Изобретение относится к измерительной технике и может быть использовано для дистанционного измерения параметров движения, в частности скорости, а также определения закона изменения скорости по траектории движения с использованием распределенного регистрирующего контура в виде разнесенных вдоль траектории движения объекта датчиков с колоколообраз- ным выходным сигналом, в частности, индукционных датчиков с интегратором на выходе, при контроле проводников с изменяющимся по величине током, например, сгустка электропроводной плазмы, движущейся внутри трубы.
Цель изобретения - повышение точности измерения скорости на участке пути между двумя датчиками.
Поставленная цель достигается тем, что в способе измерения скорости движения объекта, заключающемся в разбиении этого участка N координат Xi, измерении напряжений возмущения объектом датчиков, определении разности 1)д и суммы Us напряжений возмущений смежных датчиков, определении информативного параметра, как отношения напряжений Уд/и/, формировании координатной функции в виде сигнала изменяющегося в функции координаты ; движения объекта, периодическом принуди-. тельном сдвиге координатной функции параллельно самой себе на заранее рассчитанную величину, постоянную для каждого участка пути, таким образом, чтобы в заданных координатах Xi сигнал координатной функции проходил через нуль, фиксировании этих моментов времени ti и
oo
О
ro 4
b.
определении средней скорости на j-том интервалепути (Xj-Хы) как X,-Xi-i
Vcp) , где i 1,2,...,N, J
ti - 11 - 1
1,2,...,(N-1) разделяют датчики на две группы, объединяя датчики с нечетными порядковыми номерами в первую группу, а с четными порядковыми номерами - во вторую группу, одновременно формируют первый и второй информативный параметры из выходных сигналов датчиков первой и второй группы соответственно, а сигнал координатной функции получают путем непрерывного суммирования первого и второго информативного параметров, причем поочередные переключения от одной пары датчиков к другой паре в первой группе для формирования первого информативного параметра осуществляют в моменты перехода через нуль второго информативного параметра, а переключения от одной пары датчиков к другой паре во второй группе для формирования второго информативного параметра - в момент перехода через нуль первого информативного параметра.
Сущность предлагаемого технического решения заключается в том, что используемая в нем в качестве координатной функции :сумма первого и второго информативных параметров, в отличие от.каждого из них отдельно, на всем протяжении участка траектории между соседними датчиками не имеет мертвых зон благодаря своей почти линейной характеристике, что обеспечивает практически одинаковую точность процесса измерения скорости на всем контролируемом участке траектории движения объекта. При этом все упомянутые преимущества способа-прототипа в заявляемом способе сохраняются в полной мере.
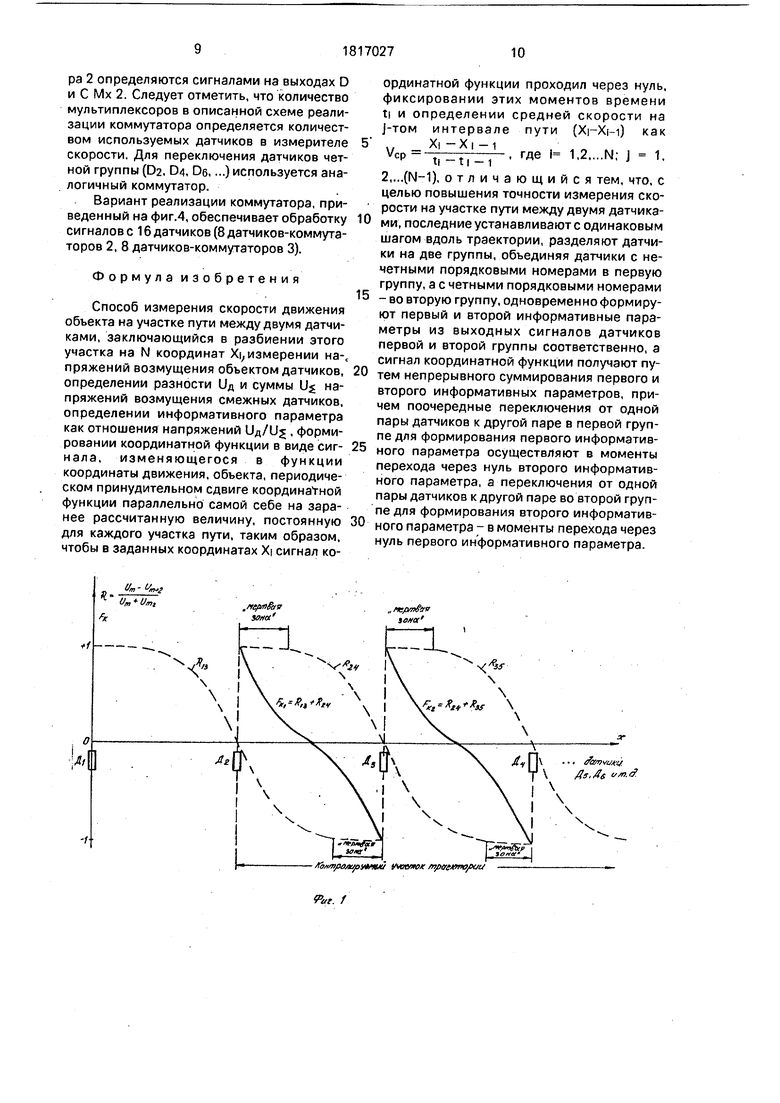
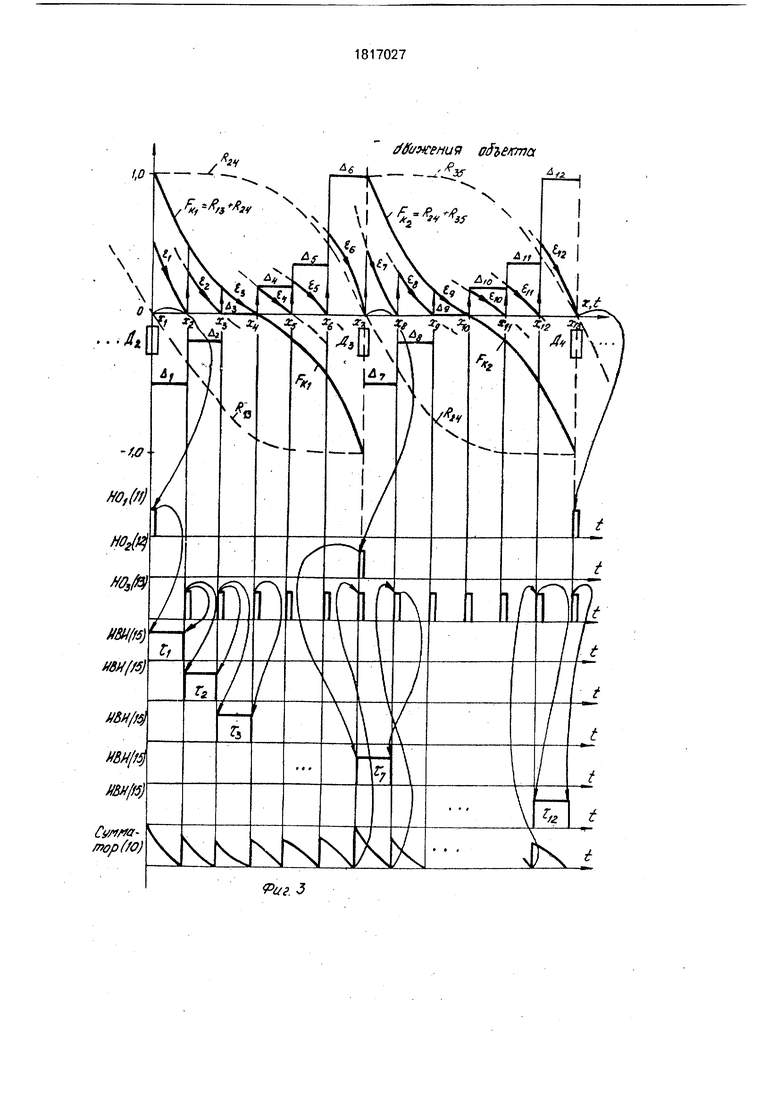
На фиг.1 приведены графики, поясняющие принцип формирования координатной функции FK из первого (Ria) и второго (Ra) информативных параметров, образованных соответственно из выходных сигналов пары датчиков нечетной и четной групп; на фиг.2 - в качестве примера реализации заявляемого способа блок-схема устройства для измерения скорости движения объекта; на фиг.З - диаграммы, поясняющие работу отдельных узлов устройства для измерения скорости и реализованный в нем принцип многократного сдвига координатной функции параллельно самой себе с целью идентификации положения объекта по переходу координатной функции через нуль; на фиг.4 - пример схемной реализации парного коммутатора 2, 3.
Как видно из фиг,1, где приведены рассчитанные на ЭВМ зависимости координатных функций от координаты X, в отличие от используемой в способе прототипе координатной функции R (Ri3 - координатная функция, образованная из выходных сигналов датчиков DI и Оз; R24 - координатная функция, образованная из выходных сигналов датчиков Da и D4,
R35 - координатная функция, образованная из выходных сигналов датчиков Оз и
Об, Причем R (Um-Um + 2)/(Um + Um f2), ГД6
m 1, 2, ...), используемая в заявляемом способе координатная функция ви5 да FK Ri3+ R24 не имеет почти горизонтальных участков в местах установки датчиков, а значит не имеет мертвых зон, в пределах которых затруднена идентификация координат. Как видно из фиг.1 ко0 ординатная функция вида FK1 Ri3+ R24 в значительной степени более линейна, чем координатная функция R в способе- прототипе. Переходя в процессе движения объекта от одной координатной функции
5 FK1 Ri3+ R24 к другой FK2 R24 + R35 и т.д., можно обеспечить перекрытие всей контролируемой траектории.
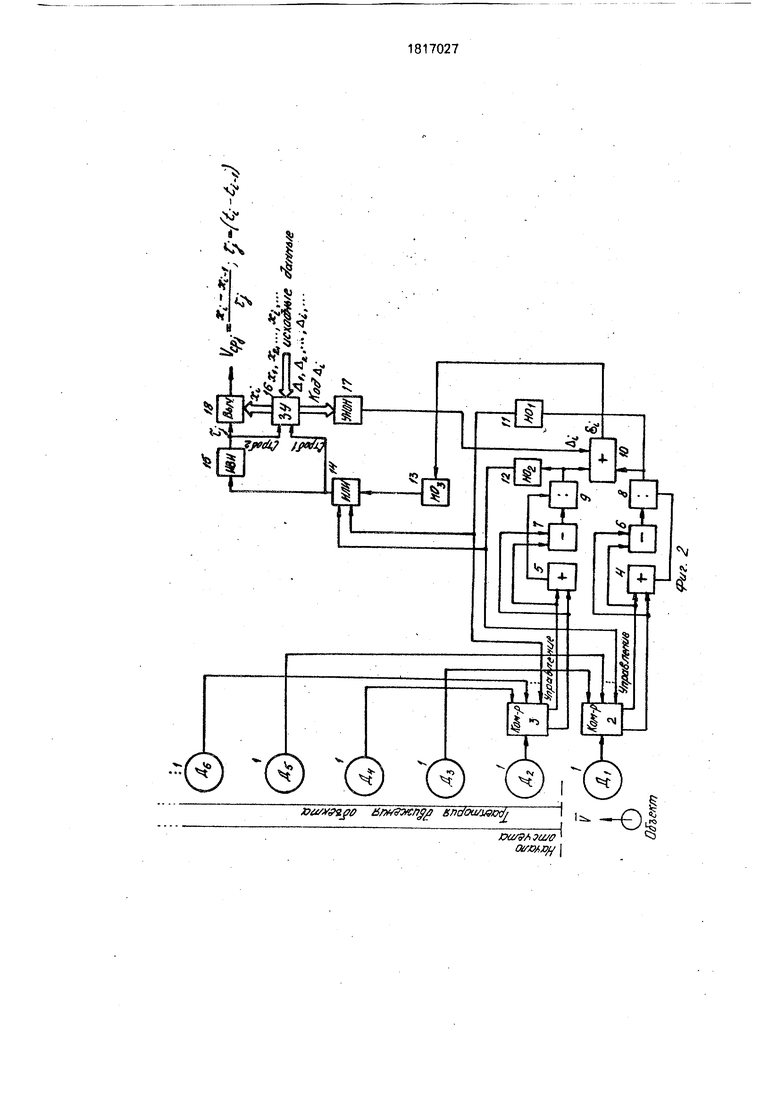
Блок-схема устройства, реализующего предложенный способ, приведена на рис,2.
0 Устройство содержит датчики положения 1 с колоколообразным выходным сигналом, которые разбиты на две группы - нечетные (Di, 63, Ds,...) и четные (D2, D4, Об,...), причем все датчики 1 с одинаковым
5 шагом распределены вдоль траектории движения объекта, а первый датчик (О вынесен за пределы контролируемого участка траектории и установлены до начала этого участка, первый парный коммутатор 2 ана0 логовых сигналов и второй парный коммутатор 3 аналоговых сигналов, первый двухвходовой сумматор 4 и второй двухвхо- довой сумматор 5, первый блок 6 определения разности двух непрерывных сигналов и
5 второй 7 блок определения разности двух непрерывных сигналов, первый блок деления 8 и второй блок деления 9, трехвходовой сумматор 10, первый нуль-орган (H0i)11, второй нуль-орган (Н02)12 и третий нуль-орган
0 (Н0з)13, логический элемент ИЛИ 14, измеритель
временных интервалов (ИВИ)15, запоминающее
устройство (ЗУ)16, управляемый источник
опорного напряжения (УИОН)17, вычислитель 18.
Выходы всех нечетных датчиков 1 (Di,
5 Оз, Об,...) подключены к информационным входам первого коммутатора 2, а выходы всех четных датчиков (Da. 04, Об,...) подключены к информационным входам второго коммутатора 3. Выходы первого парного коммутатора 2 подключены ко входам первого сумматора 4, а выходы второго парного коммутатора 3 подключены ко входам второго сумматора 5. Выходы сумматоров А и 5 подключены ко входам делимое соответственно блока деления 8 и блока деления 9, Ко входам делитель блоков деления 8 и 9 подключены выходы соответственно первого блока 6 определения разности двух сигналов и второго блока 7 определения разности двух сигналов. Выходы блоков 8 и 9 деления подключены к первому и второму входам трехвходового сумматора 10 и ко входам соответственно первого 11 и второго 12 нуль-органов (HOi и HCte). Выход первого нуль-органа (H0i)11 соединен со входом управление второго коммутатора 3, а выход второго нуль-органа (H02J12 соединен со входом управление первого коммутатора 2. Выход трехвходового сумматора 10 подключен ко входу третьего нуль-органа 13, к выходу которого через логический элемент ИЛИ 14 подключены вход измерителя временных интервалов (ИВИ)15, а также первый стробирующий вход (строб 1) ЗУ 16. Второй стробирующий вход (строб 2) ЗУ 16 соединен с выходом ИВИ 15. Первый выход ЗУ 16 соединен со входом УИОН 17, выход которого подключен к третьему входу трехвходового сумматора 10. Второй выход ЗУ 16 подключен ко второму информационному входу вычислителя 18, выход которого является выходом устройства для измерения скорости. Выход первого 11 и второго 12 нуль-органов через элемент ИЛИ 14 подключены ко входу ИВИ 15. Вычислитель 18 выполняет функцию вычисления значений скорости VCpj на заданных интервалах пути по формуле Vcpj (ХгХы)/т, где т (trti-i). Исходные данные (координаты Xi, X2,..., Xi,...) и соответствующие напряжения сдвига AI , AQ ,..., А;,... загружаются до начала эксперимента в ЗУ 15. В качестве УИОН 17 может быть использован, например, цифро- аналоговый преобразователь (при реализации устройства для измерения скорости на аналоговой элементной базе).
Парные коммутаторы 2 и 3 осуществляют подключение к соответствующим сумматорам 4 и 5 в каждый момент времени выходов двух датчиков соответственно из нечетной и четной групп (Di и Оз, D2 и D/J). При появлении сигналов на входах управление парные коммутаторы 2 и 3 осуществляют перекоммутацию выходов датчиков, в результате чего к сумматорам 4 и 5 оказываются подключены следующие пары (Оз и DS, Ол и Об) соответственно из нечетной и четной групп.
Устройство функционирует следующим образом. В момент прохождения объектом (см.фиг.2) датчика DZ (1) сигнал Ria на выходе устройства деления 8, равный отчоше- 5 нию сигналов датчиков Di и Оз к их сумме, переходит через нуль (см.фиг.З), в результате чего на выходе H0i(11) появляется импульс. Этот импульс, проходя через элемент ИЛИ 14, запускает ИВИ 15 на отсчет интер0 вала времени п.
К моменту подхода объекта к датчику 02 (1) первый парный коммутатор 2 находится в состоянии, при котором ко входам сумматора 4 и устройства вычитания 6 ока5 зываются подключенными выходы двух датчиков D.i и Оз, а ко входам сумматора 5 и устройства вычитания 7 - выходы двух датчиков 02 и Оз.
Одновременно с формированием запу0 екающего импульса на входе ИВИ 15 на вход строб 1 ЗУ 16 также приходит импульс, по которому из ЗУ 16 извлекается код напряжения смещения Дч, который поступает на УНИОН 17. На выходе последнего по5 является соответствующее значение уровня напряжения AI, имеющего знак, противоположный знаку F«1 Ri3 + R24, которое складывается в трехвходовом сумматоре 10 с сигналами Ria и R24 (сформированными со0 ответственно из сигналов пар датчиков От и Оз, 02 и 04), образуя результирующий сигнал Јi, который фактически является координатной функцией F«1, сдвинутой параллельно самой себе на постоянную ве5 личину AI, рассчитанную таким образом, что нулевое значение сигнала d окажется в следующей заданной координате Х2. В этот момент срабатывает НОз (13), на выходе которого появляется импульс, проходящий
0 через схему ИЛИ 14 на вход строб 1 ЗУ 16 и на ИВИ 15. Последний останавливает счет интервала т и начинает отсчет очередного интервала времени TI. По импульсу на входе строб 1 ЗУ 16 из последнего извлекается код напряжения смещения Дг, который в УНИОН 17 преобразуется в соответствующее значение аналогового сигнала Да, поступающего на вход сумматора 10, где,
л складываясь со значениями Ria и R24. образует новое значение Ј2. Далее процесс повторяется. В момент перехода R24 через нуль (координата X), срабатывает нуль-орган Н02 (12), который формирует импульс,
е поступающий на вход управления первого парного коммутатора 2. В результате последний осуществляет перекоммутацию датчиков и к сумматору 4 и устройству вычитания 6 оказываются подключены датчики Оз и DS (подключается DS и одновременно
отключается Di). Благодаря этому на выходе блока деления 8 начинает формироваться новая функция Ras вместо функции Ri3 (см.фиг.3). В третьем сумматоре 10 опять производится сложение функций RSS и R24 и образуется новая координатная функция FK2 R24+ Яз5. обработка которой осуществляется аналогично описанной выше обработке координатной функции FK1 Ri3+ R24.
При переходе объекта от датчика к датчику процесс повторяется. Таким образом, в вычислителе 18, куда в процессе измерения поступают зафиксированные интервалы времени ц (а также по сигналам на вход строб 1 ЗУ 1 б соответствующие значения заданных интервалов пути Х|, осуществляется вычисление значений средней скорости VCpj (XrX|-i)/ Г| на каждом интервале пути. Между соседними датчиками может размещаться множество таких интервалов. Значения заданных координат регистрации Xj на траектории движения и рассчитанные значения напряжения смещения Д| для соответствующих координат регистрации вносятся в ЗУ 16 заранее до начала процесса измерений. Расчет значений напряжений смещения (сдвига) Д осуществляют предварительно до начала измерений по формуле
А -FK(),
где FK(Xi + 1) - значение координатной функции FK в координате Xi+i, и-заносят в запоминающее устройство ЗУ 16. Построения на фиг.З выполнены в соответствии с выражением (1). Координатная функция FK в соответствующих координатах Xi, X2,... рассчитывается по известной характеристике вход-выход для заданного типа датчиков положения исходя из выражений:
+ R24; Rw Ul
U3
Ui + из
R24 . ,2 7 i i4 I рк2 R24 + R35I U2 + U4
R U2 U4 . Rc U3-U5 .
R24 u2 + u4 Рз5-Ж+иГ
и т.д.
где FK1 - координатная функция, сформированная изсигналовдатчиков Di, Оз и D2,
- координатная функция, сформированная из сигналов датчиков D2, D4 и Оз, 05;
Ui, 1)2, Us, IU, Us -.выходные сигналы 5 датчиков Di, D2, Оз, 0, Dg соответственно. В случае использования идентичных датчиков и благодаря расположению датчиков с одинаковым шагом вдоль траектории имеет равенство Р«2(см.фиг.1), поэтому 10 достаточно предварительно рассчитать только одну координатную функцию FK, одинаковую для всех соответствующих пар датчиков, т.е. FK FKi F«2 .... Соответственно при переходе от FK1 к FK2 и т.д. будут повто- 15 ряться значения напряжений смещения (сдвига). Это хорошо видно на фиг.З.
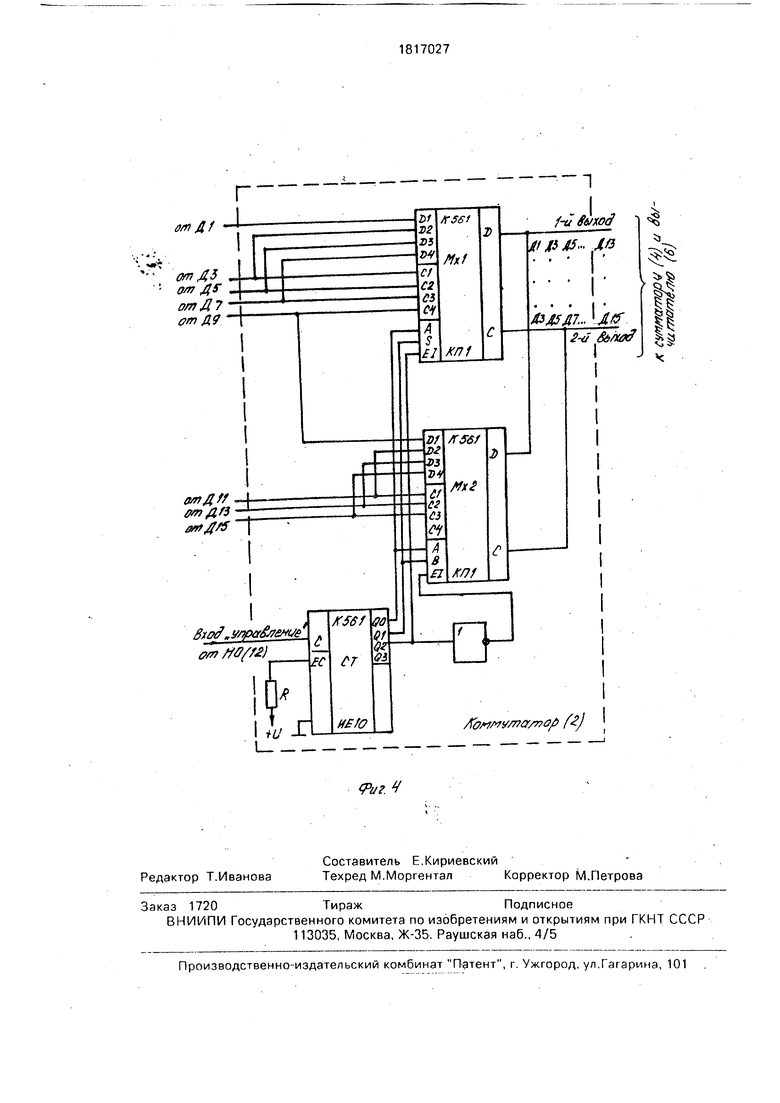
Вариант реализации первого и второго коммутаторов 2, 3 приведен на фиг.4. В качестве примера рассмотрена реализация 20 коммутатора 2. Как видно из фиг, 4, коммутатор выполнен на микросхемах К 561 КП 1 (два сдвоенных мультиплексора Мх 1 и Мх 2), К 561 ЛН 2 (инвертор) и К 561 ИЕ 10 (двоичный счетчик). Приведенная схема яв- 25 ляется типовой. Особенностью применения данной схемы является подключение датчиков 1 ко входам схемы специальным образом, как это показано на фиг.4.
Схема коммутатора 2 работает следую- 30 щим образом. В исходном положении на . входы управления А и В мультиплексоров Мх 1 и Мх 2 с выходов Q0, Qi счетчика СТ поступает нулевой уровень сигнала, а на вход Е1 Мх 1 непосредственной вход Е1 Мх 35 2 через инвертор с выхода Оз СТ поступают сигналы: нуль на Мх 1 и единица на Мх 2. ТакимЪбразом, в исходном состоянии выходы О и С Мх 2 приведены в третье устойчивое состояние. Тогда состояние обоих 40 выходов коммутатора 2 определяется сигналами на выходах D и С Мх 1, а в соответствии с сигналами на входах А и В мультиплексоров к выходам О и С Мх 1 оказываются подключены выходы датчиков Di и Оз. 45 После прихода сигнала управления на вход коммутатора 2 (вход С счетчика СТ) от НО 12 (см.фиг.2) счетчик СТ переходит в следующее состояние. При этом сигналы на выходах СИ, 02 счетчика СТ не изменяются, 50 а на его выходе Оо появляется единица. Благодаря этому Мх 2 остается по-прежнему отклоненным (третье состояние), а к выходам D и С Мх 1 подключаются входы 02, С 2 Мх 1, а соответственно, и выходы датчиков 55 Оз, DS. Далее процесс подключения к выходу коммутатора 2 выходов происходит аналогично описанному. Причем после прихода четвертого импульса от НО 12 на вход управления счетчика СТ Мх 1 переходит в третье достояние, а сигналы на выходе коммутатоpa 2 определяются сигналами на выходах D и С Мх 2. Следует отметить, что количество мультиплексоров в описанной схеме реализации коммутатора определяется количеством используемых датчиков в измерителе скорости. Для переключения датчиков четной группы (D2, D4, De,...) используется аналогичный коммутатор.
Вариант реализации коммутатора, приведенный на фиг.4, обеспечивает обработку сигналов с 16 датчиков (8 датчиков-коммутаторов 2, 8 датчиков-коммутаторов 3).
Формула изобретения
Способ измерения скорости движения объекта на участке пути между двумя датчиками, заключающийся в разбиении этого участка на N координат Х|;измерении на- пряжений возмущения объектом датчиков, определении разности ид и суммы Uj напряжений возмущения смежных датчиков, определении информативного параметра как отношения напряжений Цц/К , формировании координатной функции в виде сигнала, изменяющегося в функции координаты движения, объекта, периодическом принудительном сдвиге координатной функции параллельно самой себе на заранее рассчитанную величину, постоянную для каждого участка пути, таким образом, чтобы в заданных координатах Xi сигнал ко
0
5
0
5
0
ординатной функции проходил через нуль, фиксировании этих моментов времени ti и определении средней скорости на j-том интервале пути (X|-Xj-i) как
,.1 . где i 1,2....N;J 1.
2,...(N-1), отличающийся тем, что. с целью повышения точности измерения скорости на участке пути между двумя датчиками, последние устанавливают с одинаковым шагом вдоль траектории, разделяют датчики на две группы, объединяя датчики с нечетными порядковыми номерами в первую группу, а с четными порядковыми номерами - во вторую группу, одновременно формируют первый и второй информативные параметры из выходных сигналов датчиков первой и второй группы соответственно, а сигнал координатной функции получают путем непрерывного суммирования первого и второго информативных параметров, причем поочередные переключения от одной пары датчиков к другой паре в первой группе для формирования первого информативного параметра осуществляют в моменты перехода через нуль второго информативного параметра, а переключения от одной пары датчиков к другой паре во второй группе для формирования второго информативного параметра - в моменты перехода через нуль первого информативного параметра.
I
N
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости движения объекта | 1988 |
|
SU1744652A1 |
| Способ измерения скорости движения объекта и устройство для его осуществления | 1988 |
|
SU1672378A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| Интерполятор с самоконтролем | 1990 |
|
SU1777122A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2172960C2 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2169926C1 |
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Способ поверки стрелочного измерительного прибора и устройство для его осуществления | 1989 |
|
SU1753432A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1605307A1 |
Использование: измерительная техника, дистанционное измерение параметров движения. Сущность изобретения: разделяют датчики на две группы: нечетные и четные, формируют информативные сигналы как отношение разности и выходных сигналов двух смежных датчиков каждой группы к сумме этих сигналов, формируют координатную функцию непрерывным суммированием первого и второго информативных сигналов, периодически принудительно сдвигают координатную функцию параллельно самой себе на заранее рассчитанную величину, чтобы в заданных координатах.Xi траектории сигнал координатной функции проходил через нуль, фиксируют эти моменты времени ti, определяют значение скорости на j-ом интервале траектории (X|-Xi-i) X, - X i - 1 как -ti -i где i 1,2..,N, j 1,2...(N-1). СЛ с
LZOLIQI
Я
I А
V
| Способ измерения скорости движения объекта | 1982 |
|
SU1068818A1 |
| Способ измерения скорости движения объекта | 1988 |
|
SU1744652A1 |
