УРОВЕНЬ ТЕХНИКИ
В области разведки и добычи нефти и газа обычно используются датчики давления, находящиеся на поверхности, для считывания данных, предоставляемых акустическими преобразователями в скважине. Данные, создаваемые акустическими преобразователями, проходят через буровой раствор вдоль ствола скважины. Существуют различные схемы модуляции, которые могут использоваться для кодирования данных. Некоторые схемы модуляции с использованием импульсов включают в себя фазово-импульсную модуляцию (ФИМ), дифференциальную фазово-импульсную модуляцию (ДФИМ) и широтно-импульсную модуляцию (ШИМ). В этих и других схемах модуляции пакеты данных разбиваются на символы. Каждый символ делится на фиксированные интервалы, называемые «элементами сигнала». Каждый символ содержит, по меньшей мере, один период с единицами («1»), который и формирует импульс. В ФИМ данные кодируются положением импульса в символе. В ДФИМ данные кодируются в соответствии с расстоянием от предыдущего импульса. В ШИМ информация кодируется по ширине импульса. В приведенном выше примере положение, расстояние и ширина измеряются как целые числа «элементов сигнала». Вместе с длиной символа возрастает количество передаваемой информации. Однако при увеличении длины символа также увеличивается время, необходимое для передачи сигнала, в результате чего скорость передачи остается неизменной, если даже не снижается, и имеет увеличенную длину символа. Попытки увеличить скорость передачи были сосредоточены на совершенствовании аппаратных средств акустического преобразователя, таких как, например, сокращение времени восстановления акустических излучателей и детекторов. Однако подобный подход дорогостоящий и обеспечивает медленный прогресс при незначительных улучшениях. Другие подходы направлены на уменьшение ширины элемента сигнала и увеличение скорости передачи символов. Однако эти способы ограничиваются доступным отношением сигнал-шум (ОСШ). Когда частота следования элементов сигнала увеличивается, импульсы становятся более узкими, и это снижает ОСШ передачи данных, увеличивая коэффициент битовых ошибок (КБО).
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Приведенные ниже чертежи включены для иллюстрации некоторых аспектов настоящего изобретения и не должны рассматриваться в качестве исчерпывающих вариантов реализации изобретения. Раскрываемый объект изобретения допускает значительные модификации, изменения, комбинации и эквиваленты по форме и функции без отклонения от объема настоящего изобретения.
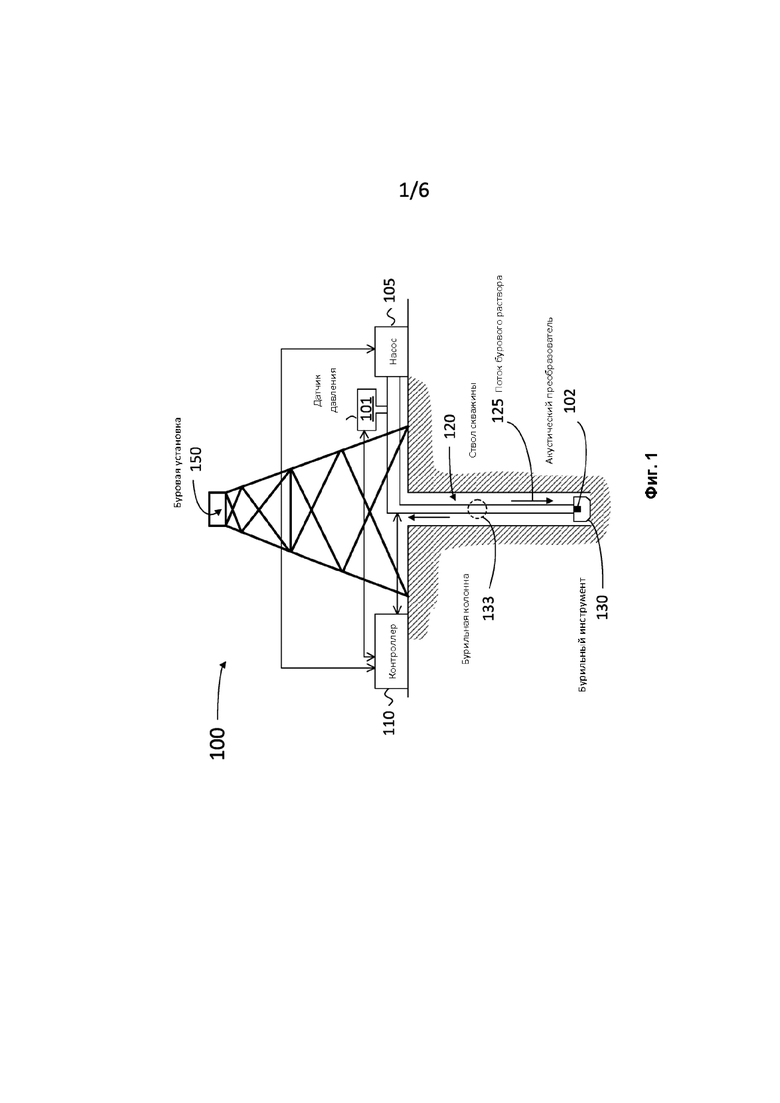
Фиг. 1 иллюстрирует буровую систему, использующую датчик давления, выполненный с возможностью передачи данных для цифровой обработки сигналов в гидроимпульсной телеметрии, согласно некоторым вариантам реализации изобретения.
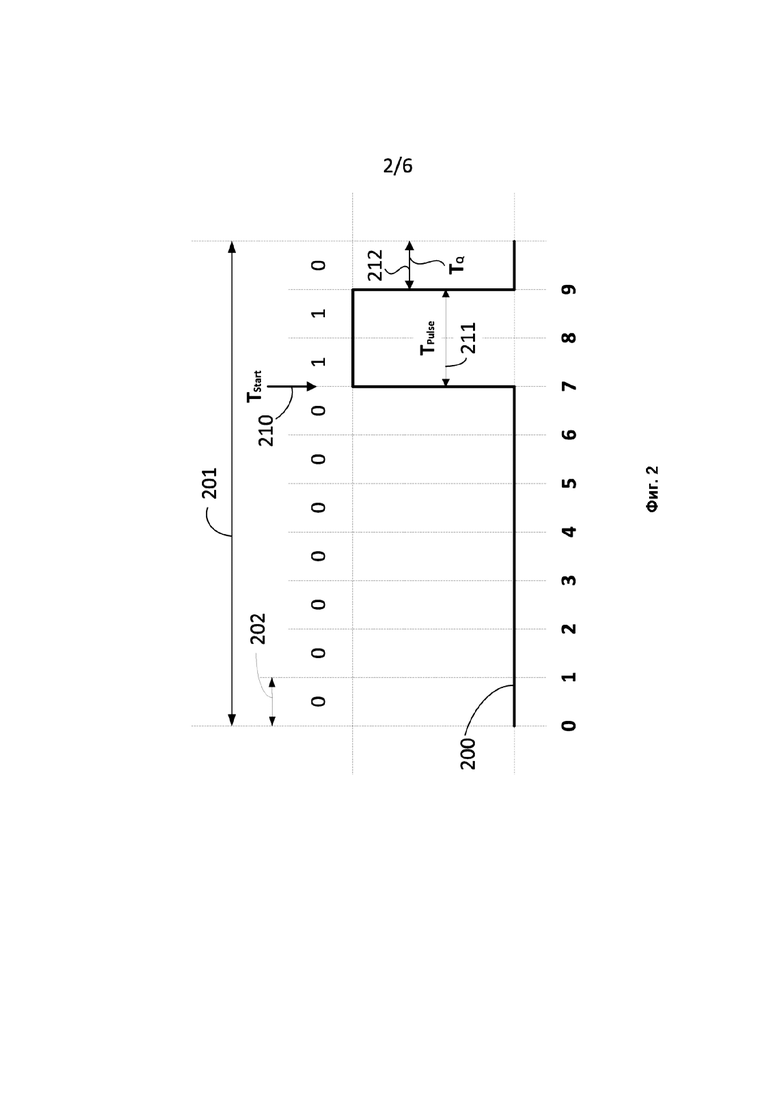
Фиг. 2 иллюстрирует схему формы сигнала фазово-импульсной модуляции (ФИМ) в способе цифровой обработки сигналов согласно некоторым вариантам реализации изобретения.
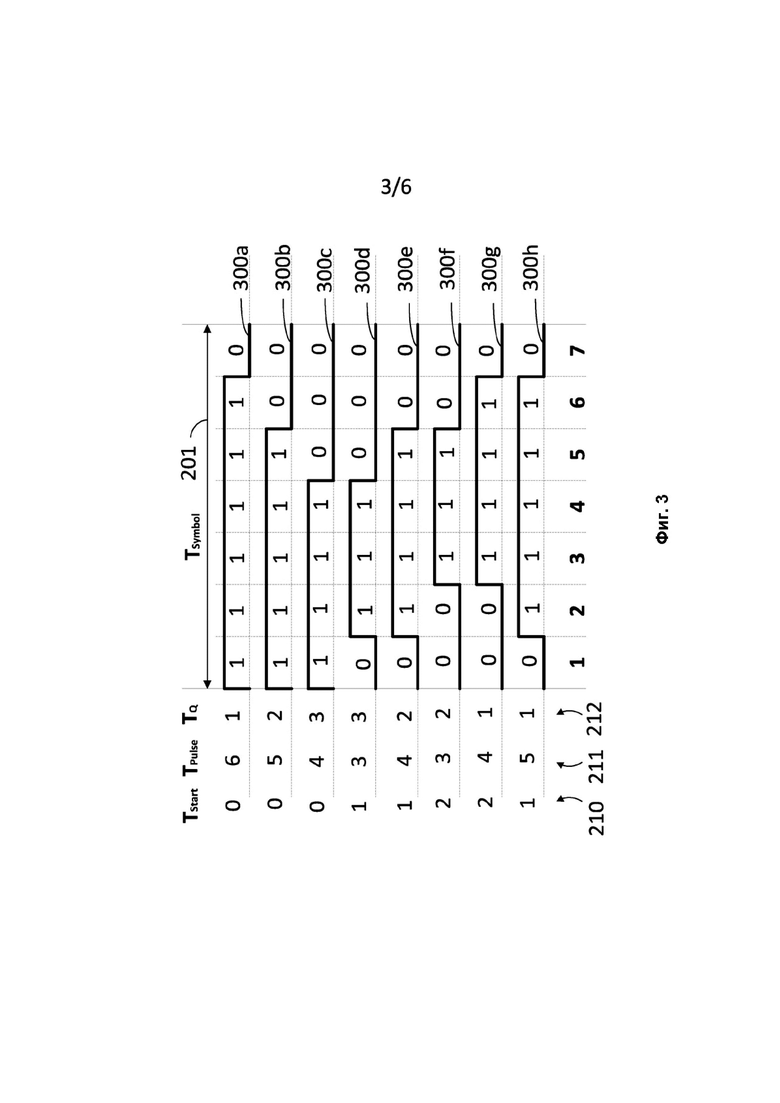
Фиг. 3 иллюстрирует множество форм сигналов, включая схему фазово-импульсной модуляции (ФИМ) и схему широтно-импульсной модуляции (ШИМ), в конфигурации отображения Грея для цифровой обработки сигналов в гидроимпульсной телеметрии согласно некоторым вариантам реализации изобретения.
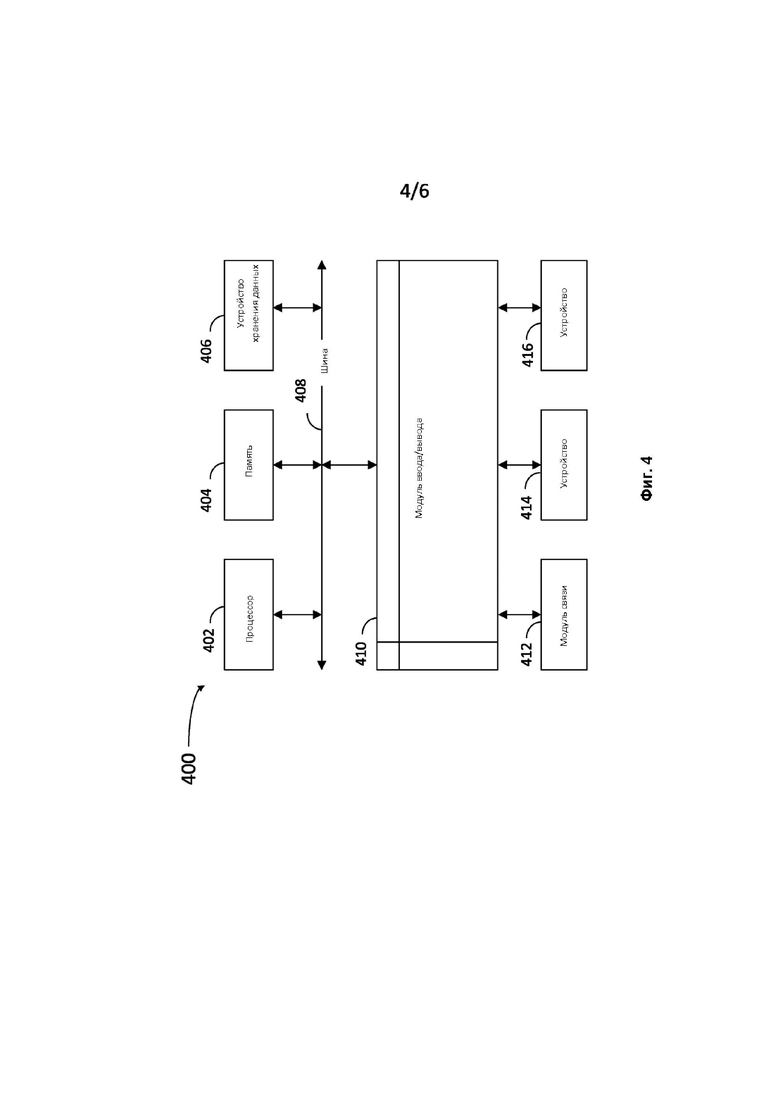
Фиг. 4 иллюстрирует компьютерную систему, выполненную с возможностью цифровой обработки сигналов в гидроимпульсной телеметрии, согласно некоторым вариантам реализации изобретения.
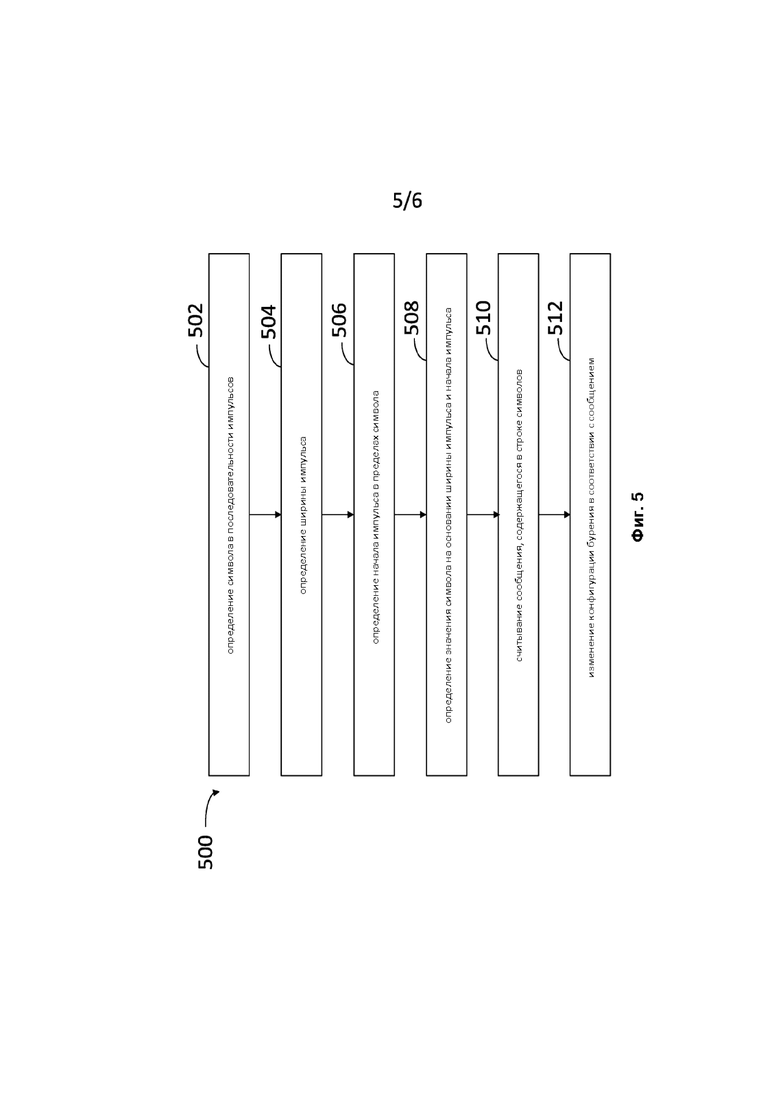
Фиг. 5 иллюстрирует блок-схему, включающую этапы в способе цифровой обработки сигналов в гидроимпульсной телеметрии, согласно некоторым вариантам реализации изобретения.
Фиг. 6 иллюстрирует блок-схему, включающую этапы в способе цифровой обработки сигналов в гидроимпульсной телеметрии, согласно некоторым вариантам реализации изобретения.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к способам и устройствам для схем телеметрии, используемых при разведке и добыче нефти и газа, и, более конкретно, к способам и устройствам для цифровой обработки сигналов в гидроимпульсной телеметрии. Соответственно, варианты реализации изобретения, раскрытые в данном документе, обеспечивают схемы модуляции с отображением символов, что увеличивает скорость передачи данных гидроимпульсной телеметрии, а также уменьшает коэффициент битовых ошибок (КБО) в приемнике.
В гидроимпульсной телеметрии, одним из популярных типов схемы модуляции на основе амплитудной манипуляции (АМ) является фазово-импульсная модуляция (ФИМ). В схемах ФИМ символ данных имеет фиксированную длительность, а положение импульса в пределах периода символа указывает значение символа. Другие способы, применимые к вариантам реализации в соответствии с настоящим изобретением, включают, без ограничения, схемы широтно-импульсной модуляции (ШИМ). В схемах ШИМ символ данных связан с длительностью последовательности импульсов, поэтому передача данных включает переменное число последовательных импульсов в каждом пакете данных. Как правило, коэффициент битовых ошибок (КБО) и скорость передачи данных сигналов, передаваемых в гидроимпульсной телеметрии, зависят от физических ограничений в акустических преобразователях, которые генерируют и считывают сигналы. Варианты реализации изобретения, раскрытые в данном документе, увеличивают скорость передачи данных в битах с использованием комбинации ФИМ и ШИМ, сохраняя неизменной частоту следования элементов сигнала.
Например, акустические преобразователи обычно имеют время отклика, определяемое временем заряда/разряда конденсатора в цепи, которая создает акустические импульсы. Такая задержка определяет минимальный интервал времени между двумя последовательными импульсами. Кроме того, каждый акустический импульс сам по себе имеет минимальную длительность, также связанную с временным откликом акустического преобразователя и шириной полосы пропускания акустического канала, образованного потоком бурового раствора. Другим фактором, который принимают во внимание, является ограниченное общее число импульсов за время эксплуатации акустического преобразователя и его ограниченное время отклика. Таким образом, сигнальные схемы, описанные в данном документе, оптимально используют ограниченное число импульсов, генерируемых акустическим преобразователем. Эти ограничения усугубляются в известных конфигурациях бурения, в которых акустический преобразователь может находиться на глубине до 5000 футов (около 1500 м), 10000 футов (около 3000 м), 20000 футов (около 6000 м) или даже 30000 футов (около 9000 м) ниже поверхности в любой конфигурации бурения. Соответственно, варианты реализации изобретения, описанные в данном документе, выполнены с возможностью работы на каждой из упомянутых выше различных глубин без существенного изменения в производительности.
В настоящем документе предложены системы и способы для цифровой обработки сигналов гидроимпульсной телеметрии. Способ в соответствии с вариантами реализации изобретения, описанными в данном документе, может включать определение символа в последовательности импульсов, определение ширины импульса для импульса в символе и определение начала импульса для импульса в символе. Способ может дополнительно включать определение значения символа на основании ширины импульса и начала импульса, считывание сообщения с использованием значения символа для каждого символа в строке символов и изменение конфигурации бурения в соответствии с сообщением. В других вариантах реализации изобретения, способ включает отображение символа в последовательности импульсов с использованием ширины импульса и начала импульса в символе, считывание сообщения с использованием значения символа для каждого символа в строке символов и изменение конфигурации бурения в соответствии с сообщением.
Устройство согласно некоторым вариантам реализации изобретения содержит схему памяти, хранящую команды, и процессорную схему, выполненную с возможностью выполнения команд. Выполнение команд процессорной схемой побуждает устройство идентифицировать символ в последовательности импульсов, связывать символ со значением символа, используя взаимно-однозначное соответствие между значением символа и характеристикой символа, и считывать сообщение, используя значение символа для каждого символа в строке символов. Кроме того, устройство может быть выполнено с возможностью изменения конфигурации бурения в соответствии с сообщением.
Способ согласно некоторым вариантам реализации изобретения включает определение условия бурения и создание сообщения на основании условия бурения. Способ дополнительно включает создание строки значений символов, содержащей сообщение. Способ может также включать определение ширины импульса и начала импульса на основании значения символа, обеспечение первого импульса в выбранном положении элемента импульса и обеспечение последующих импульсов для образования ширины импульса. В некоторых вариантах реализации изобретения, способ включает создание периода молчания в конце ширины импульса для каждого символа.
Фиг. 1 иллюстрирует буровую систему 100, использующую датчик давления 101, выполненный с возможностью подавления отражений импульсов в конфигурации телеметрии с импульсной модуляцией, согласно некоторым вариантам реализации изобретения. Буровая система 100 может быть системой каротажа во время бурения (КВБ), хорошо известной в нефтегазовой промышленности. Насос 105 поддерживает поток бурового раствора 125 в стволе скважины 120, пробуренном бурильным инструментом 130. Бурильная колонна 133 соединяет бурильный инструмент 130 с оборудованием на поверхности, таким как насос 105 и датчик давления 101. Инструменты поддерживаются буровой установкой 150. Контроллер 110 соединяется с датчиком давления 101, с насосом 105 и с акустическим преобразователем 102 через ствол скважины 120. Контроллер 110 может содержать компьютерную систему, выполненную с возможностью приема данных и передачи команд датчику давления 101, акустическому преобразователю 102 и насосу 105.
Установленный вблизи бурильного инструмента 130 акустический преобразователь 102 выполнен с возможностью передачи и приема с поверхности сообщений, содержащих информацию, которая относится к процессу бурения. Сообщения, создаваемые акустическим преобразователем 102, могут быть кодированными в цифровой форме последовательностями акустических импульсов, передаваемыми через поток бурового раствора 125 и считываемыми датчиком давления 101. Соответственно, для передачи сообщений между акустическим преобразователем 102 и датчиком давления 101 может использоваться множество способов модуляции цифрового сигнала, таких как ФИМ и ШИМ. В ответ на сообщения, передаваемые между датчиком давления 101 и акустическим преобразователем 102, контроллер 110 может регулировать конфигурацию бурения в буровой системе 100. Например, скорость бурения может быть увеличена, уменьшена или бурение может быть остановлено контроллером 110 на основании сообщений, полученных от акустического преобразователя 102. Кроме того, в некоторых вариантах реализации изобретения, контроллер 110 может побуждать бурильный инструмент 130 направляться в другую сторону. Например, в некоторых вариантах реализации изобретения, бурильный инструмент 130 может направляться из вертикальной конфигурации бурения (как проиллюстрировано на Фиг. 1) в горизонтальную или почти горизонтальную конфигурацию бурения. В некоторых вариантах реализации изобретения, регулирование конфигурации бурения может включать регулирование потока бурового раствора 125. Например, поток бурового раствора 125 может увеличиваться или уменьшаться, или может увеличиваться или уменьшаться давление, оказываемое насосом 105. Также, в некоторых вариантах реализации изобретения, регулирование конфигурации бурения может включать добавление химических реагентов и других добавок в поток бурового раствора 125 или удаление добавок из потока бурового раствора 125.
Фиг. 2 иллюстрирует форму сигнала фазово-импульсной модуляции (ФИМ) 200 в способе цифровой обработки сигналов согласно некоторым вариантам реализации изобретения. Форма сигнала ФИМ 200 соответствует символу в схеме цифровой обработки сигналов. Символ охватывает период времени Tsymbol 201, который делится на целое число подпериодов или «элементов сигнала», каждый из которых охватывает время Tchip 202. Параметрами, которые используются для описания формы сигнала ФИМ 200, являются K, Tpulse 211 и Tq 212. Параметр K указывает число бит в одном символе. Параметр Tpulse 211 представляет собой ширину импульса. Параметр Tq 212 представляет собой «период молчания» перед началом нового символа. Tq 212 позволяет физическому механизму преобразователя, генерирующего и детектирующего импульсы, восстановиться перед началом нового символа. В вариантах реализации изобретения, используемых для гидроимпульсной телеметрии, Tq 212 указывает период времени, в котором клапан генератора импульсов давления бурового раствора в датчике давления 101 или акустическом преобразователе 102 находится в исходном положении (см. Фиг. 1). В некоторых вариантах реализации изобретения, Tq 212 равно времени перезаряда батареи или конденсатора в датчике давления 101 или акустическом преобразователе 102, до того, как будет произведено другое действие открытия (для генератора отрицательных импульсов) или закрытия (для генератора положительных импульсов) генератора импульсов. Значение Tstart 210 указывает время в пределах Tsymbol 201, при котором начинается импульс. Далее в данном документе значения времени, такие как Tsymbol 201, Tpulse 211, Tq 212 и Tstart 210, будут задаваться в целых значениях, представляющих число периодов Tchip 202 в каждом интервале времени, в качестве единицы времени.
Фиг. 2 иллюстрирует форму сигнала ФИМ 200, где Tsymbol 201 равно 10, K равно трем (3), Tpulse 211 равно двум (2), а Tq 212 равно одному (1). Импульс в форме сигнала ФИМ 200 является положительным, хотя отрицательные импульсы также могут использоваться без отступления от объема настоящего изобретения. Положительный импульс возникает в начале 7-го элемента сигнала, в результате чего Tstart 210 равняется семи (7). Форма сигнала ФИМ 200 описывается двоичной последовательностью 0000000110. Последние три бита в двоичной последовательности, «110», представляют форму импульса в форме сигнала ФИМ 200. Соответственно, количество значений для Tstart 210, как проиллюстрировано на Фиг. 2 равняется восьми (8). То есть, символ в форме сигнала ФИМ 200 может принимать любое из восьми значений, которое в двоичном коде соответствует числовой строке с тремя битами (K = 3).
Таблица 1 иллюстрирует типовой вариант реализации изобретения, в котором Tsymbol 201 равно семи (7), Tpulse 211 равно трем (3), а Tq 212 равно одному (1). Используя модуляцию ФИМ, как и на Фиг. 1, в таблице 1 приведено представление двоичной последовательности исходной формы сигналов модуляции ФИМ и соответствующих значений символов. Следовательно, соответствующая двоичная битовая строка имеет К, равное 2 (двум).
ТАБЛИЦА 1
Для увеличения пропускной способности некоторые варианты реализации изобретения кодируют больше битов в пределах одного и того же Tsymbol 201 путем изменения Tpulse 211, тем самым комбинируя схему ФИМ и ШИМ. Для упрощения протокола передачи и для учета физических ограничений датчика в отношении быстродействия и чувствительности, некоторые варианты реализации изобретения имеют минимальное значение Tpulse 211. Аналогично, некоторые варианты реализации изобретения включают одну непрерывную последовательность импульсов на символ и минимальное значение Tq 212, равное 1 (одному), для всех символов. Соответственно, в некоторых вариантах реализации изобретения, Tpulse 211 может принимать значения от минимального значения до Tsymbol-Tq. Такая схема обеспечивает более широкий выбор форм сигналов в пределах Tsymbol 201. Каждой форме сигнала в новой схеме может быть присвоено уникальное значение символа. Соответственно, комбинация ШИМ с ФИМ создает более надежную и функциональную схему кодирования сигнала.
Фиг. 3 иллюстрирует множество форм сигналов 300a-h, включая ФИМ и ШИМ в схемах в конфигурации отображения Грея для цифровой обработки сигналов в гидроимпульсной телеметрии, согласно некоторым вариантам реализации изобретения. Каждая из форм сигналов 300a-h имеет различную комбинацию значений для Tstart 210 и Tpulse 211 (см. Фиг. 2). В частности, каждая из форм сигналов 300a-h имеет значение Tpulse ≥ 3 и значение Tq ≥ 1. Формы сигналов 300a-h выбираются в соответствии со схемой «кодирования Грея» в дополнение к комбинации схем ФИМ и ШИМ. В схеме «кодирования Грея» формам сигналов в пределах Tsymbol 201, отличающимся только на 1 элемент сигнала, назначаются значения символов, которые отличаются только на 1 двоичный бит. При использовании кодирования Грея, когда происходит наиболее вероятная ошибка (т. е. одна ошибка элемента сигнала), ошибка символа соответствует только одной битовой ошибке.
Соответственно, каждая из форм сигналов 300a-h отличается от своего ближайшего соседа одним элементом сигнала. Например, форма сигнала 300c отличается от формы сигнала 300b в последнем элементе сигнала импульса: «0» для формы сигнала 300c и «1» для формы сигнала 300b. Аналогично, форма сигнала 300c отличается от формы сигнала 300d в первом элементе сигнала импульса: «1» для формы сигнала 300c и «0» для формы сигнала 300d. Схема кода Грея уменьшает величину ошибки сообщений или вычислительную ошибку из-за более высокого правдоподобия однобитовых ошибок в любой схеме передачи данных. Например, акустические отражения и шум бурильного инструмента могут исказить форму импульса, принимаемого в буровой системе 100 (см. Фиг. 1). Акустические отражения могут ошибочно увеличивать Tpulse 211 на один элемент сигнала. Менее вероятно, что акустические отражения увеличат Tpulse более чем на один элемент сигнала. Таким образом, форму сигнала 300c можно ошибочно принять за форму сигнала 300b или форму сигнала 300d можно ошибочно принять за форму сигнала 300c. Полученная ошибка в символе оказывает минимальное влияние на сообщение, так как два ошибочных символа в любом случае имеют последовательное значение (см. таблицу 2). Это помогает снизить коэффициент грубых битовых ошибок и облегчает использование модуля прямой коррекции ошибок для исправления оставшихся ошибок.
Комбинированная схема ФИМ и ШИМ, проиллюстрированная на Фиг. 3, использует восемь (8) из десяти (10) возможных форм сигналов. Для удовлетворения взаимно-однозначному отображению Грея из формы сигнала в значение символа, две формы сигнала отбрасываются. А именно, форма сигнала, имеющая Tstart = 0, Tpulse = 3 и Tq = 4, не проиллюстрирована ни на Фиг. 3, ни в таблице 2. Также, форма сигнала, имеющая Tstart = 3, Tpulse = 3 и Tq = 1, не включена ни в Фиг. 3, ни в таблицу 2. Соответственно, Фиг. 3 иллюстрирует, что варианты реализации изобретения, использующие Tsymbol 201 из семи элементов сигнала, могут надежно кодировать символы, соответствующие битовой строке K = 3. В таблице 2 приведены комбинированные формы сигналов ФИМ и ШИМ в виде кода Грея и соответствующие значения символов. Скорость передачи данных увеличилась на 50%, поскольку за тот же период символа вариант реализации изобретения, описанный в таблице 2, предоставляет 3 бита (8 значений символа) вместо 2 битов (4 значений символа, см. таблицу 2). Кроме того, отображение Грея помогает поддерживать низкий коэффициент битовых ошибок.
ТАБЛИЦА 2
Следует отметить, что в таблице 2, вследствие отображения Грея, символ 0 (форма сигнала 300a на Фиг. 3) и символ 7 (форма сигнала 300h на Фиг. 3) отличаются только одним элементом сигнала. Специалисту в данной области техники будет понятно, что возможны другие отображения, которые достигают той же цели.
В общем случае, для схемы ФИМ с произвольно выбранными значениями K, Tpulse и Tq, специалист в данной области техники может применить вышеупомянутый принцип для создания таблицы отображения символа в форму сигнала, которая минимизирует коэффициент грубых битовых ошибок.
Фиг. 4 иллюстрирует компьютерную систему 400, выполненную с возможностью цифровой обработки сигналов в гидроимпульсной телеметрии, согласно некоторым вариантам реализации изобретения. В соответствии с одним аспектом настоящего изобретения, компьютерная система 400 может быть включена в контроллер для буровой системы (например, контроллер 110 в буровой системе 100, см. Фиг. 1). Компьютерная система 400 содержит процессорную схему 402, связанную с шиной 408. Шина 408 может также соединять другие схемы в компьютерном устройстве 400, такие как схема памяти 404, устройство хранения данных 406, модуль ввода/вывода (ввод/вывод) 410, модуль связи 412 и периферийные устройства 414 и 416. В определенных аспектах, компьютерная система 400 может реализовываться с использованием аппаратного обеспечения или комбинации программного обеспечения и аппаратного обеспечения, либо на выделенном сервере, либо интегрироваться в другой объект, либо распределяться по нескольким объектам.
Компьютерная система 400 содержит шину 408 или другой механизм связи для передачи информации, а также процессорную схему 402, соединенную с шиной 408 для обработки информации. В качестве примера, компьютерная система 400 может быть реализована с одной или более процессорными схемами 402. Процессорная схема 402 может представлять собой микропроцессор общего назначения, микроконтроллер, цифровой процессор обработки сигналов (ЦПОС), специализированную интегральную схему (СИС), программируемую пользователем вентильную матрицу (ППВМ), программируемое логическое устройство (ПЛУ), контроллер, конечный автомат, логический вентиль, дискретные аппаратные компоненты или любой другой подходящий объект, который может выполнять вычисления или другие манипуляции с информацией.
Компьютерная система 400 содержит, помимо аппаратного обеспечения, код, который создает среду выполнения для рассматриваемой компьютерной программы, например, код, который представляет собой встроенное программное обеспечение процессора, стек протоколов, систему управления базами данных, операционную систему или одну или более их комбинаций, которые хранятся в содержащейся схеме памяти 404, такой как оперативное запоминающее устройство (ОЗУ), флэш-память, постоянное запоминающее устройство (ПЗУ), программируемое постоянное запоминающее устройство (ППЗУ), стираемое ППЗУ (СППЗУ), регистры, жесткий диск, съемный диск, CD-ROM, DVD или любое другое подходящее запоминающее устройство, соединенное с шиной 408 для хранения информации и команд, которые должны выполняться процессорной схемой 402. Процессорная схема 402 и схема памяти 404 могут быть дополнены логической схемой специального назначения или включены в нее.
Команды могут храниться в схеме памяти 404 и реализоваться в одном или более компьютерных программных продуктах, то есть в одном или более модулях команд компьютерной программы, закодированных на машиночитаемом носителе, для выполнения компьютерной системой 400 или для управления ей, и, в соответствии с любым способом, хорошо известным специалисту в данной области техники, включая, но не ограничиваясь этим, компьютерные языки, такие как ориентированные на обработку данных языки (например, SQL, dBase), системные языки (например, C, Objective-C, C ++, Assembly), архитектурные языки (например, Java, .NET) и языки приложений (например, PHP, Ruby, Perl, Python). Команды также могут быть реализованы в языках программирования, таких как массиво-ориентированные языки, аспектно-ориентированные языки, ассемблерные языки, авторские языки, языки интерфейса командной строки, компилируемые языки, языки параллельного программирования, языки в фигурных скобках, языки потоков данных, языки описания структуры данных, декларативные языки, эзотерические языки, языки расширений, языки четвертого поколения, функциональные языки, интерактивные языки, интерпретируемые языки, итерационные языки, языки на основе списков, небольшие языки, основанные на логике языки, машинные языки, макроязыки, языки метапрограммирования, многопарадигменные языки, численный анализ, языки, не основанные на английском языке, объектно-ориентированные языки на основе классов, объектно-ориентированные языки на основе прототипов, языки со значимыми отступами, процедурные языки, рефлексивные языки, языки на основе правил, языки сценариев, языки на основе стеков, синхронные языки, языки обработки синтаксиса, визуальные языки, языки Вирта, встраиваемые языки и языки на основе xml. Схема памяти 404 также может использоваться для хранения временной переменной или другой промежуточной информации во время выполнения команд, которые должны выполняться процессорной схемой 402.
Компьютерная программа, описанная в данном документе, необязательно соответствует файлу в файловой системе. Программа может храниться в части файла, содержащего другие программы или данные (например, один или более скриптов, хранящихся в документе на языке разметки), в отдельном файле, предназначенном для данной программы, или в нескольких связанных файлах (например, файлах, которые хранят один или более модулей, подпрограмм или частей кода). Компьютерная программа может быть развернута для выполнения на одном компьютере или на множестве компьютеров, расположенных на одном объекте либо распределенных между множеством объектов и соединенных между собой сетью связи. Процессы и логические блок-схемы, приведенных в данном описании изобретения, могут выполняться одним или более программируемыми процессорами, выполняющими одну или более компьютерных программ для реализации функций посредством работы с входными данными и генерации выходных данных.
Компьютерная система 400 дополнительно содержит устройство хранения данных 406, такое как магнитный диск или оптический диск, соединенное с шиной 408 для хранения информации и команд. Компьютерная система 400 соединяется с различными устройствами посредством модуля ввода/вывода 410. Модуль ввода/вывода 410 представляет собой любой модуль ввода/вывода. Примеры модулей ввода/вывода 410 включают порты данных, такие как порты USB. Модуль ввода/вывода 410 выполнен с возможностью соединения с модулем связи 412. Примеры модулей связи 412 включают сетевые интерфейсные карты, такие как карты Ethernet и модемы. В определенных аспектах, модуль ввода/вывода 410 выполнен с возможностью соединения с множеством устройств, таких как устройство ввода 414 и/или устройство вывода 416. Пример устройства ввода 414 включает клавиатуру и указывающее устройство, например мышь или трекбол, с помощью которых пользователь может вводить данные в систему 400. Для обеспечения взаимодействия с пользователем также могут использоваться другие виды устройств ввода 414, такие как устройство тактильного ввода, устройство визуального ввода, устройство ввода звука или устройство нейрокомпьютерного интерфейса. Например, предоставляемая пользователю обратная связь может являться сенсорной обратной связью любого вида, например, визуальной обратной связью, слуховой обратной связью или тактильной обратной связью; и входные данные от пользователя могут быть приняты в любой форме, включая акустический, речевой, тактильный ввод и мозговые волны. Примеры устройств вывода 416 включают устройства отображения, такие как СД (светодиодный), ЭЛТ (с электронно-лучевой трубкой) или ЖК (жидкокристаллический) экраны, для отображения информации пользователю.
Компьютерная система 400 может быть выполнена с возможностью выполнения этапов способа в соответствии с любым из способов, раскрытых в данном документе, в ответ на выполнение процессорной схемой 402 одной или более последовательностей одной или более команд, содержащихся в схеме памяти 404. Такие команды могут считываться в схему памяти 404 с другого машиночитаемого носителя, такого как устройство хранения данных 406. Выполнение последовательностей команд, содержащихся в схеме основной памяти 404, побуждает процессорную схему 402 выполнять описанные в данном документе этапы способа. Для выполнения последовательностей команд, содержащихся в схеме памяти 404, может также использоваться один или более процессоров в режиме многопроцессорной обработки. В альтернативных аспектах, аппаратно-реализованные схемы могут использоваться вместо или в комбинации с программными командами для реализации различных аспектов настоящего изобретения. Таким образом, аспекты настоящего изобретения не ограничиваются какой-либо конкретной комбинацией схем аппаратного и программного обеспечения.
Фиг. 5 иллюстрирует блок-схему, включающую этапы в способе 500 цифровой обработки сигналов в гидроимпульсной телеметрии, согласно некоторым вариантам реализации изобретения. Некоторые варианты реализации изобретения могут включать этапы в способе 500 в контексте настройки конфигурации бурения в буровой системе, содержащей буровую установку, поддерживающую бурильную колонну, соединенную с бурильным инструментом, создающим подземный ствол скважины (например, буровую систему 100, буровую установку 150, бурильную колонну 133, бурильный инструмент 130 и ствол скважины 120, см. фиг. 1). В буровой системе, акустический преобразователь, расположенный вблизи бурильного инструмента, может передавать сообщения между контроллером на поверхности и бурильным инструментом (например, акустическим преобразователем 102 и контроллером 110, см. Фиг. 1). Сообщения могут передаваться через поток бурового раствора и приниматься на поверхности датчиком давления, при этом поток бурового раствора под давлением подается насосом на поверхности (например, поток бурового раствора 125, датчик давления 101 и насос 105, см. Фиг. 1). Сообщения в способе 500 могут содержать строку символов, имеющих значения в соответствии со способами обработки сигналов, такими как отображение кода Грея. Конкретнее, в некоторых вариантах реализации способа 500 используются схемы ФИМ и ШИМ с отображением кода Грея. В более общем смысле, способы согласно способу 500 могут включать любой протокол цифровой обработки сигналов, используемый в телекоммуникационной отрасли.
Символы в способе 500 могут содержать форму сигнала, имеющую выбранную длину, охватывающую период времени Tsymbol, разделенный на целое число подпериодов или «элементов сигнала», каждый из которых охватывает время Tchip (например, Tsymbol 201 и Tchip 202, см. Фиг. 2). Другие параметры, используемые для описания форм сигналов, определяющих символы в способе 500, включают число битов K используемых символом, время импульса Tpulse и период молчания Tq после каждого импульса (например, Tpulse 211 и Tq 212, см. фиг. 2).
Этапы способов согласно способу 500 могут, по меньшей мере частично, выполняться компьютерной системой, имеющей процессорную схему, выполняющую команды, хранящиеся в схеме памяти (например, компьютерной системой 400, процессорной схемой 402 и схемой памяти 404, см. Фиг. 4). Способы согласно способу 500 могут включать, по меньшей мере один, а не все этапы по фиг. 5, выполняемые в любом порядке. В более общем смысле, способы согласно настоящему изобретению могут включать, по меньшей мере, некоторые из этапов, проиллюстрированные на Фиг. 5, выполнение которых перекрывается во времени. Например, некоторые варианты реализации изобретения могут включать, по меньшей мере, два этапа, проиллюстрированные на Фиг. 5, выполняемые одновременно или почти одновременно.
Этап 502 включает определение символа в последовательности импульсов. В некоторых вариантах реализации изобретения, этап 502 включает определение импульса, за которым следует период молчания. Кроме того, в некоторых вариантах реализации изобретения, этап 502 включает поиск в последовательности импульсов количества элементов сигнала, формирующих символ, причем последовательность импульсов имеет предварительно выбранную конфигурацию. В некоторых вариантах реализации изобретения, этап 502 включает детектирование последовательности импульсов с использованием акустического преобразователя, при этом последовательность импульсов проходит по потоку бурового раствора в стволе скважины. Этап 504 включает определение ширины импульса из импульса в символе. Соответственно, этап 504 может включать подсчет количества последовательных импульсов в пределах периода времени Tsymbol. Этап 506 включает определение начала импульса (Tstart) в символе. В некоторых вариантах реализации изобретения, этап 506 может включать определение ширины импульса (Tpulse) для импульса в символе. Этап 508 включает определение значения символа на основании ширины импульса и начала символа. В некоторых вариантах реализации изобретения, этап 508 включает отображение значения символа в ширину импульса и начало импульса с использованием кода Грея.
Этап 510 включает считывание сообщения, содержащегося в строке символов. В некоторых вариантах реализации изобретения, сообщение может содержать информацию, касающуюся конфигурации бурения в буровой системе. Например, в некоторых вариантах реализации изобретения, информация может содержать газовый фактор (ГФ) пробы нефти в забое ствола скважины. В некоторых вариантах реализации изобретения, информация может содержать характеристику бурового раствора в потоке бурового раствора или характеристику самого потока бурового раствора. Этап 512 включает изменение конфигурации бурения в соответствии с сообщением. В некоторых вариантах реализации изобретения этап 512 может включать направление бурильного инструмента в буровой системе. Например, этап 512 может включать направление бурильного инструмента из вертикальной конфигурации бурения в горизонтальную конфигурацию бурения. Этап 512 также может включать регулирование параметра потока бурового раствора, такого как давление в насосе.
Фиг. 6 иллюстрирует блок-схему, включающую этапы в способе 600 фильтрации интерференции накачки в гидроимпульсной телеметрии, согласно некоторым вариантам реализации изобретения. Способ 600 может выполняться в контексте буровой системы, содержащей буровую установку, поддерживающую бурильную колонну, соединенную с бурильным инструментом, создающим подземный ствол скважины (например, буровой системы 100, буровой установки 150, бурильной колонны 133, бурильного инструмента 130 и ствола скважины 120, см. Фиг. 1). В буровой системе, акустический преобразователь, расположенный вблизи бурильного инструмента, может передавать сообщения между контроллером на поверхности и бурильным инструментом (например, акустическим преобразователем 102 и контроллером 110, см. Фиг. 1). Сообщения могут передаваться через поток бурового раствора и приниматься на поверхности датчиком давления, при этом поток бурового раствора под давлением подается насосом на поверхности (например, поток бурового раствора 125, датчик давления 101 и насос 105, см. Фиг. 1).
Сообщения могут передаваться через поток бурового раствора и приниматься на забое акустическим преобразователем, при этом поток бурового раствора под давлением подается насосом на поверхности (например, поток бурового раствора 125, акустический преобразователь 102 и насос 105, см. Фиг. 1). Сообщения в способе 600 могут содержать строку символов, имеющих значения в соответствии со способами обработки сигналов, такими как отображение кода Грея. Конкретнее, в некоторых вариантах реализации способа 600 используются схемы ФИМ и ШИМ с отображением кода Грея. В более общем смысле, способы согласно способу 600 могут включать любой протокол цифровой обработки сигналов, используемый в телекоммуникационной отрасли.
Символы в способе 600 могут содержать форму сигнала, имеющую выбранную длину, охватывающую период времени Tsymbol, разделенный на целое число подпериодов или «элементов сигнала», каждый из которых охватывает время Tchip (например, Tsymbol 201 и Tchip 202, см. Фиг. 2). Другие параметры, используемые для описания форм сигналов, определяющих символы в способе 500, включают число битов K используемых символом, время импульса Tpulse и период молчания Tq после каждого импульса (например, Tpulse 211 и Tq 212, см. Фиг. 2).
Этапы способов согласно способу 600 могут, по меньшей мере частично, выполняться компьютерной системой, имеющей процессорную схему, выполняющую команды, хранящиеся в схеме памяти (например, компьютерной системой 400, процессорной схемой 402 и схемой памяти 404, см. Фиг. 4). Способы согласно способу 600 могут включать, по меньшей мере, один, а не все этапы, проиллюстрированные на Фиг. 6, выполняемые в любом порядке. В более общем смысле, способы согласно настоящему изобретению могут включать, по меньшей мере, некоторые из этапов, проиллюстрированные на Фиг. 6, выполнение которых перекрывается во времени. Например, некоторые варианты реализации изобретения могут включать, по меньшей мере, два этапа, проиллюстрированные на Фиг. 6, выполняемые одновременно или почти одновременно.
Этап 602 включает определение условия бурения и создание сообщения на основании условия бурения. Например, сообщение может содержать изменение условия бурения на основании, по меньшей мере, одного параметра измерения, полученного путем определения условия бурения. В некоторых вариантах реализации изобретения, этап 602 может включать определение условия бурения, включающего вертикальную конфигурацию бурения, и определение сообщения для направления конфигурации бурения в горизонтальную или почти горизонтальную конфигурацию.
Этап 604 включает создание строки значений символов, содержащей сообщение. В некоторых вариантах реализации изобретения, этап 604 может включать выбор числа K битов в двоичном коде для каждого из символов в сообщении.
Этап 606 включает определение ширины импульса и начала импульса на основании значения символа. В некоторых вариантах реализации изобретения, этап 604 может включать использование отображения кода Грея для установления взаимно-однозначной корреляции между формой сигнала символа и значением символа. Этап 608 включает обеспечение первого импульса в выбранном положении элемента сигнала. Соответственно, этап 608 может включать выбор значения Tstart для импульса в соответствии с комбинированной схемой ФИМ и ШИМ. Этап 610 включает обеспечение последующих импульсов для образования требуемой ширины импульса. Соответственно, этап 610 может включать выбор значения Tpulse в комбинированной схеме ФИМ и ШИМ. Этап 612 включает создание периода молчания Tq в конце ширины импульса. Этап 612 может включать создание Tq, длящегося, по меньшей мере, на протяжении одного элемента сигнала, после последнего импульса в форме сигнала, образующего символ.
Понятно, что различные варианты реализации изобретения в данном описании, относящиеся к компьютерному управлению и искусственным нейронным сетям, включая различные блоки, модули, элементы, компоненты, способы и алгоритмы, могут быть реализованы с использованием компьютерных аппаратных средств, программного обеспечения, их комбинаций и тому подобного. Для иллюстрирования подобной взаимозаменяемости аппаратного и программного обеспечения, различные иллюстративные блоки, модули, элементы, компоненты, способы и алгоритмы были описаны в общем смысле, с точки зрения их функциональности. Реализация такой функциональности в виде аппаратного или программного обеспечения будет зависеть от конкретного применения и любых наложенных конструктивных ограничений. По меньшей мере, по этой причине следует признать, что специалист в данной области техники сможет реализовать описанную функциональность множеством способов для конкретного применения. Кроме того, например, различные компоненты и блоки могут располагаться в другом порядке или по-разному разделяться без отступления от объема конкретно описанных вариантов реализации изобретения.
Компьютерные аппаратные средства, используемые для реализации различных иллюстративных блоков, модулей, элементов, компонентов, способов и алгоритмов, описанных в данном документе, могут содержать процессор, выполненный с возможностью выполнения одной или более последовательностей команд, программных средств или кода, хранящихся на энергонезависимом машиночитаемом носителе. Процессор может представлять собой, например, микропроцессор общего назначения, микроконтроллер, цифровой процессор обработки сигналов, специализированную интегральную схему, программируемую пользователем вентильную матрицу, программируемое логическое устройство, контроллер, конечный автомат, логический вентиль, дискретные аппаратные компоненты, искусственную нейронную сеть или любой другой подобный подходящий объект, который может выполнять вычисления или другие манипуляции с данными. В некоторых вариантах реализации изобретения компьютерные аппаратные средства могут дополнительно содержать такие элементы как, например, память (например, оперативное запоминающее устройство (ОЗУ), флэш-память, постоянное запоминающее устройство (ПЗУ), программируемое постоянное запоминающее устройство (ППЗУ), стираемое постоянное запоминающее устройство (СППЗУ)), регистры, жесткие диски, съемные диски, диски CD-ROM, диски DVD или любое другое подобное подходящее запоминающее устройство или носитель данных.
Исполняемые последовательности, описанные в данном документе, могут быть реализованы с помощью одной или более последовательностей кода, содержащихся в памяти. В некоторых вариантах реализации изобретения такой код может считываться в память из другого машиночитаемого носителя. Выполнение последовательностей команд, содержащихся в памяти, может привести к тому, что процессор будет выполнять описанные в данном документе этапы способа. Для выполнения последовательностей команд в памяти также может использоваться один или более процессоров в режиме многопроцессорной обработки. Также, аппаратно-реализованные схемы могут использоваться вместо или в комбинации с программными командами для осуществления различных вариантов реализации изобретения, описанных в данном документе. Таким образом, варианты реализации настоящего изобретения не ограничиваются какой-либо конкретной комбинацией аппаратного и/или программного обеспечения.
В контексте настоящего изобретения, машиночитаемый носитель будет относиться к любому носителю данных, который прямо или косвенно предоставляет процессору команды для выполнения. Машиночитаемый носитель может принимать различные формы, включая, например, энергонезависимые носители, энергозависимые носители, а также средства передачи данных. Энергонезависимые носители среды могут включать, например, оптические и магнитные диски. Энергозависимые носители могут включать, например, динамическую память. Средства передачи данных могут включать, например, коаксиальные кабели, провода, волоконную оптику и провода, которые образуют шину. Обычные формы машиночитаемых носителей могут включать, например, дискеты, гибкие диски, жесткие диски, магнитные ленты, другие подобные магнитные носители, диски CD-ROM, диски DVD, другие подобные оптические носители, перфокарты, бумажные перфоленты и подобные физические носители с перфорацией, ОЗУ, ПЗУ, ППЗУ, СППЗУ и флэш-СППЗУ.
Раскрытые в данном документе варианты реализации изобретения включают:
A. Способ, включающий отображение символа в последовательности импульсов с использованием ширины импульса и начала импульса в символе, считывание сообщения с использованием значения символа для каждого символа в строке символов и изменение конфигурации бурения в соответствии с сообщением.
B. Устройство, содержащее схему памяти, хранящую команды, процессорную схему, выполненную с возможностью выполнения команд и побуждающую устройство: определять символ в последовательности импульсов, связывать символ со значением символа, используя взаимно-однозначное соответствие между значением символа и характеристикой символа, считывать сообщение, используя значение символа для каждого символа в строке символов, и изменять конфигурацию бурения в соответствии с сообщением.
C. Способ, включающий определение условия бурения и создание сообщения на основании условия бурения, создание строки значений символов, содержащей сообщение, определение ширины импульса и начала импульса для импульса на основании значения символа, обеспечение первого импульса в выбранном положении элемента сигнала, обеспечение последующих импульсов для образования ширины импульса и создание периода молчания в конце ширины импульса.
Каждый из вариантов реализации изобретения A, B и C может иметь один или более следующих дополнительных элементов в любой комбинации: Элемент 1, в котором отображение символа включает отображение последовательных символов кода Грея в две последовательности импульсов, отличающиеся друг от друга на один элемент сигнала, при этом каждый символ содержит предварительно определенное количество элементов сигнала. Элемент 2: в котором отображение символа в последовательности импульсов включает определение формы сигнала, имеющей выбранное количество элементов сигнала, и определение импульса и периода молчания в пределах формы сигнала. Элемент 3: в котором отображение символа в последовательности импульсов включает определение сигнала давления бурового раствора в акустическом преобразователе. Элемент 4: в котором изменение конфигурации бурения в соответствии с сообщением включает изменение работы бурового насоса. Элемент 5: в котором изменение конфигурации бурения в соответствии с сообщением включает направление бурильного инструмента из вертикальной конфигурации бурения в горизонтальную конфигурацию бурения.
Элемент 6: в котором процессор дополнительно выполняет команды, чтобы побудить устройство принимать акустический сигнал от акустического преобразователя. Элемент 7: в котором характеристика символа содержит одно из ширины импульса и начала импульса. Элемент 8: в котором взаимно-однозначное соответствие содержит отображение кода Грея. Элемент 9: в котором определение символа в последовательности импульсов включает определение множества элементов сигнала, расположенных в предварительно выбранной кодовой комбинации. Элемент 10: в котором конфигурация бурения включает, по меньшей мере, одну из вертикальной конфигурации или горизонтальной конфигурации.
Элемент 11: в котором обеспечение первого импульса в выбранном положении элемента сигнала включает обеспечение сигнала давления для акустического преобразователя в стволе скважины буровой системы. Элемент 12: в котором обеспечение последующих импульсов для образования ширины импульса включает обеспечение для ширины импульса значения импульсов больше минимального. Элемент 13: в котором создание периода молчания в конце ширины импульса включает создание периода молчания из одного или более элементов сигнала после импульса. Элемент 14: дополнительно включающий выбор положения элемента сигнала и требуемой ширины импульса в соответствии, по меньшей мере, с одной из схем фазово-импульсной модуляции (ФИМ) и широтно-импульсной модуляции (ШИМ). Элемент 15: в котором определение ширины импульса и начала импульса для импульса включает выбор значения импульса из числа значений в двоичном коде, имеющем выбранное число битов. Элемент 16: в котором определение ширины импульса и начала импульса на основании значения символа включает сопоставление значения символа с шириной импульса и началом импульса с использованием отображения кода Грея. Элемент 17: в котором создание сообщения на основании условия бурения включает направление бурильного инструмента из вертикальной конфигурации в горизонтальную конфигурацию.
Типовые варианты реализации изобретения, описанные в данном документе, хорошо подходят для достижения указанных, а также присущих им целей и преимуществ. Конкретные варианты реализации изобретения, описанные выше, являются только иллюстративными, так как типовые варианты реализации изобретения могут быть модифицированы и реализованы различными, но эквивалентными способами, очевидными специалисту в данной области техники благодаря идеям, изложенным в данном документе. Кроме того, для деталей конструкции или схемы, проиллюстрированных в настоящем документе, не предусмотрены никакие ограничения, кроме раскрытых в приведенных ниже пунктах формулы изобретения. Поэтому очевидно, что конкретные иллюстративные варианты реализации изобретения, описанные выше, могут быть изменены, комбинированы или модифицированы, и считается, что все такие вариации находятся в рамках объема и сущности данного изобретения. Изобретение, иллюстративно описанное в данном документе, может соответствующим образом применяться на практике при отсутствии любого элемента, который конкретно не описан в данном документе, и/или любого необязательного элемента, описанного в данном документе. Несмотря на то, что композиции и способы описаны в терминах «содержащие» или «включающие» различные компоненты или этапы, композиции и способы также могут «по существу состоять из» или «состоять из» различных компонентов и этапов. Все числа и диапазоны, описанные выше, могут изменяться на некоторую величину. Всякий раз, когда указывается числовой диапазон с нижним пределом и верхним пределом, любое число и любой включенный диапазон, попадающий в пределы диапазона, указывается конкретно. В частности, каждый диапазон значений (в виде «от около а до около b», или, равносильно, «от примерно а до примерно b», или, равносильно, «от примерно a-b»), описанный в данном документе, следует понимать как определяющий каждое число и диапазон, входящие в широкий диапазон значений. Кроме того, термины в формуле изобретения имеют свое простое, обычное значение, если иное явно и четко не определено патентообладателем. Кроме того, применяемая в формуле изобретения форма единственного числа предполагает наличие одного или большего количества выражаемых в ней элементов. При наличии противоречий в применении слова или термина в настоящем описании и одном или большем количестве патентов или других документов, которые могут быть включены в настоящее описание посредством ссылки, следует принимать определения, соответствующие настоящему описанию.
В контексте настоящего изобретения, выражение «по меньшей мере один из», предшествующее последовательности наименований, со словами «и» или «или» для отделения любого из этих наименований, изменяет перечисление в целом, а не каждый элемент перечисления (т. е. каждое наименование). Выражение «по меньшей мере один из» не требует выбора по меньшей мере одного наименования; наоборот, это выражение допускает значение, включающее по меньшей мере одно из любого наименования, и/или по меньшей мере одно из наименований в любой комбинации наименований, и/или по меньшей мере одно из каждого наименования. Для примера: каждое из выражений «по меньшей мере один из A, B и C» или «по меньшей мере один из A, B или C» относится только к A, только к B или только к C; к любой комбинации A, B и C; и/или по меньшей мере к одному из A, B и C.

Изобретение относится к телеметрии, используемой при разведке и добыче нефти и газа. Техническим результатом является увеличение скорости передачи данных гидроимпульсной телеметрии, а также уменьшение коэффициента битовых ошибок в приемнике. В частности, предложен способ обработки сигнала в гидроимпульсной телеметрии, включающий: обработку принятого акустического сигнала, содержащего множество форм сигналов, при этом каждая из множества форм сигналов соответствует представлению последовательности импульсов, охватывающему период времени, который разделен на целое число положений элемента сигнала; выбор одной или более из множества форм сигналов, отличающихся не более чем одним положением элемента сигнала относительно соседней формы сигнала из множества форм сигналов; отображение каждой из выбранной одной или более из множества форм сигналов в значение символа на основании ширины импульса и начала импульса соответствующего представления последовательности импульсов; считывание сообщения с использованием значения символа для каждого символа в строке символов; и изменение конфигурации бурения в соответствии с сообщением. Раскрыто также устройство для реализации указанного способа. 3 н. и 17 з.п. ф-лы, 6 ил., 2 табл.
1. Способ обработки сигнала в гидроимпульсной телеметрии, включающий:
обработку принятого акустического сигнала, содержащего множество форм сигналов, при этом каждая из множества форм сигналов соответствует представлению последовательности импульсов, охватывающему период времени, который разделен на целое число положений элемента сигнала;
выбор одной или более из множества форм сигналов, отличающихся не более чем одним положением элемента сигнала относительно соседней формы сигнала из множества форм сигналов;
отображение каждой из выбранной одной или более из множества форм сигналов в значение символа на основании ширины импульса и начала импульса соответствующего представления последовательности импульсов;
считывание сообщения с использованием значения символа для каждого символа в строке символов; и
изменение конфигурации бурения в соответствии с сообщением.
2. Способ по п. 1, отличающийся тем, что отображение каждой из выбранной одной или более из множества форм сигналов в значение символа включает отображение последовательных символов кода Грея в два представления последовательности импульсов, отличающихся друг от друга на одно положение элемента сигнала, при этом каждый из последовательных символов кода Грея содержит предварительно определенное количество положений элементов сигнала.
3. Способ по п. 1, отличающийся тем, что отображение каждой из выбранной одной или более из множества форм сигналов в значение символа включает определение по меньшей мере одной из множества форм сигналов, имеющей выбранное количество положений элементов сигнала, и определение импульса и периода молчания в пределах указанной по меньшей мере одной из множества форм сигналов.
4. Способ по п. 1, отличающийся тем, что дополнительно включает определение сигнала давления бурового раствора в акустическом преобразователе.
5. Способ по п. 1, отличающийся тем, что изменение конфигурации бурения в соответствии с сообщением включает изменение работы бурового насоса.
6. Способ по п. 1, отличающийся тем, что изменение конфигурации бурения в соответствии с сообщением включает направление бурильного инструмента из вертикальной конфигурации бурения в горизонтальную конфигурацию бурения.
7. Устройство для обработки сигнала в гидроимпульсной телеметрии, содержащее:
схему памяти, хранящую команды;
процессорную схему, выполненную с возможностью выполнения команд и побуждающую устройство:
обрабатывать принятый акустический сигнал, содержащий множество форм сигналов, при этом каждая из множества форм сигналов соответствует представлению последовательности импульсов, охватывающему период времени, который разделен на целое число положений элемента сигнала;
выбирать одну или более из множества форм сигналов, отличающихся не более чем одним положением элемента сигнала относительно соседней формы сигнала из множества форм сигналов;
связывать каждую из выбранных одну или более из множества форм сигналов со значением символа, используя взаимно-однозначное соответствие между значением символа и характеристикой символа;
считывать сообщение с использованием значения символа для каждого символа в строке символов; и
изменять конфигурацию бурения в соответствии с сообщением.
8. Устройство по п. 7, в котором процессор дополнительно выполняет команды, чтобы побудить устройство принимать акустический сигнал от акустического преобразователя.
9. Устройство по п. 7, отличающееся тем, что характеристика символа содержит одно из ширины импульса и начала импульса.
10. Устройство по п. 7, отличающееся тем, что взаимно-однозначное соответствие содержит отображение кода Грея.
11. Устройство по п. 7, в котором процессор дополнительно выполняет команды, чтобы побудить устройство определять целое число положений элементов сигнала, расположенных в предварительно выбранной кодовой комбинации.
12. Устройство по п. 7, отличающееся тем, что конфигурация бурения включает по меньшей мере одну из вертикальной конфигурации или горизонтальной конфигурации.
13. Способ обработки сигнала в гидроимпульсной телеметрии, включающий:
определение условия бурения;
создание сообщения на основании условия бурения;
создание строки значений символов, содержащей сообщение;
для каждого значения символа в строке значений символов:
определение ширины импульса и положения начала импульса для представления последовательности импульсов значения символа, при этом представление последовательности импульсов охватывает период времени, который разделен на целое число положений элемента сигнала;
обеспечение первого импульса представления последовательности импульсов в одном из положений элемента сигнала, которое соответствует положению начала импульса;
обеспечение одного или более дополнительных импульсов, следующих за первым импульсом, для образования ширины импульса; и
создание периода молчания в конце ширины импульса,
при этом строка значений символов соответствует множеству представлений последовательности импульсов, где каждое представление последовательности импульсов отличается не более чем одним положением элемента сигнала относительно соседнего представления последовательности импульсов из множества представлений последовательности импульсов.
14. Способ по п. 13, отличающийся тем, что дополнительно включает обеспечение сигнала давления для акустического преобразователя в стволе скважины буровой системы.
15. Способ по п. 13, отличающийся тем, что обеспечение одного или более дополнительных импульсов, следующих за первым импульсом, включает обеспечение для ширины импульса значения импульсов больше минимального.
16. Способ по п. 13, отличающийся тем, что создание периода молчания в конце ширины импульса включает формирование периода молчания, охватывающего более одного положения элементов сигнала после представления последовательности импульсов.
17. Способ по п. 13, дополнительно включающий выбор одного из положений элемента сигнала и ширины импульса в соответствии по меньшей мере с одной из схем фазово-импульсной модуляции (ФИМ) и широтно-импульсной модуляции (ШИМ).
18. Способ по п. 13, отличающийся тем, что определение ширины импульса и положения начала импульса для представления последовательности импульсов включает выбор значения импульса из числа значений в двоичном коде, имеющем выбранное число битов.
19. Способ по п. 13, отличающийся тем, что определение ширины импульса и положения начала импульса включает сопоставление значения символа с шириной импульса и положением начала импульса с использованием отображения кода Грея.
20. Способ по п. 13, отличающийся тем, что дополнительно включает изменение конфигурации бурения из вертикальной конфигурации в горизонтальную конфигурацию на основании сообщения.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Устройство для очистки мандарин и тому подобных плодов от кожуры | 1950 |
|
SU92272A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

