ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Изобретение касается стола для пациента, содержащего систему позиционирования. Кроме того, изобретение касается способов использования такого стола для пациента, схемы получения рентгеновских изображений, включающей в себя такой стол для пациента, элемента компьютерной программы, выполненного с возможностью управления способом использования такого стола для пациента, а также читаемой компьютером среды, в которой хранится такой элемент компьютерной программы.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Устройства для получения рентгеновских изображений разработаны для применения в различных областях медицины. Путем эмиссии рентгеновских лучей от источника рентгеновского излучения в направлении исследуемого объекта, такого как часть организма пациента, и детектирования частично прошедших рентгеновских лучей на противоположной стороне объекта можно получить изображение объекта, показывающее его внутреннюю структуру, благодаря различающимся характеристикам поглощения рентгеновского излучения, например, различных типов тканей пациента, таких как кости, мышцы и т.д.
Например, были разработаны рентгеновские системы с C-образной рамой, содержащие источник рентгеновского излучения на одном конце C-образной рамы и детектор рентгеновского излучения на противоположном конце C-образной рамы. C-образная рама может перемещаться в различных направлениях, в направлении поступательного движения и/или направлении вращательного движения, так что изображения объекта могут быть получены при самых разнообразных ориентационных положениях.
В одной конкретной области применения может быть получено множество двумерных рентгеновских изображений под разными углами наблюдения, после чего из этого множества двумерных рентгеновских изображений может быть реконструировано трехмерное изображение. Такое трехмерное рентгеновское изображение, например, может помочь врачу визуализировать исследуемую область организма пациента. Трехмерное изображение может быть отображено для врача на экране в различных ориентационных положениях или на различных срезах. Например, выведение на экран такого трехмерного изображения может помочь врачу при проведении хирургической операции. В процессе такого хирургического вмешательства могут быть получены дополнительные рентгеновские изображения, которые можно сравнивать с рентгеновскими изображениями, полученными до проведения интервенционной процедуры, или осуществлять наложение изображений.
В многочисленных клинических приложениях может оказаться важным знать пространственное соотношение между исследуемой областью организма пациента и полученным рентгеновским изображением. Например, чтобы можно было легко сравнить рентгеновские изображения, полученные до проведения интервенционной процедуры, с рентгеновскими изображениями, полученными в процессе хирургического вмешательства, может понадобиться получить оба типа изображений в одном и том же положении и при одной и той же ориентации устройства для получения рентгеновских изображений относительно исследуемой области.
Одной из возможных областей применения рентгеновской визуализации является 3D-картирование. В рамках такой технологии натуральное 2D-рентгеновское изображение и 3D-реконструкция могут быть объединены в единый процесс визуализации. 3D-данные в отношении ориентации, местоположения и пространственной перспективы могут быть сопряжены с текущим ориентационным расположением системы с C-образной рамой, так чтобы выполнить наложение содержимого 2D-данных и 3D-данных. Данная технология может помочь сэкономить контрастное вещество, поскольку 3D-реконструкция уже показывает сосудистый объем в исследуемой области организма пациента. Кроме того, она может придать дополнительную уверенность в процессе проведения процедуры, в особенности в случае сложных васкулярных структур, когда трехмерное изображение ясно показывает морфологию сосудов.
Чтобы предоставить возможность не только перемещать устройство для получения рентгеновских изображений, такое как система с C-образной рамой, относительно пациента, но также перемещать самого пациента, например в ходе хирургического вмешательства, разработаны столы для пациентов, содержащие панель стола, на которой может размещаться пациент, способную перемещаться относительно неподвижно стоящего на полу основания стола. Предпочтительно такие столы для пациентов содержат приводы, которыми можно управлять для активного перемещения панели стола относительно основания стола. Например, панель стола может поступательно перемещаться, совершать поворот или наклон относительно основания стола. Для обеспечения подобных различных перемещений панель стола может соединяться с основанием стола посредством по меньшей мере одного подвижного соединения.
Предпочтительно стол для пациента выполнен с возможностью детектирования действительного положения панели стола путем сбора данных позиционирования по меньшей мере, этого одного подвижного соединения. Например, можно замерить положение или угол расположения шарнира и/или опоры, входящих в состав соединения, и из таких данных позиционирования рассчитать действительное местоположение и/или ориентационное положение панели стола. Разумеется, стол для пациента может содержать более одного подвижного соединения, при этом данные о положении могут быть получены на основании множества замеренных значений положения и/или значений угла.
Были разработаны системы автоматического управления позиционированием, позволяющие «запоминать» и воспроизводить ориентационное расположение геометрической конструкции. Это может быть реализовано как в отношении геометрии C-образной рамы, так и геометрии стола для пациента. Традиционно это может выполняться путем «запоминания» механического положения одного или нескольких подвижных соединений, входящих в состав системы с C-образной рамой или стола для пациента соответственно.
Однако замечено, что использование традиционных систем автоматического управления позиционированием не всегда дает удовлетворительные результаты позиционирования.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Соответственно может возникнуть потребность в схеме получения рентгеновских изображений, а также способе использования такой схемы, в которой позиционирование исследуемой области относительно устройства для получения рентгеновских изображений можно надежно улучшить.
Эта потребность может быть удовлетворена путем создания стола для пациента, способа использования такого стола для пациента, схемы получения рентгеновских изображений, элемента компьютерной программы, а также читаемой компьютером среды по прилагаемым независимым пунктам формулы изобретения. Предпочтительные варианты осуществления определены в зависимых пунктах формулы изобретения.
Объекты и варианты осуществления настоящего изобретения разработаны на основе следующего заключения: во многих процедурах для получения рентгеновских изображений пространственное соотношение между источником рентгеновского излучения и детектором рентгеновского излучения, установленными, например, на системе с C-образной рамой, и абсолютной системой координат может быть четко установлена посредством измерения механических углов и калибровок. Однако может оказаться, что соотношение между абсолютной системой координат и панелью стола для пациента, на которой может располагаться обследуемый пациент, установить сложнее, например, в силу невоспроизводимого поведения системы позиционирования стола для пациента. Такое невоспроизводимое поведение может быть вызвано, например, различиями в распределении веса по панели стола в результате, например, перемещения пациента в процессе проведения операции, или в результате того, что хирург обопрется на панель стола в ходе операции. Соответственно обнаружено, что хотя на стол для пациента были поданы команды, чтобы восстановить конкретное положение панели стола, идентичное положению панели стола при проведении предшествующей процедуры получения изображений, путем подачи команд на приводы стола для пациента по восстановлению тех же механических углов/положений подвижных соединений, положение панели стола, которое в действительности реализуется, может отличаться от положения панели стола, занимаемого в ходе предшествующей процедуры получения изображений. Соответственно могут возникнуть сложности при сравнении рентгеновских изображений, полученных в ходе предшествующего и последующего получения рентгеновских изображений. Или, как в примере 3D-картирования, совмещение полученных фактических 2D-рентгеновских изображений с реконструированным ранее 3D-изображением может давать неудовлетворительные результаты.
Согласно первому аспекту изобретения предложен стол для пациента, содержащий систему позиционирования. Стол для пациента содержит панель стола, соединенную с основанием стола посредством по меньшей мере одного подвижного соединения, при этом панель стола способна перемещаться с использованием по меньшей мере одного привода. Система позиционирования содержит первую сенсорную схему для предоставления данных позиционирования по меньшей мере одного подвижного соединения. Кроме того, система позиционирования содержит вторую сенсорную схему для предоставления данных позиционирования панели стола.
Согласно второму аспекту изобретения предложен способ использования стола для пациента по первому аспекту. Способ используется для автоматического позиционирования стола для пациента и содержит следующие этапы:
a) получение исходных первых данных позиционирования по меньшей мере одного подвижного соединения с использованием первой сенсорной схемы;
b) получение исходных вторых данных позиционирования панели стола с использованием второй сенсорной схемы;
c) перемещение панели стола в другое положение;
d) перемещение панели стола путем управления приводом на основе первых данных позиционирования;
e) получение фактических вторых данных позиционирования панели стола с использованием второй сенсорной схемы;
f) перемещение панели стола путем управления приводом на основе разницы между исходными вторыми данными позиционирования и фактическими вторыми данными позиционирования; а также
g) итерационное повторение этапов (e) и (f), пока разница между исходными вторыми данными позиционирования и фактическими вторыми данными позиционирования не станет меньше пороговой величины.
Согласно третьему аспекту изобретения предложен дополнительный способ использования стола для пациента по вышеуказанному первому аспекту. Данный способ может быть использован для трехмерного картирования и содержит следующие этапы, предпочтительно в указанном порядке:
a) получение трехмерного рентгеновского изображения объекта, расположенного на столе для пациента, а также получение исходных первых данных позиционирования по меньшей мере одного подвижного соединения с использованием первой сенсорной схемы и получение исходных вторых данных позиционирования панели стола с использованием второй сенсорной схемы;
b) перемещение панели стола в другое положение;
c) получение двумерного рентгеновского изображения объекта, расположенного на столе для пациента, а также получение фактических вторых данных позиционирования по меньшей мере одного маркера с использованием второй сенсорной схемы;
d) трансформирование трехмерного рентгеновского изображения на основе разницы между исходными вторыми данными позиционирования и фактическими вторыми данными позиционирования; а также
e) наложение трансформированного трехмерного рентгеновского изображения и полученного двумерного рентгеновского изображения объекта.
Способы по второму или третьему аспекту могут быть реализованы в отношении стола для пациента или схемы получения рентгеновского изображения с целью повышения возможностей повторного позиционирования или повышения возможностей трехмерного картирования соответственно.
Согласно четвертому аспекту изобретения предложен элемент компьютерной программы, выполненный с возможностью управления способом по второму или третьему аспекту при реализации на компьютере.
Согласно пятому аспекту изобретения предложена читаемая компьютером среда, в которой хранится элемент компьютерной программы по четвертому аспекту.
Аспекты настоящего изобретения основаны на следующих представлениях.
Поскольку было отмечено, что стол для пациента, содержащий систему позиционирования, управляющую позиционированием панели стола только на основе данных позиционирования подвижных соединений, соединяющих панель стола с основанием стола, может не обеспечивать достаточной точности позиционирования, предложено добавить в систему позиционирования вторую сенсорную схему. Эта вторая сенсорная схема выполнена с возможностью предоставления данных позиционирования самого стола для пациента или по меньшей мере одного маркера, присоединенного к столу для пациента.
Следует подчеркнуть, что вторая сенсорная схема не заменяет первую сенсорную схему, а дополняет систему позиционирования. Другими словами, система позиционирования содержит две отдельные сенсорные схемы, работающие на основе отличающихся принципов измерений, а именно первая сенсорная схема может быть выполнена с возможностью определения положения панели стола путем измерения местоположения/ориентационного положения подвижных соединений, а вторая сенсорная схема может определять положение панели стола путем измерения местоположения/ориентационного положения, например, одного или нескольких маркеров, которые могут располагаться на панели стола.
Обнаружено, что каждая из сенсорных схем может иметь свои преимущества и недостатки, при этом система позиционирования, содержащая две такие отличающиеся сенсорные схемы, может позволить повысить характеристики позиционирования, например, повысить точность позиционирования и/или надежность позиционирования.
Например, первая сенсорная схема может основываться на измерениях механического положения в отношении подвижных соединений. Следовательно, первая сенсорная схема может измерять положение панели стола в большом диапазоне перемещений. Кроме того, первая сенсорная схема может быть непосредственно связана с управляющим устройством для привода, так чтобы управляющие данные, осуществляющие управление приводом, могли быть использованы для предоставления данных позиционирования. С другой стороны, вторая сенсорная схема может быть выполнена с возможностью измерения положения панели стола с точностью, превышающей точность измерений, выполняемых первой сенсорной схемой. В частности, к панели стола могут быть присоединены маркеры в местоположении, близком к ожидаемой исследуемой области, так что данные позиционирования, предоставляемые второй сенсорной схемой, точно соответствуют действительному положению исследуемой области.
Вторая сенсорная схема может быть выполнена с возможностью проведения немеханических измерений, а именно, например, оптических измерений положения панели стола или, в частности по меньшей мере одного маркера, расположенного на панели стола. Благодаря такой способности к проведению немеханических/оптических измерений можно достичь более высокой точности измерений. Положение маркеров может быть измерено в абсолютном пространстве, т.е. в абсолютной системе координат, предпочтительно независимой от каких-либо механических воздействий, таких как, например, изгиб компонентов стола для пациента в силу приложенных к нему дополнительных нагрузок.
Вторая сенсорная схема может содержать по меньшей мере одну камеру, установленную на основании стола. Камера может быть ориентирована так, что ее поле обзора направлено на ожидаемое положение маркеров. В таком варианте осуществления предпочтительно, чтобы по меньшей мере три маркера были присоединены к панели стола для пациента в фиксированных положениях относительно друг друга. Из изображения по меньшей мере трех маркеров, которое получено камерой, и с учетом того, что положение камеры на основании стола известно, можно определить точное местоположение и ориентационное положение стола для пациента.
Способ по второму аспекту изобретения может извлечь преимущества из повышенных характеристик позиционирования стола для пациента по первому аспекту изобретения. Способ может использоваться для получения исходных данных позиционирования в отношении исходного положения панели стола и далее, на более позднем временном этапе, а также после того как стол перемещен в другое положение - для восстановления исходного положения с высокой точностью позиционирования/придания ориентационного положения. Для этой цели система позиционирования не только получает исходные первые данные позиционирования, касающиеся местоположения/ориентационного положения подвижных соединений, но также получает точные исходные вторые данные позиционирования, касающиеся положения самой панели стола или маркеров, расположенных на панели стола. В более поздний момент времени панель стола для пациента сначала может быть перемещена по направлению к исходному положению путем управления приводом на основе исходных первых данных позиционирования. Однако такое позиционирование панели стола может не обеспечить достаточной точности. Таким образом, получают фактические вторые данные позиционирования маркеров, используя вторую сенсорную схему, при этом панель стола для пациента перемещают в направлении исходного положения путем управления приводом на основе разницы между исходными вторыми данными позиционирования и фактическими вторыми данными позиционирования. Данный процесс получения фактических вторых данных позиционирования и последующего перемещения панели стола на основе отклонения от исходных вторых данных позиционирования может итерационно повторяться, пока разница не станет меньше пороговой величины, при этом пороговая величина указывает точность позиционирования, которую требуется достичь.
Предложенный способ позиционирования может быть реализован в отношении стола для пациента по первому аспекту изобретения путем соответствующей адаптации управляющего устройства, содержащегося в столе для пациента. Тем самым может быть реализовано автоматическое управление позиционированием, обеспечивающее высокую точность позиционирования и высокую надежность. Например, в то время как перемещение панели стола путем управления приводом на основе первых данных позиционирования может быть быстрым, надежным, легко реализуемым, независимым от каких-либо дефектов второй сенсорной схемы и т.д., последующее перемещение панели стола путем управления приводом на основе разницы между исходными вторыми данными позиционирования и фактическими вторыми данными позиционирования может обеспечить весьма высокую точность позиционирования, предпочтительно не зависящую от каких-либо механических воздействий.
Способ трехмерного картирования по третьему аспекту изобретения может извлечь преимущества из характеристик стола для пациента по первому аспекту изобретения в том, что трехмерное рентгеновское изображение может быть получено в первый момент времени, при этом положение панели стола может быть точно зарегистрировано путем получения исходных данных позиционирования с использованием обеих, первой и второй, сенсорных схем, а далее в более поздний момент времени, а также после того, как панель стола перемещена в другое положение, панель стола может перемещаться в направлении исходного положения путем управления приводом на основе исходных первых данных позиционирования, при этом могут быть получены одно или несколько текущих двумерных рентгеновских изображений объекта, расположенного на панели стола. Такие текущие двумерные рентгеновские изображения могут накладываться/совмещаться с изначально полученным трехмерным рентгеновским изображением, чтобы предоставить врачу трехмерное картирование. Однако, поскольку действительное положение панели стола может все еще отличаться от исходного положения панели стола, используя вторую сенсорную схему, получают фактические вторые данные позиционирования по меньшей мере одного маркера. Эти фактические вторые данные позиционирования могут быть получены с высокой точностью и могут не зависеть от каких-либо механических воздействий на панель стола. На основе разницы между фактическими вторыми данными позиционирования и исходными вторыми данными позиционирования трехмерное рентгеновское изображение может быть повторно позиционировано/повторно сориентировано так, чтобы можно было достичь улучшенного совмещения трансформированного трехмерного рентгеновского изображения и полученных текущих двумерных рентгеновских изображений.
Способ по третьему аспекту изобретения может быть реализован в схеме получения рентгеновских изображений, содержащей устройство для получения рентгеновских изображений, такое как система с C-образной рамой, включающая в себя источник рентгеновского излучения и детектор рентгеновского излучения. Кроме того, схема получения рентгеновских изображений содержит стол для пациента по первому аспекту изобретения, а также управляющее устройство, выполненное с возможностью управления столом для пациента с целью реализации способа по третьему аспекту изобретения. Использование такой схемы получения рентгеновских изображений обеспечивает улучшенное 3D-картирование, по существу не зависящее от каких-либо механических воздействий на панель стола.
Следует отметить, что аспекты и варианты осуществления настоящего изобретения описаны со ссылкой на различные объекты. В частности, некоторые аспекты и варианты осуществления описаны со ссылкой на пункты формулы изобретения на способ, в то время как другие варианты осуществления описаны со ссылкой на пункты формулы изобретения на устройство. Однако специалист в данной области техники поймет из предшествующего и последующего описания, что, если не оговорено иное, в дополнение к любому сочетанию признаков, принадлежащих одному типу объектов, любое сочетание между признаками, относящимися к различным объектам, следует рассматривать как раскрытое в данной заявке.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Признаки и преимущества настоящего изобретения далее будут описаны в отношении конкретных вариантов осуществления, показанных на прилагаемых чертежах, которыми, однако, изобретение не ограничивается.
На Фигуре 1 показана схема получения рентгеновских изображений, содержащая стол для пациента по одному варианту осуществления настоящего изобретения.
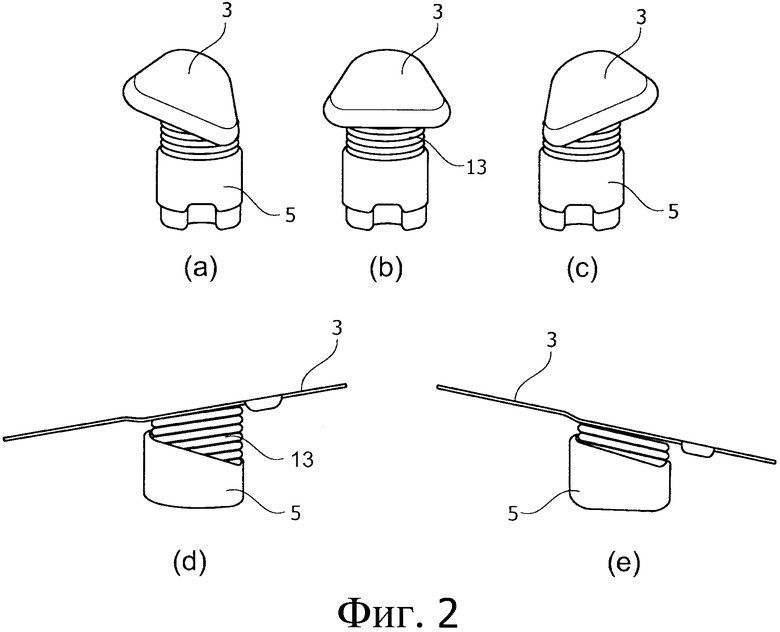
На Фигуре 2 показаны возможные перемещения панели стола для пациента по одному варианту осуществления настоящего изобретения.
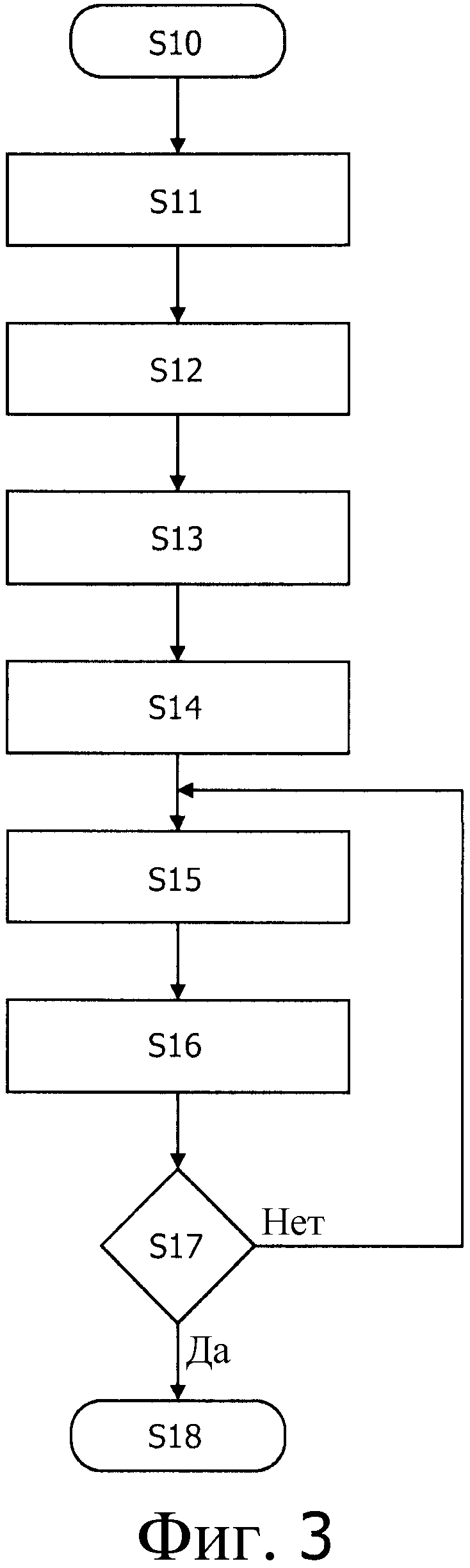
На Фигуре 3 показана блок-схема алгоритма способа автоматического позиционирования стола для пациента по одному варианту осуществления настоящего изобретения.
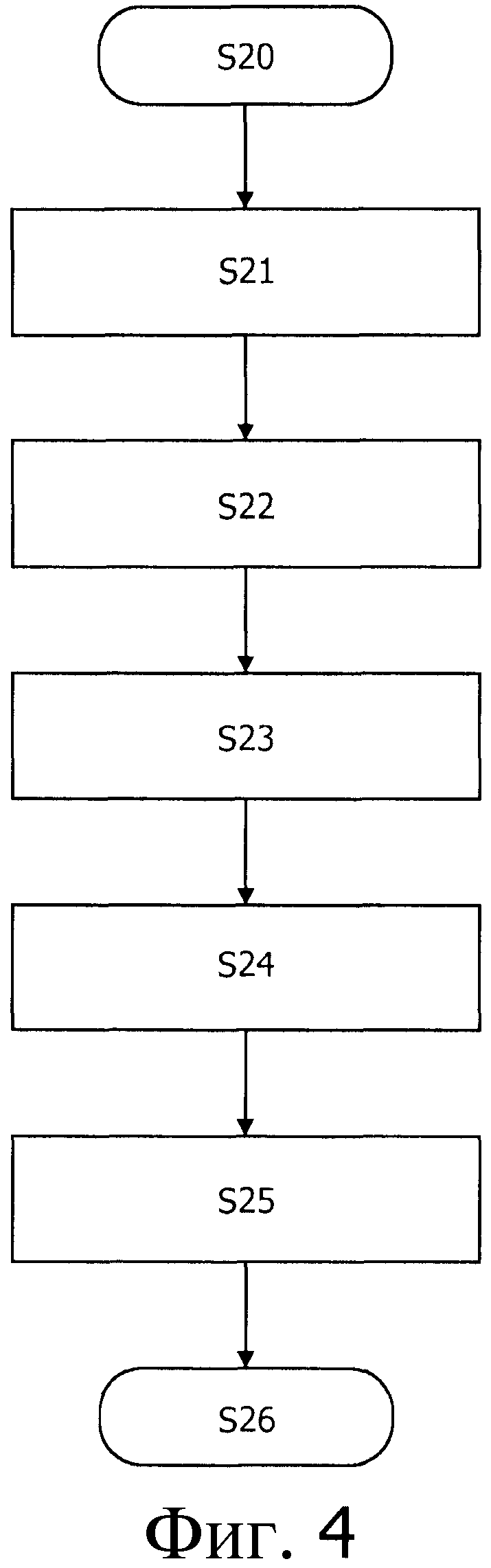
На Фигуре 4 показана блок-схема алгоритма способа трехмерного картирования с использованием стола для пациента по одному варианту осуществления настоящего изобретения.
Элементы, показанные на чертежах, представлены схематично и выполнены не в масштабе.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
На Фигуре 1 показана схема 100 получения рентгеновских изображений, содержащая устройство 200 для получения рентгеновских изображений и стол 1 для пациента. Устройство 200 для получения рентгеновских изображений содержит систему 201 с C-образной рамой, закрепленную на потолке 203 с помощью подвижного крепежного механизма 205. Система 201 с C-образной рамой содержит C-образную раму 207. На одном конце C-образной рамы 207 закреплен источник 209 рентгеновского излучения. На противоположном конце C-образной рамы 207 расположен детектор 211 рентгеновского излучения. Система 201 с C-образной рамой может перемещаться поступательно или вращательно в различных направлениях или вокруг различных осей, как указано на Фигуре 1 соответствующими стрелками, чтобы перемещать C-образную раму согласно различным степеням свободы, а именно изменяя положение вокруг горизонтальной и вертикальной осей, изменяя расстояния источник-изображение (SID) и т.д. Такая возможность различных перемещений C-образной рамы 207 позволяет расположить источник 209 рентгеновского излучения и детектор 211 рентгеновского излучения так, чтобы можно было получить рентгеновские изображения органов пациента, лежащего на столе 1 для пациента (для простоты пациент на Фигуре 1 не показан).
Стол 1 для пациента содержит панель 3 стола и основание 5 стола. Панель 3 стола соединена с основанием 5 стола посредством рычага 7, крепящегося к подвижному соединению 9. Для перемещения панели 3 стола предусмотрен привод 11. Чтобы закрыть рычаг 7, между панелью 3 стола и основанием 5 стола расположен воротник 13. Для получения данных позиционирования, указывающих местоположение и/или ориентационное положение подвижного соединения 9, предусмотрена первая сенсорная схема 15. Такие данные позиционирования по меньшей мере приблизительно относятся к положению панели 3 стола, связанной с подвижным соединением 9 посредством рычага 7.
Следует отметить, что механизм перемещения на Фигуре 1, в состав которого входят привод 11, рычаг 7 и подвижное соединение 9, а также первая сенсорная схема 15, показанные на Фигуре 1, проиллюстрированы и описаны в сильно упрощенном виде. Специалист в данной области техники сможет ясно понять различные возможности реализации соответствующих компонентов стола 1 для пациента. Например, привод 11 может включать в себя один или несколько двигателей, выполненных с возможностью непосредственного или опосредованного приложения усилия к панели 3 стола или рычагу 7, или соединению 9, связанному с ними. Кроме того, вместо единственного подвижного соединения 9 и единственного рычага 7 может быть создан более сложный механизм, включающий в себя множество соединений и рычагов. Помимо этого, первая сенсорная схема 15 может быть реализована различными способами. Например, первая сенсорная схема может быть выполнена с возможностью детектирования смещения или поворота одного или нескольких компонентов приводного механизма. Хотя первая сенсорная схема 15 на Фигуре 1 представлена в виде отдельной части, она также может быть встроена в один из компонентов приводного механизма. Например, первая сенсорная схема может быть интегрирована в привод 11 так, что, например, двигатель, входящий в состав привода 11, обеспечивает обратную связь в отношении движения, порожденного приводом, тем самым предоставляя данные позиционирования в отношении соединения 9.
В основание 5 стола встроена вторая сенсорная схема 17. Вторая сенсорная схема 17 содержит камеру, расположенную и сориентированную так, что ее поле обзора 19 включает в себя участок панели 3 стола, на котором созданы три маркера 21. Эти три маркера 21 расположены в виде треугольника. Путем получения изображения трех маркеров 21 с использованием камеры, вторая сенсорная схема может предоставить данные позиционирования маркеров 21, поскольку фиксированное положение маркеров 21 относительно друг друга так же, как и фиксированное положение камеры, входящей в состав второй сенсорной схемы 17, известны. Соответственно положение области панели 3 стола, на которой маркеры 21 неподвижно зафиксированы, может определяться второй сенсорной схемой оптическим способом и с высокой точностью.
Следует отметить, что положение маркеров, число маркеров и расстояние, на котором маркеры расположены друг от друга, могут варьироваться. Таким же образом могут изменяться местоположение, ориентационное положение и число камер. Как показано на Фигуре 1, для второй сенсорной схемы 17 может использоваться единственная камера. В этом случае на панели 3 стола должны быть предусмотрены по меньшей мере три маркера 21. Положение маркеров 21 может быть далее установлено, используя тот факт, что их относительное положение всегда является фиксированным. Благодаря линиям перспективы, проходящим через маркеры и фокальную точку камеры, их положение в абсолютной системе координат может быть однозначно определено.
Существует возможность дополнительно добавить множество камер для повышения точности и/или для обеспечения надежности в случае загораживания маркеров 21. Имеется также возможность добавить множество маркеров 21, образующих индивидуальный паттерн, чтобы обеспечить надежность в случае загораживания некоторых маркеров, а также для обеспечения меньшей зависимости от поля обзора камер.
По альтернативному варианту имеется возможность определить положение маркеров, используя стереокамеры. При таком подходе по меньшей мере два маркера 21 должны быть использованы для определения местоположения и по меньшей мере два маркера 21 должны быть использованы для определения ориентационного положения панели 3 стола. Разумеется, здесь также существует возможность при необходимости добавить большее число камер и/или маркеров для повышения точности и/или для обеспечения надежности в случае загораживания маркеров.
Устройство 200 для получения изображений и стол 1 для пациента соединены с управляющим устройством 51. Управляющее устройство 51 может быть выполнено с возможностью получения данных позиционирования стола 1 для пациента, а также данных позиционирования устройства 200 для получения изображений. Кроме того, управляющее устройство 51 может получать данные изображений, обеспечиваемые детектором 211 рентгеновского излучения. Как будет подробнее показано ниже, с использованием таких данных изображение исследуемой области 213 может отображаться на дисплее 53, присоединенном к управляющему устройству 51. Помимо этого, в целях рентгеновского картирования на дисплее 53 может отображаться наложение ранее полученного трехмерного изображения исследуемой области 213 и текущего двумерного изображения, полученного устройством 200 для получения изображений.
На Фигурах 2(a)-(e) показаны различные возможные перемещения панели 3 стола относительно основания 5 стола. Панель 3 стола может быть смещена и/или наклонена относительно основания 5 стола. Воротник 13 охватывает и предохраняет приводной механизм, включающий в себя соединение 9 и рычаг 7, соединяющий панель 3 стола с основанием 5 стола.
На примере блок-схемы алгоритма, представленной на Фигуре 3, описан способ использования стола 1 для пациента для автоматического позиционирования панели 3 стола.
После запуска процедуры (этап S10) получают исходные первые данные позиционирования по меньшей мере одного подвижного соединения 9 с использованием первой сенсорной схемы 15 (этап S11). Далее получают исходные вторые данные позиционирования по меньшей мере одного маркера 21 с использованием второй сенсорной схемы 17 (этап S12).
Следует отметить, что этапы получения первых и вторых исходных данных позиционирования могут выполняться последовательно или параллельно, при этом порядок получения таких данных позиционирования значения не имеет.
Совместно с получением первых и вторых исходных данных позиционирования на первом временном этапе могут выполняться дополнительные технологические операции. Например, с использованием устройства 200 для получения изображений может быть получен набор рентгеновских изображений. Исходные первые и вторые данные позиционирования теперь могут указывать позиционное соотношение между исследуемой областью пациента, расположенного на столе для пациента, и устройством для получения рентгеновских изображений, использованным для сбора рентгеновских изображений.
После выполнения таких технологических этапов S11, S12 на первом временном этапе, панель 3 стола может переместиться в другое положение (этап S13). Например, стол 1 для пациента может быть использован для иных целей, например, для получения рентгеновских изображений другой исследуемой области.
Далее, на более позднем втором временном этапе, стол 1 для пациента может быть использован, например, снова для получения рентгеновских изображений той же исследуемой области того же пациента. Для этой цели может потребоваться восстановить исходное положение панели 3 стола с высокой точностью. Таким образом, перемещение панели 3 стола сначала осуществляется путем управления приводом 11 на основе исходных первых данных позиционирования (этап S14). Другими словами, управление приводом 11 осуществляется так, чтобы восстановить исходное местоположение/ориентационное положение подвижного соединения 9, соответствующее первому временному этапу.
Однако, поскольку было отмечено, что такое восстановление положения, основанное лишь на исходных первых данных позиционирования, не всегда приводит к тому, что исследуемая область точно оказывается в том же местоположении/ориентационном положении, как на первом временном этапе, что может быть связано с воздействием механических нагрузок на стол для пациента, выполняются дополнительные этапы позиционирования.
Во-первых, получают фактические вторые данные позиционирования по меньшей мере одного маркера 21 с использованием второй сенсорной схемы 17 (этап S15). Фактические вторые данные позиционирования точно указывают фактическое местоположение/ориентационное положение той области панели 3 стола, к которой маркер/маркеры присоединены.
Далее перемещение панели 3 стола осуществляется путем управления приводом 11 на основе разницы между исходными вторыми данными позиционирования и фактическими вторыми данными позиционирования (этап S16). Другими словами, фактические вторые данные позиционирования, указывающие фактическое местоположение и ориентационное положение маркеров 21 в ходе второго временного этапа, сравниваются с исходными вторыми данными позиционирования, указывающими местоположение и ориентационное положение маркеров в ходе первого временного этапа, при этом панель 3 стола перемещается в соответствии с разницей между такими исходными и фактическими данными позиционирования.
Корректировка местоположения и ориентационного положения панели 3 стола выполняется итерационно, т.е. этапы S15 и S16 повторяются, пока на этапе S17 принятия решения не определится, что разница между исходными вторыми данными позиционирования и фактическими вторыми данными позиционирования достигла величины ниже пороговой.
Другими словами, разница в местоположении δpos и разница в ориентационном положении δorient могут быть минимизированы следующим образом
 ,
,
где  - (среднее) местоположение маркеров в абсолютной системе координат, а
- (среднее) местоположение маркеров в абсолютной системе координат, а  - ориентационное положение конфигурации маркеров в абсолютной системе координат. Очевидно, что δpos и δorient могут представлять собой функции механических параметров стола для пациента. Система управления может быть оснащена, например, ПИД-регулятором или фильтром Кальмана.
- ориентационное положение конфигурации маркеров в абсолютной системе координат. Очевидно, что δpos и δorient могут представлять собой функции механических параметров стола для пациента. Система управления может быть оснащена, например, ПИД-регулятором или фильтром Кальмана.
После восстановления местоположения и ориентационного положения панели 3 стола в такой последовательности операций S15, S16, S17 итерационным путем, расхождение в местоположении и ориентационном положении панели 3 стола между первым этапом во времени и вторым этапом во времени меньше заданного порогового. Соответственно точность повторного позиционирования может определяться соответствующим выбором порогового значения. Далее процедура повторного позиционирования может быть завершена на этапе S18.
Восстановив исходное положение с высокой точностью, рентгеновские изображения можно получать, например, в ходе второго временного этапа, при этом рентгеновские изображения будут точно соответствовать рентгеновским изображениям, полученным на первом временном этапе, если говорить о позиционно/ориентационном соотношении между исследуемой областью и устройством для получения рентгеновских изображений. Следовательно, рентгеновские изображения, полученные в текущий момент времени, можно легко сравнивать или совмещать с исходными рентгеновскими изображениями.
На примере Фигуры 4 будут даны пояснения в отношении одного варианта осуществления способа по использованию стола для пациента в целях трехмерного картирования.
Осуществив запуск процедуры (этап S20), на первом этапе S21 получают множество двумерных рентгеновских изображений исследуемой области организма пациента, расположенного на столе 1 для пациента, под различными углами. Из подобного множества двумерных рентгеновских изображений может быть построено трехмерное рентгеновское изображение. Например, на таком трехмерном рентгеновском изображении может быть подробно представлена сосудистая система в исследуемой области организма пациента. На данном первом временном этапе получают исходные первые данные позиционирования по меньшей мере одного подвижного соединения 9 с использованием первой сенсорной схемы 15, а также получают исходные вторые данные позиционирования по меньшей мере одного маркера 21 с использованием второй сенсорной схемы 17. Различные процедуры получения изображений и данных позиционирования могут выполняться одновременно или в произвольном порядке следования.
До использования стола 1 для пациента в целях 3D-картирования, он может использоваться в различных целях, при этом панель 3 стола может перемещаться в различные положения (этап S22).
Далее, на втором временном этапе, получают по меньшей мере одно двумерное рентгеновское изображение исследуемой области организма пациента, расположенного на панели 3 стола. Одновременно с этим или вслед за этим получают фактические вторые данные позиционирования по меньшей мере одного маркера 21 с использованием второй сенсорной схемы 17 (этап S23).
Рассогласование между местонахождением и ориентационным положением исследуемой области в ходе первого временного этапа и в ходе второго временного этапа может быть указано разницей между исходными вторыми данными позиционирования и фактическими вторыми данными позиционирования. Другими словами, девиация t при поступательном перемещении и девиация φ при вращательном перемещении могут быть выражены следующим образом:
 , где < > обозначает скалярное произведение,
, где < > обозначает скалярное произведение,  .
.
На основе разницы между исходными вторыми данными позиционирования и фактическими вторыми данными позиционирования изначально полученное трехмерное рентгеновское изображение трансформируется (этап S24) и далее накладывается на двумерное рентгеновское изображение, полученное в текущий момент времени (этап S25), перед завершением процедуры (этап S26).
Путем такого трансформирования изначально полученного трехмерного рентгеновского изображения рассогласования между местоположением и ориентационным положением в ходе первого временного этапа и в ходе второго временного этапа могут компенсироваться, так что трехмерное рентгеновское изображение может быть точно совмещено с двумерным рентгеновским изображением, полученным в текущий момент времени, в целях трехмерного картирования.
Следует отметить, что термин «содержащий» не исключает наличия других элементов или этапов, а неопределенный артикль «a» не исключает множества элементов или этапов. Кроме того, элементы, описанные в связи с различными вариантами осуществления, могут быть объединены. Следует также отметить, что ссылочные позиции в формуле изобретения не должны рассматриваться как ограничивающие объем притязаний формулы изобретения.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
1 - стол для пациента
3 - панель стола
5 - основание стола
7 - рычаг
9 - соединение
11 - привод
13 - воротник
15 - первая сенсорная схема
17 - вторая сенсорная схема
19 - поле обзора
51 - управляющее устройство
53 - дисплей
100 - схема получения рентгеновских изображений
200 - устройство для получения рентгеновских изображений
201 - система с C-образной рамой
203 - потолок
205 - крепежный механизм
207 - C-образная рама
209 - источник рентгеновского излучения
211 - детектор рентгеновского излучения
213 - исследуемая область.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПАЦИЕНТА ДЛЯ СИСТЕМ РАДИАЦИОННОЙ ТЕРАПИИ | 2004 |
|
RU2342172C2 |
| ОПРЕДЕЛЕНИЕ ПРОФИЛЯ СУБЪЕКТА С ПОМОЩЬЮ КАМЕРЫ | 2018 |
|
RU2777943C2 |
| АППАРАТ ДЛЯ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ СТОЛА ПАЦИЕНТА | 2010 |
|
RU2573051C2 |
| ОПРЕДЕЛЕНИЕ КОНКРЕТНОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2011 |
|
RU2574374C2 |
| ГИБКИЙ КАБЕЛЬ СО ВСТРОЕННЫМИ ДАТЧИКАМИ ДЛЯ ДИНАМИЧЕСКОГО ОТСЛЕЖИВАНИЯ ИНСТРУМЕНТА | 2011 |
|
RU2597136C2 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ КАРТЫ ЭЛЕКТРИЧЕСКОЙ АКТИВНОСТИ | 2012 |
|
RU2622371C2 |
| УСТРОЙСТВО СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ | 2014 |
|
RU2687883C2 |
| СИСТЕМА И СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ВНУТРЕННЕЙ И НАРУЖНОЙ ОБЛАСТЕЙ ПАЦИЕНТА | 2009 |
|
RU2564079C2 |
| УСТРОЙСТВО ОКАЗАНИЯ ПОМОЩИ ПОЛЬЗОВАТЕЛЮ ВО ВРЕМЯ ХИРУРГИЧЕСКОЙ ПРОЦЕДУРЫ | 2014 |
|
RU2687826C2 |
| СИСТЕМА ДЛЯ ЛЕЧЕНИЯ, СПОСОБ КАЛИБРОВКИ И НОСИТЕЛЬ ИНФОРМАЦИИ | 2019 |
|
RU2766050C1 |
Изобретение относится к медицинской технике, а именно к столам для пациента, используемым в средствах получения рентгеновских изображений. Стол для пациента включает систему позиционирования и содержит панель стола, соединенную с основанием стола посредством по меньшей мере одного подвижного соединения, при этом панель стола выполнена с возможностью перемещения посредством привода. Система позиционирования включает первую сенсорную схему для предоставления данных позиционирования по меньшей мере одного подвижного соединения и вторую сенсорную схему для предоставления данных позиционирования панели стола при помощи оптических измерений. Способ использования стола состоит в том, что получают исходные первые данные позиционирования по меньшей мере одного подвижного соединения с использованием первой сенсорной схемы, получают исходные вторые данные позиционирования панели стола с использованием второй сенсорной схемы, перемещают панель стола в другое положение путем управления приводом на основе исходных данных позиционирования и получают фактические вторые данные позиционирования панели стола с использованием второй сенсорной схемы. После чего перемещают панель стола, управляя приводом на основе разницы между исходными вторыми данными позиционирования и фактическими вторыми данными позиционирования, при итерационном повторении этапов, пока разница между исходными вторыми данными позиционирования и фактическими вторыми данными позиционирования не станет меньше пороговой величины. В варианте способа использования стола для трехмерного картирования дополнительно получают трехмерное рентгеновское изображение объекта, расположенного на панели стола, исходные первые данные позиционирования с использованием первой сенсорной схемы и исходные вторые данные позиционирования панели стола с использованием второй сенсорной схемы, трансформируют трехмерное рентгеновское изображение на основе разницы между исходными вторыми данными позиционирования и фактическими вторыми данными позиционирования и накладывают трансформированное трехмерное рентгеновское изображение на полученное двумерное рентгеновское изображение объекта. Способ осуществляется с использованием схемы получения рентгеновских изображений, содержащей устройство получения рентгеновских изображений, включающее источник и детектор рентгеновского излучения, стол для пациента и управляющее устройство, снабженное машиночитаемым носителем. Использование изобретения позволяет повысить точность позиционирования. 5 н. и 6 з.п. ф-лы, 4 ил.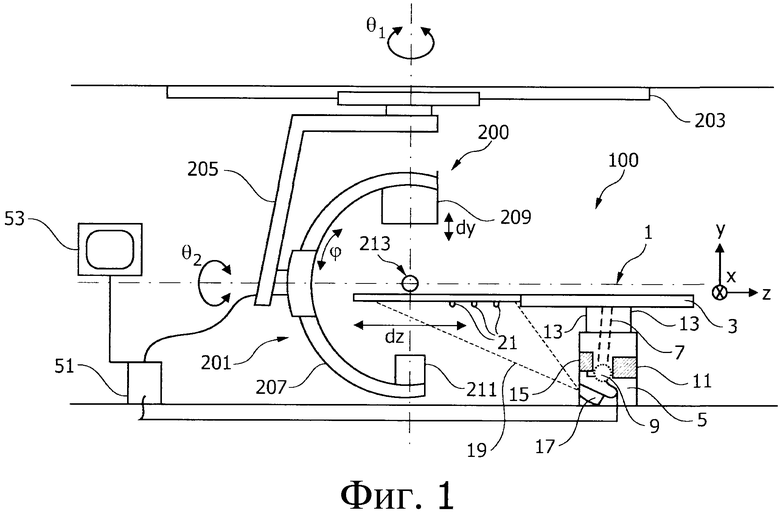
1. Стол (1) для пациента, содержащий систему позиционирования,
при этом стол (1) для пациента содержит панель (3) стола, соединенную с основанием (5) стола посредством по меньшей мере одного подвижного соединения (9), при этом панель (3) стола выполнена с возможностью перемещения с использованием по меньшей мере одного привода (11);
при этом система позиционирования содержит:
первую сенсорную схему (15) для предоставления данных позиционирования по меньшей мере одного подвижного соединения (9), при этом первая сенсорная схема (15) выполнена с возможностью определения положения панели (3) стола при помощи измерений механического положения в отношении подвижного соединения (9); и
вторую сенсорную схему (17) для предоставления данных позиционирования панели (3) стола при помощи оптических измерений, при этом вторая сенсорная схема (17) содержит по меньшей мере одну камеру, установленную на основании (5) стола.
2. Стол для пациента по п. 1,
в котором сенсорная схема (17) выполнена с возможностью немеханического измерения положения панели (3) стола.
3. Стол для пациента по одному из пп. 1 или 2,
в котором вторая сенсорная схема (17) выполнена с возможностью оптического измерения положения панели (3) стола.
4. Стол для пациента по п. 1,
дополнительно содержащий маркеры (21), присоединенные к панели (3) стола,
при этом вторая сенсорная схема (17) выполнена с возможностью предоставления данных позиционирования маркеров (21).
5. Стол для пациента по п. 4,
в котором по меньшей мере три маркера (21) присоединены к панели (3) стола в зафиксированных положениях относительно друг друга.
6. Стол для пациента по одному из пп. 1 или 2,
в котором вторая сенсорная схема (17) выполнена с возможностью измерения положения панели (3) стола с точностью, превышающей точность измерений, выполняемых первой сенсорной схемой (15).
7. Способ использования стола (1) для пациента по одному из пп. 1-6, предназначенный для автоматического позиционирования панели (3) стола, в котором:
(a) получают исходные первые данные позиционирования по меньшей мере одного подвижного соединения (9) с использованием первой сенсорной схемы (15);
(b) получают исходные вторые данные позиционирования панели (3) стола с использованием второй сенсорной схемы (17);
(c) перемещают панель (3) стола в другое положение;
(d) перемещают панель (3) стола путем управления приводом (11) на основе исходных первых данных позиционирования;
(e) получают фактические вторые данные позиционирования панели (3) стола с использованием второй сенсорной схемы (17);
(f) перемещают панель (3) стола путем управления приводом (11) на основе разницы между исходными вторыми данными позиционирования и фактическими вторыми данными позиционирования;
(g) итерационно повторяют этапы (e) и (f), пока разница между исходными вторыми данными позиционирования и фактическими вторыми данными позиционирования не станет меньше пороговой величины.
8. Стол для пациента по одному из пп. 1 или 2,
дополнительно содержащий управляющее устройство (51), выполненное с возможностью управления столом (1) для пациента для реализации способа по п. 7.
9. Способ использования стола (1) для пациента по одному из пп. 1-6, предназначенный для трехмерного картирования, в котором:
(a) получают трехмерное рентгеновское изображение объекта, расположенного на панели (3) стола, а также получают исходные первые данные позиционирования по меньшей мере одного подвижного соединения (9) с использованием первой сенсорной схемы (15) и получают исходные вторые данные позиционирования панели (3) стола с использованием второй сенсорной схемы (17);
(b) перемещают панель (3) стола в другое положение;
(c) получают двумерное рентгеновское изображение объекта, расположенного на панели (3) стола, а также получают фактические вторые данные позиционирования панели (3) стола с использованием второй сенсорной схемы (17);
(d) трансформируют трехмерное рентгеновское изображение на основе разницы между исходными вторыми данными позиционирования и фактическими вторыми данными позиционирования;
(e) накладывают трансформированное трехмерное рентгеновское изображение и полученное двумерное рентгеновское изображение объекта.
10. Схема (100) получения рентгеновских изображений, содержащая: устройство (200) для получения рентгеновских изображений, содержащее
источник (209) рентгеновского излучения и детектор (211) рентгеновского излучения;
стол (1) для пациента по одному из пп. 1-6 или 8,
управляющее устройство (51), выполненное с возможностью управления столом (1) для пациента для реализации способа по п. 9.
11. Машиночитаемый носитель, в котором хранится программный элемент, выполненный с возможностью управления способом по одному из пп. 7 или 9 при помощи компьютера.
| US 2007251008 A1, 01.11.2007 | |||
| US 2004122311 A1, 24.06.2004 | |||
| US 2006104422 A1, 18.05.2006 | |||
| US 2005084074 A1, 21.04.2005 | |||
| АППАРАТ РЕНТГЕНОВСКИЙ | 1998 |
|
RU2150888C1 |
| Achim Schweikard et al.Robotic Motion Compensation for Respiratory Movement during Radiosurgery, Biomedical Paper, Computer Aided Surgery 5:263-277 (2000) | |||

