Область техники, к которой относится изобретение
Изобретение относится к области носителей, использующих информацию, поступающую от навигационной спутниковой системы, которая использует измерения, передаваемые несколькими группировками спутников.
Более конкретно, изобретение относится к устройству спутникового позиционирования и способу для проверки достоверности информации позиционирования, выдаваемой таким устройством, с возможностью обнаружения и исключения двух одновременно отказавших спутников.
Уровень техники
Носители, такие как воздушные суда или иные суда, оборудуются различными навигационными системами. В число таких систем входит, в частности, гибридное оборудование INS/GNSS (от английских названий «Inertial Navigation System» - инерциальная навигационная система и «Global Navigation Satellite System» - глобальная навигационная спутниковая система, ГНСС).
Центральный инерциальный блок выдает информацию, содержащую малое количество шумов и обладающую высокой точностью на коротких промежутках времени. Однако в течение более длительных промежутков качество позиционирования при помощи центрального инерциального блока падает (более или менее быстро в зависимости от качества используемых датчиков, например, акселерометров или гироскопов, и способов обработки данных в центральном блоке). Данные, получаемые от навигационной спутниковой системы, в свою очередь, крайне мало подвержены ухудшению на длительных промежутках времени, но зачастую могут содержать значительное количество шумов и обладать переменной точностью. Кроме того, данные инерциальных измерений доступны всегда, в то время как информация GNSS может быть недоступна или поступать с помехами и искажениями.
Гибридизация состоит в комбинировании фрагментов информации, поступающих от центрального инерциального блока, и измерений, предоставляемых навигационной спутниковой системой, с целью получения информации о положении и скорости с использованием преимуществ обеих систем. Так, точность измерений, поступающих от приемника GNSS, позволяет устранять отклонения инерциальных данных, а содержащие малое количество шумов инерциальные измерения позволяют отфильтровывать шумы в измерениях приемника GNSS.
Известные модели измерений GNSS не учитывают возможные отказы спутников, которые могут влиять на часы или передаваемые эфемериды, причем такие отказы обычно приводят к возникновению отклонений или дрейфа в измерениях GNSS.
В связи с этим системы для проверки достоверности имеют целью обнаружение таких сбоев и исключение соответствующих спутников с целью повторного формирования навигационного решения, не содержащего невыявленных ошибок.
В гибридных навигационных системах INS/GNSS вероятность отказа двух спутников, принадлежащих к одной и той же группировке, меньше, чем опасность нарушения достоверности. Такое событие может быть отнесено к опасности нарушения достоверности, и системе необходимо иметь лишь средства обнаружения отказа одного из спутников. Тогда спутник, признанный отказавшим, может быть исключен из рассмотрения так, чтобы исключить искажение навигационного состояния отказом спутника.
Рост числа навигационных спутниковых группировок (например, GPS, Galileo, ГЛОНАСС) увеличивает количество спутников, которые могут быть использованы в гибридной навигационной системе INS/GNSS. Однако при этом вероятность одновременного отказа двух спутников перестает быть пренебрежимо малой по сравнению с опасностью нарушения достоверности.
Таким образом, будущие навигационные системы, которые будут предъявлять более высокие требования к достоверности данных, должны будут обладать способностью обнаружения и исключения более чем одного отказа спутников.
В то же время известные технологии проверки достоверности позволяют обнаружить лишь отказ одного спутника. Такие технологии не могут быть расширены на случай двойного отказа без чрезмерной загрузки вычислительных средств.
Статья «A GLR Algorithm to Detect and Exclude up to Two Simultaneous Range Failures in a GPS/Galileo/IRS Case» авторов A. Gerimus и A.C. Escher, ION GNSS 2007, описывает применение способа для обнаружения и исключения множества отказавших спутников на основе алгоритма GLR (Generalized Likehood Ratio, проверка обобщенного отношения правдоподобия) для обнаружения отказа двух спутников. Основные недостатки данного способа состоят в том, что в нем используется лишь один навигационный фильтр, и в том, что процедуру начинают с обнаружения спутника с наиболее серьезной неисправностью до обнаружения второго неисправного спутника, в результате чего возникают существенные ошибки навигационного решения. Кроме того, данный способ не позволяет устранять искажения навигационного решения, вызванные отказом первого спутника, что неизбежно влияет на способность обнаружения системой второго отказавшего спутника.
Раскрытие изобретения
Таким образом, существует потребность в способе, который может быть осуществлен с небольшой нагрузкой на вычислительные средства и обеспечивает возможность эффективного обнаружения и исключения нескольких отказавших спутников, а также корректировки воздействия отказов на навигационное решение.
Для решения поставленной задачи в соответствии с первым аспектом изобретения предлагается способ для проверки достоверности позиционной информации, поступающей от устройства спутникового позиционирования, содержащего набор фильтров Калмана, каждый из которых формирует навигационное решение на основе необработанных измерений сигналов, передаваемых спутниками, отличающийся тем, что включает в себя этапы, на которых для каждого из фильтров набора:
- (i) корректируют навигационное решение, сформированное данным фильтром с учетом оценки влияния отказа спутника на данное навигационное решение;
- (ii) вычисляют перекрестное отклонение, отражающее расхождение между наблюдением, соответствующим необработанному измерению со спутника, не используемого данным фильтром, и апостериорной оценкой указанного наблюдения в соответствии с навигационным решением, сформированным данным фильтром и скорректированным на этапе (i);
- (iii) производят статистическую проверку перекрестного отклонения, по результатам которой констатируют наличие или отсутствие отказа спутника, необработанное измерение которого данный фильтр не использует.
В соответствии с некоторыми предпочтительными, но не накладывающими каких-либо ограничений аспектами осуществления способа по изобретению:
- Этап (i) включает в себя:
- определение для каждого спутника, по меньшей мере, одного отношения правдоподобия между гипотезой наличия у данного спутника отказа определенного типа и гипотезой отсутствия отказа данного спутника;
- сравнение отношения правдоподобия, соответствующего отказу определенного типа, с пороговым значением и, если требуется, констатацию наличия такого отказа определенного типа;
- оценку влияния констатированного отказа на навигационное решение, сформированное данным фильтром;
- корректировку навигационного решения, сформированного данным фильтром, в соответствии с оценкой влияния констатированного отказа.
- Способ включает в себя вычисление для каждого спутника перекрестного отклонения и ковариации перекрестного отклонения, отражающего расхождение между наблюдением, соответствующим необработанному измерению со спутника, и апостериорной оценкой указанного наблюдения, сформированной фильтром Калмана, не использующим необработанное измерение с данного спутника, причем отношение правдоподобия определяют в соответствии с перекрестным отклонением и ковариацией перекрестного отклонения, поступающими от указанного фильтра Калмана, не использующего необработанное измерение со спутника, и на основе оценки влияния отказа определенного типа на указанное перекрестное отклонение.
- Влияние отказа определенного типа на указанное перекрестное отклонение оценивают путем определения на основе данных, поступающих от указанного фильтра Калмана, не использующего необработанное измерение со спутника, динамической матрицы отклонений, а также путем оценки амплитуды отказа данного типа в скользящем окне оценки, соответствующем заданному числу приращений указанного фильтра Калмана, не использующего необработанное измерение со спутника, причем динамическая матрица отклонений отражает связь между амплитудой отказа и расхождением перекрестного отклонения, вызванным данным отказом.
- Влияние отказа на навигационное решение оценивают путем определения на основе данных, поступающих от фильтра Калмана, формирующего навигационное решение, динамической навигационной матрицы и путем оценки амплитуды и ковариации отказа в скользящем окне оценки, соответствующем заданному числу приращений указанного фильтра Калмана, формирующего навигационное решение, причем динамическая навигационная матрица отражает связь между амплитудой неисправности и расхождением указанного навигационного решения, вызванным данным отказом.
- По результатам статистической проверки, производимой на этапе (iii), констатируют наличие отказа спутника, если перекрестное отклонение превышает пороговое значение, соответствующее 
- Перекрестное отклонение соответствует расхождению между псевдорасстоянием до спутника, поступившим от системы спутникового позиционирования, и апостериорной оценкой такого псевдорасстояния, определенной фильтром Калмана, не использующим псевдорасстояние, поступившее отданного спутника.
- Способ дополнительно может включать в себя этапы, на которых:
- блокируют спутник, для которого констатировано наличие отказа, так, что фильтры набора более не используют необработанные измерения указанного отказавшего спутника,
- исключают блокированный спутник, если по истечении заранее определенного периода после его блокировки статистическая проверка перекрестного отклонения всегда приводит к заключению об отказе указанного спутника, причем ни одна другая проверка перекрестного отклонения не указывает на отказ другого спутника.
- Для каждого из фильтров набора дополнительно производят статистическую проверку априорных отклонений каждого из спутников, используемых данным фильтром, причем в случае констатации наличия отказа нескольких спутников по результатам статистической проверки их перекрестных отклонений блокируют спутник, не используемый фильтром, который имеет наибольшее число априорных отклонений, результаты статистической проверки которых ниже порогового значения, в результате чего фильтры набора более не используют необработанные измерения указанного блокированного спутника.
- Каждый из фильтров набора формирует навигационное решение путем гибридизации инерциальных измерений и необработанных измерений сигналов, передаваемых спутниками.
В соответствии со вторым аспектом изобретения предлагается устройство спутникового позиционирования, содержащее набор фильтров Калмана, каждый из которых формирует навигационное решение на основе необработанных измерений сигналов, передаваемых спутниками, отличающееся тем, что содержит
- модуль адаптации, выполненный с возможностью оценки для каждого из фильтров набора влияния отказа спутника на навигационное решение, формируемое данным фильтром, и корректировки такого навигационного решения в соответствии с указанной оценкой влияния отказа в случае констатации наличия отказа;
- модуль определения отказа спутника, выполненный с возможностью
- вычисления для каждого из фильтров набора перекрестного отклонения, отражающего расхождение между наблюдением, соответствующим необработанному измерению со спутника, не используемого данным фильтром, и апостериорной оценкой указанного наблюдения по навигационному решению, сформированному данным фильтром Калмана и скорректированному модулем адаптации, и
- осуществления статистической проверки перекрестного отклонения для констатации наличия или отсутствия отказа спутника.
Краткое описание чертежей
Другие аспекты, задачи и преимущества настоящего изобретения станут ясны из нижеследующего подробного описания предпочтительных вариантов его осуществления, приведенного в качестве примера, не накладывающего каких-либо ограничений, со ссылками на прилагаемые чертежи. На чертежах:
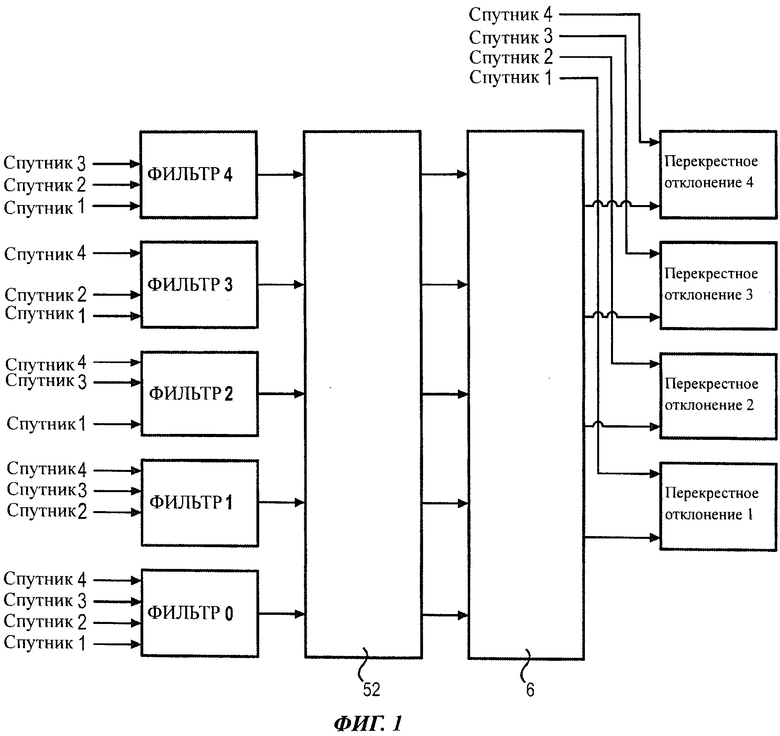
- на фиг.1 представлена схема, иллюстрирующая принцип работы изобретения в случае одновременного отказа двух спутников из четырех;
- на фиг.2 представлена схема, иллюстрирующая один из возможных вариантов осуществления устройства по второму аспекту изобретения.
Осуществление изобретения
В рамках настоящего изобретения отказавшим спутником (спутником с отказом) называют спутник, который передает в своих сообщениях ошибочные данные, вызывающие расхождение (постоянное или переменное) между его реальным положением и положением, приведенным в его сообщениях.
В соответствии с известными технологиями для защиты от возможного отказа спутника используют наборы фильтров Калмана. В контексте INS/GNSS такие фильтры осуществляют гибридизацию данных, поступающих от навигационной спутниковой системы, с данными, поступающими от центрального инерциального блока. Один из фильтров набора фильтров, называемый основным фильтром, использует все измерения GNSS, состоящие из псевдоизмерений и информации об их качестве. Остальные фильтры набора фильтров, называемые вторичными, используют лишь часть имеющихся измерений GNSS (как правило, все измерения GNSS за исключением измерений, поступающих от одного из спутников; все вторичные фильтры исключают при этом разные спутники).
В рамках настоящего изобретения такая архитектура в виде набора фильтров обладает следующими преимуществами.
В случае возникновения отказа спутника он не затрагивает тот вторичный фильтр, которые не получает измерения от данного спутника; таким образом, этот вторичный фильтр не подвержен влиянию отказа и не получает связанных с ним искажений.
Кроме того, в случае одновременного возникновения отказа двух спутников, два из вторичных фильтров набора (а именно, фильтры, исключающие измерения, поступающие от одного или другого отказавшего спутника) испытывают воздействие лишь одного отказа спутника.
На фиг.1 представлен набор фильтров Калмана, содержащий основной фильтр ФИЛЬТР 0, который использует измерения от четырех спутников, и четыре вторичных фильтра ФИЛЬТР 1, ФИЛЬТР 2, ФИЛЬТР 3 и ФИЛЬТР 4, каждый из которых исключает измерения от одного из спутников. В предположении о том, что спутники 1 и 4 одновременно отказали, ясно, что каждый из вторичных фильтров ФИЛЬТР 1 и ФИЛЬТР 4 испытывает воздействие лишь одного отказа спутника (соответственно, спутника 4 и спутника 1).
На фиг.2 представлено устройство спутникового позиционирования в соответствии с одним из возможных вариантов осуществления второго аспекта изобретения, предназначенное для установки на носителе, например, на воздушном судне. Устройство 1 использует данные, поступающие от центрального инерциального блока UMI и от нескольких навигационных спутниковых систем GNSS 1, GNNS j, GNSS р, и содержит одну виртуальную платформу 2 и набор 3 фильтров Калмана. Тем не менее, изобретение не ограничено навигационной системой INS/GNSS, но охватывает также и систему, использующую только навигационные системы типа GNSS.
Виртуальная платформа 2 получает приращения инерциальных величин, поступающие от датчиков (гироскопов, акселерометров) центрального инерциального блока UMI. Эти приращения инерциальных величин соответствуют, в частности, угловым приращениям и приращениям скорости. На основе этих приращений виртуальная платформа 2 вычисляет инерциальные навигационные данные (такие как высота, курс, скорость или положение носителя). Такие инерциальные навигационные данные названы в дальнейшем описании термином «инерциальные измерения PPVI».
Эти инерциальные измерения PPVI передаются модулю вычисления априорных псевдорасстояний (не представлен на фиг.1), который также получает данные о положении спутников. На основе, с одной стороны, инерциальных измерений и, с другой стороны, данных о положении спутников модуль вычисления априорных псевдорасстояний вычисляет априорные псевдорасстояния между носителем и различными спутниками, «видимыми» носителем.
Устройство 1 также получает псевдоизмерения расстояний между носителем и различными видимыми спутниками от различных группировок GNSS 1, GNSS j, GNSS р. Затем в соответствии с известными решениями вычисляют расхождения (называемые наблюдениями) между априорными псевдоизмерениями и псевдоизмерениями от каждой из группировок GNSS.
Набор 3 фильтров Калмана осуществляет гибридизацию инерциальных данных, поступающих от центрального инерциального блока UMI, и данных от навигационных спутниковых систем. Помимо выдачи на выход статистических данных по измерениям, фильтры обеспечивают поддержание виртуальной платформы 2 в линейной рабочей области, соответствующей области, моделируемой фильтром Калмана, путем оценки каждого из векторов dX0-dXn состояний (обычно содержащих порядка 30 компонент).
В соответствии с уже известными решениями набор 3 фильтров содержит несколько установленных параллельно фильтров Калмана. Один из этих фильтров называют основным фильтром 8 Калмана: он учитывает все наблюдения (получая для этого все измерения от системы GNSS) и вырабатывает основное гибридное навигационное решение.
Остальные фильтры 9i, 9n называют вторичными фильтрами: каждый из них учитывает лишь часть наблюдений, например, (n-1) наблюдений из n наблюдений, относящихся к n видимым спутникам, так, что i-й вторичный фильтр 9i Калмана получает от системы GNSS измерения всех спутников кроме i-го, причем каждый из вторичных фильтров формирует вторичное гибридное навигационное решение.
Следует отметить, что описанный выше процесс выработки наблюдений не является общим для всех фильтров набора 3, но каждый из фильтров осуществляет его по отдельности. Таким образом, вычисление априорных псевдорасстояний и вычисление вышеописанных наблюдений не являются общими для всех фильтров набора; для каждого из фильтров набора эти вычисления производит устройство 1 гибридизации по изобретению.
Устройство 1 выдает гибридный выходной сигнал Xref («опорное навигационное решение»), соответствующие инерциальным измерениям PPVI, вычисленным виртуальной платформой 2 и скорректированным вычитающим модулем 11 на вектор dC стабилизации, число компонент которого равно числу компонент векторов состояний, оцениваемых фильтрами Калмана.
Следует отметить, что в рамках устройства гибридизации с замкнутым контуром гибридный выходной сигнал Xref возвращают на вход виртуальной платформы 2.
Кроме того, как показано на фиг.1, вектор dC стабилизации может быть подан на вход всех фильтров набора фильтров. В таком случае, фильтры Калмана производят корректировку, вычитая из своей оценки (вектора dX состояния) поправку dC, что обеспечивает их согласованность с виртуальной платформой.
Устройство 1 дополнительно содержит модуль 4 формирования вектора dC стабилизации, два варианта осуществления которого, приведенные в качестве примера и не накладывающие каких-либо ограничений, описаны ниже.
В соответствии с первым из возможных вариантов осуществления поправки, применяемые к инерциальным измерениям, поступают от одного фильтра. Таким образом, все компоненты вектора dC стабилизации равны компонентам вектора состояний, оцененного фильтром Калмана, выбранным из фильтров набора 3. Выбор фильтра производят в модуле 4, например, в соответствии с решением по патентному документу EP 1801539 A путем выявления возможного отказа спутника.
В соответствии со вторым из возможных вариантов осуществления вектор dC стабилизации формируют покомпонентно, причем для каждой из компонент используют все фильтры Калмана. В таком случае, модуль 4 формирования вектора dC стабилизации выполнен с возможностью формирования каждой из компонент dC[état] вектора dC стабилизации в зависимости от всех соответствующих компонент dX0[état]-dXn[état] векторов dX0-dXn коррекции. Формирование каждой из компонент производят, например, в соответствии с решением по патентной заявке WO 2010070012, поданной заявителем по настоящей заявке.
Устройство 1 дополнительно содержит модуль 5 коррекции навигационного состояния, содержащий модуль 52 определения, выполненный с возможностью осуществления следующих этапов:
- определения для каждого спутника, по меньшей мере, одного отношения Ir, Ir′ правдоподобия между гипотезой наличия у спутника отказа определенного типа и гипотезой отсутствия отказа спутника,
- констатации наличия у спутника отказа определенного типа в соответствии с величиной отношения Ir, Ir′ правдоподобия, соответствующего данному отказу, и пороговым значением.
В оптимальном варианте для каждого спутника при каждом приращении фильтра Калмана в скользящем окне накопления определяют, по меньшей мере, одно отношение Ir, Ir′ правдоподобия, и констатируют наличие отказа определенного типа, если сумма отношений Ir, Ir′ правдоподобия, соответствующих такому отказу, в скользящем окне накопления превышает соответствующее пороговое значение.
Отношение правдоподобия отражает вероятность наличия отказа определенного типа, соответствующего данному отношению, у соответствующего спутника. Например, если отношение правдоподобия, соответствующее отказу определенного типа, положительно, вероятность наличия такого отказа у соответствующего спутника более высока. Чем выше отношение правдоподобия, тем больше вероятность наличия у соответствующего спутника отказа, соответствующего данному отношению.
Пороговое значение может быть одинаковым для нескольких спутников и/или для нескольких видов отказа; в альтернативном варианте пороговые значения для всех спутников и всех видов отказа могут быть различными, так что каждое отношение правдоподобия или, в оптимальном варианте, каждую сумму отношений правдоподобия сравнивают с соответствующим индивидуальным пороговым значением.
Размер скользящего окна накопления может быть различным в зависимости от вида отказа; в альтернативном варианте может быть использован единый размер скользящего окна.
Как будет более подробно описано ниже, модуль 5 определения и исключения отказа спутника также выполняет функцию обработки и исключения измерений GNSS для их контроля. Так, в варианте осуществления, представленном на фиг.1, модуль 5 определения и исключения содержит модуль 53 обработки спутниковых сигналов, который принимает измерения GNSS и направляет эти данные на различные фильтры набора 3 в соответствии с текущей ситуацией (отказавших спутников не обнаружено; исключение одного из спутников, признанного отказавшим). Как будет более подробно описано ниже, модуль 5 определения и исключения также может использовать для этой цели результаты проверок перекрестных отклонений, произведенных модулем 7 определения отказа спутника, а также результаты проверок, произведенных модулем 52 определения.
В оптимальном варианте модуль 53 обработки спутниковых сигналов осуществляет предварительный отбор измерений GNSS для дальнейшего использования с целью оптимизации работы системы и ограничения числа рассматриваемых измерений. Действительно, даже если использование всех измерений позволяет получить оптимальную эффективность, отбор n измерений (где число n равно числу вторичных фильтров, каждый из которых использует n-1 измерений GNSS) в разных группировках GPS, Galileo, ГЛОНАСС и т.д. с минимизацией различных критериев точности (например, DOP - Dilution Of Precision, или снижение точности, EHE - Expected Horizontal Error, или ожидаемая погрешность по горизонтали, EVE - Expected Vertical Error, или ожидаемая погрешность по вертикали) позволяет обеспечить на выходе эффективность работы, более высокую, чем при использовании лишь одной группировки, и достаточную для решения поставленной задачи.
Устройство 1 также содержит модуль 6 адаптации, выполненный с возможностью осуществления для каждого из фильтров набора этапов:
- оценки влияния отказа спутника на гибридное навигационное решение, формируемое данным фильтром, и
- корректировки навигационного решения в соответствии с оценкой влияния отказа в случае констатации такого отказа.
Таким образом, функция модуля 6 адаптации состоит в оценке расхождений ΔX, ΔX1, …, ΔXn которые отказ производит в гибридных навигационных решениях, сформированных фильтрами Калмана 8, 9i, …, 9n, и в корректировке гибридных навигационных решений, например, при помощи набора вычитающих модулей 10. Однако настоящее изобретение не ограничено архитектурой, представленной на фиг.1, так как в альтернативных вариантах осуществления оценка влияния отказа на гибридные навигационные решения может быть произведена фильтрами Калмана, модулем 52 определения или любыми другими средствами, известными специалистам в данной области.
Следует отметить, что модули 5 и 6 аналогичны модулям, описанным в патентной заявке, поданной во Франции заявителем по настоящей заявке 10 июля 2009 г. под №0954849.
Ниже следует описание способов вычислений, разработанных заявителем и описанных ранее в упомянутой патентной заявке FR 0954849, которые используют для определения отношений правдоподобия и влияния отказа на гибридное навигационное решение. Данные формулы приведены в качестве примера и не накладывают каких-либо ограничений на изобретение.
В оптимальном варианте отношения правдоподобия определяют на основе данных, получаемых от фильтров Калмана и содержащих, в частности, отклонения и ковариации отклонений, а также оценки влияния отказа определенного типа на такие отклонения.
Под отклонением понимают расхождение между априорным наблюдением фильтра Калмана и апостериорной оценкой этого наблюдения, сформированной фильтром.
Таким образом, каждый из фильтров выдает n отклонений, по числу спутников в группировке.
В частности, «перекрестным отклонением» называют отклонение, выдаваемое каждым из вторичных фильтров 9i Калмана и соответствующее расхождению между априорным наблюдением от спутника, данных которого данный вторичный фильтр 9i не получает, и апостериорной оценкой этого наблюдения. Таким образом, набор фильтров Калмана выдает n∙(n+1) отклонений, n из которых представляют собой перекрестные отклонения.
В оптимальном варианте модуль 5 определения и исключения отказа спутника содержит модуль 51 отбора отклонений, выполненный с возможностью отбора отклонений (как перекрестных, так и других) и ковариации отклонений и их передачи модулю 52, вычисляющему отношения правдоподобия.
В оптимальном варианте модуль 51 выполнен с возможностью передачи перекрестных отклонений или классических отклонений в модуль 52 для вычисления отношений правдоподобия. Преимущество использования перекрестных отклонений вместо проверок классических отклонений состоит в том, что фильтр, который позволяет проверить состояние отказавшего спутника, сам не испытывает влияния данного отказа.
А именно, i-й вторичный фильтр 9i Калмана получает от системы GNSS измерения всех спутников кроме i-го и формирует вектор состояний dXi независимо от i-го спутника, в результате чего возможный отказ i-го спутника не оказывает влияния на данный фильтр 9i.
Перекрестное отклонение спутника соответствует, например, расхождению между псевдорасстоянием до данного спутника, поступившим от системы спутникового позиционирования, и апостериорной оценкой этого псевдорасстояния, выданной фильтром Калмана, который не использует псевдорасстояние, поступившее от этого спутника, что обеспечивает независимость такой оценки от данного спутника. Таким образом, вычисление отношения правдоподобия не будет искажено отказом, в частности, «медленным» отказом данного спутника.
Следует уточнить, что в общем случае понятие перекрестного отклонения может быть использовано в приложении к любому необработанному измерению, например, к измерению псевдоскорости (также называемому допплеровским измерением).
Отношение Ir правдоподобия, соответствующее отказу определенного типа, предпочтительно определяют для некоторого момента t времени для каждого спутника по следующей формуле:

где:
- εt - отклонение (классическое или, в оптимальном варианте, перекрестное) фильтра 9i Калмана в момент t,
- St - ковариация отклонения в момент t, и
- ρt - расхождение, вызванное отказом, в указанном отклонении в момент t.
- Символ T обозначает транспонирование матрицы или вектора.
- Величина ρt неизвестна, но может быть оценена в скользящем окне оценки.
В предпочтительном варианте параллельно оценивают вызванное отказом расхождение гибридного навигационного решения, формируемого указанным фильтром Калмана; такое расхождение в дальнейшем обозначено символом βt. Такие оценки могут быть произведены по следующим формулам:
где:
- Ut - оценка амплитуды отказа,
- φt - динамическая матрица отклонения, выражающая связь между амплитудой отказа и расхождением, которое данный отказ вызывает в отклонении, и
- µt - динамическая навигационная матрица, выражающая связь между амплитудой отказа и расхождением, которое данный отказ вызывает в гибридном навигационном решении.
В оптимальном варианте модуль 52 определения вычисляет обе динамические матрицы для момента t на основе данных, поступающих от указанного фильтра Калмана, предпочтительно рекурсивным образом, т.е. вычисляя φt и µt для каждого момента t в зависимости от φt-1 и µt-1.
Указанные данные, поступающие от фильтра Калмана, могут включать коэффициент усиления фильтра Калмана и матрицы перехода и наблюдений.
Оценку амплитуды отказа в оптимальном варианте производят в скользящем окне оценки, соответствующем определенному числу N приращений фильтра Калмана.
В соответствии с оптимальным альтернативным вариантом осуществления оценка может быть произведена путем оценки методом наименьших квадратов в скользящем окне оценки, предпочтительно в соответствии со следующей формулой:

В оптимальном варианте заданное число N приращений фильтра Калмана соответствует длительности, меньшей заранее определенной длительности Т определения. В частности, если δ - период приращения фильтра Калмана, скользящее окно оценки должно удовлетворять условию: N·δ≤T.
Такое скользящее окно оценки в оптимальном варианте равно окну накопления отношений правдоподобия, соответствующих данному отказу.
Использование такого промежутка для выявления неисправности позволяет сократить размеры скользящего окна оценки, тем самым ограничивая нагрузку на вычислительные средства.
В случае констатации отказа спутника оценка расхождений гибридного навигационного решения, сформированного каждым из фильтров 9i Калмана, вычисленных модулем 6 в момент t равна:
где величина βt вычислена на основе отклонения, использующего априорное наблюдение спутника, признанного отказавшим. Модуль 51 отбора отклонений в оптимальном варианте выполнен так, что в данном случае передает модулю 52 определения и модулю 6 адаптации только такие отклонения. Таким образом, отбор отклонений позволяет оценить влияние выявленного отказа на основе отклонений, используя информацию, поступающую от спутника, признанного отказавшим.
Кроме того, расхождение ковариации Pi ошибки, связанной с гибридным навигационным решением, формируемым фильтром 9i Калмана, оценивают по следующей формуле:
где 

Модуль 52 определения предпочтительно выполнен с возможностью накопления отношений правдоподобия для каждого спутника и для каждого типа отказа в рамках скользящего окна накопления. Вычитание оценок влияния отказа на гибридные навигационные решения, вырабатываемые фильтрами, производят при помощи набора вычитающих модулей 10.
В соответствии с оптимальным альтернативным вариантом осуществления для каждого из спутников определяют два отношения Ir, Ir′ правдоподобия, где одно отношение Ir соответствует гипотезе о наличии отказа типа смещения, а второе отношение Ir′ - гипотезе о наличии отказа типа наклона.
В частности, динамическая матрица отклонения, определенная для каждого приращения фильтра Калмана, будет различной для отказов типа смещения и типа наклона. Таким образом, отношения Ir и Ir′ правдоподобия для каждого из спутников различны.
Таким образом, изобретение обеспечивает возможность различения отказов типа смещения и типа наклона.
В случае выявления отказа типа смещения этап оценки влияния такого отказа на гибридное навигационное решение в оптимальном варианте осуществляют в скользящем окне оценки, начиная с момента констатации наличия отказа типа смещения. Таким образом, в случае выявления отказа типа смещения скользящее окно оценки оставляют активным в течение заранее определенного промежутка времени, достаточного для оценки характеристик отказа.
В оптимальном варианте оценку характеристик отказа типа смещения производят с учетом момента возникновения отказа, т.е. момента, в который сумма отношений правдоподобия, соответствующих отказу типа смещения, превысила соответствующее пороговое значение. Исключение измерений модулем 53 производят только после этой оценки.
В случае выявления отказа типа наклона оценку влияния отказа на гибридное навигационное решение предпочтительно производят в скользящем окне оценки, предшествующем моменту констатации наличия отказа типа наклона.
В оптимальном варианте, если несколько сумм отношений Ir, Ir′ правдоподобия превышают соответствующие пороговые значения, модуль 52 определения констатирует наличие одного отказа. Этот отказ соответствует наибольшей из сумм отношений правдоподобия из всех отказов, выявленных для всех спутников.
Так, если отказ может быть констатирован для двух спутников, констатируют только наличие наиболее вероятного отказа, а если могут быть констатированы два отказа разных типов, констатируют только наличие наиболее вероятного отказа.
В предположении о наличии одновременных отказов у спутниках 1 и 4 выше было показано, что каждый из вторичных фильтров ФИЛЬТР 1 и ФИЛЬТР 4, исключающих измерения, поступающие со спутников 1 или 4, испытывает влияние лишь одного из отказов спутников. Таким образом, гибридное навигационное решение, формируемое каждым из этих фильтров, корректируют, как было указано выше, на влияние единственного отказа спутника, влияющего на него. В результате для каждого из этих фильтров, испытывающих влияние единственного отказа спутника, получают неискаженное навигационное решение.
Устройство 1 дополнительно содержит модуль 7 определения и исключения отказа спутника, выполненный с возможностью осуществления этапов:
- вычисления для каждого из фильтров набора перекрестного отклонения, отражающего расхождение между наблюдением, соответствующим необработанному измерению со спутника, который данный фильтр не использует, и апостериорной оценкой указанного наблюдения по навигационному решению, сформированному фильтром и скорректированному модулем 6 адаптации при помощи вычитающего модуля 10 так, что такая оценка независима от проверяемого спутника,
- осуществления статистической проверки перекрестного отклонения для констатации наличия или отсутствия отказа данного спутника.
Следует отметить, что данный модуль 7 соответствует описанию, приведенному в патентной заявке, поданной заявителем во Франции 24 марта 2009 г. под №0951894.
В примере по фиг.1 два фильтра ФИЛЬТР 1 и ФИЛЬТР 4, каждый из которых исходно затронут одним отказом спутника, после корректировки при помощи модуля 6 адаптации выдают неискаженные навигационные решения. В таком случае, эти два фильтра позволяют создать две проверки перекрестных отклонений, обеспечивающие возможность выявления и непосредственной идентификации двух отказавших спутников.
В оптимальном варианте осуществления настоящее изобретение, таким образом, сочетает преимущества способов, предложенных в патентных заявках FR 0954849 и FR 0951894, используя возможность адаптации навигационного состояния в случае отказа спутника в соответствии со способом, предложенным в документе FR 0954849, для обеспечения формирования перекрестного отклонения для отказавшего спутника на основе неискаженного (т.е. не испытывающего влияния отказа) фильтра. Действительно, в архитектуре набора фильтров присутствуют два фильтра, каждый из которых взаимодействует лишь с одним отказавшим спутником; применение адаптации состояния, предложенной в документе FR 0954849, дает возможность поддержания этих двух фильтров в рабочей области, близкой к области состояния отсутствия отказа, что позволяет обеспечить возможность идентификации двух отказавших спутников путем интерпретации проверки перекрестного отклонения по способу из документа FR 0951894.
Следует отметить, что настоящее изобретение не ограничено определением и исключением двух одновременных отказов спутников, но также применимо и к определению и исключению множественных одновременных отказов спутников при условии, что набор фильтров содержит фильтры, каждый из которых затронут лишь одним из нескольких отказов спутников. Например, в случае одновременного отказа трех спутников в наборе фильтров, состоящем из вторичных фильтров, каждый из которых использует n-2 измерений GNSS из n имеющихся измерений, можно найти вторичные фильтры, каждый из которых затронут лишь одним из трех отказов. После адаптации навигационное решение, формируемое такими фильтрами, будет неискаженным, что обеспечивает возможность интерпретации проверки перекрестного отклонения.
Для осуществления определения и исключения отказов спутников на основе проверок перекрестных отклонений спутников, используемых и не используемых в момент гибридизации каждым из фильтров набора фильтров, используют способы вычислений, разработанные заявителем и уже описанные в патентной заявке FR 0951894.
Каждый фильтр, не использующий один из спутников, производит проверку отклонения этого спутника (называемого перекрестным отклонением) от положения, выработанного данным фильтром и скорректированного в результате адаптации. Таким образом, отказ спутника можно выявить, не используя самого отказавшего спутника. Преимущество по сравнению с известными способами проверки отклонений состоит в том, что фильтр, который позволяет проверить отказавший спутник, не испытывает искажающего влияния его отказа.
Действительно, i-й вторичный фильтр 9i Калмана получает от системы GNSS (возможно, через корректирующий модуль 5) измерения всех спутников кроме i-го и, таким образом, формирует вектор dXi состояний независимо от i-го спутника, в результате чего возможный отказ i-го спутника не влияет на этот фильтр 9i.
Перекрестное отклонение спутника соответствует, например, расхождению между псевдорасстоянием PRi до данного спутника, выдаваемым системой спутникового позиционирования, и апостериорной оценкой 

Следует уточнить, что в общем случае перекрестное отклонение может быть применено к любому необработанному измерению, например, к измерению псевдоскорости (также называемому допплеровским измерением).
Возвращаясь к примеру применения перекрестного отклонения к псевдорасстоянию, обозначим символом Innoi перекрестное отклонение спутника с индексом i:

где
- H - модель наблюдения фильтра Калмана,
- Xi - реальное (неизвестное) положение носителя,
- 
Линеаризация предыдущего уравнения путем разложения матрицы H наблюдения в первом порядке дает: 

Поскольку статистическое распределение ошибки 
Таким образом, спутник признают отказавшим, если значение его перекрестного отклонения превышает вышеописанное пороговое значение. Возвращаясь к примеру по фиг.1 (одновременного отказа спутников 1 и 4), в связи с этим следует отметить, что расхождение перекрестных отклонений, формируемых для спутников 1 и 4, затронутых отказами, происходит быстрее, чем для спутников 2 и 3, не затронутых отказами.
Для выполнения функции исключения модуль 7 может быть дополнительно выполнен с возможностью:
- блокировки спутника, признанного отказавшим, во избежание использования необработанных измерений указанного отказавшего спутника фильтрами набора,
- исключения такого блокированного спутника, если по истечении заранее определенного периода ТЕ после его блокировки проверка перекрестного отклонения указанного спутника всегда приводит к заключению о его отказе, причем ни одна из других проверок перекрестных отклонений не свидетельствует об отказе других спутников.
Таким образом, в случае выявления отказа одного из спутников наблюдение за таким спутником продолжают в течение периода ТЕ. После этого все фильтры не используют такой спутник, имеющий, например, индекс i, однако фильтр 9i, который не участвует в гибридизации, продолжает его проверять посредством проверки перекрестного отклонения (блокировка спутника как имеющего возможный отказ никак не изменяет работу фильтра 9i, который не использует этот спутник). Преимущество блокировки спутника как имеющего возможный отказ в процессе исключения состоит в том, что при отсутствии неоднозначности в выборе исключаемого спутника его, таким образом, исключают с начала периода ТЕ (т.е. с момента выявления отказа). Таким образом, длительность периода ТЕ в большинстве случаев не влияет на работоспособность устройства гибридизации.
В соответствии с одним из возможных вариантов осуществления изобретения в случае констатации отказа другого спутника в течение периода ТЕ спутник, ранее блокированный как отказавший, объявляют исправным, в результате чего фильтры набора снова начинают использовать его данные, а блокируют новый отказавший спутник. Таким образом, если, несмотря на блокировку первого спутника, другое перекрестное отклонение превышает пороговое значение (что противоречит гипотезе о том, что отказал именно первый спутник), осуществляют смену гипотезы об отказавшем спутнике.
В соответствии с другим возможным вариантом осуществления изобретения для каждого из фильтров набора также производят статистическую проверку априорных отклонений каждого из спутников, используемых данным фильтром. Например, для спутников, используемых каждым из фильтров, могут производить проверку на соответствие отклонений распределению Гаусса (с ограничением вероятностью β).
Такие проверки так называемых классических отклонений могут помочь в выборе фильтра, не использующего отказавший спутник, если несколько из перекрестных отклонений превышают пороговое значение. Действительно, отказ одного спутника может одновременно искажать положение одного или нескольких из использующих его фильтров настолько, что их перекрестные отклонения также превысят пороговое значение. Таким образом, необходимо отобрать нужный спутник из нескольких возможных спутников для блокировки. В данном варианте осуществления изобретения выбор спутника для блокировки в качестве отказавшего облегчают путем учета проверки классических отклонений, которые помогают оценить достоверность каждого из фильтров. Наибольшей достоверностью обладает тот фильтр, наибольшее число отклонений которого не превышают порогового значения.
Таким образом, если в результате статистической проверки перекрестных отклонений несколько спутников признают отказавшими, в качестве отказавшего блокируют спутник, не используемый фильтром, наибольшее число априорных отклонений которого по результатам статистической проверки не превышают порогового значения, в результате чего фильтры набора более не используют необработанные измерения указанного блокированного спутника.
Также возможна ситуация, в которой в результате статистической проверки несколько спутников признаны отказавшими, причем несколько фильтров, не использующих эти спутники, имеют одинаковое наибольшее число априорных отклонений, которые по результатам статистической проверки не превышают порогового значения.
В таком случае, в качестве спутника, который блокируют, может быть выбран спутник, нормированное перекрестное отклонение которого имеет наибольшее абсолютное значение, путем передачи результатов проверок перекрестных отклонений в модуль 53 обработки спутниковых сигналов. В альтернативном варианте, представленном также на фиг.2, такой выбор также может быть произведен модулем 53 обработки спутниковых сигналов в результате рассмотрения результатов проверок, сформированных модулем 52 определения.
В соответствии с другим аспектом изобретения, в случае констатации отказа одного из спутников может быть произведена частичная реинициализация (сброс) фильтров набора, использующих исключенный спутник, в частности, путем повторной инициализации состояний, связанных с измерениями, полученными от системы GNSS, и состояний, связанных с другими используемыми датчиками (например, барометром), и десенсибилизации состояний, затронутых отказом, путем добавления шума с тем, чтобы свести соответствующие фильтры к неискаженному решению, если тот спутник, для которого констатировано наличие отказа, действительно отказал.
Следует отметить, что такая реинициализация может быть произведена в случае констатации отказа одного из спутников или в случае изменения идентификации отказавшего спутника в течение периода ТЕ.
В альтернативном варианте реинициализация фильтров набора может быть произведена при посредстве модуля 6 адаптации, который в таком случае скорректирует влияние констатированного отказа, используя результаты проверок перекрестных отклонений, полученные от модуля 7 определения отказа спутника, причем такие результаты проверок перенаправляют для этого в модуль 51 выбора отклонений, как показано на фиг.2.
Настоящее изобретение обладает, в частности, следующими преимуществами.
Архитектура набора фильтров соответствует известным решениям:
отсутствует необходимость добавления дополнительного набора фильтров для обеспечения возможности выявления двух одновременных отказов спутников.
Для интеграции измерений нескольких группировок GNSS используется всего один фильтр.
Использование проверок перекрестных отклонений обеспечивает возможность идентификации отказавших спутников.
Адаптация обеспечивает возможность подавления искажений навигационного состояния без полной реинициализации набора фильтров.
Изобретение относится к радиотехнике и может использоваться для проверки достоверности позиционной информации. Технический результат состоит в повышении точности определения позиционной информации. Для этого устройство спутникового позиционирования (GNSS) содержит набор (3) фильтров Калмана, включает в себя этапы, на которых для каждого из фильтров набора: корректируют навигационное решение, сформированное данным фильтром, с учетом оценки влияния отказа спутника на данное навигационное решение; вычисляют перекрестное отклонение, отражающее расхождение между наблюдением, соответствующим необработанному измерению со спутника, не используемого данным фильтром, и апостериорной оценкой указанного наблюдения в соответствии с навигационным решением, сформированным данным фильтром и производят статистическую проверку перекрестного отклонения, по результатам которой констатируют наличие или отсутствие отказа спутника, необработанное измерение которого данный фильтр не использует. 2 н. и 9 з.п. ф-лы, 2 ил.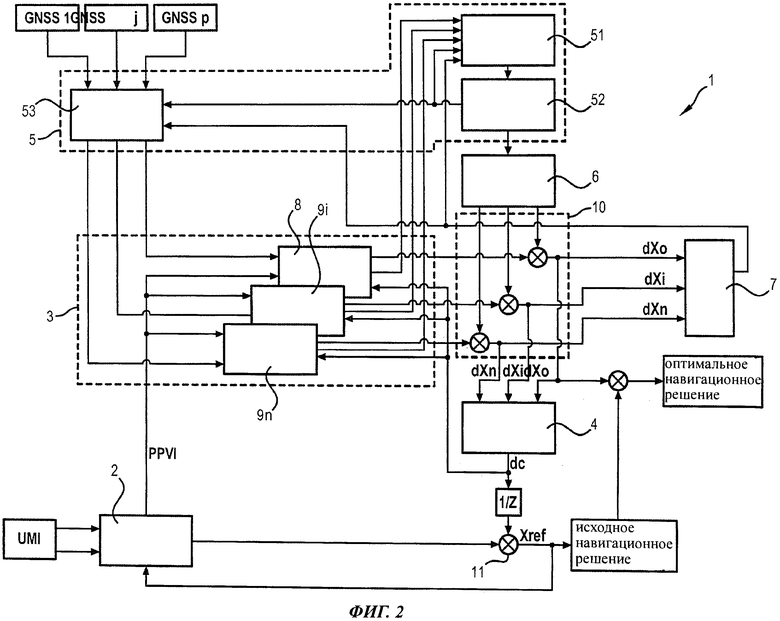
1. Способ для проверки достоверности позиционной информации, поступающей от устройства (1) спутникового позиционирования (GNSS), содержащего набор (3) фильтров Калмана, каждый из которых формирует навигационное решение (dX0, dXi, dXn) на основе необработанных измерений сигналов, передаваемых спутниками, отличающийся тем, что включает в себя этапы, на которых для каждого из фильтров набора:
- (i) корректируют навигационное решение, сформированное данным фильтром, с учетом оценки влияния отказа спутника на данное навигационное решение;
- (ii) вычисляют перекрестное отклонение, отражающее расхождение между наблюдением, соответствующим необработанному измерению со спутника, не используемого данным фильтром, и апостериорной оценкой указанного наблюдения в соответствии с навигационным решением, сформированным данным фильтром и скорректированным на этапе (i);
- (iii) производят статистическую проверку перекрестного отклонения, по результатам которой констатируют наличие или отсутствие отказа спутника, необработанное измерение которого данный фильтр не использует.
2. Способ по п.1, отличающийся тем, что этап (i) включает в себя:
- определение для каждого спутника, по меньшей мере, одного отношения (Ir, Ir′) правдоподобия между гипотезой наличия у данного спутника отказа определенного типа и гипотезой отсутствия отказа данного спутника;
- сравнение отношения (Ir, Ir′) правдоподобия, соответствующего отказу определенного типа, с пороговым значением, и если требуется, констатацию наличия такого отказа определенного типа;
- оценку влияния констатированного отказа на навигационное решение, сформированное данным фильтром;
- корректировку навигационного решения, сформированного данным фильтром, в соответствии с оценкой влияния констатированного отказа.
3. Способ по п.2, отличающийся тем, что включает в себя вычисление для каждого спутника перекрестного отклонения и ковариации перекрестного отклонения, отражающего расхождение между наблюдением, соответствующим необработанному измерению со спутника, и апостериорной оценкой указанного наблюдения, сформированной фильтром Калмана, не использующим необработанное измерение с данного спутника, причем отношение (Ir, Ir′) правдоподобия определяют в соответствии с перекрестным отклонением и ковариацией перекрестного отклонения, поступающими от указанного фильтра Калмана, не использующего необработанное измерение со спутника, и на основе оценки влияния отказа определенного типа на указанное перекрестное отклонение.
4. Способ по п.3, отличающийся тем, что влияние отказа определенного типа на указанное перекрестное отклонение оценивают путем определения на основе данных, поступающих от указанного фильтра Калмана, не использующего необработанное измерение со спутника, динамической матрицы отклонений, а также путем оценки амплитуды отказа данного типа в скользящем окне оценки, соответствующем заданному числу (N) приращений указанного фильтра Калмана, не использующего необработанное измерение со спутника, причем динамическая матрица отклонений отражает связь между амплитудой отказа и расхождением перекрестного отклонения, вызванным данным отказом.
5. Способ по любому из пп.1-4, отличающийся тем, что влияние отказа на навигационное решение оценивают путем определения на основе данных, поступающих от фильтра Калмана, формирующего навигационное решение, динамической навигационной матрицы и путем оценки амплитуды и ковариации отказа в скользящем окне оценки, соответствующем заданному числу приращений указанного фильтра Калмана, формирующего навигационное решение, причем динамическая навигационная матрица отражает связь между амплитудой отказа и расхождением указанного навигационного решения, вызванным данным отказом.
6. Способ по любому из пп.1-4, отличающийся тем, что по результатам статистической проверки, производимой на этапе (iii), констатируют наличие отказа спутника, если перекрестное отклонение превышает пороговое значение,
соответствующее (H·Pi·HT+Ri)∙α, где H - матрица наблюдений фильтра Калмана, Pi - матрица апостериорной оценки ковариации ошибки, Ri - матрица ковариации шумов измерения, а α - коэффициент, значение которого устанавливают в зависимости от вероятности ложного определения.
7. Способ по любому из пп.1-4, отличающийся тем, что перекрестное отклонение соответствует расхождению между псевдорасстоянием до спутника, поступившим от системы спутникового позиционирования, и апостериорной оценкой такого псевдорасстояния, определенной фильтром Калмана, не использующим псевдорасстояние, поступившее от данного спутника.
8. Способ по любому из пп.1-4, отличающийся тем, что дополнительно содержит этапы, на которых:
- блокируют спутник, для которого констатировано наличие отказа, так, что фильтры набора более не используют необработанные измерения указанного отказавшего спутника,
- исключают блокированный спутник, если по истечении заранее определенного периода после его блокировки статистическая проверка перекрестного отклонения всегда приводит к заключению об отказе указанного спутника, причем ни одна другая проверка перекрестного отклонения не указывает на отказ другого спутника.
9. Способ по любому из пп.1-4, отличающийся тем, что для каждого из фильтров набора дополнительно производят статистическую проверку априорных отклонений каждого из спутников, используемых данным фильтром, причем в случае констатации наличия отказа нескольких спутников по результатам статистической проверки их перекрестных отклонений блокируют спутник, не используемый фильтром, который имеет наибольшее число априорных отклонений, результаты статистической проверки которых ниже порогового значения, в результате чего фильтры набора более не используют необработанные измерения указанного блокированного спутника.
10. Способ по любому из пп.1-4, отличающийся тем, что каждый из фильтров набора формирует навигационное решение путем гибридизации инерциальных измерений и необработанных измерений сигналов, передаваемых спутниками.
11. Устройство спутникового позиционирования, содержащее набор (3) фильтров Калмана, каждый из которых формирует навигационное решение на основе необработанных измерений сигналов, передаваемых спутниками, отличающееся тем, что содержит
- модуль (6) адаптации, выполненный с возможностью оценки для каждого из фильтров набора влияния отказа спутника на навигационное решение, формируемое данным фильтром, и корректировки такого навигационного решения в соответствии с указанной оценкой влияния отказа в случае констатации наличия отказа;
- модуль (7) определения отказа спутника, выполненный с возможностью:
- вычисления для каждого из фильтров набора перекрестного отклонения, отражающего расхождение между наблюдением, соответствующим необработанному измерению со спутника, не используемого данным фильтром, и апостериорной оценкой указанного наблюдения по навигационному решению, сформированному данным фильтром Калмана и скорректированному модулем адаптации, и
- осуществления статистической проверки перекрестного отклонения для констатации наличия или отсутствия отказа спутника.
| Колосоуборка | 1923 |
|
SU2009A1 |
| СПОСОБ УСТРАНЕНИЯ ВЛИЯНИЯ ТРОПОСФЕРНЫХ И ИОНОСФЕРНЫХ ОШИБОК ИЗМЕРЕНИЯ В ОДНОЧАСТОТНЫХ ПРИЁМНИКАХ СПУТНИКОВОЙ НАВИГАЦИИ | 2002 |
|
RU2237257C2 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Трубчатая насадка пленочного аппарата | 1991 |
|
SU1801539A1 |

