определения данных о движении.
В другом варианте предложено, что блок определения данных о движении определяет набор данных с альтернативными данными кривых движения, наборы данных передаются блоку управления мощностью, в зависимости от данных профиля нагрузки выбирается один из наборов данных, а определяющие данные являются характерными для выбранного набора данных. В этом варианте целесообразно на первом этапе определяются наборы данных, являющиеся результатом оптимизации энергопотребления приводным блоком. При этом объем функций блока управления мощностью включает в себя предпочтительным образом определение набора данных, приводящего к минимальной потребности в энергии для набора потребителей. Этой потребностью в энергии является преимущественно общая потребность в энергии набора потребителей. За счет этого с выбором подходящего набора данных можно оптимизировать общую потребность в энергии для тяги и набора потребителей или бортовой сети. Определяющие данные содержат целесообразно, по меньшей мере, один информационный контент, которого достаточно для определения используемого для управления приводным блоком набора данных блоком определения данных о движении.
Кроме того, предложено, что определяются наборы данных с альтернативными данными кривых движения для определенного проезжаемого участка пути при условии заданного времени движения. За счет этого может осуществляться оптимизация с соблюдением относящихся к расписанию краевых условий.
Согласно одному предпочтительному варианту, предложено, что при определении данных кривых движения блоком определения данных о движении определяются данные кривых замедления в зависимости от определяющих данных. Это подходит, в частности, для выполнения приводного блока, по меньшей мере, с одним режимом электроторможения, в котором в процессе торможения кинетическая энергия транспортного средства преобразуется в электрическую энергию, которая может использоваться для эксплуатации набора потребителей. В этой связи на различных эксплуатационных фазах фаза замедления оказывает существенное влияние на предоставленную в распоряжение для эксплуатации набора потребителей энергию, т.к. на этой фазе приводной блок не отбирает никакую электрическую энергию или кинетическая энергия не преобразуется в электрическую энергию. Однако генераторное торможение характеризуется в большинстве случаев тем, что приводной блок в течение короткой продолжительности времени отдает высокую мощность. Если же в питающей сети отсутствует или имеется лишь ограниченная возможность обратного питания, а энергию торможения в транспортном средстве нельзя использовать или временно накопить, она должна быть преобразована в тепло. Поэтому особое преимущество возникает в том случае, если данные профиля нагрузки блока управлением мощностью учитываются при определении данных кривых замедления, в частности данных кривых торможения, а фаза замедления, в частности фаза торможения транспортного средства, оптимизируется за счет этого в отношении энергопотребления набором потребителей.
Если, как описано выше, определяются наборы данных с альтернативными данными кривых движения, то в этой связи предложено, что данные кривых движения наборов данных отличаются друг от друга данными кривых замедления. В частности, оптимизацию вычислительной мощности при определении данных кривых движения можно достичь в том случае, если определение альтернативных данных кривых движения направлено на фазу замедления, в частности фазу торможения транспортного средства. В одном особом варианте альтернативные данные кривых движения могут отличаться друг от друга исключительно данными кривых замедления.
В качестве альтернативы или дополнительно при определении данных кривых движения блоком определения данных о движении могут определяться данные кривых ускорения в зависимости от определяющих данных. Это предпочтительно, в частности, в варианте, в котором оптимизируемый критерий качества включает в себя, по меньшей мере, пиковую мощность транспортного средства.
Кроме того, предложено, что на основе данных кривых замедления можно управлять, по меньшей мере, одной из следующих эксплуатационных фаз: фаза движения накатом, фаза торможения в соответствии с первой ступенью тормозного действия и фаза торможения в соответствии, по меньшей мере, с одной второй ступенью тормозного действия. При этом параметром тормозного действия может быть тормозная сила или тормозная мощность. Ступень тормозного действия может соответствовать ступени, которая обычно настраивается машинистом посредством элемента управления.
Согласно одному предпочтительному варианту, предложено, что набор потребителей содержит, по меньшей мере, один зарядный блок для зарядки энергоаккумулятора транспортного средства, причем блок управления мощностью принимает от энергоаккумулятора данные об энергетическом состоянии и, по меньшей мере, на основе данных о потребителях и данных об энергетическом состоянии определяет прогнозируемые данные профиля нагрузки. За счет этого профиль нагрузки, учитываемый при определении данных кривых движения, может учитывать имеющуюся в распоряжении в энергоаккумуляторе энергию. В зависимости от зарядного состояния энергоаккумулятора можно учитывать возможности отбора энергии из него или подачу энергии в него посредством зарядного блока при определении профиля нагрузки.
Выявленные блоком управления мощностью данные профиля нагрузки могут быть отнесены к предположительному потреблению набором потребителей, которое может отличаться от фактического потребления. Однако предпочтителен вариант, в котором данными профиля нагрузки являются данные преследуемого профиля нагрузки набора потребителей. Для этого предложено, что управление набором потребителей осуществляется в соответствии с данными профиля нагрузки.
Изобретение предназначено, в частности, для транспортных средств, для которых характеристику поездки можно предвидеть в течение больших промежутков времени в виде кривой движения. Под ними следует понимать, в частности, промежутки времени свыше одной минуты, в частности свыше пяти минут, и особенно предпочтительно свыше десяти минут. Поэтому предложенный способ может применяться предпочтительно в уличных транспортных средствах, которые в течение промежутка времени используют мало проезжаемый другими транспортными средствами или собственный зарезервированный участок пути. Особенно предпочтительным является применение в уличных транспортных средствах, в частности в местном или междугородном сообщении при перевозке пассажиров или грузовых перевозках.
Кроме того, изобретение исходит из транспортного средства, содержащего приводной блок, блок определения данных о движении, предусмотренный для определения данных кривых движения, набор потребителей и блок управления мощностью, предусмотренный для управления набором потребителей, причем приводной блок выполнен с возможностью управления на основе данных кривых движения.
Предложено, что блок управления мощностью соединен с набором потребителей с точки зрения техники передачи данных и предназначен для определения прогнозируемых данных профиля нагрузки, по меньшей мере, на основе данных о потребителях набора потребителей, предусмотрено соединение между блоком управления мощностью и блоком определения данных о движении, причем посредством указанного соединения в зависимости от данных профиля нагрузки на блок определения данных о движении передаются определяющие данные, и блок определения данных о движении предназначен для определения данных кривых движения в зависимости от определяющих данных. Предложенная передача данных от блока управления мощностью к блоку определения данных о движении может учитываться предпочтительно при определении данных кривых движения, причем по сравнению с традиционными системами помощи водителю может быть достигнута дальнейшая оптимизация критерия качества. В отношении других предпочтительных эффектов предложенного транспортного средства следует сослаться на приведенное выше описание предложенного способа.
Примеры осуществления изобретения более подробно поясняются со ссылкой на чертежи, на которых представлено:
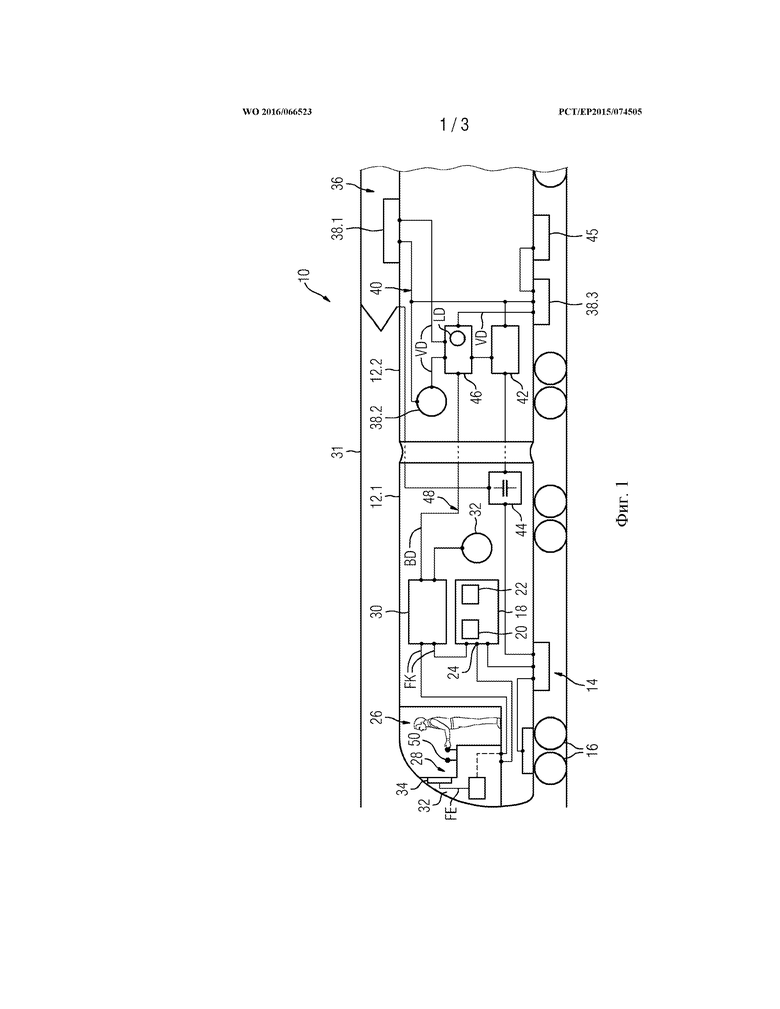
фиг. 1 - рельсовое транспортное средство с блоком определения данных о движении для определения данных кривых движения, набором потребителей и блоком управления мощностью;
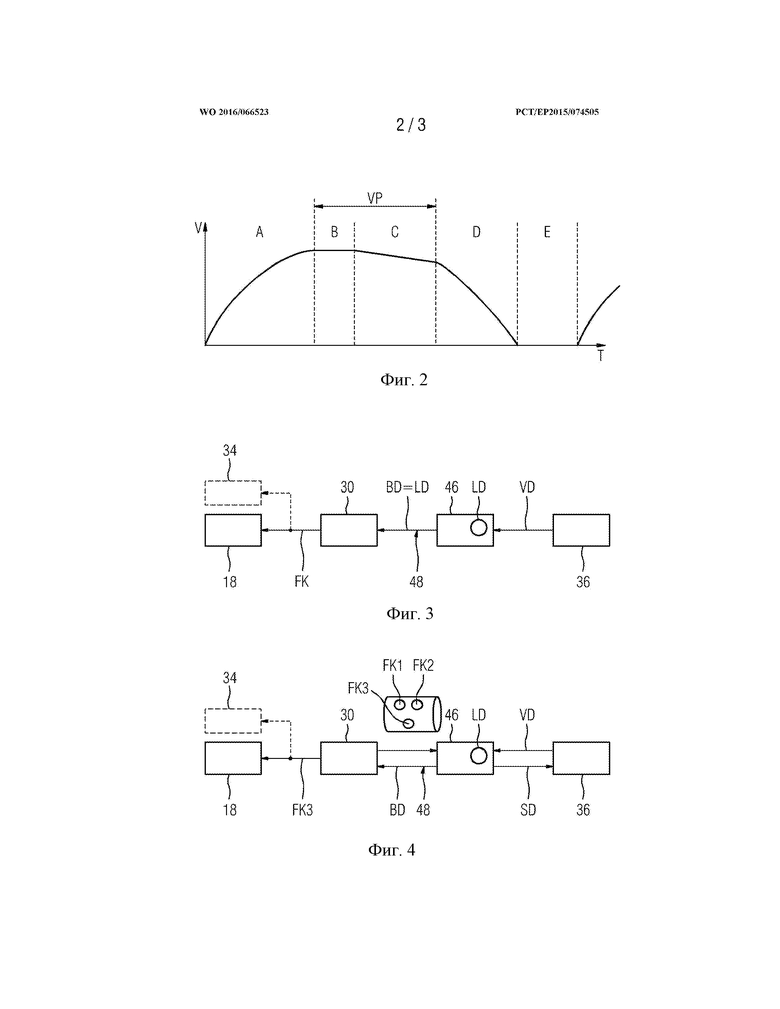
фиг. 2 - пример кривой движения;
фиг. 3 - определение данных кривых движения на основе данных профиля нагрузки блока управления мощностью;
фиг. 4 - определение альтернативных данных кривых движения и выбор альтернативы на основе данных профиля нагрузки;
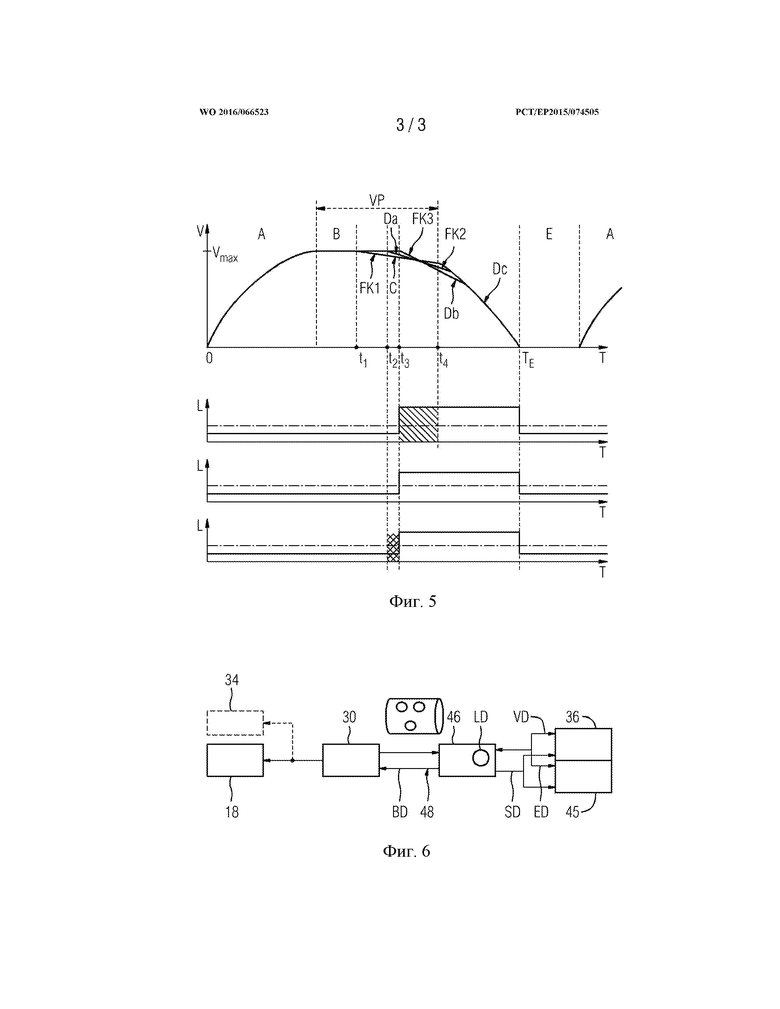
фиг. 5 - соответствующие альтернативным данным кривых движения кривые движения по сравнению с профилем нагрузки набора потребителей;
фиг. 6 - определение данных кривых движения на основе данных профиля нагрузки блока управления мощностью, который учитывает данные энергетического состояния энергоаккумулятора.
На фиг. 1 в схематичном виде сбоку показано выполненное в виде рельсового транспортного средства 10 транспортное средство. Оно выполнено в виде состава вагонов 12, который на языке специалистов называется «моторвагонным поездом». Состав оборудован приводным блоком 14, включающим в себя тяговые электродвигатели (не показаны), которые служат каждый для привода, по меньшей мере, одной ведущей оси 16. Число вагонов, а также последовательность ведущих и бегунковых осей показаны в качестве примера. В рассматриваемом варианте рельсовое транспортное средство 10 образует эксплуатационно-нераздельную поездную единицу, которая может эксплуатироваться, по меньшей мере, с одним родовым рельсовым транспортным средством в сцепленном режиме, причем компоненты приводного блока 14 распределены по всему составу. Предпочтительно, чтобы состав содержал отделяемые друг от друга тяговые вагоны, в каждом из которых расположен автономный приводной блок 14, и неприводные вагоны и мог составляться по необходимости. Кроме того, предпочтительно, чтобы рельсовое транспортное средство 10 было выполнено в виде локомотива.
Приводной блок 14 может эксплуатироваться в тяговом режиме и режиме электроторможения. Для этого предусмотрено управляющее устройство 18, содержащее прибор 20 управления приводом и прибор 22 управления торможением. Управляющее устройство 18 содержит интерфейс 24 к расположенному в кабине 26 устройству 28 ввода. Оно содержит известным образом элементы 50 управления, размещенные на так называемом пульте 32 управления. С помощью этих элементов 50 управления можно вводить для приводного блока 14 команды, такие как нужная тяговая ступень или нужная ступень тормозного действия, которые реализуются соответствующими приборами 20, 22 управления управляющего устройства 18.
Кроме того, рельсовое транспортное средство 10 содержит блок 30 определения данных о движении, которое предназначено для определения данных FK кривых движения. Блок 30 определения данных о движении называется на языке специалистов также «система помощи водителю». В основе функционирования блока 30 определения данных о движении лежит, по меньшей мере, один способ оптимизации, который служит для минимизации энергии, отбираемой во время поездки из внешней питающей сети 31. Эта оптимизация происходит при заданных краевых условиях, относящихся, по меньшей мере, к одной, заранее известной топологии участка пути и расписанию. Соответствующие данные, привлекаемые блоком 30 определения данных о движении для осуществления способа оптимизации, хранятся в базе 32 данных. В рассматриваемом варианте база 32 данных расположена на борту рельсового транспортного средства 10, причем возможно также расположение, по меньшей мере, части базы данных вне рельсового транспортного средства 10. Блок 30 определения данных о движении, по меньшей мере, на основе этих данных определяет данные FK кривых движения. Эти данные FK кривых движения соответствуют данным профиля нанесенной в зависимости от времени Т скорости V транспортного средства, причем профиль разделен на разные эксплуатационные фазы. При этом возможными эксплуатационными фазами являются: фаза А ускорения, фаза В устойчивого движения, фаза С качения, фаза D торможения и фаза Е стояния. Эксплуатационные фазы «фаза качения» С и «фаза торможения» D относятся к вышестоящей «фазе замедления» VP. Кроме того, эксплуатационные фазы «фаза ускорения» и «фаза торможения» могут быть разделены на дальнейшие эксплуатационные фазы, относящиеся соответственно к тяговому действию и тормозному действию. Это более подробно поясняется ниже.
Пример такого профиля изображен на фиг. 2. В качестве альтернативы или дополнительно на основе данных FK кривых движения можно образовать профиль скорости V транспортного средства в зависимости от места или положения транспортного средства.
Данные FK кривых движения, определяемые блоком 30 определения данных о движении, служат для управления приводным блоком 14. Согласно первому режиму управления, на основе данных FK кривых движения создаются рекомендации FE по управлению движением, которые выдаются машинисту посредством блока 34 выдачи. В одном типичном варианте блок 34 выдачи выполнен в виде блока отображения, причем возможна подача альтернативного или дополнительного акустического сигнала. Посредством элементов 50 управления машинист с помощью рекомендаций по управлению движением может вручную вводить команды, реализуемые управляющим устройством 18. Во втором режиме управления на основе данных FK кривых движения создаются команды для приводного блока 14, которые автоматически реализуются управляющим устройством 18. Для этого блок 30 определения данных о движении и управляющее устройство 18 соединены между собой с точки зрения техники передачи данных.
Кроме того, рельсовое транспортное средство 10 содержит набор 36 электрических потребителей 38. Они отличаются от компонентов приводного блока 14 и называются также «побочными потребителями» или «вспомогательными устройствами», которые подключены к так называемой, сильно схематично изображенной на фиг. 1 бортовой сети 40. Эта бортовая сеть 40 обычно посредством силового блока 42 питания питается мощностью из промежуточного контура 44, к которому подключен приводной блок 14. Силовой блок 42 питания обычно оборудован, по меньшей мере, одним вентильным преобразователем, который называется также «вентильным преобразователем бортовой сети» или «вентильным преобразователем «вспомогательных устройств».
На фиг. 1 в качестве примера представлены электрические потребители 38.1, 38.2, 38.3 набора 36, выполненные соответственно в виде установки кондиционирования, вентиляционного блока и зарядного блока энергоаккумулятора 45. Для управления набором 36 потребителей с точки зрения силовой техники предусмотрен блок 46 управления мощностью. Он служит для того, чтобы рассчитывать имеющуюся в распоряжении для эксплуатации набора 36 потребителей общую мощность, называемую также общей «мощностью бортовой сети», и распределять мощность, максимум эту общую мощность, по электрическим потребителям 38. Для этого блок 46 управления мощностью находится в соединении с точки зрения передачи данных с электрическими потребителями 38, причем он через это соединение принимает данные VD об электрических потребителях 38. Эти данные VD о потребителях служат для того, чтобы охарактеризовать потребность в мощности соответствующего электрического потребителя 38. Управление с точки зрения силовой техники может включать в себя помимо этой регистрации данных формирование команд для управления электрическими потребителями 38, реализуемых соответствующим устройством управления потребителями. В рассматриваемом варианте блок 46 управления мощностью выполнен в виде центрального блока в рельсовом транспортном средстве 10, который соединен с локальными устройствами управления потребителями (не показаны). Эти локальные устройства управления потребителями приданы разным потребителям 38 или вышестоящей группе потребителей 38, например электрическим потребителям 38 вагона 12. Кроме того, согласно другому варианту, устройства управления потребителями могут эксплуатироваться в соотношении ведущий-ведомый, причем описанная выше функция блока 46 управления мощностью осуществляется одним из устройств управления потребителями.
Кроме того, блок 46 управления мощностью предназначен для расчета прогнозируемого профиля нагрузки на основе данных VD о потребителях. Для этого блок 46 управления мощностью заранее рассчитывает потребность в мощности потребителей 38, по меньшей мере, для одного интервала времени. При этом используется полученное на основе данных VD о потребителях знание о том, какие потребители 38 с какой ожидаемой мощностью в данный интервал времени продолжительно подключены или отключены, случайно переключаются или управляемым образом могут быть включены или выключены. Следовательно, по данным VD о потребителях можно с помощью блока 46 управления мощностью определить данные LD профиля нагрузки, посредством которых профиль нагрузки создается в виде нанесенной в зависимости от времени кривой мощности для будущего интервала времени.
В режиме электроторможения тяговые двигатели приводного блока 14 известным образом используются в качестве генераторов, которые подают электрическую энергию в промежуточный контур 44. Поэтому режим движения, в частности различные эксплуатационные фазы рельсового транспортного средства 10, влияют на энергию, имеющуюся в распоряжении для эксплуатации набора 36 потребителей. Предпочтительным образом предусмотрено соединение 48 между блоком 46 управления мощностью и блоком 30 определения данных о движении, через которое при эксплуатации создан поток данных от блока 46 управления мощностью к блоку 30 определения данных о движении. Соединение 48 изображено на фиг. 1 схематично. Речь может идти о непосредственном физическом соединении или логическом соединении, которое создается через шину данных (не показана). Поток данных может осуществляться непосредственно между блоком 46 управления мощностью и блоком 30 определения данных о движении или через дополнительные промежуточные блоки.
Это соединение 48 служит для передачи определяющих данных ВD, полученных на основе данных LD профиля нагрузки, на блок 30 определения данных о движении. Эти определяющие данные ВD привлекаются блоком 30 определения данных о движении для определения данных FK кривых движения. С помощью фиг. 3-5 описаны два примера, причем для каждого примера поясняются вид определяющих данных ВD и определение данных FK кривых движения блоком 30 определения данных о движении.
Первый пример представлен на фиг. 3. Как описано выше, блок 46 управления мощностью принимает данные VD о потребителях набора 36, причем он на их основе определяет прогнозируемые данные LD профиля нагрузки. В рассматриваемом варианте эти данные LD профиля нагрузки образуют определяющие данные ВD, которые через соединение 48 передаются на блок 30 определения данных о движении. За счет этого на блок 30 определения данных о движении передается информация о будущем профиле нагрузки набора 36 потребителей. Способ оптимизации блока 30 определения данных о движении определяет тогда данные FK кривых движения на основе данных LD профиля нагрузки. Этим учитывается характеристика потребности в мощности набора 36 потребителей при определении оптимальной кривой движения. В частности, одна или несколько фаз D торможения определяются таким образом, что максимум потребности в мощности набора 36 потребителей покрывается энергией, выработанной в режиме электроторможения приводного блока 14. Если, например, для определенного промежутка времени предусмотрена повышенная потребность в мощности, то фаза D электроторможения осуществляется предпочтительно в этот промежуток времени и с соответствующим тормозным действием. Блок 30 определения данных о движении определяет данные FK кривых движения на фазе их определения, которая учитывает это. Данные FK кривых движения подаются на управляющее устройство 18 для автоматического управления приводным блоком или обрабатываются для блока 34 выдачи рекомендаций по управлению движением.
Второй пример поясняется с помощью фиг. 4 и 5. Он отличается от предыдущего примера тем, что блок 30 определения данных о движении определяет наборы данных с альтернативными данными FK1, FK2, FK3 кривых движения. Соответствующие кривые движения изображены на фиг. 5 на верхней диаграмме. Данные FK1, FK2, FK3 кривых движения отличаются своей соответствующей фазой VP замедления, на которой скорость V транспортного средства уменьшается. В случае первой, основанной на данных FK1 кривой движения в момент t1 начинается фаза С выкатывания. В случае второй, основанной на данных FK2 кривой движения фаза В устойчивого состояния движения поддерживается с постоянной скоростью Vmax до более позднего момента t2, в который начинается фаза Da торможения с первым тормозным действием. В случае третьей, основанной на данных FK3 кривой движения фаза В устойчивого состояния движения поддерживается с постоянной скоростью Vmax до еще более позднего момента t3, в который начинается фаза Db торможения со вторым тормозным действием. Второе тормозное действие больше первого тормозного действия.
Фаза С выкатывания в соответствии с данными FK1 кривой движения происходит до момента t4 после момента t3 и переходит в фазу Dc торможения с третьим тормозным действием, которое больше второго тормозного действия.
Как видно также на верхней диаграмме на фиг. 5, наборы данных с альтернативными данными FK1, FK2, FK3 кривых движения, в частности альтернативные фазы VP замедления, определяются для определенного проезжаемого участка пути при условии заданного времени ТЕ движения.
Как показано на фиг. 4, наборы данных с альтернативными данными FK1, FK2, FK3 кривых движения передаются через соединение 48 на блок 46 управления мощностью. Как уже упомянуто выше, он определяет прогнозируемые данные LD профиля нагрузки на основе данных VD о потребителях. Возникающий на основе данных LD профиль нагрузки набора 36 потребителей изображен на нижних диаграммах на фиг. 5. На них в зависимости от времени Т нанесена соответствующая, отбираемая набором 36 потребителей мощность L. Профиль нагрузки отличается заранее рассчитанным возрастанием мощности L в момент t3 до момента остановки. Блок 46 управления мощностью определяет, какие из данных FK1, FK2, FK3 кривых движения имеют наивысшую степень согласования с профилем нагрузки.
В случае первых данных FK1 кривой движения фаза С выкатывания длится от момента t1 до момента t4, в который происходит переход на фазу Dc торможения. Следовательно, выработанная из уменьшения кинетической энергии электрическая энергия может использоваться для эксплуатации набора 36 потребителей только с момента t4. В промежуток времени между t3 и t4 электрическая мощность должна отбираться из другого источника, например энергоаккумулятора и/или питающей сети 31. Эта мощность изображена заштрихованной на первой из средних диаграмм.
В случае вторых данных FK2 кривой движения в момент t2 до момента t3 начинается фаза Da торможения. Поскольку в момент t2 потребность в энергии набора 36 потребителей мала, часть выработанной генератором тормозной энергии должна быть уменьшена в тормозном сопротивлении, если обратное питание в сеть невозможно. Это обозначено заштрихованной областью на нижней диаграмме на фиг. 5.
В случае третьих данных FK3 кривой движения начинается фаза Db торможения в момент t3, в который потребность в энергии набора 36 потребителей возрастает. Данные FK3 кривой движения выбираются блоком 46 управления мощностью как оптимальные. Об этом выборе сообщается блоку 30 определения данных о движении за счет передачи на него определяющих данных BD. Этих определяющих данных достаточно для того, чтобы блок 30 определения данных о движении на основе определяющих данных BD мог определить выбранный набор данных. В одном простом варианте выбранный набор данных характеризуется кодом, который в виде определяющих данных BD передается для определения блоком 30 определения данных о движении на него. В одном варианте выбранный набор данных может передаваться на блок 30 определения данных о движении, по меньшей мере, частично в виде определяющих данных BD.
Как описано выше, данные FK кривых движения передаются на управляющее устройство 18 для автоматического управления приводным блоком 14 или обрабатываются для приводного блока 14 для выдачи рекомендаций по управлению движением.
Как показано на фиг. 4, происходит также управление набором 36 потребителей блоком 46 управления мощностью. При этом формируются управляющие данные SD, которые передаются на соответствующие устройства управления потребителями. Соответствующие управляющие команды определяются таким образом, что управление набором 36 потребителей происходит максимально в соответствии с полученным прогнозируемым профилем нагрузки.
Другой вариант показан на фиг. 6. Он отличается от описанных вариантов тем, что блок 46 управления мощностью принимает данные ED энергетического состояния энергоаккумулятора 45 и учитывает их при определении данных LD профиля нагрузки.
Изобретение относится к транспортным средствам и может применяться для управления приводным блоком. Предложенный способ эксплуатации транспортного средства заключается в том, что блок управления мощностью управляет набором потребителей, блок определения данных кривых о движении определяет данные кривых движения, приводным блоком управляют на основе данных кривых движения. Блок управления мощностью принимает от набора потребителей данные о них, по меньшей мере на основе данных о потребителях блок управления мощностью определяет прогнозируемые данные профиля нагрузки, в зависимости от данных профиля нагрузки на блок определения данных о движении передаются определяющие данные, и блок определения данных о движении определяет в зависимости от определяющих данных данные кривых движения. Транспортное средство содержит блок определения данных кривых движения, набор потребителей, приводной блок, выполненный с возможностью управления на основе данных кривых движения. Блок управления мощностью соединен с набором потребителей для передачи данных и предназначен, чтобы на основе данных о потребителях набора потребителей определять прогнозируемые данные профиля нагрузки. Блок кривых движения предназначен для определения данных кривых движения в зависимости от определяющих данных. Техническим результатом является оптимизация общей потребности в энергии для тяги и набора потребителей или бортовой сети. 2 н. и 10 з.п. ф-лы, 6 ил.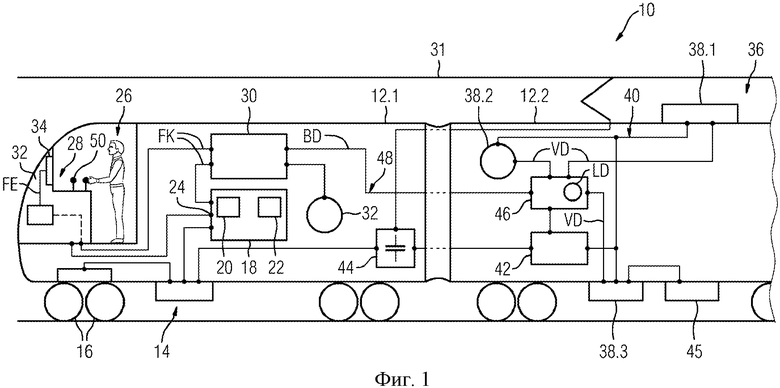
1. Способ эксплуатации транспортного средства, содержащего приводной блок (14), блок (30) определения данных о движении, набор (36) потребителей и блок (46) управления мощностью, предназначенный для управления набором (36) потребителей, при котором
- блок (30) определения данных о движении определяет данные (FK; FK3) кривых движения, а приводным блоком (14) управляют на основе данных (FK; FK3) кривых движения,
отличающийся тем, что
- блок (46) управления мощностью принимает от набора (36) потребителей данные (VD) о них,
- по меньшей мере на основе данных (VD) о потребителях блок (46) управления мощностью определяет прогнозируемые данные (LD) профиля нагрузки,
- в зависимости от данных (LD) профиля нагрузки на блок (30) определения данных о движении передают определяющие данные (BD),
- блок (30) определения данных о движении определяет в зависимости от определяющих данных (BD) данные (FK; FK3) кривых движения.
2. Способ по п. 1, отличающийся тем, что переданные на блок (30) определения данных о движении определяющие данные (BD) соответствуют данным (LD) профиля нагрузки, а блок (30) определения данных о движении определяет данные (FK) кривых движения в зависимости от данных (LD) профиля нагрузки.
3. Способ по п. 1, отличающийся тем, что
- посредством блока (30) определения данных о движении определяют наборы данных с альтернативными данными (FK1, FK2, FK3) кривых движения,
- наборы данных передают на блок (46) управления мощностью,
- в зависимости от данных (LD) профиля нагрузки выбирают один из наборов данных и
- определяющие данные (BD) являются характерными для выбранного набора данных.
4. Способ по п. 3, отличающийся тем, что определяют наборы данных с альтернативными данными (FK1, FK2, FK3) кривых движения для определенного проезжаемого участка пути при условии заданного времени (ТЕ) движения.
5. Способ по любому из пп. 1-4, отличающийся тем, что при определении данных (FK; FK3) кривых движения посредством блока (30) определения данных о движении определяют данные кривых замедления в зависимости от определяющих данных (BD).
6. Способ по п. 3 или 5, отличающийся тем, что данные (FK1, FK2, FK3) кривых движения наборов данных отличаются друг от друга по меньшей мере данными кривых замедления.
7. Способ по п. 5 или 6, отличающийся тем, что на основе данных кривых замедления управляют по меньшей мере одной из следующих эксплуатационных фаз: фазой (С) выкатывания, фазой (Da) торможения в соответствии с первой ступенью тормозного действия и фазами (Db, Dc) торможения в соответствии со второй ступенью тормозного действия.
8. Способ по любому из пп. 1-7, отличающийся тем, что набор (36) потребителей содержит по меньшей мере один зарядный блок (38.3) для зарядки энергоаккумулятора (45) транспортного средства, причем блок (46) управления мощностью принимает от энергоаккумулятора (45) данные (ED) об энергетическом состоянии и по меньшей мере на основе данных (VD) о потребителях и данных (ED) об энергетическом состоянии определяет прогнозируемые данные (LD) профиля нагрузки.
9. Способ по любому из пп. 1-8, отличающийся тем, что набором (36) потребителей управляют в соответствии с данными (LD) профиля нагрузки.
10. Способ по любому из пп. 1-9, отличающийся тем, что транспортное средство выполнено в виде рельсового транспортного средства (10).
11. Транспортное средство, содержащее приводной блок (14), блок (30) определения данных о движении, предназначенный для определения данных (FK; FK3) кривых движения, набор (36) потребителей и блок (46) управления мощностью, предназначенный для управления набором (36) потребителей, причем приводной блок (14) выполнен с возможностью управления на основе данных (FK; FK3) кривых движения,
отличающееся тем, что
- блок (46) управления мощностью соединен с набором (36) потребителей для передачи данных и предназначен для того, чтобы по меньшей мере на основе данных (VD) о потребителях набора (36) потребителей определять прогнозируемые данные (LD) профиля нагрузки, причем
- блок (30) определения данных о движении предназначен для определения данных (FK; FK3) кривых движения в зависимости от определяющих данных (BD).
12. Транспортное средство по п. 11, отличающееся тем, что оно выполнено в виде рельсового транспортного средства (10).
| US 20120316717 A1, 13.12.2012 | |||
| EP 1897745 A2, 12.03.2008 | |||
| DE 102009023704 A1, 28.10.2010 | |||
| WO 2008073547 A2, 19.06.2008. |

