Заявляемые технические решения относятся к области радиолокации и могут быть использованы для контроля воздушного пространства и управления воздушным движением.
Для обеспечения контроля и управления движением необходимо обнаруживать цели с высокой вероятностью на максимально возможных дальностях, измерять координаты целей с требуемой точностью и разрешать близко расположенные цели с необходимой достоверностью.
Как правило, для выполнения указанных требований используют РЛС S-диапазона (длина волны λ=7,5-15 см) с игольчатой формой диаграммы направленности антенны (ДНА). При этом разрешающая способность по угловым координатам определяется в основном шириной луча ДНА. Поскольку ширина луча ДНА в РЛС S-диапазона обычно имеет малую величину (около 1-2 град.), требуются большие затраты времени на обзор пространства достаточно большого размера, например на круговой обзор. Ситуация усугубляется при работе по малозаметным целям (целям с малой величиной эффективной поверхности рассеяния (ЭПР)). В ряде случаев поставленные задачи вообще не могут быть выполнены с помощью РЛС S-диапазона. Для обнаружения таких целей целесообразно использование РЛС более длинноволновых диапазонов: дециметрового, метрового и т.д., так как для большинства современных летательных аппаратов ЭПР изменяется пропорционально изменению длины волны σ~λγ, где γ≥1 - коэффициент формы [D.Moraitis, S.Alland. Effect of Frequncy on the Detection of Shaped (Low RCS) Targets. IEEE, Radar-85, 1985, p.p.159-162]. Для более длинноволновой РЛС ЭПР цели будет больше, и, следовательно, при прочих равных условиях, цель будет обнаружена этой РЛС раньше, чем коротковолновой РЛС. Однако длинноволновая РЛС, при равных размерах апертуры антенны, имеет бóльшую ширину луча ДНА и потому обладает худшей разрешающей способностью по угловым координатам.
Известны технические решения, которые объединяют положительные качества РЛС разных диапазонов волн и позволяют обеспечить требуемые вероятности обнаружения, в том числе малозаметных целей на больших дальностях и заданные точности измерений координат целей с высокой разрешающей способностью.
Известен способ радиолокационного обнаружения целей, основанный на разделении операций между РЛС, заключающийся в том, что обнаружение целей осуществляют с помощью РЛС1 с бóльшей длиной волны, а разрешение целей и определение более точных координат - с помощью РЛС2 с меньшей длиной волны, сопровождают цели с помощью РЛС1 с большей длиной волны и уточняют координаты сопровождаемых целей, если изменились условия сопровождения, с помощью РЛС2 с меньшей длиной волны [патент №2092868, 6 G01S 13/04].
Известен комплекс РЛС, в котором реализован способ-аналог [патент №2092868, 6 G01S 13/04], содержащий РЛС1 с большей длиной волны и РЛС2 с меньшей длиной волны, при этом вход-выход РЛС1 соединен с выходом-входом РЛС2. В этом комплексе обнаружение и сопровождение целей осуществляют с помощью РЛС1, а разрешение целей и уточнение их координат - с помощью РЛС2 по мере необходимости, когда условия сопровождения изменяются и возникает необходимость уточнения разрешения целей и их координат.
Суть способа и комплекса состоит в том, что РЛС1 выполняет не только функции обзора и обнаружения целей, но и их сопровождения. Если точность сопровождения РЛС1 недостаточна (например, в случае сопровождения группы не разрешаемых РЛС1 целей по угловым координатам), то каждую цель группы дополнительно обнаруживают с помощью РЛС2, разрешают цели и измеряют их координаты с необходимой точностью. Для реализации этого способа необходим комплекс из двух РЛС.
Недостаток аналога способа и комплекса РЛС состоит в следующем. Для обнаружения малозаметных целей на достаточно больших дальностях (сотни километров) потребуется РЛС1 с большой длиной волны (несколько метров). Поэтому при обнаружении цели РЛС1 с такой длиной волны для разрешения групповых целей требуются большие затраты энергии РЛС2 с более высокой разрешающей способностью, так как, при прочих равных условиях, ширина луча ДНА РЛС2 в S-диапазоне значительно меньше ширины луча ДНА РЛС1 в метровом диапазоне. Поэтому на просмотр достаточно большого сектора пространства, указанного РЛС1, потребуется многократное зондирование этого сектора, что и определяет большие временные затраты РЛС2.
Наиболее близким техническим решением к заявляемому изобретению является способ радиолокационного обзора пространства и сопровождения целей, основанный на разделении операций обнаружения, разрешения и сопровождения целей между РЛС, в котором эти операции осуществляют с помощью РЛС1, РЛС2, …, РЛСn с длинами волн соответственно λ1>λ2>…>λn, где n≥2, при этом для разрешения целей, обнаруженных РЛС1 применяют РЛС последовательно от РЛС2, используя данные РЛС1, до РЛСn, используя данные РЛСn-1. Кроме того, сопровождают цели с помощью РЛСi, i<n, и уточняют координаты в случаях, когда точность измерений РЛСi недостаточна, с помощью РЛС, начиная с РЛСj, j>i [патент №2150716, 6 G01S 13/04].
Известен комплекс РЛС, (Фиг.1), который реализует способ-прототип, содержащий последовательно соединенные РЛС1, РЛС2, РЛСn, где n≥2, причем длины волн РЛС1, РЛС2, …, РЛСn находятся в соотношении λ1>λ2>…>λn, при этом выход РЛСi, i=1, …, (n-1), предназначенный для передачи данных об обнаруженных целях, соединен со входом РЛС(i+1), выход РЛСn является выходом комплекса [патент №2150716, 6 G01S 13/04].
Суть способа и комплекса РЛС заключается в следующем. Первичное обнаружение цели наиболее длинноволновой РЛС1 комплекса из n>2 РЛС, осуществляющей обзор заданного пространства, обеспечивается выбором такого значения длины волны λ1, при котором ЭПР заданной малозаметной цели σ1 будет достаточной для ее обнаружения на заданной дальности при определенном энергетическом потенциале РЛС1.
С помощью РЛС2 осуществляют уточнение координат (разрешение) целей, осуществляя их допоиск в пределах зоны пространства, определяемого шириной луча РЛС1 - θA1 (вместо обзора всего заданного пространства). Хотя ЭПР малозаметной цели на длине волны λ2 меньше, чем на длине волны λ1, но, поскольку РЛС2 может сосредоточить энергию только в секторе допоиска, она может обнаружить на той же дальности цель при меньшем значении ЭПР σ2<σ1. Аналогично происходит уточнение координат с помощью РЛС с длинами волн λ3, λ4, …, λn. Значение λn определяется требованием к разрешающей способности комплекса (которую обеспечивает РЛСn). После уточнения координат целей и их разрешения с помощью РЛСn сопровождение целей ведут с помощью РЛСi, которая обеспечивает требуемую точность сопровождения. Выбор РЛСi осуществляют исходя из известного соотношения [Теоретические основы радиолокации, под ред. Я.Д.Ширмана. - М.: Сов. Радио, 1970, с.290]

где θAi - ширина луча ДНА РЛСi;
 - среднеквадратическая ошибка измерения угловой координаты РЛСi;
- среднеквадратическая ошибка измерения угловой координаты РЛСi;
qi - отношение сигнал/шум для РЛСi.
Поскольку различные цели имеют свои значения ЭПР, а значит, и величину qi, то они могут сопровождаться различными РЛС комплекса, обеспечивающими заданные значения .
Если по каким-либо причинам возникает необходимость уточнения координат сопровождаемых целей, то используют РЛС последовательно, начиная с РЛСj, j>i, которая обеспечит обнаружение целей по данным РЛСi, и до РЛС(j+k), которая обеспечит разрешение целей. Таким образом, за счет обнаружения и измерения координат РЛС, начиная с РЛС с наибольшей длиной волны, последовательно переходя к РЛС с меньшей длиной волны удается компенсировать уменьшение ЭПР целей из-за сокращения длины волны путем увеличения концентрации энергии облучения цели за счет соответствующего уменьшения зоны обзора пространства, в котором каждая последующая РЛС должна обнаружить цель и измерить ее координаты. При этом для РЛСn с наименьшей длиной волны размер этой зоны будет определяться шириной луча предыдущей РЛСn-1. По сравнению с аналогом в прототипе размер сектора допоиска постепенно уменьшается при переходе от наиболее длинноволновой РЛС1 к наиболее коротковолновой РЛСn, и степень уменьшения будет определяться величиной n. Это позволяет снизить затраты энергии для РЛСn с наибольшей разрешающей способностью. При этом время полного цикла, включающего период от обнаружения цели РЛС1 и до разрешения цели РЛСn, будет определяться выражением
где ti - время, затрачиваемое РЛСi на перевод луча ДНА в указанный РЛСi-1 сектор, допоиск цели в этом секторе и передачу уточненных данных РЛСi+1. Это время практически не зависит от величины ЭПР цели и для РЛС с механическим перемещением луча хотя бы по одной угловой координате, в основном, определяется скоростью механического сканирования лучом антенны.
В этом заключается недостаток наиболее близкого известного способа и комплекса, реализующего этот способ при n>2, а именно большое время, которое независимо от ЭПР цели тратится на последовательный переход от момента обнаружения цели РЛС1 с наибольшей длиной волны до РЛСn с наименьшей длиной волны, обеспечивающей требуемое разрешение целей. При этом для целей с малой ЭПР эти переходы являются необходимыми, а цели с достаточно большой ЭПР могли бы быть обнаружены с пропуском отдельных РЛС по цепочке, в том числе, при достаточной величине ЭПР мог бы быть переход от РЛС1 к РЛСn. Таким образом, возникает противоречие: для обнаружения малозаметных целей необходимо последовательно обнаруживать их с помощью РЛС, начиная с РЛС1 и заканчивая РЛСn, но это достигается при n>2 ценой существенного увеличения затрат времени на обнаружение целей с достаточно большой ЭПР, например ЭПР, достаточной для обнаружения цели с помощью РЛСn S-диапазона.
Заявляемые изобретения направлены на устранение этого недостатка. Таким образом, техническим результатом (решаемой задачей) является уменьшение времени перехода от РЛС с наибольшей длиной волны к РЛС с наименьшей длиной волны для целей с достаточно большой ЭПР, что позволяет увеличить дальность разрешения таких целей.
Указанный технический результат (решаемая задача) достигается тем, что в известном способе радиолокационного обзора пространства, основанном на разделении операций обнаружения и разрешения целей между РЛС1, РЛС2, …, PЛCn с длинами волн соответственно λ1>λ2>…>λn, где n>2, причем обзор пространства и первичное обнаружение целей осуществляют с помощью РЛС1, а окончательное разрешение обнаруженных РЛС1 целей осуществляет РЛСn, согласно изобретению, с помощью РЛСk, k=1, …, n-1, оценивают величину ЭПР обнаруженной цели и передают информацию о цели той из РЛСm с наименьшей длиной волны, m=(k+1), …, n, которая способна обнаружить цель с требуемой вероятностью.
Технический результат (решаемая задача) достигается тем, что в радиолокационный комплекс, содержащий n>2 РЛС, причем длины волн РЛС1, РЛС2, …, PЛCn находятся в соотношении λ1>λ2>…>λn, при этом выход РЛСi, i=1, …, (n-1), предназначенный для передачи данных об обнаруженных целях, соединен со входом РЛС(i+1), а выход РЛСn является выходом комплекса, согласно изобретению, в каждую РЛСi дополнительно введены (i-2) входов при i>2 и n-(i+1) выходов при i<(n-1), причем каждый из дополнительных выходов РЛСi соединен с одним из дополнительных входов РЛСj, j=i+2, …, n.
Технический результат (решаемая задача) достигается тем, что в радиолокационный комплекс, содержащий n>2 РЛС, причем длины волн РЛС1, РЛС2, …, PЛCn находятся в соотношении λ1>λ2>…>λn, согласно изобретению, дополнительно введен пункт управления, входы-выходы которого соединены соответственно с выходами-входами РЛС комплекса, при этом выход пункта управления является выходом комплекса.
Суть заявляемого способа и комплекса состоит в следующем. После обнаружения цели с помощью РЛС1 производят оценку величины ЭПР σ1 обнаруженной цели одним из известных способов, например, по формуле [Справочник по радиолокации. Под ред. М.Сколника, том 1, М., «Советское радио», 1976, с.357, формула (1)]

где R - расстояние до цели; Рпр - принятая мощность отраженного сигнала; Рпер - мощность передатчика, подводимая к антенне; G - коэффициент усиления приемной (передающей) антенны; λ - длина волны.
Далее последовательно пересчитывают оценку ЭПР цели, полученную в РЛС1, применительно для k-ой РЛС, k=2, …, n с меньшей длиной волны по формуле

где
σk - оценка ЭПР цели для РЛСk, найденная по формуле (4), k=2, …, n;
σ1 - оценка ЭПР для РЛС1, полученная по формуле (3);
λ1 - длина волны РЛС1; λk - длина волны РЛСk; γ - коэффициент формы цели (для малозаметных целей с малой ЭПР γ=2);
и оценивают вероятность обнаружения цели РЛСk-Dk (k=2, …, n) по формуле [Теоретические основы радиолокации. Под ред. Я.Д.Ширмана, «Советское радио», М., 1970, стр.163, формула (10)]
где Dk - вероятность обнаружения цели РЛСk;
F - заданная вероятность ложной тревоги;
qEk - отношение сигнал/шум по напряжению на выходе оптимального фильтра;
 , [там же, стр.160];
, [там же, стр.160];
Ek - энергия принятого сигнала в РЛСk;
N0k - спектральная плотность мощности шума (помехи) в РЛСk;
 - отношение мощности сигнала к мощности шума (помехи) (отношение сигнал/шум по мощности) в РЛСk.
- отношение мощности сигнала к мощности шума (помехи) (отношение сигнал/шум по мощности) в РЛСk.
Отношение сигнал/шум по мощности qk может быть представлено с использованием формул [Справочник по радиолокации. Под ред. М.Сколника, том 1, М., «Советское радио», 1976, с.28-29, формулы (1, 3)] в виде

где q0k, σ0k, R0k - заданные (известные) параметры РЛСk: соответственно пороговое отношение сигнал/шум q0k для цели с заданной ЭПР σ0k на дальности R0k, где при заданной вероятности ложной тревоги F обеспечивается заданная вероятность обнаружения D0 (Обычно в качестве типовых требований к РЛС задают: σ0k=1 м2, D0=0.5, F=10-6, при этом из (5) получим q0k=13 дБ. Исходя из этих данных выбирают РЛС, способную обеспечить вероятность обнаружения D0 на дальности R0k.);
gk - нормированное значение диаграммы направленности антенны РЛСk в направлении на цель, с учетом того, что на передачу и прием используется одна и та же антенна. С учетом формул (4, 5, 6) получим
Таким образом, для каждой из РЛСk, k=2, …, n, по формуле (7) оценивают вероятности обнаружения цели и выбирают РЛСm с наименьшим значением длины волны λm, которая сможет выполнить заданные требования Dm>D0 по вероятности обнаружения. Тогда информацию о цели передают РЛСm, которая обнаруживает и выполняет следующие операции: уточняет значение ЭПР цели σp при p=(m+1), …, n, оценивает по формуле (7) вероятность обнаружения цели с помощью РЛСp, …, РЛСn и выбирает ту РЛСp с наименьшим значением длины волны λp, которая сможет выполнить заданное требование по вероятности обнаружения Dp>D0. Процесс аналогично повторяется до тех пор, пока информация о цели не будет передана РЛСn, которая производит окончательное разрешение обнаруженных целей. В результате учета величины ЭПР информация об обнаруженной цели с РЛС1 передается не последовательно всем РЛС комплекса, а выборочно - только той РЛСm с наименьшей длиной волны, которая на данный момент способна обнаружить эту цель с заданной вероятностью и сопровождать ее. В предлагаемом способе время полного цикла будет равно

где  - суммарное время, которое могли бы затратить пропущенные РЛС на обработку цели (т.е. те РЛС, которые в способе-прототипе были бы задействованы в обработке цели),
- суммарное время, которое могли бы затратить пропущенные РЛС на обработку цели (т.е. те РЛС, которые в способе-прототипе были бы задействованы в обработке цели),  где tk - время, затраченное РЛСk, k=2, …, n-1, суммируется только время для пропущенных РЛС), количество которых будет определяться величиной ЭПР цели. Если величина ЭПР достаточна для обнаружения ее с помощью РЛСn на дальности обнаружения РЛС1, то время полного цикла будет равно
где tk - время, затраченное РЛСk, k=2, …, n-1, суммируется только время для пропущенных РЛС), количество которых будет определяться величиной ЭПР цели. Если величина ЭПР достаточна для обнаружения ее с помощью РЛСn на дальности обнаружения РЛС1, то время полного цикла будет равно 
Заявляемые изобретения иллюстрируются следующими чертежами.
На фиг.1 изображена структурная схема комплекса-прототипа, реализующего наиболее близкий способ.
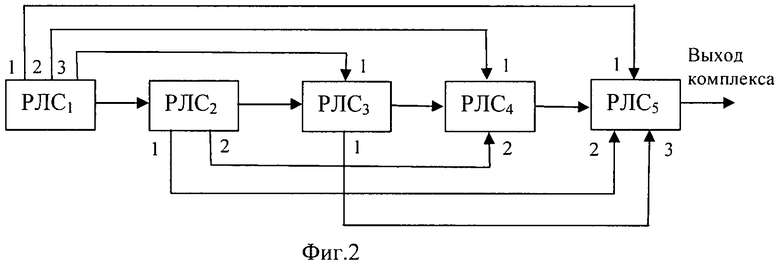
На фиг.2 изображена структурная схема заявляемого комплекса по п.2 формулы, реализующего заявляемый способ и состоящего из n=5 РЛС.
На фиг.3 изображена структурная схема заявляемого комплекса по п.3 формулы, реализующего заявляемый способ.
На фиг.4 показан пример реализации пункта управления по п.3 формулы.
Комплекс РЛС по п.2 формулы изобретения (фиг.2), реализующий заявляемый способ, содержит последовательно соединенные РЛС1, РЛС2, РЛС3, РЛС4 и РЛС5, при этом дополнительные выходы 1, 2, 3 РЛС1 соединены соответственно с дополнительными первыми входами РЛС3, РЛС4, РЛС5, дополнительные первый и второй выходы РЛС2 соединены соответственно со вторым дополнительным входом РЛС5 и со вторым дополнительным входом РЛС4, первый дополнительный выход РЛС3 соединен с третьим дополнительным входом РЛС5, выход РЛС5 является выходом комплекса.
Комплекс РЛС по п.2 формулы изобретения (фиг.2), реализующий заявляемый способ, работает следующим образом. После обнаружения цели с помощью РЛС1, согласно заявляемому способу, производят оценку ЭПР обнаруженной цели по формуле (3). Далее полученную величину ЭПР пересчитывают по формуле (4) для каждой РЛС комплекса - РЛСk, k>1, …, n, и для каждой РЛС комплекса рассчитывают вероятности обнаружения Dk, k>2, …, n, этой цели по формуле (7). Из (n-1) РЛС комплекса выбирают РЛСm с наименьшей длиной волны, для которой выполняются требования по вероятности обнаружения Dm≥D0, где D0 - заданная вероятность обнаружения. Информацию о цели передают выбранной РЛСm, с помощью которой осуществляет аналогичные операции и передают информацию той из (n-m-1) РЛС с наименьшей длиной волны, которая выполнит требования по вероятности обнаружения. Процесс продолжается до тех пор, пока информация не будет передана РЛСn комплекса, которая осуществляет окончательное разрешение целей. Поскольку передачу информации производят не последовательно по всей цепочке РЛС комплекса, а выборочно, лишь той РЛС, которая может выполнить требования по вероятности обнаружения цели, время перехода от РЛС с наибольшей длиной волны к РЛС с наименьшей длиной волны сокращается. Таким образом, реализуется технический результат (поставленная задача).
При достаточно большом количестве РЛС в комплексе (практически более 4-5) реализация комплекса становится достаточно сложной, так как потребуется большое количество связей, и на каждой РЛС должны производить вычисления по формулам (3-7), по каждой цели должны назначать РЛС с меньшей длиной волны, которая сможет обнаружить данную цель. Поэтому предложен другой вариант построения комплекса путем введения пункта управления в виде вычислительного центра и линий связи этого пункта управления, соединенных с каждой из РЛС.
Комплекс РЛС по п.3 формулы изобретения (фиг.3), реализующий заявляемый способ, содержит n>2 РЛС, n>2 линий связи (передачи данных), при этом входы-выходы каждой РЛС соединены линиями связи с соответствующими выходами-входами пункта управления, выход которого является выходом комплекса. В результате всю обработку, связанную с оценкой ЭПР, пересчетом ЭПР, расчетами вероятностей обнаружения для каждой из РЛС по формулам (3-7) и назначением РЛС для последующего обнаружения и сопровождения цели производят на пункте управления (Фиг.4). Такое построение комплекса упрощает его реализацию при большом количестве РЛС в комплексе.
Пункт управления (фиг.4) содержит запоминающее устройство (ЗУ) и вычислитель, при этом ЗУ имеет (n+1) входов и два выхода, а вычислитель имеет один вход и один выход, причем с первого по n-ый входы ЗУ соединены соответственно с первой по n-ю линиями связи (передачи данных), (n+1)-ый вход ЗУ соединен с выходом вычислителя, первый выход ЗУ соединен со входом вычислителя, а второй выход ЗУ является выходом пункта управления и комплекса РЛС.
Вычислитель реализует вычисления в соответствии с заявляемым способом и по формулам (3-7). При этом результаты расчетов хранятся в ЗУ, откуда они по команде вычислителя могут быть переданы по линиям связи на любую из РЛС комплекса, а также на выход комплекса к потребителю. Линии связи могут быть реализованы как радиолинии либо быть проводными.
Вычислитель может быть выполнен на стандартном вычислительном процессоре типа Pentium или Celeron [М.Гук. Аппаратные средства IBM PC, СПб.: Издательский дом «Питер», 2002, с.227-228].
Цифровое ЗУ выполнено на стандартных микросхемах [Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина, М.: «Радио и связь», 1984].
Комплекс РЛС по п.3 формулы изобретения (фиг.3), реализующий заявляемый способ, работает следующим образом. Вся информация об обнаруженных целях поступает на пункт управления и хранится в запоминающем устройстве (ЗУ). Управление записью и выдачей информации о целях, назначение РЛС, которой передается информация о цели, а также расчеты по формулам (3-7) осуществляют с помощью вычислителя. При этом последовательность операций и сами операции, реализующие заявляемый способ, аналогичны описанным для работы комплекса по п.2.
Таким образом, в результате заявленных технических решений сокращается время на обработку целей с достаточно большой ЭПР, что увеличивает дальность разрешения таких целей. Поставленная цель изобретения выполнена.



Заявляемые технические решения относятся к области радиолокации и могут быть использованы для контроля воздушного пространства и управления воздушным движением. Достигаемым техническим результатом является уменьшение времени перехода от РЛС с наибольшей длиной волны к РЛС с наименьшей длиной волны для целей с достаточно большой ЭПР, что позволяет увеличить дальность разрешения таких целей. Технический результат достигается тем, что в известном способе радиолокационного обзора пространства, основанном на разделении операций обнаружения и разрешения целей между РЛС1, РЛС2, …, PЛCn с длинами волн соответственно λ1>λ2>…>λn, где n>2, причем обзор пространства и первичное обнаружение целей осуществляют с помощью РЛС1, а окончательное разрешение обнаруженных РЛС1 целей осуществляет РЛСn, согласно изобретению, с помощью РЛСk, k=1, n-1, оценивают величину ЭПР обнаруженной цели и передают информацию о цели той из РЛСm с наименьшей длиной волны, m=(k+1), …, n, которая способна обнаружить цель с требуемой вероятностью. Предложены два варианта радиолокационных комплексов, реализующих заявленный способ. 3 н.п. ф-лы, 4 ил.
1. Способ радиолокационного обзора пространства, основанный на разделении операций обнаружения и разрешения целей между РЛС1, РЛС2, …, PЛCn с длинами волн соответственно λ1>λ2>…>λn, где n>2, причем обзор пространства и первичное обнаружение целей осуществляют с помощью РЛС1, а окончательное разрешение обнаруженных РЛС1 целей осуществляет РЛСn, отличающийся тем, что с помощью РЛСk, k=1, n-1, оценивают величину ЭПР обнаруженной цели и передают информацию о цели той из РЛСm с наименьшей длиной волны, m=(k+1), …, n, которая способна обнаружить цель с требуемой вероятностью.
2. Радиолокационный комплекс содержащий n>2 РЛС, причем длины волн РЛС1, РЛС2, …, PЛCn находятся в соотношении λ1>λ2>…>λn, при этом выход PЛCi, i=1, …, n-1, предназначенный для передачи данных об обнаруженных целях, соединен со входом РЛС(i+1), а выход РЛСn является выходом комплекса, отличающийся тем, что в каждую РЛСi дополнительно введены i-2 входов при i>2 и n-(i+1) выходов при i<(n-l), предназначенные для приема и передачи данных об обнаруженных целях, причем каждый из дополнительных выходов РЛСi соединен с одним из дополнительных входов РЛСj, j=i+2, …, n.
3. Радиолокационный комплекс содержащий n>2 РЛС, причем длины волн РЛС1, РЛС2, …, PЛCn находятся в соотношении λ1>λ2>…>λn, отличающийся тем, что дополнительно введен пункт управления, выполняющий расчеты параметров обнаруженных целей и назначение РЛС для последующего их обнаружения и сопровождения, входы-выходы пункта управления, предназначенные для приема-передачи данных о целях, соединены соответственно с выходами-входами РЛС комплекса, при этом выход пункта управления является выходом комплекса.
| САМОЛЕТ | 1996 |
|
RU2151716C1 |
| Способ получения нитровочно-кислотной смеси | 1945 |
|
SU67289A1 |
| РАЗНЕСЕННАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ | 2008 |
|
RU2374596C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ, КОМПЛЕКС РЛС ДЛЯ РЕАЛИЗАЦИИ СПОСОБА И РЛС ДЛЯ РЕАЛИЗАЦИИ КОМПЛЕКСА | 1998 |
|
RU2127436C1 |
| WO 2001027654 А1, 19.04.2001 | |||
| ГОРИЗОНТАЛЬНАЯ СПИРАЛЬНАЯ ВИБРОСУШИЛКА | 2006 |
|
RU2326299C1 |
| US 5631653 А, 20.05.1997 | |||
| US 5784026 А, 21.07.1998. | |||

