УРОВЕНЬ ТЕХНИКИ
[0001] В сфере разведки и добычи нефти и газа для считывания данных, полученных с помощью акустических преобразователей в скважине, обычно используют датчики давления на поверхности. Данные передаются по стволу скважины через буровой раствор, обычно в виде коротких импульсов, в виде сигнала двоичного кода. Одним из наиболее серьезных источников помех при гидроимпульсной телеметрии является возмущение, образуемое во время работы насосов, перекачивающих буровой раствор. Было предпринято множество попыток для снижения или устранения помех, вызванных работой бурового насоса. Например, некоторые подходы включают использование двух или более датчиков, с известным временем задержки между ними. Другие подходы включают алгоритмы усреднения в сочетании с использованием датчиков хода насоса для идентификации характеристики помех, обусловленных работой бурового насоса. Некоторые из этих способов основаны на допущениях, таких, что форма помех, обусловленных работой бурового насоса, для разных датчиков является одинаковой или подобной. В других способах выходные сигналы двух датчиков используют для расчета передаточной функции между датчиками и, на основании этого, принятого сигнала. Однако использование данных подходов затруднено из-за небольшой разницы, обычно возникающей между сигналами двух или более датчиков по сравнению с амплитудой помех, обусловленных работой бурового насоса, даже в случае, когда они расположены на значительном расстоянии друг от друга.
[0002] Во многих случаях для сбора исходных данных и разработки сложных математических моделей, необходимых для подавления помех, требуется остановить работу бурового насоса и бурение. Некоторые используемые математические модели включают подавление гармоник помех, обусловленных работой бурового насоса, используя быстрое преобразование Фурье (БПФ) для формирования опорного сигнала, представляющего циклы насоса. Более сложные вычисления для поиска внутриполосных гармоник и формирования опорного сигнала включают интерполяцию внеполосных частотных составляющих помех, обусловленных работой бурового насоса. В некоторых подходах для формирования всеполюсной модели помех, обусловленных работой бурового насоса, используют линейное прогнозирование, в котором для оценки помех, обусловленных работой бурового насоса, используют запаздывающий вариант принятого сигнала. В дальнейших подходах для точного расчета передаточной функции между установленными датчиками через систему передают известную последовательность импульсов, по меньшей мере дважды (в обоих направлениях).
[0003] В большинстве систем в качестве гасителей пульсаций насоса используют большие «акустические» конденсаторы. Данные устройства функционируют как большие баллоны, выполненные из упругого материала, расширяемые под действием бурового раствора, тем самым, акустически изолируя датчик давления от шума насосов. Тем не менее, в случае, когда акустический преобразователь расположен глубоко в стволе скважины, «акустические» конденсаторы не могут обеспечить требуемый уровень затухания помех. В целом, при моделировании помех, обусловленных работой бурового насоса, при существующем уровне техники не учитывают передачу данных от источников шума, таких как буровое долото в стволе скважины. Кроме того, с точки зрения измерительной аппаратуры, вышеописанные способы являются трудоемкими и дорогостоящими, поскольку в них используется множество акустических преобразователей и чувствительное детекторное оборудование.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0004] Нижеследующие графические материалы приводятся для иллюстрации некоторых аспектов данного изобретения и их не следует рассматривать в качестве ограничивающих вариантов реализации. В отношении описываемого объекта изобретения может быть предложено множество модификаций, изменений, комбинаций и эквивалентов по форме и функционированию без отступления от объема данного изобретения.
[0005] На Фиг. 1 проиллюстрирована буровая система, содержащая датчик давления, выполненная с возможностью фильтрации помех, обусловленных работой бурового насоса, при гидроимпульсной телеметрии, в соответствии с некоторыми вариантами реализации изобретения.
[0006] На Фиг. 2 проиллюстрирован сигнал давления и сигнал датчика хода насоса в соответствии с некоторыми вариантами реализации изобретения.
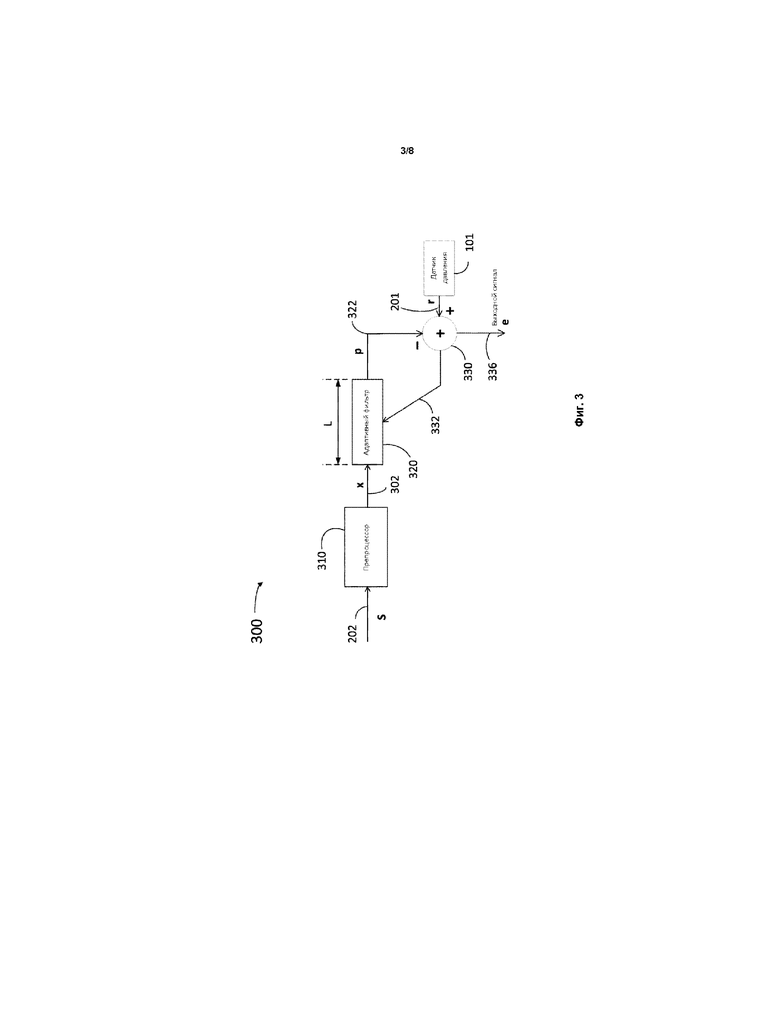
[0007] На Фиг. 3 проиллюстрирована функциональная схема фильтра помех, обусловленных работой бурового насоса, выполненного с возможностью устранения помех, обусловленных работой бурового насоса, при гидроимпульсной телеметрии в соответствии с некоторыми вариантами реализации изобретения.
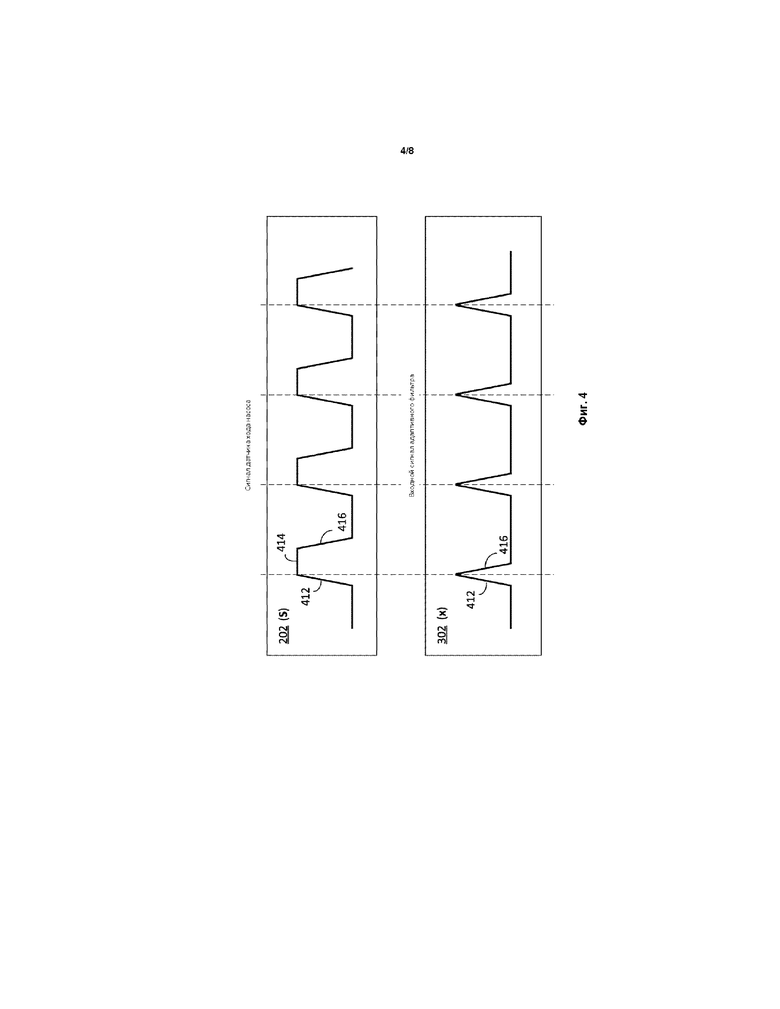
[0008] На Фиг. 4 проиллюстрирован сигнал датчика хода насоса и входной сигнал адаптивного фильтра в соответствии с некоторыми вариантами реализации изобретения.
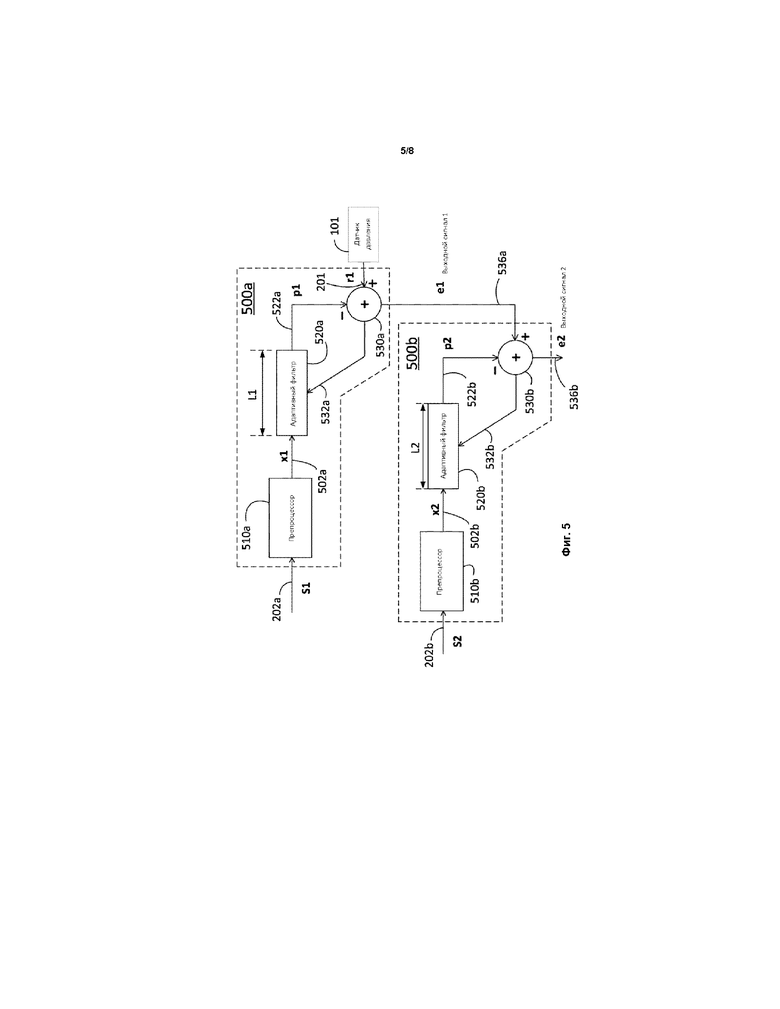
[0009] На Фиг. 5 проиллюстрирована функциональная схема каскадно включенных фильтров помех, обусловленных работой бурового насоса, выполненных с возможностью устранения помех, обусловленных работой бурового насоса, при гидроимпульсной телеметрии в соответствии с некоторыми вариантами реализации изобретения.
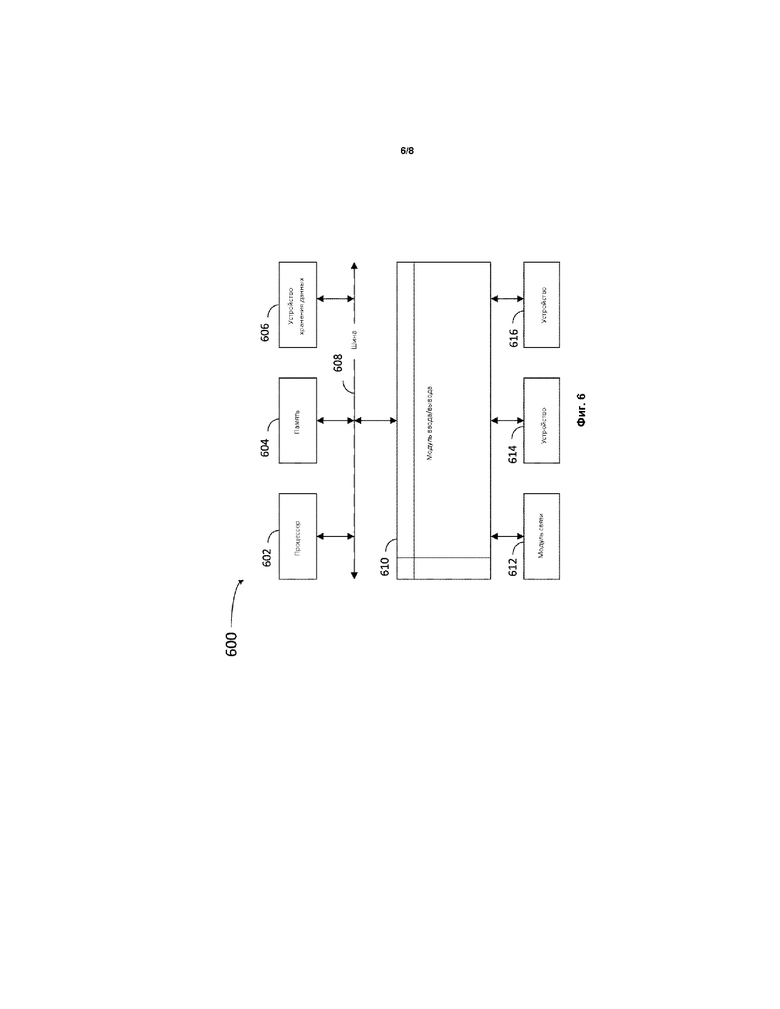
[0010] На Фиг. 6 проиллюстрирована компьютерная система, выполненная с возможностью фильтрации помех, обусловленных работой бурового насоса, при гидроимпульсной телеметрии в соответствии с некоторыми вариантами реализации изобретения.
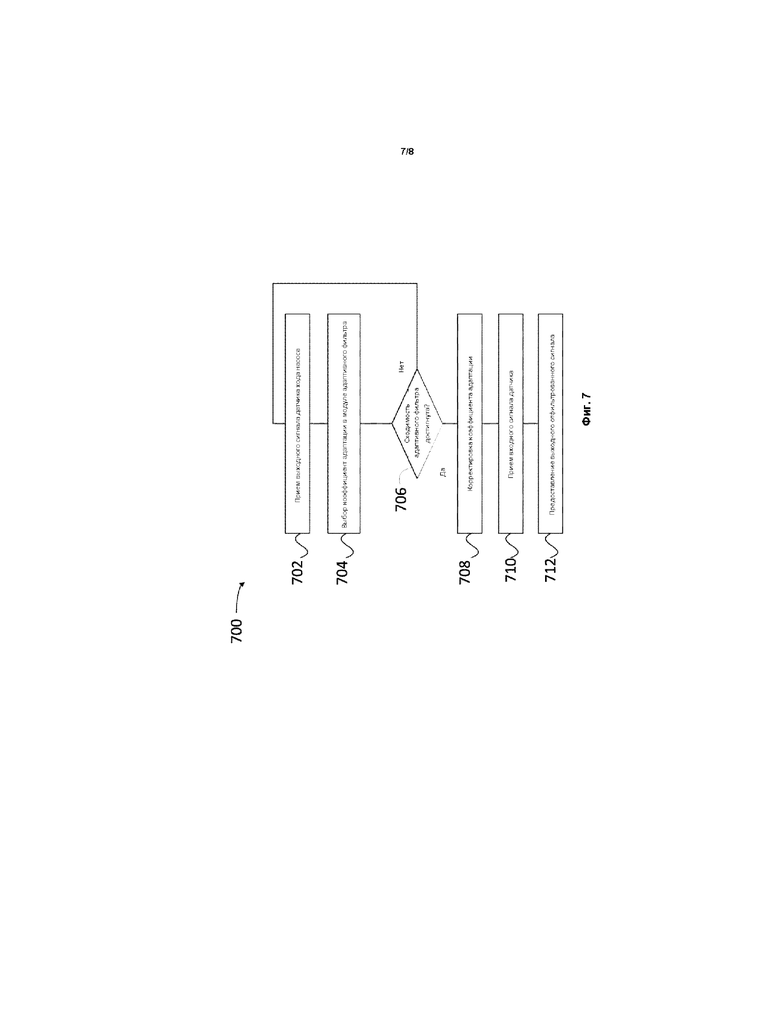
[0011] На Фиг. 7 проиллюстрирована блок-схема, включающая этапы способа фильтрации помех, обусловленных работой бурового насоса, при гидроимпульсной телеметрии в соответствии с некоторыми вариантами реализации изобретения.
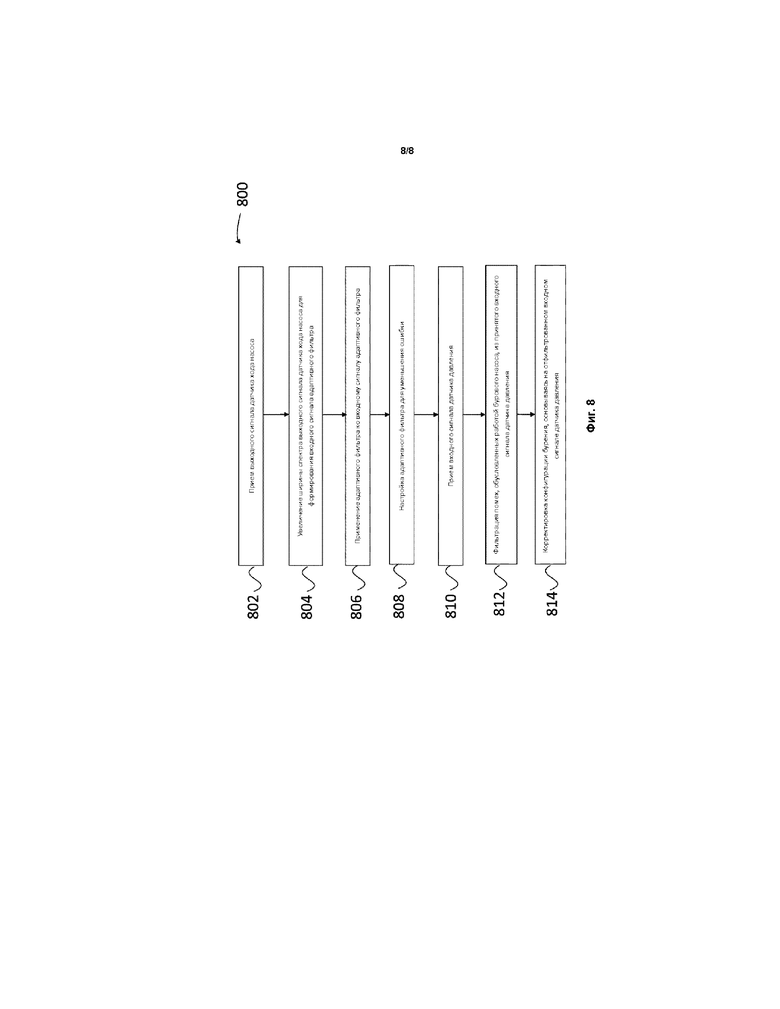
[0012] На Фиг. 8 проиллюстрирована блок-схема, включающая этапы способа фильтрации помех, обусловленных работой бурового насоса, при гидроимпульсной телеметрии в соответствии с некоторыми вариантами реализации изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0013] Данное изобретение относится к способам и устройствам для систем телеметрии, используемым при разведке и добыче нефти и газа, а более конкретно, к способам и устройствам для фильтрации помех, обусловленных работой бурового насоса, при телеметрии с использованием модуляции гидроимпульсов. В соответствии с данным изобретением в вариантах реализации осуществляют фильтрацию помех, обусловленных работой бурового насоса, принимаемых от одного датчика. Более того, описанные в данной заявке варианты реализации изобретения позволяют избежать передачи специальных последовательностей данных для фильтрации помех, обусловленных работой бурового насоса, тем самым уменьшая время ожидания системы обработки данных. Кроме того, описанные в данной заявке варианты реализации изобретения позволяют избежать необходимости остановки насоса или использования сигнала для измерения передаточных функций и других сложных математических формул, используемых в сложных схемах фильтрации.
[0014] Таким образом, в соответствии с данным изобретением в вариантах реализации для генерации эталонных помех для адаптивных фильтров используют сигнал от датчиков хода насоса, как описано в данной заявке. Некоторые варианты реализации содержат модуль препроцессора, выполненный с возможностью обнаружения передних фронтов выходного сигнала датчика хода насоса. Это помогает восстановить большинство из гармоник помех, обусловленных работой бурового насоса. В соответствии с данным изобретением в вариантах реализации используют и отслеживают в реальном масштабе времени изменение частоты работы насоса. В некоторых вариантах реализации адаптивный фильтр является фильтром, реализованным на основе алгоритмов аффинных проекций. Адаптивные фильтры на основе алгоритмов аффинных проекций, как правило, имеют большую скорость сходимости и меньший остаточный шум, по сравнению с фильтрами, реализованными на основе метода наименьших квадратов (МНК), а также являются более стабильным, по сравнению с фильтрами, реализованными на основе рекурсивного метода наименьших квадратов (РМНК).
[0015] В соответствии с данным изобретением варианты реализации включают адаптивный фильтр для удаления помех, обусловленных работой бурового насоса, из сигнала, генерируемого акустическим преобразователем, входящим в состав системы гидроимпульсной телеметрии (ГИТ). В некоторых вариантах реализации системы ГИТ в буровой системе в качестве среды для передачи информации от компоновки низа бурильной колонны (КНБК) на поверхность используют поток бурового раствора. Буровой раствор нагнетается посредством одного или более насосов высокого давления через бурильную колонну и возвращается на поверхность через пространство между бурильной трубой и обсадной трубой скважины. Для передачи импульсов с помощью бурового раствора используют акустический преобразователь в КНБК. Данные импульсы добавляют к сигналу помехи, формируемые буровым насосом, и принимают с помощью датчика давления на поверхности. В некоторых вариантах реализации изобретения работа насоса является периодической, таким образом, помехи, обусловленные работой бурового насоса, являются периодическим колебательным сигналом (например, синусоидальным колебанием). Акустический преобразователь может быть расположен на значительном удалении от датчика давления, обычно на расстоянии в диапазоне от нескольких сотен метров (нескольких тысяч футов) и до 9144 метров (тридцати тысяч футов). С другой стороны, насосы располагают намного ближе к датчику давления. Соответственно, акустический преобразователь сигнала может быть расположен значительно ниже источника помех, обусловленных работой бурового насоса. Это может привести к слишком низкому значению отношения сигнал/шум (ОСШ) и будет препятствовать обнаружению сигнала от акустического преобразователя. Кроме того, во многих случаях в буровой системе используют несколько насосов, каждый из которых работает на незначительно отличающихся частотах, тем самым формируя комбинированный сигнал помехи, который может содержать множество частотных составляющих. Кроме того, сигналы помехи от нескольких насосов могут иметь некогерентные фазы относительно друг друга, делая процесс их фильтрации более затруднительным.
[0016] Представлены системы и способы для фильтрации помех, обусловленных работой бурового насоса, при гидроимпульсной телеметрии. В одном варианте реализации изобретения способ включает: прием выходного сигнала датчика хода насоса, выбор коэффициента адаптации в модуле адаптивного фильтра и корректировку коэффициента адаптации, когда модуль адаптивного фильтра достигает сходимости. Способ может дополнительно включать: прием входного сигнала датчика, подачу выходного отфильтрованного сигнала и, основываясь на выходном сигнале, изменение конфигурации бурового инструмента.
[0017] В соответствии с некоторыми вариантами реализации изобретения устройство содержит схему памяти, выполненную с возможностью хранения команд, и схему процессора, выполненную с возможностью выполнения команд. При выполнении команд схемой процессора это вызывает выполнение устройством: прием выходного сигнала датчика хода насоса, выбор коэффициента адаптации в модуле адаптивного фильтра, корректировку коэффициента адаптации, когда модуль адаптивного фильтра достигает сходимости, и прием входного сигнала датчика. Также в соответствии с некоторыми вариантами реализации изобретения устройство выполнено с возможностью подачи на выход отфильтрованного сигнала и изменения конфигурации бурового инструмента, основываясь на выходном отфильтрованном сигнале.
[0018] Способ в соответствии с описанными в данной заявке вариантами реализации может включать: прием сигнала датчика хода насоса, увеличение ширины спектра сигнала датчика хода насоса для формирования входного сигнала адаптивного фильтра и применение адаптивного фильтра ко входному сигналу адаптивного фильтра. Некоторые варианты реализации дополнительно включают: настройку адаптивного фильтра для уменьшения ошибки, прием входного сигнала датчика давления, фильтрацию помех, обусловленных работой бурового насоса, из принятого входного сигнала датчика давления и, основываясь на отфильтрованном сигнале давления, настройку конфигурации бурения.
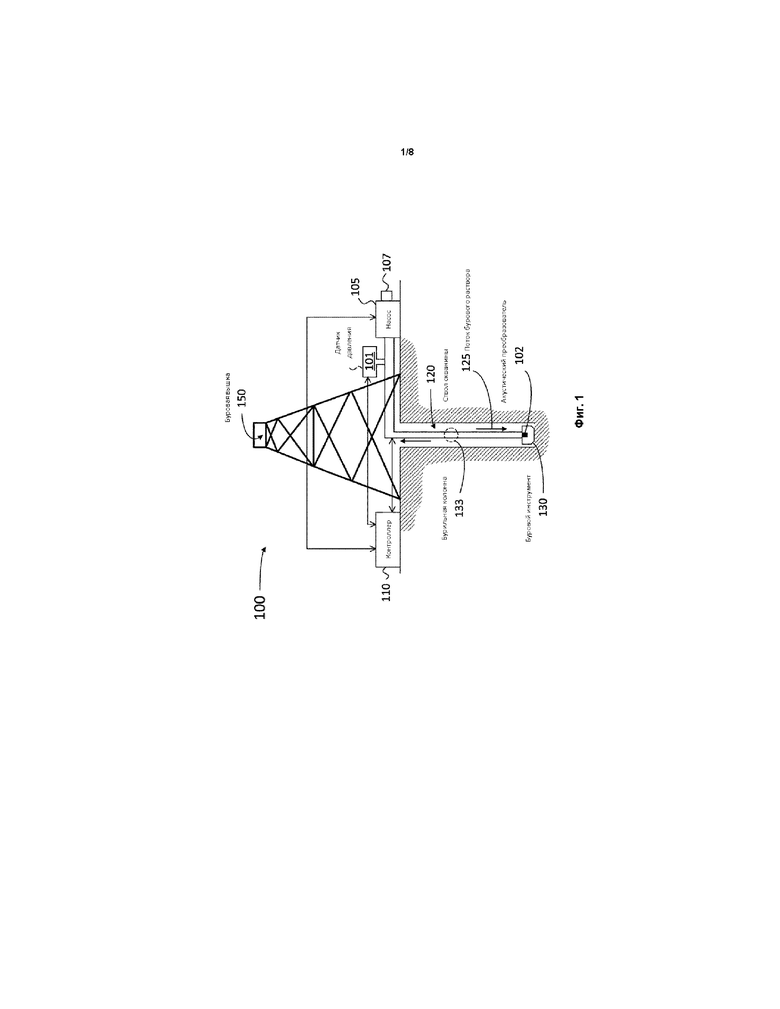
[0019] На Фиг. 1 проиллюстрирована буровая система 100, в которой используют датчик давления 101, выполненный с возможностью подавления отражений импульсов в схеме телеметрии с импульсной модуляцией в соответствии с некоторыми вариантами реализации изобретения. Буровая система 100 может быть распространенной в нефтяной и газовой промышленности системой каротажа в процессе бурения (КПБ). Насос 105 направляет поток бурового раствора 125 вниз по стволу скважины 120, пробуренному буровым инструментом 130. Посредством бурильной колонны 133 буровой инструмент 130 соединен с оборудованием на поверхности, таким как насос 105 и датчик давления 101. Инструменты поддерживаются посредством буровой установки 150. Контроллер 110 соединен с датчиком давления 101, насосом 105 и через ствол скважины 120 с акустическим преобразователем 102. Контроллер 110 может содержать компьютерную систему, выполненную с возможностью приема данных и передачи команд датчику давления 101, акустическому преобразователю 102 и насосу 105.
[0020] Установленный возле бурового инструмента 130 акустический преобразователь 102 выполнен с возможностью передачи сообщений, содержащих информацию, относящуюся к процессу бурения, на поверхность. Сообщения, формируемые акустическим преобразователем 102, могут быть закодированными цифровыми последовательностями акустических импульсов, передаваемыми посредством потока бурового раствора 125 и считываемыми датчиком импульсов 101. Соответственно, для передачи сообщений между акустическим преобразователем 102 и датчиком давления 101 может использоваться множество видов модуляции цифрового сигнала, таких как фазово-импульсная модуляция (ФИМ) и широтно-импульсная модуляция (ШИМ). В ответ на сообщения, передаваемые между датчиком давления 101 и акустическим преобразователем 102, контроллер 110 может корректировать конфигурацию бурения в буровой системе 100. Например, основываясь на сообщениях, принятых от акустического преобразователя 102, с помощью контроллера 110 скорость бурения может быть увеличена, уменьшена или процесс бурения может быть остановлен. Кроме того, в некоторых вариантах реализации контроллер 110 выполнен с возможностью инициирования отклонения бурового инструмента 130 в другом направлении бурения. Например, в некоторых вариантах реализации буровой инструмент 130 может быть отклонен из вертикальной конфигурации бурения (как проиллюстрировано на Фиг. 1) в горизонтальную или почти горизонтальную конфигурацию бурения. В некоторых вариантах реализации корректировка конфигурации бурения может включать регулирование потока бурового раствора 125. Например, поток бурового раствора 125 может быть увеличен или уменьшен, или может быть увеличено или уменьшено давление, создаваемое насосом 105. Кроме того, в некоторых вариантах реализации корректировка конфигурации бурения может включать добавление в поток бурового раствора 125 химических веществ и других добавок, или удаление примесей из потока бурового раствора 125.
[0021] Датчик хода насоса 107, выполнен с возможностью установки на насос 105 и передачи сигнала, связанного с вращением оси насоса. В некоторых вариантах реализации датчик хода насоса 107 содержит датчик, функционирующий как контактный выключатель, контакты которого замыкаются в течение каждого поворота оси насоса на определенный угол.
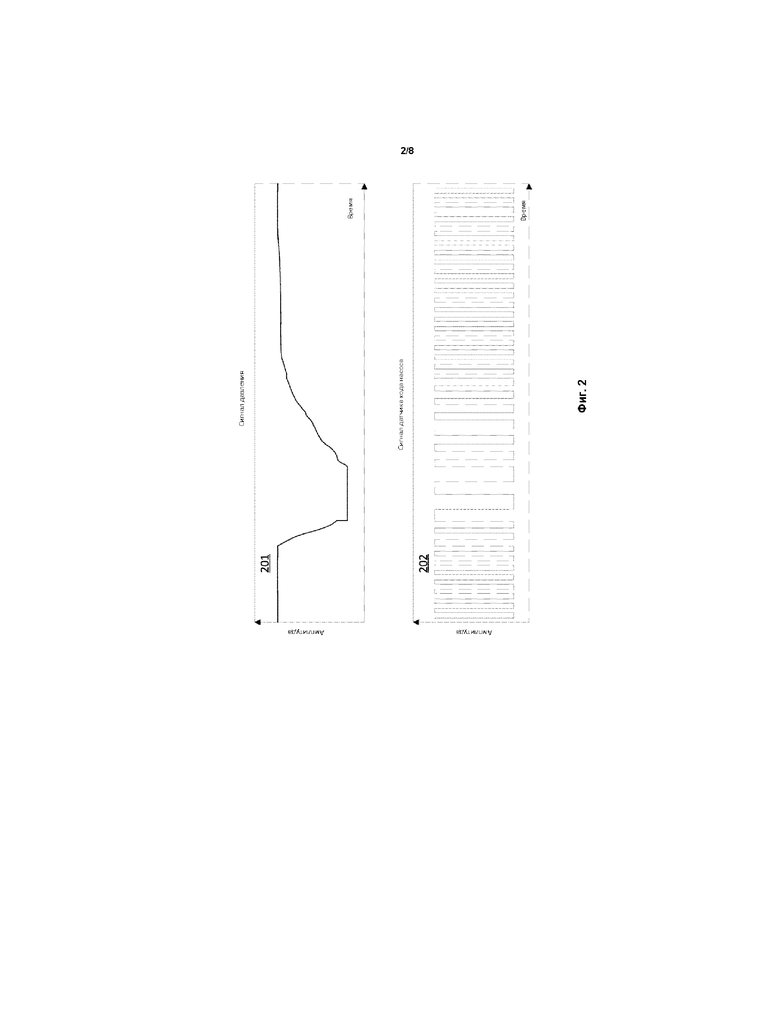
[0022] На Фиг. 2 проиллюстрирован сигнал давления 201 и сигнал датчика хода насоса 202 в соответствии с некоторыми вариантами реализации изобретения. На Фиг. 2 осью абсцисс представлено время (в условных единицах), а осью ординат представлена амплитуда сигнала (в условных единицах). Сигнал давления 201 контролируется посредством датчика давления 101 (см. Фиг. 1). В случае, когда скорость вращения насоса 105 уменьшается, общее давление потока бурового раствора 125 падает и поднимается снова, когда скорость вращения насоса 105 достигает исходного значения. В вариантах реализации данного изобретения представлен фильтр помех, обусловленных работой бурового насоса, для приема сигнала от акустического преобразователя 102, устойчивого к перепадам давления, как проиллюстрировано с помощью сигнала давления 201. При работе насоса 105 с постоянной скоростью сигнал датчика хода насоса 202 является прямоугольным импульсом с постоянным периодом и заданной скважностью. При изменении скорости вращения насоса 105, когда давление падает, частота импульсов в сигнале датчика хода насоса 202 меняется, как проиллюстрировано на Фиг. 2. В некоторых вариантах реализации при изменении скорости вращения оси насоса 105 скважность сигнала датчика хода насоса 202 остается неизменной.
[0023] На Фиг. 3 проиллюстрирована функциональная схема фильтра помех 300, обусловленных работой бурового насоса, выполненного с возможностью устранения помех, обусловленных работой бурового насоса, при гидроимпульсной телеметрии в соответствии с некоторыми вариантами реализации изобретения. Модуль препроцессора 310 выполнен с возможностью приема и преобразования сигнала датчика хода насоса 202 (S) во входной сигнал адаптивного фильтра 302 (x). Модуль адаптивного фильтра 320 выполнен с возможностью формирования опорного сигнала 322 (p) из входного сигнала адаптивного фильтра 302. Модуль сумматора 330 выполнен с возможностью приема сигнала давления 201 (r) от датчика давления 101 и формирования выходного сигнала 336 (e) путем вычитания опорного сигнала 322 (p) из сигнала датчика давления 201 (r). Сигнал давления 201 может быть таким, как подробно описано выше со ссылкой на Фиг. 2. В вариантах реализации в соответствии с данным изобретением, модуль адаптивного фильтра 320 выполнен с возможностью уменьшение функции стоимости посредством использования входного сигнала обратной связи 332. Функция стоимости может быть определена в зависимости от сигнала давления 201 и входного сигнала обратной связи 332. В свою очередь, входной сигнал обратной связи 332 определяют с помощью выходного сигнала 336, корректируемого с помощью коэффициента адаптации μ. В некоторых вариантах реализации входной сигнал обратной связи 332 является таким же как выходной сигнал 336, а коэффициент адаптации μ применяется ко входному сигналу обратной связи 332 в адаптивном фильтре 320. В одном варианте реализации изобретения модуль адаптивного фильтра 320 является фильтром с линейной конечной импульсной характеристикой (КИХ), а функция стоимости является среднеквадратичной ошибкой (СКО) разности сигнала давления 201 и выходного сигнала адаптивного фильтра 322.
[0024] В некоторых вариантах реализации скорость сходимости модуля адаптивного фильтра 320 к требуемому решению является более высокой в случае, когда входной сигнал (x) является случайным сигналом с большой шириной спектра. В вариантах реализации, когда входной сигнал является периодическим, или практически периодическим сигналом, как в случае входного сигнала 302 (x) адаптивного фильтра, уменьшенная ширина спектра может привести к меньшей скорости сходимости модуля адаптивного фильтра 320. Кроме того, при скважности сигнала датчика хода насоса 202 близкой к 50% половина гармоник теряется. Например, в сигнале датчика хода насоса 202 могут отсутствовать четные гармоники, что приводит к смещению выходного сигнала. Соответственно, в некоторых вариантах реализации модуль препроцессора 310 выполнен с возможностью восстановления гармоник опорного сигнала. В случае когда в эти гармоники входит большинство помех, их фильтрация эффективно устраняет большинство помех, обусловленных работой бурового насоса.
[0025] На фиг. 4 проиллюстрирован сигнал датчика хода насоса 202 (S) и входной сигнал 302 (x) адаптивного фильтра в соответствии с некоторыми вариантами реализации изобретения. На Фиг. 4 осью абсцисс представлено время (в условных единицах), а осью ординат представлена амплитуда сигнала (в условных единицах). На Фиг. 4 сигнал датчика хода насоса 202 содержит передний фронт 412, плоскую вершину 414 и задний фронт 416. Во входном сигнале адаптивного фильтра 302 сохраняют передний фронт 412 и задний фронт 416 от сигнала датчика хода насоса 202, но удаляют плоскую вершину 414. Соответственно, во входном сигнале адаптивного фильтра 302 каждый из прямоугольных импульсов в сигнале датчика хода насоса 202 заменяют импульсами с острыми вершинами. В результате, входной сигнал адаптивного фильтра 302 имеет более широкий частотный спектр, чем сигнал датчика хода насоса 202. Использование входного сигнала адаптивного фильтра 302 в качестве входного сигнала адаптивного фильтра 320 предпочтительно, поскольку эффективность фильтра возрастает по мере увеличения ширины спектра входного сигнала. В некоторых вариантах реализации, более остроконечные характеристики по временной шкале (абсцисса на Фиг. 4) входного сигнала 302 адаптивного фильтра обеспечивают увеличение разрешающей способности по времени, что является желательным для устранения помех, обусловленных работой бурового насоса.
[0026] Со ссылкой на Фиг. 3 и 4, переменные S, x, p, r и e могут быть линейными массивами, индексированными по целочисленному значению 'n', которое указывает временную последовательность. Например, в некоторых вариантах реализации временная последовательность может определяться вертикальными штриховыми линиями на Фиг. 4. В целом, в некоторых вариантах реализации временная последовательность может в точности не совпадать с вершинами, впадинами или какими-либо другими специфическими особенностями сигнала давления 201 или сигнала датчика хода насоса 202. Кроме того, в более широком смысле временная последовательность для индексированных массивов S, x, p, r и e может даже не разделяться на временные интервалы. В некоторых вариантах реализации временная последовательность определяется сигналом тактовой синхронизации в схеме цифровой выборки или в компьютерной системе в контроллере 110 (см. Фиг. 1). Например, в некоторых вариантах реализации схема выборки может работать с частотой примерно 500 Гц или меньше. Как правило, сигнал от акустического преобразователя 102 имеет частоту не более 50 Гц. При наличии помех, обусловленных работой бурового насоса, с частотой менее 100 Гц, фильтр помех, обусловленных работой бурового насоса, 300 может содержать фильтры для подавления входных сигналов r 201 и S 202 за пределами частоты 125 Гц (с использованием соответствующих алгоритмов электронной фильтрации). Кроме того, может применяться фильтр помех, обусловленных работой бурового насоса, 300 с частотой дискретизации 250 Гц для формирования колебательных сигналов, проиллюстрированных на Фиг. 4. Следует отметить, что приведенные выше конкретные диапазоны частот являются лишь иллюстративными, а не ограничивающими для различных вариантов реализации в пределах объема данного изобретения. В связи с этим размер линейных массивов S, x, p, r и e определяется длиной L, настраиваемой в адаптивном фильтре 320. Значение L является целым числом выборок, полученных от датчика давления при использовании схемы выборки, как описано выше.
[0027] Выходной сигнал 322 (p) адаптивного фильтра может быть результатом применения функции фильтрации W, заданной коэффициентами Wn ко входному сигналу 302 (x) адаптивного фильтра, как:
[0028] Выходной сигнал 336 (e) может быть записан как:

[0029] Как описано в данной заявке, критерий СКО включает минимизацию среднего значения квадрата амплитуды ошибки 336 (<en2>). Использование данного критерия позволяет с помощью адаптивного фильтра устранять из сигнала компоненты, коррелирующие с датчиками хода насоса. При условии отсутствия корреляции между датчиками хода насоса и передаваемым сигналом избирательно подавляются помехи, обусловленные работой бурового насоса. Для реализации модуля адаптивного фильтра 320 могут использоваться различные способы. В одном варианте реализации используют алгоритм аффинных проекций (АП) 'N' порядка, где N может быть любым целым числом (например, 4), как указано ниже. Процесс адаптации для АП 'N' порядка при условии, что адаптивный фильтр имеет длину L, можно описать следующим образом: Предположим, что вектор пишется заглавными буквами, а скаляр пишется строчными буквами. Обновленное уравнение для фильтра помех, обусловленных работой бурового насоса, W в момент времени n будет иметь следующий вид:

[0030] где

[0031] является матрицей входного сигнала x, в которой каждая строка является смещенным вариантом предыдущей строки.

[0032] и:

[0033] является матрицей выходного сигнала e, в которой каждая строка является смещенным вариантом предыдущей строки. В большинстве случаев сигнал r 201, принятый от датчика давления 101 и содержащий полезные данные от расположенного в стволе скважины 120 акустического преобразователя 102, может быть высоко коррелированным с помехами, обусловленными работой бурового насоса. В таких конфигурациях адаптивный фильтр 320 может иметь увеличенные отклонения и не сходиться в течение приемлемого времени. Кроме того, в некоторых вариантах реализации в случае, когда в сигнале r 201 содержатся полезные данные от акустического преобразователя 102, адаптивный фильтр 320 может эффективно подавлять сигнал в целом, включая полезные данные. Чтобы избежать любой из двух крайностей, в некоторых вариантах реализации для каскада адаптивного фильтра 320 используют схему переключения шага адаптации. В некоторых вариантах реализации в схеме переключения шага адаптации используют коэффициент адаптации μ следующим образом. Коэффициент адаптации μ имеет два конкурирующих фактора, влияющих на сходимость модуля адаптивного фильтра 320:
[0034] 1. Увеличение скорости сходимости: более высокое значение μ приводит к большей скорости сходимости адаптивного фильтра; и
[0035] 2. Увеличение флуктуационного шума (т.е. расстройка). Флуктуационный шум представляет собой шум стационарного состояния, вызванный флуктуацией коэффициентов фильтра W от итерации 'n' к итерации 'n+1' (см. Ур. 3): более высокое значение μ приводит к большей расстройке.
[0036] Из-за конкурирующих факторов 1 и 2 при выборе коэффициента адаптации μ требуется найти некоторый компромисс.
[0037] В некоторых вариантах реализации значение μ ниже 0,5 может предотвратить несходимость модуля адаптивного фильтра 320. Соответственно, некоторые варианты реализации позволяют избежать значений μ выше 0,5. В некоторых вариантах реализации может быть выбрано значение для μ вплоть до 0,2. В схеме переключения шага адаптации начальное значение μ постепенно уменьшают по мере сходимости фильтра и увеличения числа итераций. Сходимость может быть проверена путем проверки скорости изменения коэффициентов адаптивного фильтра (|Wn-Wn+1|, см. Ур. 3). В некоторых вариантах реализации итерации, описанные в Ур. 3 могут быть завершены в строго определенное время ('nзавер') после инициализации. Например, в некоторых вариантах реализации могут быть применены восемь (8) этапов переключения шага адаптации, причем на каждом этапе значение μ может быть уменьшено на некоторый коэффициент, например 0,55. Этапы могут выполняться через фиксированные интервалы времени (заданное число выборок). После достижения сходимости при конечном значении μ данное значение остается до следующего возврата системы в исходное состояние. Данный возврат в исходное состояние может быть инициирован, например, путем вычисления частоты датчиков хода насоса и ее сравнения с некоторым нижним порогом. В некоторых вариантах реализации, возврат в исходное состояние может быть инициирован изменением частоты насоса, фазы насоса или даже добавлением или удалением дополнительного насоса из буровой системы. В частности, нижнее пороговое значение может быть, например, двенадцать (12) Гц. Таким образом, когда частота датчика хода насоса падает ниже 12 Гц, срабатывает возврат системы в исходное состояние.
[0038] В некоторых вариантах реализации x 302 может содержать длинные строки одинаковых или аналогичных значений. Например, x 302 может содержать длинные строки нулей. Это может привести к тому, что матрица An (см. Ур. 4) становится сингулярной, а матрица (An⋅AT) не может быть обратимой, как в Ур. 3. Для предотвращения такого сценария некоторые варианты реализации включают прореживание ошибок. Таким образом, вместо взятия последних N ошибок рассматривают произвольную последовательность непоследовательных N предыдущих ошибок. Например, предположим, что вместо взятия ошибок (en, en-1 en-2, en-3) мы берем последовательность (en-k0 en-k1 en-k2, en-k3). Последовательность {ko, k1, k2, k3} может быть любой последовательностью целых чисел, например {0, 5, 11, 23}.Данная последовательность теперь может использоваться для обновления адаптивного фильтра W (см. Ур. 3).
[0039] На Фиг. 5, снова со ссылкой на Фиг. 1, проиллюстрирована функциональная схема каскадно включенных фильтров 500 a, b помех, обусловленных работой бурового насоса, используемых для устранения двух помех, обусловленных работой бурового насоса, при гидроимпульсной телеметрии в соответствии с некоторыми вариантами реализации изобретения. В большинстве случаев для нагнетания бурового раствора 125 через бурильную колонну 133 используется более одного насоса 105. Соответственно, каждый насос 105 может иметь разную скорость хода. Варианты реализации в соответствии с данным изобретением могут быть выполнены с возможностью устранения комбинированных помех нескольких насосов с использованием каскадного расположения фильтров 500а и 500b, как проиллюстрировано на Фиг. 5.
[0040] Без потери общего смысла, на Фиг. 5 проиллюстрированы два включенных каскадно фильтра помех 500а и 500b для устранения помех от двух насосов (ниже совместно именуются фильтрами 500). Следует отметить, что помехи от произвольного числа K насосов могут быть устранены путем каскадного включения равного числа K фильтров помех 500. Каждый из насосов может содержать датчик хода насоса, выполненный с возможностью формирования сигнала (S1) 202а датчика хода насоса для первого насоса, и сигнал (S2) 202b датчика хода насоса для второго насоса. Фильтр 500а помех, обусловленных работой бурового насоса, содержит модуль препроцессора 510a, модуль адаптивного фильтра 520a и модуль сумматора 530a. Соответственно, фильтр 500a помех, обусловленных работой бурового насоса, выполнен с возможностью обработки входного сигнала (x1) адаптивного фильтра 502a, опорного сигнала (p1) 522a и сигнала давления (r1) 201 для формирования выходного сигнала (e1) 536a и входного сигнала обратной связи 532a. В некоторых вариантах реализации входной сигнал обратной связи 532a является выходным сигналом (e1) 536a, а коэффициент адаптации μa применяется к сигналу обратной связи 532a в адаптивном фильтре 520a. Фильтр 500b помех, обусловленных работой бурового насоса, содержит модуль препроцессора 510b, модуль адаптивного фильтра 520b и модуль сумматора 530b. Соответственно, фильтр 500b помех, обусловленных работой бурового насоса, выполнен с возможностью обработки входного сигнала (x2) адаптивного фильтра 502b, выходного сигнала фильтра (p2) 522b и выходного сигнала (e1) 536a для формирования выходного сигнала (e2) 536b и входного сигнала обратной связи 532b. В некоторых вариантах реализации входной сигнал обратной связи 532b является выходным сигналом (e2) 536b, а коэффициент адаптации μb применяется к сигналу обратной связи 532b в адаптивном фильтре 520b. Модули препроцессора 510a,b; модули адаптивного фильтра 520a,b; и модули сумматора 530a,b более подробно описаны выше со ссылкой на подобные компоненты (см. Фиг. 3), поэтому их подробное описание не будет приводиться. Как правило, коэффициенты адаптации μb и μb не являются одинаковыми. В некоторых вариантах реализации коэффициенты адаптации μa и μb может быть похожими или примерно одинаковыми.
[0041] Фиг. 6 проиллюстрирована компьютерная система 600, выполненная с возможностью фильтрации помех, обусловленных работой бурового насоса, при гидроимпульсной телеметрии в соответствии с некоторыми вариантами реализации изобретения. В соответствии с одним аспектом данного изобретения компьютерная система 600 может входить в состав буровой системы (например, контроллера 110 в буровой системе 100, см. Фиг. 1). Компьютерная система 600 содержит схему процессора 602, соединенную с шиной 608. Шина 608 может также соединять другие схемы в компьютерном устройстве 600, такие как схема памяти 604, запоминающее устройство для данных 606, модуль ввода/вывода (I/O) 610, модуль связи 612 и периферийные устройства 614 и 616. В некоторых аспектах изобретения компьютерная система 600 может быть реализована с использованием аппаратных средств или комбинации программного обеспечения и аппаратных средств, либо на выделенном сервере или интегрирована в другой объект или распределена между несколькими объектами.
[0042] Компьютерная система 600 содержит шину 608 или другой механизм связи для передачи информации и схему процессора 602, соединенную с шиной 608 для обработки данных. К примеру, компьютерная система 600 может быть реализована с помощью одной или более схем процессора 602. Схема процессора 602 может быть выполнена в виде микропроцессора общего назначения, микроконтроллера, процессора обработки цифровых сигналов (ПОЦС), специализированной интегральной схемы (СБИС), программируемой пользователем вентильной матрицы (ППВМ), программируемого логического устройства (ПЛУ), контроллера, машины состояний, стробируемой логики, дискретных аппаратных компонентов или любого другого подходящего объекта, выполненного с возможностью вычислений или другой обработки данных.
[0043] Наряду с аппаратным обеспечением компьютерная система 600 содержит код, который создает условия выполнения указанной компьютерной программы, например, код, на котором основано микропрограммное обеспечение процессора, стек протоколов, система управления базами данных, операционная система или сочетание одного или более из них, хранящиеся в схеме памяти 604, такой как оперативное запоминающее устройство (ОЗУ), флэш-память, постоянное запоминающее устройство (ПЗУ), программируемое постоянное запоминающее устройство (ППЗУ), электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ), регистры, жесткий диск, съемный диск, компакт-диск, DVD-диск или любое другое подходящее запоминающее устройство, соединенное с шиной 608, для хранения информации и команд, которые должны выполняться процессором 602. Схема процессора 602 и схема памяти 604 могут быть дополнены специализированной логической схемой или включены в ее комплектацию.
[0044] Команды могут быть сохранены в схеме памяти 604 и реализованы в одном или более компьютерных программных продуктах, т. е., одном или более модулей команд компьютерной программы, закодированных на компьютерном машиночитаемом носителе для выполнения, или для управления работой компьютерной системы 600, и в соответствии с любым общеизвестным для специалистов в данной области техники способом, включая, но не ограничиваясь этим, компьютерные языки, такие как языки, ориентированные на обработку данных (например, SQL, dBase), системные языки (например, C, Objective-C, C++, Ассемблер), языки описания архитектуры (например, Java,.NET), и языки функционального программирования (например, PHP, Ruby, Perl, Python). Команды также могут быть реализованы в компьютерных языках, таких как массивно-ориентированные языки, аспектно-ориентированные языки, ассемблерные языки, авторизованные языки, языки интерфейса командной строки, компилируемые языки, языки параллельного программирования, языки программирования с операторными скобками, языки потоков данных, языки описания структуры данных, декларативные языки, экзотические языки, расширения языков программирования, языки четвертого поколения, функциональные языки, языки интерактивного режима, интерпретируемые языки программирования, итерационные языки, языки на основе списка, предметно-ориентированные языки, логико-ориентированные языки, машинные языки, макроязыки, языки метапрограммирования, многопарадигматические языки, методы численного анализа, языки программирования, не основанные на английском языке, объектно-ориентированные языки, основанные на классах, объектно-ориентированные языки, основанные на прототипах, языки программирования со значимыми отступами, процедурные языки, языки рефлексивного программирования, языки программирования на основе продукционных правил, языки сценариев, стековые языки, синхронные языки, языки обработки синтаксиса, визуальные языки, языки Вирта, встраиваемые языки, и языки программирования на основе XML. Схема памяти 604 может быть использована также для сохранения промежуточных переменных или других промежуточных данных во время выполнения команд, исполняемых схемой процессора 602.
[0045] Как описано в данной заявке, компьютерная программа соответствует файлу в файловой системе, но это не является обязательным условием. Программа может быть записана для сохранения в часть файла, содержащего другие программы или данные (например, один или более сценариев, хранящихся в документе на языке разметки), в одиночный файл, выделенный для указанной программы, либо во множество скоординированных файлов (например, файлов, в которых хранится один или более модулей, подпрограмм или частей кодов). Компьютерная программа может быть развернута для выполнения на одном компьютере или на множестве компьютеров, расположенных на одной площадке либо рассредоточенных между множеством площадок и соединенных между собой посредством сети связи. Способы и логические блок-схемы, приведенные в данном описании изобретения, могут быть реализованы с помощью одного и более программируемых процессоров, выполняющих одну или более компьютерных программ для осуществления функций путем выполнения операций над входными данными и генерации выходных данных.
[0046] Компьютерная система 600 дополнительно содержит устройства хранения данных 606, такие как магнитный диск или оптический диск, соединенные с шиной 608 для хранения информации и команд. Компьютерная система 600 соединена с различными устройствами посредством модуля ввода/вывода 610. Модуль ввода/вывода 610 является любым соответствующим модулем ввода/вывода. Примеры модулей ввода/вывода 610 включают порты данных, такие как USB-порты. Модуль ввода/вывода 610 выполнен с возможностью соединения с модулем связи 612. Примеры модулей связи 612 включают сетевые интерфейсные платы, такие как сетевые карты Ethernet и модемы. В некоторых аспектах изобретения модуль ввода/вывода 610 выполнен с возможностью соединения со множеством устройств, таких как устройства ввода 614 и/или устройство вывода 616. Примеры устройства ввода 614 включают клавиатуру и указывающее устройство, например, мышь или трекбол, с помощью которого пользователь может вводить входные данные в компьютерную систему 600. Другие виды устройств ввода 614 используются также для обеспечения взаимодействия с пользователем, такие как устройство тактильного ввода, устройство визуального ввода, устройство звукового ввода или интерфейсное устройство «мозг-компьютер». Например, предоставляемая пользователю обратная связь может быть сенсорной обратной связью любого вида, например, визуальной обратной связью, звуковой обратной связью или тактильной обратной связью; а входные данные от пользователя могут быть приняты в любом виде, включая акустические, речевые, тактильные или входные сигналы на основе волн, излучаемых мозгом. Примеры устройств вывода 616, выполненные с возможностью отображения информации пользователю, включают устройства отображения, такие как экран на СИД (светоизлучающих диодах), экран ЭЛТ (электронно-лучевой трубки) или экран ЖКД (жидкокристаллического дисплея).
[0047] Компьютерная система 600 может быть выполнена с возможностью выполнения этапов способа в соответствии с любым из способов, описанных в данной заявке, в ответ на выполнение схемой процессора 602 одной или более последовательностей из одной или более команд, содержащихся в схеме памяти 604. Данные команды могут считываться в схему памяти 604 из другого машиночитаемого носителя, такого как устройство хранения данных 606. Выполнение последовательностей команд, содержащихся в основной схеме памяти 604, вызывает выполнение схемой процессора 602 этапов способов, описанных в данной заявке. Для выполнения последовательностей команд, содержащихся в схеме памяти 604, также может использоваться схема многопроцессорной обработки, содержащая один или более процессоров. В альтернативных аспектах для реализации различных аспектов данного изобретения вместо или в сочетании с командами программного обеспечения может использоваться аппаратно реализованная схема. Таким образом, аспекты данного изобретения не ограничены каким-либо конкретным сочетанием аппаратной схемы и программного обеспечения.
[0048] На Фиг. 7 проиллюстрирована блок-схема, включающая этапы способа 700 фильтрации помех, обусловленных работой бурового насоса, при гидроимпульсной телеметрии в соответствии с некоторыми вариантами реализации изобретения. Некоторые варианты реализации могут включать этапы способа 700, связанные с корректировкой конфигурации бурения в буровой системе (например, буровой системе 100, см. Фиг. 1). В целом, этапы способа 700 могут выполняться с помощью любого алгоритма обработки сигнала, в котором требуется удалить помехи в реальном масштабе времени. Примеры таких алгоритмов могут включать протоколы цифровой обработки сигналов, используемые в телекоммуникационной отрасли. Фильтр помех, содержащий модуль препроцессора, выполненный с возможностью получения входного сигнала адаптивного фильтра из выходного сигнала датчика хода насоса (например, фильтр 300 помех, обусловленных работой бурового насоса, модуль препроцессора 310 и датчик хода насоса 202, см. Фиг. 3) может быть выполнен с возможностью осуществления способа 700 в соответствии с некоторыми вариантами реализации изобретения. Фильтр помех может дополнительно содержать модуль адаптивного фильтра для формирования опорного сигнала, и модуль сумматора для формирования выходного сигнала (например, модуль препроцессора 310, сигнал датчика хода насоса 202, входной сигнал адаптивного фильтра 302, модуль адаптивного фильтра 320, опорный сигнал 322, модуль сумматора 330, сигнал обратной связи 332 и выходной сигнал 336, см. Фиг. 3).
[0049] Этапы способов в соответствии со способом 700 могут быть, по меньшей мере, частично осуществлены с помощью компьютерной системы, содержащей схему процессора, выполненную с возможностью выполнения команд, хранящихся в схеме памяти (например, компьютерная система 600, схема процессора 602 и схема памяти 604, см. Фиг. 6). Способы в соответствии со способом 700 могут включать, по меньшей мере, один, но не все из этапов на Фиг. 7, выполняемые в любом порядке. В целом, способы в соответствии с данным изобретением могут включать, по меньшей мере, некоторые этапы на Фиг. 7, выполняемые параллельно. Например, некоторые варианты реализации могут включать по меньшей мере два этапа на Фиг. 7, выполняемые одновременно или почти одновременно.
[0050] Этап 702 включает прием выходного сигнала датчика хода насоса. В некоторых вариантах реализации этап 702 включает прием выходного сигнала датчика хода насоса от датчика хода насоса, расположенного на насосе буровой системы. В некоторых вариантах реализации этап 702 может включать прием выходного сигнала датчика хода насоса при использовании модуля препроцессора и формирование широкополосного входного сигнала адаптивного фильтра при использовании выходного сигнала датчика хода насоса. Например, в некоторых вариантах реализации формирование широкополосного выходного сигнала включает удаление на временной шкале плоских частей сигнала из выходного сигнала датчика хода насоса (например, входного сигнала 302 адаптивного фильтра из сигнала 202 датчика хода насоса, см. Фиг. 4).
[0051] Этап 704 включает выбор коэффициента адаптации в адаптивном фильтре. В некоторых вариантах реализации этап 704 включает выбор коэффициента адаптации 'μ' в Ур. (3) для определения скорости сходимости адаптивного фильтра. В некоторых вариантах реализации этап 704 включает выбор относительно большого значения для коэффициента адаптации 'μ' в случае обнаружения акустическим преобразователем сигнала помех, обусловленных работой бурового насоса, при этом в сигнале давления бурового раствора не передается сообщение. Например, в некоторых вариантах реализации способа 700 этапы 702-706 выполняют в течение нескольких секунд при включенном насосе или насосах, причем данные не передаются акустическим преобразователем. На данном этапе, и до того, как будет достигнута сходимость адаптивного фильтра, коэффициент адаптации μ может быть большим. Соответственно, этап 704 может включать выбор коэффициента адаптации μ около 0,2, или даже больше, например, 0,3, 0,4 или больше. В некоторых вариантах реализации этап 704 включает выбор коэффициента адаптации μ меньше чем одна вторая (0,5) для предотвращения несходимости аффинных проекций.
[0052] Этап 706 включает определение, была ли достигнута сходимость адаптивного фильтра. В некоторых вариантах реализации этап 706 может включать сравнение абсолютного значения ошибки с пороговым (например, |en|, см. Ур. 2). В случае, когда абсолютное значение меньше порогового значения, на этапе 706 могут определить, что была достигнута сходимость адаптивного фильтра. В некоторых вариантах реализации этап 706 может включать сравнение абсолютного значения разности коэффициентов адаптации фильтра с пороговым (например, (|Wn-Wn+1|, см. Ур. 3). Соответственно, в случае, когда абсолютное значение меньше порогового значения, на этапе 706 могут определить, что была достигнута сходимость адаптивного фильтра. В некоторых вариантах реализации этап 706 включает определение, было ли выполнено выбранное число итераций. В случае, когда не была достигнута сходимость адаптивного фильтра, этапы 702-706 повторяют. В случае, когда была достигнута сходимость адаптивного фильтра, или когда было выполнено выбранное число итераций, этап 708 включает коррекцию коэффициента адаптации (например, μ, см.Ур. 3).Соответственно, в некоторых вариантах реализации этап 708 может включать уменьшение значения коэффициента адаптации. Этап 708 может включать уменьшение значения коэффициента адаптации адаптивного фильтра в два раза, или даже больше.
[0053] Этап 710 включает прием входного сигнала датчика. В некоторых вариантах реализации этап 710 включает прием сигнала от датчика давления в буровой системе. В некоторых вариантах реализации этап 712 включает вычитание выходного сигнала адаптивного фильтра из принятого входного сигнала датчика давления в модуле сумматора. Кроме того, в соответствии с некоторыми вариантами реализации изобретения этап 712 включает подачу выходного сигнала модуля сумматора, умноженного на уменьшенный коэффициент адаптации, обратно в адаптивный фильтр. Этап 712 включает предоставление выходного отфильтрованного сигнала. В некоторых вариантах реализации этап 712 включает декодирование отфильтрованного сигнала давления с использованием схем модуляции цифровых сигналов, таких как ФИМ или ШИМ.
[0054] В некоторых вариантах реализации помехи, обусловленные работой бурового насоса, могут незначительно изменяться по частоте или фазе, тем самым ухудшая качество отфильтрованного сигнала, даже после завершения этапов 702-712. Это может произойти в случае, когда в конфигурации с несколькими насосами один из насосов выключается, или включается новый насос. В некоторых вариантах реализации в случае, когда через некоторый интервал времени наблюдается искажение сигнала при работе системы с оптимизированными коэффициентами адаптации W, пользователь может принять решение отслеживать помехи, обусловленные работой бурового насоса, и искать новые коэффициенты W. Таким образом, пользователь может вернуть в исходное состояние процесс переключения шага адаптации, начиная с большого значения коэффициента адаптации μ, при этом воспроизводя этапы способа 700 для нахождения новых значений коэффициентов адаптации адаптивного фильтра W. Соответственно, способ 700 повторяют для настройки адаптивного фильтра на новую конфигурацию помех, обусловленных работой бурового насоса,.
[0055] На Фиг. 8 проиллюстрирована блок-схема, включающая этапы способа 800 фильтрации помех, обусловленных работой бурового насоса, при гидроимпульсной телеметрии в соответствии с некоторыми вариантами реализации изобретения. Способ 800 может выполняться применительно к буровой системе, содержащей буровую установку, выполненную с возможностью удержания бурильной колонны, соединенной с буровым инструментом, формирующим подземный ствол скважины (например, буровая система 100, буровая установка 150, бурильная колонна 133, буровой инструмент 130 и ствол скважины 120, см. Фиг. 1). В буровой системе акустический преобразователь, расположенный возле бурового инструмента, выполнен с возможностью передачи сообщений между контроллером на поверхности и буровым инструментом (например, акустический преобразователь 102 и контроллер 110, см. Фиг. 1). Сообщения могут передаваться посредством потока бурового раствора и приниматься на поверхности с помощью датчика давления, причем поток бурового раствора подается под давлением с помощью насоса на поверхности (например, поток бурового раствора 125, датчик давления 101 и насос 105, см. Фиг. 1). Кроме того, насос может содержать датчик хода насоса для формирования сигнала для использования фильтром помех, обусловленных работой бурового насоса, в контроллере (датчик хода насоса 107, см. Фиг. 1, фильтр 300 помех, обусловленных работой бурового насоса, см. Фиг. 3). Фильтр помех, обусловленных работой бурового насоса, может содержать модуль адаптивного фильтра для формирования опорного сигнала и модуль сумматора для формирования выходного сигнала (например, модуль препроцессора 310, входной сигнал 302 адаптивного фильтра, модуль адаптивного фильтра 320, опорный сигнал 322, модуль сумматора 330 и выходной сигнал 336, см. Фиг. 3).
[0056] Этапы способов в соответствии со способом 800 могут быть по меньшей мере частично осуществлены с помощью компьютерной системы, содержащей схему процессора, выполненную с возможностью выполнения команд, хранящихся в схеме памяти (например, компьютерная система 600, схема процессора 602 и схема памяти 604, см. Фиг. 6). Способы в соответствии со способом 800 могут включать, по меньшей мере, один, но не все из этапов на Фиг. 8, выполняемые в любом порядке. В целом, способы в соответствии с данным изобретением могут включать, по меньшей мере, некоторые этапы на Фиг. 8, выполняемые параллельно. Например, некоторые варианты реализации могут включать, по меньшей мере, два этапа на Фиг. 8, выполняемые одновременно или практически одновременно.
[0057] Этап 802 включает прием сигнала датчика хода насоса. В некоторых вариантах реализации этап 802 включает прием сигнала датчика хода насоса от бурового насоса в буровой системе. В некоторых вариантах реализации этап 802 может дополнительно включать прием выходного сигнала датчика хода насоса при использовании модуля препроцессора.
[0058] Этап 804 включает увеличение ширины спектра выходного сигнала датчика хода насоса для формирования входного сигнала адаптивного фильтра. Этап 804 включает формирование входного сигнала адаптивного фильтра, имеющего ширину спектра большую, чем у выходного сигнала датчика хода насоса при использовании модуля препроцессора. Соответственно, этап 804 может включать удаление плоских частей колебательного сигнала, представляющего временную последовательность сигнала датчика хода насоса. Например, этап 804 может включать удаление плоских частей, представляющих «высокое» значение сигнала в сигнале датчика хода насоса, оставляя острые вершины, образованные положительным и отрицательным скатами сигнала датчика хода насоса (см. Фиг. 4).
[0059] Этап 806 включает применение адаптивного фильтра ко входному сигналу адаптивного фильтра. В некоторых вариантах реализации этап 806 включает выбор коэффициента адаптации для адаптивного фильтра. Этап 808 включает настройку адаптивного фильтра для уменьшения ошибки. В некоторых вариантах реализации этап 808 включает подачу выходного сигнала адаптивного фильтра в качестве сигнала обратной связи на модуль адаптивного фильтра. Кроме того, в некоторых вариантах реализации этап 808 включает изменение коэффициента адаптации для уменьшения амплитуды выходного сигнала адаптивного фильтра. Этап 810 включает прием входного сигнала датчика. В некоторых вариантах реализации этап 810 включает прием сигнала от датчика давления в буровой системе. Кроме того, в соответствии с некоторыми вариантами реализации изобретения этап 810 включает снижение коэффициента адаптации до около 50% от его предыдущего значения.
[0060] Этап 812 включает фильтрацию помех, обусловленных работой бурового насоса, из принятого входного сигнала датчика давления. В некоторых вариантах реализации этап 812 включает вычитание выходного сигнала адаптивного фильтра из принятого входного сигнала датчика давления в модуле сумматора. Кроме того, в соответствии с некоторыми вариантами реализации изобретения этап 812 включает подачу выходного сигнала модуля сумматора, умноженного на уменьшенный коэффициент адаптации, обратно в адаптивный фильтр. В некоторых вариантах реализации этап 812 включает декодирование отфильтрованного сигнала давления с использованием схем модуляции цифровых сигналов, таких как ФИМ или ШИМ.
[0061] Этап 814 включает корректировку конфигурации бурения, основываясь на отфильтрованном сигнале давления. В некоторых вариантах реализации этап 814 может включать увеличение, уменьшение скорости бурения или остановку бурения. В некоторых вариантах реализации этап 818 может включать инициирование отклонения бурового инструмента в другом направлении. Например, буровой инструмент может быть отклонен из вертикальной конфигурации бурения в горизонтальную конфигурацию бурения. В некоторых вариантах реализации этап 814 может включать регулирование потока бурового раствора. Например, этап 814 может включать увеличение или уменьшение потока бурового раствора. В некоторых вариантах реализации этап 814 может включать увеличение или уменьшение давления насоса. Кроме того, в некоторых вариантах реализации этап 814 может включать добавление в поток бурового раствора химических веществ и других добавок.
[0062] Общепризнанно, что различные варианты реализации в данной заявке, относящиеся к компьютерному управлению и искусственным нейронным сетям, включая различные блоки, модули, элементы, компоненты, способы и алгоритмы, могут быть реализованы с помощью компьютерного аппаратного обеспечения, программного обеспечения, их комбинаций и тому подобного. Чтобы проиллюстрировать эту взаимозаменяемость аппаратных средств и программного обеспечения, различные иллюстративные блоки, модули, элементы, компоненты, способы и алгоритмы были описаны, в основном, с точки зрения их функциональности. Будет ли такая функциональность реализована в виде аппаратных средств или программного обеспечения зависит от конкретного применения и каких-либо ограничений, налагаемых конструкцией. По меньшей мере, по этой причине следует признать, что специалисты в данной области техники могут реализовать описанные функциональные возможности различными способами для конкретного применения. Кроме того, различные компоненты и блоки могут быть расположены в другом порядке или разделены по-другому, например, не выходя за рамки описанных явным образом вариантов реализации изобретения.
[0063] Компьютерное аппаратное обеспечение, используемое для реализации различных иллюстративных блоков, модулей, элементов, компонентов, способов и алгоритмов, описанных в данной заявке, может содержать процессор, выполненный с возможностью выполнения одной или более последовательностей команд, условий программирования или кода, хранящегося на энергонезависимом машиночитаемом носителе. Процессор может быть выполнен в виде, например, микропроцессора общего назначения, микроконтроллера, процессора обработки цифровых сигналов, специализированной интегральной схемы, программируемой пользователем вентильной матрицы, программируемого логического устройства, контроллера, машины состояний, стробируемой логики, дискретных аппаратных компонентов, искусственных нейронных сетей или любого другого подходящего объекта, выполненного с возможностью вычислений или других манипуляций с данными. В некоторых вариантах реализации компьютерные аппаратные средства могут также содержать такие элементы как, например, память (например, оперативное запоминающее устройство (ОЗУ), флэш-память, постоянное запоминающее устройство (ПЗУ), программируемое постоянное запоминающее устройство (ППЗУ), электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ), регистры, жесткие диски, съемные диски, компакт-диски (CD-ROM), цифровые универсальные диски (DVD) или любое другое подобное подходящее запоминающее устройство или носитель.
[0064] Описанные в данной заявке исполняемые последовательности могут быть реализованы с помощью одной или более последовательностей кода, содержащегося в памяти. В некоторых вариантах реализации такой код может быть считан в память с другого машиночитаемого носителя. Выполнение последовательностей команд, содержащихся в памяти, может вызывать выполнение процессором этапов способов, описанных в данной заявке. Для выполнения последовательностей команд, содержащихся в схеме памяти, может также использоваться схема многопроцессорной обработки, содержащая один или более процессоров. Кроме того, для реализации различных вариантов реализации, описанных в данной заявке, может использоваться аппаратно реализованная схема вместо или в сочетании с командами программного обеспечения. Таким образом, данные варианты реализации не ограничены каким-либо конкретным сочетанием аппаратного обеспечения и/или программного обеспечения.
[0065] В контексте данной заявки машиночитаемый носитель будет относиться к любому носителю, выполненному с возможностью прямого или косвенного представления команд для выполнения процессором. Машиночитаемый носитель может принимать множество форм, включая, например, энергонезависимый носитель, энергозависимый носитель и среду передачи данных. Энергонезависимые носители могут представлять собой, например, накопитель на оптических и магнитных дисках. Энергонезависимые носители могут представлять собой, например, динамическую память. Среды передачи данных могут представлять собой, например, коаксиальные кабели, провод, волоконно-оптические кабели и провода, образующие шину. Общие формы машиночитаемых носителей могут представлять собой, например, дискеты, гибкие диски, жесткие диски, магнитные ленты, другие аналогичные магнитные носители, компакт-диски (CD-ROM), цифровые универсальные диски (DVD), другие аналогичные оптические носители, перфокарты, бумажные ленты, а также аналогичные физические носители с перфорированными отверстиями, ОЗУ, ПЗУ, ППЗУ, ЭСППЗУ, флэш-ЭСППЗУ.
[0066] Описанные в данной заявке варианты реализации изобретения включают:
[0067] A. Способ, включающий: прием выходного сигнала датчика хода насоса, выбор коэффициента адаптации в модуле адаптивного фильтра, корректировку коэффициента адаптации, когда модуль адаптивного фильтра достигает сходимости, прием входного сигнала датчика, подачу выходного отфильтрованного сигнала и изменение конфигурации бурового инструмента, основываясь на выходном сигнале.
[0068] B. Устройство, содержащее схему памяти, выполненную с возможностью хранения команд, схему процессора, выполненную с возможностью выполнения команд, выполнение которых вызывает выполнение устройством: прием выходного сигнала датчика хода насоса, выбор коэффициента адаптации в модуле адаптивного фильтра, корректировку коэффициента адаптации, когда модуль адаптивного фильтра достигает сходимости, принимают входной сигнал датчика, подачу на выход отфильтрованного сигнала и изменение конфигурации бурового инструмента, основываясь на выходном сигнале.
[0069] C. Способ, включающий: прием сигнала датчика хода насоса, увеличение ширины спектра сигнала датчика хода насоса для формирования входного сигнала адаптивного фильтра, применение адаптивного фильтра ко входному сигналу адаптивного фильтра, настройку адаптивного фильтра для уменьшения ошибки, прием входного сигнала датчика давления, о фильтрацию помех, обусловленных работой бурового насоса, из принятого входного сигнала датчика давления, и корректировку конфигурации бурения, основываясь на отфильтрованном сигнале давления.
[0070] Каждый из вариантов реализации изобретения A, B и C может включать один или более из следующих дополнительных элементов в любой комбинации: Элемент 1: отличающийся тем, что прием входного сигнала датчика включает прием сигнала от датчика давления в буровой системе. Элемент 2: отличающийся тем, что прием выходного сигнала датчика хода насоса включает прием сигнала датчика хода насоса от бурового насоса в буровой системе. Элемент 3, отличающийся тем, что прием выходного сигнала датчика хода насоса дополнительно включает формирование входного сигнала адаптивного фильтра, имеющего ширину частотного спектра больше, чем у выходного сигнала датчика хода насоса. Элемент 4: включающий подачу на модуль адаптивного фильтра входного сигнала адаптивного фильтра. Элемент 5: отличающийся тем, что корректировка коэффициента адаптации включает снижение коэффициента адаптации до около 50% от его предыдущего значения. Элемент 6: дополнительно включающий подачу на модуль адаптивного фильтра в качестве сигнала обратной связи разности между принятым входным сигналом датчика и выходным сигналом адаптивного фильтра, измененным с помощью коэффициента адаптации. Элемент 7: отличающийся тем, что подача выходного отфильтрованного сигнала включает изменение коэффициента адаптации адаптивного фильтра для уменьшения амплитуды выходного сигнала. Элемент 8: отличающийся тем, что изменение конфигурации бурового инструмента, основанное на выходном сигнале, включает отклонение бурового инструмента из вертикальной конфигурации бурения в горизонтальную конфигурацию бурения. Элемент 9: отличающийся тем, что выходной сигнал датчика хода насоса включает сигнал датчика хода насоса от бурового насоса в буровой системе. Элемент 10: дополнительно включающий второй модуль адаптивного фильтра, выполненный с возможностью приема выходного сигнала второго датчика хода насоса и выходного отфильтрованного сигнала, причем выходной сигнал второго датчика хода насоса содержит сигнал датчика хода насоса от второго бурового насоса в буровой системе. Элемент 11: дополнительно содержащий модуль препроцессора, выполненный с возможностью подачи входного сигнала на модуль адаптивного фильтра, причем входной сигнал модуля адаптивного фильтра имеет ширину спектра большую, чем у выходного сигнала датчика хода насоса.
[0071] Элемент 12: отличающийся тем, что команды, вызывающие прием входного сигнала датчика, содержат команды для приема сигнала от датчика давления в буровой системе. Элемент 13: отличающийся тем, что команды, вызывающие изменение конфигурации бурового инструмента, основанное на выходном сигнале, содержат команды для отклонения бурового инструмента из вертикальной конфигурации бурения в горизонтальную конфигурацию бурения.
[0072] Элемент 14: дополнительно включающий подачу на модуль адаптивного фильтра в качестве сигнала обратной связи выходного сигнала адаптивного фильтра. Элемент 15: отличающийся тем, что настройка адаптивного фильтра для уменьшения ошибки включает изменение коэффициента адаптации для уменьшения амплитуды выходного сигнала адаптивного фильтра. Элемент 16: отличающийся тем, что прием входного сигнала датчика давления включает прием сигнала от датчика давления в буровой системе. Элемент 17: отличающийся тем, что корректировка конфигурации бурения, основанная на отфильтрованном сигнале давления, включает отклонение бурового инструмента из вертикальной конфигурации бурения в горизонтальную конфигурацию бурения.
[0073] Описанные в данной заявке типовые варианты реализации изобретения хорошо адаптированы для достижения указанных целей и преимуществ, а также тех, которые присущи им. Описанные выше конкретные варианты реализации изобретения приводятся исключительно в иллюстративных целях, поскольку описанные варианты реализации изобретения могут быть модифицированы и осуществлены посредством различных, но эквивалентных способов, очевидных для специалистов в данной области техники, извлекающих пользу из принципов, представленных в данной заявке. Кроме того, для деталей конструкции или схемы, проиллюстрированных в данной заявке, не предусмотрены никакие ограничения, кроме описанных в приведенных ниже пунктах формулы изобретения. Таким образом, очевидно, что конкретные иллюстративные варианты реализации изобретения, описанные выше, могут быть изменены, скомбинированы или модифицированы, при этом считается, что все подобные изменения входят в объем и сущность данного изобретения. Изобретение, иллюстративно описанное в данной заявке, может быть соответствующим образом реализовано при отсутствии любого элемента, конкретно не описанного в данной заявке, и/или любого необязательного элемента, описанного в данной заявке. Несмотря на то, что сочетания и способы описаны как «содержащие», «имеющие в своем составе» или «включающие» различные компоненты или этапы, эти сочетания и способы также могут «состоять главным образом из» или «состоять из» различных компонентов и этапов. Все числа и диапазоны, описанные выше, могут варьироваться в пределах некоторой величины. Во всех случаях, когда описан числовой диапазон с нижним пределом и верхним пределом, подразумевают, в частности, описание любого числа и любого включенного диапазона, находящегося в пределах указанного диапазона. В частности, каждый диапазон значений (в виде «от приблизительно a до приблизительно b» или, эквивалентно, «от приблизительно a до b» или, эквивалентно, «от приблизительно a-b»), описанный в данной заявке, следует понимать как описывающий каждое число и диапазон, входящие в более широкий диапазон значений. Кроме того, термины в формуле изобретения имеют свое простое, обычное значение, если иное явно и четко не определено патентообладателем. Кроме того, применяемая в формуле изобретения форма единственного числа предполагает наличие одного или большего количества выражаемых в ней элементов. При наличии противоречий в применении слова или термина в данной заявке и одном или более патентов или других документов, которые могут быть включены в данное описание посредством ссылки, следует принимать определения, соответствующие данному описанию.
[0074] В контексте данной заявки выражение «по меньшей мере один из», предшествующее последовательности наименований, со словами «и» или «или» для отделения любого из этих наименований, изменяет перечисление в целом, а не каждый элемент перечисления (т. е., каждое наименование). Выражение «по меньшей мере один из» не требует выбора по меньшей мере одного наименования; наоборот, это выражение допускает значение, включающее по меньшей мере одно из любого наименования, и/или по меньшей мере одно из наименований в любой комбинации наименований, и/или по меньшей мере одно из каждого наименования. Для примера: каждое из выражений «по меньшей мере один из A, B и C» или «по меньшей мере один из A, B или C» относится только к A, только к B или только к C; любой комбинации A, B и C; и/или по меньшей мере к одному из A, B и C.
Изобретение относится к средствам телеметрии в скважине и может быть использовано для устранения помех, обусловленных работой бурового насоса. В частности, предложен способ фильтрации помех, обусловленных работой бурового насоса, при гидроимпульсной телеметрии, включающий следующее: прием выходного сигнала датчика хода насоса; выбор коэффициента адаптации в модуле адаптивного фильтра; корректировку коэффициента адаптации, когда модуль адаптивного фильтра достигает сходимости; прием входного сигнала датчика; подачу на выход отфильтрованного сигнала; и изменение конфигурации бурового инструмента, основываясь на выходном сигнале. Также раскрыто устройство для реализации указанного способа. 3 н. и 17 з.п. ф-лы, 8 ил.
1. Способ фильтрации помех, обусловленных работой бурового насоса, при гидроимпульсной телеметрии, включающий следующее:
прием выходного сигнала датчика хода насоса;
выбор коэффициента адаптации в модуле адаптивного фильтра;
корректировку коэффициента адаптации, когда модуль адаптивного фильтра достигает сходимости;
прием входного сигнала датчика;
подачу на выход отфильтрованного сигнала; и
изменение конфигурации бурового инструмента, основываясь на выходном сигнале.
2. Способ по п. 1, отличающийся тем, что прием входного сигнала датчика включает прием сигнала от датчика давления в буровой системе.
3. Способ по п. 1, отличающийся тем, что прием выходного сигнала датчика хода насоса включает прием сигнала датчика хода насоса от бурового насоса в буровой системе.
4. Способ по п. 1, отличающийся тем, что прием выходного сигнала датчика хода насоса дополнительно включает формирование входного сигнала адаптивного фильтра, имеющего ширину частотного спектра больше, чем у выходного сигнала датчика хода насоса.
5. Способ по п. 3, дополнительно включающий подачу на модуль адаптивного фильтра входного сигнала адаптивного фильтра.
6. Способ по п. 1, отличающийся тем, что корректировка коэффициента адаптации включает снижение коэффициента адаптации до около 50% от его предыдущего значения.
7. Способ по п. 1, дополнительно включающий подачу на модуль адаптивного фильтра в качестве сигнала обратной связи разности между принятым входным сигналом датчика и выходным сигналом адаптивного фильтра, измененным с помощью коэффициента адаптации.
8. Способ по п. 1, отличающийся тем, что подача отфильтрованного выходного сигнала включает изменение коэффициента адаптации адаптивного фильтра для уменьшения амплитуды выходного сигнала.
9. Способ по п. 1, отличающийся тем, что изменение конфигурации бурового инструмента, основанное на выходном сигнале, включает отклонение бурового инструмента из вертикальной конфигурации бурения в горизонтальную конфигурацию бурения.
10. Устройство для фильтрации помех, обусловленных работой бурового насоса, при гидроимпульсной телеметрии, содержащее:
схему памяти, выполненную с возможностью хранения команд;
схему процессора, выполненную с возможностью выполнения команд, выполнение которых вызывает выполнение устройством этапов, на которых:
принимают выходной сигнал датчика хода насоса;
выбирают коэффициент адаптации в модуле адаптивного фильтра;
корректируют коэффициент адаптации, когда модуль адаптивного фильтра достигает сходимости;
принимают входной сигнал датчика;
подают на выход отфильтрованный сигнал; и
изменяют конфигурацию бурового инструмента, основываясь на выходном сигнале.
11. Устройство по п. 10, отличающееся тем, что выходной сигнал датчика хода насоса содержит сигнал датчика хода насоса от бурового насоса в буровой системе.
12. Устройство по п. 11, дополнительно включающее второй модуль адаптивного фильтра, выполненный с возможностью приема выходного сигнала второго датчика хода насоса и выходного отфильтрованного сигнала, причем выходной сигнал второго датчика хода насоса содержит сигнал датчика хода насоса от второго бурового насоса в буровой системе.
13. Устройство по п. 10, дополнительно содержащее модуль препроцессора, выполненный с возможностью подачи входного сигнала на модуль адаптивного фильтра, причем входной сигнал модуля адаптивного фильтра имеет ширину спектра больше, чем выходной сигнал датчика хода насоса.
14. Устройство по п. 10, отличающееся тем, что команды, вызывающие прием входного сигнала датчика, содержат команды для приема сигнала от датчика давления в буровой системе.
15. Устройство по п. 10, отличающееся тем, что команды, вызывающие изменение конфигурации бурового инструмента, основанное на выходном сигнале, содержат команды для отклонения бурового инструмента из вертикальной конфигурации бурения в горизонтальную конфигурацию бурения.
16. Способ фильтрации помех, обусловленных работой бурового насоса, при гидроимпульсной телеметрии, включающий:
прием сигнала датчика хода насоса;
увеличение ширины спектра сигнала датчика хода насоса для формирования входного сигнала адаптивного фильтра;
применение адаптивного фильтра ко входному сигналу адаптивного фильтра;
настройку адаптивного фильтра для уменьшения ошибки;
прием входного сигнала датчика давления;
фильтрацию помех, обусловленных работой бурового насоса, из принятого входного сигнала датчика давления; и
корректировку конфигурацию бурения, основываясь на отфильтрованном сигнале давления.
17. Способ по п. 16, дополнительно включающий подачу на модуль адаптивного фильтра в качестве сигнала обратной связи выходного сигнала адаптивного фильтра.
18. Способ по п. 16, отличающийся тем, что настройка адаптивного фильтра для уменьшения ошибки включает изменение коэффициента адаптации для уменьшения амплитуды выходного сигнала адаптивного фильтра.
19. Способ по п. 16, отличающийся тем, что прием входного сигнала датчика давления включает прием сигнала от датчика давления в буровой системе.
20. Способ по п. 16, отличающийся тем, что корректировка конфигурации бурения, основанная на отфильтрованном сигнале давления, включает отклонение бурового инструмента из вертикальной конфигурации бурения в горизонтальную конфигурацию бурения.
| Устройство для приема информации с забоя скважины по гидравлическому каналу связи | 1976 |
|
SU599058A1 |
| US 2007192031 A1, 16.08.2007 | |||
| СПОСОБ ПРИЕМА ИНФОРМАЦИИ С ЗАБОЯ СКВАЖИНЫ ПО ГИДРАВЛИЧЕСКОМУ'КАНАЛУ СВЯЗИ | 0 |
|
SU270650A1 |
| СПОСОБ ПОЛУЧЕНИЯ ВЕРТИКАЛЬНЫХ СЕЙСМИЧЕСКИХ ПРОФИЛЕЙ В ХОДЕ БУРЕНИЯ СКВАЖИН | 1994 |
|
RU2144684C1 |
| US 6308562 B1, 30.10.2001 | |||
| US 20020180613 A1, 05.12.2002 | |||
| US 20100314169 A1, 16.12.2010. | |||

