Изобретение касается способа управления приводом рельсового транспортного средства, которое имеет привод с несколькими приводными блоками, в котором эти приводные блоки подключают к приводу или отключают от него, так что сумма приводных (тяговых) усилий приводных блоков больше, чем требуемая сила тяги.
Кроме того, изобретение касается рельсового транспортного средства с имеющим, по меньшей мере, два приводных блока приводом и соединенным с приводом управляющим блоком, который предназначен для включения и отключения приводных блоков.
Такой способ и такое рельсовое транспортное средства широко известны из уровня техники. Так, в частности, в приводах грузовых железных дорог известны двухсекционные локомотивы (также называемые как сочлененные или сдвоенные локомотивы), в которых необходимое приводное усилие предоставляется двумя частичными локомотивами или другими словами приводными узлами. Если необходима высокая сила тяги, например, в случае тяжелой нагрузки и отчасти крутого подъема пути следования, то оба частичных локомотива остаются постоянно включенными, даже если высокая сила тяги требуется только на коротком участке всего пути следования. Следовательно, известному способу и известному рельсовому транспортному средству свойственен тот недостаток, что за счет эксплуатации обоих частичных локомотивов возникает высокое потребление энергии, которое влечет за собой высокие эксплуатационные затраты.
Поэтому задача изобретения состоит в предоставлении способа, а также рельсового транспортного средства названного в начале вида, так что может снижаться потребление энергии.
Изобретение решает эту задачу за счет того, что требуемая сила тяги для участков (перегонов) пути следования рассчитывается в зависимости от пути следования и количество включенных приводных блоков изменяется во время движения и подгоняется (приспосабливается) к соответственно требуемой силе тяги.
Исходя из названного в начале рельсового транспортного средства изобретение решает указанную задачу за счет того, что управляющий блок имеет средства для предоставления требуемой силы тяги для определенных участков (перегонов) пути следования, причем управляющий блок изменяет количество приводных блоков во время движения и отключает приводные блоки, пока сумма приводного усилия включенных приводных блоков больше, чем требуемая сила тяги на соответствующем участке пути.
В соответствии с изобретением предлагается безвредное для окружающей среды (экологичное) рельсовое транспортное средство с двойной или многократной тягой. Для этого рельсовое транспортное средство имеет, по меньшей мере, два приводных блока, которые в соответствии с изобретением могут включаться и отключаться во время движения, так что количество находящихся в работе приводных блоков может изменяться. Включение и отключение приводных блоков осуществляется таким образом, что возникает максимально незначительное потребление энергии. Изобретение базируется на идее, что принципиально применяемая многократная тяга должна осуществляться только тогда, когда это обязательно необходимо ввиду требующейся силы тяги. Необходимая сила тяги, с одной стороны, зависит от продольного профиля пути, а также от степени нагрузки рельсового транспортного средства и может определяться с помощью известных специалистам методов, например посредством моделирования. Моделирование требует в качестве входной величины, например, продольный профиль пути, а также степень нагрузки рельсового транспортного средства, температуру и тому подобное. В соответствующем изобретению рельсовом транспортном средстве предусмотрены средства для предоставления требуемой силы тяги. Эти средства обращаются к определенным данным о силе тяги в зависимости от места нахождения, так что в распоряжении рельсового транспортного средства для соответствующей путевой точки имеется необходимая в этом месте сила тяги. Если в рамках изобретения установлено, что требуемая сила тяги на некотором участке пути, может предоставляться только от одного приводного блока, то не требующиеся приводные блоки могут отключаться. Таким образом, потребление энергии рельсовым транспортным средством сокращается также, прежде всего, за счет исключения части вспомогательной эксплуатационной энергии. Тем самым также сокращаются эксплуатационные расходы рельсового транспортного средства. Более того, отключенные приводные блоки менее сильно нагружаются.
Согласно одному предпочтительному варианту осуществления изобретения требуемая сила тяги, разрешенная для места нахождения, рассчитывается перед началом движения. На основании достаточно точно известного пути следования и внешних граничных условий движения (езды), в частности, продольного профиля пути, предварительно возможен такой расчет силы тяги. В качестве результата этого расчета предварительно получают требуемую силу тяги в зависимости от определенной путевой точки. При этом совершенно не является необходимым осуществление расчета в самом рельсовом транспортном средстве. Расчет может также быть осуществлен за пределами рельсового транспортного средства во внешнем месте, например, на посту управления, причем результаты расчета затем могут передаваться на рельсовое транспортное средство, например, посредством радиопередачи, WLAN (беспроводная локальная сеть) или тому подобного. Рельсовое транспортное средство принимает передаваемые данные и запоминает их, так что обеспечивается возможность любого целесообразного доступа (обращения) к данным во время движения (езды).
Предпочтительным образом, количество включенных приводных блоков изменяется на определенных путевых точках пути следования. Точки пути маркируются, например, со стороны полотна железной дороги, так что включение и отключение приводных блоков может осуществляться машинистом вручную. В отличие от этого, в упомянутых точках пути расположены электрические или индуктивные маркировки в виде бализ или тому подобного, так что рельсовое транспортное средство автоматически и без участия машиниста может контролировать достижение путевой точки. Также в рамках изобретения возможно использование поддерживаемых спутниками методов определения положения, как например, GPS или тому подобного. Далее, предпочтительно, если для каждой путевой точки рассчитывается требуемая сила тяги, а затем включается, по меньшей мере, столько приводных блоков, чтобы сумма приводных усилий включенных приводных блоков была больше, чем требуемая сила тяги. Посредством этого усовершенствования в каждой путевой точке снова гарантировано, что всегда предоставлена достаточно большая сила тяги, так что рельсовое транспортное средство в любом случае может продолжать свое движение.
Согласно целесообразному относительно этого усовершенствованию в определенных путевых точках определяется соответствующая рабочая точка рельсового транспортного средства и для этой определенной рабочей точки и для каждого количества включенных приводных блоков рассчитывают коэффициент полезного действия, причем определенные этим образом коэффициенты полезного действия сравниваются друг с другом для получения оптимального коэффициента полезного действия, а затем включается столько приводных блоков, что их количество соответствует количеству приводных блоков, которые сочетаются с оптимальным коэффициентом полезного действия. Согласно этому предпочтительному варианту осуществления изобретения из соображений оптимального потребления энергии на определенном участке пути включается больше приводных блоков, чем это необходимо, чтобы предоставить требуемую силу тяги. Это базируется на том знании, что коэффициент полезного действия привода может быть более благоприятным, если включено больше приводных блоков, чем требуется. Под "коэффициентом полезного действия" здесь следует понимать долю полученной приводной энергии относительно затраченной электрической энергии. Коэффициент полезного действия привода зависит от различных влияющих параметров. Так, например, компоненты приводных блоков, как например главный трансформатор, выпрямители переменного тока, тяговые электродвигатели, редукторы и тому подобное, в различных приводах имеют различные коэффициенты полезного действия. Коэффициент полезного действия тягового электродвигателя варьируется, например, с помощью скорости рельсового транспортного средства. Следовательно, сначала, перед тем как может быть определен этот коэффициент полезного действия, следует определить рабочую точку рельсового транспортного средства. Рабочая точка описывает состояние рельсового транспортного средства. Это состояние описывается посредством скорости транспортного средства, внешней температуры, крутизны пути следования, количества вагонов рельсового транспортного средства, а также их загрузки, выбранной вентиляции, трения и тому подобного. С помощью этих данных устанавливается рабочая точка. Коэффициенты полезного действия отдельных приводных компонентов сохраняются в табличном виде для определенных областей. Общий коэффициент полезного действия соответствующего приводного блока складывается из этих отдельных коэффициентов полезного действия его компонентов и может рассчитываться посредством простого перемножения.
Целесообразным образом, соответствующие рабочие точки и согласованные с этими рабочими точками коэффициенты полезного действия рассчитываются перед началом движения рельсового транспортного средства.
Расчет может осуществляться, например, с помощью электронного вычислительного блока.
Целесообразным образом, коэффициенты полезного действия для путевых точек пути следования определяются с помощью метода моделирования. Моделирование требует - как уже выше описывалось - необходимых для определения рабочей точки входных данных, то есть продольного профиля пути, разрешенных максимальных скоростей, температуры, количества вагонов, загрузочного веса и тому подобного. Затем, движение рельсового транспортного средства моделируется, например, для эксплуатации с одним приводным блоком, причем моделирование в качестве результата предоставляет коэффициенты полезного действия в зависимости от прохождения пути. Затем моделирование повторяется, например, с двумя приводными блоками. Таким образом, коэффициенты полезного действия известны в зависимости от места.
Согласно целесообразному относительного этого усовершенствованию определяют коэффициенты полезного действия как относительно возможности возврата энергии (рекуперации) в режиме торможения, так и относительно создаваемой приводной энергии. Это предпочтительное усовершенствование изобретения базируется на той идее, что более высокое количество включенных приводных блоков также может быть целесообразным тогда, когда таким образом больше энергии может быть возвращено в сеть энергоснабжения.
Целесообразным образом приводные блоки представляют собой соответственно частичный локомотив, причем, например, два частичных локомотива выполнены в виде двухсекционного (т.е. сочлененного) локомотива и при этом каждый из них соответственно представляет собой один приводной блок.
В отличие от этого приводные блоки представляют собой электроприводы ходовой тележки. Такие приводные блоки наряду с собственно тяговым электродвигателем также включают в себя преобразователь частоты переменного тока, редукторы и тому подобное. Однако, такие приводные блоки известны специалисту, так что в этом месте не требуется на этом более подробно останавливаться.
Согласно одному усовершенствованию соответствующего изобретению рельсового транспортного средства предусмотрены средства для определения коэффициентов полезного действия привода в зависимости от количества включенных приводных блоков, причем управляющий блок предназначен для включения такого количества приводных блоков, что предоставляется максимальный коэффициент полезного действия привода.
В дальнейшем описываются другие преимущества изобретения на основе примера осуществления соответствующего изобретению способа и соответствующего изобретению рельсового транспортного средства со ссылкой на чертежи, причем одинаковые ссылочные позиции указывают на одинаково действующие компоненты. При этом на чертежах показано:
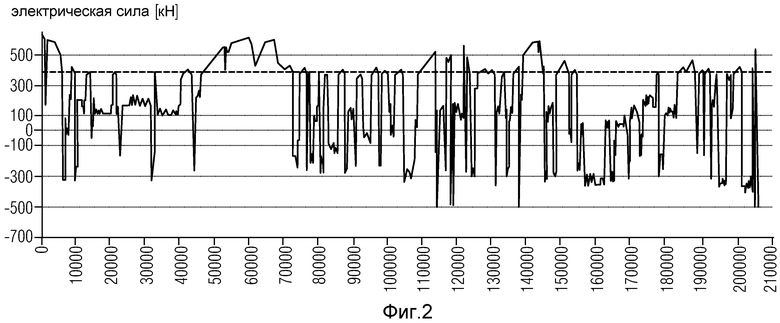
Фиг.1 - продольный профиль пути следования с соответственно разрешенной самой высокой скоростью,
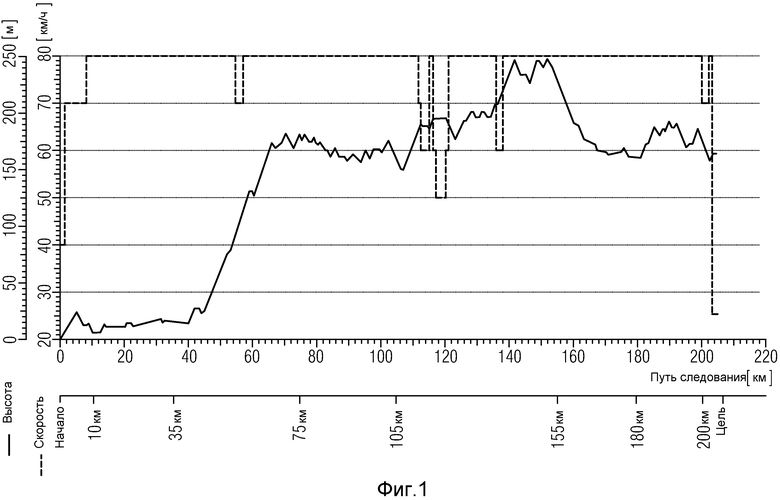
Фиг.2 - рассчитанная для продольного профиля пути согласно фиг.1 требуемая сила тяги, а также максимальная приводная энергия частичного локомотива двухсекционного локомотива.
Фиг.1 показывает продольный профиль пути в форме линии равных высот, а также согласованную с продольным профилем пути кривую соответственно разрешенной самой высокой скорости. На абсциссе отложено удаление от исходного вокзала. Также представлено две ординаты. Первая ордината в качестве единиц измерения имеет скорость. Отличие по высоте относительно исходного вокзала отложено на второй задней ординате в метрах. Можно видеть, что путь следования рельсового транспортного средства начинается на исходном вокзале на уровне (высоте) ноль метров. Первые километры пути лежат в городской области. Поэтому разрешена максимальная скорость лишь 40 км/ч. Как показывает нижняя кривая, путь следования на первых 3 км поднимается до 6 м. Допустимая максимальная скорость составляет здесь 80 км/ч. После 43 км путь следования имеет сильный подъем в течение 10 км.
На Фиг.2 также показана диаграмма, причем на абсциссе вновь представлен путь в метрах. На ординате отложена электрическая мощность. Зубчатая кривая показывает рассчитанную для продольного профиля пути согласно фиг.1 требуемую силу тяги. При этом исходят из двухсекционного локомотива, который имеет два идентичных частичных локомотива. Проходящая параллельно абсциссе прямая линия при 400 кН показывает максимальную приводную мощность частичных локомотивов. Можно видеть, что зубчатая линия переходит за упомянутую прямую линию максимальной приводной мощности в области сильных подъемов пути следования. В этих частичных областях в рамках изобретения включены оба частичных локомотива двухсекционного локомотива, так что может создаваться требуемая сила тяги. В других частичных областях достаточно одиночной эксплуатации одного единственного частичного локомотива, чтобы были удовлетворены требования к приводной мощности привода. Однако, не смотря на это, в этих областях относительно потребления энергии и относительно возможности возврата энергии из энергии торможения может быть более благоприятным включение обоих частичных локомотивов. Это имеет место тогда, когда эти оба частичных локомотива совместно нуждаются в меньшей энергии, чем один частичный локомотив отдельно, или когда в областях с сильным уклоном оба частичных локомотива могут возвращать больше энергии в сеть энергоснабжения, чем только один частичный локомотив.
Режим движения в рамках этого примера осуществления соответствующего изобретению способа осуществляется с помощью двух частичных локомотивов, если этого требует требуемая сила тяги на путевой точке, другими словами, если максимальная приводная мощность частичного локомотива меньше, чем требуемая сила тяги. Эксплуатация осуществляется также с помощью двух частичных локомотивов также тогда, когда за счет этого может достигаться более высокий возврат энергии из энергии торможения (т.е. рекуперация энергии торможения) в режиме торможения. Более того, два частичных локомотива также используются, когда общий коэффициент полезного действия обоих частичных локомотивов находится выше коэффициента полезного действия частичного локомотива на путевой точке. Если имеет место меньшее из ранее названных условий, то осуществляется эксплуатация рельсового транспортного средства с помощью одного частичного локомотива.
Следовательно, в зависимости от продольного профиля пути изменяется количество включенных частичных локомотивов. Прежде всего определяются путевые точки. Они могут представлять собой характерные (заметные) точки, которые уведомляют о начале подъема или крутом спуске. Однако путевые точки также могут быть эквидистантно распределены по участку пути. Для путевых точек, прежде всего, определяются рабочие точки рельсового транспортного средства. Как уже дополнительно было сказано выше, рабочая точка также может называться как состояние рельсового транспортного средства во время движения. Рабочая точка включает в себя характеристические величины, как например, скорость, подъем пути следования в путевой точке, нагрев приводных компонентов, число оборотов и тому подобное. Для каждой из этих рабочих точек теперь рассчитывается коэффициент полезного действия, то есть отношение созданной механической приводной энергии к использованной электрической энергии. Расчет осуществляется с помощью сохраненных в табличном виде или описанных формулами коэффициентов полезного действия компонентов соответствующего приводного блока, как например, главные трансформаторы, выпрямители переменного тока, редукторы и тому подобное. Таким образом, для каждой путевой точки определяется коэффициент полезного действия привода с одним частичным локомотивом и коэффициент полезного действия привода с двумя частичными локомотивами. Согласно одному из представленных выше способов выбора рассчитывается количество приводных блоков или частичных локомотивов так, что максимально высокий коэффициент полезного действия создается при торможении или во время тягового (приводного) режима, причем гарантировано, что предоставлена достаточно высокая приводная (тяговая) энергия.
Для реализации соответствующего изобретению способа в рельсовом транспортном средстве необходимы только незначительные затраты. Таким образом, например, возможно соответствующим образом адаптировать управляющее программное обеспечение привода к локомотиву. Переключение осуществляется, например, автоматически при получении путевой информации в определенных путевых точках, посредством бализ или тому подобного. Однако о достижении путевой точки управляющее программное обеспечение привода может извещаться также с помощью поддерживаемых спутниками систем определения положения, как например GPS или тому подобное. Также в рамках изобретения возможно переключение машинистом на основе внесенных в рейсовый журнал данных.
Первые результаты при реализации изобретения показали, что общее потребление энергии может быть снижено на 3-5%. Более того, сокращены выходы из строя компонентов привода, так как компоненты менее сильно нагружаются.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ЭФФЕКТИВНОСТИ АВТОТОРМОЗОВ ПОЕЗДА В ПУТИ СЛЕДОВАНИЯ | 2005 |
|
RU2293673C2 |
| СПОСОБ КОМПЕНСИРОВАНИЯ ПОТЕРИ СИЛЫ ТЯГИ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2723614C1 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РЕЙСА ДЛЯ ПОЕЗДА | 2007 |
|
RU2484994C2 |
| СПОСОБ ВЫБОРА НАИБОЛЕЕ ЭКОНОМИЧНОГО РЕЖИМА ДВИЖЕНИЯ ПОЕЗДА НА ЗАДАННОМ УЧАСТКЕ ПУТИ | 2003 |
|
RU2237589C1 |
| СПОСОБ УВЕЛИЧЕНИЯ СЦЕПЛЕНИЯ КОЛЕСА С РЕЛЬСОМ | 2012 |
|
RU2504492C1 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2359400C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ | 2013 |
|
RU2544285C1 |
| Способ управления рельсовым транспортным средством и система для его реализации | 2024 |
|
RU2830326C1 |
| СПОСОБ ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ ПРИ ПРИБЛИЖЕНИИ ИХ К ЗАНЯТОМУ ПУТЕВОМУ УЧАСТКУ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2511742C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА УЧАСТКАХ С ЭЛЕКТРИЧЕСКОЙ ТЯГОЙ | 2020 |
|
RU2738487C1 |
Cпособ управления приводом рельсового транспортного средства, которое имеет привод с несколькими приводными блоками, согласно которому приводные блоки подключают к приводу и отключают от него, так что сумма приводных усилий приводных блоков больше, чем требуемая сила тяги. Предлагается рассчитывать требуемую силу тяги в зависимости от пути следования для отдельных участков пути следования и количество включенных приводных блоков изменять во время движения и приспосабливать к соответственно требуемой силе тяги. Технический результат заключается в снижении потребления энергии и повышении надежности привода.2 н. и 14 з.п. ф-лы, 2 ил.
1. Способ управления приводом рельсового транспортного средства, которое имеет привод с несколькими приводными блоками, в котором приводные блоки подключают к приводу или отключают от него, так что сумма приводных усилий включенных приводных блоков больше, чем требуемая сила тяги, отличающийся тем, что требуемую силу тяги рассчитывают в зависимости от пути следования для отдельных участков пути следования и количество включенных приводных блоков изменяют во время движения и приспосабливают к соответственно требуемой силе тяги.
2. Способ по п.1, отличающийся тем, что количество включенных приводных блоков изменяют в путевых точках пути следования.
3. Способ по п.2, отличающийся тем, что для каждой путевой точки рассчитывают требуемую силу тяги, а затем включают, по меньшей мере, так много приводных блоков, чтобы сумма приводных усилий включенных приводных блоков была больше, чем требуемое усилие тяги.
4. Способ по п.3, отличающийся тем, что в определенных путевых точках определяют соответствующую рабочую точку рельсового транспортного средства, для этой определенной рабочей точки для каждого количества включаемых приводных блоков рассчитывают коэффициент полезного действия, определенные таким образом коэффициенты полезного действия сравнивают друг с другом для получения оптимального коэффициента полезного действия, а затем включают столько приводных блоков, чтобы их количество соответствовало количеству приводных блоков, которые согласованы с оптимальным коэффициентом полезного действия.
5. Способ по п.4, отличающийся тем, что упомянутые соответствующие рабочие точки и согласованные с этими рабочими точками коэффициенты полезного действия рассчитывают перед началом движения рельсового транспортного средства.
6. Способ по п.4, отличающийся тем, что коэффициенты полезного действия для путевых точек пути следования определяют с помощью метода моделирования.
7. Способ по п.4, отличающийся тем, что коэффициенты полезного действия определяют как относительно возможности возврата энергии в режиме торможения, так и относительно создаваемого приводного усилия.
8. Способ по п.1, отличающийся тем, что каждый приводной блок представляет собой один локомотив.
9. Способ по одному из п.п.1-7, отличающийся тем, что приводные блоки представляют собой электроприводные модули ходовых тележек.
10. Способ по п.8, отличающийся тем, что два локомотива выполнены в виде двухсекционного локомотива, причем каждый локомотив представляет собой один приводной блок.
11. Способ по одному из п.п.1-8 или 10, отличающийся тем, что требуемую силу тяги, разрешенную для места нахождения, рассчитывают перед началом движения при получении набора данных.
12. Способ по п.9, отличающийся тем, что требуемую силу тяги, разрешенную для места нахождения, рассчитывают перед началом движения при получении набора данных.
13. Способ по п.11, отличающийся тем, что набор данных рассчитывают в расположенном за пределами рельсового транспортного средства месте и передают из этого места на рельсовое транспортное средство посредством передачи данных.
14. Способ по п.12, отличающийся тем, что набор данных рассчитывают в расположенном за пределами рельсового транспортного средства месте и передают из этого места на рельсовое транспортное средство посредством передачи данных.
15. Рельсовое транспортное средство, содержащее имеющий, по меньшей мере, два приводных блока привод и связанный с приводом управляющий блок, который предназначен для включения и отключения приводных блоков, отличающееся тем, что управляющий блок имеет средства для предоставления требуемой силы тяги для определенных участков пути следования, причем управляющий блок изменяет количество приводных блоков во время движения и отключает приводные блоки, пока сумма приводного усилия включенных приводных блоков больше, чем требуемая сила тяги на соответствующем участке пути.
16. Рельсовое транспортное средство по п.15, отличающееся средствами для определения коэффициентов полезного действия привода в зависимости от количества включенных приводных блоков, причем управляющий блок предназначен для включения такого количества приводных блоков, чтобы был предоставлен максимальный коэффициент полезного действия привода.
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ВОЖДЕНИЯ ГРУЗОВЫХ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ С РАСПРЕДЕЛЕННЫМИ ПО ИХ ДЛИНЕ ЛОКОМОТИВАМИ | 2003 |
|
RU2238860C1 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РЕЙСА ДЛЯ ПОЕЗДА | 2007 |
|
RU2484994C2 |
| DE 4037626 A1 ,04.06.1992 | |||

