ОБЛАСТЬ ТЕХНИКИ
Раскрытое в настоящем описании изобретение относится к турбомашинам, а более конкретно, к насосам или компрессорам, особенно подходящим для перекачивания смешанной фазы, т.е. многофазных текучих сред, таких как смешанные газ и нефть.
УРОВЕНЬ ТЕХНИКИ
В морских установках для извлечения углеводородов из подводных месторождений нефти используются подводные газовые и масляные компрессоры и насосы. Подводные, забойные и ЭПН (электрические погружные насосы) турбомашины приводятся в действие электродвигателями, которые расположены соосно со ступенями турбомашин.
Поток, проходящий через турбомашину, обычно содержит смесь газообразных и жидких углеводородов, с переменной объемной долей газа (ОДГ) или объемной долей жидкости (ОДЖ). Как правило, через компрессор влажного газа пропускается влажный газ (т.е. газ, содержащий долю жидкости). Высокоскоростные центробежные компрессоры влажного газа обычно не могут выдерживать объемный процент жидкой фазы, больший чем 5%, то есть они требуют эксплуатации при ОДГ>95%. Таким образом, для удаления избыточного содержания жидкости из пропускаемого потока часто требуется наличие скрубберов-сепараторов больших размеров.
Наличие смешанного потока вызывает серьезные осложнения при пропускании текучей среды в турбомашине. Коэффициент полезного действия турбомашины, предназначенной для эксплуатации при расчетном значении ОДГ, быстро падает, когда машина работает далеко от расчетного значения ОДГ. Предполагая, что расчетное значение ОДГ равно 40%, коэффициент полезного действия может снизиться на 10 единиц при работе ниже 20% или выше 60%.
Для преодоления трудностей при пропускании потоков смешанного газа / жидкости, а конкретно, влажного газа с ОДГ>80%, было предложено (патент США №4830584) использовать многоступенчатые насосы и компрессоры с несколькими соосными ступенями, расположенными в корпусе турбомашины и приводимыми в действие двумя электродвигателями, расположенными снаружи корпуса турбомашины. Два коаксиальных вала приводят во вращение противоположно вращающиеся рабочие колеса многоступенчатой турбомашины. Количество ступеней, которое может быть использовано в таких турбомашинах, ограничено необходимостью уменьшения осевой длины машины. Это ограничивает достижимые перепад давления через турбомашину. Конструкция коаксиальных валов для приведения в действие вращающихся в противоположных направлениях рабочих колес повышает, однако, сложность турбомашины.
Предельно допустимая осевая длина узла турбомашина-электродвигатель, как правило, имеет значение в пределах 7 метров для подводного применения, также существенно ограничивая полную доступную мощность. По сути дела, электродвигатели с выходной мощностью выше 4 МВт могут быть длиннее, чем разрешено указанными выше пределами, если только не используется очень высокая скорость вращения, что отрицательно сказывается на сроке службы турбомашины.
Существует, таким образом, потребность в создании более эффективной турбомашины для пропускания смешанного потока газа / жидкости, которая, по меньшей мере частично, устраняет один или несколько из указанных выше недостатков турбомашин предшествующего уровня техники.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с одним аспектом, предложена многоступенчатая турбомашина, содержащая корпус с впускным отверстием для текучей среды и выпускным отверстием для текучей среды; несколько ступеней, расположенных в корпусе; проточный канал, проходящий от впускного отверстия для текучей среды к выпускному отверстию для текучей среды через указанные последовательно расположенные ступени. Каждая ступень состоит из вращающегося рабочего колеса и электродвигателя, встроенного в корпус и расположенного с возможностью вращения рабочего колеса с управляемой скоростью вращения. Каждый электродвигатель содержит ротор, расположенный на рабочем колесе и вращающийся с ним как одно целое, и статор, неподвижно расположенный в корпусе. Пары последовательно расположенных рабочих колес выполнены с возможностью вращения в противоположных направлениях. Спаренные рабочие колеса, вращающиеся в противоположных направлениях, предпочтительно расположены непосредственно рядом друг с другом. Термин «непосредственно рядом друг с другом» означает, что между ними не расположены никакие неподвижные лопасти или лопатки. Текучая среда, выходящая из верхнего по потоку рабочего колеса, поступает непосредственно в нижнее по потоку рабочее колесо. В некоторых вариантах выполнения турбомашина полностью свободна от неподвижных лопаток между последовательно расположенными, вращающимися в противоположных направлениях рабочими колесами, уменьшая, тем самым, общую длину турбомашины.
В некоторых вариантах выполнения все рабочие колеса турбомашины вращаются в противоположных направлениях, то есть каждое рабочее колесо вращается в направлении, противоположном по отношению к соседнему рабочему колесу (колесам). В других вариантах выполнения настоящего изобретения устройство может дополнительно содержать также последовательно расположенные рабочие колеса, которые вращаются в одном и том же направлении, с расположенными между ними неподвижными лопастями или лопатками.
В соответствии с некоторыми вариантами выполнения, турбомашина содержит устройство управления, выполненное с возможностью индивидуального управления рабочими условиями каждого электродвигателя. Устройство управления может быть запрограммировано вращать каждый встроенный электродвигатель и, таким образом, каждое рабочее колесо, со скоростью вращения, которая может варьироваться от одного рабочего колеса к другому, основываясь, например, на объемной доле газа в текучей среде, пропускаемой через турбомашину. Устройство управления может состоять из одного или нескольких блоков управления.
Следует понимать, что в особенно предпочтительных вариантах выполнения турбомашина содержит только такие рабочие колеса, каждое из которых имеет свой собственный независимо управляемый встроенный электродвигатель. В других вариантах выполнения, однако, два или большее количество вспомогательных или дополнительных рабочих колес могут управляться с помощью одного и того же электродвигателя или с помощью двух различных электродвигателей, но совместно вращающихся с одинаковой скоростью вращения. Объем настоящего изобретения, следовательно, также охватывает турбомашины, в которых независимые друг от друга рабочие колеса с управляемой скоростью вращения могут быть объединены с другими рабочими колесами, которые не являются независимо управляемыми, по меньшей мере в отношении их скорости вращения.
В некоторых вариантах выполнения управление встроенными электродвигателями может представлять собой управление крутящим моментом или управление скоростью вращения. Например, блок управления может быть запрограммирован для управления скоростью электродвигателей в зависимости от по меньшей мере одного параметра, связанного с коэффициентом сжатия, например, в зависимости от коэффициента сжатия текучей среды, пропускаемой через турбомашину, поскольку коэффициент сжатия изменяется в зависимости от объемной доли газа.
В некоторых вариантах выполнения турбомашина может не иметь вала, или может содержать центральный, не вращающийся вал, поддерживающий с возможностью вращения рабочие колеса и соответствующие роторы встроенных электродвигателей. Могут быть использованы активные магнитные подшипники, подшипники качения, подшипники скольжения или их комбинации. Особенно предпочтительными могут быть самосмазывающиеся подшипники.
Статор электродвигателя, по меньшей мере некоторых из ступеней, может быть расположен вокруг соответствующего ротора электродвигателя, установленного на рабочем колесе таким образом, что статор окружает ротор. Ротор электродвигателя и рабочее колесо каждой ступени могут с возможностью вращения поддерживаться статором электродвигателя, а не центральным валом. В некоторых вариантах выполнения может быть предусмотрена обратная конструкция, когда статор расположен по центру, а ротор и соответствующее рабочее колесо окружают статор.
Турбомашина может содержать несколько расположенных последовательно рабочих колес осевого типа. В некоторых вариантах выполнения все ступени содержат рабочие колеса осевого типа. В других вариантах выполнения турбомашина может содержать одно или несколько рабочих колес радиального типа или осецентробежных рабочих колес, например, расположенных в секции машины, размещенной ниже по потоку от первой секции машины, содержащей рабочие колеса осевого типа.
Далее описаны признаки и варианты выполнения, которые также дополнительно изложены в прилагаемой формуле изобретения, являющейся неотъемлемой частью настоящего описания. Приведенная выше сущность изобретения излагает признаки различных вариантов выполнения настоящего изобретением, с тем, чтобы последующее подробное описание могло быть лучше понято, и с тем, чтобы мог быть лучше понят вклад в уровень техники. Имеются, конечно, и другие признаки настоящего изобретения, которые будут описаны ниже и которые будут изложены в прилагаемой формуле изобретения. В связи с этим, переходя к подробному объяснению нескольких вариантов выполнения настоящего изобретения, следует иметь в виду, что различные варианты выполнения настоящего изобретения не ограничены в своем применении деталями конструкции и расположением элементов, как изложено в последующем описании или проиллюстрировано на чертежах. Изобретение допускает другие варианты выполнения и может быть осуществлено и осуществляется различными способами. Кроме того, следует понимать, что фразеология и терминология, используемые в данном документе, приведены в целях описания и не должны рассматриваться как ограничивающие.
Таким образом, специалистам в данной области техники будет понятно, что концепция, на которой основано изобретение, может быть легко использована в качестве основы для разработки других конструкций, способов и/или систем для достижения нескольких целей настоящего изобретения. Важно, поэтому, чтобы формула изобретения рассматривалась как включающая такие эквивалентные конструкции, до тех пор, пока они не отклоняются от сущности и объема настоящего изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Более полная оценка раскрытых вариантов выполнения настоящего изобретения и многие из сопутствующих преимуществ будут легко получены, когда они станут понятны со ссылкой на последующее подробное описание при рассмотрении в связи с прилагаемыми чертежами, на которых:
Фиг. 1 иллюстрирует осевой разрез турбомашины, выполненной в соответствии с одним вариантом выполнения настоящего изобретения;
Фиг. 2 иллюстрирует в увеличенном масштабе вид, изображенный на Фиг. 1;
Фиг. 3 иллюстрирует осевой разрез турбомашины, выполненной в соответствии с другим вариантом выполнения настоящего изобретения;
Фиг. 4 иллюстрирует в увеличенном масштабе вид, изображенный на Фиг. 3;
Фиг. 5 иллюстрирует осевой разрез турбомашины, выполненной в соответствии с другим вариантом выполнения настоящего изобретения;
Фиг. 6 иллюстрирует фрагмент вида, показанного на Фиг. 5, в увеличенном масштабе;
Рис. 7 иллюстрирует осевой разрез турбомашины, выполненной в соответствии с еще одним вариантом выполнения настоящего изобретения;
Фиг. 8 иллюстрирует фрагмент вида, показанного на Фиг. 7, в увеличенном масштабе;
Фиг. 9 иллюстрирует осевой разрез турбомашины, выполненной в соответствии с еще одним вариантом выполнения настоящего изобретения;
Фиг. 10 иллюстрирует фрагмент вида, показанного на Фиг. 9, в увеличенном масштабе;
Фиг. 11 иллюстрирует осевой разрез иллюстративного варианта выполнения турбомашины смешанного осевого и радиального типа, выполненной в соответствии с настоящим изобретением;
Фиг. 12 иллюстрирует принципиальную схему турбомашины, выполненной в соответствии с настоящим изобретением, имеющей ниже по потоку сепаратор жидкости / газа;
Фиг. 13 иллюстрирует принципиальную схему электропитания турбомашины, выполненной в соответствии с вариантами выполнения настоящего изобретения;
Фиг. 14 иллюстрирует частичный вид спереди статора электродвигателя, выполненного в соответствии с вариантами выполнения настоящего изобретения;
Фиг. 15 иллюстрирует схематический вид спереди электродвигателя со встроенными постоянными магнитами, выполненного в соответствии с некоторыми вариантами выполнения изобретения, раскрытыми в настоящем документе;
Фиг. 16 иллюстрирует схематический вид спереди встроенного реактивного электродвигателя, выполненного в соответствии с дальнейшими вариантами выполнения настоящего изобретения;
Фиг. 17 иллюстрирует вид в продольном разрезе турбомашины, выполненной в соответствии с еще одним вариантом выполнения изобретения, в которой электронные устройства управления для встроенных электродвигателей расположены на одном конце турбомашины;
Фиг. 18 иллюстрирует вид в продольном разрезе еще одного варианта выполнения турбомашины, выполненной в соответствии с изобретением, в которой оси впускного и выпускного коллекторов в осевом направлении совпадают;
Фиг. 19 иллюстрирует в увеличенном масштабе фрагмент вариантов выполнения турбомашины, выполненной в соответствии с настоящим изобретением с конструкцией для охлаждения статоров встроенных электродвигателей;
Фиг. 20 иллюстрирует вид в поперечном разрезе, показывающий вариант выполнения, содержащий активные магнитные подшипники, поддерживающие рабочие колеса;
Фиг. 21 и 22 иллюстрируют диаграммы скоростей вращения последовательно расположенных ступеней турбомашин для различных процентов объемной доли газа в текучей среде, пропускаемой через турбомашину в различных вариантах выполнения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
Последующее подробное описание иллюстративных вариантов выполнения приведено со ссылкой на прилагаемые чертежи. Одни и те же ссылки на разных чертежах обозначают одинаковые или аналогичные элементы. Кроме того, чертежи не обязательно выполнены в масштабе. Кроме того, последующее подробное описание не ограничивает изобретение. Вместо этого, объем изобретения определяется прилагаемой формулой изобретения.
Ссылка во всем описании на «один вариант выполнения» или «вариант выполнения» или «некоторые варианты выполнения» означает, что конкретный признак, конструкция или характеристика, описанные в связи с вариантом выполнения, содержатся в по меньшей мере одном раскрытом варианте выполнения настоящего изобретения. Таким образом, появление фразы «в одном варианте выполнения изобретения» или «в одном варианте выполнения» или «в некоторых вариантах выполнения» в различных местах по всему описанию не обязательно относится к одному и тому же варианту выполнения. Кроме того, конкретные признаки, конструкции или характеристики могут быть объединены любым подходящим образом в одном или нескольких вариантах выполнения.
Фиг. 1 и 2 иллюстрируют варианты выполнения турбомашины, выполненной в соответствии с настоящим изобретением. Турбомашина в целом имеет номер позиции 1 и содержит наружный корпус 3 с впускным коллектором 5 и выпускным коллектором 7.
Турбомашина может иметь корпус с вертикальным разъемом или с горизонтальным разъемом. В варианте выполнения, показанном на Фиг. 1, турбомашина имеет корпус с вертикальным разъемом, причем корпус 3 состоит из центрального цилиндра 3А и двух концевых частей 3B, 3C, герметично соединенных друг с другом с образованием корпуса 3.
Турбомашина 1 может представлять собой компрессор влажного газа или многофазный насос и, в целом, турбомашина годится для повышения давления многофазной текучей среды, например, жидкости, содержащей некоторый процент сжимаемого газа, или же газа, содержащего некоторый процент жидкости. Фиг. 1 и 2 более конкретно иллюстрируют многофазный насос, пригодный для пропускания потока жидкости, содержащего некоторый процент газообразной среды.
В некоторых вариантах выполнения, как показано на Фиг. 1 и 2, турбомашина 1 представляет собой, в целом, машину осевого типа. Турбомашина 1 может состоять из приемной камеры 9, находящейся в проточном сообщении с впускным коллектором 5, и выпускной камеры 11, находящейся в проточном сообщении с выпускным коллектором 7. Пропускаемая текучая среда протекает через турбомашину в целом в осевом направлении, из приемной камеры 9 в направлении выпускной камеры 11, через несколько ступеней 13А, 13В.
В предпочтительных вариантах выполнения турбомашина 1 содержит четное число ступеней, расположенных попарно, причем каждая пара содержит первую ступень 13А и вторую ступень 13В, расположенные последовательно в направлении потока. Как будет описано более подробно ниже, каждая ступень содержит вращающееся рабочее колесо, приводимое во вращение с помощью соответствующего встроенного электродвигателя. Преимущественно, рабочие колеса двух последовательно расположенных ступеней каждой пары вращаются в противоположных направлениях, то есть они выполнены и управляются с возможностью вращения в двух противоположных направлениях, одно в направлении по часовой стрелке, а другое в направлении против часовой стрелки. В каждой паре ступеней первое, т.е. наиболее верхнее по потоку рабочее колесо вращается в одном и том же направлении, а второе, то есть наиболее нижнее по потоку рабочее колесо вращается в другом направлении, так что за каждым рабочим колесом, вращающимся в одном направлении, всегда следует следующее рабочее колесо, вращающееся в противоположном направлении.
Как это лучше всего показано на Фиг. 2, все еще со ссылкой на Фиг. 1, каждая ступень 13А, 13В содержит рабочее колесо 15А, 15В. Рабочие колеса 15А, 15В имеют соответствующие лопатки 17А, 17В. Каждая лопатка 17А, 17В рабочего колеса может иметь корневую часть, аэродинамическую часть и венец. Венцы кольцеобразно расположенных лопаток 17А, 17В каждого рабочего колеса образуют наружное кольцо или бандаж 19А, 19В. В некоторых вариантах выполнения кольцо или бандаж 19А, 19В могут быть образованы из монолитных элементов. Точно так же, корневые части 21А, 21В лопаток 17А, 17В каждого рабочего колеса могут образовывать сплошное кольцо.
В некоторых вариантах выполнения каждое рабочее колесо 15А, 15В поддерживается посредством соответствующих подшипниковых узлов 23А, 25А и 23В, 25В на внутреннем валу 27. Вал 27 может быть неподвижно установлен в корпусе 3. Как схематически показано на Фиг. 2, подшипниковый узел 23А, 25А и 23В, 25В может иметь комбинированную радиальную и осевую допустимую нагрузку, то есть они могут поддерживать как осевые, так и радиальные нагрузки. В соответствии с некоторыми вариантами выполнения, подшипниковые узлы 23А, 25А, 23В, 25В могут смазываться и охлаждаться посредством жидкой составляющей текучей среды, протекающей в турбомашине 1.
Каждое рабочее колесо 15А, 15В может вращаться на валу 27 независимо от других рабочих колес так, что последовательно расположенные рабочие колеса могут вращаться в противоположных направлениях и с разными угловыми скоростями.
Каждая ступень 13А, 13В приводится во вращение с помощью соответствующего встроенного электродвигателя. В соответствии с раскрытыми в настоящем документе вариантами выполнения, могут быть использованы электродвигатели с постоянными магнитами (сокращенно РМ-электродвигатели). Также могут быть также использованы коммутируемые или синхронные реактивные электродвигатели, или электродвигатели с переменным магнитным сопротивлением.
Каждый электродвигатель состоит из ротора 31А, 31В, который вращается как одно целое с соответствующим рабочим колесом 15А, 15В, и из статора 33A, 33В, который неподвижен относительно корпуса 3 турбомашины 1. Как показано на Фиг. 1 и 2, ротор 31А, 31В и статор 33A, 33В каждого встроенного электродвигателя имеют радиальное расположение, причем один из них окружает другой. В варианте выполнения, изображенном на Фиг. 1 и 2, статор электродвигателя расположен снаружи ротора электродвигателя, т.е. статор 33A, 33В электродвигателя окружает соответствующий ротор 31А, 31В электродвигателя. Как будет описано позже, также может быть предусмотрен обратный порядок расположения, в котором ротор электродвигателя окружает соответствующий статор электродвигателя.
В некоторых вариантах выполнения ротор 31А, 31В электродвигателя может быть размещен в бандаже 19А, 19В соответствующего рабочего колеса 15А, 15В или частично им образован, и может состоять из постоянных магнитов 32А, 32В. Каждый статор 33A, 33В электродвигателя содержит несколько электромагнитов, образованных соответствующими ферромагнитными сердечниками или магнитопроводами 35А, 35В и намотанными вокруг них электрическими обмотками 37А, 37В. В соответствии с некоторыми вариантами выполнения, как лучше всего показано на Фиг. 14 и 15, каждый магнитопровод 35А, 35В статора 33A, 33В электродвигателя может содержать два проходящих радиально плеча 36, вокруг которых намотаны электрические обмотки 37А, 37В. В варианте выполнения, изображенном на Фиг. 1 и 2, плечи 36 ориентированы радиально внутрь, причем их концы, которые могут иметь соответствующие расширяющиеся части 36Х (Фиг. 14, 15), обращены к соответствующему ротору 31А, 31В электродвигателя. Магнитопроводы могут быть изготовлены из ферромагнитного материала, например, сложенных листов ферромагнитного металла. Магнитопроводы образуют модульную конструкцию для статора электродвигателя.
Преимущественно, статоры 33A, 33В электродвигателя могут быть изолированы от внутреннего пространства корпуса, в котором расположены рабочие колеса 15А, 15В и роторы 31А, 31В электродвигателя. Например, между наружным корпусом 3 и внутренним кожухом 41 может быть выполнен один непроницаемый для жидкости кольцеобразный корпус 39, причем в этом корпусе 39 размещены статоры 33A, 33В электродвигателя. В других вариантах выполнения настоящего изобретения статор 33A, 33В электродвигателя каждой ступени 13А, 13В может герметичным от жидкости образом быть размещен в отдельном корпусе. В дальнейших вариантах выполнения может быть предусмотрено несколько корпусов, непроницаемых для жидкости, причем каждый из них вмещает два или большее количество статоров 33A, 33В последовательно расположенных ступеней 13А, 13В.
Ниже, в связи с некоторыми вариантами выполнения, будут описаны более подробно дополнительные компоненты и элементы турбомашины и соответствующие встроенные электродвигатели.
На Фиг. 3 проиллюстрирован разрез в плоскости, содержащей ось А-А вращения рабочих колес турбомашины 1, выполненной в соответствии с дальнейшими иллюстративными вариантами выполнения изобретения. На Фиг. 4 в увеличенном масштабе показана одна ступень турбомашины 1, выполненной в соответствии с вариантом выполнения, изображенным на Фиг. 3. Одинаковые или соответствующие компоненты или элементы, показанные на Фиг. 1 и 2, обозначены одними и теми же номерами позиций.
В соответствии с Фиг. 3 и 4, турбомашина 1 снова содержит корпус 3, состоящий из трех частей 3A, 3B и 3C. Корпус 3 имеет впускной коллектор 5 и выпускной коллектор 7, а также приемную камеру 9 и выпускную камеру 11. Несколько ступеней 13А, 13В последовательно расположены в корпусе 3 от приемной камеры 9 до выпускной камеры 11. Каждая ступень 13А, 13В содержит соответствующее рабочее колесо 15А, 15В с лопатками 17А, 17В. Центральный неподвижный вал 27 может быть расположен в корпусе 3 и проходить через ступени 13А, 13В. Каждая ступень 13А, 13В содержит встроенный электродвигатель, состоящий из статора 33A, 33В, неподвижно расположенного в корпусе 3, и ротора 31А, 31В, вращающегося как одно целое и поддерживаемого соответствующими рабочими колесами 15А, 15В.
В соответствии с Фиг. 3 и 4, каждое рабочее колесо 15А, 15В может поддерживаться на своей наружной периферии соответствующим статором 33А, 33В электродвигателя, посредством подшипниковых узлов 51А, 53А, 51В, 53В. Подшипниковые узлы 51А, 53А, 51В, 53В могут быть расположены между наружным бандажом 19А, 19В каждого рабочего колеса 15А, 15В и внутренней частью статора 33А, 33В электродвигателя. Чтобы обеспечить посадочные места для подшипников, каждый статор 33А, 33В электродвигателя может иметь свой собственный корпус 42, который может быть закрыт оболочкой или кожухом 44. Посадочные места для наружных колец или обойм подшипниковых узлов 51А, 53А; 51В, 53В могут быть выполнены в обращенной внутрь поверхности кожухов 44. В некоторых вариантах выполнения подшипниковые узлы 51А, 53А, 51В, 53В могут охлаждаться той же самой текучей средой, которая проходит через турбомашину 1.
Фиг. 5 и 6 иллюстрируют еще один вариант выполнения турбомашины, выполненной в соответствии с настоящим изобретением. Одни и те же номера позиций обозначают одинаковые или соответствующие детали или элементы, что и на Фиг. 1 и 2. Фиг. 5 и 6 отличаются от Фиг. 1 и 2 подшипниками, используемыми для поддержки каждого рабочего колеса 15А, 15В. Как лучше всего показано на фрагменте, изображенном на Фиг. 6 в увеличенном масштабе, каждое рабочее колесо 15А, 15В поддерживается подшипниками 55А, 56А, 55В, 56В качения. В иллюстративном варианте выполнения, показанном на Фиг. 5 и 6, для обеспечения комбинированной радиальной и осевой допустимой нагрузки используются два противоположных однорядных радиально-упорных шарикоподшипника. Также возможны и другие подшипниковые узлы, обеспечивающие комбинированную осевую и радиальную допустимую нагрузку, например, с другим количеством подшипников и/или с другим типом или количеством элементов качения. Для ограничения или предотвращения утечек технологической текучей среды в направлении подшипников может быть предусмотрено механическое уплотнение 57.
Фиг. 7 и 8 иллюстрируют другой иллюстративный вариант выполнения турбомашины, выполненной в соответствии с настоящим изобретением. Одни и те же номера позиций используются для обозначения компонентов, частей и элементов, соответствующих показанным на Фиг. 1-6. В варианте выполнения, показанном на Фиг. 7 и 8, порядок расположения ротора и статора электродвигателя каждой ступени изменен на обратный, когда статор электродвигателя расположен внутри ротора электродвигателя и рабочего колеса, окружающего статор.
Более конкретно, турбомашина 1, изображенная на Фиг. 7 и 8, содержит наружный корпус 3 с впускным коллектором 5 и выпускным коллектором 7, которые могут проточно сообщаться, соответственно, с приемной камерой 9 и выпускной камерой 11. В иллюстративном варианте выполнения, показанном на Фиг. 7 и 8, турбомашина 1 имеет корпус с вертикальным разъемом и состоит из центрального цилиндра 3A и двух концевых частей 3B, 3C, образующих вместе корпус 3. В других вариантах выполнения, которые не показаны, турбомашина может иметь корпус с горизонтальным разъемом.
На Фиг. 7 и 8 турбомашина вновь представлена в виде турбомашины 1 осевого типа. Рабочая текучая среда протекает через турбомашину 1 в целом в осевом направлении от приемной камеры 9 к выпускной камере 11, через несколько ступеней 13А, 13В. В предпочтительных вариантах выполнения турбомашина 1 содержит четное число ступеней, расположенных попарно, причем каждая пара содержит первую ступень 13А и вторую ступень 13В, расположенные последовательно и выполненные и управляемые с возможностью вращения в противоположных направлениях.
В некоторых вариантах выполнения турбомашина 1 может иметь нечетное число ступеней, и в этом случае рабочие колеса первой и последней ступеней вращаются в одном направлении. Предпочтительно, однако, турбомашина 1 содержит четное число рабочих колес.
Как лучше всего показано на Фиг. 8, все еще со ссылкой на Фиг. 7, каждая ступень 13А, 13В содержит рабочее колесо 15А, 15В. Рабочие колеса 15А, 15В имеют соответствующие лопатки 17А, 17В. Каждая лопатка 17А, 17В рабочего колеса может состоять из корневой части, аэродинамической части, которая заканчивается венцом на радиальном наружном конце лопатки. Корневые части кольцеобразно расположенных лопаток 17А, 17В каждого рабочего колеса 15А, 15В образуют внутреннее кольцо 22А, 22В. В некоторых вариантах выполнения внутреннее кольцо 22А, 22В может быть образовано монолитным компонентом.
Каждая ступень 13А, 13В приводится во вращение с помощью соответствующего встроенного электродвигателя. Каждый электродвигатель состоит из ротора 31А, 31В и неподвижного статора 33А, 33В. Ротор 31А, 31В электродвигателя выполнен на и вращается как одно целое с соответствующим рабочим колесом 15А, 15В. В отличие от ранее описанных вариантов выполнения, в турбомашине, показанной на Фиг. 7 и 8, каждый встроенный электродвигатель расположен внутри кольцеобразной конструкции лопаток 17А, 17В, а статор 33А, 33В электродвигателя расположен внутри ротора электродвигателя.
В некоторых вариантах выполнения ротор 31А, 31В электродвигателя может быть размещен во внутреннем кольце 22А, 22В соответствующего рабочего колеса 15А, 15В, или частично им образован, и может состоять из постоянных магнитов 32А, 32В. В других вариантах выполнения, в которых вместо электродвигателя с постоянным магнитом используется электродвигатель с переменным магнитным сопротивлением или коммутируемый реактивный электродвигатель, внутреннее кольцо 22А, 22В каждого рабочего колеса могут быть выполнено из ферромагнитного материала с барьерами магнитного потока.
Каждый статор 33А, 33В электродвигателя неподвижно расположен в корпусе 3 внутри соответствующего ротора. Статоры 33А, 33В могут неподвижно поддерживаться центральным неподвижным, то есть не вращающимся валом 27. Каждый статор 33А, 33В электродвигателя содержит несколько электромагнитов, образованных соответствующими ферромагнитными сердечниками или магнитопроводами 35А, 35В и электрическими обмотками 37А, 37В, намотанными вокруг них. Каждый магнитопровод может иметь один или несколько проходящих радиально наружу плеч, вокруг которых намотаны обмотки 37А, 37В.
В некоторых вариантах выполнения каждое рабочее колесо 15А, 15В поддерживается на статоре 33А, 33В соответствующего встроенного электродвигателя соответствующими подшипниковыми узлами 24А, 26А и 24В, 26В. Как схематически показано на Фиг. 8, подшипниковые узлы 24А, 26А и 24В, 26В могут иметь комбинированную радиальную и осевую допустимые нагрузки, т.е. они могут поддерживать как осевые, так и радиальные нагрузки.
Каждое рабочее колесо 15А, 15В может вращаться вокруг оси А-А вращения со скоростью, которая отличается от скорости вращения соседнего рабочего колеса, по меньшей мере в отношении направления и/или модуля скорости.
Преимущественно, статоры 33А, 33В электродвигателя изолированы от внутренней части корпуса 3, где расположены рабочие колеса 15А, 15В. Для лучшей установки подшипниковых узлов 24А, 26А, 24В, 26В, каждый статор 33А, 33В электродвигателя может быть заключен в отдельную оболочку или кожух, на наружной поверхности которого выполнены посадочные места для подшипников. На Фиг. 8 кожуха обозначены номерами позиций 44А, 44В, а сформированное таким образом внутреннее посадочное место, вмещающее соответствующий статор 33А, 33В электродвигателя, обозначено номерами позиций 42А, 42В. Для предотвращения утечки технологической текучей среды в посадочные места 42А, 42В статоров 33A, 33В каждое посадочное место предпочтительно выполнено непроницаемым для жидкости.
Фиг. 9 и 10 иллюстрируют еще один вариант выполнения турбомашины, выполненной в соответствии описанным в настоящем документе изобретением. Подобные или эквивалентные части и компоненты обозначены теми же самыми номерами позиций, что и на чертежах, описанных выше. Турбомашина 1, изображенная на Фиг. 9 и 10, представляет собой, в целом, машину осевого типа, имеющую корпус 3 с впускным коллектором 5 и выпускным коллектором 7. Турбомашина 1 может дополнительно содержать приемную камеру 9, проточно сообщающуюся с впускным коллектором 5, и выпускную камеру 11, проточно сообщающуюся с выпускным коллектором 7. Рабочая текучая среда протекает через турбомашину, в целом, в осевом направлении от приемной камеры 9 к выпускной камере 11 через несколько последовательно расположенных ступеней 13А, 13В.
Каждая ступень 13А, 13В содержит вращающееся рабочее колесо 15А, 15В, приводимое во вращение с помощью соответствующего встроенного электродвигателя, состоящего из ротора 31А, 31В, вращающегося за одно целое с соответствующим рабочим колесом 15А, 15В, и статора 33A, 33В, неподвижно расположенного в корпусе 3. В варианте выполнения, изображенном на Фиг. 9 и 10, статор 33A, 33В электродвигателя каждой ступени 13А, 13В расположен в радиальном направлении снаружи относительно рабочего колеса 15А, 15В, и окружает соответствующий ротор 31А, 31В электродвигателя.
Предпочтительно, предусмотрено четное число ступеней 13А, 13В и ступени выполнены спаренными, при этом рабочие колеса двух последовательно расположенных ступеней каждой пары вращаются в противоположных направлениях, то есть они выполнены и управляются с возможностью вращения в двух противоположных направлениях, соответственно, по часовой стрелке и против часовой стрелки. Как и в ранее описанных вариантах выполнения, скоростью встроенных электродвигателей и, тем самым, ступеней, можно управлять независимо друг от друга, так что скорость вращения каждой ступени может быть оптимизирована, в соответствии со способами управления, которые будут описаны более подробно позже.
Каждое рабочее колесо 15А, 15В имеет соответствующие лопатки 17А, 17В, расположенные по кругу или в кольцеобразном расположении. Каждая лопатка 17А, 17В рабочего колеса может иметь корневую часть, аэродинамическую часть и венец. Венцы кольцеобразно расположенных лопаток 17А, 17В каждого рабочего колеса 15А, 15В образуют наружное кольцо или бандаж 19А, 19В. В некоторых вариантах выполнения кольцо или бандаж 19А, 19В могут быть образованы монолитным компонентом. Ротор электродвигателя каждой ступени предпочтительно выполнен в наружном бандаже соответствующего рабочего колеса 15А, 15В, или поддерживается им. Ротор 31А, 31В электродвигателя может содержать постоянные магниты 32А, 32В, взаимодействующие с электромагнитами, формирующими статор 33A, 33В электродвигателя. Например, постоянные магниты 32А, 32В могут быть встроены в наружную кольцеобразную часть бандажа 19А, 19В соответствующего рабочего колеса 15А, 15В.
Корневые части каждого лопаточного аппарата каждого рабочего колеса 15А, 15В могут образовывать монолитный центральный сердечник 28А, 28В.
Аналогично вариантам выполнения, изображенным на Фиг. 3 и 4, каждое рабочее колесо 15А, 15В может поддерживаться на наружной периферии соответствующим статором 33A, 33В электродвигателя, посредством подшипникового узла 51А, 53А, 51В, 53В. Подшипниковый узел может иметь комбинированную радиальную и осевую допустимые нагрузки.
Подшипниковые узлы 51А, 53А, 51В, 53В могут быть расположены между наружным бандажом 19А, 19В каждого рабочего колеса 15А, 15В и внутренней поверхностью статора 33A, 33В электродвигателя. Каждый статор 33A, 33В электродвигателя может быть размещен в соответствующем корпусе 42, ограниченным, например, кожухом 44, который отделяет статор 33A, 33В электродвигателя от окружающей среды. Посадочные места для наружных колец или обойм подшипниковых узлов 51А, 53А; 51В, 53В могут быть сформированы в обращенной вовнутрь поверхности кожуха 44. В некоторых вариантах выполнения подшипниковые узлы 51А, 53А, 51В, 53В могут смазываться и охлаждаться с помощью той же самой текучей среды, которая пропускается через турбомашину 1.
Описанные выше варианты выполнения относятся к осевым турбомашинам. Другие варианты выполнения изобретения, описанные в настоящем документе, могут включать турбомашину радиального типа или турбомашину комбинированного осевого и радиального типа.
На Фиг. 11 проиллюстрирован иллюстративный вариант выполнения турбомашины комбинированного осевого и радиального типа, выполненной в соответствии с настоящим изобретением. Как показано на Фиг. 11, турбомашина комбинированного осевого и радиального типа, обозначенная в целом номером позиции 1, может состоять из первой секции 1А и второй секции 1В, которые расположены последовательно между впускным коллектором и выпускным коллектором, которые не показаны.
В варианте выполнения, показанном на Фиг. 11 первая секция 1А машины имеет несколько ступеней осевого типа. Каждая ступень может быть выполнена, как описано выше в связи с любым чертежом из Фиг. 1-10. В иллюстративном варианте выполнения, изображенном на Фиг. 11, ступени осевого типа выполнены таким же образом, что и ступени турбомашины 1, показанной на Фиг. 1 и 2. Для обозначения одинаковых или соответствующих частей и элементов, которые не будут описаны снова, используются одни и те же номера позиций. В других вариантах выполнения первая секция 1А турбомашины может содержать ступени, выполненные в соответствии с вариантами выполнения, показанными на Фиг. 3-10.
Вторая секция 1В машины может состоять из нескольких ступеней радиального или комбинированного типа. Следует понимать, что в контексте настоящего описания и прилагаемой формулы изобретения, при ссылках на турбомашину термины «осевой тип» и «радиальный тип» относятся к направлению потока через машину. Как было отмечено выше в связи с Фиг. 1-10, расположение ротора и статора встроенного электродвигателя в ступени машины осевого типа является радиальным, то есть они расположены радиально один внутри другого. Это также имеет место в секции 1А турбомашины комбинированного типа, изображенной на Фиг. 11. С другой стороны, в секции 1В турбомашины комбинированного типа, изображенной на Фиг. 11, где поток является радиальным, например, центробежным, встроенный электродвигатель каждой центробежной ступени расположен в осевом направлении, в том смысле, что оси статора электродвигателя и ротора электродвигателя совмещены вдоль оси вращения турбомашины.
В частичном виде на Фиг. 11 показаны только три ступени осевого типа в секции 1А машины и две ступени радиального типа в секции 1В машины, но специалистам в данной области техники будет понятно, что в каждой из двух секций 1А и 1В машины может быть предусмотрено различное число ступеней. Между двумя секциями один возможный вариант выполнения содержит неподвижную секцию для изменения направления потока перед входом в следующую ступень. Изменяющие направление потока элементы неподвижной секции для изменения направления потока могут содержать неподвижные лопатки, как показано, например, на Фиг. 11 номером позиции 66.
Указанные две ступени радиального типа, изображенные на Фиг. 11, обозначены номерами позиций 61А и 61В. Неподвижный вал 63 может проходить через турбомашину и поддерживает вращающиеся ступени обеих секций 1А и 1В машины. В некоторых вариантах выполнения ступени 61А, 61В секции 1В машины могут быть идентичными или аналогичными. Каждая ступень содержит соответствующее рабочее колесо 65А, 65В. В соответствии с предпочтительными вариантами выполнения, рабочие колеса 65А, 65В ступеней вращаются в одном направлении. Также могут быть предусмотрены конструкции с противоположным вращением рабочего колеса. В соответствии с некоторыми вариантам выполнения, скоростью вращения каждой ступени 61А, 61В можно управлять независимо от других ступеней, так что каждая ступень может вращаться со своей скоростью.
Вал 63 может быть монолитным. В других вариантах выполнения вал 63 может быть образован двумя или большим количеством частей, расположенных в определенной последовательности по существу соосно друг с другом. Каждое рабочее колесо 65А, 65В с возможностью вращения установлено на валу 63.
Каждое рабочее колесо 65А, 65В содержит набор лопаток 67А, 67В, ограничивающих проточные каналы, проходящие от впускного отверстия рабочего колеса до выпускного отверстия рабочего колеса. Каждая ступень 61А, 61В может дополнительно содержать соответствующий возвратный канал 69А, 69В, который проходит от выпускного отверстия соответствующего рабочего колеса в направлении впускного отверстия последующего рабочего колеса. Возвратные каналы 69А, 69В могут быть выполнены в неподвижном направляющем аппарате 71, расположенном в корпусе 3 турбомашины 1.
Каждое рабочее колесо 65А, 65В может с возможностью вращения поддерживаться на неподвижном валу 63 посредством соответствующих подшипниковых узлов 68А, 70А и 68В, 70В, имеющих радиальную и осевую допустимые нагрузки. Подшипники могут смазываться и охлаждаться посредством жидкой составляющей технологической текучей среды, протекающей через турбомашину. В других вариантах выполнения изобретения подшипники могут представлять собой подшипники качения, имеющие уплотнительные устройства, предотвращающие протечку технологической текучей среды внутрь подшипников, как описано, например, со ссылкой на Фиг. 5 и 6.
В некоторых вариантах выполнения каждая ступень 61А, 61В секции 1В машины может иметь соответствующий встроенный электродвигатель, расположенный в корпусе 3. Каждый встроенный электродвигатель может представлять собой электродвигатель с постоянными магнитами или электродвигатель с переменным магнитным сопротивлением. В варианте выполнения, показанном на Фиг. 11, встроенный электродвигатель представляет собой электродвигатель с постоянными магнитами.
В некоторых вариантах выполнения каждый электродвигатель может содержать ротор, поддерживаемый соответствующим рабочим колесом 65А, 65В или сформированный в нем, и который взаимодействует со статором электродвигателя. В варианте выполнения, показанном на Фиг. 11, каждый электродвигатель содержит ротор, состоящий из постоянных магнитов 71А, 73А и 71В, 73В, расположенных вдоль двух кольцеобразных областей соответствующего рабочего колеса 61А, 61В. В других вариантах выполнения может быть предусмотрен одинарный набор кольцеобразно расположенных постоянных магнитов. Предпочтительно, постоянные магниты расположены вблизи выпускного отверстия соответствующего рабочего колеса, т.е. на задних кромках лопаток 67А, 67В рабочего колеса.
Каждый статор электродвигателя может содержать несколько электромагнитов, установленных неподвижно в корпусе машины, например, поддерживаемых или интегрированных в направляющий аппарат 71 и взаимодействующих с постоянными магнитами 71А, 73А, 71В, 73В. Электромагниты расположены таким образом, чтобы быть обращенными к соответствующему набору кольцеобразно расположенных постоянных магнитов 71А, 73А, 71В, 73В. В варианте выполнения, показанном на Фиг. 11, каждый статор электродвигателя содержит два набора кольцеобразно расположенных электромагнитов, обозначенных 75А, 77А и 75В, 77В, для двух ступеней, соответственно, 61А, 61В. Каждый набор электромагнитов взаимодействует с одним набором соответствующих постоянных магнитов 71А, 73А и 71В, 73В.
Аналогично статорам электродвигателя ступеней осевого типа, описанных выше, электромагниты статоров 75А, 77А, 75В, 77В электродвигателя могут содержать набор ферромагнитных магнитопроводов и выполненных вокруг них соответствующих проводящих обмоток.
Как уже упоминалось ранее, подшипники турбомашины могут смазываться и охлаждаться посредством жидкой составляющей той же самой текучей среды, которая пропускается через турбомашину 1. В целом, текучая среда представляет собой многофазную текучую среду, например, смесь газообразных и жидких углеводородов. Газообразная фракция текучей среды может быть использована для уменьшения трения в зазоре между статором и ротором встроенных электродвигателей ступеней машины.
Поскольку процент объемной доли газа (в данном описании также обозначенный как ОДГ%) может изменяться во время работы машины, могут возникать ситуации, когда процентное содержание жидкости недостаточно, чтобы обеспечить надлежащую смазку и/или охлаждение подшипниковых узлов, поддерживающих роторы встроенных электродвигателей. С другой стороны, имеются рабочие условия, которые могут увлечь жидкость с очень высокой вязкостью в зазор между статором и ротором электродвигателем, увеличивая, тем самым, потери на трение.
В соответствии с некоторыми вариантам выполнения, для оптимизации количества газа и/или жидкости для оптимального уменьшения трения в зазоре электродвигателя или для смазки и охлаждения подшипников, в выпускном отверстии турбомашины 1 может быть расположен газо-жидкостный сепаратор, в целях рециркуляции части газообразной фракции многофазной текучей среды, например, когда ОДГ% пропускаемой текучей среды имеет особенно низкое значение, и/или для рециркуляции части жидкой фракции, когда ОДГ% имеет особенно высокое значение.
В одном иллюстративном варианте выполнения изобретения, как показано на Фиг. 12, все также со ссылкой на Фиг. 1-11, турбомашина 1 имеет жидкостно-газовый сепаратор 81, расположенный ниже по потоку от выпускного коллектора 7 турбомашины 1. Жидкостно-газовый сепаратор 81 выполнен с возможностью отделения по меньшей мере части газообразной фракции и/или части жидкой фракции от основного потока, подаваемого через канал 80 подачи с помощью турбомашины 1. Основной поток выходит из сепаратора 81 через основной канал 83. Между жидкостно-газовым сепаратором 81 и турбомашиной 1 может быть расположен первый канал 85 для рециркуляции потока газа, находящийся в проточном сообщении со встроенными электродвигателями турбомашины. Распределительные проходы 87 для газа могут быть расположены и выполнены с возможностью распределения рециркулированного газа из канала 85 для рециркуляции потока газа в направлении зазоров между статором 33A, 33В электродвигателя и ротором 31А, 31В электродвигателя различных ступеней 13А, 13В турбомашины 1.
Рециркуляционный клапан 89 для газа может быть расположен вдоль канала 85 для рециркуляции потока газа, для управления рециркуляцией отработавших газов из жидкостно-газового сепаратора 81 в направлении турбомашины 1. Несколько клапанов, соединенных последовательно (не показаны), могут распределять поток при разных уровнях давления вдоль машины.
Для охлаждения потока рециркулированного газа вдоль канала 85 для рециркуляции потока газа может быть дополнительно предусмотрен теплообменник 91. Для управления рециркуляцией отработавших газов может быть использован рециркуляционный клапан 89 для газа или любое другое средство управления, так, что, если объемная доля газа в потоке текучей среды, пропускаемой через турбомашину 1, недостаточна для подходящего управления трением в зазоре электродвигателей, количество газа в зазорах может быть увеличено за счет рециркуляции газа.
В качестве альтернативы или в комбинации, между жидкостно-газовым сепаратором 81 и устройством 95 распределения жидкости может быть предусмотрен канал 93 для рециркуляции жидкости, предназначенный для рециркуляции по меньшей мере части жидкости из жидкостно-газового сепаратора 81 в направлении подшипников ступеней 13А, 13В машины, когда пропускаемая текучая среда имеет объемную долю жидкости (т.е. содержание жидкости), которая недостаточна для обеспечения надлежащей смазки и охлаждения подшипников. Для управления рециркулированным потоком жидкости может быть предусмотрен регулирующий клапан 97. Несколько клапанов, расположенных последовательно, могут распределять поток при разных уровнях давления вдоль машины. В некоторых вариантах выполнения вдоль канала 93 для рециркуляции жидкости для охлаждения жидкости до того, как она поступит к подшипникам, может быть также предусмотрен теплообменник 99.
В некоторых вариантах выполнения, как показано на Фиг. 13, все также со ссылкой на Фиг. 1-12, на турбомашину 1 может быть подано электропитание с помощью устройства 101 электроснабжения, которое может быть расположено снаружи корпуса 3 и находиться в электрической связи со встроенными электродвигателями ступеней 13А, 13В турбомашины 1.
В схематичном представлении, изображенном на Фиг. 13, устройство 101 электроснабжения может быть подключено к электрической распределительной сети G, например, трехфазной электрической распределительной сети. Устройство 101 электроснабжения может состоять из трансформатора, схематически показанного номером позиции 103, и выпрямителя, схематически показанного номером позиции 105. Электрические провода 107 могут входить в корпус 3 турбомашины 1 и быть подключены к каждому встроенному электродвигателю различных ступеней 13А, 13В. В схематичном представлении, изображенном на Фиг. 13, встроенные электродвигатели представлены лишь схематично и обозначены М1 … Mn для "n" ступеней турбомашины 1. Предпочтительно, каждый встроенный электродвигатель М1-Mn, который, в свою очередь, содержит ротор 31А, 31В и статор 33A, 33В, как описано выше в связи с Фиг. 1-11, может содержать цепь управления питанием, схематически обозначенную как 111.1 - 111.n на схеме Фиг. 13. Каждая цепь 111.1 - 111.n управления питанием может представлять собой цепь высокочастотного управления питанием, способную управлять скоростью вращения каждого встроенного электродвигателя М1-Mn по отдельности, в соответствии с подходящим алгоритмом управления.
На Фиг. 14 показан схематический вид в разрезе электродвигателя одной из ступеней 13А или 13В турбомашины. Как показано на Фиг. 14, все также со ссылкой на Фиг. 1-13, электродвигатель содержит статор 33, который может представлять собой любой из статоров 33A, 33В электродвигателя, и ротор 31, который может представлять собой любой из роторов 31А, 31В электродвигателя. Ротор электродвигателя содержит несколько постоянных магнитов 32, которые могут представлять собой любой из постоянных магнитов 32А, 32В, как это было описано выше. Статор 33 может состоять из нескольких модульных магнитопроводов 35, каждое из которых может представлять собой любой из магнитопроводов 35А, 35В, и состоит из ферромагнитных плеч или расширяющихся частей 36, обращенных к ротору 31 электродвигателя. Каждое плечо 36 окружено электрической обмоткой 37, соответствующей любой из обмоток 37А, 37В. Проводка 40 расположена вокруг статора для подачи питания к обмотке 37. Проводка 40 типичного «i»-го электродвигателя может быть подключена к соответствующей цепи 111.i управления питанием, как показано на Фиг. 13. В примере, показанном на Фиг. 14, проводка 40 имеет несколько проводов, каждый из которых представляет собой фазу системы электропитания. Обмотки 37 электрически соединены с фазами проводки 40 таким образом, что последовательно расположенные обмотки подключены к разным фазам, как известно специалистам в данной области техники, подавая, тем самым, электропитание к обмоткам последовательно и вызывая вращение ротора 31 электродвигателя, который следует за вращением магнитного поля, создаваемого обмотками.
В соответствии с другими вариантами выполнения, для каждого магнитопровода статора могут быть предусмотрены отдельные цепи управления, а не единый блок управления питанием, и многофазная проводка 40. Фиг. 15 иллюстрирует иллюстративный вариант выполнения, в котором каждый магнитопровод имеет свою собственную цепь управления питанием. На Фиг. 15 часть одного из электродвигателей ступеней 13А, 13В показана на вид в разрезе. Одни и те же номера позиций, что показаны на Фиг. 13 и 14, используются для обозначения одинаковых или соответствующих частей или элементов. На Фиг. 15 электропитание от выпрямителя 105 подается через электрические провода 107 к внутренней части статора 33 электродвигателя. Ротор электродвигателя на Фиг. 15 для простоты не показан. Статор 33 может состоять из нескольких модульных компонентов, каждый из которых состоит из магнитопровода 35 с электромагнитными плечами 36, проходящими в радиальном направлении ротора электродвигателя и имеющими расширяющиеся части 36Х. Обмотка 37 намотана вокруг каждого плеча 36. Каждая обмотка 37, которая может быть любой из обмоток 37А, 37В, электрически запитана от встроенной цепи 111 управления питанием. Каждая встроенная цепь 111 управления питанием подключена к проводам 107 и управляется таким образом, что на обмотки питание подается последовательно, генерируя крутящий момент на роторе 31 электродвигателя.
В обоих вариантах выполнения, показанных на Фиг. 14 и 15, показан охлаждающий канал 38, в котором охлаждающая среда, предпочтительно, охлаждающая жидкость, может циркулировать для отвода тепла от статора каждого встроенного электродвигателя.
Для того чтобы правильно синхронизировать расположенные по окружности обмотки 37 каждого статора электродвигателя, так, чтобы сформировать крутящий момент на соответствующем роторе электродвигателя, угловое положение соответствующего ротора должно быть известно. Оно может быть измерено с помощью датчика, такого как датчик Холла. В качестве альтернативы, для измерения углового положения ротора может быть использована одна или несколько обмоток 37. В этом случае можно обойтись без отдельного датчика. Дополнительные данные о том, как обмотки статора в электродвигателе с постоянными магнитами могут быть использованы для получения информации об угловом положении ротора электродвигателя для управления подачей питания к обмоткам статора, раскрыты, например, в европейском патенте №2369721 и в других публикациях этого семейства патентов-аналогов, содержание которых включено в настоящее описание в качестве ссылки. Упомянутые выше публикации также раскрывают модульную конструкцию статора и ротора электродвигателя, которая может быть с успехом использована при проектировании встроенных электродвигателей настоящего изобретения.
Как уже упоминалось выше, вместо электродвигателей с постоянными магнитами, встроенные электродвигатели могут представлять собой электродвигатели с переменным магнитным сопротивлением, или же коммутируемые или синхронные реактивные электродвигатели. Схематическое представление ступени турбомашины с электродвигателем с переменным магнитным сопротивлением такого типа показано на Фиг. 16 на виде спереди. Электродвигатель с переменным магнитным сопротивлением раскрыт, например, в итальянской заявке на патент №ТО2013А000952, поданной 22 ноября 2013 года на имя GE Avio S.r.I. В иллюстративном варианте выполнения, показанном на Фиг. 16, электродвигатель имеет наружный статор и внутренний ротор. В других вариантах выполнения может быть использована обратная конструкция, в которой ротор электродвигателя и лопатки окружают статор электродвигателя, даже если эта конструкция может быть менее эффективной и, в некоторой степени, даже более сложной.
На Фиг. 16 ступень турбомашины в целом обозначена номером позиции 13 и может представлять собой любую из ступеней 13А или 13В турбомашины 1. Ротор электродвигателя обозначен номером позиции 31. Статор электродвигателя обозначен номером позиции 33 и может быть по существу таким же, что и статоры 33A, 33В, описанные выше со ссылками на Фиг. 1-15.
Статор может состоять из нескольких кольцеобразно расположенных ферромагнитных магнитопроводов или сердечников 35. Каждый магнитопровод может состоять из двух ферромагнитных расширяющихся частей или плеча 36, ориентированных в радиальном направлении к оси А-А электродвигателя и обращенных к ротору 31 электродвигателя. Аналогично описанным выше примерам, магнитопроводы могут иметь слоистую структуру, то есть они могут быть выполнены из нескольких пакетированных листов ферромагнитного материала, электрически изолированных друг от друга, для ограничения вихревых токов в ферромагнитных сердечниках, как это хорошо известно в области техники. Электрическая обмотка 37 намотана на каждой радиально ориентированной расширяющейся части или плече 36 магнитопровода.
В соответствии с некоторыми вариантами выполнения, ротор 31 электродвигателя выполнен из нескольких кольцеобразно расположенных модульных компонентов 30, каждый из которых может состоять из ферромагнитных частей, взаимодействующих с электромагнитами, образованными обмотками и магнитопроводами статора 33 электродвигателя, и барьеров магнитного потока, которые отделяют ферромагнитные части друг от друга. Конструкции ферромагнитных частей и расположенных между ними барьеров магнитного потока в электродвигателях с переменным магнитным сопротивлением или в коммутируемых реактивных электродвигателях известны в данной области техники. Примеры таких конструкций раскрыты, например, в патенте США №7489062 и в международной патентной публикации №2011/154045, содержание которых включено в настоящий документ в качестве ссылки.
Для изоляции модульных компонентов ротора 31 электродвигателя от рабочего колеса может быть предусмотрено уплотнительное средство 34, которое схематически показано на Фиг. 15. В магнитопроводе статора 33 электродвигателя могут быть предусмотрены охлаждающие каналы 38.
Еще один вариант выполнения турбомашины, выполненной в соответствии с настоящим изобретением, показан в осевом разрезе на Фиг. 17. Одинаковые номера позиций обозначают соответствующие части или элементы, как показано в вариантах выполнения, описанных выше. Эти части или элементы не будут описаны снова. Турбомашина 1, изображенная на Фиг. 17, содержит корпус 3 со вспомогательным отделением 3D, которое может быть выполнено, например, в части 3C корпуса 3. Отделение 3D может вмещать электронную систему управления, обозначенную в целом номером позиции 114, предназначенную для управления и питания встроенных электродвигателей ступеней 13А, 13В турбомашины 1. Один или несколько кабель-каналов 116 могут быть предусмотрены для проводки, соединяющей встроенные электродвигатели и систему 114 управления. Остальная конструкция турбомашины 1 и, в частности, расположение статоров, роторов и лопаток рабочего колеса, а также расположение внутреннего неподвижного вала и подшипников может быть такой же, как описано выше в связи с другими вариантами выполнения, показанными на Фиг. 1-16.
Фиг. 18 иллюстрирует еще один вариант выполнения турбомашины, выполненной в соответствии с настоящим изобретением, на виде в осевом разрезе. Одни и те же или соответствующие компоненты, части или элементы, уже описанные в связи с предыдущими примерами, обозначены одним и теми же номерами позиций и не будут описаны снова. В варианте выполнения, изображенном на Фиг. 18, впускной коллектор 5 и выпускной коллектор 7 корпуса 3 являются соосными, т.е. они совмещены вдоль оси А-А вращения рабочих колес 15А, 15В турбомашины. Концы центрального неподвижного вала 27 могут быть установлены на двух расположенных в осевом направлении концевых опорах 62, которые могут быть присоединены к частям 3B, 3C корпуса, например, с помощью радиальных перегородок 64, ограничивающих впускной и выпускной проходы для текучей среды, пропускаемой через турбомашину.
В некоторых вариантах выполнения встроенные электродвигатели и, в частности, статоры электродвигателя, должны охлаждаться, например, путем циркуляции охлаждающей среды, такой как жидкость или газ, через соответствующим образом расположенные охлаждающие каналы, такие как каналы 38, показанные в поперечном разрезе на Фиг. 14, 15 и 16. Также со ссылкой на Фиг. 2-18, на Фиг. 19 показана часть турбомашины, выполненной в соответствии с настоящим изобретением, в разрезе по продольной оси, то есть в плоскости, проходящей через ось А-А вращения турбомашины, изображая продольное продолжение охлаждающего канала 38, в соответствии с иллюстративным вариантом выполнения. Канал 38 может быть образован продольно проходящими трубами 38А. В некоторых вариантах выполнения каждая труба может быть образована с помощью нескольких отдельных секций, каждая из которых проходит в продольном направлении поперек соответствующего статора 33A, 33В электродвигателя одной из ступеней 13А, 13В турбомашины. Трубы 38А могут проходить через магнитопроводы 35А, 35В статоров 33A, 33В электродвигателя. В некоторых вариантах выполнения, как показано на Фиг. 19, каждый статор 33A, 33В электродвигателя может быть расположен в корпусе 42, окруженном оболочкой или кожухом 44. Секции труб каждого статора электродвигателя проходят через соответствующий корпус 42 и оканчиваются на наружной поверхности оболочки или кожуха 44 так, что непрерывная проходящая в продольном направлении система охлаждения получается присоединением оболочки или кожуха 44, как показано на Фиг. 19.
В некоторых вариантах выполнения, как показано на Фиг. 20, все также со ссылкой на Фиг. 1-19, рабочие колеса турбомашины могут поддерживаться активными магнитными подшипниками, вместо подшипников качения или подшипников скольжения, или в комбинации с ними. На Фиг. 20, который иллюстрирует вид в поперечном разрезе иллюстративного варианта выполнения устройства с использованием магнитных подшипников, одни и те же номера позиций, указанные на предыдущих чертежах, используются для одних и тех же или эквивалентных компонентов, которые снова не описаны. На чертеже типичное рабочее колесо 15, которое может представлять собой одно из рабочих колес 15А, 15В, показано с лопатками 17. Рабочее колесо 15 представляет собой единое целое с соответствующим ротором 31 и поддерживается активным магнитным подшипником 55М. Активный магнитный подшипник 55М может состоять из внутренних электромагнитов 55Е, неподвижно поддерживаемых валом 27, и наружных постоянных магнитов 58М, вращающихся как одно целое с рабочим колесом 15.
В вышеописанных вариантах выполнения скоростью вращения рабочих колес осевого типа управляют таким образом, что два последовательно расположенных рабочих колеса вращаются в противоположных направлениях, а между рабочими колесами не расположены никакие неподвижные лопатки или лопасти. Это уменьшает общий осевой размер турбомашины. Большое число рабочих колес, таким образом, может быть расположено в относительно небольшом корпусе, уменьшая пространство, занимаемое машиной. В некоторых вариантах выполнения, тем не менее, может быть предусмотрена одна или несколько кольцеобразных конструкций неподвижных лопаток, расположенных между двумя последовательно расположенными рабочими колесами. В этом случае указанные два рабочих колеса расположены непосредственно рядом с неподвижными лопатками, то есть рабочие колеса, расположенные выше и ниже по потоку от неподвижных лопаток, вращаются в одном направлении. Может быть предусмотрена одна или несколько кольцеобразных конструкций неподвижных лопаток, например, если требуется радиальная опора для вала 27. Промежуточная радиальная опора для вала соединена с корпусом машины через неподвижные лопатки, которые образуют неподвижные направляющие лопатки для прохода текучей среды. Промежуточная радиальная опора может быть полезной, например, в случае относительно длинных и/или относительно тонких валов.
Описанные выше варианты выполнения многоступенчатой турбомашины со встроенными электродвигателями обеспечивают возможность независимого управления частотой вращения каждой ступени рабочего колеса для оптимальной работы турбомашины при работе с многофазным потоком текучей среды, в особенности, когда турбомашина работает с переменными процентами объемной доли газа (ОДГ%) или процентами объемной доли жидкости (ОДЖ%), то есть далеко от расчетных значений ОДГ% или ОДЖ%.
В соответствии с некоторыми вариантами выполнения, в широком смысле, скоростями вращения последовательно расположенных ступеней турбомашины можно управлять таким образом, что скорость вращения ступеней снижается от самой верхней по потоку до самой нижней по потоку ступени турбомашины, когда ОДГ% больше нуля. При этом учитывается, что объемная скорость потока уменьшается при увеличении давления технологической текучей среды, за счет сжатия газообразной фракции, содержащейся в пропускаемой текучей среде. Уменьшение скорости вращения последовательно расположенных ступеней поддерживает углы скорости по существу постоянными, увеличивая до максимума, тем самым, коэффициент полезного действия каждой ступени и, таким образом, всей турбомашины в целом.
В случае изменения ОДГ% во время работы турбомашины, в связи с изменением содержания газа во входящем потоке текучей среды, общий коэффициент сжатия текучей среды изменяется. Более конкретно, общий коэффициент сжатия входящего потока возрастает с увеличением ОДГ%. Таким образом, разница в скоростях между последовательно расположенными ступенями должна быть адаптирована к изменяющемуся коэффициенту сжатия входящего потока текучей среды.
Как правило, чем выше ОДГ% поступающего потока текучей среды, тем больше разность в скоростях между первой и последней ступенями турбомашины, так как большее количество газа в поступающей текучей среде увеличивает коэффициент сжатия текучей среды и, тем самым, изменение объемного расхода в ступенях. Использование независимых встроенных электродвигателей обеспечивает возможность адаптации работы машины с переменной ОДГ% и, тем самым, увеличения до максимума коэффициента полезного действия турбомашины даже тогда, когда турбомашина работает далеко от расчетных значений ОДГ%.
На Фиг. 21 показана схематическая диаграмма, иллюстрирующая, как теоретически можно управлять скоростью вращения последовательно расположенных ступеней, отслеживая изменения процентного содержания объемной доли газа ОДГ% на входе турбомашины. Номер ступени отложен по горизонтальной оси, где 1 является самой верхней по потоку ступенью, а N является самой нижней по потоку ступенью, относительно направления потока через турбомашину. Скорость вращения (в оборотах в минуту) отложена по вертикальной оси. Каждая кривая Ci (i=0 … n) на Фиг. 21 представляет собой изменение скорости через последовательно расположенные ступени турбомашины. Различные кривые соответствуют разным ОДГ% на входе турбомашины. ОДГ% увеличивается от одной кривой Ci к следующей, в соответствии со стрелкой, показанной на Фиг. 21.
Схематическая диаграмма на Фиг. 21 конкретно относится к турбомашине, предназначенной для пропускания потока жидкости, то есть с ОДГ%=0 на входе. Так как жидкость является по существу несжимаемой, объемный расход остается постоянным по всей турбомашине и, следовательно, расположенные последовательно ступени аналогичны или идентичны друг другу, по меньшей мере в отношении площади поперечного сечения потока. Так обстоит дело, например, в иллюстративных турбомашинах, показанных на Фиг. 1-19. При расчетных условиях различные ступени вращаются с одинаковой скоростью вращения. Таким образом, на Фиг. 21 работа при расчетных условиях представлена кривой С0, которая параллельна горизонтальной оси (одинаковое число оборотов в минуту для всех ступеней).
Если во входном потоке содержится газ, то есть, если ОДГ% на входе машины увеличивается от нуля до положительного значения, то турбомашина больше не будет работать при расчетных условиях. Так как текучая среда становится сжимаемой и ее коэффициент сжатия возрастает с увеличением ОДГ%, то работа турбомашины изменяется за счет изменения скорости вращения различных ступеней. Грубо говоря, условия работы турбомашины с увеличением ОДГ% переходят от кривой С0 к кривой Cn. Скорость вращения первой ступени турбомашины увеличивается, чтобы учесть, что, если газ присутствует во входном потоке, то средняя плотность текучей среды не остается постоянной, а возрастает при переходе от первой к последней ступени машины, с повышением давления. По мере того, как объемный расход уменьшается при переходе от одной ступени к другой и, как следствие, увеличивается плотность, скорость последующих последовательных ступеней вдоль машины постепенно уменьшается, как это показано на Фиг. 21.
Чем больше объемный процент газовой фракции во входном потоке, тем выше скорость вращения первой ступени в турбомашине, что можно видеть при сравнении кривых С1-Cn на Фиг. 21. Кроме того, большее количество газа в потоке требует большего изменения скорости вращения от одной ступени к другой, то есть получаем кривую с более крутой зависимостью скорости от номера ступени.
В более общих чертах, турбомашина может быть предназначена для пропускания смешанного потока, т.е. потока текучей среды с отличной от нуля ОДГ%. В этом случае, когда машина работает в расчетном режиме с установленной ОДГ%, скорости вращения различных ступеней будут идентичны. Если объем газа во входном потоке уменьшается (т.е. если ОДГ% становится ниже, чем расчетное значение, то первая ступень будет замедляться, а скоростью промежуточных ступеней управляют, чтобы скорость постепенно увеличивалась от минимальной скорости вращения первой ступени до скорости последней ступени. Если количество газа относительно расчетного значения увеличивается, то есть если ОДГ% входного потока увеличивается, то скорость вращения первой ступени будет возрастать, а скорость последующих промежуточных ступеней будет соответствующим образом подстраиваться, то есть будет постепенно падать до достижения скорости вращения последней ступени.
Эта общая ситуация обобщена на Фиг. 22. Кривая С0 снова представляет собой распределение скоростей вращения в различных ступенях, когда турбомашина работает при расчетных условиях: каждая ступень вращается с одной и той же скоростью вращения. Кривые С1 и С2 представляют собой условия, при которых ОДГ% на входе машины ниже, чем расчетное ОДГ%. Кривые С3, С4 и С5 представляют рабочие условия с увеличенным содержанием газа во входном потоке, т.е. с ОДГ% выше расчетного ОДГ%, и увеличивающимся от кривой С3 к кривой С5.
В соответствии с некоторыми вариантами выполнения, скорости вращения ступеней турбомашины могут быть подстроены под ОДГ% на входе машины, измеряя или рассчитывая ОДГ% входного потока со смешанной фазой.
Управление встроенными электродвигателями может быть основано на способности установки вращательного момента электродвигателя или скорости электродвигателя для каждой ступени. В соответствии с некоторыми вариантами выполнения, управление скоростью осуществляется путем установки коэффициента усиления по скорости для каждой ступени. Коэффициент усиления ступени может быть получен путем установки фиксированного усиления и умножения фиксированного усиления на параметр, который отличается для каждой ступени. Различные параметры могут быть определены на основании измерений коэффициента сжатия текучей среды на входе турбомашины.
Ниже описаны примеры алгоритмов управления скоростью вращения ступени.
Пример А
В соответствии с некоторыми вариантами выполнения, скоростью вращения различных ступеней машины можно управлять, начиная с измерения следующих параметров: давления Р1 на стороне пониженного давления; давления Р2 на стороне повышенного давления, температуры Т1 на стороне пониженного давления, температуры T2 на стороне повышенного давления, общей массовой скорости m потока, мощности Wi, потребляемой каждым электродвигателем; плотности жидкости и газа на стороне пониженного давления.
Полная работа, передаваемая жидкости, задана формулой

где Wtot представляет собой полную мощность, передаваемую с помощью электродвигателей, а η представляет собой коэффициент полезного действия, который может быть сохранен, например, в виде таблицы в запоминающем устройстве, доступном с помощью блока управления турбомашины, и который может быть извлечен, основываясь на измеренных рабочих параметрах.
Полная работа Litot, передаваемая текучей среде, также задана суммой работы, передаваемой, соответственно, в жидкую фракцию и газовую фракцию текучей среды, которая выражается следующим образом:

где х представляет собой массовую долю газа пропускаемой текучей среды, ρL представляет собой плотность жидкой фракции в пропускаемой текучей среде, ρ1gas представляет собой плотность газа на входе турбомашины (на стороне пониженного давления); и
где n представляет собой политропную экспоненту.
Используя температуру Т1 на стороне пониженного давления и температуру Т2 на стороне повышенного давления, могут быть записаны дополнительные уравнения, которые учитывают удельную теплоемкость многофазной текучей среды следующим образом:


где Cpmix представляет собой удельную теплоемкость многофазной смеси;
zR представляет собой коэффициент упругости газа на стороне пониженного давления.
Решая систему уравнений (1)-(4), может быть определена массовая доля х газа и политропный показатель n. На основе х и Р1 может быть установлено оптимальное распределение повышения давления в каждой ступени между Р1 и Р2 и сохранено в виде таблицы. Предполагая, что n и х являются постоянными для всех ступеней, применяя уравнение (2) к одной ступени, работа, обеспечиваемая каждой ступенью, может быть рассчитана следующим образом:

Наконец, используем уравнение (1) для расчета установочной мощности для каждой ступени:
В соответствии с некоторыми вариантами выполнения, установочная мощность может быть использована различными способами для управления турбомашиной. В соответствии с одним вариантом выполнения, крутящий момент, прикладываемый каждым электродвигателем, может быть обнаружен, например, основываясь на измерении электрического тока, потребляемого электродвигателем. На основании измеренного крутящего момента и расчетном установочном значении мощности (Wi) определяют установочную скорость вращения (ωi) соответствующего i-го рабочего колеса. В других вариантах выполнения, если определена скорость вращения (ωi) рабочего колеса i-ой ступени, то установочный крутящий момент вычисляют на основании измеренного значения скорости вращения и расчетной мощности (Wi) в установочной точке.
Для того, чтобы устранить или снизить ошибки, вытекающие из принятой модели и из измерений параметров, участвующих в расчетах, скорректированную скорость вращения каждой ступени (ωj-corr) можно рассчитать, исходя из скорости вращения указанной ступени, рассчитанной как описано выше, умноженной на коэффициент между скоростью вращения  полученной с помощью замкнутой системы управления при разности давлений (Р2-Р1), и средним значением скорости вращения ступеней, полученным, как описано выше. Скорректированная скорость вращения для j-ой ступени будет равна:
полученной с помощью замкнутой системы управления при разности давлений (Р2-Р1), и средним значением скорости вращения ступеней, полученным, как описано выше. Скорректированная скорость вращения для j-ой ступени будет равна:
Пример В
Чтобы упростить алгоритм управления и избежать необходимости вычисления объемной доли газа, вместо того, чтобы по-отдельности рассчитывать скорость вращения для каждой ступени, в соответствии со вторым подходом для установки скорости вращения (ωi) каждой i-ой ступени может быть введен и использован коэффициент ks следующим образом:
где  представляет собой среднюю скорость вращения.
представляет собой среднюю скорость вращения.
Параметр ks вычисляют эмпирически на основе параметров, которые могут быть измерены, таких как Т2/T1; Р2/Р1; скорость потока, среднее число оборотов в минуту. При таком подходе управление при средней скорости вращения представляет собой управление с замкнутой обратной связью, тогда как управление на скорости вращения каждой ступени представляет собой управления с открытой обратной связью.
Пример С
В соответствии с третьим иллюстративным вариантом выполнения, обеспечивается первый контур управления, который управляет скоростью вращения каждой ступени, в зависимости от разницы давлений в турбомашине, для того, чтобы поддерживать указанную разницу давлений при установочном значения или около этого значения при изменении ОДГ. Также может быть предусмотрен второй, более медленный контур управления, который отслеживает минимальное поглощение энергии.
Более подробно, полагая, что ΔPset представляет собой установленное значение разности давлений, а ΔР представляет собой измеренную разность давлений между сторонами повышенного давления и пониженного давления турбомашины, изменение средней скорости вращения  рассчитывается следующим образом:
рассчитывается следующим образом:

Установочная средняя скорость вращения затем рассчитывается как:
где ωi представляет собой скорость вращения i-ой ступени, а N представляет собой общее число ступеней в турбомашине. Установочное значение скорости вращения (ωi-set) каждой i-ой ступени затем вычисляют в зависимости от установленного значения средней скорости вращения, принимая во внимание, что скорость вращения каждой ступени отличается от скорости вращения соседней(их) ступени(ей). Например, линейное распределение скорости вращения может быть рассчитано следующим образом:

где ks представляет собой коэффициент коррекции. Вместо этого могут быть вычислены более сложные, нелинейные распределения скорости вращения.
При необходимости, значение ωi-set можно скорректировать следующим образом:

чтобы принять во внимание изменения ОДГ, происходящие во время выполнения алгоритма управления.
Коэффициентом ks, используемым для вычисления скорости вращения каждого встроенного электродвигателя каждой ступени, можно управлять с помощью второго контура управления на медленной скорости, который вычисляет оптимальное значение ks, которое понижает до минимума общую мощность (W), потребляемую встроенными электродвигателями. Оптимизированный контур управления может включать этап пертурбации ks, и наблюдения, вызывает ли указанная пертурбация увеличение или уменьшение общей мощности, потребляемой электродвигателями. Алгоритм может быть следующим:


где W(t) представляет собой мгновенную полную мощность, потребляемую в момент времени (t) встроенными электродвигателями. Значение ks, таким образом, изменяется для поддержания полной мощности на минимальном уровне, путем выбора оптимального распределения скоростей вращения для последовательно расположенных ступеней.
В описанном выше варианте выполнения используется один поправочный коэффициент ks, при этом распределение скорости вращения является линейным. Могут быть предусмотрены более сложные алгоритмы, с использованием более чем одного поправочного коэффициента и нелинейного распределения скорости вращения.
Пример D
В соответствии с четвертым иллюстративным вариантом выполнения, алгоритм управления основан на идее увеличения до максимума использования мощности за счет работы различных ступеней при постоянном коэффициенте нагрузки.
Турбомашиной управляют таким образом, чтобы поддерживать разность установленных давлений между стороной пониженного давления и стороной повышенного давления. Полагая, что ΔPset представляет собой установленное значение разности давлений, а ΔР представляет собой измеренную разность давлений между сторонами повышенного давления и пониженного давления, обеспечивается первый контур управления, который рассчитывает вариацию  средней скорости
средней скорости  вращения, которая необходима для повторного смещения рабочих условий турбомашины к установленному значению разности давлений. Вариация
вращения, которая необходима для повторного смещения рабочих условий турбомашины к установленному значению разности давлений. Вариация  средней скорости вращения рассчитывается следующим образом:
средней скорости вращения рассчитывается следующим образом:

откуда среднее установленное значение средней скорости вращения затем рассчитывается как:
где ωi представляет собой скорость вращения i-ой ступени, а N представляет собой общее число ступеней в турбомашине. Вариация скорости вращения каждой i-ой ступени затем вычисляют путем вычисления установленного крутящего момента (Cset), причем каждым встроенным электродвигателем управляют таким образом, чтобы обеспечить один и тот же крутящий момент и, таким образом, обеспечить одинаковое изменение кинетического момента протекающего потока. Установленное значение крутящего момента вычисляют следующим образом:

где Wi представляет собой мощность, потребляемую электродвигателем i-ой ступени. То есть, установленное значение крутящего момента Cset становится равным среднему крутящему моменту. Вариация Δωi скорости вращения для каждой i-ой ступени затем вычисляют следующим образом:
где Ci представляет собой крутящий момент i-ой ступени. Поправка крутящего момента для каждой ступени рассчитывают следующим образом:
Могут быть разработаны другие алгоритмы управления, на основе, например, комбинаций или модификаций указанных выше иллюстративных алгоритмов.
В целом, с помощью встроенных электродвигателей с системой управления, способной управлять скоростью различных электродвигателей независимо друг от друга, может быть использован способ управления, который модифицирует по меньшей мере один рабочий параметр электродвигателей, для того, чтобы принять во внимание изменение коэффициента сжатия технологической текучей среды, например, из-за изменения ОДГ% или ОДЖ%. В общих чертах, турбомашиной можно управлять таким образом, что для компенсации изменения коэффициента сжатия может быть модифицирован один или несколько из следующих рабочих параметров встроенных электродвигателей: скорость вращения, крутящий момент, потребляемая мощность или их комбинация.
Несмотря на то, что раскрытые варианты выполнения изобретения, описанные выше, были показаны на чертежах и подробно описаны выше со спецификой и детализацией, в связи с несколькими иллюстративными вариантами выполнения, специалистам в этой области техники будет очевидно, что возможны многочисленные модификации, изменения и опущения, без существенного отхода от идей, принципов и концепций изобретения, которые изложены в настоящем документе, и преимуществ изобретения, завяленного в прилагаемой формуле изобретения.
Следовательно, надлежащий объем раскрытого изобретения определяется только самой широкой интерпретацией прилагаемой формулы изобретения таким образом, чтобы охватывать все такие модификации, изменения и опущения. Кроме того, порядок или последовательность любых этапов процесса или способа может быть изменена или повторена, в соответствии с альтернативными вариантами выполнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПРЕССОР СО ВСТРОЕННЫМИ ДВИГАТЕЛЯМИ И РАБОЧИМИ КОЛЕСАМИ, ОБЪЕДИНЕННЫМИ С РОТОРАМИ ДВИГАТЕЛЕЙ | 2014 |
|
RU2669122C1 |
| ТЕРМОДИНАМИЧЕСКАЯ СИСТЕМА КОМБИНИРОВАННОГО ЦИКЛА ДЛЯ ВЫРАБОТКИ МЕХАНИЧЕСКОЙ ЭНЕРГИИ И СПОСОБ ВЫРАБОТКИ МЕХАНИЧЕСКОЙ ЭНЕРГИИ И ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ТУРБОМАШИНЫ | 2013 |
|
RU2644801C2 |
| УСТАНОВКА С ТУРБОДЕТАНДЕРОМ И ПРИВОДНОЙ ТУРБОМАШИНОЙ | 2013 |
|
RU2643281C2 |
| НАСОС С СИСТЕМОЙ СМАЗКИ ПОДШИПНИКА | 2020 |
|
RU2783175C1 |
| ОПРЕДЕЛЕНИЕ ФАЗОВОГО СОСТАВА ПОТОКА ТЕКУЧЕЙ СРЕДЫ | 2015 |
|
RU2724429C2 |
| Электрическая машина с вентиляторным охлаждением и с компенсацией осевой нагрузки | 2014 |
|
RU2653862C2 |
| ИНТЕГРИРОВАННАЯ КОМПРЕССИОННАЯ УСТАНОВКА ВЫСОКОГО ДАВЛЕНИЯ ДЛЯ РАБОЧЕЙ ТЕКУЧЕЙ СРЕДЫ И СПОСОБ СЖАТИЯ РАБОЧЕЙ ТЕКУЧЕЙ СРЕДЫ | 2010 |
|
RU2542657C2 |
| КОНТРОЛЛЕР ДЛЯ СМАЧИВАЮЩЕЙ СИСТЕМЫ УПЛОТНЯЮЩЕГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2300602C2 |
| МНОГОСТУПЕНЧАТАЯ ЦЕНТРОБЕЖНАЯ ТУРБОМАШИНА | 2012 |
|
RU2600482C2 |
| Турбогенератор | 2023 |
|
RU2821119C1 |
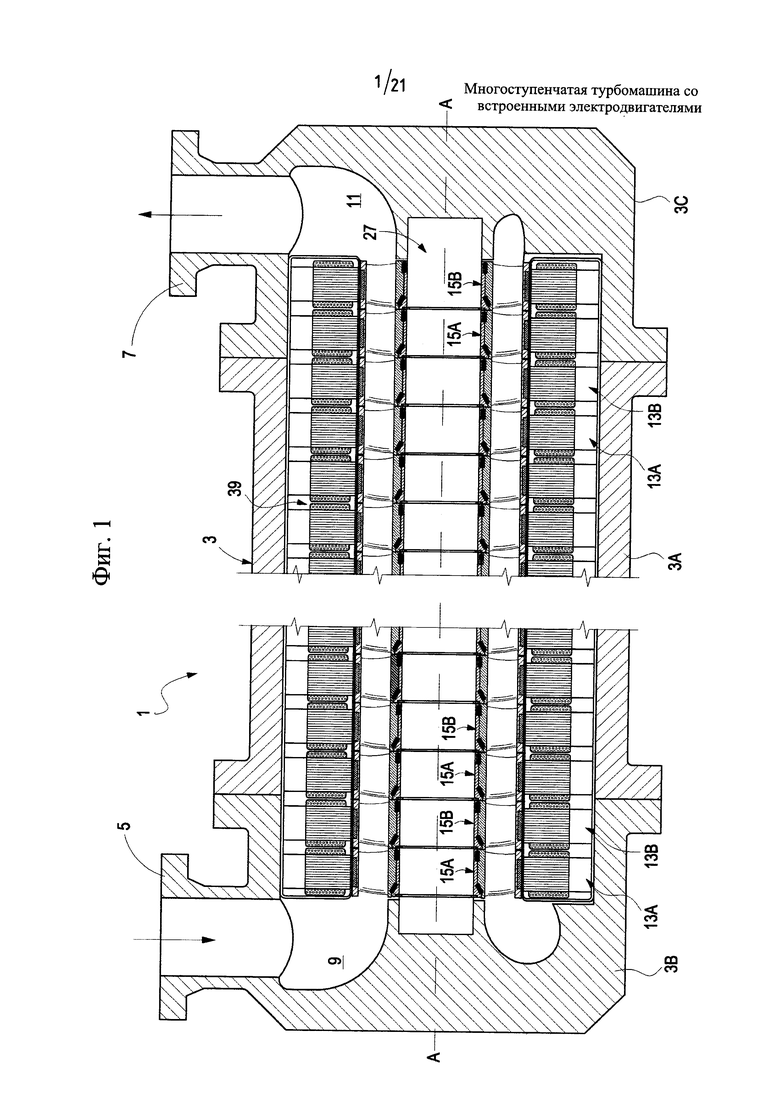
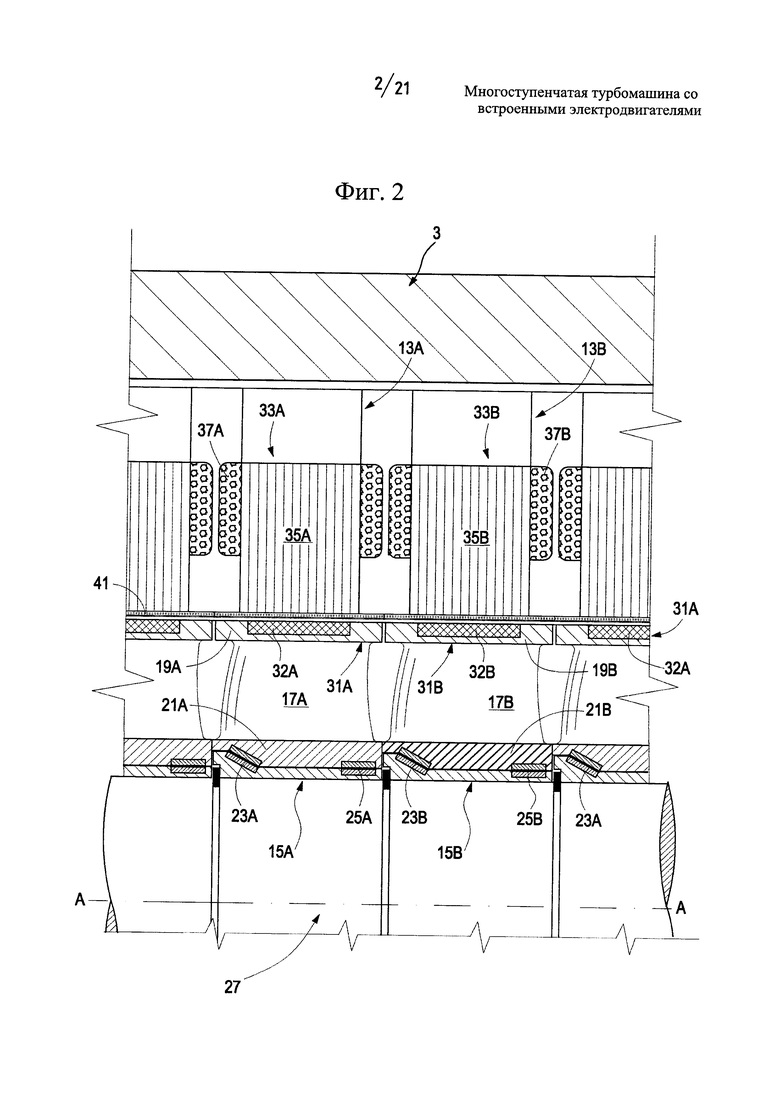
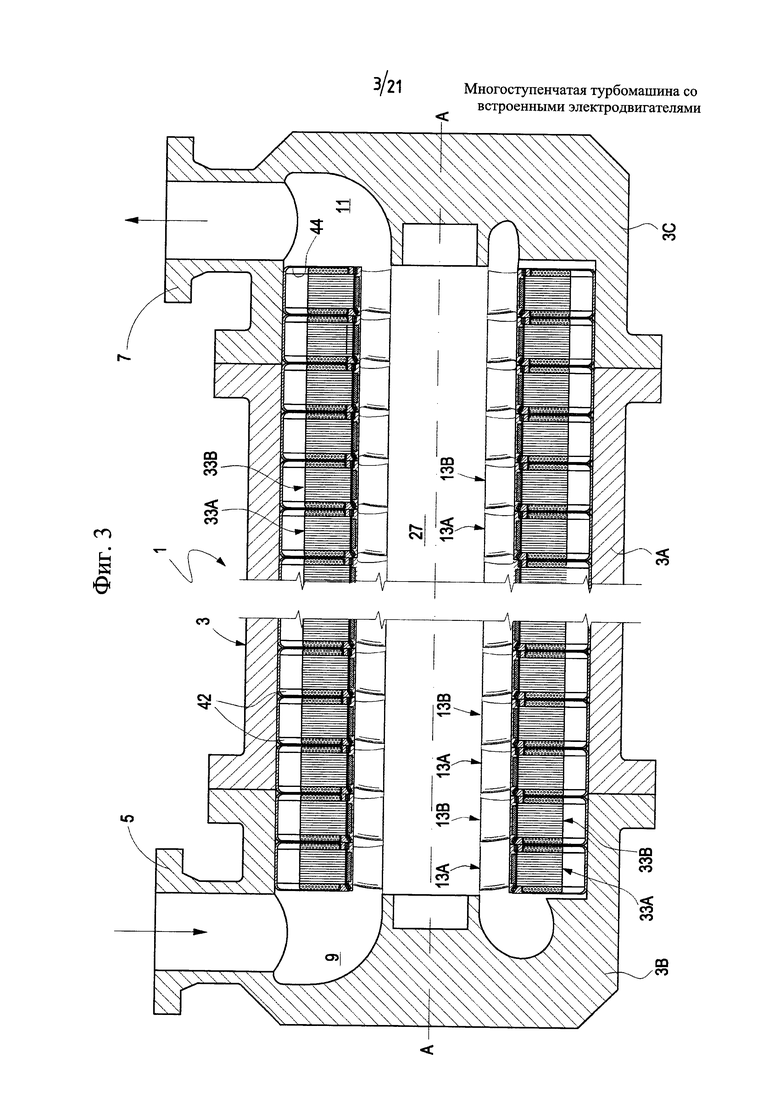
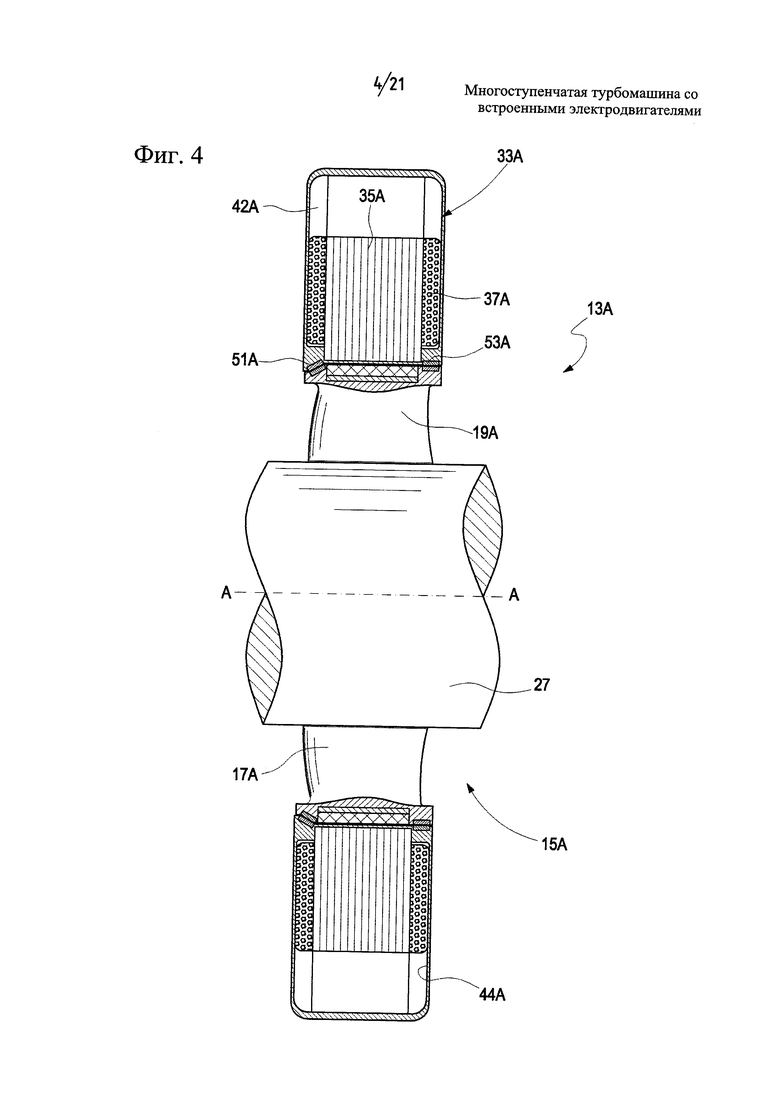
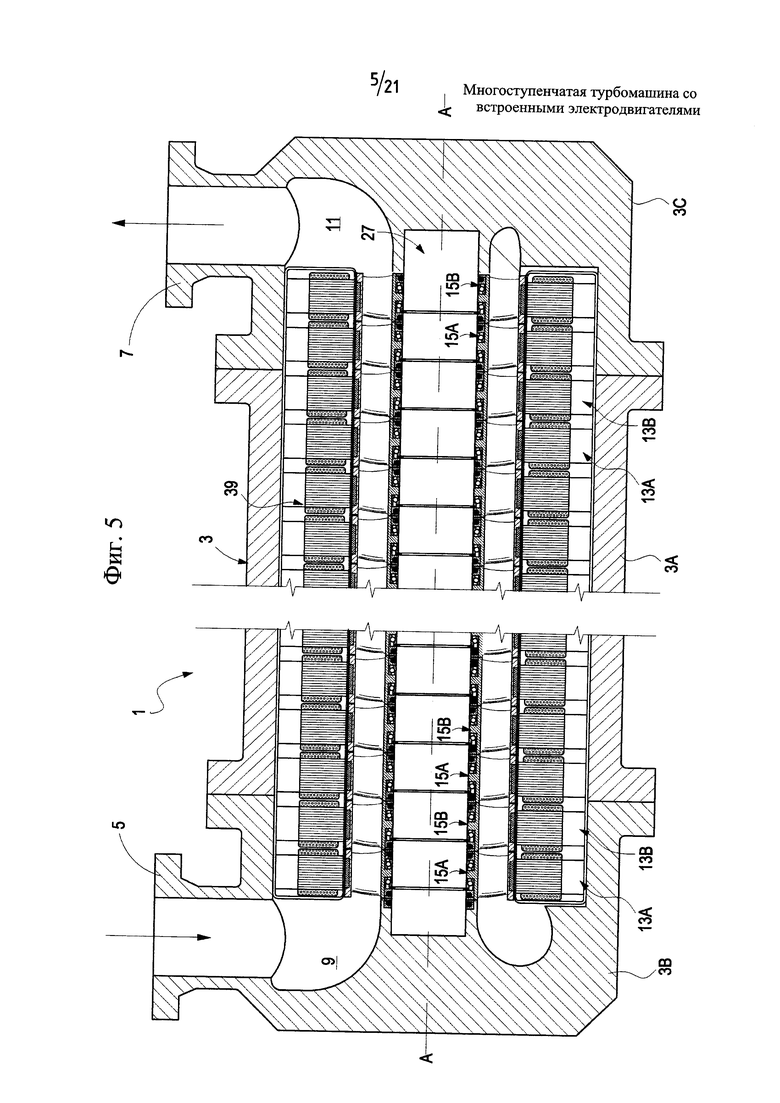
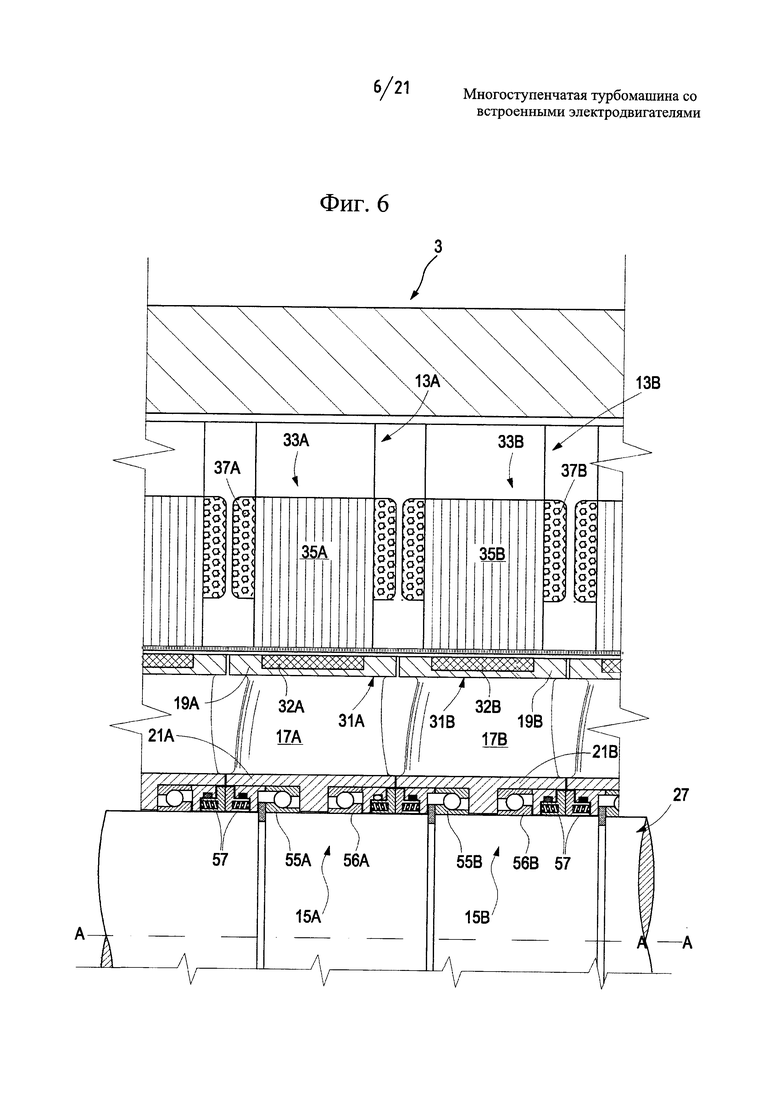
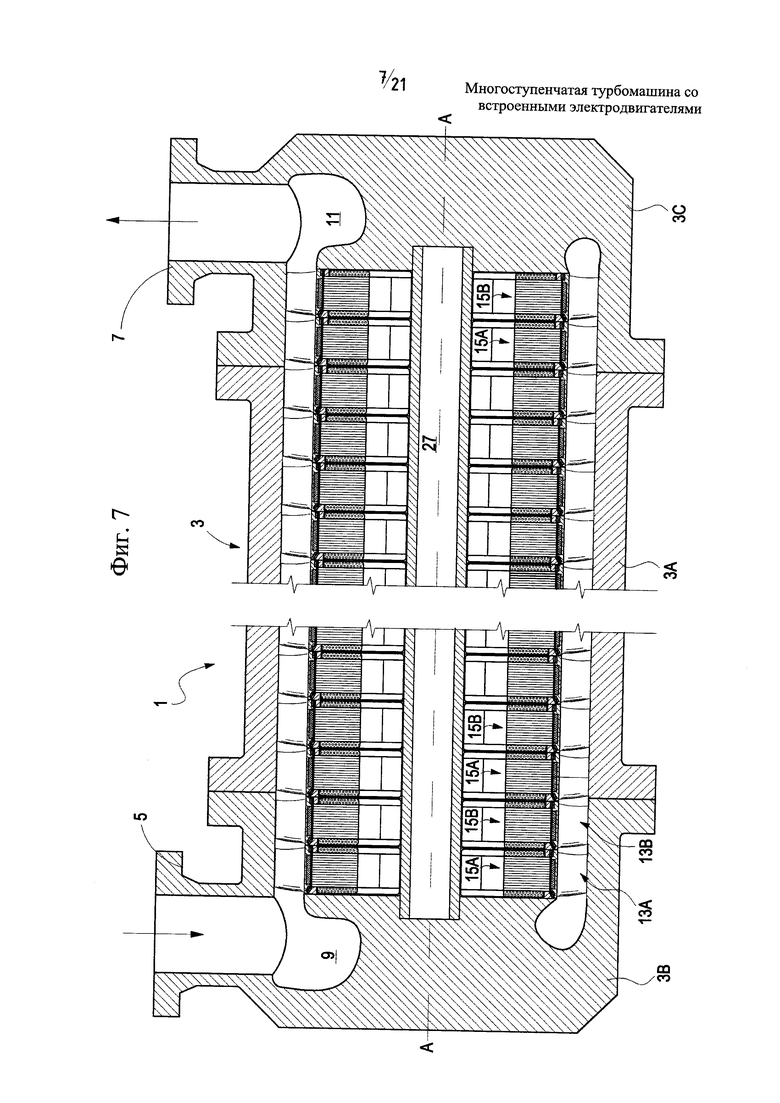
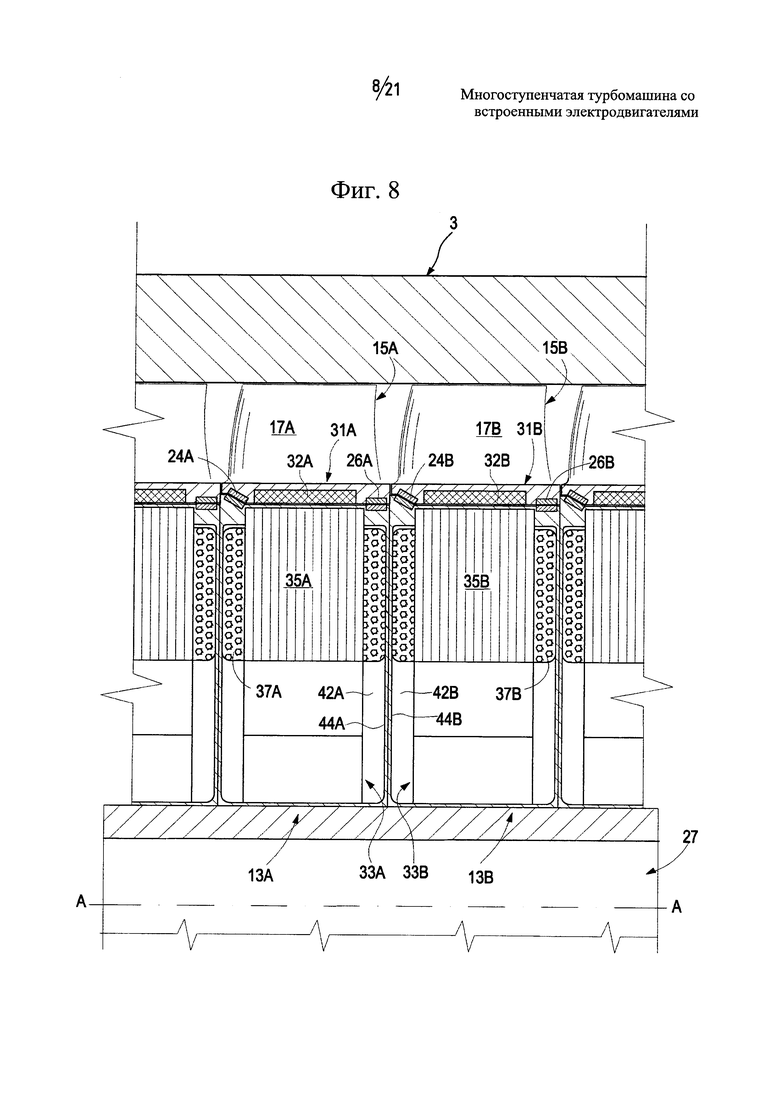
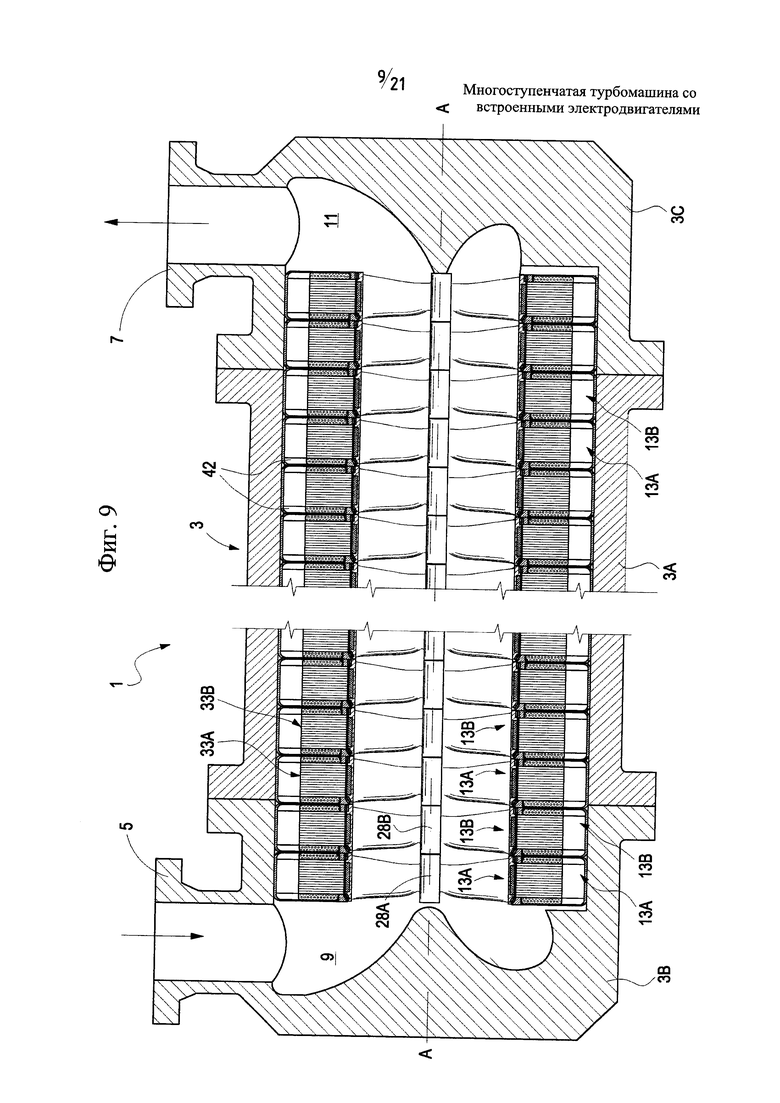
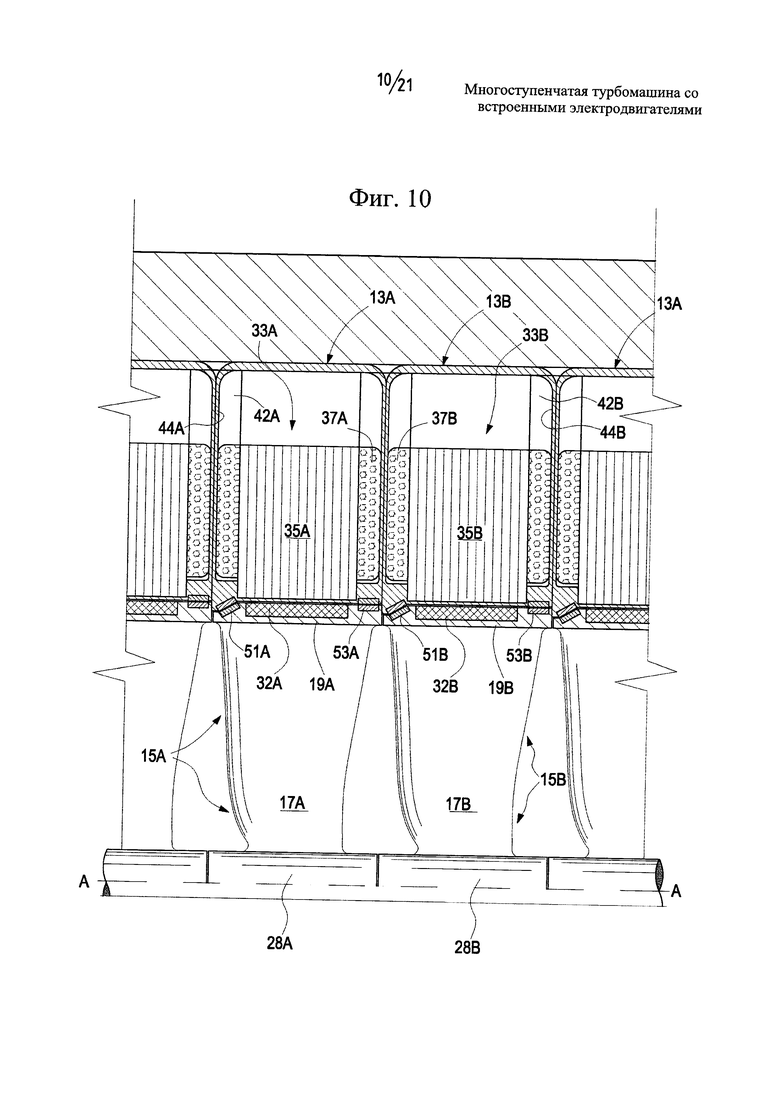
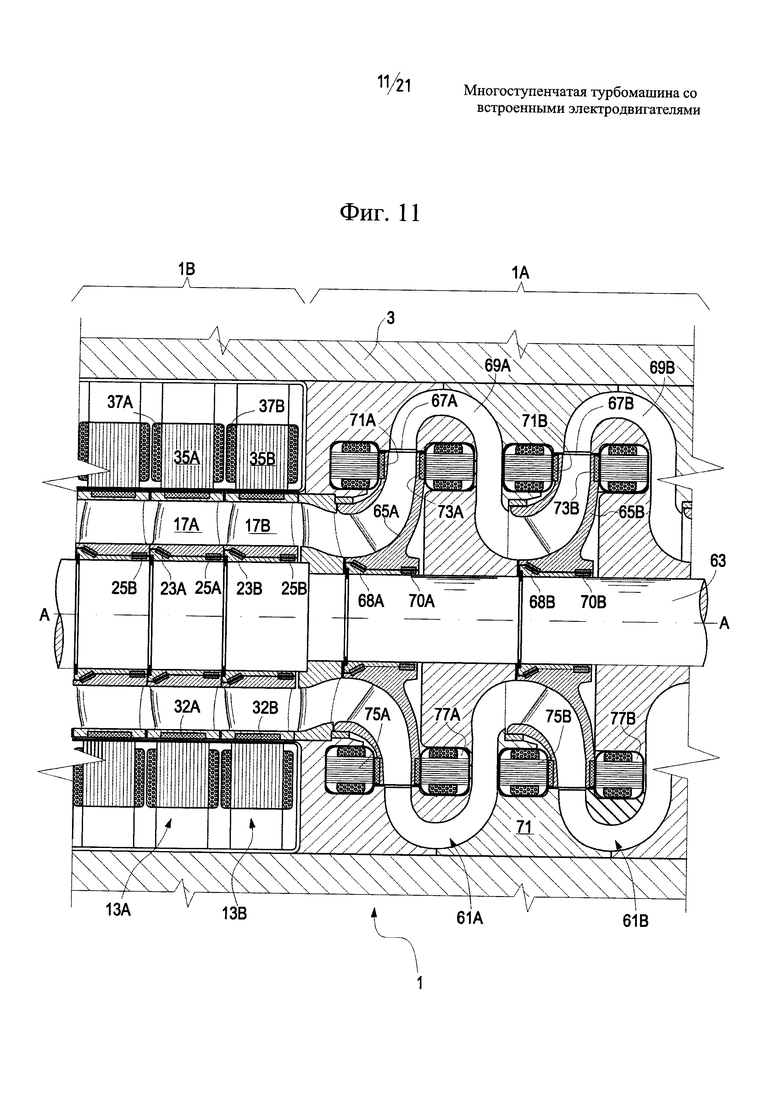

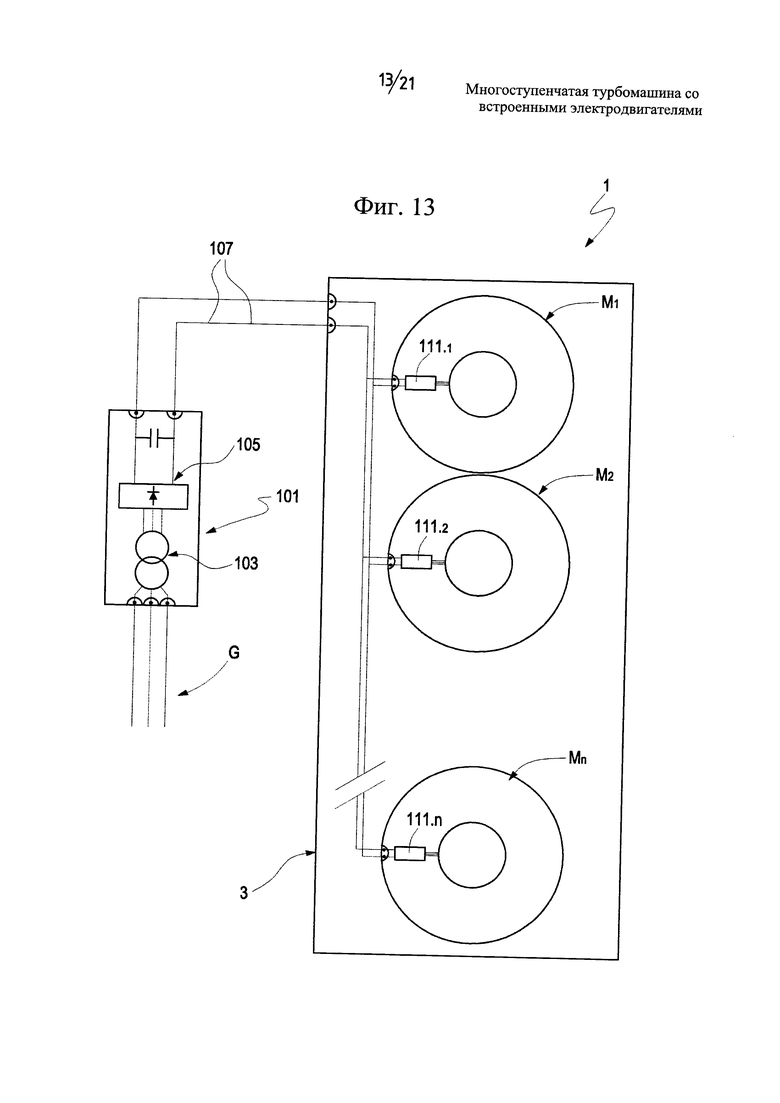
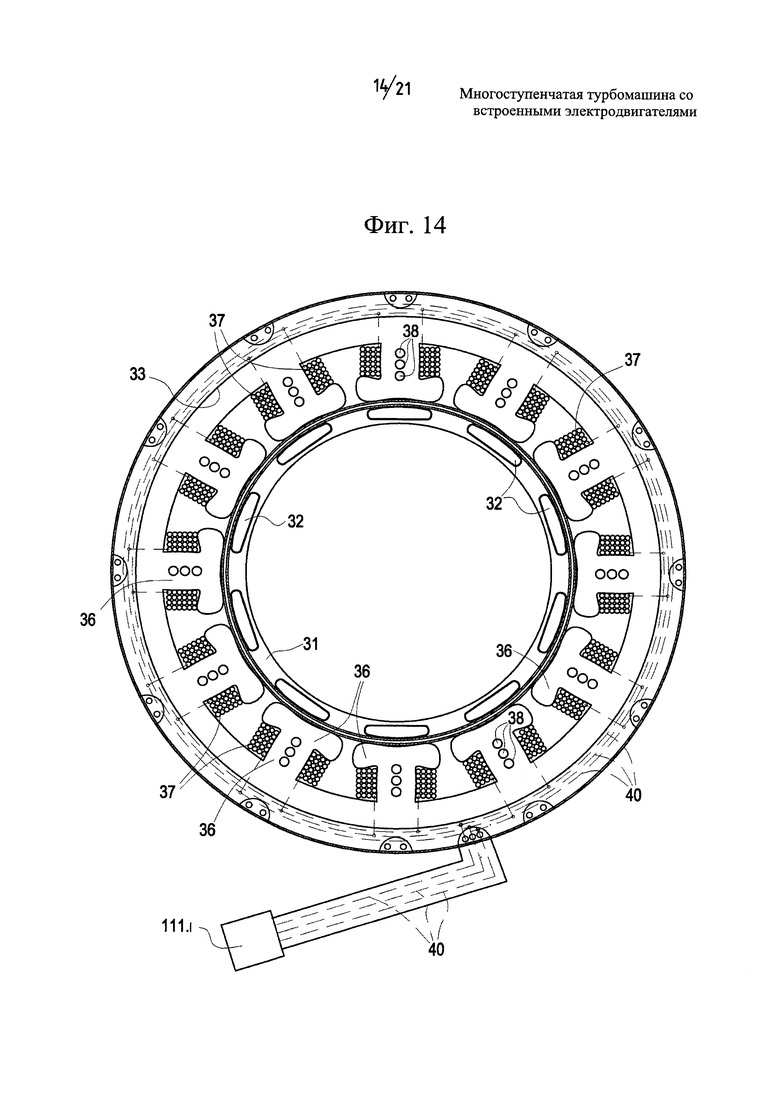
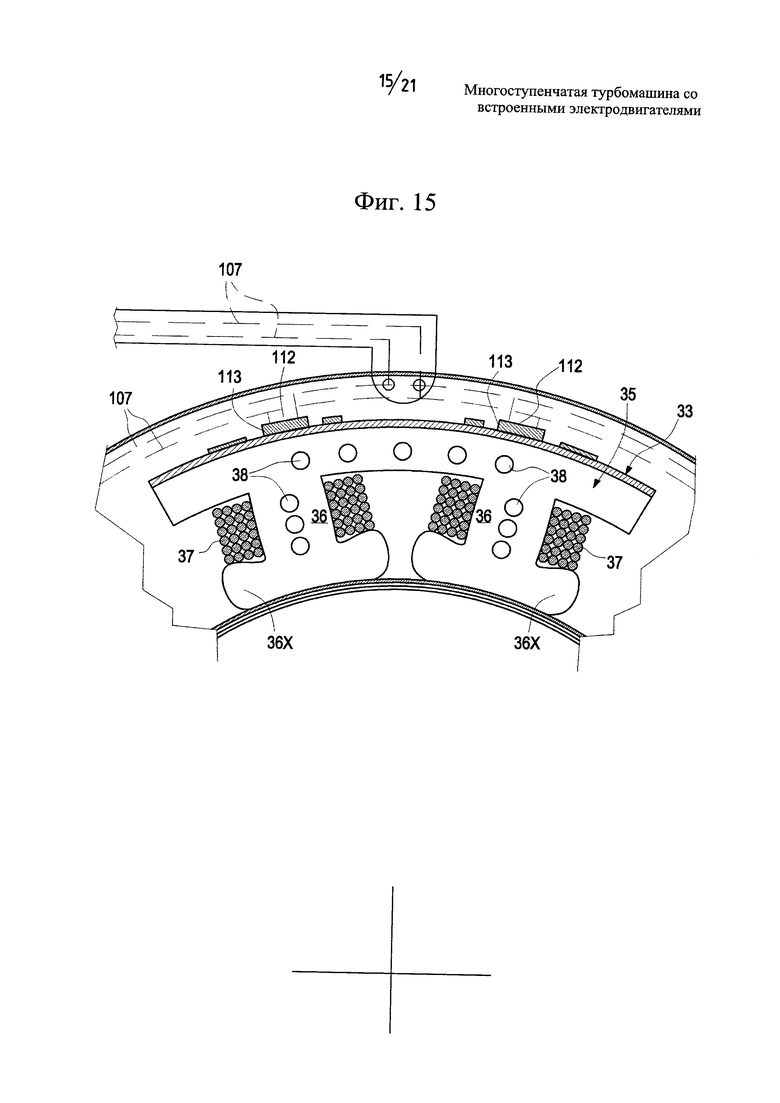
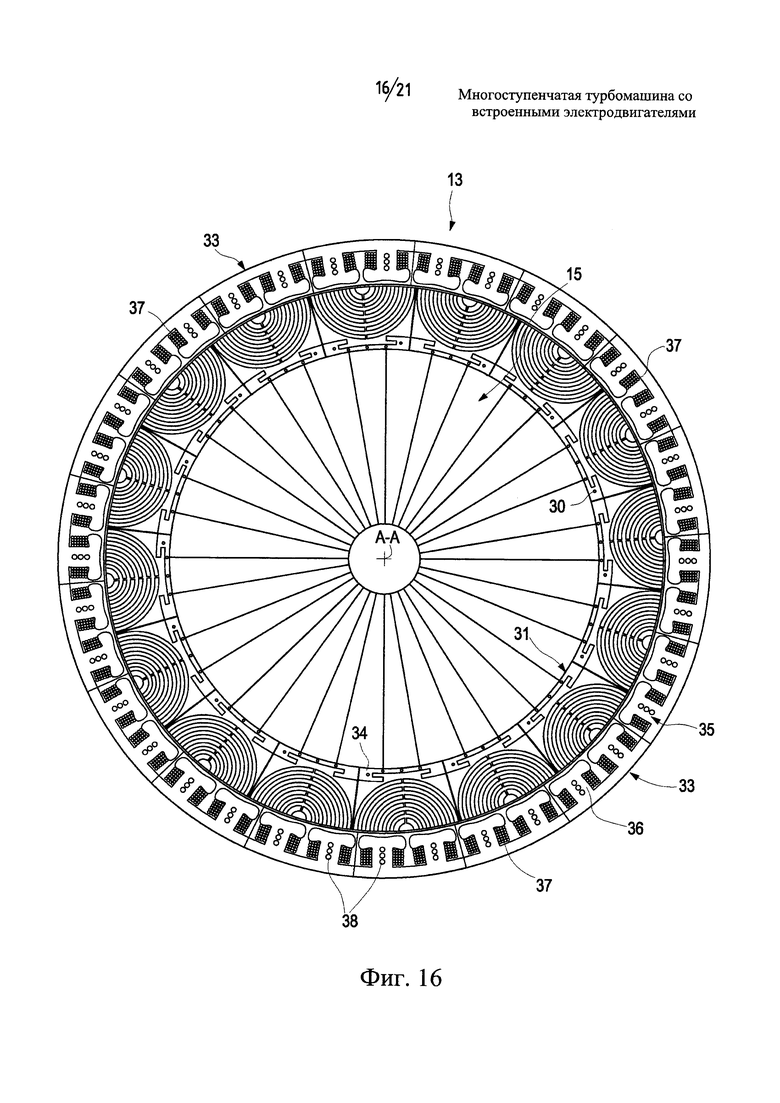
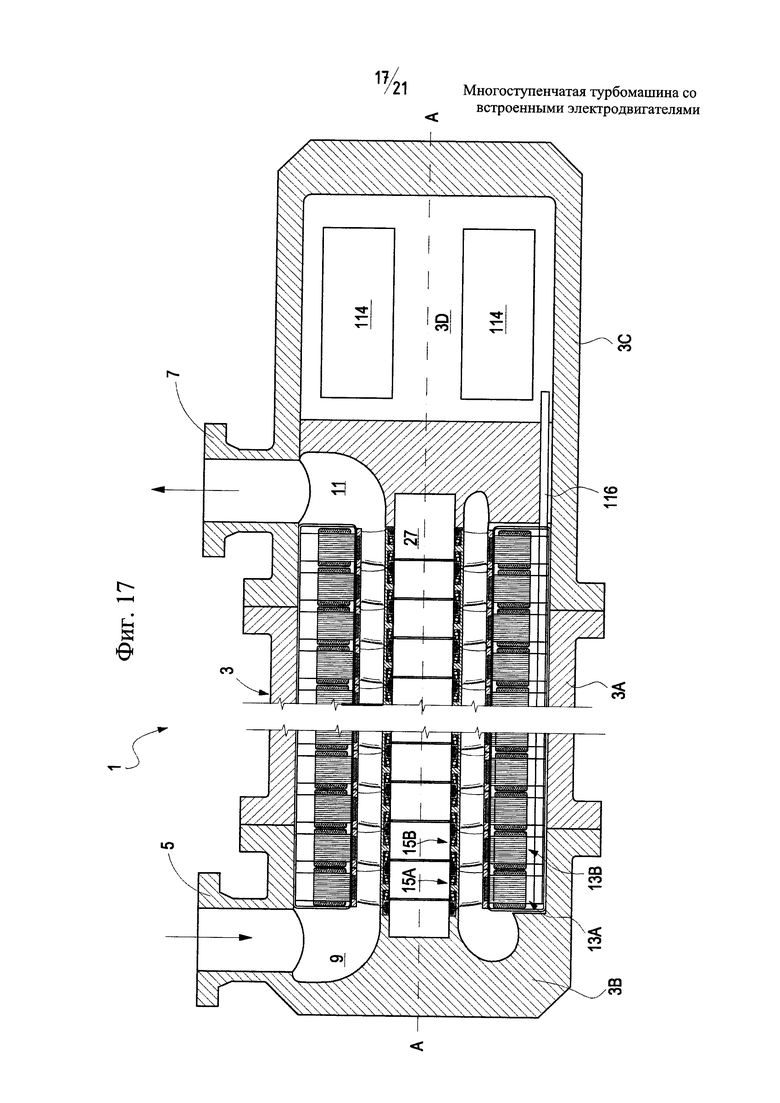
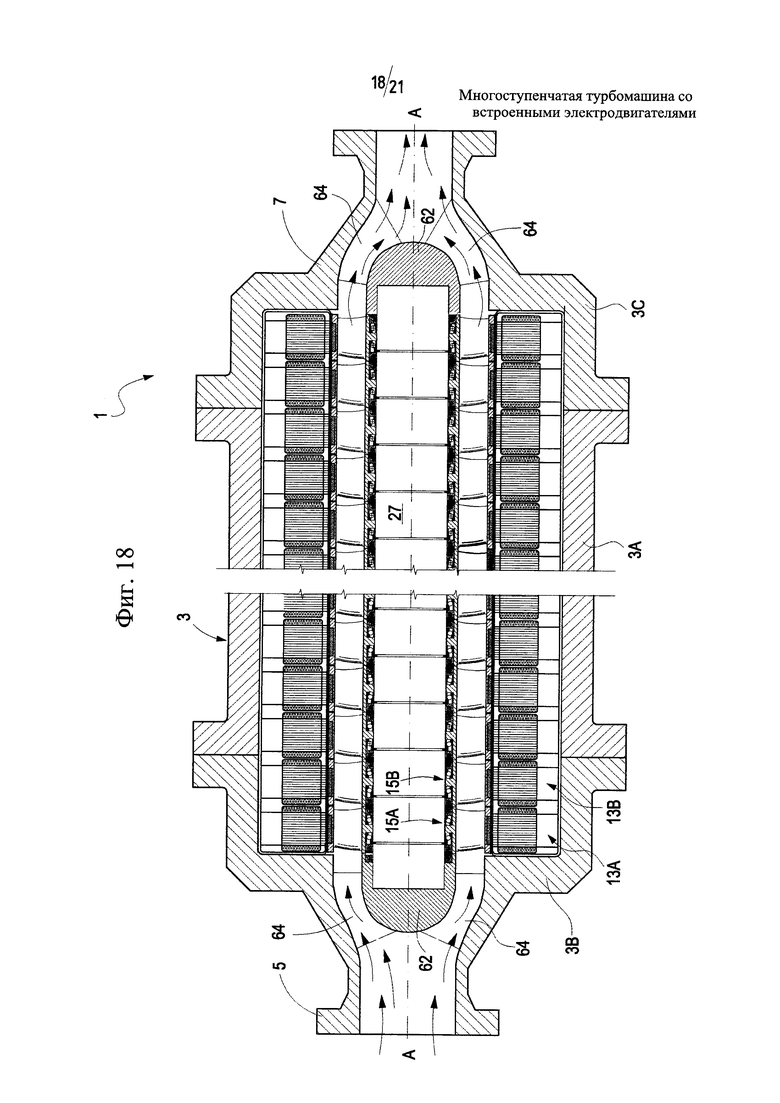

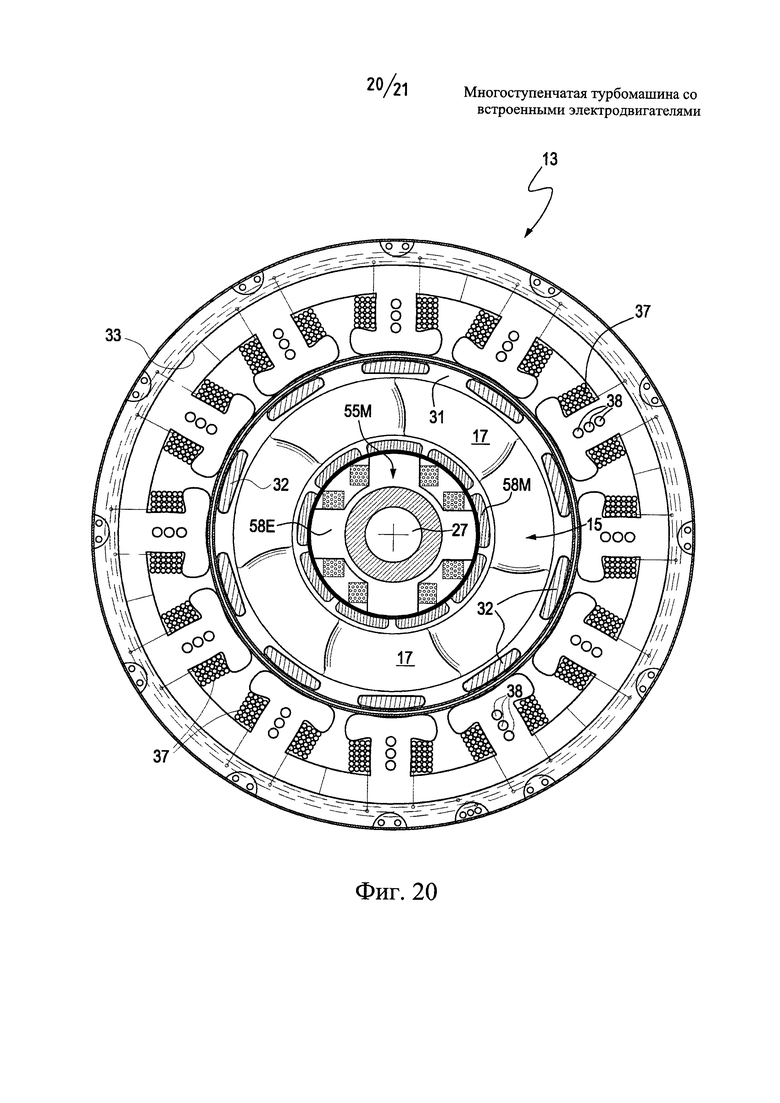
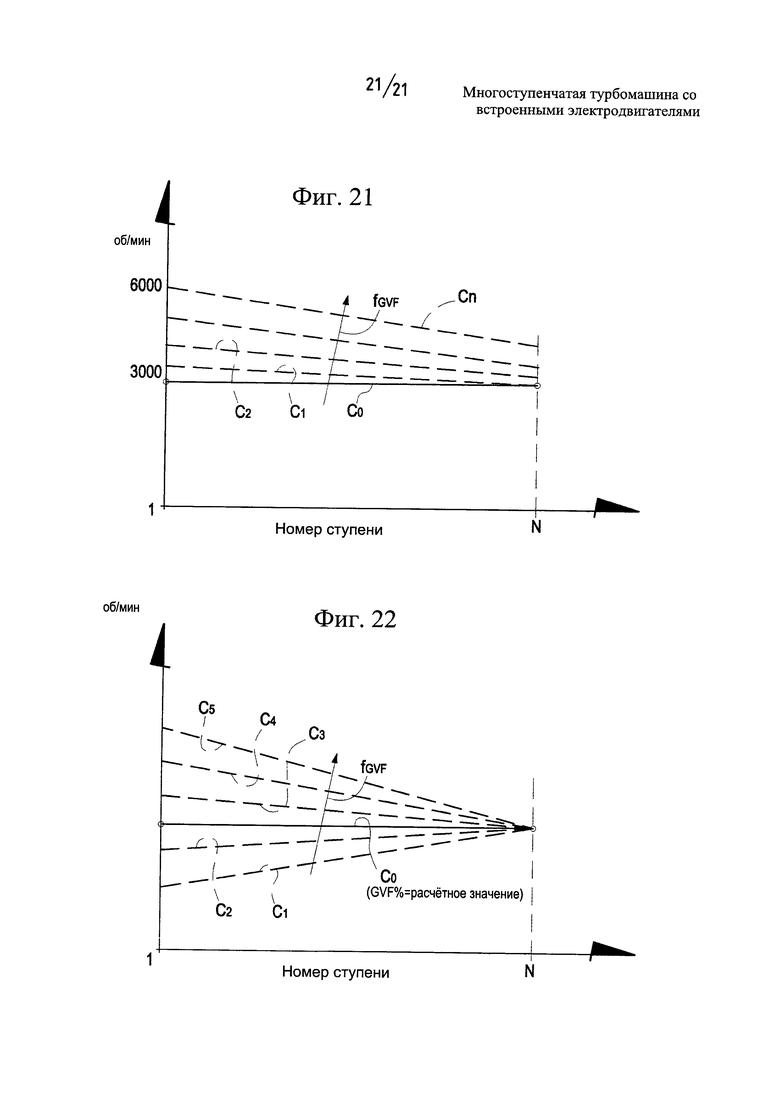
Предложена многоступенчатая турбомашина (1), содержащая корпус (3) с впускным отверстием (5) для текучей среды и выпускным отверстием (7) для текучей среды и несколько ступеней (13А, 13В), расположенных в корпусе (3). Проточный канал проходит от впускного отверстия (5) для текучей среды к выпускному отверстию (7) для текучей среды через указанные последовательно расположенные ступени (13А, 13В). Каждая ступень состоит из вращающегося рабочего колеса (17А, 17В) и электродвигателя, встроенного в корпусе (3) и расположенного с возможностью вращения рабочего колеса (17А, 17В) с управляемой скоростью вращения. Каждый электродвигатель содержит ротор (31А, 31В), расположенный на рабочем колесе (17А, 17В) и вращающийся с ним как одно целое, и статор (33А, 33В), неподвижно расположенный в корпусе (3). Пары последовательно расположенных рабочих колес выполнены с возможностью вращения в противоположных направлениях. 2 н. и 22 з.п. ф-лы, 22 ил.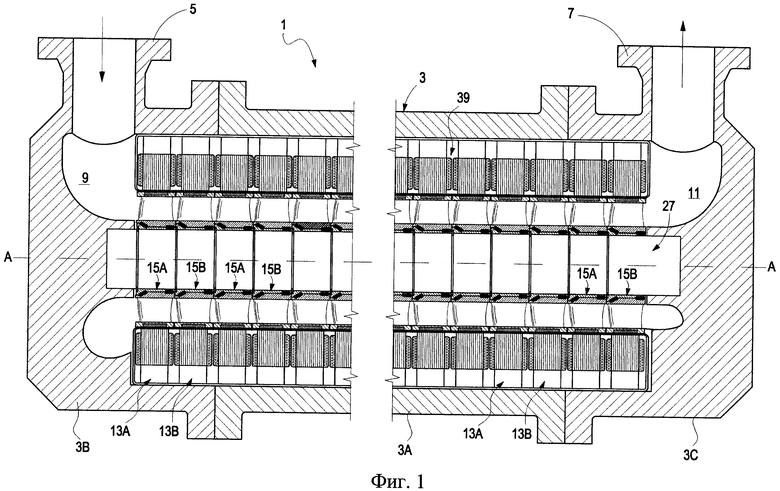
1. Многоступенчатая турбомашина, содержащая корпус с впускным отверстием для текучей среды и выпускным отверстием для текучей среды и ступени, расположенные в указанном корпусе, причем от впускного отверстия для текучей среды к выпускному отверстию для текучей среды через указанные последовательно расположенные ступени проходит проточный канал, и каждая ступень содержит вращающееся рабочее колесо и электродвигатель, встроенный в корпус и расположенный с возможностью вращения рабочего колеса с управляемой скоростью вращения,
при этом каждый электродвигатель содержит ротор, расположенный на рабочем колесе и вращающийся с ним как одно целое, и статор, неподвижно расположенный в корпусе, при этом пары последовательно расположенных рабочих колес выполнены с возможностью вращения в противоположных направлениях,
причем турбомашина содержит устройство управления, установленное и выполненное с возможностью вращения каждого рабочего колеса со скоростью вращения, которая может меняться от одного рабочего колеса к другому.
2. Турбомашина по п. 1, в которой рабочие колеса, вращающиеся в противоположных направлениях, расположены непосредственно рядом друг с другом.
3. Турбомашина по п. 1, в которой указанное устройство управления выполнено с возможностью управления по меньшей мере одним параметром электродвигателей в зависимости от по меньшей мере одного параметра, связанного с коэффициентом сжатия.
4. Турбомашина по п. 3, в которой указанный по меньшей мере один параметр электродвигателей выбран из группы, состоящей из скорости вращения, крутящего момента, мощности или их комбинации.
5. Турбомашина по п. 3, в которой указанный по меньшей мере один параметр, связанный с коэффициентом сжатия, пропорционален объемной доле газа текучей среды.
6. Турбомашина по п. 1, дополнительно содержащая центральный невращающийся вал.
7. Турбомашина по п. 6, в которой рабочие колеса по меньшей мере некоторых из ступеней с возможностью вращения поддерживаются на указанном центральном невращающемся валу с помощью соответствующих подшипников.
8. Турбомашина по п. 1, в которой рабочие колеса по меньшей мере некоторых из ступеней поддерживаются на соответствующих статорах электродвигателя с помощью соответствующих подшипников.
9. Турбомашина по п. 1, в которой статор электродвигателя по меньшей мере некоторых из указанных ступеней расположен вокруг соответствующего ротора электродвигателя, установленного на рабочем колесе, при этом статор электродвигателя окружает ротор электродвигателя.
10. Турбомашина по п. 9, в которой осевой размер статора электродвигателя равен или меньше осевого размера соответствующего рабочего колеса.
11. Турбомашина по п. 1, в которой по меньшей мере некоторые из ступеней содержат последовательно расположенные осевые рабочие колеса.
12. Турбомашина по п. 1, дополнительно содержащая опорные подшипники, смазываемые и охлаждаемые текучей средой, пропускаемой через турбомашину.
13. Турбомашина по п. 1, дополнительно содержащая жидкостно-газовый сепаратор, расположенный ниже по потоку от выпускного отверстия для текучей среды и содержащий по меньшей мере один канал из канала для рециркуляции жидкости и канала для рециркуляции газа,
причем канал для рециркуляции жидкости проточно сообщается с охлаждаемыми жидкостью опорными подшипниками по меньшей мере некоторых из указанных рабочих колес, и/или канал для рециркуляции газа проточно сообщается с зазором между статором и ротором электродвигателя по меньшей мере некоторых из указанных рабочих колес.
14. Турбомашина по п. 1, в которой ротор электродвигателя по меньшей мере некоторых из ступеней содержит постоянные магниты.
15. Турбомашина по п. 14, в которой по меньшей мере некоторые из рабочих колес имеют бандаж, при этом указанные постоянные магниты расположены на бандаже соответствующего рабочего колеса.
16. Турбомашина по п. 1, в которой каждая ступень содержит цепь управления электропитанием, расположенную в корпусе, для управления соответствующим электродвигателем.
17. Турбомашина по п. 1, в которой скорость вращения рабочих колес ступеней управляется таким образом, что она уменьшается от впускного отверстия к выпускному отверстию в соответствии с увеличением плотности текучей среды через ступени.
18. Турбомашина по п. 1, в которой встроенные электродвигатели содержат статор с модульной конструкцией, состоящей из нескольких магнитопроводов, расположенных по окружности вокруг оси вращения, причем каждый магнитопровод содержит по меньшей мере одну электрическую обмотку, намотанную вокруг соответствующего магнитного сердечника.
19. Турбомашина по любому из пп. 1-18, в которой встроенные электродвигатели содержат ротор, имеющий модульную конструкцию.
20. Способ повышения давления текучей среды с переменным коэффициентом сжатия, включающий этапы
последовательного размещения нескольких рабочих колес с возможностью вращения в корпусе турбомашины;
установки электродвигателя для каждого рабочего колеса, причем указанные электродвигатели встроены в указанный корпус;
обеспечения вращения последовательно расположенных рабочих колес в противоположных направлениях при помощи указанных встроенных электродвигателей;
обеспечения пропускания текучей среды через рабочие колеса, повышения давления текучей среды от пониженного давления до повышенного давления;
управления по меньшей мере одним рабочим параметром встроенных электродвигателей таким образом, чтобы рабочие колеса вращались с разной скоростью вращения.
21. Способ по п. 20, в котором указанным по меньшей мере одним рабочим параметром встроенных электродвигателей управляют в зависимости от параметра, связанного с коэффициентом сжатия текучей среды.
22. Способ по п. 20, в котором обеспечивают вращение встроенных электродвигателей со скоростью вращения, которая уменьшается от самого верхнего по потоку рабочего колеса к самому нижнему по потоку рабочему колесу.
23. Способ по п. 21, в котором обеспечивают вращение встроенных электродвигателей со скоростью вращения, которая уменьшается от самого верхнего по потоку рабочего колеса к самому нижнему по потоку рабочему колесу, при этом разность скоростей между самым верхним по потоку рабочим колесом и самым нижним по потоку рабочим колесом устанавливают в зависимости от параметра, связанного с коэффициентом сжатия текучей среды.
24. Способ по любому из пп. 20-23, в котором указанный рабочий параметр выбирают из группы, состоящей из скорости вращения, крутящего момента, мощности или их комбинации.
| US 20090067983 A1, 12.03.2009 | |||
| EP 398156 A3, 22.11.1990 | |||
| US 4147473 A1, 03.04.1979 | |||
| МНОГОСТУПЕНЧАТЫЙ КОМПРЕССОР ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2002 |
|
RU2235913C2 |

