Настоящее изобретение относится к общей области средств содействия пилотированию летательных аппаратов и, в частности, к области винтокрылых летательных аппаратов.
Настоящее изобретение относится к резервированному пилотажному устройству с датчиками, основанному на по меньшей мере двух спутниковых системах навигации для летательного аппарата, определяющему путевую скорость этого летательного аппарата, а также к способу определения этой путевой скорости летательного аппарата.
Такая спутниковая система навигации содержит бортовой приемник, который принимает сигналы от нескольких спутников, принадлежащих к одной группировке спутников, причем этой группировкой управляет стационарная наземная инфраструктура, называемая наземным сегментом. Комплекс, состоящий из приемника, группировки и наземного сегмента образует спутниковую систему навигации, обычно обозначаемую аббревиатурой GNSS, что означает на английском языке ʺGlobal Navigation Satellite Systemʺ. В настоящее время работают несколько систем GNSS, таких как система GPS (ʺGlobal Positioning Systemʺ) в США или система ГЛОНАСС в России. Китайские системы BEIDOU, японская система QZSS и европейская система GALILEO находятся на данный момент в стадии разработки или развертывания.
Общим ограничением для использования систем GNSS в системах пилотирования летательных аппаратов является возможность многочисленных неисправностей, одновременно затрагивающих несколько спутников и даже целую группировку.
Настоящим изобретением предложено использовать наличие нескольких независимых систем GNSS, чтобы преодолеть это ограничение.
В документе US 7436354 описано спутниковое устройство навигации с использованием одновременно нескольких группировок GNSS. Такое устройство работает посредством обработки измерений положения, поступающих от разных систем GNSS и позволяющих обнаруживать простые неисправности и множественные неисправности и превзойти уровень достоверности приемников, основанных на одной группировке, и использует методы автономного контроля достоверности этих измерений, известные под аббревиатурой RAIM (Receiver Autonomous Integrity Monitoring). Однако такое устройство не применяет индивидуальные методы RAIM на каждой из систем GNSS и не позволяет достичь уровня достоверности, необходимого при критических случаях применения. Кроме того, это устройство не гарантирует непрерывности потока навигационных данных, в частности, в случае потери сигналов от спутников по причине воздействия окружающей среды. Наконец, эти навигационные данные содержат положение летательного аппарата, но не его скорость.
Кроме того, известно, что системы GNSS, хотя и были изначально разработаны для обеспечения определения положения различных транспортных средств, позволяют также определять их скорость. Существуют также другие технологии, тоже позволяющие оценивать положение и скорость летательного аппарата без использования спутников.
Такие устройства и, в частности, инерциальные счетчики текущих координат IRS можно комбинировать с использованием приемника GNSS, чтобы ограничить влияние помех, действующих на системы GNSS. В частности, путевая скорость, получаемая при помощи инерциального счетчика текущих координат, позволяет подтвердить путевую скорость, полученную через приемник GNSS, если эти две скорости являются близкими. Кроме того, в случае отказа системы GNSS вследствие неисправности спутника или, например, его ухода из поля видимости инерциальный счетчик текущих координат может заменить собой приемник GNSS на ограниченное время и позволяет оценить путевую скорость летательного аппарата.
Известен, например, документ FR 2906893, в котором раскрыта гибридная система, включающая в себя по меньшей мере два приемника GNSS, по меньшей мере один инерциальный модуль IMU, позволяющий сочетать данные, получаемые от по меньшей мере одного приемника GNSS, и по меньшей мере один расширенный фильтр Калмана. Эта гибридная система позволяет обнаружить отказ на по меньшей мере одном спутнике системы GNSS. Эта гибридная система позволяет также определить радиус безопасности, соответствующий ошибке в положении, выдаваемом этой гибридной системой.
Данные, выдаваемые таким гибридным устройством, являются точными. Однако это гибридное устройство зависит только от одной системы GNSS, например, такой как система GPS. Поэтому выдаваемые данные не являются достаточно надежными. Кроме того, такое гибридное устройство должно содержать большое число оценочных схем, чтобы контролировать, в частности, двойные неисправности спутников. Действительно, это устройство основано на тестах предположений. Таким образом, число оценочных схем соответствует числу конфигураций неисправностей, в соответствии с этими предположениями, которые может обнаруживать это устройство. Например, устройство, рассчитанное для обнаружения всех комбинаций неисправностей двух спутников среди двадцати четырех спутников двух группировок GNSS, должно содержать число оценочных схем, равное  =276. При использовании третьей группировки число необходимых оценочных схем доходит до
=276. При использовании третьей группировки число необходимых оценочных схем доходит до  =630. Это увеличение числа оценочных схем приводит к значительному увеличению стоимости, и такая система не может изменяться при запуске новых группировок.
=630. Это увеличение числа оценочных схем приводит к значительному увеличению стоимости, и такая система не может изменяться при запуске новых группировок.
Известен также документ FR 2964468, в котором описано устройство обнаружения и исключения множественных неисправностей спутников для мульти-системы GNSS, одновременно использующей несколько группировок. Это устройство содержит блок фильтров Калмана, имеющий по меньшей мере один фильтр на каждый используемый спутник, позволяющий исключить данные, поступающие от спутника, который признан неисправным. Кроме того, это устройство может быть дополнено инерциальным модулем IMU. Как и в предыдущем случае, необходимая вычислительная мощность этого блока фильтров Калмана быстро возрастает с числом обрабатываемых спутников и с числом предполагаемых комбинаций спутниковых неисправностей.
В документе US 2011/060483 описано устройство содействия навигации летательного аппарата, использующее три разных канала для определения положения летательного аппарата. Каждый канал может использовать систему GNSS или же гибридную систему GNSS, дополненную инерциальными измерителями.
В документе FR 2996647 описан инерциальный счетчик текущих координат, связанный с приемником, использующим измерения, поступающие от нескольких спутников, распределенных в по меньшей мере двух разных группах спутников, для определения по меньшей мере двух гибридных навигационных решений. Этот инерциальный счетчик текущих координат содержит детектор неисправности спутников, оснащенный главным фильтром Калмана и несколькими вспомогательными фильтрами Калмана и сравнивающий эти гибридные навигационные решения, чтобы обнаружить неисправность спутника и исключить неисправный спутник.
Использование главного фильтра Калмана и вспомогательных фильтров Калмана, а также их применение для устройства навигации, использующего инерциальный счетчик текущих координат и приемник GNSS, описаны, в частности, в документе ʺA New Failure Detection Approach and Its Application to GPS Autonomous Integrity Monitoringʺ - IEEE Transactions on Aerospace and Electronic Systems - Том 31, N° 1 - Январь 1995 года - страницы 499-506.
Настоящее изобретение призвано предложить пилотажное устройство с датчиками для летательного аппарата, позволяющее преодолеть вышеупомянутые ограничения, причем это пилотажное устройство с датчиками может выдавать путевую скорость летательного аппарата, которая достигает уровней достоверности, доступности и точности, необходимых для системы пилотирования, обеспечивая выполнение надежных полетов вблизи земли и препятствий. В частности, это пилотажное устройство с датчиками предназначено для винтокрылого летательного аппарата.
Согласно изобретению, пилотажное устройство с датчиками, предназначенное для винтокрылого летательного аппарата, содержит средства приема GNSS от группировок по меньшей мере двух независимых и разных систем GNSS, а также по меньшей мере один модуль обнаружения и исключения неисправностей FDE. Каждое средство приема GNSS связано с по меньшей мере одной антенной и принимает первоначальные навигационные сигналы от нескольких спутников. Каждый модуль обнаружения и исключения неисправностей FDE принимает по меньшей мере два входных сигнала и выдает выходной сигнал, при этом каждый выходной сигнал содержит измерение и состояние достоверности.
Согласно варианту выполнения, заявленное пилотажное устройство с датчиками содержит по меньшей мере два средства приема GNSS и может, таким образом, использовать по меньшей мере две разные системы GNSS. Предпочтительно заявленное пилотажное устройство с датчиками содержит разные и не подобные средства приема GNSS для раздельной обработки первоначальных навигационных сигналов, поступающих от спутников, принадлежащих к каждой системе GNSS. Таким образом, каждое средство приема GNSS выделено для конкретной системы GNSS, например, такой как система GPS, система ГЛОНАСС, система GALILEO, система QZSS и системы BEIDOU. По сути дела, заявленное пилотажное устройство с датчиками является резервированным как на уровне систем GNSS, так и на уровне средств приема GNSS и может таким образом работать при отказах одной из этих систем GNSS или одного из средств приема.
Согласно другому варианту выполнения, каждое средство приема GNSS является подфункцией единственного приемника мульти-GNSS, то есть может использовать навигационные сигналы, поступающие от спутников, принадлежащих к разным системам GNSS, но выдающих отдельные решения для каждой группировки.
Согласно еще одному варианту выполнения, заявленное пилотажное устройство с датчиками может содержать вместо системы GNSS телекоммуникационную спутниковую систему, такую как система IRIDIUM, которая использует свою собственную спутниковую группировку. Поскольку эфемериды этих спутников известны, можно использовать эффект Доплера на передаваемых ими сигналах, чтобы определить путевую скорость транспортного средства. Это использование системы IRIDIUM возможно, так как заявленное пилотажное устройство с датчиками предназначено прежде всего для определения путевой скорости летательного аппарата, и уже затем его положения.
Это заявленное пилотажное устройство с датчиками отличается тем, что каждое средство приема GNSS содержит первый модуль обнаружения и исключения неисправностей FDE1, и тем, что пилотажное устройство с датчиками содержит по меньшей мере один второй модуль обнаружения и исключения неисправностей FDE2.
Каждый первый модуль обнаружения и исключения неисправностей FDE1 принимает и анализирует первоначальные сигналы и обнаруживает достоверные первоначальные сигналы и/или ошибочные первоначальные сигналы. Пример осуществления этой обработки известен под названием RAIM и описан, например, в документе FR2971857.
Этот метод RAIM, изначально предназначенный для консолидации измерений положения, в дальнейшем тексте настоящего документа будет называться V-RAIM, если его применяют для определения путевой скорости летательного аппарата.
Каждое средство приема GNSS выдает при этом измерение и состояние достоверности первого сигнала путевой скорости летательного аппарата в географической системе координат на основании первоначальных достоверных сигналов, исключая, в случае необходимости, упомянутые ошибочные первоначальные сигналы.
Доступность первого сигнала путевой скорости зависит от числа спутников системы GNSS, находящихся в видимости средства приема GNSS или работающих правильно.
Например, как правило, необходимо наличие четырех спутников для определения трехмерного положения, а также смещения времени часов приемника, или трехмерной скорости летательного аппарата, а также смещения частоты часов приемника. Вместе с тем, необходимо наличие по меньшей мере пятого спутника, чтобы обеспечивать избыточность и обнаруживать таким образом присутствие простой неисправности спутника. По сути дела каждый первый модуль обнаружения и исключения неисправностей FDE1 принимает по меньшей мере четыре первоначальных сигнала для определения первого сигнала путевой скорости и по меньшей мере пять первоначальных сигналов, чтобы гарантировать достоверность этого первого сигнала путевой скорости.
Предпочтительно каждое средство приема GNSS может содержать высокоточные часы, такие как атомные часы, используемые в качестве базы отсчета частоты. Каждому первому модулю обнаружения и исключения неисправностей FDE1 требуется при этом на один первоначальный сигнал меньше, чтобы определить первый сигнал путевой скорости летательного аппарата. Таким образом, средство приема GNSS, содержащее атомные часы, позволяет определить первый сигнал путевой скорости, как только становятся видимыми три спутника, и обнаружить простую неисправность спутника при помощи четырех видимых спутников.
Каждое средство приема GNSS может выдавать гарантированное измерение путевой скорости для первого уровня достоверности, благодаря первому уровню автономного мониторинга. Этот первый уровень достоверности охватывает только простые неисправности спутника группировки этого средства приема GNSS.
Каждый второй модуль обнаружения и исключения неисправностей FDE2 связан и находится на связи с по меньшей мере двумя средствами приема GNSS. Каждый второй модуль обнаружения и исключения неисправностей FDE2 принимает, анализирует и сравнивает первые сигналы путевой скорости, выдаваемые по меньшей мере двумя средствами приема GNSS, затем обнаруживает достоверные первые сигналы путевой скорости и/или ошибочные первые сигналы путевой скорости. При этом каждый второй модуль обнаружения и исключения неисправностей FDE2 может обнаруживать и, возможно, исключать каждую неисправную систему GNSS, локализуя ошибочный первый сигнал путевой скорости, затем определять и выдавать измерение и состояние достоверности второго сигнала путевой скорости летательного аппарата на основании по меньшей мере двух достоверных первых сигналов путевой скорости, исключая, в случае необходимости, ошибочные первые сигналы путевой скорости.
Второй модуль обнаружения и исключения неисправностей FDE2, принимающий первые сигналы путевой скорости, позволяет обнаруживать множественные неисправности, затрагивающие несколько спутников одновременно, а также затрагивающие наземный сегмент системы GNSS. Действительно, сравнивая первые сигналы путевой скорости, передаваемые по меньшей мере двумя средствами приема GNSS, охватывающими по меньшей мере две разные и независимые системы GNSS, каждый второй модуль обнаружения и исключения неисправностей FDE2 может обнаруживать несоответствия между этими первыми сигналами путевой скорости и, как минимум, пассивировать неисправность.
Выражение «пассивировать неисправность» означает сделать эту неисправность пассивной, то есть без катастрофического или опасного последствия для устройства.
Если первоначально были доступны по меньшей мере три системы GNSS и три средства приема, каждый второй модуль обнаружения и исключения неисправностей FDE2 может обнаруживать несоответствия между этими первыми сигналами путевой скорости, идентифицировать систему GNSS, передающую ошибочные первые сигналы путевой скорости, и исключить эту систему GNSS. Таким образом, заявленное устройство позволяет локализовать неисправную систему GNSS, исключить ее и продолжать работать с нормальными системами GNSS.
Как правило, модуль обнаружения и исключения неисправностей FDE, принимающий только два входных сигнала, может лишь обнаруживать несоответствия между этими входными сигналами без идентификации и локализации ошибочного входного сигнала. Следовательно, этот модуль обнаружения и исключения неисправностей FDE не может исключить единственный компонент, выдающий эти ошибочные входные сигналы. В этом случае модуль обнаружения и исключения неисправностей FDE исключает оба входных сигнала. Следовательно, модуль обнаружения и исключения неисправностей FDE не выдает никакого нормального выходного сигнала, когда он обнаруживает несоответствие между этими входными сигналами.
С другой стороны, модуль обнаружения и исключения неисправностей FDE, принимающий по меньшей мере три входных сигнала, может обнаружить несоответствия между этими входными сигналами, затем идентифицировать и локализовать по меньшей мере один ошибочный входной сигнал. Этот модуль обнаружения и исключения неисправностей FDE может при этом исключить каждый компонент, выдающий ошибочный входной сигнал, и выдать нормальный выходной сигнал на основании достоверных входных сигналов. Таким образом, модуль обнаружения и исключения неисправностей FDE, принимающий по меньшей мере три входных сигнала, позволяет обнаружить и исключить неисправный компонент, продолжая выдавать нормальный выходной сигнал.
Второй модуль обнаружения и исключения неисправностей FDE может работать в соответствии с известным методом медиан.
Такой метод описан, например, в документе US 4264955. Согласно этому документу, вычисляют срединное значение входных сигналов. Это срединное значение является гарантированно достоверным, пока число ошибочных первых сигналов путевой скорости меньше половины общего числа первых сигналов путевой скорости, доступных на входе второго модуля обнаружения и исключения неисправностей FDE2.
Кроме того, указанное срединное значение можно использовать в качестве контрольного для сравнения каждого из значений других входных сигналов. Входные сигналы, отклоняющиеся от контрольного значения по абсолютной величине более чем на заранее определенный порог, считаются ошибочными.
В случае, когда второй модуль обнаружения и исключения неисправностей FDE2 получает на своих входах только два нормальных сигнала, чрезмерное отклонение между этими двумя сигналами свидетельствует о неисправности, влияющей один из двух сигналов. Не имея возможности локализовать упомянутую неисправность, второй модуль обнаружения и исключения неисправностей FDE2 пассивирует неисправность, блокируя свой выход.
Наконец, когда второй модуль обнаружения и исключения неисправностей FDE2 принимает только один нормальный первый сигнал путевой скорости и ни одного достоверного второго сигнала путевой скорости, достоверность этого первого сигнала путевой скорости определить невозможно.
Например, заранее определенный порог соответствия равен 0,2 метра в секунду (0,2 м/с).
Таким образом, заявленное устройство с датчиками позволяет определить достаточно достоверный сигнал путевой скорости летательного аппарата, чтобы его можно было использовать в системе пилотирования. Действительно, достоверность этого второго сигнала путевой скорости летательного аппарата является результатом каскадного применения первых модулей и второго модуля обнаружения и исключения неисправностей FDE1 и FDE2, при этом вторая ступень FDE2 обнаруживает неисправности, которые не смогли быть обнаружены только первыми ступенями FDE1.
Кроме того, этот второй сигнал путевой скорости является востребованным, поскольку он определен на основании более чем двух разных и независимых систем GNSS. Действительно, маловероятно, что множественные неисправности затрагивают одновременно несколько независимых систем GNSS.
Кроме того, предпочтительно каждое средство приема GNSS может быть связано с по меньшей мере двумя приемными антеннами. Таким образом, как описано, например, в документе FR2964199, каждое средство приема GNSS может определять направления поступления первоначальных сигналов от спутников, сравнивать их с ожидаемыми направлениями и отбрасывать те из упомянутых первоначальных сигналов, для которых отмечено рассогласование.
В предпочтительном варианте выполнения изобретения доступность достоверного решения путевой скорости для правил пилотирования улучшается при применении инерциальных измерений. В этом варианте выполнения пилотажное устройство с датчиками дополнительно содержит по меньшей мере один инерциальный модуль IMU и по меньшей мере одну платформу гибридизации. Каждый инерциальный модуль IMU выдает сигналы инерциальных измерений, характеризующие ускорения и угловые скорости летательного аппарата. Как известно, посредством интегрирования этих сигналов инерциальных измерений ускорений и угловых скоростей оценивают инерциальную путевую скорость этого летательного аппарата. Каждая платформа гибридизации связана и находится на связи с инерциальным модулем IMU и со вторым модулем обнаружения и исключения неисправностей FDE2. Платформа гибридизации и инерциальный модуль IMU образуют инерциальную цепь.
Каждая платформа гибридизации принимает и обрабатывает эти сигналы инерциальных измерений, а также, возможно, второй сигнал путевой скорости, представляющий собой скорость поддержки, и определяет измерение, представляющее собой третий сигнал путевой скорости летательного аппарата.
Как известно, платформа гибридизации с поддержкой по скорости осуществляет следующие операции:
- интегрирование инерциальных измерений для получения оценки гибридной скорости,
- вычисление отклонения между упомянутой оценкой гибридной скорости и скоростью поддержки,
- расчет поправок инерциальных измерений на основании упомянутого отклонения.
В фазах полета, когда скорость поддержки не доступна, получаемая скорость является чисто инерциальной, но включает в себя последние расчетные поправки.
Таким образом, третий сигнал путевой скорости является постоянно доступным, в том числе когда второй сигнал путевой скорости не доступен.
Предпочтительно заявленное пилотажное устройство с датчиками содержит по меньшей мере две платформы гибридизации и по меньшей мере два инерциальных модуля IMU.
Кроме того, заявленное пилотажное устройство с датчиками может содержать по меньшей мере один третий модуль обнаружения и исключения неисправностей FDE3. Каждый третий модуль обнаружения и исключения неисправностей FDE3 связан и находится на связи с по меньшей мере двумя платформами гибридизации. Каждый третий модуль обнаружения и исключения неисправностей FDE3 принимает, анализирует и сравнивает третьи сигналы путевой скорости, выдаваемые платформами гибридизации, и обнаруживает достоверные третьи сигналы путевой скорости и/или ошибочные третьи сигналы путевой скорости.
При этом каждый третий модуль обнаружения и исключения неисправностей FDE3 может обнаружить неисправность в инерциальной цепи и, как минимум, пассивировать эту неисправность. В вариантах выполнения, в которых пилотажное устройство с датчиками содержит более двух инерциальных цепей, третий модуль обнаружения и исключения неисправностей FDE3 может также локализовать и исключить неисправную инерциальную цепь.
Таким образом, каждый третий модуль обнаружения и исключения неисправностей FDE3 может определять и выдавать измерение и состояние достоверности четвертого сигнала путевой скорости летательного аппарата на основании по меньшей мере двух достоверных третьих сигналов путевой скорости, исключая, в случае необходимости, ошибочные третьи сигналы путевой скорости.
Каждый третий модуль обнаружения и исключения неисправностей FDE3 может применять метод медиан для обнаружения и, возможно, для локализации и исключения третьих искаженных сигналов путевой скорости.
Кроме того, третий модуль обнаружения и исключения неисправностей FDE3 может быть связан и сообщаться с по меньшей мере одним вторым модулем обнаружения и исключения неисправностей FDE2, чтобы принимать, анализировать и сравнивать по меньшей мере один сигнал путевой скорости и третьи сигналы путевой скорости. При этом каждый третий модуль обнаружения и исключения неисправностей FDE3 может обнаруживать и локализовать достоверные вторые и/или третьи сигналы путевой скорости, а также ошибочные вторые и/или третьи сигналы путевой скорости.
Каждый третий модуль обнаружения и исключения неисправностей FDE3 может затем определять и выдавать измерение и состояние достоверности четвертого сигнала путевой скорости летательного аппарата на основании по меньшей мере одного достоверного второго сигнала путевой скорости и/или по меньшей мере двух достоверных третьих сигналов путевой скорости, исключая, в случае необходимости, ошибочные вторые и/или третьи сигналы путевой скорости.
Таким образом, каждый третий модуль обнаружения и исключения неисправностей FDE3 может локализовать обнаруженную неисправность, которая может быть либо неисправностью инерциальной цепи, либо общей неисправностью систем GNSS. Затем каждый третий модуль обнаружения и исключения неисправностей FDE3 может исключить неисправную инерциальную цепь или системы GNSS на основании локализации ошибочных вторых и третьих сигналов путевой скорости.
Третий модуль обнаружения и исключения неисправностей FDE3 выдает четвертый сигнал путевой скорости, применяя, например, метод определения по срединному значению.
Кроме того, использование по меньшей мере одной инерциальной цепи позволяет обеспечить непрерывность выдачи третьего сигнала путевой скорости и, следовательно, четвертого сигнала путевой скорости летательного аппарата в случае недоступности достоверного второго сигнала путевой скорости.
Предпочтительно использование нескольких инерциальных цепей в пилотажном устройстве с датчиками позволяет пассивировать одновременные и когерентные дефекты всех систем GNSS. Такая ситуация является почти невозможной, если рассматриваемые дефекты являются непроизвольными неисправностями. С другой стороны, не следует исключать возможности умышленной попытки одного лица или организации фальсифицировать все сигналы GNSS, принимаемые летательным аппаратом. В таких ситуациях заявленное устройство отбрасывает все вторые сигналы путевой скорости и продолжает выдавать чисто инерциальный достоверный четвертый сигнал путевой скорости.
Согласно частному варианту выполнения изобретения, каждая платформа гибридизации содержит сообщающиеся между собой чисто инерциальную виртуальную платформу и фильтр ошибок гибридизации. Каждая чисто инерциальная виртуальная платформа связана и находится на связи с виртуальным модулем IMU, образуя таким образом инерциальный счетчик текущих координат.
При этом пилотажное устройство с датчиками содержит два инерциальных счетчика текущих координат, вычислительное устройство с двумя каналами вычисления и два фильтра ошибок гибридизации на каждый инерциальный счетчик текущих координат, по одному на каждом канале вычисления. Каждый канал вычисления вычисляет два фильтра ошибок гибридизации, с одной стороны, с вторым модулем обнаружения и исключения неисправностей FDE2 и, с другой стороны, с третьим модулем обнаружения и исключения неисправностей FDE3. Каждый второй модуль обнаружения и исключения неисправностей FDE2 связан и находится на связи с двумя фильтрами ошибок гибридизации, и каждый третий модуль обнаружения и исключения неисправностей FDE3 находится на связи с двумя фильтрами ошибок гибридизации для каждого канала вычисления. Параллельное использование этих двух каналов вычисления позволяет обнаруживать и пассивировать возможное нарушение в работе одного из этих каналов вычисления.
Каждая чисто инерциальная виртуальная платформа принимает сигналы инерциальных измерений от инерциального модуля IMU, которые эта чисто инерциальная виртуальная платформа преобразует в число инерциальную путевую скорость. Таким образом, каждый инерциальный счетчик текущих координат выдает чисто инерциальную путевую скорость летательного аппарата. Каждый фильтр ошибок гибридизации связан при этом с инерциальным счетчиком текущих координат, а также с вторым модулем обнаружения и исключения неисправностей FDE2 для получения чисто инерциальной путевой скорости летательного аппарата и второго сигнала путевой скорости летательного аппарата.
Кроме того, предпочтительно каждый фильтр ошибок гибридизации является фильтром Калмана, который оценивает ошибки, влияющие на переменные состояния, а не оценивает напрямую переменные состояния.
Объектом изобретения является также способ определения путевой скорости летательного аппарата, содержащий несколько этапов.
На первом этапе принимают первоначальные навигационные сигналы от нескольких спутников, принадлежащих по меньшей мере двух разным и независимым системам GNSS.
На втором этапе анализируют эти навигационные сигналы для каждой системы GNSS.
На третьем этапе обнаруживают достоверные первоначальные навигационные сигналы и/или ошибочные первоначальные навигационные сигналы.
На четвертом этапе выдают измерение и состояние достоверности по меньшей мере двух первых сигналов путевой скорости летательного аппарата в географической системе координат для по меньшей мере двух разных и независимых систем GNSS на основании достоверных первоначальных сигналов, исключая, в случае необходимости, ошибочные первоначальные сигналы.
На пятом этапе анализируют и сравнивают первые сигналы путевой скорости.
На шестом этапе обнаруживают достоверные первые сигналы путевой скорости и/или ошибочные первые сигналы путевой скорости.
На седьмом этапе обнаруживают и исключают каждую неисправную систему GNSS, выдающую ошибочный первый сигнал путевой скорости.
На восьмом этапе определяют и выдают измерение и состояние достоверности по меньшей мере одного второго сигнала путевой скорости летательного аппарата на основании по меньшей мере двух достоверных первых сигналов путевой скорости, исключая, в случае необходимости, упомянутые ошибочные первые сигналы путевой скорости.
На восьмом этапе можно определить по меньшей мере один второй сигнал путевой скорости летательного аппарата, если доступны по меньшей мере два первых сигнала путевой скорости. Каждый второй сигнал путевой скорости летательного аппарата определяют при помощи метода медиан.
Таким образом, способ определения путевой скорости летательного аппарата позволяет обнаруживать простую неисправность спутника системы GNSS и/или множественные неисправности внутри одной или нескольких систем GNSS. Таким образом, второй сигнал путевой скорости летательного аппарата остается доступным и достоверным, несмотря на множественные неисправности.
Согласно первой версии этого варианта осуществления изобретения, этот способ может содержать дополнительные этапы.
Во время девятого этапа считывают сигналы инерциальных измерений, при этом сигналы инерциальных измерений характеризуют ускорения и угловые скорости летательного аппарата.
На десятом этапе обрабатывают каждый второй сигнал путевой скорости и сигналы инерциальных измерений.
На одиннадцатом этапе определяют и выдают по меньшей мере одно измерение, представляющее собой по меньшей мере один третий сигнал путевой скорости летательного аппарата, на основании сигналов инерциальных измерений и, в случае необходимости, второго достоверного сигнала путевой скорости, при этом третий сигнал путевой скорости является доступным постоянно.
Во время этого одиннадцатого этапа каждый третий сигнал путевой скорости можно определять в соответствии с известным методом гибридизации, классически применяемым в области авиации. Такой метод гибридизации позволяет выдавать гибридный третий сигнал путевой скорости.
На двенадцатом этапе анализируют и сравнивают третьи сигналы путевой скорости.
Затем в ходе тринадцатого этапа обнаруживают достоверные третьи сигналы путевой скорости и/или ошибочные третьи сигналы путевой скорости.
На четырнадцатом этапе определяют и выдают измерение и состояние достоверности четвертого сигнала путевой скорости летательного аппарата на основании по меньшей мере двух достоверных третьих сигналов путевой скорости, исключая, в случае необходимости, упомянутые ошибочные третьи сигналы путевой скорости. Этот четвертый сигнал путевой скорости можно определять при помощи метода медиан.
Согласно второй версии этого варианта осуществления изобретения, эти дополнительные этапы осуществляют следующим образом, при этом девятый, десятый и одиннадцатый этапы идентичны с первым вариантом осуществления.
На двенадцатом этапе анализируют и сравнивают по меньшей мере один второй сигнал путевой скорости и третьи сигналы путевой скорости.
На тринадцатом этапе обнаруживают и локализуют достоверные вторые сигналы путевой скорости и/или достоверные третьи сигналы путевой скорости, а также ошибочные вторые сигналы путевой скорости и/или ошибочные третьи сигналы путевой скорости.
На четырнадцатом этапе определяют и выдают измерение и состояние достоверности четвертого сигнала путевой скорости летательного аппарата на основании по меньшей мере одного достоверного второго сигнала путевой скорости и/или по меньшей мере двух достоверных третьих сигналов путевой скорости, исключая, в случае необходимости, ошибочные вторые и/или третьи сигналы путевой скорости.
Все эти этапы можно осуществлять последовательно. Вместе с тем, девятый этап можно осуществлять одновременно с по меньшей мере одним из восьми первых этапов.
Изобретение и его преимущества будут более очевидны из нижеследующего описания чисто иллюстративных примеров выполнения со ссылками на прилагаемые чертежи, на которых:
фиг. 1 – винтокрылый летательный аппарат, оснащенный заявленным пилотажным устройством с датчиками;
фиг. 2-4 - несколько вариантов выполнения заявленного пилотажного устройства с датчиками.
Элементы, присутствующие на разных чертежах, имеют одно и то же обозначение.
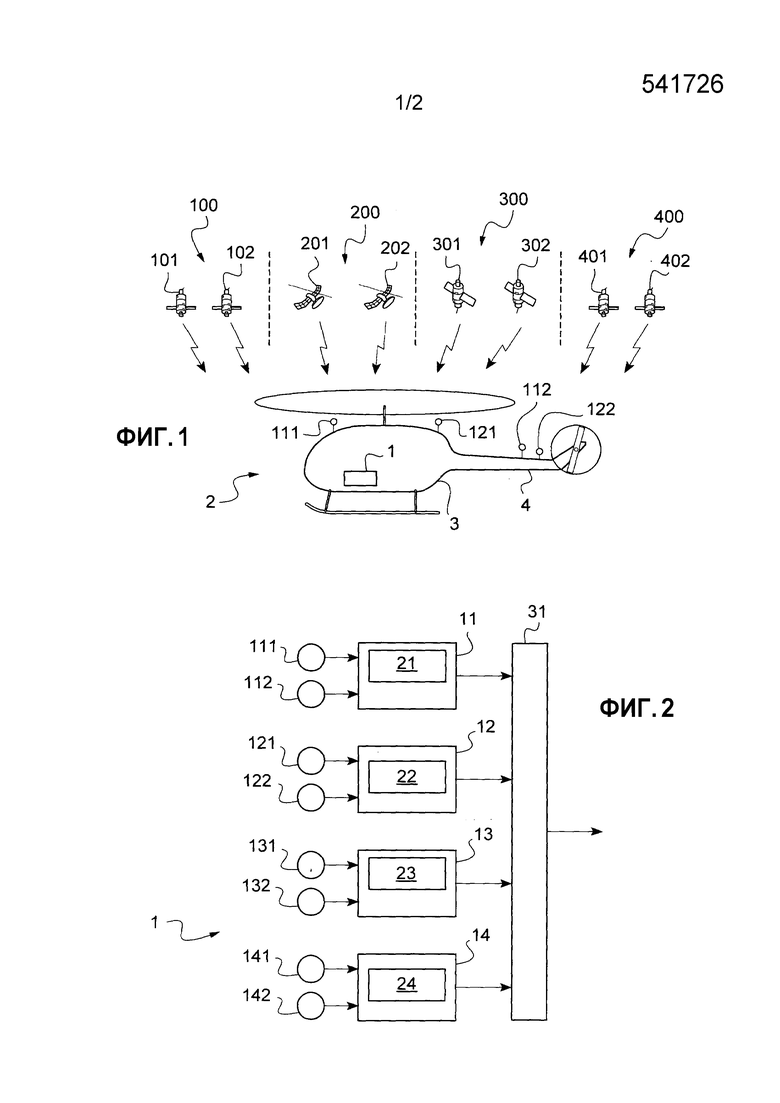
На фиг. 1 показан винтокрылый летательный аппарат 2, оснащенный заявленным пилотажным устройством 1 с датчиками. Это пилотажное устройство 1 с датчиками имеет четыре антенны 111, 112, 121, 122. Две антенны 111, 121 расположены над фюзеляжем 3 летательного аппарата 2, и две антенны 112, 122 установлены на хвостовой балке 4 летательного аппарата 2. Эти антенны 111, 112, 121, 122 позволяют улавливать первоначальные навигационные сигналы, передаваемые различными спутниками 101, 102, 201, 202, 301, 302, 401, 402.
Спутники 101, 102, 201, 202, 301, 302, 401, 402 принадлежат соответственно к системе GNSS 100, 200, 300, 400, такой как система GPS, система ГЛОНАСС, система GALILEO, система QZSS и системы BEIDOU.
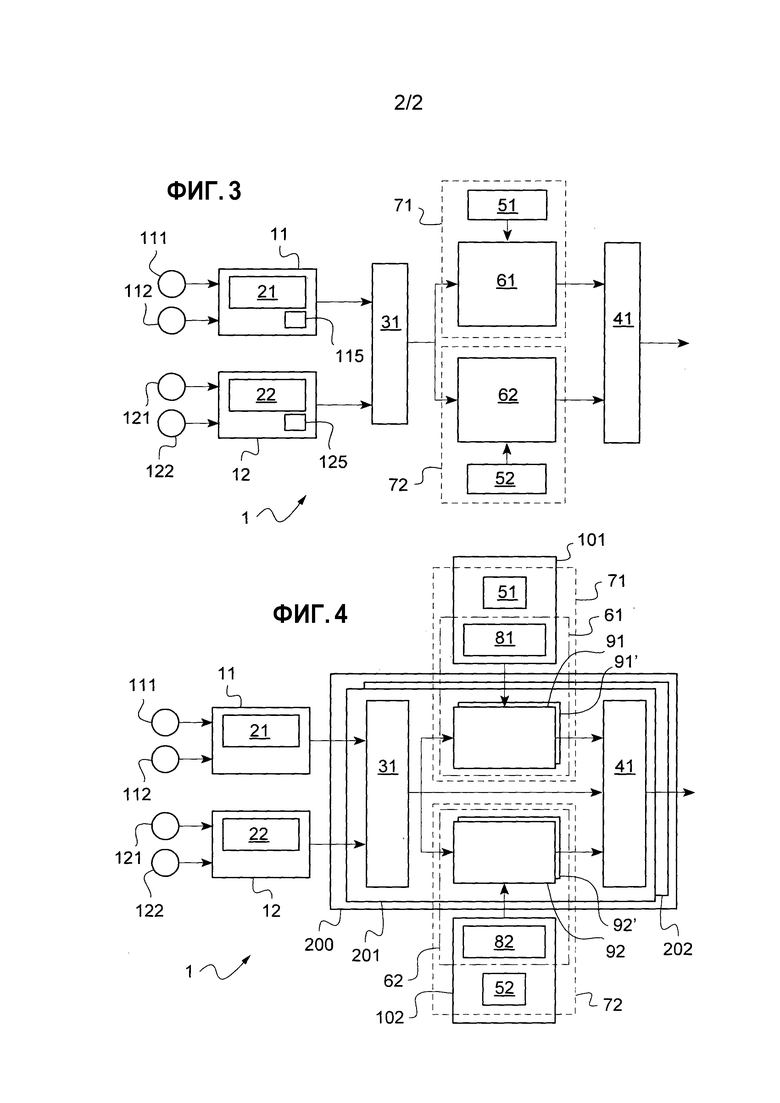
Согласно первому варианту выполнения пилотажного устройства 1 с датчиками, показанному на фиг. 2, пилотажное устройство 1 с датчиками содержит четыре средства приема GNSS 11, 12, 13, 14, выделенные соответственно для системы GNSS 100, 200, 300, 400, и второй модуль обнаружения и исключения неисправностей FDE2 31, связанный с каждым средством приема GNSS 11, 12, 13, 14. Таким образом, пилотажное устройство 1 с датчиками является резервированным на уровне систем GNSS 100, 200, 300, 400 и может обслуживать четыре системы GNSS 100, 200, 300, 400 и преодолевать, таким образом, любой отказ одной из этих систем GNSS 100, 200, 300, 400. Каждое средство приема GNSS 11, 12, 13, 14 связано с двумя антеннами 111, 112, 121, 122, 131, 132, 141, 142 и содержит первый модуль обнаружения и исключения неисправностей FDE1 21, 22, 23, 24.
Каждый первый модуль обнаружения и исключения неисправностей FDE1 21, 22, 23, 24 принимает и анализирует первоначальные навигационные сигналы средства приема GNSS 11, 12, 13, 14, чтобы обнаружить достоверные первоначальные навигационные сигналы и ошибочные первоначальные навигационные сигналы.
Затем, на основании этих достоверных первоначальных сигналов каждый первый модуль обнаружения и исключения неисправностей FDE1 21, 22, 23, 24 может определить первый сигнал путевой скорости летательного аппарата 2. Этот первый сигнал путевой скорости летательного аппарата 2 можно определить, например, при помощи метода V-RAIM автономного контроля достоверности.
Таким образом, каждое средство приема GNSS 11, 12, 13, 14 может выдавать первый сигнал путевой скорости летательного аппарата 2, гарантируя первый уровень автономного мониторинга и достоверность этого первого сигнала путевой скорости в случае простых неисправностей спутника системы GNSS 100, 200, 300, 400.
Второй модуль обнаружения и исключения неисправностей FDE2 31 принимает и сравнивает эти первые сигналы путевой скорости, поступающие от четырех средств приема GNSS 11, 12, 13, 14. При этом второй модуль обнаружения и исключения неисправностей FDE2 31 может обнаруживать множественные неисправности по меньшей мере одной системы GNSS 100, 200, 300, 400, исключать каждую систему GNSS 100, 200, 300, 400, имеющую эту множественную неисправность, и определять второй сигнал путевой скорости летательного аппарата 2.
Второй модуль обнаружения и исключения неисправностей FDE2 31 может применять известный метод медиан для определения второго сигнала путевой скорости на основании двух первых сигналов путевой скорости.
Согласно второму варианту выполнения пилотажного устройства 1 с датчиками, показанному на фиг. 3, пилотажное устройство 1 с датчиками содержит два средства приема GNSS 11, 12, при этом каждое средство приема GNSS 11, 12 связано с двумя антеннами 111, 112, 121, 122, второй модуль обнаружения и исключения неисправностей FDE2 31, два инерциальных модуля IMU 51, 52, две платформы 61, 62 гибридизации и третий модуль обнаружения и исключения неисправностей FDE3 41.
Кроме того, каждое средство приема GNSS 11, 12 содержит первый модуль обнаружения и исключения неисправностей FDE1 21, 22, а также атомные часы 115, 125. Эти атомные часы 115, 125 используют в качестве базы отсчета частоты, позволяющей сократить на одну единицу число спутников, необходимых для каждого средства приема GNSS 11, 12, чтобы определять, с одной стороны, простую неисправность спутников и, с другой стороны, первый сигнал путевой скорости.
Второй модуль обнаружения и исключения неисправностей FDE2 31 связан с двумя средствами приема GNSS 11, 12 и с двумя платформами 61, 62 гибридизации и выдает второй сигнал путевой скорости летательного аппарата 2.
Каждый инерциальный модуль IMU 51, 52 выдает сигналы инерциальных измерений ускорений и угловых скоростей и связан с платформой 61, 62 гибридизации. Инерциальный модуль IMU 51, 52 и платформа 61, 62 гибридизации, с которой он связан, образуют таким образом инерциальную цепь 71, 72. Каждая платформа 61, 62 гибридизации принимает инерциальные измерения ускорений и угловых скоростей и может определить чисто инерциальную путевую скорость летательного аппарата 2.
Каждая платформа 61, 62 гибридизации принимает также второй сигнал путевой скорости летательного аппарата 2 и может, таким образом, обрабатывать этот второй сигнал путевой скорости и чисто инерциальную скорость летательного аппарата 2, чтобы определить третий сигнал путевой скорости летательного аппарата 2.
Этот третий сигнал путевой скорости представляет собой гибридную путевую скорость этого второго сигнала путевой скорости и чисто инерциальной путевой скорости, когда этот второй сигнал путевой скорости является достоверным. Этот третий сигнал путевой скорости равен чисто инерциальной путевой скорости, когда этот второй сигнал путевой скорости является ошибочным или не доступен. Таким образом, этот третий сигнал путевой скорости является постоянно доступным.
Третий модуль обнаружения и исключения неисправностей FDE3 41 связан с двумя платформами 61, 62 гибридизации. Таким образом, этот третий модуль обнаружения и исключения неисправностей FDE3 41 принимает, анализирует и сравнивает два третьих сигнала путевой скорости летательного аппарата 2, чтобы определить четвертый сигнал путевой скорости летательного аппарата 2, используя, например, метод медиан.
Таким образом, третий модуль обнаружения и исключения неисправностей FDE3 41 может обнаруживать несоответствия между этими третьими сигналами путевой скорости летательного аппарата 2, являющиеся следствием, например, неисправности платформы 61, 62 гибридизации или инерциального модуля IMU 51, 52.
Согласно этому второму варианту выполнения, достоверность и доступность четвертого сигнала путевой скорости летательного аппарата 2 улучшаются при использовании двух инерциальных модулей IMU 51, 52 и двух приемников GNSS 11, 12 двух независимых и разных систем GNSS 100, 200.
Согласно третьему варианту выполнения пилотажного устройства 1 с датчиками, показанному на фиг. 4, пилотажное устройство 1 с датчиками содержит, как и во втором варианте выполнения, два средства приема GNSS 11, 12, второй модуль обнаружения и исключения неисправностей FDE2 31, два инерциальных модуля IMU 51, 52, две платформы 61, 62 гибридизации и третий модуль обнаружения и исключения неисправностей FDE3 41. Каждое средство приема GNSS 11, 12 выделено только для одной системы GNSS 100, 200, что позволяет охватывать две системы GNSS 100, 200, например, систему GPS и систему GALILEO.
Пилотажное устройство 1 с датчиками содержит также вычислительное устройство 200, имеющее два канала 201, 202 вычисления. Каждая платформа 61, 62 гибридизации содержит чисто инерциальную виртуальную платформу 81, 82 и два фильтра 91, 91ʹ, 92, 92ʹ ошибок гибридизации, при этом в каждом канале 201, 202 вычисления находится один фильтр 91, 91ʹ, 92, 92ʹ ошибок гибридизации.
В соответствии с каждым каналом 201, 202 вычисления второй модуль обнаружения и исключения неисправностей FDE2 31 связан с двумя средствами приема GNSS 11, 12 и с двумя фильтрами 91, 91ʹ, 92, 92ʹ ошибок гибридизации, а также с третьим модулем обнаружения и исключения неисправностей FDE3 41. Второй модуль обнаружения и исключения неисправностей FDE2 31 выдает, таким образом, достоверный второй сигнал путевой скорости летательного аппарата 2.
Чисто инерциальная виртуальная платформа 81, 82 связана с инерциальным модулем IMU 51, 52 и образует таким образом с этим инерциальный модулем IMU 51, 52 инерциальный счетчик 101, 102 текущих координат, выдающий чисто инерциальную путевую скорость летательного аппарата 2.
Предпочтительно каждый фильтр 91, 91ʹ, 92, 92ʹ ошибок гибридизации является фильтром Калмана.
Каждый фильтр 91, 91ʹ, 92, 92ʹ ошибок гибридизации принимает, анализирует и сравнивает второй сигнал путевой скорости летательного аппарата 2 и чисто инерциальную путевую скорость летательного аппарата 2, затем определяет третий сигнал путевой скорости летательного аппарата 2, который может быть гибридной путевой скоростью или чисто инерциальной путевой скоростью. Таким образом, этот третий сигнал путевой скорости доступен постоянно.
Третий модуль обнаружения и исключения неисправностей FDE3 41 связан с фильтрами 91, 91ʹ, 92, 92ʹ ошибок гибридизации, а также с вторым модулем обнаружения и исключения неисправностей FDE2 31. Этот третий модуль обнаружения и исключения неисправностей FDE3 41 принимает, анализирует и сравнивает два третьих сигнала путевой скорости и второй сигнал путевой скорости, затем определяет четвертый сигнал путевой скорости летательного аппарата 2 в соответствии с этими двумя каналами 201, 202 вычисления. Третий модуль обнаружения и исключения неисправностей FDE3 41 использует, например, метод медиан.
Кроме того, третий модуль обнаружения и исключения неисправностей FDE3 41 может обнаруживать несоответствия среди двух третьих сигналов путевой скорости и второго сигнала путевой скорости летательного аппарата 2 и идентифицировать ошибочный сигнал путевой скорости. Затем, в случае необходимости, третий модуль обнаружения и исключения неисправностей FDE3 41 позволяет исключить ошибочный сигнал путевой скорости.
Таким образом, пилотажное устройство 1 с датчиками обеспечивает непрерывность получения четвертого сигнала путевой скорости.
Работа этого третьего варианта выполнения аналогична работе второго варианта выполнения. Использование двух средств приема GNSS 11, 12 и двух инерциальных счетчиков 101, 102 текущих координат позволяет гарантировать доступность и достоверность четвертого сигнала путевой скорости летательного аппарата 2, в том числе в случае недоступности достоверного второго сигнала путевой скорости. Предпочтительно сравнение второго и третьих сигналов путевой скорости на уровне третьего модуля обнаружения и исключения неисправностей FDE3 41 позволяет обнаруживать аномалии на нескольких системах GNSS 100, 200, которые могли бы остаться незамеченными согласно второму варианту выполнения пилотажного устройства 1 с датчиками, например, такие как активные помехи или пассивные помехи. Надежность этого четвертого сигнала путевой скорости повышается и является достаточной для устройства содействия пилотированию летательного аппарата 2.
Наконец, пилотажное устройство 1 с датчиками использует стандартные компоненты, в частности, такие как два средства приема GNSS 11, 12 и два инерциальных счетчика 101, 102 текущих координат, что позволяет снизить его стоимость.
Естественно, в настоящее изобретение можно сносить изменения в плане его применения. Хотя выше были описаны несколько вариантов выполнения, понятно, что невозможно идентифицировать избыточно все возможные варианты. Можно, разумеется, заменить одно описанное средство эквивалентным средством, не выходя за рамки настоящего изобретения.
Изобретение относится к области спутниковой навигации. Техническим результатом является обнаружение достоверных и/или ошибочных сигналов, чтобы исключать каждую неисправную спутниковую систему навигации GNSS (100, 200, 300, 400). Объектом настоящего изобретения является пилотажное устройство (1) с датчиками, предназначенное для винтокрылого летательного аппарата (2), содержащее по меньшей мере два инерциальных модуля IMU (51, 52), по меньшей мере два средства приема GNSS (11, 12, 13, 14), оснащенных соответственно первым модулем обнаружения и исключения неисправностей FDE1 (21, 22) и охватывающих разные GNSS (100, 200, 300, 400), по меньшей мере два вторых модуля обнаружения и исключения неисправностей FDE2 (31), по меньшей мере две платформы (61, 62) гибридизации и по меньшей мере один третий модуль обнаружения и исключения неисправностей FDE3 (41). Модули обнаружения и исключения неисправностей FDE1, FDE2, FDE3 (21, 22, 31, 41) позволяют обнаруживать достоверные и/или ошибочные сигналы, чтобы исключать каждую неисправную систему GNSS (100, 200, 300, 400). Кроме того, каждая платформа (61, 62) гибридизации позволяет определять гибридную скорость относительно земли, чтобы выдать в конечном итоге точную и достоверную скорость упомянутого летательного аппарата (2). 4 н. и 11 з.п. ф-лы, 4 ил.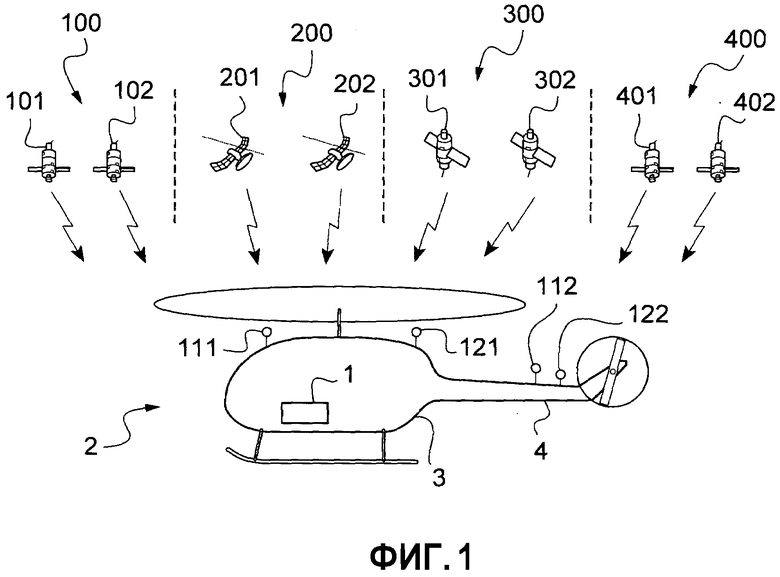
1. Пилотажное устройство (1) с датчиками, предназначенное для винтокрылого летательного аппарата (2) и содержащее
- средства приема GNSS (11, 12, 13, 14) группировок по меньшей мере двух независимых систем GNSS (100, 200, 300, 400), при этом упомянутые средства приема GNSS (11, 12, 13, 14) принимают первоначальные сигналы от нескольких спутников (101, 102, 201, 202, 301, 302, 401, 402),
- по меньшей мере один модуль обнаружения и исключения неисправностей FDE (21, 22, 31),
отличающееся тем, что
- каждый модуль обнаружения и исключения неисправностей FDE (21, 22, 31, 41) принимает по меньшей мере два входных сигнала и выдает выходной сигнал, при этом каждый выходной сигнал содержит измерение и состояние достоверности,
- каждое средство приема GNSS (11, 12, 13, 14) содержит один первый модуль обнаружения и исключения неисправностей FDE1 (21, 22) на каждую систему GNSS (100, 200, 300, 400),
- каждый первый модуль обнаружения и исключения неисправностей FDE (21, 22) принимает и анализирует упомянутые первоначальные сигналы и обнаруживает достоверные первоначальные сигналы и/или ошибочные первоначальные сигналы,
- каждое средство приема GNSS (11, 12, 13, 14) выдает измерение и состояние достоверности первого сигнала путевой скорости упомянутого летательного аппарата (2) в географической системе координат для по меньшей мере одной системы GNSS (100, 200, 300, 400) на основании упомянутых достоверных первоначальных сигналов, исключая упомянутые ошибочные первоначальные сигналы,
- упомянутое пилотажное устройство (1) с датчиками содержит по меньшей мере один второй модуль обнаружения и исключения неисправностей FDE2 (31), при этом каждый второй модуль обнаружения и исключения неисправностей FDE2 (31) находится на связи с по меньшей мере двумя из упомянутых средств приема GNSS (11, 12, 13, 14) и принимает, анализирует и сравнивает упомянутые первые сигналы путевой скорости, выдаваемые упомянутыми по меньшей мере двумя средствами приема GNSS (11, 12, 13, 14), обнаруживает достоверные первые сигналы путевой скорости и/или ошибочные первые сигналы путевой скорости, при этом каждый второй модуль обнаружения и исключения неисправностей FDE2 (31) обнаруживает и исключает каждую неисправную систему GNSS (100, 200, 300, 400), выдающую ошибочный первый сигнал путевой скорости, затем определяет и выдает измерение и состояние достоверности второго сигнала путевой скорости упомянутого летательного аппарата (2) на основании по меньшей мере двух достоверных первых сигналов путевой скорости.
2. Пилотажное устройство (1) с датчиками по п. 1, отличающееся тем, что упомянутое пилотажное устройство (1) с датчиками содержит по меньшей мере три независимые системы GNSS (100, 200, 300, 400) и каждый второй модуль обнаружения и исключения неисправностей FDE2 (31) находится на связи с по меньшей мере тремя из упомянутых средств приема GNSS (11, 12, 13, 14) и принимает, анализирует и сравнивает упомянутые первые сигналы путевой скорости, выдаваемые упомянутыми по меньшей мере тремя средствами приема GNSS (11, 12, 13, 14), обнаруживает достоверные первые сигналы путевой скорости и/или ошибочные первые сигналы путевой скорости, при этом каждый второй модуль обнаружения и исключения неисправностей FDE2 (31) обнаруживает и исключает каждую неисправную систему GNSS (100, 200, 300, 400), выдающую ошибочный первый сигнал путевой скорости, затем определяет и выдает измерение и состояние достоверности второго сигнала путевой скорости упомянутого летательного аппарата (2) на основании по меньшей мере двух достоверных первых сигналов путевой скорости, исключая упомянутые ошибочные первые сигналы путевой скорости.
3. Пилотажное устройство (1) с датчиками по любому из пп. 1, 2, отличающееся тем, что упомянутое пилотажное устройство (1) с датчиками содержит по меньшей мере один инерциальный модуль IMU (51, 52) и по меньшей мере одну платформу (61, 62) гибридизации, при этом
- каждый инерциальный модуль IMU (51, 52) выдает сигналы инерциальных измерений, характеризующие ускорения и угловые скорости упомянутого летательного аппарата (2),
- каждая платформа (61, 62) гибридизации находится на связи со вторым модулем обнаружения и исключения неисправностей FDE2 (31) и с инерциальным модулем IMU (51, 52),
- каждая платформа (61, 62) гибридизации принимает и обрабатывает упомянутые сигналы инерциальных измерений и второй сигнал путевой скорости, затем определяет и выдает измерение, представляющее собой третий сигнал путевой скорости упомянутого летательного аппарата (2), на основании упомянутых сигналов инерциальных измерений и достоверного второго сигнала путевой скорости, при этом упомянутый третий сигнал путевой скорости является чисто инерциальной путевой скоростью, когда упомянутая платформа (61, 62) гибридизации не принимает никакого достоверного второго сигнала путевой скорости, и гибридной путевой скоростью, когда упомянутая платформа (61, 62) гибридизации принимает достоверный второй сигнал путевой скорости, при этом упомянутый третий сигнал путевой скорости является постоянно доступным.
4. Пилотажное устройство (1) с датчиками по п. 3, отличающееся тем, что упомянутое пилотажное устройство (1) с датчиками содержит по меньшей мере две платформы (61, 62) гибридизации, по меньшей мере два инерциальных модуля IMU (51, 52) и по меньшей мере один третий модуль обнаружения и исключения неисправностей FDE3 (41), при этом платформа (61, 62) гибридизации и инерциальный модуль IMU (51, 52) образуют инерциальную цепь (71, 72), при этом каждый третий модуль обнаружения и исключения неисправностей FDE3 (41) находится на связи с по меньшей мере двумя платформами (61, 62) гибридизации, чтобы определять и выдавать четвертый сигнал путевой скорости, при этом каждый третий модуль обнаружения и исключения неисправностей FDE3 (41) принимает, анализирует и сравнивает упомянутые третьи сигналы путевой скорости, выдаваемые упомянутыми платформами (61, 62) гибридизации, и обнаруживает достоверные третьи сигналы путевой скорости и/или ошибочные третьи сигналы путевой скорости, при этом каждый третий модуль обнаружения и исключения неисправностей FDE3 (41) обнаруживает неисправность в инерциальной цепи (71, 72) и исключает упомянутую инерциальную цепь (71, 72) на основании упомянутых ошибочных третьих сигналов путевой скорости, затем определяет и выдает измерение и состояние достоверности упомянутого четвертого сигнала путевой скорости упомянутого летательного аппарата (2) на основании по меньшей мере двух достоверных третьих сигналов путевой скорости.
5. Пилотажное устройство (1) с датчиками по п. 4, отличающееся тем, что упомянутое пилотажное устройство (1) с датчиками содержит по меньшей мере три платформы (61, 62) гибридизации, по меньшей мере три инерциальных модуля IMU (51, 52), при этом каждый третий модуль обнаружения и исключения неисправностей FDE3 (41) находится на связи с по меньшей мере тремя платформами (61, 62) гибридизации, чтобы определять и выдавать четвертый сигнал путевой скорости, при этом каждый третий модуль обнаружения и исключения неисправностей FDE3 (41) принимает, анализирует и сравнивает упомянутые третьи сигналы путевой скорости, выдаваемые упомянутыми платформами (61, 62) гибридизации, и обнаруживает достоверные третьи сигналы путевой скорости и/или ошибочные третьи сигналы путевой скорости, при этом каждый третий модуль обнаружения и исключения неисправностей FDE3 (41) обнаруживает неисправность в инерциальной цепи (71, 72) и исключает упомянутую инерциальную цепь (71, 72) на основании упомянутых ошибочных третьих сигналов путевой скорости, затем определяет и выдает измерение и состояние достоверности упомянутого четвертого сигнала путевой скорости упомянутого летательного аппарата (2) на основании по меньшей мере двух достоверных третьих сигналов путевой скорости, исключая упомянутые ошибочные третьи сигналы путевой скорости.
6. Пилотажное устройство (1) с датчиками по п. 4, отличающееся тем, что каждый третий модуль обнаружения и исключения неисправностей FDE3 (41) находится на связи с по меньшей мере одним вторым модулем обнаружения и исключения неисправностей FDE2 (31), чтобы принимать, анализировать и сравнивать по меньшей мере один второй сигнал путевой скорости и упомянутые третьи сигналы путевой скорости, обнаруживать и локализовать достоверные вторые и/или третьи сигналы путевой скорости, а также ошибочные вторые и/или третьи сигналы путевой скорости, затем определять и выдавать измерение и состояние достоверности упомянутого четвертого сигнала путевой скорости упомянутого летательного аппарата (2) на основании по меньшей мере одного достоверного второго сигнала путевой скорости и/или по меньшей мере двух достоверных третьих сигналов путевой скорости, исключая упомянутые ошибочные вторые и/или третьи сигналы путевой скорости.
7. Пилотажное устройство (1) с датчиками по п. 4, отличающееся тем, что
- каждая платформа (61, 62) гибридизации содержит связанные между собой инерциальную виртуальную платформу (81,82) и два фильтра (91, 92) ошибок гибридизации, при этом одна инерциальная виртуальная платформа (81, 82) находится на связи с одним инерциальным модулем IMU (51, 52), образуя, таким образом, инерциальный счетчик (101, 102) текущих координат,
- упомянутое пилотажное устройство (1) с датчиками содержит два инерциальных счетчика (101, 102) текущих координат, вычислительное устройство (200) с двумя каналами (201, 202) вычисления и четыре фильтра ошибок гибридизации (91, 91’, 92, 92'), при этом каждый канал (201, 202) вычисления устанавливает связь фильтра (91, 91', 92, 92') ошибок гибридизации, с одной стороны, со вторым модулем обнаружения и исключения неисправностей FDE2 (31) и, с другой стороны, с третьим модулем обнаружения и исключения неисправностей FDE3 (41),
- каждый второй модуль обнаружения и исключения неисправностей FDE2 (31) находится на связи с двумя фильтрами (61, 62) ошибок гибридизации для каждого канала (201, 202) вычисления,
- каждый третий модуль обнаружения и исключения неисправностей FDE3 (41) находится на связи с двумя фильтрами (61, 62) ошибок гибридизации для каждого канала (201, 202) вычисления.
8. Пилотажное устройство (1) с датчиками по п. 4, отличающееся тем, что по меньшей мере один второй модуль обнаружения и исключения неисправностей FDE2 (31, 32) и/или по меньшей мере один третий модуль обнаружения и исключения неисправностей FDE3 (41, 42) использует(ют) метод определения по срединному значению.
9. Пилотажное устройство (1) с датчиками по любому из пп. 1, 2, отличающееся тем, что по меньшей мере одно средство приема GNSS (11, 12, 13, 14) содержит атомные часы (115, 125).
10. Пилотажное устройство (1) с датчиками по любому из пп. 1, 2, отличающееся тем, что упомянутые средства приема GNSS (11, 12, 13, 14) находятся на связи с системами GNSS (100, 200, 300, 400), выбранными из перечня, в который входят система GPS, система ГЛОНАСС, система GALILEO, система QZSS, системы BEIDOU, а также система IRIDIUM.
11. Способ определения путевой скорости летательного аппарата (2), отличающийся тем, что
- на первом этапе принимают первоначальные навигационные сигналы от нескольких спутников (101, 102, 201, 202), принадлежащих к группировкам по меньшей мере двух независимых систем GNSS (100, 200, 300, 400),
- на втором этапе анализируют упомянутые первоначальные сигналы для каждой системы GNSS (100, 200, 300, 400),
- на третьем этапе обнаруживают достоверные первоначальные сигналы и/или ошибочные первоначальные сигналы,
- на четвертом этапе выдают измерение и состояние достоверности по меньшей мере двух первых сигналов путевой скорости упомянутого летательного аппарата (2) в географической системе координат для по меньшей мере двух независимых систем GNSS (100, 200, 300, 400) на основании упомянутых достоверных первоначальных сигналов, исключая упомянутые ошибочные первоначальные сигналы,
- на пятом этапе анализируют и сравнивают упомянутые первые сигналы путевой скорости,
- на шестом этапе обнаруживают первые достоверные сигналы путевой скорости и/или первые ошибочные сигналы путевой скорости,
- на седьмом этапе обнаруживают и исключают каждую неисправную систему GNSS (100, 200, 300, 400), выдающую ошибочный первый сигнал путевой скорости, и
- на восьмом этапе определяют и выдают измерение и состояние достоверности второго сигнала путевой скорости упомянутого летательного аппарата (2) на основании по меньшей мере двух достоверных первых сигналов путевой скорости, исключая упомянутые ошибочные первые сигналы путевой скорости.
12. Способ определения путевой скорости летательного аппарата (2) по п. 11, отличающийся тем, что
- во время девятого этапа считывают сигналы инерциальных измерений, при этом упомянутые сигналы инерциальных измерений характеризуют ускорения и угловые скорости упомянутого летательного аппарата (2),
- на десятом этапе обрабатывают каждый второй сигнал путевой скорости и упомянутые сигналы инерциальных измерений,
- на одиннадцатом этапе определяют и выдают по меньшей мере одно измерение, представляющее собой по меньшей мере один третий сигнал путевой скорости упомянутого летательного аппарата (2), на основании упомянутых сигналов инерциальных измерений и второго достоверного сигнала путевой скорости, при этом упомянутый третий сигнал путевой скорости является доступным постоянно,
- на двенадцатом этапе анализируют и сравнивают упомянутые третьи сигналы путевой скорости,
- в ходе тринадцатого этапа обнаруживают достоверные третьи сигналы путевой скорости и/или ошибочные третьи сигналы путевой скорости и
- на четырнадцатом этапе определяют и выдают измерение и состояние достоверности четвертого сигнала путевой скорости упомянутого летательного аппарата (2) на основании по меньшей мере двух достоверных третьих сигналов путевой скорости, исключая упомянутые ошибочные третьи сигналы путевой скорости.
13. Способ определения путевой скорости летательного аппарата (2) по п. 11, отличающийся тем, что
- во время девятого этапа считывают сигналы инерциальных измерений, при этом упомянутые сигналы инерциальных измерений характеризуют ускорения и угловые скорости упомянутого летательного аппарата (2),
- на десятом этапе обрабатывают каждый второй сигнал путевой скорости и упомянутые сигналы инерциальных измерений,
- на одиннадцатом этапе определяют и выдают по меньшей мере одно измерение, представляющее собой по меньшей мере один третий сигнал путевой скорости упомянутого летательного аппарата (2), на основании упомянутых сигналов инерциальных измерений и второго достоверного сигнала путевой скорости, при этом упомянутый третий сигнал путевой скорости является доступным постоянно,
- на двенадцатом этапе анализируют и сравнивают по меньшей мере один второй сигнал путевой скорости и упомянутые третьи сигналы путевой скорости,
- на тринадцатом этапе обнаруживают и локализуют достоверные вторые сигналы путевой скорости и/или достоверные третьи сигналы путевой скорости, а также ошибочные вторые сигналы путевой скорости и/или ошибочные третьи сигналы путевой скорости и
- на четырнадцатом этапе определяют и выдают измерение и состояние достоверности четвертого сигнала путевой скорости упомянутого летательного аппарата (2) на основании по меньшей мере одного достоверного второго сигнала путевой скорости и/или по меньшей мере двух достоверных третьих сигналов путевой скорости, исключая ошибочные вторые и/или третьи сигналы путевой скорости.
14. Пилотажное устройство (1) с датчиками, предназначенное для винтокрылого летательного аппарата (2) и содержащее
- средства приема GNSS (11, 12, 13, 14) группировок по меньшей мере двух независимых систем GNSS (100, 200, 300, 400), при этом упомянутые средства приема GNSS (11, 12, 13, 14) принимают первоначальные сигналы от нескольких спутников (101, 102, 201, 202, 301, 302, 401, 402),
- по меньшей мере один модуль обнаружения и исключения неисправностей FDE (21, 22, 31),
отличающееся тем, что
- каждый модуль обнаружения и исключения неисправностей FDE (21, 22, 31, 41) принимает по меньшей мере два входных сигнала и выдает выходной сигнал, при этом каждый выходной сигнал содержит измерение и состояние достоверности,
- каждое средство приема GNSS (11, 12, 13, 14) содержит один первый модуль обнаружения и исключения неисправностей FDE1 (21, 22),
- каждый первый модуль обнаружения и исключения неисправностей FDE (21, 22) принимает и анализирует упомянутые первоначальные сигналы и обнаруживает достоверные первоначальные сигналы и/или ошибочные первоначальные сигналы,
- каждое средство приема GNSS (11, 12, 13, 14) выдает измерение и состояние достоверности первого сигнала путевой скорости упомянутого летательного аппарата (2) в географической системе координат для по меньшей мере одной системы GNSS (100, 200, 300, 400) на основании упомянутых достоверных первоначальных сигналов, исключая упомянутые ошибочные первоначальные сигналы,
- упомянутое пилотажное устройство (1) с датчиками содержит по меньшей мере один второй модуль обнаружения и исключения неисправностей FDE2 (31), при этом каждый второй модуль обнаружения и исключения неисправностей FDE2 (31) находится на связи с по меньшей мере двумя из упомянутых средств приема GNSS (11, 12, 13, 14) и принимает, анализирует и сравнивает упомянутые первые сигналы путевой скорости, выдаваемые упомянутыми по меньшей мере двумя средствами приема GNSS (11, 12, 13, 14), обнаруживает достоверные первые сигналы путевой скорости и/или ошибочные первые сигналы путевой скорости, при этом каждый второй модуль обнаружения и исключения неисправностей FDE2 (31) обнаруживает в таком случае и исключает каждую неисправную систему GNSS (100, 200, 300, 400), выдающую ошибочный первый сигнал путевой скорости, затем определяет и выдает измерение и состояние достоверности второго сигнала путевой скорости упомянутого летательного аппарата (2) на основании по меньшей мере двух достоверных первых сигналов путевой скорости.
15. Пилотажное устройство (1) с датчиками, предназначенное для винтокрылого летательного аппарата (2) и содержащее
- средства приема GNSS (11, 12, 13, 14) группировок по меньшей мере трех независимых систем GNSS (100, 200, 300, 400), при этом упомянутые средства приема GNSS (11, 12, 13, 14) принимают первоначальные сигналы от нескольких спутников (101, 102, 201, 202, 301, 302, 401, 402),
- по меньшей мере один модуль обнаружения и исключения неисправностей FDE (21, 22, 31),
отличающееся тем, что
- каждый модуль обнаружения и исключения неисправностей FDE (21, 22, 31, 41) принимает по меньшей мере два входных сигнала и выдает выходной сигнал, при этом каждый выходной сигнал содержит измерение и состояние достоверности,
- каждое средство приема GNSS (11, 12, 13, 14) содержит один первый модуль обнаружения и исключения неисправностей FDE1 (21, 22),
- каждый первый модуль обнаружения и исключения неисправностей FDE1 (21, 22) принимает и анализирует упомянутые первоначальные сигналы и обнаруживает достоверные первоначальные сигналы и/или ошибочные первоначальные сигналы,
- каждое средство приема GNSS (11, 12, 13, 14) выдает измерение и состояние достоверности первого сигнала путевой скорости упомянутого летательного аппарата (2) в географической системе координат для по меньшей мере одной системы GNSS (100, 200, 300, 400) на основании упомянутых достоверных первоначальных сигналов, исключая упомянутые ошибочные первоначальные сигналы,
- упомянутое пилотажное устройство (1) с датчиками содержит по меньшей мере один второй модуль обнаружения и исключения неисправностей FDE2 (31), по меньшей мере один инерциальный модуль (51, 52) и по меньшей мере одну платформу (61, 62) гибридизации, при этом
- каждый второй модуль обнаружения и исключения неисправностей FDE2 (31) находится на связи с по меньшей мере тремя из упомянутых средств приема GNSS (11, 12, 13, 14) и принимает, анализирует и сравнивает упомянутые первые сигналы путевой скорости, выдаваемые упомянутыми по меньшей мере тремя средствами приема GNSS (11, 12, 13, 14), обнаруживает достоверные первые сигналы путевой скорости и/или ошибочные первые сигналы путевой скорости, при этом каждый второй модуль обнаружения и исключения неисправностей FDE2 (31) обнаруживает в таком случае и исключает каждую неисправную систему GNSS (100, 200, 300, 400), выдающую ошибочный первый сигнал путевой скорости, затем определяет и выдает измерение и состояние достоверности второго сигнала путевой скорости упомянутого летательного аппарата (2) на основании по меньшей мере двух достоверных первых сигналов путевой скорости, исключая упомянутые ошибочные первые сигналы путевой скорости,
- каждый инерциальный модуль IMU (51, 52) выдает сигналы инерциальных измерений, характеризующие ускорения и угловые скорости упомянутого летательного аппарата (2),
- каждая платформа (61, 62) гибридизации находится на связи со вторым модулем обнаружения и исключения неисправностей FDE2 (31) и с инерциальным модулем IMU (51, 52),
- каждая платформа (61, 62) гибридизации принимает и обрабатывает упомянутые сигналы инерциальных измерений и второй сигнал путевой скорости, затем определяет и выдает измерение, представляющее собой третий сигнал путевой скорости упомянутого летательного аппарата (2), на основании упомянутых сигналов инерциальных измерений и достоверного второго сигнала путевой скорости, при этом упомянутый третий сигнал путевой скорости является чисто инерциальной путевой скоростью, когда упомянутая платформа (61, 62) гибридизации не принимает никакого достоверного второго сигнала путевой скорости, и гибридной путевой скоростью, когда упомянутая платформа (61, 62) гибридизации принимает достоверный второй сигнал путевой скорости, при этом упомянутый третий сигнал путевой скорости является в таком случае постоянно доступным.
| US 2008062041 A1, 13.03.2008 | |||
| RU 2013114354 A, 20.10.2014 | |||
| FR 2996647 A1, 11.04.2014 | |||
| WO 2009141519 A3, 14.01.2010 | |||
| БЫТОВОЙ ХОЛОДИЛЬНИК | 2007 |
|
RU2342609C1 |
| US 2011291887 A1, 01.12.2011. | |||

