Уровень техники
1. Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления и к способу управления для транспортного средства, которые передают крутящий момент, выводимый из источника мощности приведения в движение, на ведущее колесо.
2. Описание предшествующего уровня техники
[0002] Приводное устройство гибридного транспортного средства, имеющего двигатель, первый мотор и второй мотор в качестве источников мощности приведения в движение, описывается в публикации заявки на патент Японии номер 2009-120043 (JP 2009-120043 А). Приводное устройство гибридного транспортного средства, описанное в этой JP 2009-120043 А, оснащено механизмом деления мощности, который передает выходной крутящий момент двигателя и первого мотора на сторону ведущих колес. Механизм деления мощности состоит из планетарной зубчатой передачи односателлитного типа. Двигатель соединяется с водилом планетарной зубчатой передачи, первый мотор соединяется с солнечной шестерней, и выходной элемент, который передает мощность на ведущее колесо, соединяется с коронной шестерней. В этом гибридном транспортном средстве, приведение в движение может выполняться посредством избирательного задания режима приведения в движение за счет электрического привода, в котором выходная мощность, по меньшей мере, из одного из первого мотора и второго мотора в состоянии, в котором двигатель остановлен, передается на ведущее колесо, рекуперативного режима приведения в движение, в котором, по меньшей мере, любой из первого мотора или второго мотора принудительно выступает в качестве генератора, и режима приведения в движение за счет двигателя, в котором выходная мощность из двигателя передается на ведущее колесо. Дополнительно, приводное устройство гибридного транспортного средства, описанное в этой JP-2009-120043 A, оснащено зацепляющей муфтой (стопорящим механизмом) для прекращения и фиксации вращения двигателя в вышеуказанном режиме приведения в движение за счет электрического привода. Зацепляющая муфта располагается в кожухе, который размещает первый мотор, второй мотор, механизм деления мощности и т.п.
[0003] Дополнительно, трансмиссия для транспортного средства, оснащенного механизмом переключения передач, в который крутящий момент двигателя вводится через входной вал трансмиссии, и ограничителем крутящего момента, расположенным между входным валом трансмиссии и двигателем, описывается в Международной публикации № WO2013/140527. Ограничитель крутящего момента выполнен с возможностью разрешать передачу крутящего момента между входным валом трансмиссии и выходным валом двигателя и запрещать передачу большего добавочного крутящего момента, чем предварительно определенный крутящий момент, между входным валом трансмиссий и выходным валом двигателя. Трансмиссия для транспортного средства, описанная в этой Международной публикации № WO2013/140527, монтируется на гибридном транспортном средстве, имеющем двигатель, первый мотор и второй мотор в качестве источников мощности приведения в движение, аналогично JP 2009-120043 А. Односторонняя муфта или кулачковая муфта предоставляется в качестве зацепляющего механизма, который разрешает нормальное вращение выходного вала двигателя и предотвращает обратное вращение выходного вала двигателя.
[0004] Согласно приводному устройству гибридного транспортного средства, описанному в вышеуказанной JP 2009-120043 А, когда приведение в действие моторов выполняется в режиме приведения в движение за счет электрического привода, потери от торможения двигателя в ходе приведения в действие моторов могут уменьшаться посредством приведения в действие стопорящего механизма, чтобы прекращать (стопорить) вращение двигателя. Дополнительно, в случае, если приведение в действие моторов выполняется с высокой выходной мощностью посредством выходного крутящего момента как первого мотора, так и второго мотора, выходной крутящий момент первого мотора может эффективно передаваться в выходной элемент через механизм деления мощности, в котором вращение водила стопорится, вместе с двигателем. В приводном устройстве гибридного транспортного средства, описанном в JP 2009-120043 А, например, если кулачковая муфта, которая описывается в вышеуказанной Международной публикации № WO2013-140527, применяется, может подавляться ввод чрезмерного крутящего момента в тракте передачи мощности между ведущим колесом и двигателем.
Сущность изобретения
[0005] В случае, если вышеуказанная кулачковая муфта применяется к приводному устройству вышеуказанного гибридного транспортного средства, функция стопорения и функция ограничения становятся совместимыми между собой, коэффициент трения на контактных поверхностях зацепляющих зубьев в кулачковой муфте оказывает влияние на предельный крутящий момент (верхний предельный крутящий момент). Следовательно, коэффициент трения становится важным фактором. Тем не менее, угол поверхностей зубьев на поверхностях зацепления кулачковой муфты меняется в зависимости от износа вследствие старения и т.п. По этой причине, если вышеуказанный коэффициент трения оценивается с использованием начального значения во время расчетов и т.п., отклонение или ошибка может возникать в коэффициенте трения, оцененном при износе вследствие старения. Как результат, функция стопорения и функция ограничения могут снижаться.
[0006] Изобретение предоставляет устройство управления и способ управления для транспортного средства, оснащенного функцией стопорения для стопорения вращения первичных движителей, таких как двигатель и мотор, и функцией ограничения, допускающей надлежащий запрет действия чрезмерного крутящего момента на тракт передачи мощности.
[0007] Первый аспект изобретения предоставляет устройство управления для транспортного средства. Транспортное средство включает в себя зацепляющий механизм. Зацепляющий механизм включает в себя неподвижный элемент, вращающийся элемент, зацепляющие зубья, исполнительное устройство и входной элемент. Вращающийся элемент располагается таким образом, что он обращен к неподвижному элементу на оси, идентичной оси неподвижного элемента. Неподвижный элемент и вращающийся элемент выполнены с возможностью вводиться в зубчатое зацепление друг с другом, чтобы передавать крутящий момент. Неподвижный элемент и вращающийся элемент выполнены с возможностью быть отделенными относительно друг друга в осевом направлении таким образом, что ввод в зацепление между зацепляющими зубьями прекращается, и передача крутящего момента отсекается, когда крутящий момент, равный или превышающий верхний предельный крутящий момент, допускающий передачу между неподвижным элементом и вращающимся элементом, вводится во вращающийся элемент. Зацепляющие зубья, соответственно, предоставляются на взаимно обращенных поверхностях неподвижного элемента и вращающегося элемента. Зацепляющие зубья имеют формы, которые являются клиновидными к взаимно обращенным поверхностям. Исполнительное устройство выполнено с возможностью формировать осевое давление в направлении, в котором неподвижный элемент и вращающийся элемент принудительно приближаются друг к другу таким образом, что зацепляющие зубья вводятся в зубчатое зацепление друг с другом. Входной элемент выполнен так, что крутящий момент вводится во вращающийся элемент. Устройство управления включает в себя электронный модуль управления. Электронный модуль управления выполнен с возможностью управлять крутящим моментом входного элемента таким образом, что он действует на неподвижный элемент и вращающийся элемент, так что неподвижный элемент и вращающийся элемент отделены друг от друга в осевом направлении посредством входного элемента, когда осевое давление прикладывается, по меньшей мере, к одному из неподвижного элемента и вращающегося элемента посредством исполнительного устройства, с тем чтобы заставлять зацепляющие зубья вводиться в зубчатое зацепление друг с другом. Электронный модуль управления выполнен с возможностью оценивать угол наклона поверхностей зубьев на основе величины относительного перемещения в осевом направлении между неподвижным элементом и вращающимся элементом и величины относительного вращения между неподвижным элементом и вращающимся элементом. Электронный модуль управления выполнен с возможностью оценивать коэффициент трения поверхностей зубьев на основе угла наклона. Электронный модуль управления выполнен с возможностью управлять осевым давлением исполнительного устройства согласно коэффициенту трения.
[0008] В вышеуказанном устройстве управления, электронный модуль управления может быть выполнен с возможностью оценивать коэффициент трения на основе оцененного угла наклона поверхностей зубьев, осевого давления, сформированного посредством исполнительного устройства, и крутящего момента, действующего на неподвижный элемент и вращающийся элемент.
[0009] В вышеуказанном устройстве управления, электронный модуль управления может быть выполнен с возможностью понижать крутящий момент, действующий на неподвижный элемент и вращающийся элемент, когда величина относительного перемещения в осевом направлении между неподвижным элементом и вращающимся элементом превышает предварительно определенное значение.
[0010] Транспортное средство дополнительно может включать в себя планетарную зубчатую передачу, ведущее колесо, тормозной механизм, первый мотор и второй мотор. Планетарная зубчатая передача может включать в себя, по меньшей мере, три поворотных элемента из первого поворотного элемента, с которым соединяется первый мотор, второго поворотного элемента, с которым соединяется вращающийся элемент, и третьего поворотного элемента, соединенного с ведущим колесом. Тормозной механизм может быть выполнен с возможностью прикладывать тормозной крутящий момент к ведущему колесу. Второй мотор может соединяться с трактом передачи мощности между ведущим колесом и третьим поворотным элементом. В вышеуказанном устройстве управления, электронный модуль управления может быть выполнен с возможностью оценивать коэффициент трения, когда крутящий момент из первого мотора выводится, в то время как тормозной крутящий момент прикладывается к ведущему колесу посредством тормозного механизма, когда коэффициент трения оценивается. Электронный модуль управления может быть выполнен с возможностью управлять выходным крутящим моментом второго мотора таким образом, что крутящий момент, противоположный крутящему моменту, передаваемому в третий поворотный элемент, передается в третий поворотный элемент посредством вывода крутящего момента из первого мотора, когда электронный модуль управления оценивает коэффициент трения.
[0011] Тормозной механизм может представлять собой механизм блокировки коробки передач на парковке, выполненный с возможностью стопорить вращающееся тело в тракте передачи мощности между третьим поворотным элементом и ведущим колесом. В вышеуказанном устройстве управления, электронный модуль управления может быть выполнен с возможностью прекращать управление выходным крутящим моментом второго мотора, когда позиция переключения коробки передач представляет собой позицию для парковки, в которой механизм блокировки коробки передач на парковке приводится в действие.
[0012] В вышеуказанном устройстве управления, электронный модуль управления может быть выполнен с возможностью осуществлять управление тормозом для удержания на подъеме для поддержания тормозной силы, прикладываемой к ведущему колесу посредством тормозного механизма, равной предварительно определенной тормозной силе или выше. Электронный модуль управления может быть выполнен с возможностью прекращать управление выходным крутящим моментом второго мотора, когда выполняется управление тормозом для удержания на подъеме.
[0013] В вышеуказанном устройстве управления, электронный модуль управления может быть выполнен с возможностью прекращать управление для оценки коэффициента трения, когда запрос на приведение в движение для транспортного средства требуется в ходе выполнения для управления оценкой коэффициента трения.
[0014] Второй аспект изобретения предоставляет способ управления для транспортного средства. Транспортное средство включает в себя зацепляющий механизм. Зацепляющий механизм включает в себя неподвижный элемент, вращающийся элемент, зацепляющие зубья, исполнительное устройство и входной элемент. Вращающийся элемент располагается таким образом, что он обращен к неподвижному элементу на оси, идентичной оси неподвижного элемента. Неподвижный элемент и вращающийся элемент выполнены с возможностью вводиться в зубчатое зацепление друг с другом, чтобы передавать крутящий момент. Неподвижный элемент и вращающийся элемент выполнены с возможностью быть отделенными относительно друг друга в осевом направлении таким образом, что ввод в зацепление между зацепляющими зубьями прекращается, и передача крутящего момента отсекается, когда крутящий момент, равный или превышающий верхний предельный крутящий момент, допускающий передачу между неподвижным элементом и вращающимся элементом, вводится во вращающийся элемент. Зацепляющие зубья, соответственно, предоставляются на взаимно обращенных поверхностях неподвижного элемента и вращающегося элемента. Зацепляющие зубья имеют формы, которые являются клиновидными к взаимно обращенным поверхностям. Исполнительное устройство выполнено с возможностью формировать осевое давление в направлении, в котором неподвижный элемент и вращающийся элемент принудительно приближаются друг к другу таким образом, что зацепляющие зубья вводятся в зубчатое зацепление друг с другом. Входной элемент выполнен так, что крутящий момент вводится во вращающийся элемент. Способ управления включает в себя: приложение крутящего момента входного элемента к неподвижному элементу и вращающемся элементе таким образом, что неподвижный элемент и вращающийся элемент отделены друг от друга в осевом направлении посредством входного элемента, когда осевое давление прикладывается, по меньшей мере, к одному из неподвижного элемента и вращающегося элемента посредством исполнительного устройства, с тем чтобы заставлять зацепляющие зубья вводиться в зубчатое зацепление друг с другом; оценку угла наклона поверхностей зубьев на основе величины относительного перемещения в осевом направлении между неподвижным элементом и вращающимся элементом и величины относительного вращения между неподвижным элементом и вращающимся элементом; оценку коэффициента трения поверхностей зубьев на основе угла наклона; и управление осевым давлением исполнительного устройства согласно коэффициенту трения.
[0015] Согласно вышеуказанной конфигурации, осевое давление исполнительного устройства прикладывается в направлении, в котором неподвижный элемент и вращающийся элемент принудительно приближаются друг к другу таким образом, что зацепляющий зуб вращающегося элемента вводится во взаимное зацепление с зацепляющим зубом неподвижного элемента, крутящий момент вводится во вращающийся элемент в состоянии, и крутящий момент прикладывается к неподвижному элементу и вращающемуся элементу. В таком случае, составляющая сила в осевом направлении согласно вышеуказанному крутящему моменту формируется на поверхности зуба каждого из зацепляющих зубьев, которые вводятся в зубчатое зацепление друг с другом, и если составляющая сила превышает осевое давление исполнительного устройства, неподвижный элемент и вращающийся элемент относительно перемещаются в осевом направлении. Дополнительно, когда вышеуказанный крутящий момент прикладывается, неподвижный элемент и вращающийся элемент относительно вращаются одновременно со своим относительным перемещением в осевом направлении. Таким образом, поверхности зубьев, которые контактируют друг с другом, относительно перемещаются в направлении наклона поверхностей зубьев. Поскольку величины перемещения неподвижного элемента и вращающегося элемента в осевом направлении и направлении вращения в этом случае становятся величинами согласно углу наклона поверхностей зубьев, угол наклона поверхностей зубьев получается из этих величин перемещения. Поскольку осевое давление, вызываемое посредством исполнительного устройства и вышеуказанного крутящего момента, известно, коэффициент трения поверхностей зубьев получается на основе этого осевого давления, и крутящего момента, и угла наклона. Верхний предельный крутящий момент задается в зависимости от коэффициента трения и осевого давления, вызываемого посредством исполнительного устройства. Таким образом, поскольку коэффициент трения поверхностей зубьев получается на основе угла наклона фактических зацепляющих зубьев, имеющих индивидуальное различие, износа вследствие старения и т.п., может получаться зацепляющий механизм, имеющий превосходную функцию ограничения крутящего момента.
[0016] Согласно вышеуказанной конфигурации, вышеуказанный оцененный коэффициент трения оценивается на основе вышеуказанного оцененного угла наклона поверхностей зубьев, осевого давления, вызываемого посредством исполнительного устройства, и крутящего момента, действующего на неподвижный элемент и вращающийся элемент. По этой причине, даже в случае, если угол поверхностей зубьев варьируется вследствие износа вследствие старения и т.п. или имеет варьирования относительно угла поверхностей зубьев на первой стадии, этот коэффициент трения может точно оцениваться. Следовательно, поскольку осевое давление исполнительного устройства может управляться согласно оцененному коэффициенту трения, можно обеспечивать более точную совместимость функции стопорения и функции ограничения между собой.
[0017] Согласно вышеуказанной конфигурации, в случае, если величина относительного перемещения неподвижного элемента и вращающегося элемента в осевом направлении превышает предварительно определенное значение (пороговое значение), когда вышеуказанное управление оценкой коэффициента трения выполняется, крутящий момент, действующий на неподвижный элемент и вращающийся элемент, понижается. Следовательно, зацепляющий зуб, предоставленный в неподвижном элементе, и зацепляющий зуб, предоставленный во вращающемся элементе, не полностью расцепляются. По этой причине, водитель может не допускать непреднамеренного анормального шума или непреднамеренного толчка.
[0018] Согласно вышеуказанной конфигурации, крутящий момент первого мотора компенсируется посредством вывода крутящего момента второго мотора, в случае, если транспортное средство останавливается посредством тормозного механизма, к примеру, ножного тормоза. В частности, второй мотор соединяется с трактом передачи мощности между ведущим колесом и третьим поворотным элементом. Крутящий момент второго мотора передается в третий поворотный элемент таким образом, что выходной крутящий момент второго мотора является противоположным относительно крутящего момента первого мотора, передаваемого в третий поворотный элемент, когда вышеописанный коэффициент трения поверхностей зубьев оценивается. Таким образом, выходной крутящий момент второго мотора прикладывается в направлении, противоположном выходному крутящему моменту первого мотора, передаваемому на ведущее колесо. По этой причине, можно не допускать того, что крутящий момент первого мотора передается на ведущее колесо. Как результат, можно не допускать того, что транспортное средство начинает перемещаться против желания водителя.
[0019] Согласно вышеуказанной конфигурации, например, в случае, если позиция переключения коробки передач представляет собой позицию для парковки, и транспортное средство останавливается, управление выводом крутящего момента вышеуказанного второго мотора не выполняется. Таким образом, когда позиция переключения коробки передач представляет собой позицию для парковки, механизм блокировки коробки передач на парковке, который стопорит вращающееся тело в тракте передачи мощности между третьим поворотным элементом и ведущим колесом, работает. По этой причине, необязательно выводить крутящий момент второго мотора, когда выходной крутящий момент первого мотора не передается на ведущее колесо. Следовательно, потребление мощности второго мотора может уменьшаться, и в конечном счете, темп потребления мощности может повышаться.
[0020] Согласно вышеуказанной конфигурации, например, в случае, если транспортное средство останавливается посредством тормоза для удержания на подъеме, который стопорит ведущее колесо посредством поддержания или удерживания тормозной силы, которая действует на ведущее колесо, управление выводом крутящего момента вышеуказанного второго мотора не выполняется. Таким образом, в случае, если транспортное средство останавливается посредством тормоза для удержания на подъеме, выходной крутящий момент первого мотора не передается на ведущее колесо, аналогично тому, когда позиция переключения коробки передач представляет собой позицию для парковки. Следовательно, необязательно выводить крутящий момент второго мотора. По этой причине, потребление мощности второго мотора может уменьшаться, и в конечном счете, темп потребления мощности может повышаться.
[0021] Согласно вышеуказанной конфигурации, в случае, если имеется запрос на приведение в движение для транспортного средства в ходе управления оценкой коэффициента трения, это управление оценкой прекращается. Таким образом, приоритет отдается запросу на приведение в движение. Например, в ходе управления оценкой коэффициента трения, в случае, если выполняется переключение передач, или транспортное средство переводится в состояние включенного акселератора из остановленного состояния, запрос на приведение в движение может выполняться. По этой причине, в случае, если имеется запрос на приведение в движение, водитель может выполнять комфортное вождение посредством прекращения управления оценкой угла наклона поверхностей зубьев и управления оценкой коэффициента трения.
Краткое описание чертежей
[0022] Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является блок-схемой последовательности операций способа для пояснения примера управления, которое должно выполняться в варианте осуществления;
Фиг. 2 является видом, иллюстрирующим пример зубчатой передачи транспортного средства, на котором монтируется устройство передачи мощности с использованием зацепляющего механизма, связанного с вариантом осуществления;
Фиг. 3 является видом для пояснения примера конфигурации зацепляющего механизма, связанного с вариантом осуществления;
Фиг. 4 является видом в сечении вдоль линии IV-IV зацепляющего механизма на фиг. 3;
Фиг. 5 является видом для пояснения примера конфигурации зубчатого тормоза, связанного с вариантом осуществления, в частности, видом, иллюстрирующим состояние, в котором зубчатый тормоз зацепляется;
Фиг. 6 является временной диаграммой, иллюстрирующей пример изменений скорости транспортного средства, инструкции зацепления в тормозной механизм, значения тока, величины хода зубчатого тормоза, крутящего момента MG1 и величины вращательного перемещения входного вала, в случае, если выполняется пример управления по фиг. 1;
Фиг. 7 является блок-схемой последовательности операций способа для пояснения другого примера управления; и
Фиг. 8 является временной диаграммой, иллюстрирующей пример изменений скорости транспортного средства, инструкции зацепления в тормозной механизм, значения электрического тока, величины хода зубчатого тормоза, крутящего момента MG1, величины вращательного перемещения входного вала и крутящего момента MG2, в случае, если выполняется пример управления по фиг. 7; и
Фиг. 9 является блок-схемой последовательности операций способа для пояснения еще одного другого примера управления.
Подробное описание вариантов осуществления
[0023] Ниже описываются варианты осуществления со ссылкой на чертежи. Фиг. 2 иллюстрирует пример транспортного средства, на котором монтируется устройство передачи мощности с использованием зацепляющего механизма, связанного с вариантом осуществления. Помимо этого, на фиг. 2, взаимосвязь основных электрических соединений проиллюстрирована посредством пунктирных линий. Как проиллюстрировано на фиг. 2, транспортное средство Ve оснащено множеством источников мощности приведения в движение из основного источника 1 мощности, расходуемой на движение, первого мотора 2 (в дальнейшем называемого "MG1") и второго мотора 3 (в дальнейшем называемого "MG2"). В примере, проиллюстрированном на фиг. 2, двигатель (ENG) в качестве основного источника 1 мощности, расходуемой на движение, монтируется на транспортном средстве Ve. Транспортное средство Ve выполнен так, что выходная мощность из основного источника 1 мощности, расходуемой на движение, разделяется и передается в сторону первого мотора 2 и ведущего вала 5 посредством механизма 4 деления мощности. Дополнительно, транспортное средство Ve выполнен так, что мощность, вырабатываемая в первом моторе 2, может подаваться во второй мотор 3, и выходная мощность приведения в движение из второго мотора 3 может добавляться на ведущий вал 5 и ведущее колесо 6.
[0024] Механизм 4 деления мощности представляет собой трансмиссионный механизм, который передает крутящий момент между основным источником 1 мощности, расходуемой на движение, и первым мотором 2 и ведущим колесом 6. Механизм 4 деления мощности состоит из планетарной зубчатой передачи, которая включает в себя солнечную шестерню 7, коронную шестерню 8 и водило 9. В примере, проиллюстрированном на фиг. 2, используется планетарная зубчатая передача односателлитного типа. Коронная шестерня 8, которая представляет собой шестерню внутреннего зацепления, располагается концентрически с солнечной шестерней 7 планетарной зубчатой передачи. Сателлитная шестерня 10, которая вводится в зацепление с солнечной шестерней 7 и коронной шестерней 8, удерживается посредством водила 9 таким образом, что она может вращаться по своей оси и поворачиваться. Помимо этого, солнечная шестерня 7 является примером "первого поворотного элемента". Водило 9 является примером "второго поворотного элемента". Коронная шестерня 8 является примером "третьего поворотного элемента".
[0025] Механизм 4 деления мощности располагается на оси, идентичной оси основного источника 1 мощности, расходуемой на движение, и первого мотора 2. Входной вал 4a механизма 4 деления мощности соединяется с водилом 9 планетарной зубчатой передачи, которая составляет механизм 4 деления мощности. Маховик 11 и выходной вал 1a основного источника 1 мощности, расходуемой на движение, соединяются с входным валом 4a. В частности, выходной вал 1a и входной вал 4a соединяются между собой через демпфирующий механизм 12 и первый ограничитель 13 крутящего момента, которые присоединяются к маховику 11. Следовательно, водило 9 соединяется с выходным валом 1a через входной вал 4a, первый ограничитель 13 крутящего момента, демпфирующий механизм 12 и маховик 11.
[0026] Маховик 11, демпфирующий механизм 12 и первый ограничитель 13 крутящего момента предоставляются между выходным валом 1a и входным валом 4a. Маховик 11 соединяется с выходным валом 1a. Демпфирующий механизм 12 присоединяется к стороне (левой стороне по фиг. 2) маховика 11 напротив основного источника 1 мощности, расходуемой на движение. Демпфирующий механизм 12 выполнен аналогично демпфирующему механизму, который, в общем, используется. Демпфирующий механизм 12 имеет конфигурацию, идентичную конфигурации, например, демпфирующего механизма, описанного в вышеуказанной Международной публикации № WO2013/140527, и выполнен с возможностью подавлять крутильную вибрацию выходного вала 1a, возникающую в результате флуктуации крутящего момента или вибрации основного источника 1 мощности, расходуемой на движение, посредством действия демпфирующей пружины 12a.
[0027] Первый ограничитель 13 крутящего момента предоставляется во внешней периферийной части демпфирующего механизма 12. Первый ограничитель 13 крутящего момента представляет собой механизм для ограничения абсолютной величины крутящего момента, который должен передаваться между ведущим колесом 6 и основным источником 1 мощности, расходуемой на движение. Первый ограничитель 13 крутящего момента выполнен аналогично ограничителю крутящего момента, который, в общем, используется. Например, первый ограничитель 13 крутящего момента выполнен так, что фрикционный диск на стороне выходного вала 1a, которая не проиллюстрирована, и фрикционный диск на стороне входного вала 4a прижимаются друг к другу посредством силы смещения дисковой пружины, и фрикционные диски фрикционно зацепляются друг с другом. Дополнительно, фрикционная сила зацепления между фрикционными дисками определяется согласно силе смещения дисковой пружины. По этой причине, например, значение крутящего момента, ограниченное посредством первого ограничителя 13 крутящего момента, т.е. верхний предел крутящего момента, допускающего передачу через первый ограничитель 13 крутящего момента, задается посредством регулирования жесткости пружины для дисковой пружины.
[0028] Первый мотор 2 соединяется с солнечной шестерней 7 планетарной зубчатой передачи. Первый мотор 2 располагается рядом с механизмом 4 деления мощности и напротив (на левой стороне фиг. 2) основного источника 1 мощности, расходуемой на движение. Вал 2b ротора, который вращается как одно целое с ротором 2a первого мотора 2, соединяется с солнечной шестерней 7. Помимо этого, вал 2b ротора и вращательный вал солнечной шестерни 7 являются полыми валами. Вращательный вал 14a масляного насоса 14 располагается в полых частях вала 2b ротора и вращательного вала солнечной шестерни 7. Таким образом, вращательный вал 14a соединяется с входным валом 4a через вышеуказанные полые части.
[0029] Первая ведущая шестерня 15, которая представляет собой шестерню внешнего зацепления, формируется как одно целое с коронной шестерней 8 во внешней периферийной части коронной шестерни 8 планетарной зубчатой передачи. Дополнительно, обратный вал 16 располагается параллельно оси вращения механизма 4 деления мощности и первого мотора 2. Ведомая шестерня 17 обратного вала, которая вводится в зацепление с вышеуказанной первой ведущей шестерней 15, присоединяется к одной концевой части (правой стороне на фиг. 2) обратного вала 16 таким образом, что она вращается как одно целое с ней. Между тем, ведущая шестерня 18 обратного вала (главная ведущая шестерня) присоединяется к другой концевой части (левой стороне на фиг. 2) обратного вала 16 таким образом, что она вращается как одно целое с обратным валом 16. Ведущая шестерня 18 обратного вала вводится в зацепление с коронной шестерней 20 дифференциала (главной ведомой шестерней) дифференциала 19, которая представляет собой главную ведущую шестерню. Следовательно, коронная шестерня 8 механизма 4 деления мощности соединяется с ведущим валом 5 и ведущим колесом 6 через выходную зубчатую передачу 21, состоящую из первой ведущей шестерни 15, обратного вала 16, ведомой шестерни 17 обратного вала, ведущей шестерни 18 обратного вала и коронной шестерни 20 дифференциала, так что допускается передача мощности в них.
[0030] Устройство передачи мощности транспортного средства Ve выполнен так, что крутящий момент, выводимый из второго мотора 3, может суммироваться с крутящим моментом, который должен передаваться из вышеуказанного механизма 4 деления мощности на ведущий вал 5 и ведущего колеса 6. В частности, вал 3b ротора, который вращается как одно целое с ротором 3a второго мотора 3, располагается параллельно вышеуказанному обратному валу 16. Вторая ведущая шестерня 22, которая вводится в зацепление с вышеуказанной ведомой шестерней 17 обратного вала, присоединяется к верхушке (правому концу на фиг. 2) вала 3b ротора таким образом, что она вращается как одно целое с ним. Следовательно, второй мотор 3 соединяется с коронной шестерней 8 механизма 4 деления мощности через выходную зубчатую передачу 21 и вторую ведущую шестерню 22, как описано выше, так что допускается передача мощности в него. Таким образом, коронная шестерня 8 соединяется с ведущим валом 5 и ведущим колесом 6 через выходную зубчатую передачу 21 со вторым мотором 3, так что допускается передача мощности в него.
[0031] Дополнительно, транспортное средство Ve содержит педаль B тормоза и механизм P блокировки коробки передач на парковке, которые прикладывают тормозной крутящий момент к ведущему колесу 6. Механизм P блокировки коробки передач на парковке зацепляется, например, с вышеуказанной первой ведущей шестерней 15 и стопорит вращение первой ведущей шестерни 15. Транспортное средство Ve содержит рычаг SH переключения передач, который приводит в действие механизм P блокировки коробки передач на парковке. Рычаг SH переключения передач выполнен аналогично рычагу переключения передач, который, в общем, используется. Позиция для парковки, в которой транспортное средство задается в остановленное состояние, позиция заднего хода, в которой транспортное средство приводится в движение задним ходом, позиция нейтрали, в которой передача крутящего момента на ведущее колесо 6 отсекается и т.п., в дополнение к позиции приведения в движение для приведения в движение передним ходом транспортного средства, включены в позицию переключения коробки передач, которая должна выбираться посредством рычага SH переключения передач. Следовательно, когда позиция переключения передач рычага SH переключения передач представляет собой позицию для парковки, вышеуказанный механизм P блокировки коробки передач на парковке работает. Помимо этого, механизм P блокировки коробки передач на парковке и педаль B тормоза являются примером "тормозного механизма". Первая ведущая шестерня 15 является примером "вращающегося тела".
[0032] Кроме того, устройство передачи мощности этого транспортного средства Ve содержит тормозной механизм 23, имеющий функцию стопорения и функцию ограничения. Тормозной механизм 23 состоит из зубчатого тормоза 24 (зацепляющегося тормоза). Функция стопорения в данном документе означает функцию прекращения вращения выходного вала 1a основного источника 1 мощности, расходуемой на движение. Кроме того, функция ограничения означает функцию прекращения застопоренного состояния и подавления перегрузки в устройстве передачи мощности, когда крутящий момент, который действует, превышает верхний предел, даже в случае, если вышеуказанная функция стопорения действует после того, как неподвижный зуб 24a и вращающийся зуб 24b, которые составляют зубчатый тормоз 24, зацепляются друг с другом. Тормозной механизм 23 является примером "зацепляющего механизма".
[0033] В примере, проиллюстрированном на фиг. 2, тормозной механизм 23 предоставляется между первым мотором 2, вторым мотором 3, механизмом 4 деления мощности, картером 25 трансмиссии, который размещает зубчатый тормоз 24 и т.п., входным валом 4a и водилом 9. Дополнительно, как проиллюстрировано на фиг. 3, зубчатый тормоз 24 имеет неподвижный элемент 24c, в котором предоставляется неподвижный зуб 24a, и вращающийся элемент 24d, в котором предоставляется вращающийся зуб 24b, и выполнен так, что неподвижный зуб 24a и вращающийся зуб 24b переводятся в зацепленное состояние и расцепленное состояние посредством неподвижного элемента 24c и вращающегося элемента 24d, относительно подвижного в осевом направлении. Неподвижный зуб 24a и вращающийся зуб 24b являются примером "зацепляющих зубьев". Дополнительно, если не описано конкретно, "осевое направление" показывает направление центральной оси X неподвижного элемента 24c и вращающегося элемента 24d. "Направление вращения" показывает направление вращения, имеющее центральную ось X в качестве центра вращения (см. фиг. 3).
[0034] Неподвижный элемент 24c присоединяется с возможностью перемещения к картеру 25 трансмиссии посредством шлица таким образом, что он является невращающимся и подвижным в осевом направлении (в направлении справа налево на фиг. 3). Дополнительно, неподвижный элемент 24c предоставляется таким образом, что он обращен к вращающемуся элементу 24d в осевом направлении. Вращающийся элемент 24d представляет собой кольцевой элемент и располагается коаксиально с входным валом 4a. Вращающийся элемент 24d присоединяется к входному валу 4a посредством шлица и вращается как одно целое с входным валом 4a. Таким образом, неподвижный элемент 24c и вращающийся элемент 24d выполнены с возможностью быть обращенными друг к другу на идентичной оси, выполнены так, что неподвижный зуб 24a и вращающийся зуб 24b, которые, соответственно, предоставляются на взаимно обращенных поверхностях неподвижного элемента 24c и вращающегося элемента 24d, вводятся в зубчатое зацепление друг с другом и передают крутящий момент.
[0035] Дополнительно, неподвижный зуб 24a и вращающийся зуб 24b, предоставленные в зубчатом тормозе 24, как проиллюстрировано на фиг. 4, состоят, например, из зубьев (или зубьев, имеющих треугольную форму), форма поперечного сечения которых является трапециевидной. Вращающийся зуб 24b формируется таким образом, что длина входного вала 4a в направлении вращения становится небольшой постепенно к верхушке на неподвижном зубе 24a, и при этом неподвижный зуб 24a формируется таким образом, что длина входного вала 4a в направлении вращения постепенно становится небольшой к верхушке на вращающемся зубе 24b. Таким образом, неподвижный зуб 24a и вращающийся зуб 24b формируются таким образом, что они имеют клиновидную форму к взаимно обращенным поверхностям неподвижного элемента 24c и вращающегося элемента 24d, и вращающийся зуб 24b и неподвижный зуб 24a вводятся в зубчатое зацепление друг с другом на наклонных поверхностях.
[0036] В осевом направлении, направление, в котором неподвижное элементе 24c перемещается к вращающемуся элементу 24d, упоминается в качестве" направления зацепления", а направление, противоположное направлению зацепления, упоминается в качестве "направления расцепления". На фиг. 3, направление, которое перемещается от левой стороны к правой стороне, представляет собой направление зацепления, а направление, которое перемещается от правой стороны к левой стороне, представляет собой направление расцепления.
[0037] Электромагнитное исполнительное устройство 26 (в дальнейшем называемое просто "исполнительным устройством") дополнительно предоставляется в тормозном механизме 23. Исполнительное устройство 26 выполнено так, что вышеуказанные зацепляющие зубья, т.е. неподвижный зуб 24a и вращающийся зуб 24b вводятся в зубчатое зацепление друг с другом, и такую конфигурацию, в которой осевое давление формируется в направлении, в котором неподвижный элемент 24c и вращающийся элемент 24d принудительно приближаются друг к другу или в одном направлении. Операция зацепления или расцепления неподвижного зуба 24a и вращающегося зуба 24b приводится в действие посредством исполнительного устройства 26. Исполнительное устройство 26 состоит из подвижного элемента 26a, стационарного элемента 26b, дисковой пружины 26c и катушки 26d. Исполнительное устройство 26 формирует осевое давление Fa, которое прижимает неподвижный элемент 24c к стороне вращающегося элемента 24d, как описано выше на основе этой конфигурации. В нижеприведенном описании, "осевое давление Fa" исполнительного устройства 26 упоминается в качестве "прижимающей силы Fa", которая прижимает неподвижный элемент 24c к стороне вращающегося элемента 24d.
[0038] Подвижный элемент 26a и стационарный элемент 26b располагаются таким образом, что они обращены друг к другу в осевом направлении. На фиг. 3, подвижный элемент 26a располагается слева, а стационарный элемент 26b располагается справа. Дополнительно, дисковая пружина 26c, которая представляет собой возвратную пружину, располагается между подвижным элементом 26a и стационарным элементом 26b. Посредством подачи питания в катушку 26d, подвижный элемент 26a притягивается к стационарному элементу 26b с тем, чтобы сжимать дисковую пружину 26c. Катушка 26d располагается таким образом, что она окружена посредством стационарного элемента 26b. Упругий элемент 27 предоставляется между подвижным элементом 26a и неподвижным элементом 24c в осевом направлении. Упругий элемент 27 выполнен как одно целое с подвижным элементом 26a. Упругий элемент 27 представляет собой возвратную пружину, которая прикладывает нагрузку к подвижному элементу 26a. Упругий элемент 27 выполнен с возможностью прикладывать прижимающую силу Fa вышеуказанного исполнительного устройства 26 против силы сжатия пружины для возвратной пружины. Следовательно, направление прижимающей силы Fa исполнительного устройства 26 представляет собой направление, в котором неподвижный зуб 24a зубчатого тормоза 24 зацепляется с вращающимся зубом 24b. Посредством увеличения прижимающей силы Fa исполнительного устройства 26, неподвижный зуб 24a перемещается в направлении зацепления, в котором неподвижный зуб зацепляется с вращающимся зубом 24b. С другой стороны, посредством уменьшения прижимающей силы Fa исполнительного устройства 26, неподвижный зуб 24a выполнен с возможностью быть отделенным от вращающегося зуба 24b посредством силы сжатия пружины для возвратной пружины. Помимо этого, абсолютная величина прижимающей силы Fa исполнительного устройства 26 варьируется согласно значению тока, который прикладывается к катушке 26d.п
[0039] В тормозном механизме 23 с такой конфигурацией, когда в вышеуказанную катушку 26d подается питание, магнитное поле формируется вокруг катушки 26d. Сила, которая притягивает подвижный элемент 26a в направлении зацепления, формируется вследствие сформированного магнитного поля. Таким образом, подвижный элемент 26a притягивается к стороне стационарного элемента 26b. Когда подвижный элемент 26a притягивается, упругий элемент 27, предоставленный между исполнительным устройством 26 и неподвижным зубом 24a, сжимается, и неподвижный элемент 24c прижимается к стороне вращающегося элемента 24d. Следовательно, вращающийся зуб 24b и неподвижный зуб 24a зацепляются и вводятся в зубчатое зацепление друг с другом. В этом состоянии, когда крутящий момент действует на зацепляющиеся поверхности или контактные поверхности (поверхности зубьев) неподвижного зуба 24a и вращающегося зуба 24b, составляющая сила Fb в осевом направлении формируется, как проиллюстрировано на фиг. 5.
[0040] В случае, если составляющая сила Fb в осевом направлении, вызываемое посредством крутящего момента, передаваемого во вращающийся зуб 24b, меньше прижимающей силы Fa, вызываемой посредством исполнительного устройства 26, зацепленное состояние поддерживается. Следовательно, вращение входного вала 4a и вращение выходного вала 1a и водила 9, соединенных со входным валом 4a, прекращается посредством приведения в действие зубчатого тормоза 24, чтобы зацеплять неподвижный зуб 24a и вращающийся зуб 24b друг с другом. Таким образом, зубчатый тормоз 24 выступает в качестве стопорящего механизма.
[0041] Напротив, в случае, если составляющая сила Fb в осевом направлении, вызываемая посредством крутящего момента, передаваемого во вращающийся зуб 24b, превышает прижимающую силу Fa, вызываемую посредством исполнительного устройства 26, зацепленное состояние прекращается. Таким образом, когда неподвижный элемент 24c и вращающийся элемент 24d относительно отделены друг от друга в осевом направлении посредством осевой силы в осевом направлении, вызываемой на поверхностях зубьев для зацепляющих зубьев (неподвижного зуба 24a и вращающегося зуба 24b), которые вводятся в зубчатое зацепление друг с другом, и зацепление между зацепляющими зубьями прекращается, передача крутящего момента отсекается. Таким образом, в случае, если чрезмерный крутящий момент передается во вращающийся зуб 24b, неподвижный зуб 24a и вращающийся зуб 24b отделены друг от друга, и зацепленное состояние между ними прекращается, и зубчатый тормоз 24 переводится в расцепленное состояние. Соответственно, неподвижный зуб 24a и вращающийся зуб 24b выступают в качестве ограничивающего механизма. Таким образом, зубчатый тормоз 24 выполнен так, что зацепляющие зубья вращающегося элемента 24d и неподвижного элемента 24c вводятся в зубчатое зацепление друг с другом, и передает крутящий момент, и такую конфигурацию, в которой неподвижный элемент 24c и вращающийся элемент 24d отделены друг от друга в осевом направлении, и зацепление между зацепляющими зубьями прекращается, и передача крутящего момента отсекается в случае, если крутящий момент, равный или превышающий верхний предельный крутящий момент, допускающий передачу между неподвижным элементом 24c и вращающимся элементом 24d, вводится во вращающийся элемент 24d.
[0042] Помимо этого, в примере, проиллюстрированном на этом фиг. 3, исполнительное устройство 26 выполнено с возможностью приводить в действие неподвижный элемент 24c и зацеплять неподвижный элемент с вращающимся элементом 24d. Тем не менее, наоборот, исполнительное устройство 26 может быть выполнено с возможностью приводить в действие вращающийся элемент 24d и зацеплять вращающийся элемент с неподвижным элементом 24c.
[0043] Дополнительно, зубчатый тормоз 24 может прикрепляться к задней крышке (не проиллюстрирована) с использованием тормозного механизма ы23 в качестве неразъемного блока. Тормозной механизм 23, который составляет зубчатый тормоз 24, может быть размещен в картере 25 трансмиссии посредством присоединения задней крышки к картеру 25.
[0044] В вышеописанном гибридном транспортном средстве Ve, возможны такие режимы приведения в движение, как гибридный режим приведения в движение (HV-режим) с использованием двигателя 1 в качестве источника питания и режим приведения в движение за счет электрического привода (EV-режим), в котором приведение в движение выполняется посредством приведения в действие первого мотора 2 и второго мотора 3 с помощью мощности устройства накопления мощности (не проиллюстрировано). Задание или переключение таких соответствующих режимов и управление зацеплением или расцеплением вышеуказанного зубчатого тормоза 24 выполняется посредством электронного модуля 28 управления (ECU). ECU 28 выполнен с использованием микрокомпьютера в качестве основного корпуса и выполнен с возможностью осуществлять вычисление с использованием входных данных или данных, заранее сохраненных, и программы и выводить результат вычисления в качестве сигнала команды управления. Входные данные представляют собой скорость транспортного средства, скорость вращения колес транспортного средства, степень открытия акселератора, остаточную величину заряда (SOC) устройства накопления мощности, величину перемещения зубчатого тормоза 24, позицию переключения передач рычага SH переключения передач, величину нажатия педали B тормоза и т.п., и заранее сохраненные данные представляют собой карты, которые определяют соответствующие режимы приведения в движение. ECU 28 выводит сигнал команды управления для запуска или остановки двигателя 1, сигнал команды управления крутящим моментом первого мотора 2, сигнал команды управления крутящим моментом второго мотора 3, сигнал команды управления крутящим моментом двигателя 1, сигнал команды управления электрическим током исполнительного устройства 26 и т.п. в качестве сигналов команд управления. Помимо этого, хотя фиг. 2 иллюстрирует пример, в котором предоставляется один ECU 28, два или более ECU могут предоставляться, например, для каждого устройства, которое должно управляться, или для каждого контента управления.
[0045] В гибридном транспортном средстве Ve, имеющем конфигурацию, как описано выше, функция стопорения и функция ограничения могут становиться совместимыми между собой посредством предоставления зубчатого тормоза 24, как описано выше. Между тем, как описано выше, коэффициент μ трения на контактных поверхностях неподвижного зуба 24a и вращающегося зуба 24b зубчатого тормоза 24 варьируется в зависимости от износа вследствие старения и т.п. В таком случае, возникает такая проблема, что отклонение или ошибка может возникать в коэффициенте μ трения, оцененном с износом вследствие старения, и в конечном счете функция стопорения и функция ограничения могут снижаться. Таким образом, настоящий вариант осуществления выполнен так, что коэффициент μ трения оценивается посредством оценки угла наклона θ поверхностей зубьев, при котором неподвижный зуб 24a и вращающийся зуб 24b вышеуказанного зубчатого тормоза 24 контактируют друг с другом, и прижимающая сила Fa (осевое давление) исполнительного устройства 26 управляется согласно оцененному коэффициенту μ трения. В дальнейшем в этом документе описывается конкретный пример управления, которое должно выполняться посредством ECU 28.
[0046] Фиг. 1 является блок-схемой последовательности операций способа, иллюстрирующей пример управления и, в частности, пример управления для оценки коэффициента μ трения поверхностей зубьев, при котором неподвижный зуб 24a и вращающийся зуб 24b зубчатого тормоза 24 контактируют друг с другом. Это подробно описывается ниже.
[0047] Во-первых, выполняется определение запроса на двухприводный режим приведения в движение (этап S1). Двухприводный режим приведения в движение представляет собой режим приведения в движение за счет электрического привода (режим EV-приведения в движение). Режим приведения в движение за счет электрического привода представляет собой режим, в котором первый мотор 2 и второй мотор 3 приводятся в действие в качестве моторов с помощью мощности устройства накопления мощности, и приведение в движение выполняется с помощью крутящего момента, выводимого из первого мотора 2 и второго мотора 3. На этапе S1, запрос на двухприводный режим приведения в движение определяется из карты и т.п., которая определяется заранее и сохраняется в ECU 28. Затем, определяется то, имеется или не запрос на двухприводный режим приведения в движение (этап S2). На этом этапе S2, в случае, если на этом этапе S2 определяется то, что ответ является отрицательным, т.е. отсутствует запрос на двухприводный режим приведения в движение, этап S1 и этап S2 многократно выполняются до тех пор, пока не определяется то, что имеется запрос на двухприводный режим приведения в движение.
[0048] Наоборот, в случае, если на этапе S2 определяется то, что ответ является положительным, т.е. в случае, если определяется то, что имеется запрос на двухприводный режим приведения в движение, определение запроса на оценку коэффициента μ трения выполняется (этап S3). Определение запроса на оценку коэффициента μ трения, как описано выше, представляет собой запрос на оценку для коэффициента μ трения поверхностей зубьев, при котором неподвижный зуб 24a и вращающийся зуб 24b зубчатого тормоза 24 контактируют друг с другом. При этом определении, определяется то, имеется или нет запрос на оценку коэффициента μ трения (этап S4). В случае, если определяется то, что определение относительно того, имеется или нет запрос на оценку коэффициента μ трения на этом этапе S4, является отрицательным, этап S3 и этап S4 многократно выполняются до тех пор, пока не определяется то, что имеется запрос на оценку коэффициента μ трения. Коэффициент μ трения или угол θ наклона поверхностей зубьев могут варьироваться в зависимости от фазы зацепления зубчатого тормоза 24. Следовательно, при определении запроса на оценку коэффициента μ трения на этом этапе S4, предпочтительно выполнять запрос на оценку коэффициента μ трения каждый раз, когда имеется запрос на двухприводный режим приведения в движение на этапе S2. Следовательно, в случае, если на этом этапе S4 определяется то, что ответ является положительным, т.е. в случае, если определяется то, что имеется запрос на оценку коэффициента μ трения, обработка переходит к этапу S5.
[0049] На этапе S5, определяется то, равна или нет скорость транспортного средства 0. Таким образом, определяется то, находится или нет транспортное средство Ve в остановленном состоянии. Определение относительно того, находится или нет транспортное средство Ve в остановленном состоянии, выполняется, например, посредством датчика скорости вращения колес транспортного средства или кругового датчика позиции MG2, который не проиллюстрирован. В случае, если на этом этапе S5 определяется то, что ответ является отрицательным, т.е. в случае, если скорость транспортного средства=0 не устанавливается, этот этап S5 многократно выполняется до тех пор, пока скорость транспортного средства=0 не будет установлена.
[0050] Наоборот, в случае, если на этом этапе S5 определяется то, что ответ является положительным, т.е. скорость транспортного средства=0 устанавливается, зубчатый тормоз 24 переводится в состояние активации (этап S6).
[0051] Когда зубчатый тормоз 24 переводится во включенное состояние на этом этапе S6, электрический ток отправляется через исполнительное устройство 26, которое прижимает неподвижный элемент 24c, неподвижный элемент 24c перемещается в осевом направлении посредством исполнительного устройства 26, и неподвижный зуб 24a и вращающийся зуб 24b зацепляются друг с другом. Таким образом, прижимающая сила Fa прикладывается к неподвижному элементу 24c и вращающемуся элементу 24d посредством исполнительного устройства 26 таким образом, что зубчатый тормоз 24 зацепляется.
[0052] Затем, определяется то, зацепляется или нет зубчатый тормоз 24, который принимает инструкцию зацепления на этапе S6 (этап S7). В частности, то, завершается или нет зацепление, определяется посредством датчика S хода, присоединенного к зубчатому тормозу 24. В случае, если на этом этапе S7 определяется то, что ответ является отрицательным, т.е. определяется то, что зацепление зубчатого тормоза 24 не завершается, крутящий момент первого мотора 2 выводится, и фаза зубчатого тормоза 24 сдвигается (этап S8). Это служит для сдвига фазы, чтобы зацеплять зубчатый тормоз 24 посредством вывода крутящего момента первого мотора 2, например, поскольку поверхности зубьев неподвижного зуба 24a и вращающегося зуба 24b могут останавливаться в верхних поверхностях. Помимо этого, в случае, если на этом этапе S7 определяется то, что ответ является отрицательным, этап S8 и этап S6 многократно выполняются до тех пор, пока зацепление зубчатого тормоза 24 не будет завершено.
[0053] Наоборот, в случае, если на этом этапе S7 определяется то, что ответ является положительным, т.е. определяется то, что зацепление завершается, электрический ток, прикладываемый на вышеуказанном этапе S6, уменьшается (этап S9). Это обусловлено тем, что зубчатый тормоз 24 не может перемещаться, и оценка коэффициента μ трения не может выполняться, даже если сила притяжения (магнитная сила) катушки 26d исполнительного устройства 26 является слишком сильной с неизменным электрическим током после того, как зацепление зубчатого тормоза 24 завершается, и первый мотор 2 выводит максимальный крутящий момент. Следовательно, зубчатый тормоз 24 легко приводится в действие посредством понижения электрического тока, чтобы понижать вышеуказанную силу притяжения.
[0054] Затем, когда на этапе S7 определено то, что зацепление зубчатого тормоза 24 завершается, и электрический ток уменьшается на этапе S9, крутящий момент первого мотора 2 прикладывается (этап S10). В частности, крутящий момент первого мотора 2 прикладывается в остановленном состоянии транспортного средства Ve и в состоянии завершения зацепления зубчатого тормоза 24. Таким образом, крутящий момент вводится во вращающийся элемент 24d посредством первого мотора 2 таким образом, что неподвижный элемент 24c и вращающийся элемент 24d вызывают осевую силу, с которой эти элементы отделены друг от друга в осевом направлении против прижимающей силы Fa исполнительного устройства 26 на поверхностях зубьев для зацепляющих зубьев. Соответственно, вышеуказанный крутящий момент действует на неподвижный элемент 24c и вращающийся элемент 24d. Помимо этого, крутящий момент при приложении крутящего момента первого мотора 2 может прикладываться с постоянным темпом или с переменным темпом. Первый мотор 2 является примером "входного элемента, в котором крутящий момент вводится во вращающийся элемент", в настоящем варианте осуществления.
[0055] Затем, когда зубчатый тормоз 24 начинает перемещаться посредством приложения крутящего момента первого мотора 2 на этапе S10, обнаруживаются величина α перемещения, в направлении вращения, входного вала 4a, который вращается как одно целое с вращающимся элементом 24d, и величина β перемещения неподвижного элемента 24c в осевом направлении (величина β разделения между неподвижным элементом 24c и вращающимся элементом 24d) (этап S11). Величина α перемещения и величина β перемещения обнаруживаются посредством датчика S хода, присоединенного к зубчатому тормозу 24.
[0056] Затем, угол θ наклона контактных поверхностей (поверхностей зубьев) неподвижного зуба 24a и вращающегося зуба 24b оценивается из величины α перемещения, в направлении вращения, входного вала 4a, который как одно целое вращается с вращающимся элементом 24d, обнаруженным на этапе S11, и величины β перемещения неподвижного элемента 24c в осевом направлении (этап S12). В частности, угол наклона может вычисляться согласно следующему арифметическому выражению.
θ=tan-1(α/β)... (1)
Помимо этого, взаимосвязь между углом θ наклона вышеуказанных поверхностей зубьев, величиной α перемещения и величиной β перемещения проиллюстрирована на фиг. 5.
[0057] Затем на этапе S13 коэффициент μ трения оценивается с использованием значения угла θ наклона поверхностей зубьев, вычисленного на этапе S12. В частности, коэффициент трения вычисляется из угла θ наклона поверхностей зубьев, вычисленного посредством вышеприведенного выражения (1), прижимающей силы Fa, вызываемой посредством исполнительного устройства, крутящего момента T MG1 и радиуса r1 начальной окружности зацепляющих зубьев зубчатого тормоза 24 и радиуса r2 начальной окружности шлица. Когда это упрощается и представляется посредством численного выражения, это может быть показано следующим образом.
Fa=(cosθ-μcosθ/cosθ+μsinθ)Fr1-μFr2... (2)
Помимо этого, что касается коэффициента μ трения относительно Fr1 и Fr2 из вышеприведенного выражения (2), коэффициент μ трения вычисляется как среднее значение или аппроксимация, поскольку μ предположительно является идентичным.
[0058] Затем, когда коэффициент μ трения оценивается на этапе S13, определяется то, завершается или нет оценка оцененного коэффициента μ трения (этап S14). Что касается определения относительно того, завершается или нет оценка коэффициента μ трения, например, предварительно определенное число раз оценки коэффициента μ трения выполняется в процессе, в котором выполняется управление оценкой коэффициента μ трения, описанное на вышеуказанных этапах S10-S13, или определяется то, что оценка завершается, когда варьирования ошибок в данных оцененного коэффициента μ трения находятся в пределах предварительно определенного диапазона. В качестве оценочных данных, используется среднее значение или конечное значение данных, которые оцениваются предварительно определенное число раз. В случае, если на этом этапе S14 определяется то, что ответ является отрицательным, т.е. оценка коэффициента μ трения не завершается, обработка переходит к этапу S15.
[0059] На этом этапе S15, в случае, если определяется то, что управление оценкой коэффициента μ трения не завершается на вышеуказанном этапе S14, определяется то, превышает или нет величина α вращения вращающегося элемента 24d зубчатого тормоза 24 или величина β хода неподвижного элемента 24c предварительно определенное пороговое значение X. Это приводит к такой проблеме, что, например, когда крутящий момент первого мотора 2 продолжает прикладываться, зубчатый тормоз 24 может отскакивать и расцепляться, и может формироваться анормальный шум или толчок. Следовательно, когда предварительно определенная величина хода обнаруживается, определяется то, завершается или нет управление оценкой вышеуказанного коэффициента μ трения. Следовательно, в случае, если на этом этапе S14 определяется то, что ответ является отрицательным, т.е. величина β хода или величина α вращения зубчатого тормоза 24 ниже предварительно определенного порогового значения X, этапы S10-S14 многократно выполняются. С другой стороны, в случае, если на этом этапе S15 определяется то, что ответ является положительным, т.е. величина β хода или величина α вращения зубчатого тормоза 24 превышает предварительно определенное пороговое значение X, крутящий момент первого мотора 2 задается равным 0, так что зубчатый тормоз 24 не отскакивает (этап S16).
[0060] На этом этапе S16, как описано выше, в случае, если на этапе S14 определяется то, что управление оценкой коэффициента μ трения не завершается, и например, величина β хода превышает пороговое значение X на этапе S15, крутящий момент первого мотора 2 сначала задается равным 0, этап S17 и следующие этапы, которые описываются ниже, выполняются, и управление оценкой коэффициента μ трения завершается. Это служит для понижения крутящего момента первого мотора до 0 таким образом, что зубчатый тормоз 24 не отскакивает, как описано выше. Таким образом, в случае, если величина β перемещения, на которую неподвижный элемент 24c и вращающийся элемент 24d отделены друг от друга в осевом направлении, превышает предварительно определенное значение X, крутящий момент первого мотора 2, который должен вводиться во вращающийся элемент 24d, описанный на этапе S10, понижается. Таким образом, крутящий момент, прикладываемый к неподвижному элементу 24c и вращающемуся элементу 24d, понижается. С другой стороны, в случае, если определяется то, что определенный результат является положительным на вышеописанном этапе S14, т.е. также в случае, если управление оценкой коэффициента μ трения завершается, обработка переходит к этапу S16, и крутящий момент первого мотора 2 задается равным 0.
[0061] Затем, определяется то, задан или нет крутящий момент первого мотора 2, выполняемого на этапе S16, равным 0 (этап S17). Таким образом, определяется то, устанавливается или нет крутящий момент MG1=0. В случае, если на этом этапе S17 определяется то, что ответ является отрицательным, т.е. в случае, если крутящий момент MG1=0 не устанавливается, этап S16 многократно выполняется до тех пор, пока крутящий момент MG1=0 не будет установлен.
[0062] Наоборот, в случае, если на этом этапе S17 определяется то, что ответ является положительным, т.е. крутящий момент MG1=0 устанавливается, зубчатый тормоз 24 переводится в деактивированное состояние, т.е. расцепляется (этап S18). Затем зубчатый тормоз 24 переводится в деактивированное состояние посредством управления, выполняемого посредством этапа S17 и этапа S18, и определяется то, завершается или нет расцепление (этап S19). В случае, если на этом этапе S19 определяется то, что ответ является отрицательным, т.е. зубчатый тормоз 24 не расцепляется, этап S18 многократно выполняется до тех пор, пока расцепление не будет завершено. Наоборот, в случае, если определяется то, что зубчатый тормоз 24 расцепляется, управление блок-схемой последовательности операций способа, проиллюстрированной на этом фиг. 1, завершается.
[0063] Фиг. 6 является видом для пояснения временной диаграммы, когда вышеописанный пример управления по фиг. 1, и, в частности, временной диаграммы, иллюстрирующей пример изменений скорости транспортного средства, инструкции зацепления в тормозной механизм 23, значения тока, величины β хода зубчатого тормоза 24, крутящего момента MG1 и величины α вращательного перемещения входного вала, в случае, если выполняется пример управления по фиг. 1.
[0064] Во-первых, как проиллюстрировано на фиг. 6, в момент t1 времени, чтобы оценивать угол θ наклона поверхностей зубьев, которые представляют собой контактные поверхности зубчатого тормоза 24, и коэффициент μ трения, выполняется инструкция зацепления в тормозной механизм 23. Согласно инструкции зацепления в тормозной механизм 23, электрический ток выводится посредством исполнительного устройства 26, и значение электрического тока начинает увеличиваться. Дополнительно, величина β хода зубчатого тормоза 24 начинает увеличиваться.
[0065] Затем, когда зацепление тормозного механизма 23 завершается, как показано на этапе S9, значение электрического тока исполнительного устройства уменьшается (момент t2 времени). Следовательно, управление оценкой коэффициента μ трения начинается в это время. Дополнительно, крутящий момент MG1 прикладывается с этого момента t2 времени. Таким образом, чтобы оценивать угол θ наклона поверхностей зубьев, крутящий момент MG1 постепенно прикладывается. Помимо этого, этот крутящий момент MG1 может представлять собой отрицательный крутящий момент без ограничения положительным крутящим моментом, как проиллюстрировано на фиг. 6.
[0066] Затем, крутящий момент MG1 постепенно увеличивается с момента t2 времени, и зубчатый тормоз 24 начинает перемещаться в сторону расцепления. Таким образом, неподвижный элемент 24c начинает перемещаться в направлении, в котором неподвижный элемент отделен от вращающегося элемента 24d в осевом направлении и входном валу 4a, который вращает как одно целое вращающийся элемент 24d в направлении вращения (момент t3 времени). Затем, величина β перемещения (величина хода) зубчатого тормоза 24 и величины α перемещения в направлении вращения входного вала 4a, который вращается как одно целое с вращающимся элементом 24d, которые описываются на этапе S11, обнаруживаются вследствие вышеуказанного начала перемещения. Затем, как показано на этапе S12 величина α перемещения и величина β перемещения подставляются в вышеприведенное выражение (1), и угол θ наклона поверхности зуба оценивается.
[0067] Затем, коэффициент μ трения оценивается посредством вышеприведенного выражения (2), описанного на этапе S13, с использованием оцененного и полученного угла θ наклона поверхностей зубьев. В частности, коэффициент трения оценивается из угла θ наклона поверхностей зубьев, прижимающей силы Fa, вызываемой посредством исполнительного устройства 26, крутящего момента MG1 T и радиуса r1 начальной окружности зацепляющих зубьев зубчатого тормоза 24 и радиуса r2 начальной окружности шлица.
[0068] Затем когда управление оценкой коэффициента μ трения завершается (момент t4 времени), крутящий момент MG1, прикладываемый с момента t2 времени, снижается до 0 с окончанием управления оценкой. Наряду с этим, снижается величина β хода зубчатого тормоза 24 и величина α перемещения, для направления вращения, вращающегося элемента 24d, который вращается как одно целое с входным валом 4a.
[0069] Затем, когда крутящий момент MG1 задается равным 0, инструкция зацепления в тормозной механизм 23 прекращается, и наряду с этим, значение электрического тока, вызываемое посредством исполнительного устройства 26, также снижается до 0 (момент t5 времени). Затем величина β хода зубчатого тормоза 24 достигает 0, когда значение электрического тока равно 0.
[0070] Таким образом, угол θ наклона поверхностей зубьев на контактных поверхностях неподвижного зуба 24a и вращающегося зуба 24b, которые составляют зубчатый тормоз 24, оценивается, и коэффициент μ трения оценивается с использованием оцененного угла θ наклона поверхностей зубьев. По этой причине, даже если существует индивидуальное различие или износ вследствие старения, угол θ наклона и коэффициент μ трения поверхностей зубьев могут точно оцениваться. Функция стопорения и функция ограничения могут точно становиться совместимыми между собой посредством управления прижимающей силой Fa (осевым давлением) исполнительного устройства 26, т.е. управления электрическим током, который должен прикладываться к катушке 26d, согласно оцененному углу θ наклона и оцененному коэффициенту μ трения.
[0071] В дальнейшем в этом документе описывается другой вариант осуществления. В вышеописанном примере управления по фиг. 1, описана оценка коэффициента μ трения на контактных поверхностях неподвижного зуба 24a и вращающегося зуба 24b зубчатого тормоза 24. В примере, проиллюстрированном на фиг. 7, помимо этого, проиллюстрирован пример, имеющий конфигурацию, в которой вывод MG2 управляется согласно ситуации остановки транспортного средства Ve, например, в случае, если транспортное средство Ve находится в остановленном состоянии посредством ножного тормоза и т.п. в процессе, в котором оценивается коэффициент μ трения. В дальнейшем в этом документе описывается блок-схема последовательности операций способа из примера управления. Помимо этого, этапы, идентичные этапам из вышеописанного примера управления по фиг. 1, обозначаются посредством идентичных ссылок с номерами, и их описание упрощается или исключается.
[0072] Во-первых, этапы S1-S10 являются идентичными этапам S1-S10 вышеуказанного примера управления, и в случае, если коэффициент μ трения оценивается после определения двухприводного режима приведения в движение, зубчатый тормоз 24 зацепляется. Затем после того, как зацепление зубчатого тормоза 24 завершается, значение электрического тока исполнительного устройства 26 уменьшается, и крутящий момент MG1 прикладывается (от этапа S1 до этапа S10).
[0073] Затем, определяется то, находится позиция переключения коробки передач в позиции для парковки, либо транспортное средство Ve находится в остановленном состоянии посредством торможения для удержания на подъеме (этап S101). Эта позиция для парковки означает состояние, в котором позиция переключения коробки передач с диапазоном вождения выбирается в качестве позиции для парковки. Дополнительно, торможение для удержания на подъеме означает, например, функцию торможения для осуществления управления таким образом, что тормозная сила, прикладываемая к ведущему колесу 6, поддерживается (удерживается) как сила, равная или превышающая предварительно определенную тормозную силу в течение нескольких секунд, даже если ножной тормоз отсоединяется, например, в случае, если датчик ускорения и т.п. обнаруживает то, находится или нет транспортное средство Ve на наклоне, и обнаруживает или нет датчик наклон. Таким образом, ведущее колесо 6 стопорится посредством поддержания тормозной силы, которая действует на ведущее колесо 6.
[0074] Следовательно, в случае, если на этом этапе S101 определяется то, что ответ является отрицательным, т.е. транспортное средство Ve находится в остановленном состоянии, отличном от позиции для парковки или тормоза для удержания на подъеме, крутящий момент MG2 выводится (этап S102). Крутящий момент MG1 может передаваться на ведущее колесо 6 посредством тормозной силы, которой передача крутящего момента на ведущее колесо 6 управляется, в случае, если позиция переключения коробки передач представляет собой позицию для парковки, или транспортное средство Ve остановлено посредством способов, отличных от тормоза для удержания на подъеме, например, посредством ножного тормоза. Таим образом, в случае ножного тормоза, срабатывающего на величину нажатия педали B тормоза водителем, крутящий момент вышеуказанного MG1 может передаваться на ведущее колесо 6 в зависимости от рабочей величины ножного тормоза. Следовательно, чтобы предотвращать передачу крутящего момента MG1 на ведущее колесо 6 в ходе управления оценкой коэффициента μ трения, управление выполняется таким образом, что выходной крутящий момент MG2 передается в коронную шестерню 8. В частности, когда коэффициент μ трения поверхностей зубьев оценивается в состоянии, в котором тормозная сила ножного тормоза и т.п. прикладывается, крутящий момент MG1 выводится, и крутящий момент MG2 прикладывается в направлении, противоположном направлению крутящего момента MG1, передаваемого на ведущее колесо 6 посредством вывода крутящего момента MG1. Коротко говоря, выходной крутящий момент MG2 прикладывается в направлении, противоположном направлению выходного крутящего момента MG1. Соответственно, поскольку крутящий момент MG1 может компенсироваться посредством крутящего момента MG2, можно предотвращать перемещение транспортного средства Ve против желания водителя.
[0075] Наоборот, в случае, если на этом этапе S101 определяется то, что ответ является положительным, т.е. позиция переключения коробки передач представляет собой позицию для парковки, т.е. транспортное средство Ve находится в остановленном состоянии в состоянии торможения для удержания на подъеме, угол θ наклона поверхностей зубьев оценивается аналогично вышеописанному этапу S12 по фиг. 1. Таким образом, на этом этапе S101, в случае, если позиция переключения коробки передач представляет собой позицию для парковки, или транспортное средство Ve остановлено посредством тормоза для удержания на подъеме, управление выводом крутящего момента MG2 на вышеуказанном этапе S102 не выполняется. Что касается этого, вращающееся тело (например, первая ведущая шестерня 15) в тракте передачи мощности между коронной шестерней 8 и ведущим колесом 6 стопорится посредством механизма блокировки коробки передач на парковке, в котором позиция переключения коробки передач задается в зависимости от позиции для парковки. Таким образом, поскольку крутящий момент MG1 не передается на ведущее колесо 6 в случае, если позиция переключения коробки передач представляет собой позицию для парковки, необязательно выводить крутящий момент MG2. Аналогично, в случае, если транспортное средство Ve остановлено посредством тормоза для удержания на подъеме, тормозная сила является относительно большой по сравнению с тормозной силой в нормальное время, т.е. тормозная сила, прикладываемая к ведущему колесу 6, поддерживается как сила, равная или превышающая предварительно определенную тормозную силу, крутящий момент MG1 не передается на ведущее колесо 6. Коротко говоря, даже в случае, если транспортное средство Ve остановлено посредством тормоза для удержания на подъеме, и даже в случае, если позиция переключения коробки передач представляет собой позицию для парковки, управление этапом S102 не выполняется аналогично. Другими словами, транспортное средство выполнено с возможностью прекращать управление выводом крутящего момента MG2 на этапе S102.
[0076] Затем обработка переходит к этапу S11 и следующим этапам после этапа S101 или этапа 102, и управление оценкой угла θ наклона поверхностей зубьев и управление оценкой коэффициента μ трения становятся аналогичными вышеуказанному примеру управления по фиг. 1 (от этапа S11 до этапа S19).
[0077] Дополнительно, фиг. 8 является видом, иллюстрирующим временную диаграмму в примере управления по фиг. 7 и временную диаграмму, на которой пример изменений крутящего момента MG2 добавляется на временную диаграмму (фиг. 6) в вышеописанном примере управления по фиг. 1. Следовательно, описание относительно идентичных изменений опускается.
[0078] В частности, крутящий момент постепенно увеличивается таким образом, что выходной крутящий момент MG2 прикладывается в направлении, противоположном выходному крутящему моменту MG1, т.е. крутящий момент MG2 компенсирует силу реакции MG1, и мощность приведения в движение не передается на ведущее колесо 6, с момента t2 времени, когда начинается управление оценкой коэффициента μ трения. Затем крутящий момент MG2 прикладывается до момента t4 времени, когда управление оценкой коэффициента μ трения заканчивается, и крутящий момент MG2 также снижается до 0 с окончанием управления оценкой.
[0079] Далее описывается еще один другой вариант осуществления. В любом из вышеописанных примеров управления, проиллюстрированных на фиг. 1 и 7, управление оценкой коэффициента μ трения выполняется в случае, если транспортное средство Ve находится в остановленном состоянии. Тем не менее, когда управление оценкой коэффициента μ трения выполняется, предусмотрен случай, в котором транспортное средство Ve имеет намерение приводиться в действие вследствие запроса водителя и т.п. Фиг. 9 иллюстрирует пример управления в таком случае. В дальнейшем в этом документе описывается блок-схема последовательности операций способа из этого примера управления. Помимо этого, этапы, идентичные этапам из вышеуказанных примеров управления по фиг. 1 и 7, обозначаются посредством идентичных ссылок с номерами, и их описание упрощается или опускается.
[0080] Во-первых, на этапе S1 и этап S2, определяется то, что выполняется определение двухприводного режима приведения в движение, и определяется то, имеется или нет какой-либо запрос на приведение в движение для транспортного средства Ve, при выполнении управления из любого из этапов S3-S15, этапа S101 и этапа S102 вышеописанных примеров управления по фиг. 1 и 7 (этап S201). Запрос на приведение в движение для транспортного средства Ve водителем определяется посредством этого. В качестве примеров этого определения, предусмотрен случай, в котором позиция переключения коробки передач переключается из позиции для парковки в позицию приведения в движение, случай, в котором степень открытия акселератора является положительной, случай, в котором ножной тормоз находится в деактивированном состоянии, и т.п. Следовательно, в случае, если на этом этапе S201 определяется то, что ответ является отрицательным, т.е. отсутствует операция нажатия педали акселератора и т.п., и отсутствует запрос на приведение в движение транспортного средства, управление выполняется как есть, аналогично блок-схемам последовательности операций способа, проиллюстрированным на фиг. 1 и 7.
[0081] Наоборот, в случае, если на этом этапе S201 определяется то, что ответ является положительным, т.е. имеется запрос на приведение в движение транспортного средства, запрос на оценку коэффициента μ трения отменяется (этап S202). Это не допускает вызывания дискомфорта у водителя посредством предоставления приоритета запросу на приведение в движение водителя в случае, если имеется запрос на приведение в движение в вышеописанном примере определения запроса на приведение в движение и т.п. Дополнительно, поскольку точная оценка угла θ наклона и коэффициента μ трения не может выполняться, даже если управление оценкой коэффициента μ трения выполняется в этом состоянии, запрос на оценку коэффициента μ трения отменяется.
[0082] В частности, в случае, если имеется запрос на приведение в движение при выполнении из любого из этапов S3-S15, этапа S101 и этапа S102, управление при выполнении прекращается, и обработка переходит к этапу S16. Таким образом, крутящий момент MG1 понижается до 0. Затем обработка переходит к этапу S16 и следующим этапам, и зубчатый тормоз 24 расцепляется аналогично вышеуказанным примерам управления по фиг. 1 и 7 (от этапа S16 до этапа S19).
[0083] Помимо этого, в этом примере управления, проиллюстрированном на фиг. 9, проиллюстрирован этап расцепления зубчатого тормоза 24 после отмены запроса на оценку коэффициента μ трения этапа S202. Тем не менее, зацепленное состояние зубчатого тормоза 24 может поддерживаться. Таким образом, управление оценкой коэффициента μ трения может прекращаться посредством запроса водителя, и состояния расцепления и зацепления зубчатого тормоза 24 не имеют значения.
[0084] Таким образом, в любом из вышеописанных вариантов осуществления, угол θ наклона поверхностей зубьев на контактных поверхностях неподвижного зуба 24a и вращающегося зуба 24b, которые составляют зубчатый тормоз 24, оценивается, и коэффициент μ трения оценивается с использованием оцененного угла θ наклона поверхностей зубьев. Следовательно, согласно этому изобретению, угол θ наклона и коэффициент μ трения поверхностей зубьев могут точно оцениваться, и функция стопорения и функция ограничения могут становиться точно совместимыми между собой посредством управления прижимающей силой Fa (осевым давлением) исполнительного устройства 26 согласно оцененному углу θ наклона и оцененному коэффициенту μ трения. Кроме того, темп потребления мощности может повышаться посредством управления крутящим моментом MG2 согласно остановленному состоянию транспортного средства Ve. В случае, если имеется запрос на приведение в движение водителя, дискомфорт у водителя может не допускаться посредством предоставления приоритета запросу на приведение в движение.
[0085] Хотя выше описано множество вариантов осуществления этого изобретения, это изобретение не ограничено вышеописанными примерами и может надлежащим образом изменяться в пределах диапазона, в котором достигается задача этого изобретения. Например, в любом из вышеописанных соответствующих вариантов осуществления, после того, как зубчатый тормоз 24 зацепляется, зубчатый тормоз 24 принудительно проскальзывает на стороне расцепления посредством приложения крутящего момента MG1. Таким образом, неподвижный элемент 24c и вращающийся элемент 24d отделены друг от друга, и угол θ наклона и коэффициент μ трения поверхностей зубьев неподвижного зуба 24a и вращающегося зуба 24b оцениваются из величины β разделения и величины α вращения вращающегося элемента 24d. Напротив, угол θ наклона поверхностей зубьев может оцениваться посредством принудительного проскальзывания зубчатого тормоза 24 в сторону зацепления вместо операции принудительного проскальзывания зубчатого тормоза 24 в сторону расцепления. В таком случае, вышеуказанное управление выполняется из состояния, в котором неподвижный зуб 24a и вращающийся зуб 24b не полностью зацепляются друг с другом. Например, после того, как неподвижный зуб 24a и вращающийся зуб 24b зубчатого тормоза начинают вводиться в зубчатое зацепление друг с другом, зубчатый тормоз 24 перемещается в сторону зацепления, и угол θ наклона и коэффициент μ трения поверхности зубьев для неподвижного зуба 24a и вращающегося зуба 24b оцениваются аналогично случаю на стороне расцепления, из величины β перемещения и величины α вращения вращающегося элемента 24d. Таким образом, зубчатый тормоз 24 принудительно проскальзывает на стороне зацепления, угол θ наклона поверхностей зубьев оценивается из величины перемещения, и коэффициент μ трения оценивается из угла θ наклона поверхностей зубьев. Затем прижимающая сила Fa (осевое давление) исполнительного устройства 26 управляется согласно оцененному углу θ наклона и оцененному коэффициенту μ трения.
[0086] Дополнительно, в вышеописанных соответствующих вариантах осуществления, приводится описание с использованием транспортного средства Ve, в котором вал 2b ротора первого мотора 2 и вал 3b ротора второго мотора 3, как описано на фиг. 2, располагаются параллельно, в качестве цели. Напротив, устройство передачи мощности в транспортном средстве Ve также может применяться, например, к гибридному транспортному средству Ve (не проиллюстрировано), в котором вал 2b ротора первого мотора 2 и вал 3b ротора второго мотора 3 располагаются на идентичной оси.
[0087] Кроме того, в любом из вышеописанных соответствующих вариантов осуществления, проиллюстрирована конфигурация, в которой двигатель монтируется на основном источнике 1 мощности, расходуемой на движение, транспортного средства Ve. Таким образом, проиллюстрирован пример, в котором транспортное средство Ve представляет собой гибридное транспортное средство, оснащенное двигателем с первым мотором 2 и вторым мотором 3 в качестве источников мощности приведения в движение. Напротив, устройство передачи мощности в этом транспортном средстве Ve также может применяться, например, к транспортному средству Ve (не проиллюстрировано), оснащенному мотором в качестве основного источника 1 мощности, расходуемой на движение. Таким образом, устройство передачи мощности также может применяться к электрическому автомобилю, оснащенному тремя наборами моторов вместе с первым мотором 2 и вторым мотором 3, в качестве источников мощности приведения в движение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления для транспортного средства с электрическим приводом | 2016 |
|
RU2655575C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГЕНЕРИРОВАНИЕМ МОЩНОСТИ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2660326C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ УСТРОЙСТВА ПЕРЕДАЧИ ДИНАМИЧЕСКОЙ МОЩНОСТИ | 2016 |
|
RU2625813C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМОБИЛЕМ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2017 |
|
RU2677425C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2518144C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖУЩЕЙ СИЛОЙ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2657625C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРОГАНИЕМ С МЕСТА ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2657587C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГЕНЕРИРОВАНИЕМ МОЩНОСТИ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2670557C1 |
| УСТРОЙСТВО ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2585501C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2646780C2 |

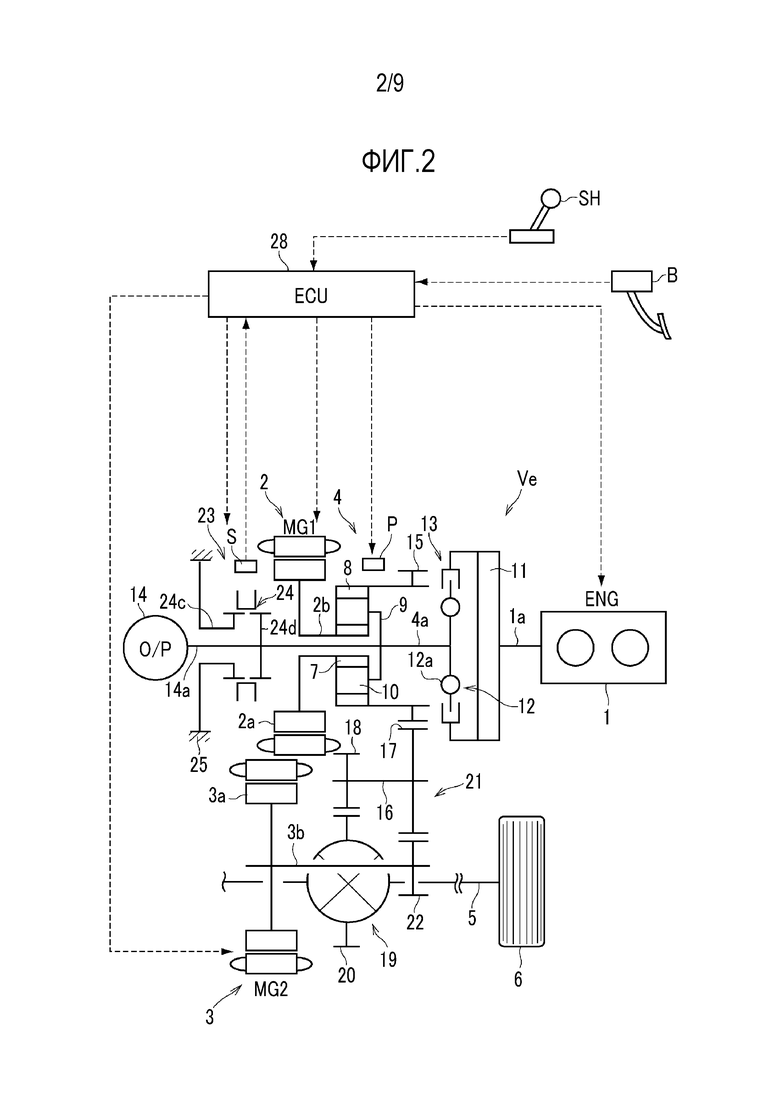
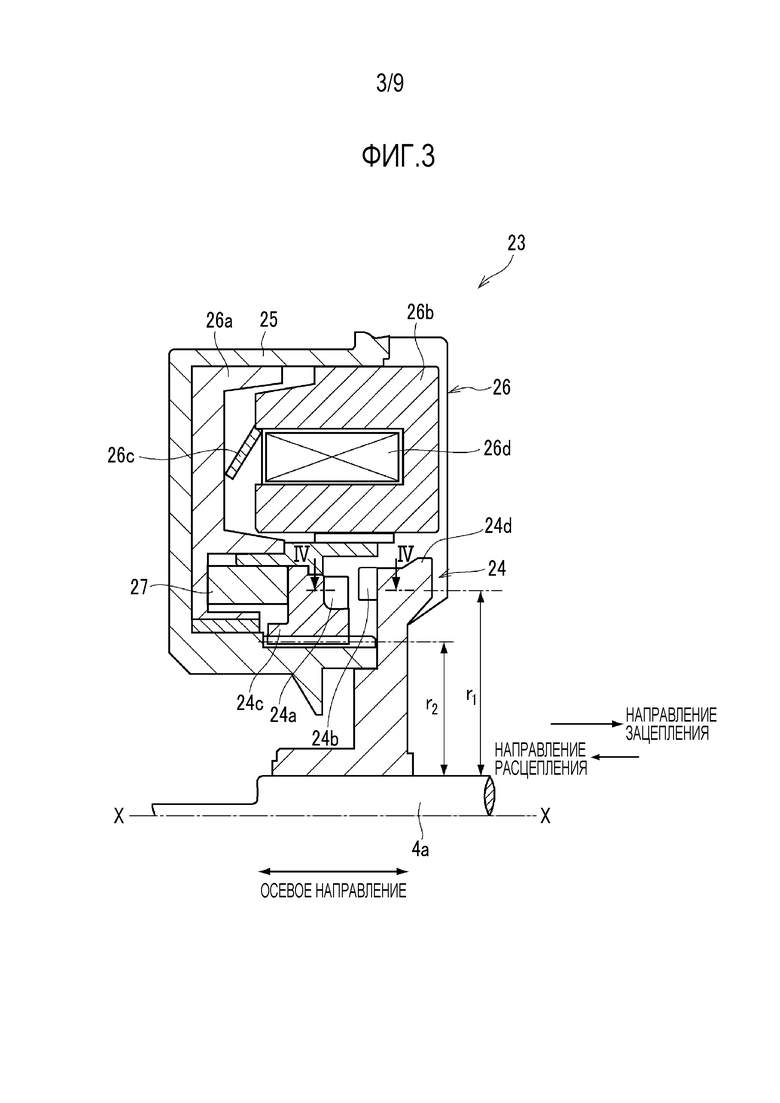
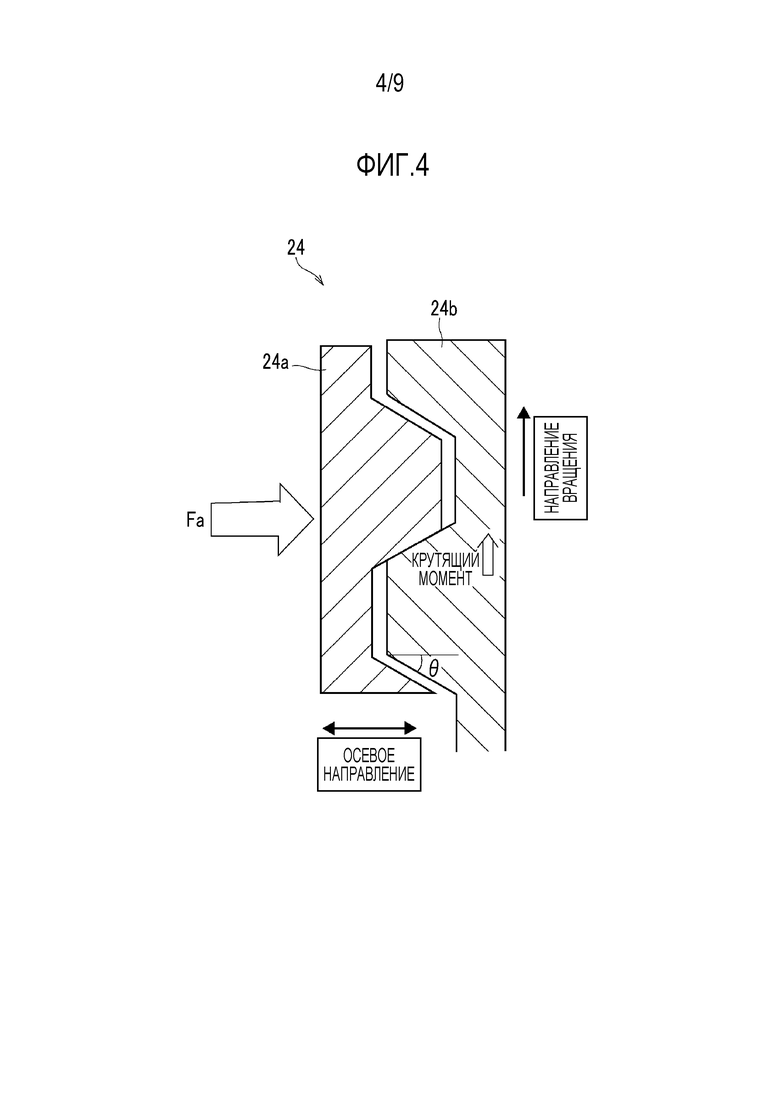
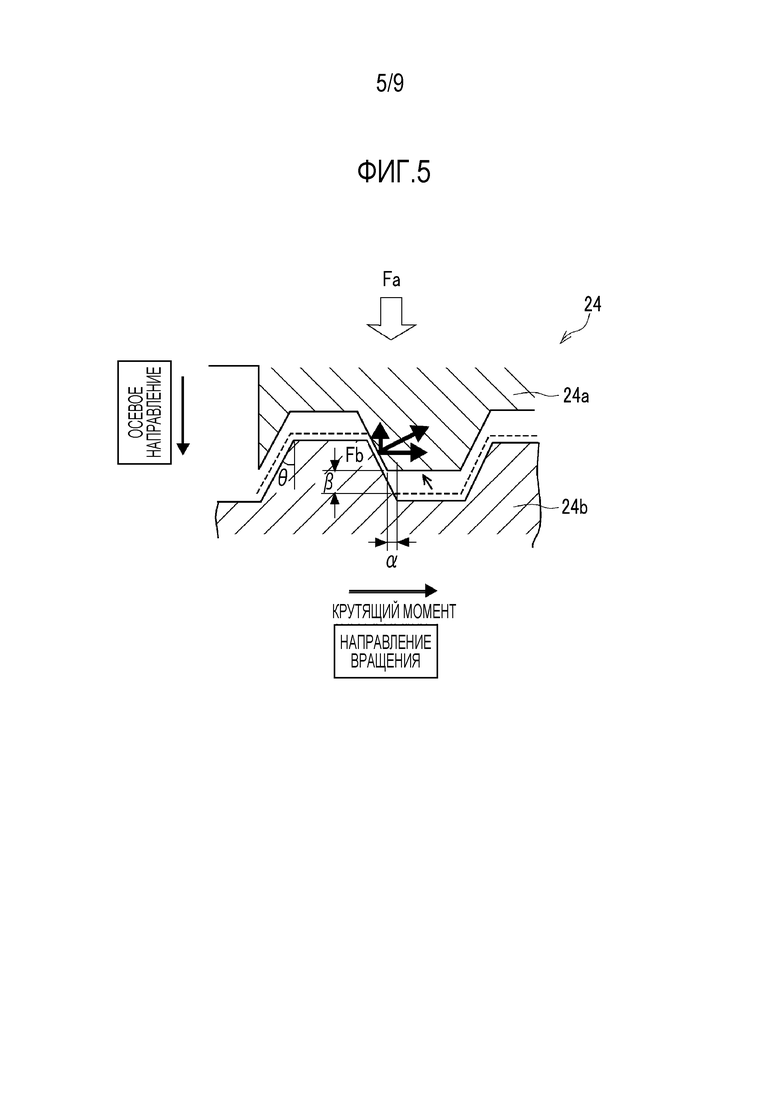
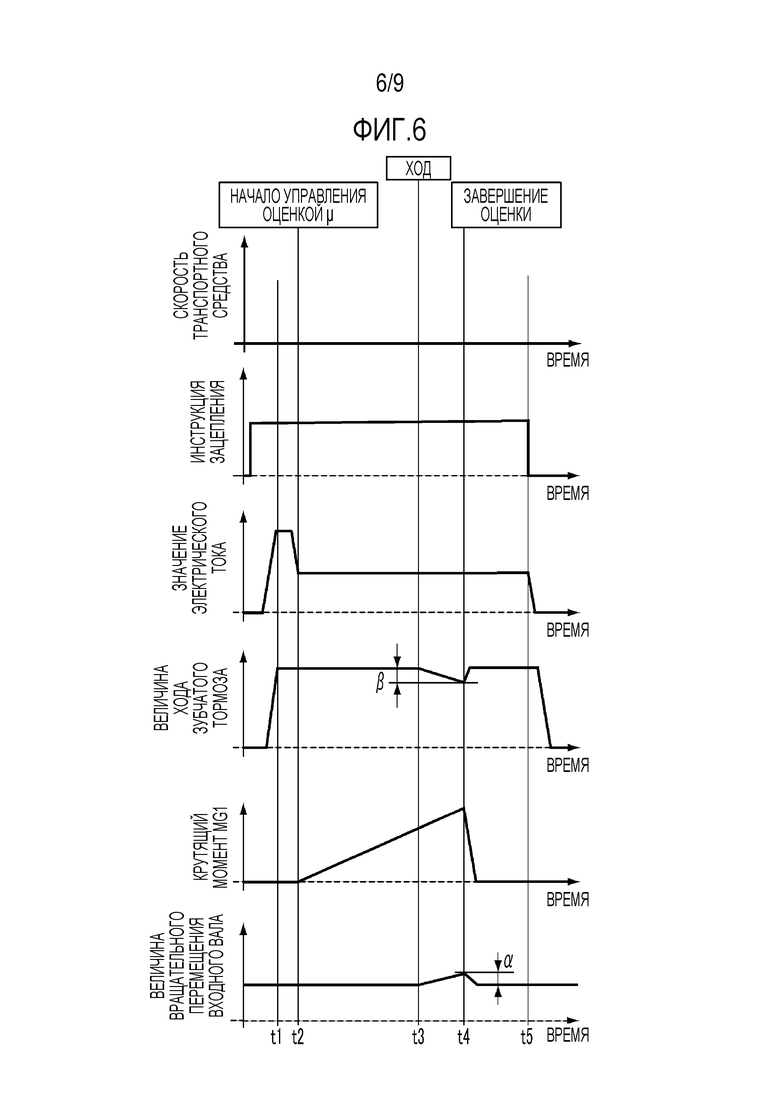
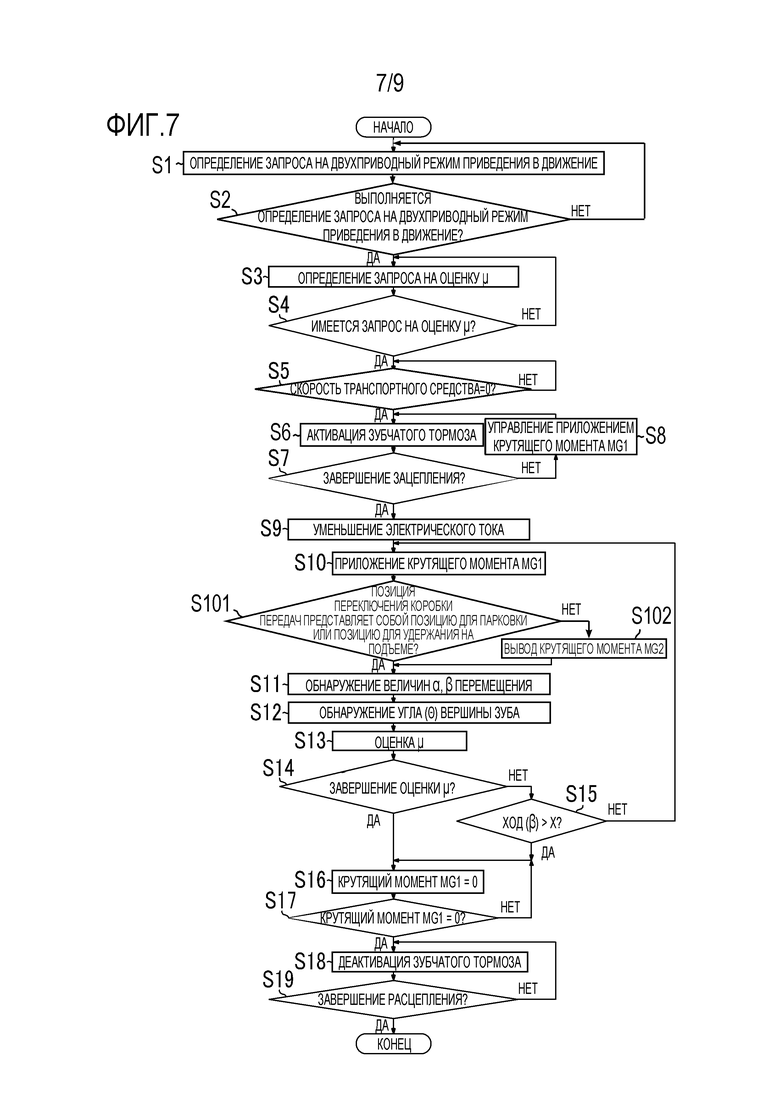
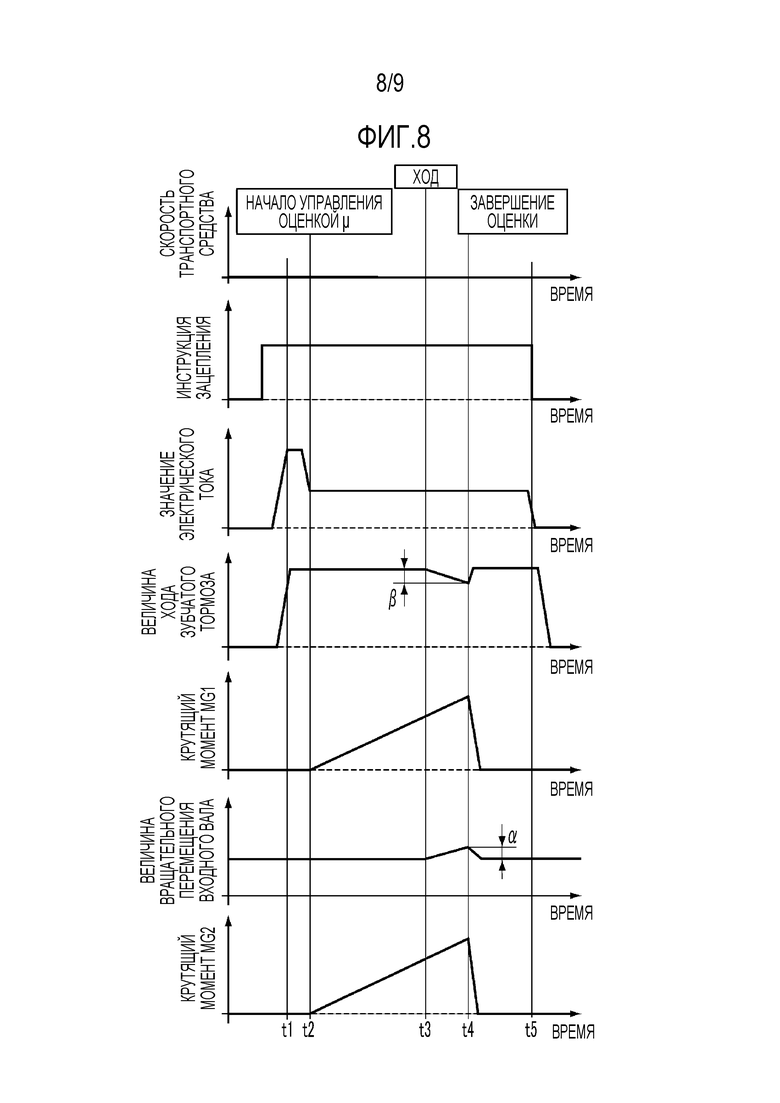
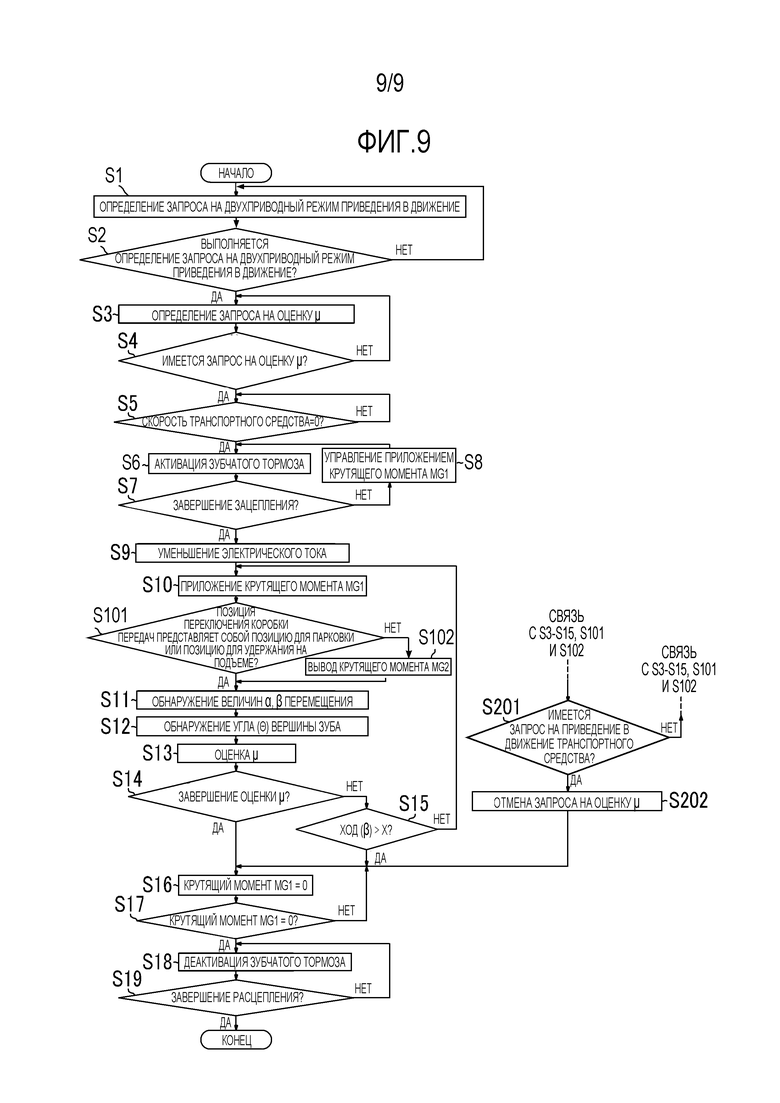
Изобретение относится к транспортным средствам. Устройство управления зацепляющим механизмом транспортного средства содержит электронный модуль управления крутящим моментом входного элемента таким образом, что он действует на неподвижный элемент и вращающийся элемент, так что неподвижный элемент и вращающийся элемент отделены друг от друга в осевом направлении посредством входного элемента, когда осевое давление прикладывается к одному из неподвижного элемента и вращающегося элемента посредством исполнительного устройства, с тем чтобы заставлять зацепляющие зубья вводиться в зубчатое зацепление друг с другом. Модуль управления оценивает угол наклона поверхностей зубьев на основе величины относительного перемещения в осевом направлении между неподвижным элементом и вращающимся элементом и величины относительного вращения между неподвижным элементом и вращающимся элементом, оценивает коэффициент трения поверхностей зубьев на основе угла наклона и управляет осевым давлением исполнительного устройства согласно коэффициенту трения. Запрещается чрезмерный крутящий момент. 2 н. и 6 з.п. ф-лы, 9 ил.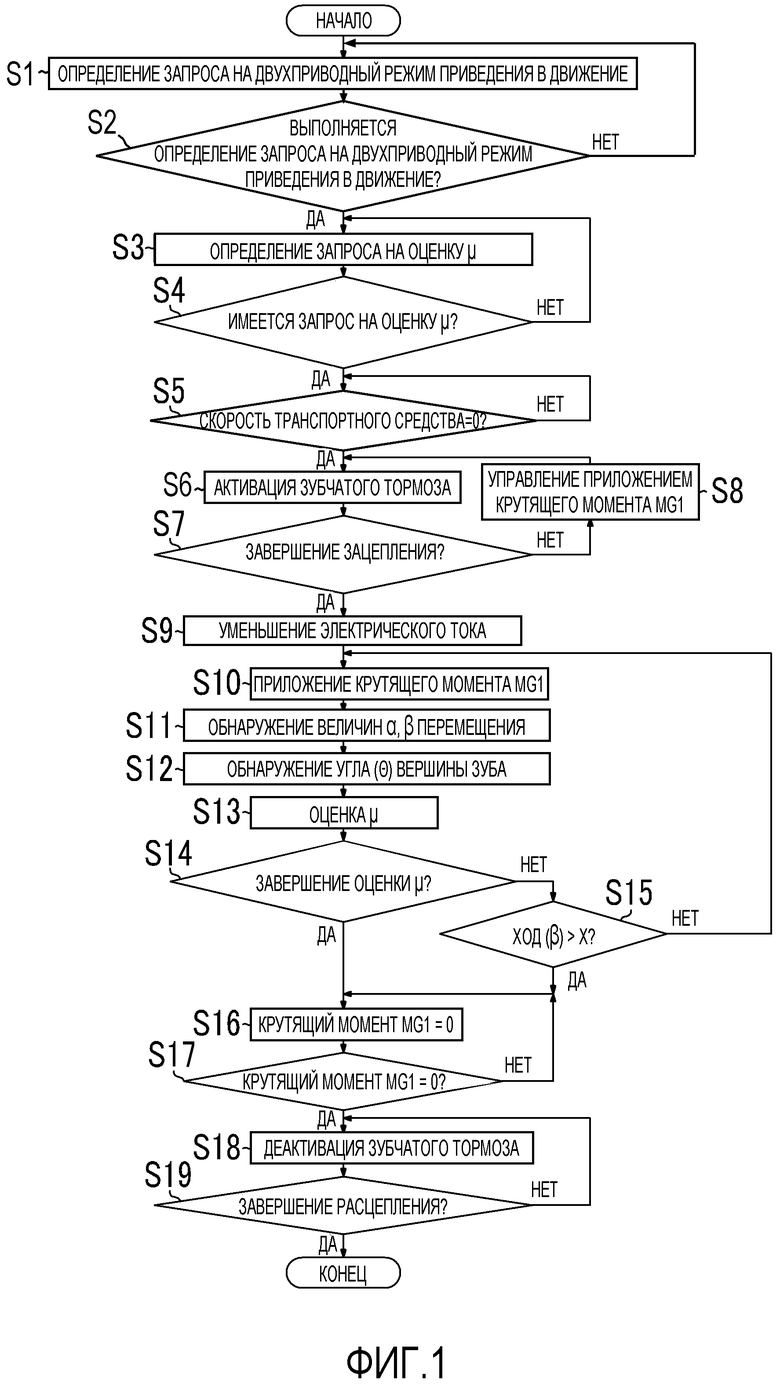
1. Устройство управления зацепляющим механизмом транспортного средства,
- при этом транспортное средство включает в себя зацепляющий механизм,
- при этом зацепляющий механизм включает в себя неподвижный элемент, вращающийся элемент, зацепляющие зубья, исполнительное устройство и входной элемент,
- при этом вращающийся элемент располагается таким образом, что он обращен к неподвижному элементу на оси, идентичной оси неподвижного элемента,
- при этом неподвижный элемент и вращающийся элемент выполнены с возможностью вводиться в зубчатое зацепление друг с другом, чтобы передавать крутящий момент,
- при этом неподвижный элемент и вращающийся элемент выполнены с возможностью быть отделенными относительно друг друга в осевом направлении таким образом, что ввод в зацепление между зацепляющими зубьями прекращается, и передача крутящего момента отсекается, когда крутящий момент, равный или превышающий верхний предельный крутящий момент, допускающий передачу между неподвижным элементом и вращающимся элементом, вводится во вращающийся элемент,
- при этом зацепляющие зубья, соответственно, предоставляются на взаимно обращенных поверхностях неподвижного элемента и вращающегося элемента, и зацепляющие зубья имеют формы, которые являются клиновидными к взаимно обращенным поверхностям,
- при этом исполнительное устройство выполнено с возможностью формировать осевое давление в направлении, в котором неподвижный элемент и вращающийся элемент принудительно приближаются друг к другу таким образом, что зацепляющие зубья вводятся в зубчатое зацепление друг с другом, и
- при этом входной элемент выполнен так, что крутящий момент вводится во вращающийся элемент, причем устройство управления содержит:
- электронный модуль управления, выполненный с возможностью:
- управлять крутящим моментом входного элемента таким образом, что он действует на неподвижный элемент и вращающийся элемент, так что неподвижный элемент и вращающийся элемент отделены друг от друга в осевом направлении посредством входного элемента, когда осевое давление прикладывается по меньшей мере к одному из неподвижного элемента и вращающегося элемента посредством исполнительного устройства, с тем чтобы заставлять зацепляющие зубья вводиться в зубчатое зацепление друг с другом;
- оценивать угол наклона поверхностей зубьев на основе величины относительного перемещения в осевом направлении между неподвижным элементом и вращающимся элементом и величины относительного вращения между неподвижным элементом и вращающимся элементом;
- оценивать коэффициент трения поверхностей зубьев на основе угла наклона; и
- управлять осевым давлением исполнительного устройства согласно коэффициенту трения.
2. Устройство управления по п. 1,
- в котором электронный модуль управления выполнен с возможностью оценивать коэффициент трения на основе оцененного угла наклона поверхностей зубьев, осевого давления, сформированного посредством исполнительного устройства, и крутящего момента, действующего на неподвижный элемент и вращающийся элемент.
3. Устройство управления по п. 1 или 2,
- в котором электронный модуль управления выполнен с возможностью понижать крутящий момент, действующий на неподвижный элемент и вращающийся элемент, когда величина относительного перемещения в осевом направлении между неподвижным элементом и вращающимся элементом превышает предварительно определенное значение.
4. Устройство управления по п. 1 или 2,
- в котором транспортное средство дополнительно включает в себя планетарную зубчатую передачу, ведущее колесо, тормозной механизм, первый мотор и второй мотор,
- планетарная зубчатая передача включает в себя по меньшей мере три поворотных элемента из первого поворотного элемента, с которым соединяется первый мотор, второго поворотного элемента, с которым соединяется вращающийся элемент, и третьего поворотного элемента, соединенного с ведущим колесом,
- тормозной механизм выполнен с возможностью прикладывать тормозной крутящий момент к ведущему колесу,
- второй мотор соединяется с трактом передачи мощности между ведущим колесом и третьим поворотным элементом,
- при этом электронный модуль управления выполнен с возможностью оценивать коэффициент трения, когда крутящий момент из первого мотора выводится, в то время как тормозной крутящий момент прикладывается к ведущему колесу посредством тормозного механизма, и
- электронный модуль управления выполнен с возможностью управлять выходным крутящим моментом второго мотора таким образом, что крутящий момент, противоположный крутящему моменту, передаваемому в третий поворотный элемент, передается в третий поворотный элемент посредством вывода крутящего момента из первого мотора, когда электронный модуль управления оценивает коэффициент трения.
5. Устройство управления по п. 4,
- в котором тормозной механизм представляет собой механизм блокировки коробки передач на парковке, выполненный с возможностью стопорить вращающееся тело в тракте передачи мощности между третьим поворотным элементом и ведущим колесом, и
- электронный модуль управления выполнен с возможностью прекращать управление выходным крутящим моментом второго мотора, когда позиция переключения коробки передач представляет собой позицию для парковки, в которой механизм блокировки коробки передач на парковке приводится в действие.
6. Устройство управления по п. 4,
- в котором электронный модуль управления выполнен с возможностью осуществлять управление тормозом для удержания на подъеме для поддержания тормозной силы, прикладываемой к ведущему колесу посредством тормозного механизма, равной предварительно определенной тормозной силе или выше, и
- электронный модуль управления выполнен с возможностью прекращать управление выходным крутящим моментом второго мотора, когда выполняется управление тормозом для удержания на подъеме.
7. Устройство управления по любому из пп. 1, 2, 5 или 6,
- в котором электронный модуль управления выполнен с возможностью прекращать управление оценкой коэффициента трения, когда запрос на приведение в движение для транспортного средства требуется в ходе выполнения управления для оценки коэффициента трения.
8. Способ управления зацепляющим механизмом транспортного средства,
- при этом транспортное средство включает в себя зацепляющий механизм,
- при этом зацепляющий механизм включает в себя неподвижный элемент, вращающийся элемент, зацепляющие зубья, исполнительное устройство и входной элемент,
- при этом вращающийся элемент располагается таким образом, что он обращен к неподвижному элементу на оси, идентичной оси неподвижного элемента,
- при этом неподвижный элемент и вращающийся элемент выполнены с возможностью вводиться в зубчатое зацепление друг с другом, чтобы передавать крутящий момент,
- при этом неподвижный элемент и вращающийся элемент выполнены с возможностью быть отделенными относительно друг друга в осевом направлении таким образом, что ввод в зацепление между зацепляющими зубьями прекращается, и передача крутящего момента отсекается, когда крутящий момент, равный или превышающий верхний предельный крутящий момент, допускающий передачу между неподвижным элементом и вращающимся элементом, вводится во вращающийся элемент,
- при этом зацепляющие зубья, соответственно, предоставляются на взаимно обращенных поверхностях неподвижного элемента и вращающегося элемента, и зацепляющие зубья имеют формы, которые являются клиновидными к взаимно обращенным поверхностям,
- при этом исполнительное устройство выполнено с возможностью формировать осевое давление в направлении, в котором неподвижный элемент и вращающийся элемент принудительно приближаются друг к другу таким образом, что зацепляющие зубья вводятся в зубчатое зацепление друг с другом, и
- при этом входной элемент выполнен так, что крутящий момент вводится во вращающийся элемент,
- при этом способ управления содержит этапы, на которых:
- прикладывают крутящий момент входного элемента к неподвижному элементу и вращающемуся элементу таким образом, что неподвижный элемент и вращающийся элемент отделены друг от друга в осевом направлении посредством входного элемента, когда осевое давление прикладывается по меньшей мере к одному из неподвижного элемента и вращающегося элемента посредством исполнительного устройства, с тем чтобы заставлять зацепляющие зубья вводиться в зубчатое зацепление друг с другом;
- оценивают угол наклона поверхностей зубьев на основе величины относительного перемещения в осевом направлении между неподвижным элементом и вращающимся элементом и величины относительного вращения между неподвижным элементом и вращающимся элементом;
- оценивают коэффициент трения поверхностей зубьев на основе угла наклона; и
- управляют осевым давлением исполнительного устройства согласно коэффициенту трения.
| WO 2016001747 A1, 07.01.2016 | |||
| GB 1217159 A, 31.12.1970 | |||
| EP 2977633 A1, 27.01.2016 | |||
| JP 2009120043 A, 04.06.2009 | |||
| ПРИВОД МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ | 1990 |
|
RU2016816C1 |
| ПРЯМОЗУБАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 1999 |
|
RU2160403C1 |

