ОБЛАСТЬ ТЕХНИКИ
Техническое решение относится к способам определения характеристик атмосферы и может использоваться в метеорологии, в авиации, задачах видеонаблюдения.
УРОВЕНЬ ТЕХНИКИ
Большое количество научных, технических и прочих наблюдений происходят на открытом пространстве. Видимость объектов, участвующих в наблюдениях зависит от многих параметров атмосферы и освещения, при этом прозрачность атмосферы меняется в течение суток, дней, времен года и т.д. Информация о текущей прозрачности атмосферы имеет огромную важность в сфере видеонаблюдения и дает возможность оценить реальную текущую дальность обнаружения при решении задач мониторинга территорий и обнаружения объектов (например, с использованием видеокамер или наблюдателей). В частности, такого рода информация позволяет определить зоны, которые выпадают из наблюдения из-за недостаточной прозрачности атмосферы, и использовать для этих территорий другие способы обнаружения.
Из уровня техники известно изобретение RU 1314806, «Способ определения прозрачности атмосферы», Сакерин С.М., Кабанов М.В., опубликовано 15.03.1994 г., реферат. В данном решении описан способ определения прозрачности атмосферы путем измерения через атмосферу по горизонтальной трассе яркости объекта наблюдения при изменении расстояния между ним и точкой наблюдения при одном угле визирования на объект, отличающийся тем, что, с целью повышения точности определения прозрачности атмосферы на различных высотах, определяют в области двух местоположений точки наблюдения относительно объекта наблюдения изменение яркости последнего в зависимости от изменения расстояния точки наблюдения до него и по отношению полученных значений судят об искомой прозрачности атмосферы. В данном техническом решении датчик должен быть подвижен, поэтому данный способ нельзя использовать на уже существующих стационарных системах видеонаблюдения.
Из уровня техники известно техническое решение, описанное в патенте US 4921349, "Photographic method for monitoring visibility through measurement of transmittance and path radiance", Sonoma Technology, опубликовано 01.05.1990. В данном решении описан способ получения количественных данных, для определения прозрачности, интенсивности излучения, с использованием фотографической пленки. Данное техническое решение требует, по крайней мере, две станции с фотооборудованием, что не всегда приемлемо.
Существуют методы, предполагающие использование таких устройств, как трансмиссометры и нефелометры. Трансмиссометры, такие как фотометры импульсные, регистраторы дальности видимости, позволяют определять прозрачность фиксированного участка атмосферы. С помощью нефелометров, например, нефелометра Чарлсона, определяются характеристики рассеяния ограниченного объема атмосферы, но такие приборы не дают возможности выполнения дистанционных измерений. Лидары позволяют выполнять дистанционные измерения, однако их применение не всегда является целесообразным. Недостатками таких методов является невозможность производить измерения на уже существующем оборудовании.
СУЩНОСТЬ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Данное техническое решение направлено на устранение недостатков, присущих существующим аналогам.
Технический результат от использования данного технического решения заключается в повышении точности определения прозрачности атмосферы при неподвижно расположенном оптическом сенсоре, упрощение устройства определения прозрачности атмосферы, т.к. не требуется использовать специализированные устройства.
В качестве объектов окружающего пространства, используемых для определения прозрачности атмосферы, могут быть выступать различимые локальные или распределенные объекты. При этом, распределенные объекты, такие как лес, атмосфера, облака и т.д. могут рассматриваться как составной объект.
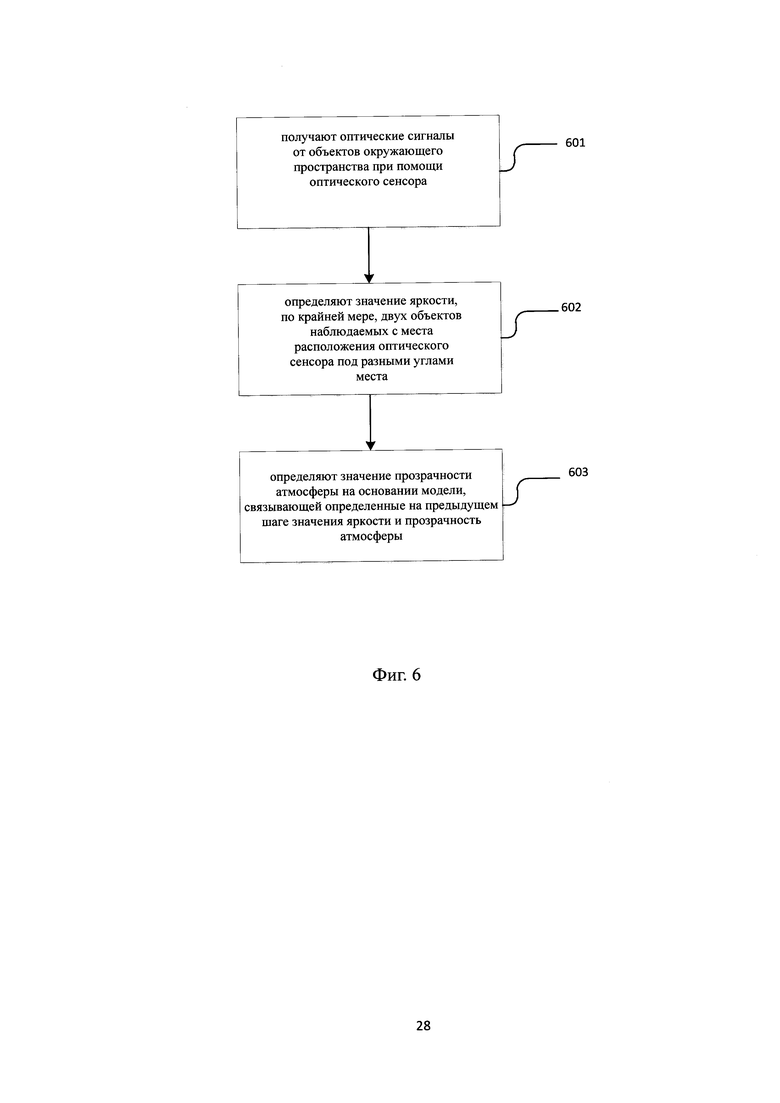
Данный технический результат достигается за счет способа определения прозрачности атмосферы, который включает следующие шаги: получают оптические сигналы от объектов окружающего пространства при помощи оптического сенсора 601 (Фиг. 6), после чего определяют значение яркости, по крайней мере, двух объектов, наблюдаемых с места расположения оптического сенсора под разными углами места 602, и определяют значение прозрачности атмосферы на основании модели, связывающей определенные на предыдущем шаге значения яркости объектов, наблюдаемых с места расположения оптического сенсора под разными углами места, и прозрачность атмосферы 603.
Для определения значения прозрачности атмосферы могут использовать методы численной оптимизации.
В качестве оптического сенсора 709 (Фиг. 7) может использоваться оптический сенсор с более чем одним приемником.
В качестве оптического сенсора может использоваться видео или фотокамера.
В качестве оптического сенсора может использоваться фиксированная видеокамера или поворотная видеокамера.
В качестве модели прозрачности атмосферы может использоваться модель горизонтальной дальности видимости /1/.
В качестве модели прозрачности атмосферы может использоваться модель негоризонтальной дальности видимости /2/.
Для повышения точности определения прозрачности атмосферы может использоваться информация о рельефе местности (карта рельефа). Для повышения точности определения прозрачности атмосферы может использоваться карта подстилающей поверхности.
В некоторых вариантах реализации, модель использует один или комбинацию следующих параметров: положение солнца, облачность, высота расположения оптического сенсора, однородность подстилающей поверхности, тип подстилающей поверхности, оптическая толщина атмосферы, прозрачность атмосферы, облачность, рельеф местности, параметры аэрозоля, в т.ч. индикатриса рассеяния, распределение частиц по высоте, метеорологические данные (температура, давление, направление и скорость ветра, влажность) и др.
Для определения яркости могут использоваться, по крайней мере, две части объекта наблюдаемые с места расположения оптического сенсора под разными углами места.
Для определения яркости могут использоваться объекты, наблюдаемые с места расположения оптического сенсора под углами места близкими к горизонту, чтобы уменьшить влияние неоднородности подстилающей поверхности, неоднородности яркости неба и облаков.
Для повышения точности определения прозрачности атмосферы могут использоваться яркости объектов, наблюдаемых с места расположения оптического сенсора под различными азимутами.
Данное техническое решение может быть выполнено в виде системы определения прозрачности атмосферы, которая включает в себя: по крайней мере, один оптический сенсор 709, одно или более устройство обработки команд 701, одно или более устройство хранения данных 702, одну или более программ 703, где одна или более программ хранятся на одном или более устройстве хранения данных 702 и исполняются на одном и более устройстве обработки команд 701, причем одна или более программ включает следующие инструкции: получают оптические сигналы от объектов окружающего пространства при помощи оптического сенсора, после чего определяют значение яркости, по крайней мере, двух объектов наблюдаемых с места расположения оптического сенсора под разными углами места, и определяют значение прозрачности атмосферы на основании модели, связывающей определенные на предыдущем шаге значения яркости объектов наблюдаемых с места расположения оптического сенсора под разными углами места и прозрачность атмосферы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Признаки и преимущества настоящего технического решения станут очевидными из приводимого ниже подробного описания и прилагаемых чертежей, на которых:
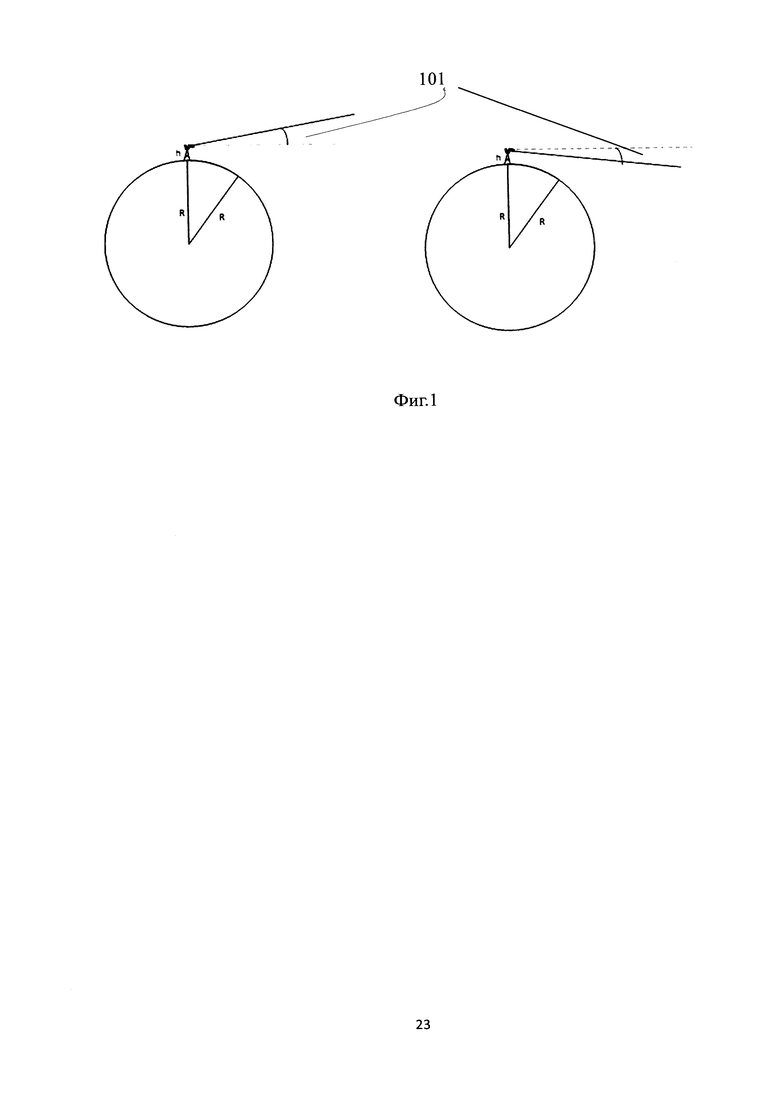
На Фиг. 1 - обозначение угла места;
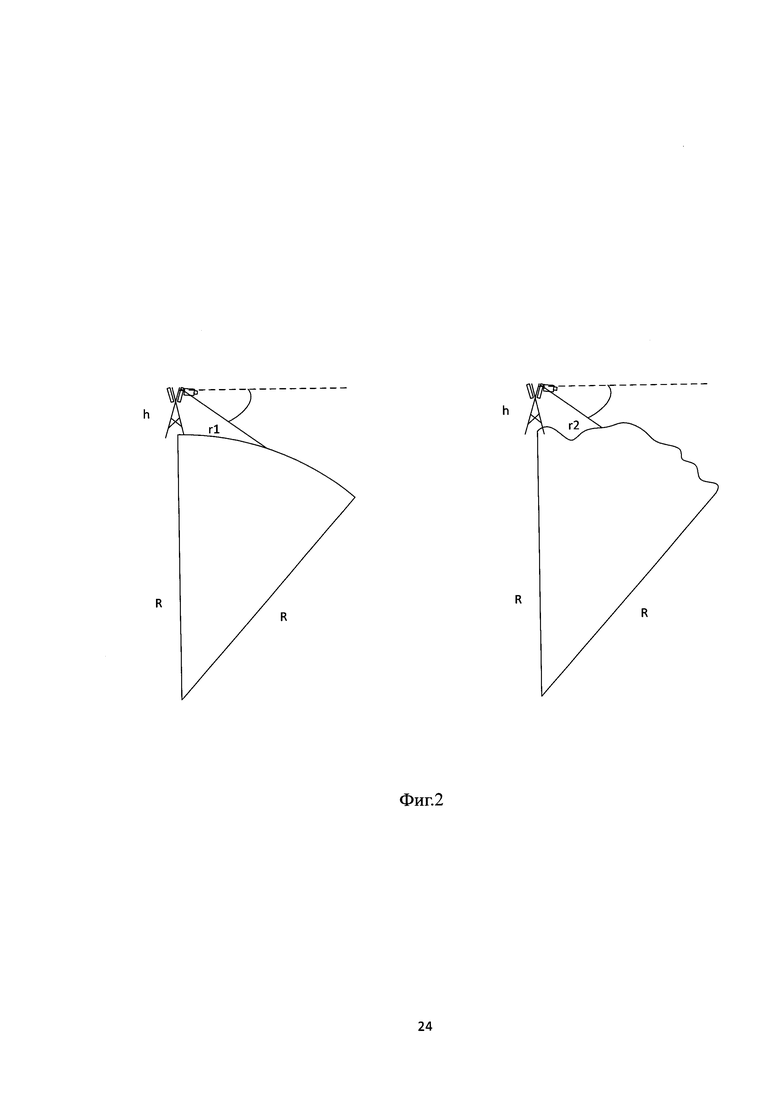
На Фиг. 2 - линия прямой видимости из точки наблюдения до пересечения с рельефом местности в определенном направлении;
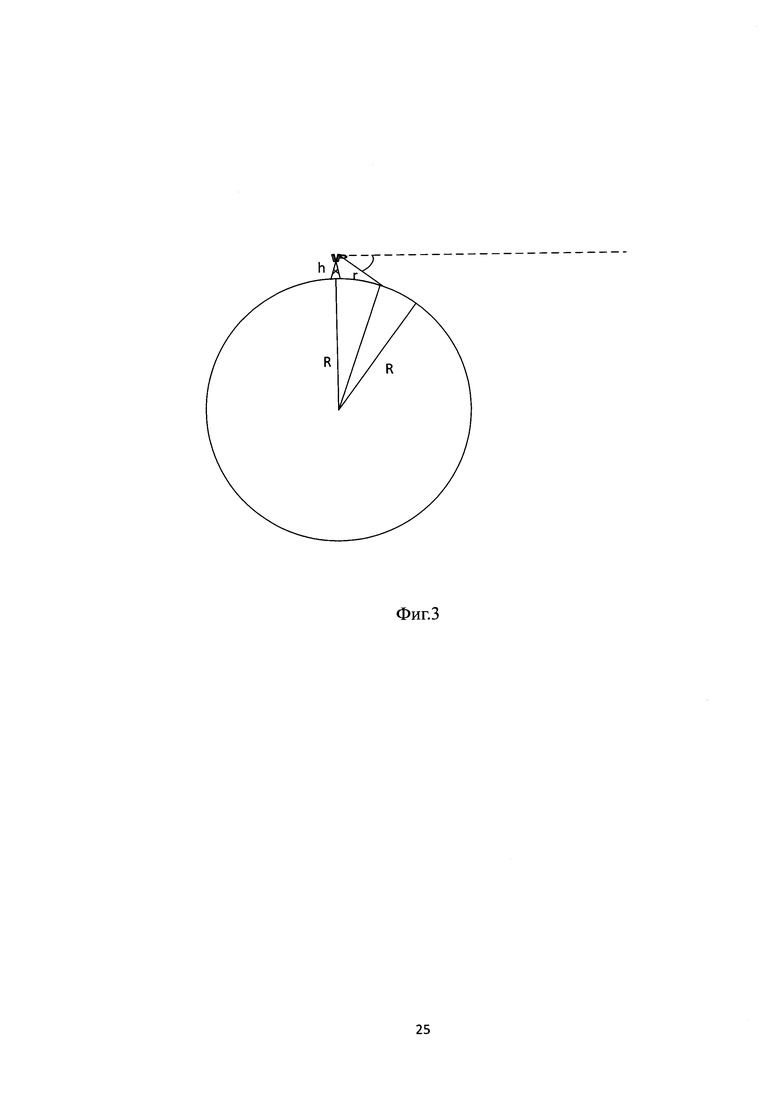
На Фиг. 3 - связь расстояния до точки наблюдения и угла места;
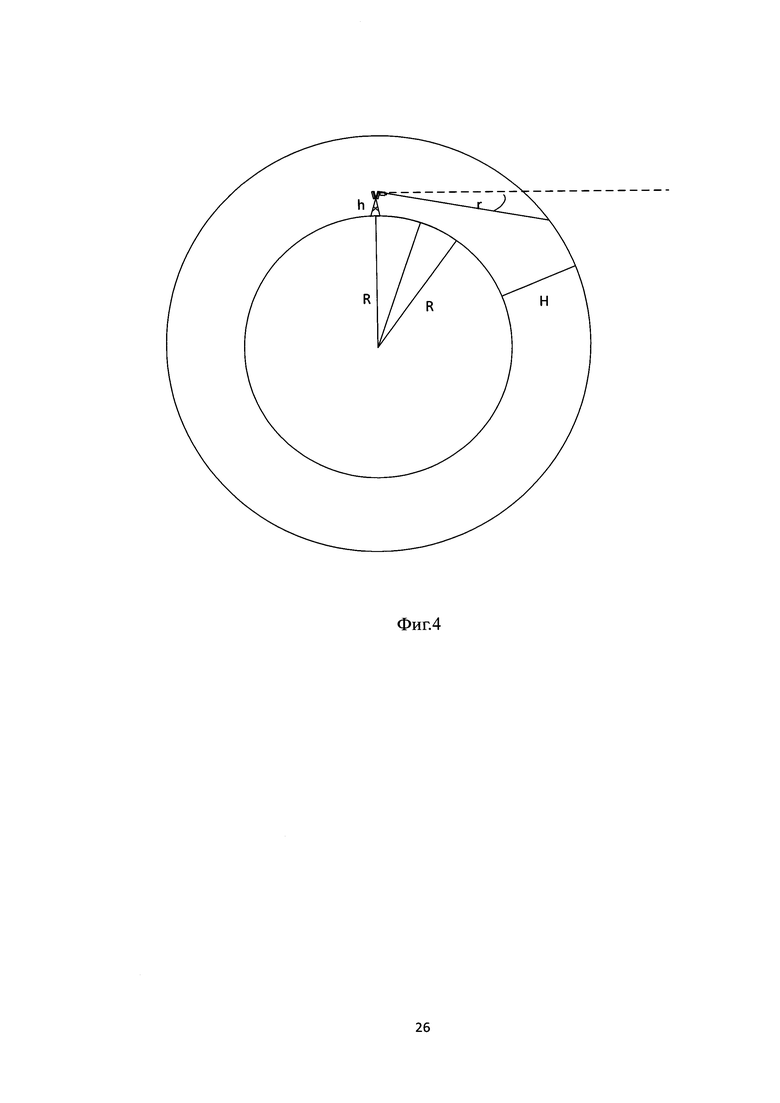
На Фиг. 4 - расстояние до точек наблюдения в диапазоне углов выше горизонта;
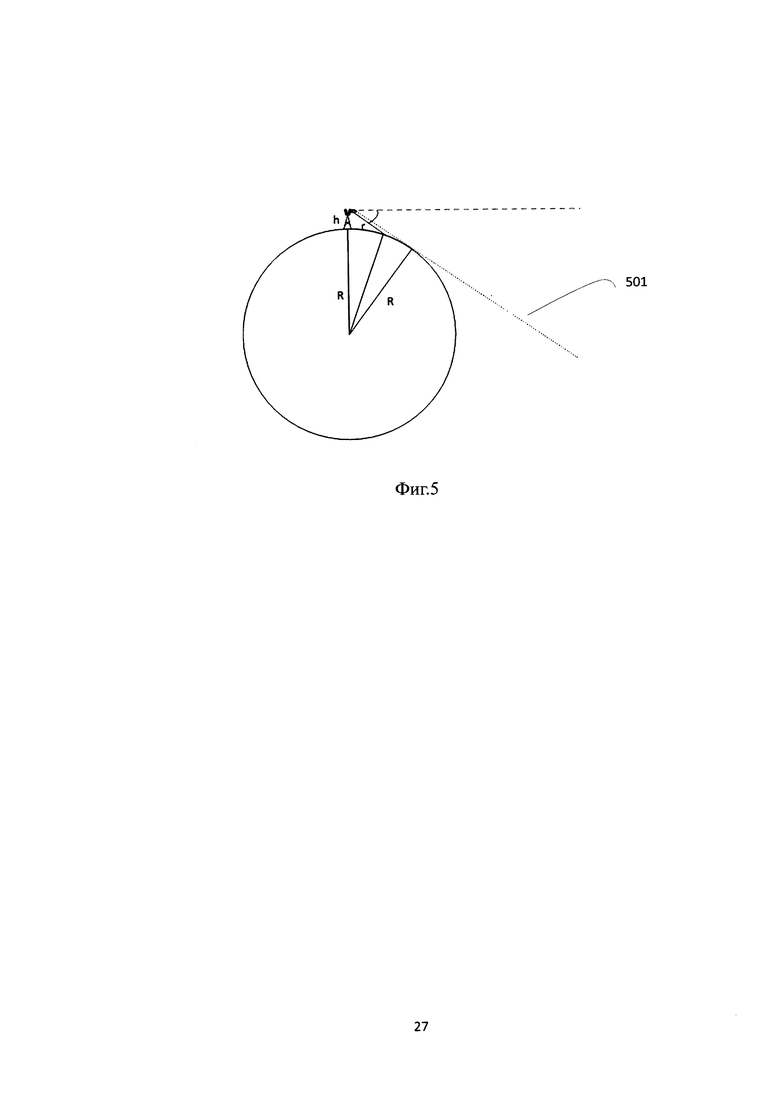
На Фиг. 5 - обозначение угла места горизонта;
На Фиг. 6 - блок-схема способа определения прозрачности атмосферы;
На Фиг. 7 - блок-схема системы определения прозрачности атмосферы;
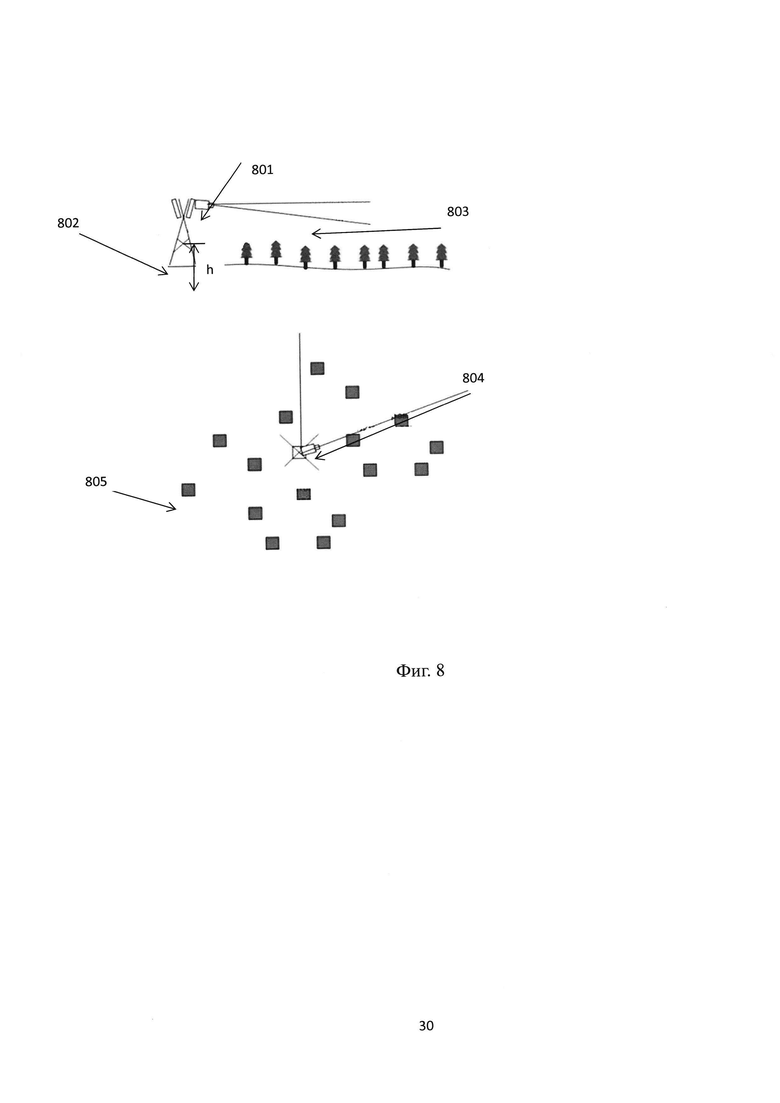
На Фиг. 8 - положение камеры в мировой системе координат, вид сбоку и сверху.
ПОДРОБНОЕ ОПИСАНИЕ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Данное техническое решение в различных своих вариантах осуществления может быть выполнено в виде способа, в виде системы или машиночитаемого носителя, содержащего инструкции для выполнения вышеупомянутого способа.
Под устройством обработки команд подразумевается электронный блок либо интегральная схема (микропроцессор), исполняющая машинные инструкции (программы).
Устройство обработки команд считывает и выполняет машинные инструкции (программы) с одного или более устройства хранения данных. В роли устройства хранения данных могут выступать, но, не ограничиваясь, жесткие диски (HDD), флеш-память, ПЗУ (постоянное запоминающее устройство), твердотельные накопители (SSD), оптические приводы.
Ниже будут рассмотрены некоторые термины, которые в дальнейшем будут использоваться при описании технического решения.
Программа - последовательность инструкций, предназначенных для исполнения устройством управления вычислительной машины или устройством обработки команд.
Истинный горизонт - мысленно воображаемый большой круг небесной сферы, плоскость которого перпендикулярна отвесной линии в точке наблюдения. Аналогично общему понятию, истинным горизонтом может называться не круг, а окружность, то есть линия пересечения небесной сферы и плоскости, перпендикулярной отвесной линии.
Линия прямой видимости - Путь прямого (незагоризонтного) распространения радиоволн (в том числе оптического диапазона) без учета их рефракции и влияния Земли.
Альбедо поверхности (в т.ч. леса) - числовая характеристика диффузной отражательной способности поверхности предмета (тела). Значение альбедо определяется для данной длины волны или диапазона длин волн.
Угол места - угловая высота наблюдаемого объекта над истинным горизонтом.
Азимут - угол между направлением на север и направлением на какой-либо заданный объект, или текущим направлением анализа.
Индикатриса рассеяния - функция, характеризующая закон распределения относительной интенсивности рассеянного излучения по различным направлениям в пределах полного телесного угла для данной точки среды и данного направления падающего луча.
Оптические датчики - небольшие по размерам электронные устройства, способные под воздействием электромагнитного излучения в видимом, инфракрасном и ультрафиолетовом диапазонах подавать единичный или совокупность сигналов на вход регистрирующей или управляющей системы.
Численные методы оптимизации - это методы приближенного или точного решения математических задач оптимизации, сводящиеся к выполнению конечного числа элементарных операций над числами, например, градиентные методы.
Предварительно, перед выполнением способа должна быть произведена настройка оборудования.
Устройство получения оптического сигнала (оптический сенсор) должно быть размещено на высоте, достаточной для того, чтобы иметь возможность получения оптических сигналов, приходящих как от неба, так и от земли.
Если в качестве оптического сенсора используется камера 801 (Фиг. 8), то она должна быть откалибрована, т.е. для каждого пикселя изображения должна быть доступна информация о том, с какого направления пришел сигнал. Согласно фиг. 8, элемент 801 - камера, 802 - вышка, 803 - угол места оптической оси камеры, 804 - азимут оптической оси камеры, 805 - деревья.
Внутренняя калибровка может быть получена экспериментально или по информации от производителя, при этом, под внутренней калибровкой в самом простом случае понимается функциональная взаимосвязь между пикселем изображения и направлением прихода луча относительно оптической оси объектива камеры и плоскости матрицы. Внешняя калибровка связывает положение оптической оси в трехмерном пространстве, т.е. конкретное положение камеры, и направление обзора. Для внешней калибровки должна быть известна высота расположения камеры (тогда в модели можно будет рассчитать модельные расстояния и яркости) и ее направление (тогда, имея параметры внутренней калибровки камеры, можно связать каждый пиксель изображения с направлением прихода, т.е. углом места и азимутом прихода луча). Параметры внешней калибровки задают положение камеры в мировой системе координат.
Внешняя калибровка (параметры) может быть описана: географическими координатами расположения камеры, высотой расположения камеры, азимутом и углом места направления обзора камеры 803 (направление оптической оси камеры).
При использовании фотодиода с сервоприводом, для внешней калибровки предварительно создают и настраивают виртуальную сетку положений фотодиода и отслеживают все изменения его положений.
Согласно предлагаемому техническому решению, способ определения прозрачности атмосферы (Фиг. 6), включает следующие шаги:
получают оптические сигналы от объектов окружающего пространства при помощи оптического сенсора;
В качестве источника оптического сигнала могут выступать различные предметы, газы, аэрозоль, облака, лес и другие объекты и/или их части.
В качестве оптического сенсора могут использоваться, но, не ограничиваясь, оптические сенсоры с более чем одним приемником.
В качестве оптического сенсора может использоваться, но, не ограничиваясь, видео или фотокамера.
В качестве оптического сенсора может использоваться фотодиод (фототранзистор) с узкой диаграммой направленности и сервоприводом, изменяющим его направление.
В качестве оптического сенсора может использоваться любой устройство, преобразующее свет (электромагнитные волны видимого или близкого к видимому диапазона) с известным направлением прихода оптического луча в электрический сигнал.
В общем случае, в качестве оптоэлектронного прибора может использоваться устройство, измеряющее яркость с данного направления. На выходе таких устройств может быть аналоговый сигнал, характеристики которого пропорциональны яркости, либо цифровой сигнал, в цифровом значении которого может быть закодировано значение яркости.
определяют значение яркости, по крайней мере, двух объектов, наблюдаемых с места расположения оптического сенсора под разными углами места
Для камеры, расположенной и сориентированной в пространстве, каждому пикселю соответствует определенное направление прихода луча, азимут и угол места 101 (Фиг. 1), вследствие чего значение яркости каждого пикселя будет соответствовать яркости наблюдаемого объекта, который наблюдается под данными углами.
Для фотодиода направление прихода луча определяется его расположением и направлением.
В некоторых вариантах реализации определяют значение яркости объектов, наблюдаемых под углами места выше и ниже горизонта.
В некоторых вариантах реализации определяют значение яркости множества объектов, наблюдаемых под одним азимутом и множеством углов места.
В некоторых вариантах реализации определяют значение яркости множества объектов, наблюдаемых из точки наблюдения, по крайней мере, по двум группам направлений, в каждой из которых объекты наблюдаются по одному азимуту и различным углам места.
В некоторых вариантах реализации используют объекты, которые наблюдаются с точки наблюдения под углами места, близкими к горизонту, чтобы уменьшить влияние неоднородности подстилающей поверхности. В некоторых вариантах реализации используют яркость объектов, наблюдаемых с точки наблюдения под множеством азимутов.
определяют значение прозрачности атмосферы на основании модели, связывающей определенные на предыдущем шаге значения яркости и прозрачность атмосферы.
Модель атмосферы - это некоторое приближенное представление процессов, протекающих в атмосфере. В общем случае, оптическая модель атмосферы описывает, каким образом может меняться яркость в зависимости от угла места при наблюдении в атмосфере. В модель входит информация о местоположении Солнца, прозрачности атмосферы, оптической толщине атмосферы и др. в зависимости от требуемой точности и уровня абстракции, приближения.
Модель прозрачности атмосферы использует, по крайней мере, два значения яркости объектов, наблюдаемых с места расположения оптического сенсора под разными углами места.
В некоторых вариантах реализации, модель использует один или комбинацию следующих параметров: положение Солнца, облачность, высота расположения оптического сенсора, однородность подстилающей поверхности, тип подстилающей поверхности, оптическая толщина атмосферы, прозрачность атмосферы, облачность, рельеф местности, параметры аэрозоля, в т.ч. индикатриса рассеяния, распределение частиц по высоте, метеорологические данные (температура, давление, направление и скорость ветра, влажность).
В некоторых вариантах реализации параметры, используемые в модели, получают из внешних источников данных.
В некоторых вариантах реализации параметры, используемые в модели, задаются на этапе настройки.
В некоторых вариантах реализации, модель атмосферы использует формулу Кошмидера, связывающую, по крайней мере, расстояние до объекта, яркость наблюдаемого объекта, прозрачность атмосферы и яркость неба.
В некоторых вариантах реализации расстояние до объекта, используемое в формуле Кошмидера, может быть определено, по крайней мере, на основе данных о высоте расположения сенсора.
В некоторых вариантах реализации для определения расстояния до объекта, используемого в формуле Кошмидера, используют информацию о рельефе местности.
Формула Кошмидера (для горизонтальной дальности видимости) описывает следующую взаимосвязь:

Где B - яркость наблюдаемого объекта в точке наблюдения, B0 - яркость наблюдаемого объекта без влияния атмосферы, S0 - яркость неба на горизонте, r - расстояние до наблюдаемого объекта, δ - искомый коэффициент прозрачности атмосферы, который связан с горизонтальной дальностью видимости, (т.е. метеорологическая дальность видимости в соответствии с публикацией /1/), через формулу:
Где Sm - метеорологическая дальность видимости, δ - коэффициент прозрачности атмосферы.
Примерная яркость наблюдаемого объекта (леса), известна на основании альбедо леса и яркости неба. В качестве наблюдаемого объекта может быть любая подстилающая поверхность: поля, леса, степи, горы, вода, города и т.д.
Яркость неба на горизонте может быть подбираемым параметром.
Используя информацию о высоте расположения оптического сенсора и модель сферической земли, можно оценить расстояние до точки наблюдения под разными углами места в диапазоне углов ниже горизонта. Ниже приведена формула связи расстояния до точки наблюдения и угла места (Фиг. 3):

где h - высота вышки, α - угол места, r - расстояние до точки наблюдения, R - радиус Земли.
В случае учета рельефа для определения расстояния надо использовать длину линии прямой видимости для каждого из направлений наблюдения, с учетом рельефа, что отличается от расчета дальности без учета рельефа (Фиг. 2)
Формула (3) действует для углов места ниже угла горизонта. Для углов места выше угла горизонта, используя модель, включающую предположение о наличии облаков с определенной высотой, можно рассчитать расстояние до каждой точки наблюдения в диапазоне углов выше горизонта:

где h - высота вышки, а - угол места, r - расстояние до точки наблюдения, H - высота облаков, R - радиус земли (Фиг. 4).
При этом угол места горизонта может рассчитываться по следующей формуле (Фиг. 5).
где αg - угол места видимого горизонта 501 (Фиг. 5), R радиус земли, h высота вышки.
Радиус земли известен из справочника и составляет 6371 км. Высота расположения оптического сенсора задается при предварительной настройке.
Примерная (оценочная) высота облаков известна из метеорологических наблюдений, получаемых, например, из сводок метеорологических наблюдений.
В некоторых вариантах реализации сводки метеорологических наблюдений получают из метеоданных систем SYNOP или METAR.
Используя приведенные выше формулы и модельные яркости земли и облаков (например, определенные из альбедо земли, или взятые из справочников), можно получить модельную зависимость яркости принимаемого излучения от угла места в интересуемом диапазоне углов.
Приведенная выше модель является моделью горизонтальной видимости. Можно так же использовать модель негоризонтальной видимости /2/. Модель негоризонтальной видимости способна учитывать изменение прозрачности атмосферы в зависимости от высоты, что может в некоторых случаях дать более точный результат, но усложняет расчет. Большая точность приводит к увеличению вычислительной сложности.
Для определения параметров модели используется методы обратного моделирования /3/, в т.ч. численная оптимизация.
Методы численной оптимизации предполагают наличие скалярной или векторной целевой функции, зависящей от одного или нескольких параметров. При этом в процессе оптимизации подбором параметров в соответствии с тем или иным алгоритмом оптимизации, находят такие значение параметров, при которых значение целевой функции достигает глобального или локального максимума (или минимума).
В настоящем техническом решении в качестве целевой функции может применяться среднеквадратичное отклонение модельной зависимости яркости от угла места и значений, получаемых с оптического сенсора и, например, может рассчитываться по следующей формуле:
Где C - минимизируемая целевая функция, n - индекс суммирования, N - количество объектов (направлений) для которых получена яркость в точке расположения камеры, Mn - значение яркости объекта, полученное из модели от n-ого объекта, In - значение яркости объекта, полученное с камеры от n-ого объекта.
В процессе оптимизации выбираются значения параметров из класса возможных значений, рассчитывается вид модельной функции, вычисляется среднеквадратичное отклонение. В итоге выбираются те значения параметров, которые дают минимальное значение среднеквадратичного отклонения. Из всех найденных параметров выбирается искомый параметр прозрачности.
Очевидно, что совпадение модельной и реальной яркости целевая функция будет равна 0.
Специалисту в данном уровне техники, очевидно, что может применяться любой другой метод решения так называемых задач обратного моделирования, т.е. подбора параметров модели с целью максимального соответствия предсказаний, даваемых моделью, реальным данным.
Параметрами, определяемыми методами обратного моделирования могут являться как непосредственные значения прозрачности атмосферы, так и другие параметры модели.
Согласно Фиг. 7, система определения прозрачности атмосферы может быть сконфигурирована как клиент, сервер, мобильное устройство или любое другое вычислительное устройство, которое взаимодействует с данными в системе совместной работы, основанной на сети. В самой базовой конфигурации устройство обработки данных 700, как правило, включает в себя, по меньшей мере, один процессор 701 и устройство хранения данных 702. В зависимости от точной конфигурации и типа вычислительного устройства системная память 702 может быть энергозависимой (например, оперативное запоминающее устройство (ОЗУ, RAM)), энергонезависимой (например, постоянное запоминающее устройство (ПЗУ, ROM)) или некоторой их комбинацией. Устройство хранения данных 702, как правило, включает в себя одну или более прикладных программ 703 и может включать в себя данные 704 программ. Настоящее техническое решение как способ, описанное в деталях выше, реализовано в прикладных программах 703.
Система определения прозрачности атмосферы может иметь дополнительные особенности или функциональные возможности. Например, устройство обработки данных 701 может также включать в себя дополнительные устройства хранения данных (съемные и несъемные), такие как, например, магнитные диски, оптические диски или лента. Такие дополнительные хранилища проиллюстрированы на Фиг. 7 посредством съемного хранилища 707 и несъемного хранилища 708. Компьютерные носители данных могут включать в себя энергозависимые и энергонезависимые, съемные и несъемные носители, реализованные любым способом или при помощи любой технологии для хранения информации, такой как машиночитаемые инструкции, структуры данных, программные модули или другие данные. Устройство хранения данных 702, съемное хранилище 707 и несъемное хранилище 708 являются примерами компьютерных носителей данных. Компьютерные носители данных включают в себя, но не в ограничительном смысле, оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), электрически стираемое программируемое ПЗУ (EEPROM), флэш-память или память, выполненную по другой технологии, ПЗУ на компакт-диске (CD-ROM), универсальные цифровые диски (DVD) или другие оптические запоминающие устройства, магнитные кассеты, магнитные ленты, хранилища на магнитных дисках или другие магнитные запоминающие устройства, или любую другую среду, которая может быть использована для хранения желаемой информации и к которой может получить доступ устройство обработки данных 701. Любой такой компьютерный носитель данных может быть частью системы определения прозрачности атмосферы. Система определения прозрачности атмосферы может также включать в себя устройство(а) 705 ввода, такие как клавиатура, мышь, перо, устройство с речевым вводом, устройство сенсорного ввода, и так далее. Одно или более устройства 706 вывода, такие как дисплей, динамики, принтер и тому подобное, также могут быть включены в состав системы.
Система определения прозрачности атмосферы может содержать коммуникационные соединения, которые позволяют связываться с другими вычислительными устройствами, например, по сети. Сети включают в себя локальные сети и глобальные сети наряду с другими большими масштабируемыми сетями, включая, но не в ограничительном смысле, корпоративные сети и экстрасети. Коммуникационное соединение является примером коммуникационной среды. Как правило, коммуникационная среда может быть реализована при помощи машиночитаемых инструкций, структур данных, программных модулей или других данных в модулированном информационном сигнале, таком как несущая волна, или в другом транспортном механизме, и включает в себя любую среду доставки информации. Термин «модулированный информационный сигнал» означает сигнал, одна или более из его характеристик изменены или установлены таким образом, чтобы закодировать информацию в этом сигнале. Для примера, но без ограничения, коммуникационные среды включают в себя проводные среды, такие как проводная сеть или прямое проводное соединение, и беспроводные среды, такие как акустические, радиочастотные, инфракрасные и другие беспроводные среды. Термин «машиночитаемый носитель», как употребляется в этом документе, включает в себя как носители данных, так и коммуникационные среды.
Специалисту в данной области, очевидно, что конкретные варианты осуществления способа и системы определения прозрачности атмосферы были описаны здесь в целях иллюстрации, допустимы различные модификации, не выходящие за рамки и сущности объема технического решения.
Литература
1. Зуев В.Е., Креков Г.М. Современные проблемы атмосферной оптики. Т. 4. Оптика атмосферного аэрозоля // СПб.: Гидрометеоиздат. - 1987, стр. 153-158.
2. Кузнецов Е.С. Избранные научные труды. - М: Физматлит, 2003, стр 423-430.
3. https://en.wikipedia.org/wiki/Inverse_problem
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ПОЛЕТНОЙ ДАЛЬНОСТИ ВИДИМОСТИ | 2023 |
|
RU2812498C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ О СЛЕПЯЩЕМ ВОЗДЕЙСТИИ НИЗКО РАСПОЛОЖЕННОГО СОЛНЦА НА ЭКИПАЖ ВОЗДУШНОГО СУДНА ПРИ ПОСАДКЕ | 2013 |
|
RU2565805C2 |
| Способ определения прозрачности атмосферы | 1979 |
|
SU786481A1 |
| Способ определения метеорологической дальности видимости | 2018 |
|
RU2692822C1 |
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО УДАЛЕННЫХ ОБЪЕКТОВ | 2016 |
|
RU2652535C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТЕОРОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2007 |
|
RU2344448C2 |
| МОДУЛЬНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ПАРАШЮТИСТА | 2018 |
|
RU2681241C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОЗРАЧНОСТИ АТМОСФЕРЫ | 1984 |
|
SU1314806A1 |
| Измеритель дальности видимости | 1980 |
|
SU900238A1 |

Группа изобретений относится к способу и системе определения прозрачности атмосферы, а также машиночитаемому носителю данных и может использоваться в метеорологии, в авиации, задачах видеонаблюдения. Способ определения прозрачности атмосферы, а также система определения прозрачности атмосферы и машиночитаемый носитель, включает этапы, на которых получают оптические сигналы от объектов окружающего пространства при помощи оптического сенсора, после чего определяют значение яркости по крайней мере двух направлений с различными углами места этих точек, и в итоге определяют значение прозрачности атмосферы на основании модели, связывающей определенные на предыдущем шаге значения яркости сигналов, пришедших с направлений с заданным углом места и прозрачность атмосферы. Технический результат - повышение точности определения прозрачности атмосферы с использованием датчика, расположенного в фиксированном месте, упрощение устройства определения прозрачности атмосферы. 3 н. и 16 з.п. ф-лы, 8 ил.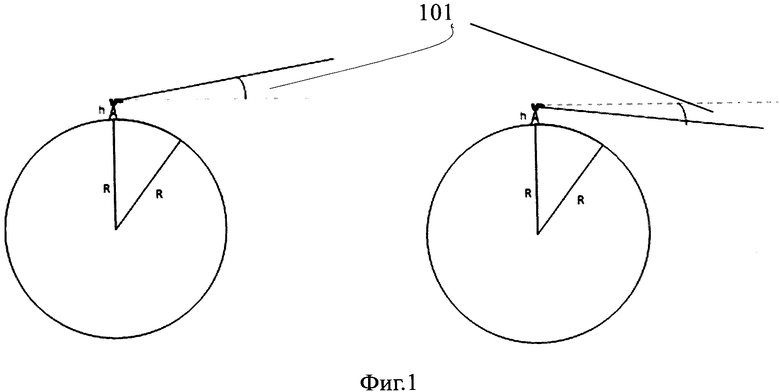
1. Способ определения прозрачности атмосферы, включающий следующие шаги:
- получают оптические сигналы от объектов окружающего пространства при помощи оптического сенсора;
- определяют значение яркости по крайней мере двух объектов, наблюдаемых с места расположения оптического сенсора под разными углами места;
- определяют значение прозрачности атмосферы на основании модели, связывающей определенные на предыдущем шаге значения яркости и прозрачность атмосферы.
2. Способ по п. 1, в котором модель использует один или комбинацию следующих параметров: положение Солнца, облачность, высота расположения оптического сенсора, однородность подстилающей поверхности, тип подстилающей поверхности, оптическая толщина атмосферы, прозрачность атмосферы, облачность, рельеф местности, параметры аэрозоля.
3. Способ по п. 2, в котором параметры аэрозоля включают один или комбинацию следующих параметров: индикатриса рассеяния, распределение частиц по высоте, метеорологические данные.
4. Способ по п. 3, в котором метеорологические данные включают один или комбинацию следующих параметров: температура, давление, направление и скорость ветра, влажность.
5. Способ по п. 1, в котором для определения значения прозрачности атмосферы используются методы решения задач обратного моделирования.
6. Способ по п. 5, в котором для определения значения прозрачности атмосферы используют методы численной оптимизации.
7. Способ по п. 1, в котором используется оптический сенсор с более чем одним приемником.
8. Способ по п. 1, в котором в качестве оптического сенсора используется видеокамера.
9. Способ по п. 1, в котором в качестве сенсора используется фиксированная видеокамера.
10. Способ по п. 1, в котором в качестве сенсора используется поворотная видеокамера.
11. Способ по п. 1, в котором используется модель горизонтальной дальности видимости.
12. Способ по п. 1, в котором используется модель негоризонтальной дальности видимости.
13. Способ по п. 1, в котором при определении значения прозрачности атмосферы используется информация о рельефе местности (карта рельефа).
14. Способ по п. 1, в котором при определении значения прозрачности атмосферы используется карта подстилающей поверхности.
15. Способ по п. 1, в котором при определении значения яркости используют сигналы, пришедшие с множества вертикальных направлений (под различными углами места).
16. Способ по п. 1, в котором при определении значения яркости используют сигналы, которые приходят с вертикальных направлений, близких к горизонту, чтобы уменьшить влияние неоднородности подстилающей поверхности.
17. Способ по п. 1, в котором при определении значения яркости используют сигналы, пришедшие с множества азимутов.
18. Система определения прозрачности атмосферы, содержащая:
- по крайней мере, один оптический сенсор;
- по крайней мере, одно устройство обработки команд;
- по крайней мере, одно устройство хранения данных;
- одну или более компьютерных программ, загружаемых в по крайней мере одно вышеупомянутое устройство хранения данных и выполняемых на по крайне мере одном из вышеупомянутых устройств обработки команд, при этом одна или более компьютерных программ содержат инструкции для выполнения способа по любому из пп. 1-13.
19. Машиночитаемый носитель данных, содержащий исполняемые одним или более устройством обработки команд машиночитаемые инструкции, которые при их исполнении реализуют выполнение способа определения прозрачности атмосферы, по любому из пп. 1-17.
| Способ определения коэффициентаОСлАблЕНия АТМОСфЕРы | 1978 |
|
SU840714A1 |
| US 4216498 A, 05.08.1980 | |||
| CN 103278479 A, 04.09.2013 | |||
| В.В | |||
| ДОРОФЕЕВ, статья "ВЛИЯНИЕ ЛАНДШАФТА МЕСТНОСТИ НА ВИДИМОСТЬ НЕСАМОСВЕТЯЩИХСЯ ОБЪЕКТОВ В ОДНОРОДНОЙ АТМСОФЕРЕ НОЧЬЮ" к журналу "ВЕСТНИК ВГУ", НОМЕР 2, 2008 ГОД | |||
| ГОРОДЕЦКИЙ А.К | |||
| статья"ЗАДАЧИ И МЕТОДИКИ ЗОНДИРОВАНИЯ АТМОСФЕРЫ ПРИ НАЗЕМНЫХ ИЗМЕРЕНИЯХ ФУРЬЕ-СПЕКТРОМЕТРОМ В ИК ДИАПАЗОНЕ" к журналу "СОВРЕМЕННЫЕ ПРОБЛЕМЫ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ ИЗ КОСМОСА", ТОМ 1, ВЫПУСК 4, 2007. | |||

