Область техники, к которой относится изобретение
[0001] Настоящее изобретение, в общем, относится к системе отображения на карте автомобильных парковок. Более конкретно, настоящее изобретение относится к системе отображения на карте автомобильных парковок, которая накапливает информацию позиций транспортного средства для отображения на карте автомобильных парковок.
Уровень техники
[0002] Навигационные системы транспортного средства основываются на картографических данных для планирования пути для транспортных средств. Картографические данные для многих автомобильных парковок являются неполными или отсутствуют. В частности, данные относительно маршрутов на автомобильной парковке, в общем, отсутствуют, и автомобильные парковки могут часто изменять конфигурации и маршруты вследствие зачастую частного характера их владения и управления. Кроме того, автомобильные парковки могут иметь значительное число маршрутов движения и зон доступа транспортных средств.
Сущность изобретения
[0003] Обнаружено, что улучшение планирования пути на автомобильных парковках является возможным посредством накопления данных и информации позиции транспортного средства. С учетом уровня известной области техники, один аспект настоящего раскрытия сущности заключается в том, чтобы предоставлять систему отображения на карте автомобильных парковок, содержащую приемное устройство, устройство хранения данных и контроллер. Приемное устройство выполнено с возможностью принимать данные, передаваемые из множества транспортных средств, причем данные включают в себя событие парковки и позицию каждого транспортного средства из множества транспортных средств. Устройство хранения данных выполнено с возможностью сохранять данные, принимаемые посредством приемного устройства. Контроллер запрограммирован с возможностью определять то, что каждое транспортное средство из множества транспортных средств находится на автомобильной парковке, на основе события парковки и вычислять маршрут на автомобильной парковке на основе накопления данных, включающих в себя позицию каждого транспортного средства из множества транспортных средств.
[0004] Другой аспект настоящего раскрытия сущности предоставляет систему отображения на карте автомобильных парковок, содержащую систему определения местоположения, контроллер и передающее устройство. Система определения местоположения выполнена с возможностью определять позицию транспортного средства. Контроллер находится на борту транспортного средства и запрограммирован с возможностью определять то, что транспортное средство находится на автомобильной парковке, на основе события парковки. Передающее устройство находится на борту транспортного средства и выполнено с возможностью передавать данные, включающие в себя событие парковки и позицию транспортного средства, с тем чтобы инструктировать удаленному контроллеру вычислять маршрут на автомобильной парковке на основе передаваемых данных, включающих в себя позицию транспортного средства.
[0005] Другой аспект настоящего раскрытия сущности предоставляет систему отображения на карте автомобильных парковок, содержащую систему определения местоположения, передающее устройство, приемное устройство, устройство хранения данных и контроллер. Система определения местоположения выполнена с возможностью определять позицию транспортного средства. Передающее устройство находится на борту транспортного средства и выполнено с возможностью передавать данные, включающие в себя обнаруженное событие парковки и позицию транспортного средства. Приемное устройство выполнено с возможностью принимать данные, передаваемые из транспортного средства. Устройство хранения данных выполнено с возможностью сохранять данные, принимаемые посредством приемного устройства. Контроллер запрограммирован с возможностью определять то, что транспортное средство находится на автомобильной парковке, на основе события парковки и вычислять маршрут на автомобильной парковке на основе данных, включающих в себя позицию каждого транспортного средства из множества транспортных средств.
Краткое описание чертежей
[0006] Ссылаясь теперь на прилагаемые чертежи, которые являются частью этого исходного раскрытия сущности:
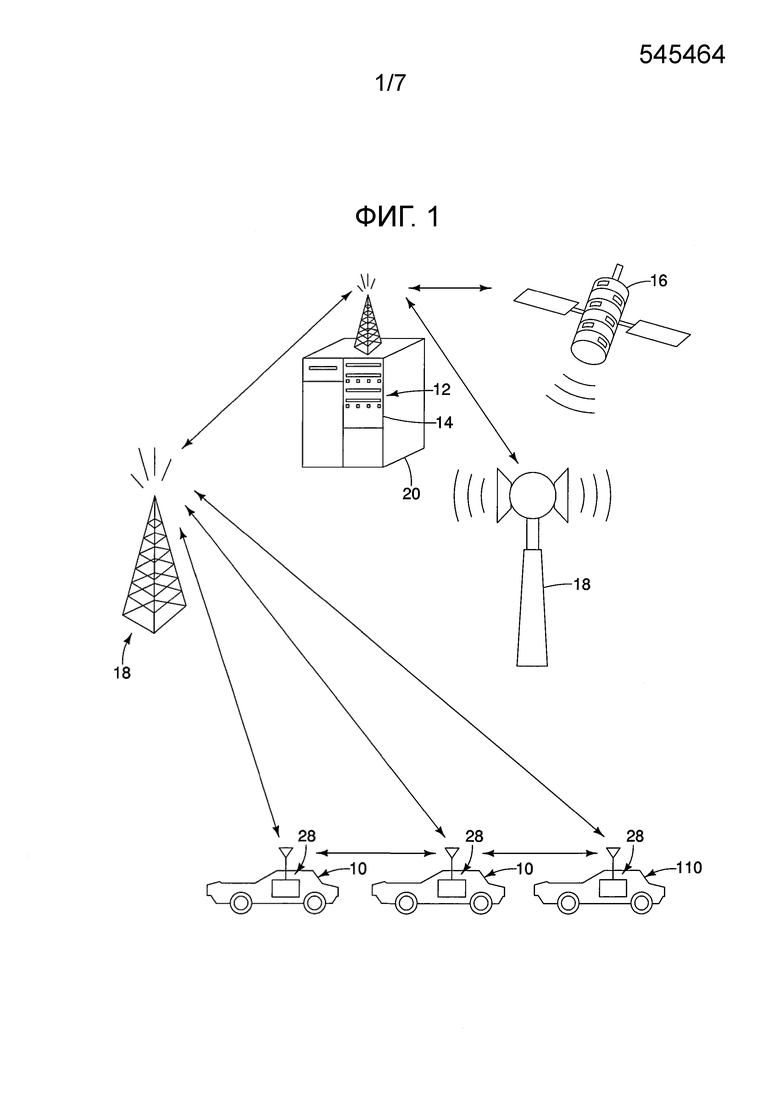
[0007] Фиг. 1 является блок-схемой, иллюстрирующей пример транспортного средства, оснащенного системой отображения на карте автомобильных парковок согласно вариантам осуществления, раскрытым в данном документе, относительно удаленного сервера и компонентов сети беспроводной связи;
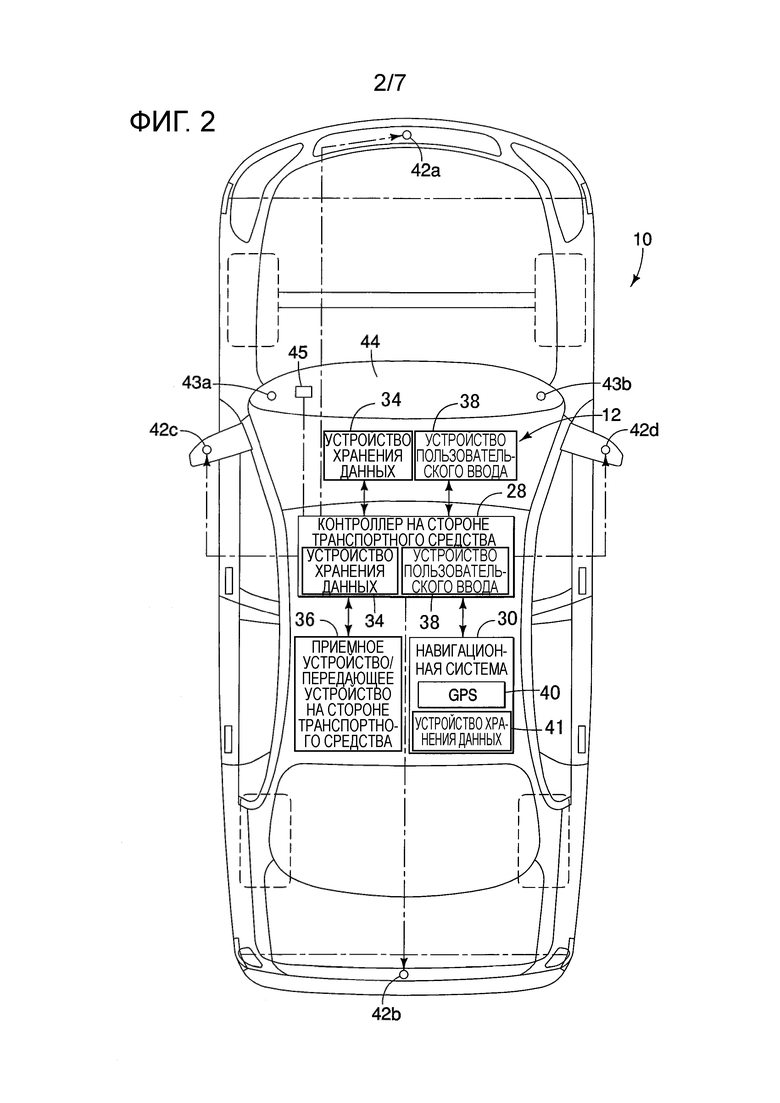
[0008] Фиг. 2 является блок-схемой примерного компонента транспортного средства, оснащенного системой отображения на карте автомобильных парковок согласно вариантам осуществления, раскрытым в данном документе;
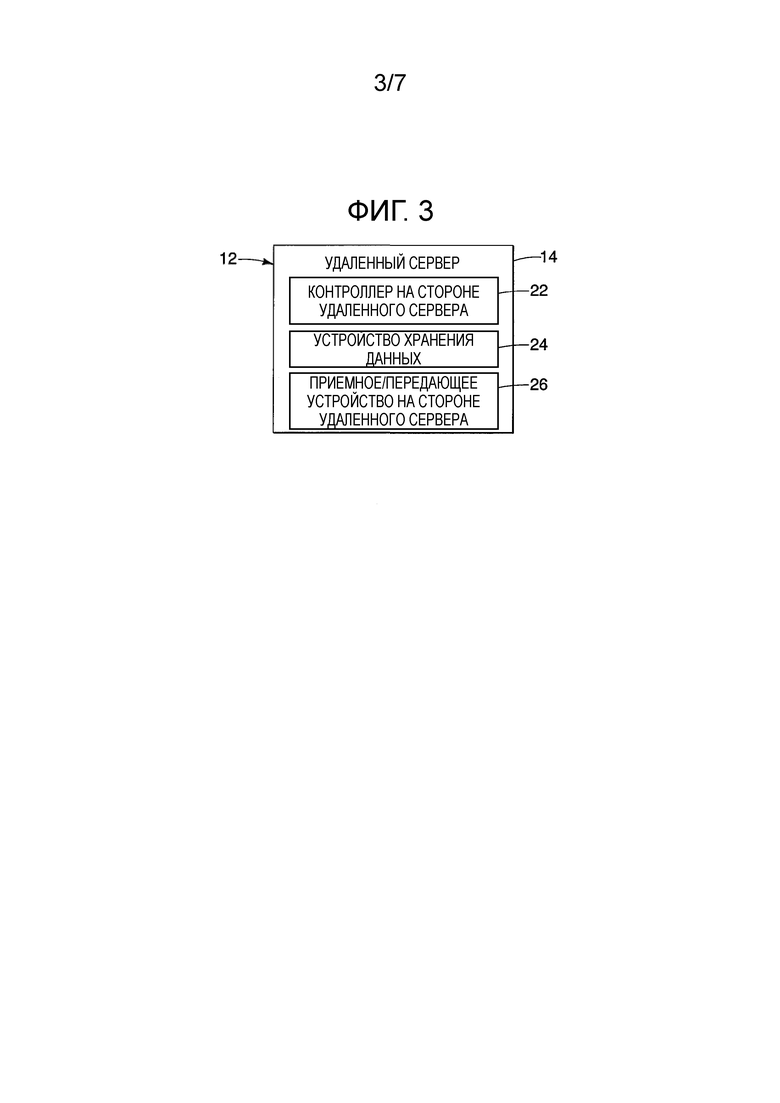
[0009] Фиг. 3 является блок-схемой примерных компонентов системы отображения на карте автомобильных парковок согласно вариантам осуществления, раскрытым в данном документе;
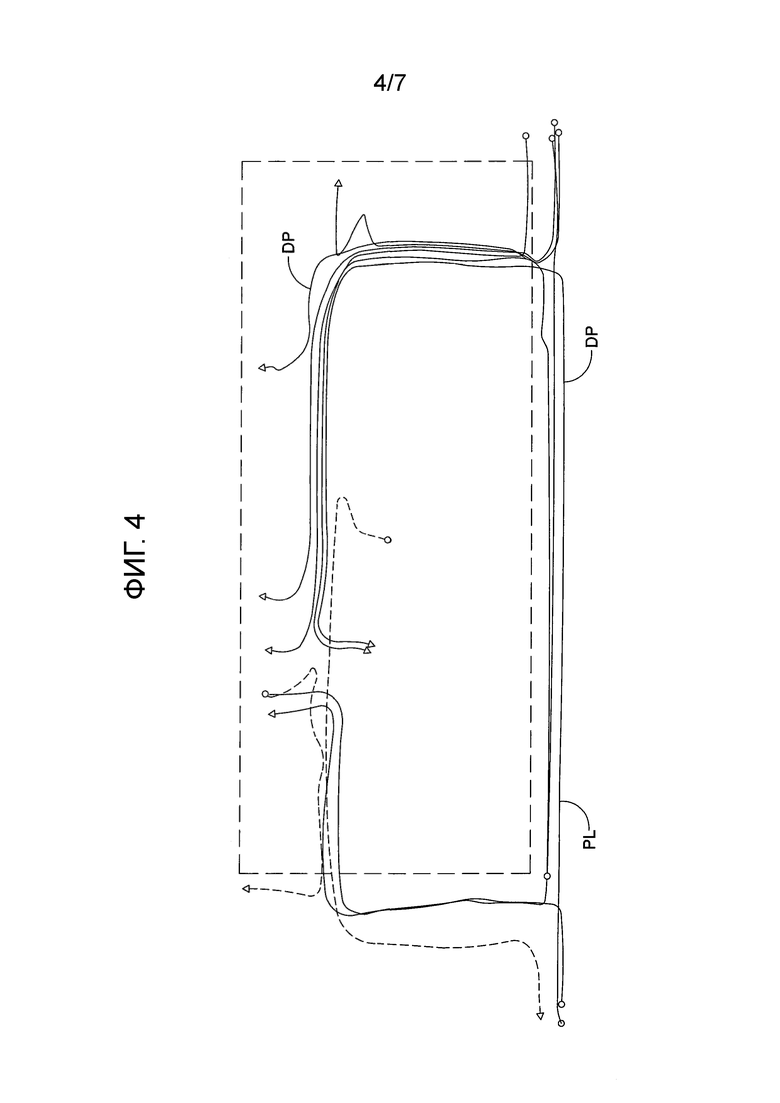
[0010] Фиг. 4 является схематичным видом автомобильной парковки с данными маршрутов транспортного средства;
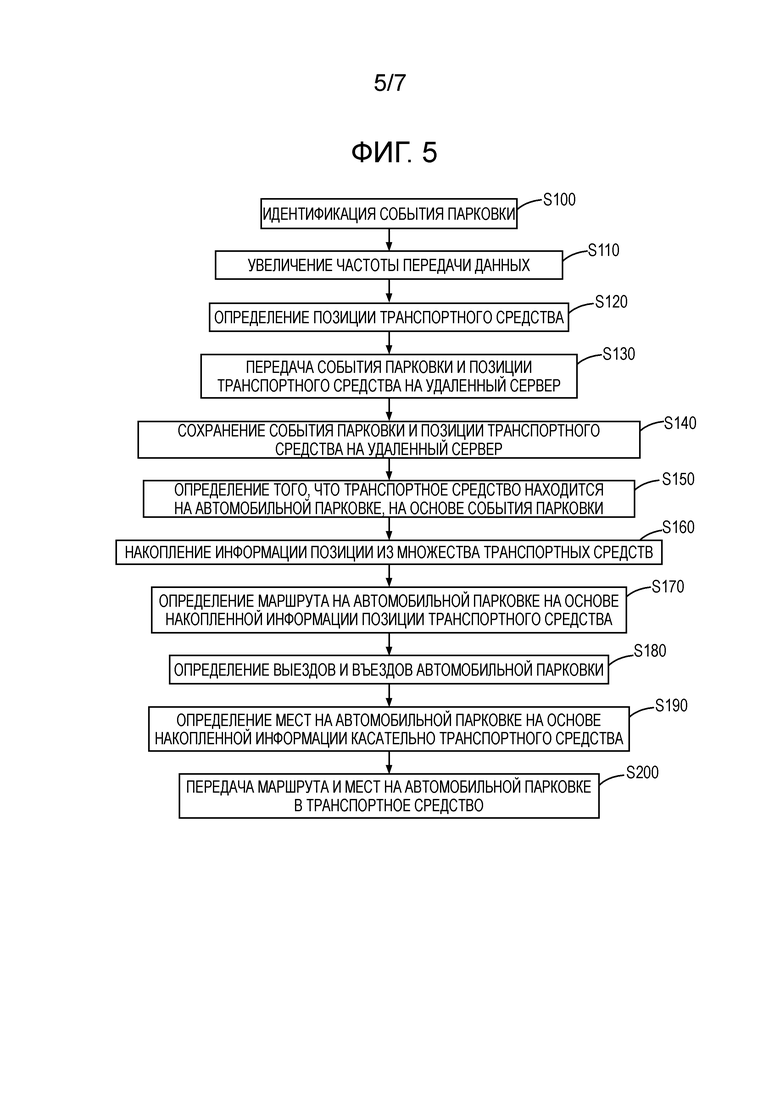
[0011] Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей пример операций, выполняемых посредством системы отображения на карте автомобильных парковок согласно вариантам осуществления, раскрытым в данном документе;
[0012] Фиг. 6 является схематичным видом контроллера системы отображения на карте автомобильных парковок согласно вариантам осуществления, раскрытым в данном документе, которая определяет вероятности маршрутов на автомобильной парковке и зон парковки; и
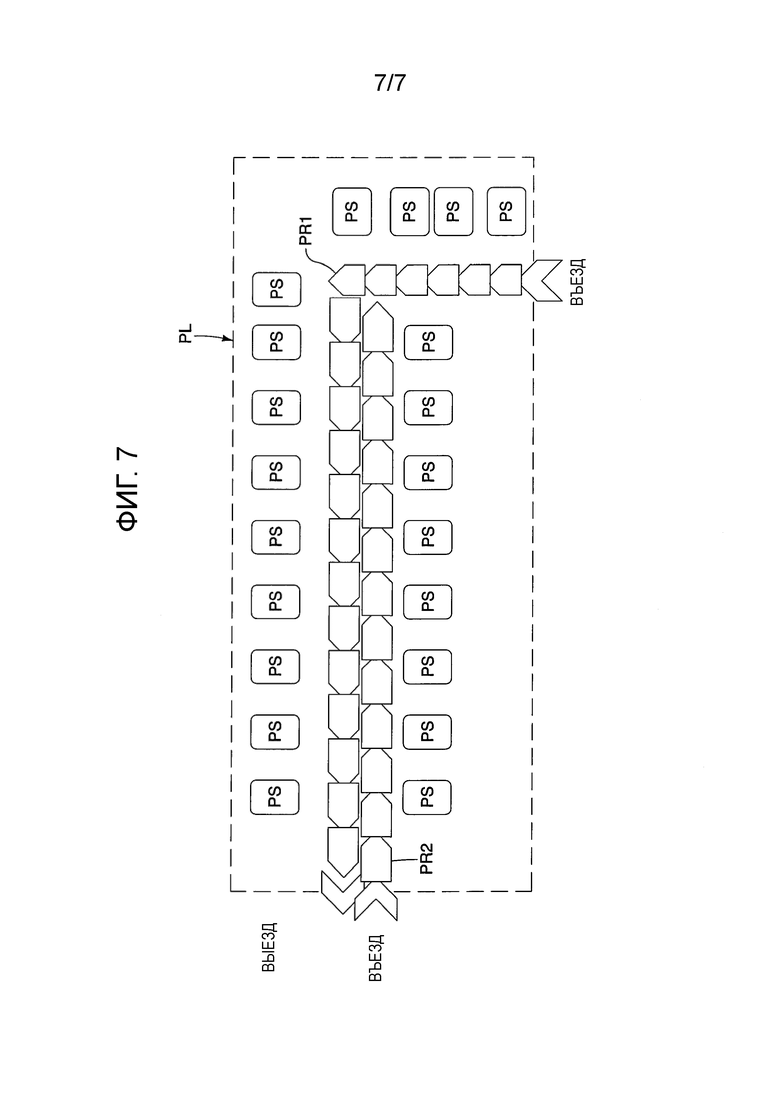
[0013] Фиг. 7 является схематичным видом автомобильной парковки, отображаемой на карте посредством системы отображения на карте автомобильных парковок согласно вариантам осуществления, раскрытым в данном документе.
Подробное описание вариантов осуществления
[0014] Выбранные варианты осуществления далее поясняются со ссылкой на чертежи. Специалистам в данной области техники из этого раскрытия сущности должно быть очевидным, что последующие описания вариантов осуществления предоставляются только для иллюстрации, а не для ограничения изобретения, заданного посредством прилагаемой формулы изобретения и ее эквивалентов.
[0015] Фиг. 1 иллюстрирует множество транспортных средств 10, которые могут обмениваться данными с системой 12 отображения на карте автомобильных парковок согласно раскрытому варианту осуществления, которая располагается на удаленном сервере 14. Система 12 отображения на карте автомобильных парковок обменивается данными с транспортными средствами 10 и выполнена с возможностью отображать на карте автомобильную парковку PL (фиг. 7). Таким образом, система 12 отображения на карте автомобильных парковок отображает на карте места PS для парковки и маршруты PR1 и PR2 до парковки, как проиллюстрировано на фиг. 7.
[0016] Транспортные средства 10 и удаленный сервер 14 могут обмениваться данными с сетью двунаправленной беспроводной связи. Как видно на фиг. 1, например, сеть двунаправленной беспроводной связи может включать в себя один или более глобальных навигационных спутников (спутник 16 на основе GPS (глобальной системы позиционирования)) и один или более наземных модулей, таких как придорожные (наземные) модули 18 (два показаны) и базовую станцию или внешний сервер 20, который может включать в себя удаленный сервер 14. Следует отметить, что удаленный сервер может быть расположен отдельно от базовой станции 20 и может быть расположен в любом подходящем месте. GPS-спутники 16 и придорожные модули 18 отправляют и принимают сигналы в/из транспортного средства 10 и удаленного сервера 14. Базовая станция 20 отправляет и принимает сигналы в/из транспортного средства 10 и удаленного сервера 14 через сеть придорожных модулей 18 или любую другую подходящую сеть двунаправленной беспроводной связи.
[0017] Ссылаясь первоначально на фиг. 2 и 3, система 12 отображения на карте автомобильных парковок и транспортное средство 10 проиллюстрированы в соответствии с одним вариантом осуществления. Предпочтительно, система 12 отображения на карте автомобильных парковок располагается полностью на удаленном сервере 14; тем не менее, система 12 отображения на карте автомобильных парковок может включать аспекты систем транспортного средства 10. Как показано на фиг. 3, удаленный сервер 14 может включать в себя контроллер 22 на стороне удаленного сервера, устройство 24 хранения данных и приемное устройство/передающее устройство 26 на стороне удаленного сервера. Дополнительно, как проиллюстрировано на фиг. 2, транспортное средство 10 может включать в себя контроллер 28 на стороне транспортного средства, навигационную систему 30, устройство(а) 34 хранения данных и приемное устройство/передающее устройство 36 на стороне транспортного средства. Также транспортное средство 10 может включать в себя дисплей. Удаленный сервер 14 может использовать любой из компонентов транспортного средства, чтобы упрощать отображение на карте автомобильной парковки PL. Например, в одном варианте осуществления, контроллер 28 на стороне транспортного средства для транспортного средства 10 может использоваться в дополнение или вместо контроллера 22 на стороне удаленного сервера, чтобы выполнять вычисления и проводить определения, описанные в данном документе.
[0018] Как контроллер 22 на стороне удаленного сервера, так и контроллер 28 на стороне транспортного средства предпочтительно включают в себя микрокомпьютер с управляющей программой, которая управляет компонентами удаленного сервера 14 или транспортного средства 10, как пояснено ниже. Контроллер 22 на стороне удаленного сервера и контроллер 28 на стороне транспортного средства включают в себя другие стандартные компоненты, к примеру, схему интерфейса ввода, схему интерфейса вывода и устройство(а) хранения данных, такое как устройство ROM (постоянное запоминающее устройство) и устройство RAM (оперативное запоминающее устройство). Микрокомпьютер контроллера 22 на стороне удаленного сервера и контроллера 28 на стороне транспортного средства может быть запрограммирован, по меньшей мере, с возможностью допускать управление системой 12 отображения на карте автомобильных парковок в соответствии с блок-схемой последовательности операций способа по фиг. 6, поясненное ниже. Микрокомпьютер контроллера 28 на стороне транспортного средства запрограммирован с возможностью управлять одним или более из устройства 34 хранения данных, навигационной системы 30, дисплея и приемного устройства/передающего устройства 36 на стороне транспортного средства и выполнять определения или принимать решения, как пояснено в данном документе. Дополнительно, контроллер 22 на стороне удаленного сервера запрограммирован с возможностью управлять одним или более из устройств 24 хранения данных и приемного устройства/передающего устройства 26 на стороне удаленного сервера и обмениваться данными с системами транспортного средства 10, чтобы управлять или активировать любую из соответствующих систем. Запоминающие схемы для контроллера 22 на стороне удаленного сервера и контроллера 28 на стороне транспортного средства сохраняют результаты обработки и управляющие программы, такие как результаты обработки и управляющие программы, описанные в данном документе для удаленного сервера 14 и транспортного средства 10. Контроллер 22 на стороне удаленного сервера и контроллер 28 на стороне транспортного средства функционально соединены с системами, описанными в данном документе, традиционным способом, а также с другими электрическими системами в транспортном средстве 10 или на удаленном сервере 14. Например, в транспортном средстве 10 контроллер 28 на стороне транспортного средства функционально соединен с системами, такими как сигнал поворота, стеклоочистители, фары и любые другие подходящие системы. Такое соединение обеспечивает возможность контроллеру 28 на стороне транспортного средства отслеживать и управлять любой из этих систем требуемым образом. Внутреннее RAM контроллера 22 на стороне удаленного сервера и контроллера 28 на стороне транспортного средства сохраняет состояния функциональных флагов и различные управляющие данные. Внутреннее ROM контроллера 22 на стороне удаленного сервера и контроллера 28 на стороне транспортного средства сохраняет информацию для различных операций. Контроллер 22 на стороне удаленного сервера и контроллер 28 на стороне транспортного средства допускают избирательное управление любым из компонентов, описанных в данном документе, в соответствии с управляющей программой. Специалистам в данной области техники из этого раскрытия сущности должно быть очевидным, что точные структуры и алгоритмы для контроллера 22 на стороне удаленного сервера и контроллера 28 на стороне транспортного средства могут быть любой комбинацией аппаратных средств и программного обеспечения, которая осуществляет функции настоящего изобретения. Кроме того, контроллер 22 на стороне удаленного сервера и контроллер 28 на стороне транспортного средства могут обмениваться данными с другими компонентами системы 12 отображения на карте автомобильных парковок, поясненной в данном документе, например, через шину контроллерной сети (CAN) либо любым другим подходящим способом, как следует понимать в данной области техники.
[0019] Контроллер 28 на стороне транспортного средства может включать в себя или поддерживать связь с устройствами 38 пользовательского ввода. Устройства 38 пользовательского ввода могут включать в себя, например, человеко-машинный интерфейс (HMI), который предоставляет возможность пользователю (например, водителю и/или пассажиру) взаимодействовать с контроллером 28 на стороне транспортного средства, как понятно в данной области техники и поясняется в данном документе. Контроллер 28 на стороне транспортного средства дополнительно может включать в себя или поддерживать связь с одним или более устройств 34 хранения данных, которые могут сохранять информацию, как пояснено в данном документе. Например, устройства 34 хранения данных могут сохранять данные событий парковки и данные позиции транспортного средства для передачи на удаленный сервер 14. Такие данные могут передаваться непрерывно или практически непрерывно или в любом требуемом интервале либо могут сохраняться и передаваться в последующее время, определенное посредством контроллера или запрашиваемое посредством удаленного сервера 14.
[0020] Как подробнее показано на фиг. 2, контроллер 28 на стороне транспортного средства в этом примере включает в себя или поддерживает связь с навигационной системой 30 транспортного средства. Навигационная система 30 транспортного средства включает в себя, например, устройство 40 связи, такое как GPS-устройство связи, которое обменивается данными с GPS-спутниками 16. Устройство 40 связи также может обмениваться данными с одним или более наземных модулей 18 и базовой станцией 20 или внешним сервером, с тем чтобы получать информацию местоположения. Кроме того, навигационная система 30 транспортного средства в этом примере включает в себя или поддерживает связь с устройством 41 хранения данных, которое может сохранять информацию касательно транспортного средства, такую как информация предыдущих маршрутов транспортного средства, информация местоположения или информация другого транспортного средства, которую может формировать GPS, в дополнение к картографическим данным и другим связанным с определением местоположения данным, как следует понимать в данной области техники. Устройство 41 хранения данных может быть дополнением или работать в сочетании с устройством 34 хранения данных. Следует отметить, что не обязательно иметь два устройства хранения данных, и устройства 34 и 41 хранения данных могут представлять собой идентичное устройство хранения данных или комбинироваться в одно устройство хранения данных. Кроме того, устройства 34 и 41 хранения данных могут располагаться в позиции в транспортном средстве 10 и не обязательно в навигационной системе 30 и в контроллере 28 на стороне транспортного средства.
[0021] Контроллер 28 на стороне транспортного средства в этом примере дополнительно включает в себя или поддерживает связь с дисплеем. Дисплей отображает, например, навигационную информацию, которая указывает местоположение транспортного средства 10 относительно карты, как следует понимать в данной области техники. Дисплей также может отображать предупредительные сигналы или информацию, связанную с удаленными транспортными средствами около транспортного средства 10, которая может представлять интерес для водителя транспортного средства 10.
[0022] Помимо этого, транспортное средство 10 оснащено датчиком, который может формировать или захватывать информацию окружения транспортного средства. Информация окружения транспортного средства может представлять собой любую информацию или данные, связанные с транспортным средством 10, в том числе, но не только, изображения внутреннего окружения, изображения внешнего окружения или информацию, связанную с характеристиками транспортного средства 10 (например, скорость транспортного средства, направление, перемещение относительно вертикальной оси, ускорение, траекторию, курс, состояние предупреждения о контактах транспортного средства или любой другой параметр).
[0023] Датчик может быть оснащен, по меньшей мере, одним устройством формирования изображений, таким как высокоскоростная камера. В этом примере, транспортное средство 10 включает в себя переднее устройство 44a формирования изображений, заднее устройство 44b формирования изображений, устройство 44c формирования изображений с водительской стороны (или с левой стороны) и устройство 44d формирования изображений с пассажирской стороны (или с правой стороны). Устройства 44a-44d формирования изображений позиционируются на транспортном средстве 10 с возможностью захватывать изображения (или информацию) в реальном времени, чтобы предоставлять формирование изображений с полем обзора в 360 градусов вокруг всего внешнего периметра транспортного средства 10. Любая информация касательно транспортного средства, сформированная посредством устройств 44a-44d формирования изображений, может сохраняться в устройстве 34 хранения данных для будущего анализа или проверки, требуемым образом.
[0024] Соответственно, когда транспортное средство 10 въезжает на автомобильную парковку PL, транспортное средство 10 сохраняет или передает данные местоположения. Транспортное средство 10 затем выполняет событие парковки, указывающее то, что транспортное средство 10 находится на автомобильной парковке PL. Событие парковки может представлять собой любое одно или более подходящих событий, которые определяют то, что транспортное средство 10 паркуется или припарковано. Например, событие парковки может представлять собой, по меньшей мере, одно из переключения передач, остановки транспортного средства в течение предварительно определенного времени, начала движения транспортного средства, остановки транспортного средства и местоположения транспортного средства при парковке либо любое другое подходящее событие. Событие парковки и информация местоположения могут передаваться на удаленный сервер 14 через приемное устройство/передающее устройство 36 на стороне транспортного средства в подходящее время.
[0025] Как показано на фиг. 3, удаленный сервер 14 включает в себя контроллер 22 на стороне удаленного сервера, устройство 24 хранения данных и приемное устройство/передающее устройство 26 на стороне удаленного сервера. Удаленный сервер 14, через приемное устройство/передающее устройство 26 на стороне удаленного сервера, принимает данные, передаваемые из транспортного средства 10, причем данные включают в себя событие парковки (т.е. событие, которое определяет то, что транспортное средство паркуется или припарковано) и позицию транспортного средства 10. Устройство 24 хранения данных затем сохраняет эти данные.
[0026] Таким образом, при работе, контроллер 22 на стороне удаленного сервера запрограммирован с возможностью определять то, что каждое транспортное средство 10 из множества транспортных средств находится на автомобильной парковке PL, на основе события парковки и вычисляет маршрут на автомобильной парковке (например, PR1 и/или PR2) на основе накопления данных, включающих в себя отдельные позиции множества транспортных средств 10. Как указано выше, событие парковки представляет собой, по меньшей мере, одно из переключения передач, остановки транспортного средства в течение предварительно определенного времени, начала движения транспортного средства, остановки транспортного средства и местоположения транспортного средства при парковке.
[0027] В одном варианте осуществления, система 12 отображения на карте автомобильных парковок допускает получение информации маршрута для планирования пути на автомобильной парковке PL. Планирование пути, в общем, означает нахождение пути, который обеспечивает возможность транспортному средству достигать конкретного места для парковки. Таким образом, система 12 отображения на карте автомобильных парковок определяет то, по какому маршруту (например, PR1 или PR2) следует ехать, чтобы парковать транспортное средство 10 в одном из обозначенных мест PS для парковки. В этом варианте осуществления, система 12 отображения на карте автомобильных парковок логически выводит осуществимые маршруты до конкретного места для парковки на основе информации ранее ездивших транспортных средств, собранной из предыдущих транспортных средств 10, осуществляющих доступ к зонам автомобильной парковки. Соответственно, система 12 отображения на карте автомобильных парковок формирует карты наиболее распространенных общедоступных зон автомобильной парковки PL.
[0028] Как показано на фиг. 4, когда транспортное средство 10 въезжает на автомобильную парковку PL, данные передаются на удаленный сервер 14. Удаленный сервер 14 накапливает пути DP движения множества транспортных средств 10, которые въезжают на автомобильную парковку PL. Данные автомобильной парковки могут представлять собой позицию транспортного средства, определенную посредством навигационной системы 30 транспортного средства или определенную любым другим подходящим способом (например, счисление пути, выполняемое посредством контроллера). Таким образом, приемное устройство/передающее устройство 26 на стороне удаленного сервера выполнено с возможностью принимать навигацию (т.е. GPS-данные) из транспортного средства 10. Кроме того, на основе события парковки, контроллер 22 на стороне удаленного сервера допускает определение того, транспортное средство 10 въезжает или выезжает из автомобильной парковки PL. На фиг. 4, проходы для выезда показаны пунктирной линией, тогда как проходы для въезда или проходы для парковки показаны сплошной линией. Как указано выше, событие парковки может представлять собой одно или более из переключения передач, остановки транспортного средства в течение предварительно определенного времени, начала движения транспортного средства, остановки транспортного средства и местоположения транспортного средства при парковке либо любое другое подходящее событие. Например, событие парковки для транспортного средства 10, въезжающего на автомобильную парковку PL, может представлять собой переключение передач из режима вождения в режим парковки, полную остановку транспортного средства 10 в течение значительного времени и/или выключение транспортного средства 10. Дополнительно, событие парковки для транспортного средства 10, выезжающего из автомобильной парковки PL, может представлять собой переключение передач из парковочного режима на режим вождения или режим заднего хода, начало движения транспортного средства 10 после периода бездействия и/или включение транспортного средства 10.
[0029] После того, как событие парковки возникает на борту транспортного средства 10, контроллер 28 на стороне транспортного средства может предварительно обрабатывать требуемые данные и передавать их на удаленный сервер 14 через приемное устройство/передающее устройство 36 на стороне транспортного средства. В одном варианте осуществления, релевантные данные представляют собой позицию транспортного средства и/или необработанные GPS-данные с частотой 1 Гц и вводы управления транспортным средством, угол поворота при рулении, позицию педали, тормозное давление и/или позицию переключения коробки передач с частотой 10 Гц.
[0030] Соответственно, как показано на фиг. 5, контроллер 22 на стороне удаленного сервера сначала идентифицирует событие парковки на этапе S100. Альтернативно, водитель (т.е. пользователь системы отображения на карте автомобильных парковок) транспортного средства 10 может запрашивать отображение на карте автомобильных парковок. Следует отметить, что событие парковки может определяться посредством либо контроллера 22 на стороне удаленного сервера, либо контроллера 28 на стороне транспортного средства. Таким образом, контроллер 28 на стороне транспортного средства может определять то, что возникает событие парковки, за счет этого определяя то, что данные событий парковки должны отправляться на удаленный сервер 14. Альтернативно, транспортное средство 10 может просто передавать данные на удаленный сервер 14, и контроллер 22 на стороне удаленного сервера удаленного сервера 14 может определять то, что возникает событие парковки. После того, как событие парковки идентифицируется, контроллер 28 на стороне транспортного средства в транспортном средстве может увеличивать частоту, с которой данные передаются через передающее устройство на этапе S110. Альтернативно, контроллер 22 на стороне удаленного сервера может запрашивать то, что транспортное средство 10 должно увеличивать частоту, с которой данные передаются через приемное устройство/передающее устройство 36 на стороне транспортного средства. Другими словами, определение увеличивать частоту, с которой передаются данные, может осуществляться посредством либо контроллера 28 на стороне транспортного средства на борту транспортного средства 10, либо контроллера 22 на стороне удаленного сервера на удаленном сервере 14. Навигационная система 30 транспортного средства (или контроллер 28 на стороне транспортного средства) затем определяет позицию транспортного средства 10 на этапе S120. Событие парковки или такая информация, что возникает событие парковки, и позиция транспортного средства передаются на удаленный сервер 14 через приемное устройство/передающее устройство 36 на стороне транспортного средства и приемное устройство/передающее устройство 26 на стороне удаленного сервера на этапе S130. Альтернативно, после того, как данные навигационной системы передаются на удаленный сервер 14, контроллер 22 на стороне удаленного сервера может определять позицию транспортного средства на основе GPS-данных.
[0031] Удаленный сервер 14 сохраняет событие парковки и позицию транспортного средства 10 в устройстве 24 хранения данных на удаленном сервере 14 на этапе S140. Контроллер 22 на стороне удаленного сервера определяет то, что транспортное средство 10 находится на автомобильной парковке, на основе события парковки на этапе S150. Удаленный сервер 14 накапливает информацию позиции из транспортного средства 10 по мере того, как транспортное средство 10 перемещается через автомобильную парковку PL, на этапе S160. Кроме того, удаленный сервер 14 может накапливать информацию позиции из множества транспортных средств 10, которые движутся через автомобильную парковку PL. Контроллер 22 на стороне удаленного сервера затем может определять маршрут PR1 и/или PR2 на автомобильной парковке на основе накопленной информации позиции транспортного средства на этапе S170.
[0032] Дополнительно, контроллер 22 на стороне удаленного сервера может определять выезды и въезды автомобильной парковки (фиг. 7) на основе позиции транспортного средства до или после события парковки на этапе S180. Например, когда событие парковки представляет собой событие парковки для транспортного средства 10, въезжающего на автомобильную парковку, контроллер 22 на стороне удаленного сервера может определять то, что когда транспортное средство 10 съезжает из отображаемой на карте дороги или другой зоны, транспортное средство 10 въезжает на автомобильную парковку PL. В одном варианте осуществления, приемное устройство/передающее устройство 26 на стороне удаленного сервера принимает данные, передаваемые до события парковки. С другой стороны, когда событие парковки представляет собой событие парковки для транспортного средства 10, выезжающего из автомобильной парковки PL, контроллер 22 на стороне удаленного сервера может определять то, что после того, как транспортное средство 10 въезжает на отображаемую на карте дорогу или другую зону, транспортное средство 10 выезжает из автомобильной парковки PL. В одном варианте осуществления, приемное устройство/передающее устройство 26 на стороне удаленного сервера принимает данные, передаваемые после события парковки. Дополнительно, контроллер 22 на стороне удаленного сервера может определять места PS на автомобильной парковке на основе позиции транспортного средства 10 или накопленных данных множества транспортных средств 10 на этапе S190.
[0033] В одном варианте осуществления, автомобильная парковка PL определяется на основе одного или более событий парковки. Например, когда транспортное средство 10 переключается из режима вождения в режим парковки, и транспортное средство 10 выключается, контроллер 22 на стороне удаленного сервера определяет то, что транспортное средство 10 позиционируется в месте PS для парковки. Размер мест PS для парковки может вычисляться или логически выводиться на основе известного размера транспортного средства 10. После того, как контроллер 22 на стороне удаленного сервера отображает на карте автомобильную парковку PL, информация автомобильной парковки может передаваться обратно в транспортное средство 10 на этапе S200. Отображение на карте автомобильных парковок может постоянно обновляться по условию принимаемое из транспортных средств 10, и навигационная система 30 одного из транспортных средств 10 может постоянно обновляться с помощью наиболее актуальной информации автомобильной парковки.
[0034] Как показано на фиг. 6, в одном варианте осуществления, при отображении на карте автомобильной парковки PL, контроллер 22 на стороне удаленного сервера может разделять зону автомобильной парковки на сетчатую структуру. На основе данных, принимаемых из транспортных средств 10, контроллер 22 на стороне удаленного сервера может анализировать каждое местоположение в сетке с вектором направления и припаркованным местоположением, затем определять каждое местоположение с вероятностным представлением p. Другими словами, накопление данных из транспортных средств 10 на автомобильной парковке PL обеспечивает возможность контроллеру определять вероятность того, представляет собой каждая зона сетки маршрут, место для парковки или запретную/недоступную для проезда зону. Кроме того, накопление данных из транспортных средств 10 на автомобильной парковке PL обеспечивает возможность контроллеру 22 на стороне удаленного сервера определять направление каждого маршрута PR1 и PR2. Таким образом, по мере того, как транспортное средство 10 движется через автомобильную парковку PL и постоянно передает местоположение, контроллер 22 на стороне удаленного сервера может определять направление маршрутов PR1 и PR2 и то, являются определенные маршруты однонаправленными или двунаправленными. В одном варианте осуществления, контроллер 22 на стороне удаленного сервера запрограммирован с возможностью определять вероятность маршрута на автомобильной парковке и/или вероятность p места для парковки на основе предварительно определенного объема данных, включающих в себя позиции множества транспортных средств 10 в конкретных вероятностных пространствах во времени.
[0035] Как показано на фиг. 6, степень вероятности может варьироваться. Например, зоны, которые имеют высокую вероятность определения в качестве места PS для парковки или маршрута (PR1 или PR2), показаны полужирной линией. Зоны, которые имеют низкую вероятность определения в качестве места PS для парковки или маршрута (PR1 или PR2), показаны пунктирной линией. Зоны, которые имеют среднюю или среднеуровневую вероятность определения в качестве места PS для парковки или маршрута (PR1 или PR2), показаны нормальной линией. Такая вероятность может определяться на основе данных по частоте, которые указывают то, что транспортное средство 10 находится в этой зоне. Например, некоторые транспортные средства могут проезжать зоны или парковаться в зонах, которые не обозначены для такого использования. Такие зоны могут обозначаться как маловероятные. С другой стороны, зоны, которые часто проезжаются, или в которых транспортные средства часто паркуются, должны указываться с высокой вероятностью.
[0036] Дополнительно, контроллер 22 на стороне удаленного сервера может определять размер мест PS для парковки, расстояние, которое транспортное средство 10 должно проезжать из мест PS для парковки, и расстояние, которое транспортное средство 10 должно проезжать из маршрутов PR1 и PR2, которые имеют транспортные средства, движущиеся в противоположном направлении.
[0037] После того, как контроллер 22 на стороне удаленного сервера определяет вероятность того, представляет собой каждая зона сетки маршрут, место для парковки или "запретную/недоступную для проезда" зону, контроллер 22 на стороне удаленного сервера может отображать на карте автомобильную парковку PL, как показано на фиг. 7. В этом варианте осуществления, автомобильная парковка PL отображается на карте с двумя точками въезда, точкой выезда и множеством мест для парковки.
[0038] Следует понимать, что транспортное средство 10 также может иметь датчики, как пояснено в данном документе. Настоящая система 12 отображения на карте автомобильных парковок может использоваться в сочетании с такими датчиками, чтобы обеспечивать возможность транспортному средству 10 двигаться через автомобильную парковку PL с/без помощи водителям. Например, в одном варианте осуществления, система 12 отображения на карте автомобильных парковок передает карту автомобильных парковок в транспортное средство 10. Транспортное средство 10 затем может использовать эту информацию для того, чтобы автономно перемещать транспортное средство 10 через автомобильную парковку PL, на основе вычисленной позиции маршрутов PR1 и PR2 и мест PS для парковки и направления маршрутов. Кроме того, транспортное средство 10 также может дополнять отображаемую на карте автомобильную парковку PL с помощью данных, полученных через или определенных посредством датчиков, чтобы определять местоположение помех (например, удаленных транспортных средств, пешеходов или других стационарных объект) и зон остановки.
[0039] Настоящее изобретение не ограничено отображением на карте автомобильных парковок и может использоваться для того, чтобы отображать на карте другие зоны. Например, следует понимать, что система отображения на карте автомобильных парковок может использоваться для того, чтобы отображать на карте персональные зоны парковки и подъездные пути или другие внедорожные местоположения.
[0040] GPS-система и устройство отображения представляют собой стандартные компоненты, которые известны в данной области техники. Поскольку GPS-система и устройство отображения известны в данной области техники, эти структуры подробно не поясняются или иллюстрируются в данном документе. Наоборот, специалистам в данной области техники из этого раскрытия сущности должно быть очевидным, что компоненты могут представлять собой любой тип структуры и/или программирования, которое может использоваться для того, чтобы осуществлять настоящее изобретение.
[0041] Соответственно, система 12 отображения на карте автомобильных парковок, описанная в данном документе, отображает на карте зоны, в иных случаях не отображаемые в навигационных системах транспортного средства, и обновляет конфигурацию автомобильных парковок в реальном времени, чтобы устанавливать актуальную карту автомобильных парковок. Эта система повышает надежность и эффективность привязки к маршруту и автономной навигации на основе инструкций для пассажиров транспортного средства, пешеходов и широкого круга лиц.
[0042] Общая интерпретация терминов
В понимании объема настоящего изобретения, термин "содержащий" и его производные, при использовании в данном документе, имеют намерение быть допускающими поправки терминами, которые указывают присутствие заявленных признаков, элементов, компонентов, групп, целых чисел и/или этапов, но не исключают присутствие других незаявленных признаков, элементов, компонентов, групп, целых чисел и/или этапов. Вышеприведенное также применяется к словам, имеющим аналогичные значения, к примеру, терминам "включающий в себя", "имеющий" и их производным. Кроме того, термины "часть" или "секция" при использовании в единственном числе могут иметь двойное значение одной части или множества частей. Также при использовании в данном документе для того, чтобы описывать вышеприведенные варианты осуществления, следующие термины, обозначающие направление "назад", "выше", "вниз", "вертикальный", "горизонтальный", "ниже" и "поперечный", а также любые другие аналогичные термины, обозначающие направление, означают направления транспортного средства, оснащенного системой отображения на карте автомобильных парковок. Соответственно, эти термины при использовании для того, чтобы описывать настоящее изобретение, должны быть интерпретированы относительно транспортного средства, оснащенного системой отображения на карте автомобильных парковок.
[0043] Термин "обнаруживать" при использовании в данном документе для того, чтобы описывать операцию или функцию, выполняемую посредством компонента, узла, устройства и т.п., включает в себя компонент, узел, устройство и т.п., которое не требует физического обнаружения, а вместо этого включает в себя определение, измерение, моделирование, прогнозирование или вычисление и т.п., чтобы выполнять операцию или функцию.
[0044] Термин "выполнен с возможностью" при использовании в данном документе для того, чтобы описывать компонент, узел или часть устройства, включает в себя аппаратные средства и/или программное обеспечение, которые имеют конструкцию и/или запрограммированы таким образом, чтобы выполнять требуемую функцию.
[0045] Термины степени, такие как "почти", при использовании в данном документе означают обоснованную величину отклонения модифицированного термина, так что конечный результат существенно не изменяется.
[0046] Хотя только выбранные варианты осуществления являются предпочтительными для того, чтобы иллюстрировать настоящее изобретение, специалистам в данной области техники из этого раскрытия сущности должно быть очевидным, что различные изменения и модификации могут выполняться в данном документе без отступления от объема изобретения, заданного в прилагаемой формуле изобретения. Например, размер, форма, местоположение или ориентация различных компонентов могут быть изменены при необходимости и/или желании. Компоненты, которые показаны непосредственно соединенными или контактирующими друг с другом, могут иметь промежуточные структуры, расположенные между ними. Функции одного элемента могут выполняться посредством двух и наоборот. Структуры и функции одного варианта осуществления могут приспосабливаться в другом варианте осуществления. Необязательно одновременное присутствие всех преимуществ в конкретном варианте осуществления. Каждый признак, который является уникальным относительно предшествующего уровня техники, один или в комбинации с другими признаками, также должен считаться отдельным описанием дополнительных вариантов осуществления изобретения заявителем, включающим в себя структурные и/или функциональные принципы, осуществленные посредством таких признаков. Таким образом, вышеприведенные описания вариантов осуществления согласно настоящему изобретению предоставляются только для иллюстрации, а не для ограничения изобретения, заданного посредством прилагаемой формулы изобретения и ее эквивалентов.
[0047] Настоящая заявка основана на заявке на патент (США) № 14/736747, поданной 11 июня 2015 года, все содержимое которой содержится по ссылке в данном документе.

Группа изобретений относится к области отображения на карте автомобильных парковок. Система включает в себя приемное устройство, устройство хранения данных и контроллер. Приемное устройство выполнено с возможностью принимать данные, передаваемые из множества транспортных средств, причем данные включают в себя событие парковки и позицию каждого транспортного средства из множества транспортных средств. Устройство хранения данных выполнено с возможностью сохранять данные, принимаемые посредством приемного устройства. Контроллер запрограммирован с возможностью определять то, что каждое транспортное средство из множества транспортных средств находится на автомобильной парковке, на основе события парковки и вычислять маршрут на автомобильной парковке на основе накопления данных, включающих в себя позицию каждого транспортного средства из множества транспортных средств. Обеспечивается улучшение планирования пути на автомобильных парковках посредством накопления данных и информации позиции транспортного средства. 3 н. и 16 з.п. ф-лы, 7 ил.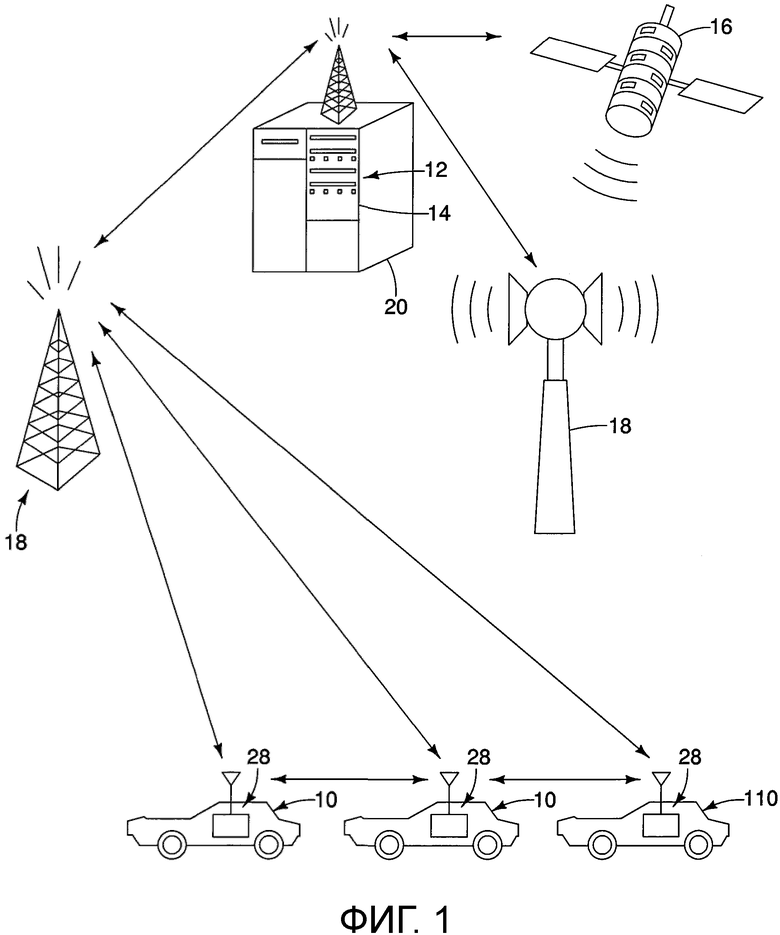
1. Система отображения на карте автомобильных парковок, содержащая:
приемное устройство, выполненное с возможностью принимать данные, передаваемые из множества транспортных средств, причем данные включают в себя событие парковки и позицию каждого транспортного средства из множества транспортных средств;
устройство хранения данных, выполненное с возможностью сохранять данные, принимаемые посредством приемного устройства;
передающее устройство на борту транспортного средства, причем передающее устройство выполнено с возможностью передавать данные, включающие в себя событие парковки и позицию транспортного средства; и
контроллер, запрограммированный с возможностью определять то, что каждое транспортное средство из множества транспортных средств находится на автомобильной парковке, на основе события парковки и вычислять маршрут на автомобильной парковке на основе накопления данных, включающих в себя позицию каждого транспортного средства из множества транспортных средств, при этом
контроллер запрограммирован с возможностью увеличивать частоту данных, передаваемых посредством передающего устройства, когда контроллер определяет то, что каждое транспортное средство из множества транспортных средств находится на автомобильной парковке.
2. Система отображения на карте автомобильных парковок по п. 1, в которой:
приемное устройство выполнено с возможностью принимать данные, передаваемые из множества транспортных средств, причем позиция каждого транспортного средства представляет собой одну позицию из множества позиций каждого транспортного средства в пределах автомобильной парковки в данное время, и
контроллер запрограммирован с возможностью вычислять маршрут на автомобильной парковке на основе накопления данных, включающих в себя множество позиций каждого транспортного средства в пределах автомобильной парковки.
3. Система отображения на карте автомобильных парковок по п. 1, в которой:
событие парковки представляет собой по меньшей мере одно из переключения передач, остановки транспортного средства в течение предварительно определенного времени, начала движения транспортного средства, остановки транспортного средства и местоположения транспортного средства при парковке.
4. Система отображения на карте автомобильных парковок по п. 1, в которой
приемное устройство выполнено с возможностью принимать данные, передаваемые до события парковки.
5. Система отображения на карте автомобильных парковок по п. 4, в которой
контроллер запрограммирован с возможностью определять въезд автомобильной парковки на основе данных, передаваемых до события парковки.
6. Система отображения на карте автомобильных парковок по п. 1, в которой
приемное устройство выполнено с возможностью принимать данные, передаваемые после события парковки.
7. Система отображения на карте автомобильных парковок по п. 6, в которой
контроллер запрограммирован с возможностью определять выезд автомобильной парковки на основе данных, передаваемых после события парковки.
8. Система отображения на карте автомобильных парковок по п. 1, в которой:
приемное устройство выполнено с возможностью принимать данные глобальной системы позиционирования из транспортного средства, и
контроллер выполнен с возможностью определять позицию транспортного средства на основе данных глобальной системы позиционирования.
9. Система отображения на карте автомобильных парковок по п. 1, в которой
контроллер запрограммирован с возможностью определять направленный поток движения транспортных средств на автомобильной парковке.
10. Система отображения на карте автомобильных парковок по п. 1, в которой
контроллер запрограммирован с возможностью определять вероятность маршрута на автомобильной парковке на основе предварительно определенного объема данных, включающих в себя позицию каждого транспортного средства из множества транспортных средств.
11. Система отображения на карте автомобильных парковок по п. 1, в которой
контроллер выполнен с возможностью определять местоположение мест для парковки на основе позиции каждого транспортного средства из множества транспортных средств и события парковки.
12. Система отображения на карте автомобильных парковок по п. 11, дополнительно содержащая
передающее устройство, выполненное с возможностью передавать маршрут на автомобильной парковке и местоположение мест для парковки, определенных посредством контроллера, по меньшей мере одному транспортному средству из множества транспортных средств.
13. Система отображения на карте автомобильных парковок, содержащая:
систему определения местоположения, выполненную с возможностью определять позицию транспортного средства;
контроллер на борту транспортного средства, запрограммированный с возможностью определять то, что транспортное средство находится на автомобильной парковке, на основе события парковки; и
передающее устройство на борту транспортного средства, причем передающее устройство выполнено с возможностью передавать данные, включающие в себя событие парковки и позицию транспортного средства, с тем чтобы инструктировать удаленному контроллеру вычислять маршрут на автомобильной парковке на основе передаваемых данных, включающих в себя позицию транспортного средства, при этом
контроллер на борту транспортного средства запрограммирован с возможностью увеличивать частоту данных, передаваемых посредством передающего устройства, когда контроллер на борту транспортного средства определяет то, что транспортное средство находится на автомобильной парковке.
14. Система отображения на карте автомобильных парковок по п. 13, в которой:
событие парковки представляет собой по меньшей мере одно из переключения передач, остановки транспортного средства в течение предварительно определенного времени, начала движения транспортного средства, остановки транспортного средства и местоположения транспортного средства при парковке.
15. Система отображения на карте автомобильных парковок по п. 13, в которой
приемное устройство выполнено с возможностью принимать данные, передаваемые до события парковки.
16. Система отображения на карте автомобильных парковок по п. 15, в которой
контроллер запрограммирован с возможностью определять въезд автомобильной парковки на основе данных, передаваемых до события парковки.
17. Система отображения на карте автомобильных парковок по п. 13, в которой
приемное устройство выполнено с возможностью принимать данные, передаваемые после события парковки.
18. Система отображения на карте автомобильных парковок по п. 17, в которой
контроллер запрограммирован с возможностью определять выезд автомобильной парковки на основе данных, передаваемых после события парковки.
19. Система отображения на карте автомобильных парковок, содержащая:
систему определения местоположения, выполненную с возможностью определять позицию транспортного средства;
передающее устройство на борту транспортного средства, причем передающее устройство выполнено с возможностью передавать данные, включающие в себя обнаруженное событие парковки и позицию транспортного средства;
приемное устройство, выполненное с возможностью принимать данные, передаваемые из транспортного средства;
устройство хранения данных, выполненное с возможностью сохранять данные, принимаемые посредством приемного устройства; и
контроллер, запрограммированный с возможностью определять то, что транспортное средство находится на автомобильной парковке, на основе события парковки и вычислять маршрут на автомобильной парковке на основе данных, включающих в себя позицию каждого транспортного средства из множества транспортных средств, при этом
контроллер запрограммирован с возможностью увеличивать частоту данных, передаваемых посредством передающего устройства, когда контроллер определяет то, что транспортное средство находится на автомобильной парковке.
| JP 2009069059 A, 02.04.2009 | |||
| US 2012044091 A1, 23.02.2012 | |||
| НАВИГАЦИОННОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ ПРЕДОСТАВЛЕНИЯ ДОСТУПНОСТИ ПАРКОВОЧНЫХ МЕСТ | 2009 |
|
RU2519568C2 |

