Заявляемое изобретение относится к носимым информационным системам военнослужащих и специалистов других силовых структур при одиночном или в составе группы выполнении задач в воздушно-десантных операциях на этапах управляемого спуска на парашюте и последующих действий в наземных условиях.
Известна информационная система солдата [1], выполненная в виде переносного автоматизированного рабочего места, предназначенного для передачи данных в полевых условиях, содержащего компьютер, четыре радиостанции, антенну, контроллер сопряжения и гарнитуру. Информационный обмен осуществляется цифровым способом.
Большие габариты используемых в патенте [1] компьютеров "Багет-44" допускают лишь тяжелое - ранцевое исполнение системы, которое малопригодно для воздушно-десантных действий.
Известны различные информационные системы солдат [2]: (Франция), FIST (Великобритания), Land Warrior (США) и другие. Известна также информационная система подвижного объекта [3]. Все перечисленные системы предназначены для действий военнослужащих в наземных условиях.
(Франция), FIST (Великобритания), Land Warrior (США) и другие. Известна также информационная система подвижного объекта [3]. Все перечисленные системы предназначены для действий военнослужащих в наземных условиях.
Информационные системы [2, 3] содержат компьютер, подсистемы навигации, связи, отображения информации и др., что в принципе позволяет использовать их парашютистом, но при условии дооснащения соответствующими техническими и программными средствами.
Таким образом, недостатком информационных систем [2, 3] является их пригодность только для выполнения наземных действий.
Известна информационная система парашютиста [4], предусматривающая учет характеристик парашюта, парашютиста, заданных координат точки приземления, расчет и отображение на дисплее прогнозируемой траектории спуска с использованием навигационной системы. Такая система способна указать парашютисту направление движения к целевой точке, что особенно важно в условиях плохой видимости.
Недостатки такой системы состоят в ее ограниченных функциональных возможностях, в частности, в ее пригодности только для отображения навигационной информации парашютисту при спуске. Кроме того, в описании системы [4] не рассматриваются технические аспекты ее реализации.
Наиболее близкой к заявляемому изобретению является информационная система парашютиста [5], содержащая соединенные подсистему электропитания и вычислительную подсистему, связанную через соответствующие интерфейсы с подсистемой радиосвязи, подсистемой инерциально-магнитной навигации, подсистемой спутниковой навигации, подсистемой интерактивной связи информационной системы с парашютистом в составе средств ввода информации, визуального отображения и звукового оповещения, при этом вычислительная подсистема содержит программные модули отображения на электронной карте местности целевой точки приземления и выработки сигнала тревоги, предупреждающего о возможности столкновения с взаимодействующими парашютистами.
Недостатки информационной системы [5] обусловлены ограниченными функциональными возможностями средства визуального отображения, низкими точностью приземления и безопасностью полета, а также ее моноблочным конструктивным исполнением.
Рассмотрим указанные недостатки подробнее.
Стандартный дисплей навигационного компьютера, используемый в прототипе, [5], дает только картографическое изображение подстилающей местности с отметками на нем текущего положения парашютиста, целевой точки приземления и рекомендуемой траектории движения к ней, т.е. работает подобно автомобильному навигатору. Автомобилистам известно, что задача совмещения изображения навигатора с реальным изображением окружающей местности, видимым водителю через лобовое стекло, оказывается достаточно сложной.
Система визуального отображения прототипа обладает ограниченными функциональными возможностями по обеспечению точности приземления и безопасности полета. В частности, указание на картографическом изображении целевой точки приземления и рекомендуемой траектории движения к ней может быть недостаточным для решения задачи точного приземления. С точки зрения безопасности в прототипе рассматриваются лишь сигналы предупреждения о возможном столкновении парашютистов.
Моноблочное конструктивное исполнение информационной системы прототипа не совместимо с боевой и походной выкладкой парашютиста при его оснащении табельным вооружением и штатным снаряжением. Иными словами, информационная система прототипа не сочетается с парашютной системой, боевой экипировкой парашютиста и не пригодна для применения на всех этапах воздушно-десантных действий.
Задачей, решаемой заявляемым изобретением, является улучшение приспособленности информационной системы к решению боевых, спасательных, специальных и других задач по целевому назначению парашютиста.
Для решения этой задачи в информационной системе парашютиста, содержащей соединенные подсистему электропитания и вычислительную подсистему, связанную через соответствующие интерфейсы с подсистемой радиосвязи, подсистемой инерциально-магнитной навигации, подсистемой спутниковой навигации, подсистемой интерактивной связи информационной системы с парашютистом в составе средств ввода информации, визуального отображения и звукового оповещения, при этом вычислительная подсистема содержит программные модули отображения на электронной карте местности целевой точки приземления и выработки сигнала тревоги, предупреждающего о возможности столкновения с взаимодействующими парашютистами, в качестве средства визуального отображения используется нашлемное средство дополненной реальности, совмещающее видимое парашютистом реальное изображение подстилающей местности с формируемыми программными модулями вычислительной подсистемы изображениями трехмерных электронной карты, зоны досягаемости целевой точки приземления и положения взаимодействующих парашютистов, программный модуль выработки сигнала тревоги дополнен функцией предупреждения о столкновении с подстилающей поверхностью, при этом подсистема электропитания, вычислительная подсистема, подсистемы радиосвязи, инерциально-магнитной и спутниковой навигации, а также средства ввода информации в составе многофункционального и оперативного пультов управления выполнены в виде отдельных модулей, встроенных в транспортный модульный жилет парашютиста, причем модули радиосвязи и спутниковой навигации размещены в наплечных фиксаторах жилета, модули многофункционального и оперативного пультов управления размещены в подсумках на грудной секции жилета, а модули электропитания, вычислительный и инерциально-магнитной навигации - в подсумках на поясной части жилета.
Существенными отличительными признаками заявляемого изобретения по сравнению с прототипом являются:
1. Использование в качестве средства визуального отображения нашлемного средства дополненной реальности позволяет высвободить руки парашютиста для управления парашютом и выполнения наземных действий.
В прототипе используется стандартный дисплей навигационного компьютера, расположенный на груди парашютиста, и/или монокулярный наглазный дисплей. Такое расположение занимает руки и затрудняет обзор. Монокулярный наглазный дисплей не удобен в применении, поскольку одновременное наблюдение парашютистом двух изображений разными глазами для человека затруднительно и приводит к его быстрой утомляемости.
2. Нашлемное средство дополненной реальности, совмещающее видимое парашютистом реальное изображение подстилающей местности с формируемым программным модулем вычислительной подсистемы изображением трехмерной электронной карты, позволяет парашютисту более уверенно ориентироваться в пространстве, используя реальную и виртуальные картины.
В прототипе используется либо картографическая картина на экране дисплея, либо видимое реальное изображение местности, совместить которые не всегда просто.
3. Нашлемное средство дополненной реальности с отображением формируемой программным модулем вычислительной подсистемы зоны досягаемости целевой точки приземления позволяет парашютисту постоянно контролировать свое текущее положение в пространстве, зная коридор возможностей достижения точки приземления.
В прототипе отображается лишь одна желаемая траектория движения парашютиста.
4. Нашлемное средство дополненной реальности с отображением формируемого программным модулем вычислительной подсистемы положения взаимодействующих парашютистов позволяет контролировать групповой полет и взаимодействие парашютистов.
В прототипе такой возможности нет.
5. Наличие программного модуля выработки сигнала тревоги с функцией предупреждения о столкновении с подстилающей поверхностью позволяет сообщить парашютисту об опасном сближении с землей, например, в условиях ограниченной видимости. Особенно это важно при огибании рельефа горной или сильно пересеченной местности. Данная функция предупреждения повышает безопасность полета парашютиста. В прототипе такой режим не предусмотрен.
6. Модульное исполнение информационной системы парашютиста обеспечивает простоту разработки и удобство эксплуатации.
В прототипе используется моноблочное исполнение.
7. Расположение подсистем информационной системы парашютиста в транспортном модульном жилете позволяет распределить весовую нагрузку на парашютиста, обеспечивая повышение его боеспособности.
В прототипе моноблочное исполнение делает его малопригодным для практического использования парашютистом как при спуске, так и при наземных действиях.
8. Размещение модулей радиосвязи и спутниковой навигации в наплечных фиксаторах жилета обеспечивает высокое качество связи и навигации при любом пространственном положении парашютиста, особенно в наземных условиях.
В прототипе такая проблема не рассматривается.
9. Средства ввода информации выполнены в виде многофункционального и оперативного пультов управления. Первый из них обеспечивает полнофункциональное, а второй - упрощенное управление информационной системой в экстремальных случаях.
В прототипе используется один пульт, совмещенный с моноблоком.
10. Модули многофункционального и оперативного пультов управления размещены в подсумках на грудной секции жилета, т.е. в месте, удобном для быстрого извлечения.
В прототипе средства ввода размещены на моноблоке.
11. Модули электропитания, вычислительный и инерциально-магнитной навигации размещены в подсумках на поясной части жилета. Эти блоки обладают наибольшим весом, а указанное их размещение позволяет улучшить распределение весовой нагрузки на парашютиста, что особенно важно при наземных действиях.
В прототипе все блоки размещены совместно, на груди парашютиста, т.е. в неудобном положении, особенно при наземных действиях.
Указанные отличительные признаки позволяют повысить безопасность полета, точность приземления и удобство использования
В совокупности все отличительные признаки обеспечивают получение общего технического результата, заключающегося в повышении эффективности информационной системы парашютиста, характеризующей степень приспособленности системы к выполнению боевых, спасательных, специальных и других задач по целевому назначению парашютиста.
Заявляемое изобретение иллюстрируют следующие графические материалы.
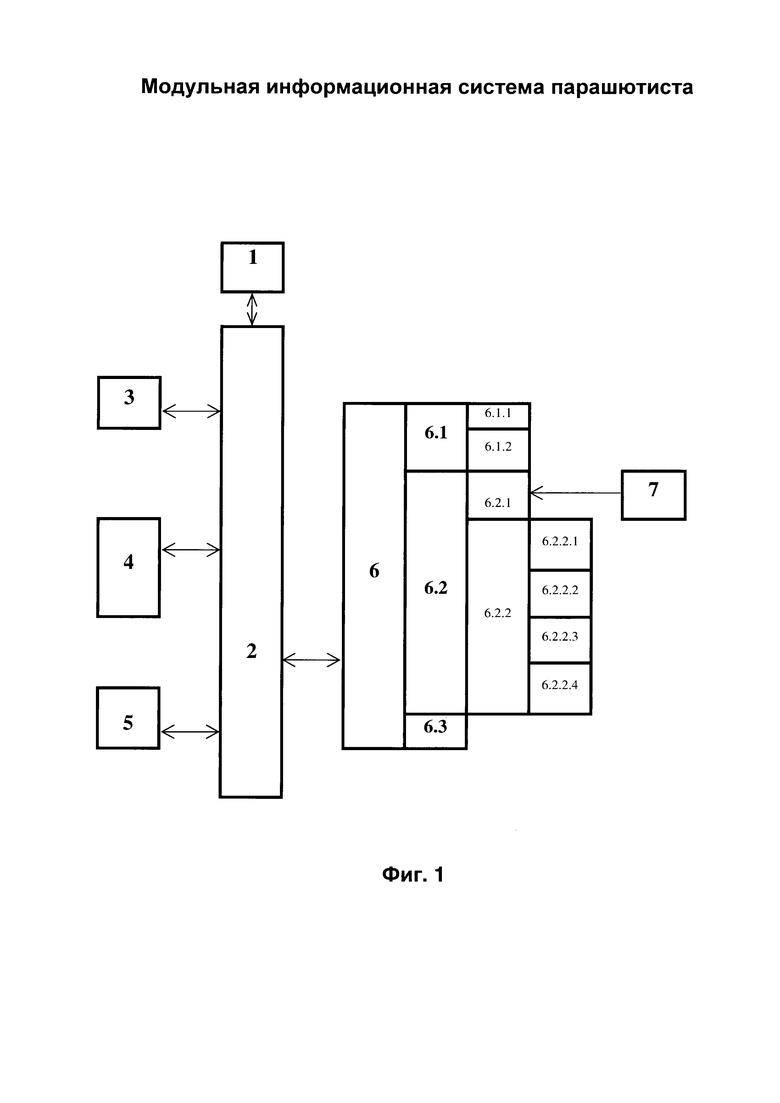
Фиг. 1. Структурная схема модульной информационной системы парашютиста, где:
1. Модуль электропитания.
2. Вычислительный модуль.
3. Модуль радиосвязи.
4. Модуль инерциально-магнитной навигации.
5. Модуль спутниковой навигации.
6. Подсистема интерактивной связи информационной системы с парашютистом:
6.1. Средства ввода информации:
6.1.1. Модуль многофункционального пульта управления.
6.1.2. Модуль оперативного пульта управления.
6.2. Средство визуального отображения в виде нашлемного средства дополненной реальности:
6.2.1. Шлем с очками и блоком угловой ориентации.
6.2.2. Программные модули вычислительного модуля:
6.2.2.1. Модуль формирования изображения трехмерной электронной карты.
6.2.2.2. Модуль формирования изображения трехмерной зоны досягаемости целевой точки приземления.
6.2.2.3. Модуль формирования изображения трехмерного положения взаимодействующих парашютистов.
6.2.2.4. Модуль формирования сигналов тревоги, предупреждающих о столкновении с взаимодействующими парашютистами и подстилающей поверхностью.
6.3. Средство звукового оповещения.
7. Видимое парашютистом реальное изображение подстилающей местности.
Структурная схема, Фиг. 1, имеет условный характер, поскольку средства и модули выполнены в виде совокупности аппаратуры и программного обеспечения, реализованного в вычислительном модуле 2.
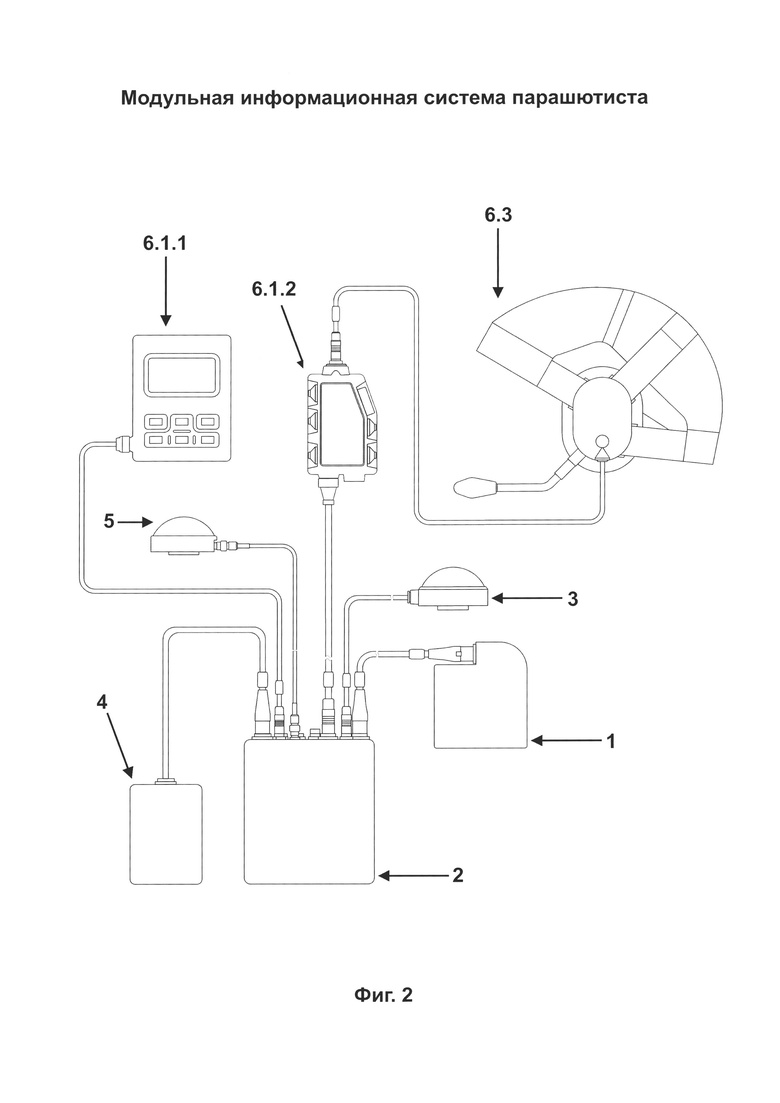
Фиг. 2. Модули информационной системы и связи между ними (нашлемное средство дополненной реальности не показано), где:
1. Модуль электропитания.
2. Вычислительный модуль.
3. Модуль радиосвязи.
4. Модуль инерциально-магнитной навигации.
5. Модуль спутниковой навигации.
6.1.1. Модуль многофункционального пульта управления.
6.1.2 Модуль оперативного пульта управления.
6.3. Средство звукового оповещения в виде телефонно-микрофонной гарнитуры с оголовком.
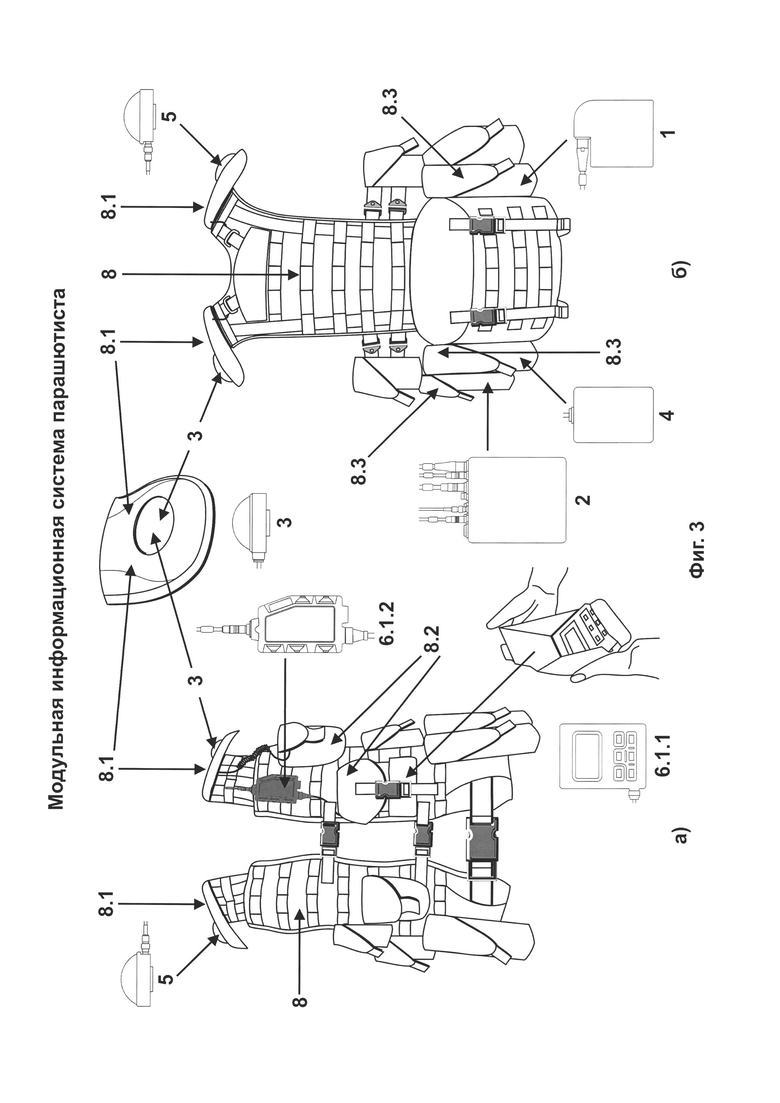
Фиг. 3. Транспортный модульный жилет 8 с встроенными модулями (а) - вид спереди, б) - вид сзади), где:
8.1. Наплечные фиксаторы.
8.2. Грудные подсумки.
8.3. Поясные подсумки.
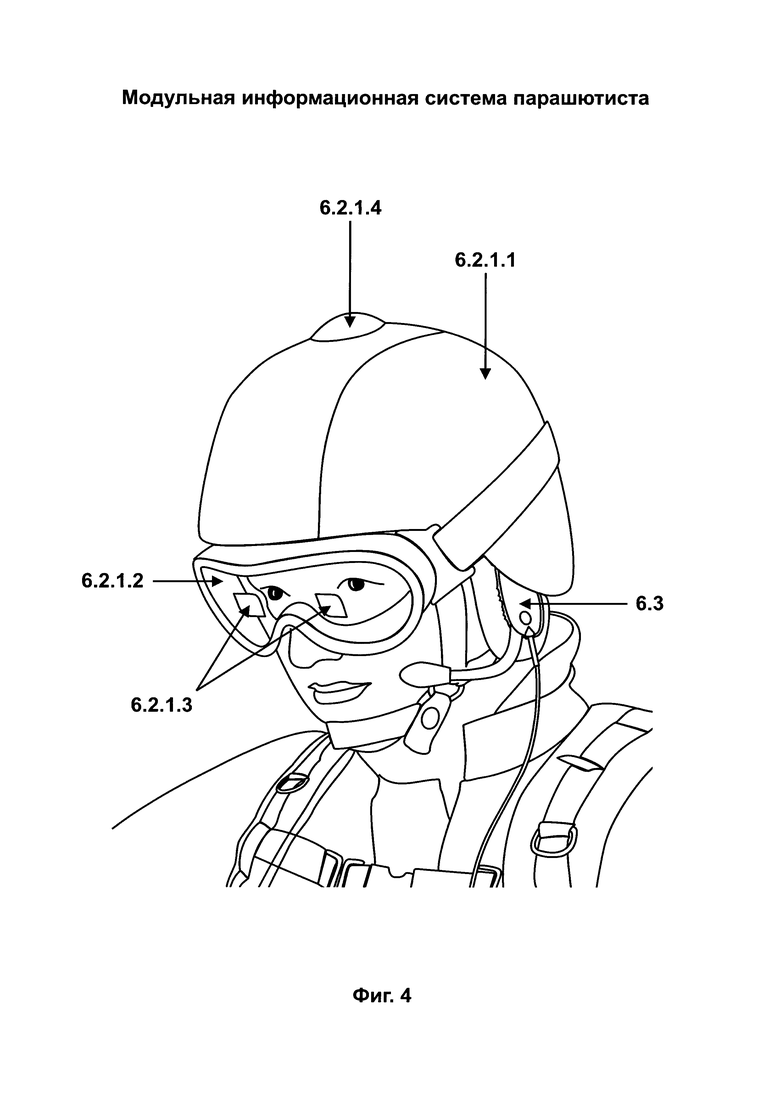
Фиг. 4. Шлем 6.2.1 с очками и блоком угловой ориентации, где:
6.2.1.1. Штатный шлем парашютиста.
6.2.1.2. Бинокулярные прозрачные защитные очки.
6.2.1.3. Прозрачные (полупрозрачные) микродисплеи с проекторами.
6.2.1.4. Блок угловой ориентации головы парашютиста.
6.3. Средство звукового оповещения в виде телефонно-микрофонной гарнитуры.
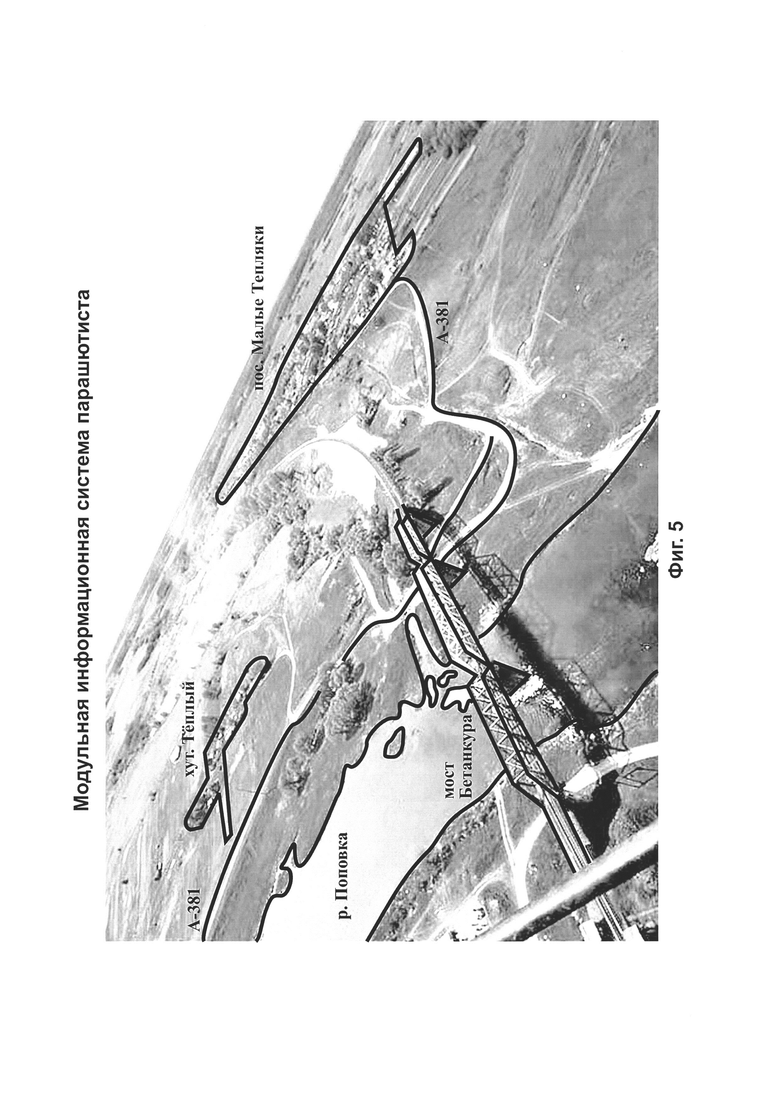
Фиг. 5. Пример совмещения виртуальных ориентиров с видимыми изображениями реальных объектов подстилающей местности.
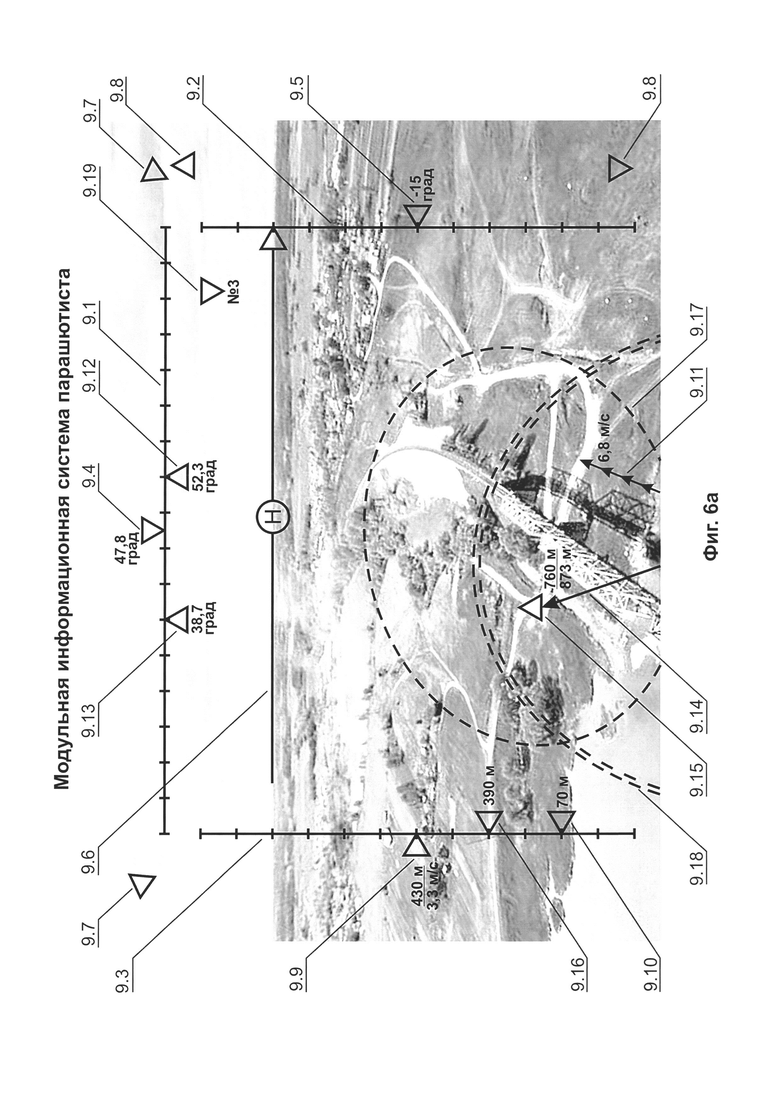
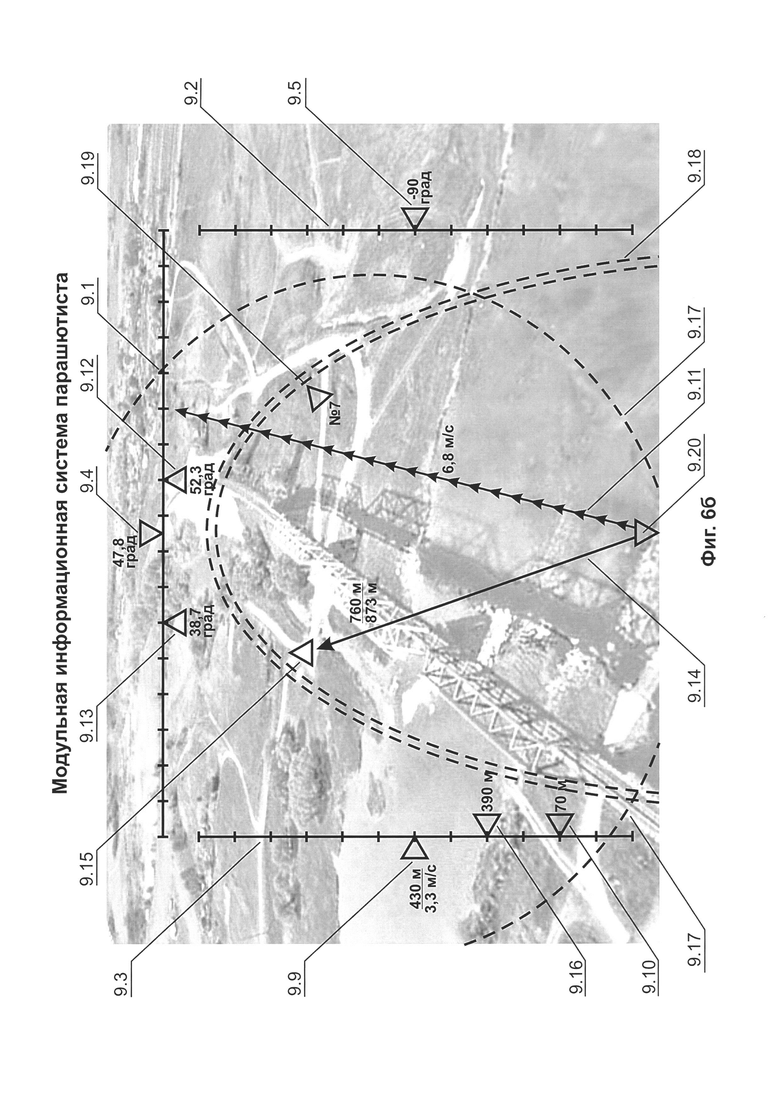
Фиг. 6. Информационно-управляющие символы и отметки 9, используемые в нашлемном средстве дополненной реальности (Фиг. 6а - оптическая ось нашлемного средства вблизи плоскости местного горизонта, Фиг. 6б - оптическая ось направлена вниз по местной вертикали).
Рассмотрим возможность реализации заявляемой информационной системы парашютиста.
Практическая реализация элементов (модулей) информационной системы 1-5, 6.1, 6.3, Фиг. 2, не представляет сложности, поскольку все они являются обычными устройствами с функциями, соответствующими их названиям, и известными способами построения. Кратко остановимся на выполняемых ими функциях.
Модуль электропитания 1 является автономным источником первичной электроэнергии информационной системы. Вычислительный модуль 2 выполняет функцию хранения, обработки и распространения через соответствующие интерфейсы всех видов информации, циркулирующей в информационной системе парашютиста, а также преобразования электроэнергии модуля электропитания 1 в линейку вторичных питающих напряжений (дифференцировано) для всех элементов системы.
Модуль радиосвязи 3 совместно с аналогичными модулями других парашютистов группы образуют постоянно действующую беспроводную динамическую сеть (MANET-сеть) для радиообмена речевыми сообщениями и данными, например, на основе известного стандарта 802.11/b/g/n.
Совместное (комплексное) применение модулей 4, 5, реализующих известные способы инерциально-магнитной и спутниковой навигации, обеспечивает надежное высокоточное определение параметров движения центра масс парашютиста - его текущих плановых координат X, Y, широты В, долготы L и высоты Н в системе координат СК-42 или какой-либо другой системе отсчета (например, ПЗ-90 или WGS-84), принятой в РФ для топографических, геодезических и навигационных определений.
Также модулем спутниковой навигации 5 определяются текущие координаты XГ, YГ, ZГ и составляющие вектора скорости Vx, Vy, Vz центра масс парашютиста в прямоугольной геоцентрической (например, Гринвичской) системе координат, а также путевая скорость VП и путевой угол αП парашютиста.
Средства ввода информации 6.1 в составе модулей многофункционального 6.1.1 и оперативного 6.1.2 пультов управления выполняют функцию ввода информации и управления информационной системой.
Модуль 6.1.2, построенный по принципу «палец-кнопка», задействуется на всех этапах воздушно-десантных действий, начиная с подготовительного на земле и на борту воздушного судна, при покидании судна в процессе полета парашютиста и после его приземления на этапах последующих действий в наземных условиях. Пять кнопок модуля предназначены для включения/выключения информационной системы, подачи сигнала о ранении, переключения тангенты, начала передачи цифровых данных и управления работой дополнительного внешнего устройства, подключаемого к информационной системе через универсальный разъем модуля 6.1.2. Последняя пятая кнопка заранее программируется для конкретного внешнего устройства, тип которого (техническое средство разведки, радиостанция спутниковой или УКВ связи, терминал управления БЛА и др.) определяется воинской специальностью парашютиста.
Модуль 6.1.1 задействуется на подготовительном и последующих (после приземления) наземных этапах воздушно-десантных действий. Этот модуль используется для задания режимов (с помощью соответствующих кнопок) и индикации (на ЖК-индикаторе модуля) результатов работы информационной системы. Режимы работы определяют выбор используемых спутниковых навигационных систем (ГЛОНАСС, GPS или совместно), варианты маршрутов дальнейшего движения парашютиста после приземления, параметры и режимы работы подключаемых средств радиосвязи, индикацию разряда модуля электропитания 1 и др. Также с помощью этого модуля программируется пятая кнопка модуля 6.1.2.
Средство звукового оповещения 6.3 - стандартная миниатюрная телефонно-микрофонная гарнитура - встроена в защитный шлем средства дополненной реальности, рассматриваемого далее. Гарнитура предназначена для восприятия при передаче и воспроизведения при приеме модулем радиосвязи 3 речи (голосовых сообщений), а также озвучивания принимаемых и формируемых вычислительным модулем 2 стандартных и произвольных буквенно-цифровых сообщений (сигналов тревоги и т.п.).
Как указано ранее, элементы информационной системы 1-5, 6.1 реализованы в модульном исполнении, широко применяемом при конструировании и серийном производстве аппаратуры современных радиоэлектронных и информационных систем. Модули имеют кабельное соединение (сочленение) с общим для всех вычислительным модулем 2, чем обеспечивается их конструктивное и функциональное единство. Кабели уложены в фиксаторы и протяженные клапаны (кабельные каналы), расположенные на транспортном модульном жилете. Также на жилете в соответствующих наплечных фиксаторах и нагрудных и поясных подсумках размещены указанные модули информационной системы, Фиг. 3. В качестве технологии конструктивного исполнения жилета могут быть использованы решения, реализованные в патентах [6, 7], где модульность обеспечивается рациональным размещением на жилете навесных фиксаторов 8.1, клапанов и карманов-подсумков 8.2, 8.3.
Важно подчеркнуть, что при практическом использовании подвесная система парашютиста размещается поверх транспортного модульного жилета со встроенными информационными модулями. Это обеспечивает немедленное ее снятие (отсоединение) после приземления и перевод информационной системы, вооружения и снаряжения парашютиста в боевое положение без дополнительной подготовки и выполнения каких-либо трудоемких операций.
Рассмотрим более подробно средство визуального отображения 6.2 в виде нашлемного средства дополненной реальности.
Аппаратурной основой средства дополненной реальности является шлем 6.2.1 с очками и блоком угловой ориентации, состоящий, Фиг. 4, из штатного шлема парашютиста 6.2.1.1 и закрепленных на нем бинокулярных прозрачных защитных очков дополненной реальности 6.2.1.2 с двумя вставками - прозрачными (полупрозрачными) микродисплеями с проекторами 6.2.1.3 и инерциального блока угловой ориентации головы парашютиста 6.2.1.4 (на Фиг. 4 под обтекателем), определяющего положение его оси зрения в инерциальном пространстве. Видеосигнал, проецируемый на микродисплеи очков, формируется программными модулями 6.2.2 вычислительного модуля 2 на основе данных о местоположении, высоте и скорости парашютиста и других парашютистов группы, получаемых от модулей инерциально-магнитной 4 и спутниковой 5 навигации, данных об угловом положении головы от блока 6.2.1.4, а также данных о характеристиках используемой парашютной системы, антропометрических параметрах парашютиста и внешних условиях его полета, закладываемых заранее перед прыжком или определяемых в ходе полета.
В качестве технологии изготовления очков дополненной реальности 6.2.1.2 может быть применено решение компании Epson, реализованное в прозрачных бинокулярных видеоочках дополненной реальности Moverio ВТ-300, оснащенных микродисплеями Si-OLED с пикопроекторами.
Реализация блока угловой ориентации 6.2.1.4 не представляет сложности, поскольку блок может строиться на основе выполненных по МЭМС-технологии типовых инерциальных измерительных устройств (Inertial measurement unit, IMU), объединяющих трехосевые гироскоп, акселерометр и инклинометр, а также (опционально) барометр и измеритель температуры. Примером такого IMU является комбинированный инерциальный датчик STIM 300 компании Sensonor, по техническим и массогабаритным (55 г) характеристикам соответствующий задачам блока угловой ориентации головы парашютиста.
Программной основой средства дополненной реальности являются программные модули 6.2.2. Остановимся на них подробно.
Основным назначением средства дополненной реальности является обеспечение визуального ориентирования парашютиста в полете путем отображения на стеклах (микродисплеях) защитных очков виртуальных ориентиров - зрительных эквивалентов реальных наземных объектов в виде их изображений, контуров или условных графических символов (пиктограмм), угловое положение и размеры которых соответствуют реальным объектам: лесным массивам, рекам, мостам, зданиям, объектам инфраструктуры и т.п. Ориентиры формируются программным модулем 6.2.2.1 в виде проекции на плоскость, ортогональную оси зрения парашютиста (оптической оси защитных очков), участка трехмерной электронной карты подстилающей местности с целевой точкой приземления, попадающего в поле зрения очков. При этом ориентация, масштаб и степень перспективы проекции, являющейся по существу плоским изображением требуемого трехмерного участка карты, автоматически подбираются по данным о текущих местоположении, высоте и скорости полета, а также угловом положении головы (оси зрения) парашютиста таким образом, чтобы контуры виртуальных ориентиров максимально близко совпадали с их реальными эквивалентами.
В случае, если при текущем положении головы парашютиста линия визирования целевой точки приземления выходит за пределы поля зрения очков, формируется и отображается символ, показывающий кратчайшее направление поворота нашлемного средства (за счет изменения курса и/или поворота головы) для возвращения линии визирования в пределы поля зрения очков.
При хорошей видимости виртуальные ориентиры накладываются (совмещаются) на видимые сквозь очки парашютиста изображения реальных объектов подстилающей местности, выполняя функцию дополнительного информирования (например, отображение наименования объекта). Пример наложения виртуальных ориентиров на видимые изображения реальных объектов приведен на Фиг. 5.
В условиях плохой видимости (ночь, туман, дым), когда реальное изображение недоступно, виртуальные ориентиры заменяют реальные и позволяют парашютисту сохранять пространственную ориентацию, избегать столкновений с препятствиями и безопасно следовать к заданной целевой точке приземления. Последнее особенно важно на заключительном участке «слепого» полета в горной и сильно пересеченной местности, а также местах плотной застройки зданиями и объектами инфраструктуры.
Процедура получения плоской проекции требуемого участка трехмерной электронной карты обеспечивается реализацией в модуле 6.2.2.1 существующих программных средств, используемых в 3D-конвейерах для рендеринга (прорисовки, визуализации) трехмерных моделей. Результатом рендеринга является цифровое растровое изображение требуемого участка, сохраняющее признаки объемности (трехмерности), а именно: правильную очередность заслоняющих друг друга объектов, правильное затенение и эффект перспективы. Этим изображение принципиально отличается от топографических карт и фотопланов.
Указанная процедура требует закладки в память вычислительного модуля 2 трехмерной электронной карты планируемой зоны (области подстилающей местности) действий парашютиста. Карта предварительно (перед полетом) строится 3D-конвейером средствами векторной графики. При этом должна быть предусмотрена возможность интерактивного встраивания в карту рассчитываемых в ходе полета трехмерных зоны досягаемости целевой точки приземления и отметок положения взаимодействующих парашютистов, а также сигналов предупреждения о столкновении с взаимодействующими парашютистами и подстилающей поверхностью.
Возможен вариант одновременного построения в ходе полета растрового изображения объединенной трехмерной модели требуемого участка электронной карты, зоны досягаемости целевой точки и отметок положения парашютистов, не требующий их интерактивного встраивания в предварительно заложенную карту. Для реализации такого единого процесса формирования изображения могут использоваться современные геоинформационные системы (ГИС), например, такие как полная версия отечественной ГИС «Панорама» и ее военный аналог ГИС «Оператор».
Процесс формирования визуальных ориентиров дополненной реальности требует наличия в составе вычислительного модуля 2 высокопроизводительных процессора и видеоадаптера с 3D-ускорителем. Реализация этого требования не представляет сложности, поскольку современные носимые вычислительные средства этими компонентами в большинстве случаев обладают.
Программный модуль 6.2.2.2 в процессе спуска парашютиста рассчитывает трехмерную зону досягаемости целевой точки приземления и встраивает ее в формируемый модулем 6.2.2.1 участок трехмерной электронной карты, находящийся в поле зрения защитных очков. В результате на стеклах (микродисплеях) очков отображается суммарная проекция, объединяющая объемные изображения участка карты и зоны досягаемости.
В основном режиме полета парашютиста, обеспечивающем приземление в целевой точке подстилающей местности, зона досягаемости представляет собой конус возможностей парашютного купола - участок воздушного пространства, ограниченный трехмерной поверхностью в виде конуса с вершиной в заданной целевой точке приземления и горизонтальным основанием, находящемся в плоскости, проходящей через центр масс парашютиста. Угол между осью и образующей косинуса рассчитывается по формуле:

где K - аэродинамическое качество купола, зависящее от типа парашютной системы (для управляемых парашютов с круглым куполом K=0,25…1; для планирующих парашютов типа «крыло» K=2…2,5; для парашютных систем специального назначения, построенных по схеме параплана, K=3…8). Значение K может задаваться перед прыжком в зависимости от типа используемого парашюта или рассчитываться с требуемой точностью непосредственно в процессе управляемого спуска по формуле:

где Vпср - среднее значение путевой скорости Vп в процессе снижения на прямолинейном участке полета, Vhср - средняя скорость снижения на участке измерения Vпср. Прямолинейный участок полета фиксируется по постоянству путевого угла αп. Путевые скорость Vп и угол αп определяются модулем спутниковой навигации 5. Средняя скорость Vhср рассчитывается численным дифференцированием текущей высоты Н, также определяемой этим модулем.
Ось конуса возможностей купола лежит в плоскости створа ветра и отклонена от местной вертикали в точке приземления на угол, рассчитываемый по формуле:

где Wcp - средняя горизонтальная скорость ветра. Находясь внутри конуса возможностей купола, парашютист имеет возможность приземлиться в заданной целевой точке; выйдя за пределы конуса возможностей, он этого сделать не может. На границе конуса возможностей для достижения заданной точки парашютист должен спускаться только по прямолинейной траектории с вектором путевой скорости Vп, направленным на точку приземления.
В процессе спуска скорость Wcp может рассчитываться по предварительно заложенному в память вычислительного модуля 2 высотному профилю скорости ветра W в зависимости от высоты полета Н, либо измеряться (за вычетом путевой скорости Vп) с помощью портативного анемометра, устанавливаемого на транспортном жилете парашютиста (опционально). Существует широкая линейка таких анемометров. Примером может служить электронный мини анемометр WindLiner ANI-20 компании MetronX с внешним малогабаритным выносным датчиком крыльчатого типа. Его характеристики (диапазон измерения скорости воздушного потока 0…45 м/с, погрешность не более ±3%, осреднение по выборке измерений) соответствуют задачам воздушного десантирования.
Возможен режим полета, обеспечивающий приземление парашютиста в точке подстилающей местности, оперативно выбранной непосредственно в процессе полета и наблюдаемой визуально. В этом случае зона досягаемости представляет собой участок подстилающей местности, находящийся внутри конической поверхности с вершиной в текущем положении центра масс парашютиста. Угол между осью и образующей конуса, а также отклонение оси конуса от местной вертикали в районе центра масс парашютиста в плоскости створа ветра рассчитываются по тем же формулам, что и в режиме обеспечения приземления в заданной целевой точке.
Если наблюдаемая визуально точка подстилающей местности находится внутри очерченной зоны, парашютист имеет возможность приземления в выбранной точке. Участки подстилающей местности вне очерченной зоны недосягаемы. В этом случае парашютист должен принимать оперативные решения по перенацеливанию в другие альтернативные досягаемые точки приземления.
Программный модуль 6.2.2.3 каждому парашютисту группы, попадающему в поле зрения защитных очков, а также их носителю, ставит в соответствие трехмерный вектор положения его центра масс, например, в виде определяемых модулем спутниковой навигации 5 текущих координат ХГ, YГ, ZГ в геоцентрической системе отсчета, с последующим преобразованием каждого вектора в систему координат, в которой средствами векторной графики строятся трехмерные модели участка электронной карты и зоны досягаемости. Далее каждый преобразованный вектор встраивается в указанные трехмерные модели, в результате чего путем их проецирования на стеклах (микродисплеях) очков на фоне объемного изображения участка карты одновременно или поочередно отображаются зона досягаемости целевой точки приземления и отметки (пиктограммы) положения взаимодействующих парашютистов.
Очередность отображения задается предварительно заложенной в вычислительный модуль 2 последовательностью переключения виртуальных изображений, либо путем самостоятельного нажатия парашютистом пятой кнопки модуля оперативного пульта управления 6.1.2 для их переключения или отключения при достаточности реального изображения, исходя из удобства наблюдения окружающей обстановки. Кнопка для этой функции заранее программируется с помощью модуля многофункционального пульта управления 6.1.1. После приземления парашютиста эта кнопка тем же способом оперативно перепрограммируется на работу с приданным внешним устройством (например, техническим средством разведки), необходимым для выполнения наземной стадии воздушно-десантных действий.
Сигналы предупреждения о столкновении с взаимодействующими парашютистами формируются программным модулем 6.2.2.4 по данным о параметрах движения парашютистов группы, постоянный обмен которыми обеспечивается беспроводной динамической сетью (MANET-сетью), образованной группой модулей радиосвязи 3. Для этого вычислительный модуль 2 каждого i-го парашютиста производит текущий расчет интервала времени схождения с другими парашютистами по формуле:

где N - число парашютистов в группе,
 - расстояние между i-ым и j-ым парашютистами,
- расстояние между i-ым и j-ым парашютистами,
 - их взаимная скорость. Здесь
- их взаимная скорость. Здесь  - текущие геоцентрические координаты и составляющие вектора скорости парашютистов, определяемые их модулями спутниковой навигации 5.
- текущие геоцентрические координаты и составляющие вектора скорости парашютистов, определяемые их модулями спутниковой навигации 5.
Интервалы τij сравниваются с предельно допустимым значением τдоп. При выполнении хотя бы одного неравенства

вырабатывается сигнал предупреждения о столкновении, который в виде символов на микродисплеях очков и звукового оповещения через телефон гарнитуры доводится до парашютиста. При этом сообщается порядковый номер «опасного» соседа (соседей) и его пространственное положение: в поле зрения защитных очков или за его пределами. Последнее необходимо для правильных действий парашютиста по предотвращению столкновений в «слепой» зоне.
Для начального участка прыжка величина τдоп принимается равной минимально допустимому интервалу покидания парашютистами воздушного судна, определяемому, например, «Руководством по воздушно-десантной подготовке (2008 г.)» подразделений ВДВ РФ. В частности, для скоростных воздушных судов (Ан-26, Ан-12, Ил-76) величина τдоп равна 0,7…1 с; для низкоскоростных (Ан-2, Ми-6, Ми-8) - 2…3 с. По мере снижения парашютистов и уменьшения их скорости величина τдоп последовательно увеличивается до 3…10 начальных значений.
Формирование модулем 6.2.2.4 сигнала предупреждения о столкновении с подстилающей поверхностью проводится путем текущего расчета интервала времени достижения парашютистом поверхности Земли по формуле:

где Н - высота полета, Vh - вертикальная составляющая скорости парашютиста (скорость снижения).
Важно отметить, что для обеспечения высокой точности расчета времени, необходимой для безопасного маневрирования по высоте на заключительном участке спуска и приземления, при определении текущей высоты Н, помимо данных от модулей инерциально-магнитной 4 и спутниковой 5 навигации, используются уточняющие данные о высотном рельефе местности в районе целевой точки, содержащиеся в заложенной в память вычислительного модуля 2 трехмерной электронной карте планируемой зоны действий парашютиста. Кроме того, в отличие от использованного в модуле 6.2.2.2 расчета вертикальной скорости численным дифференцированием текущей высоты Н, здесь применяется более точная процедура расчета:

где V - модуль вектора текущей скорости парашютиста, равный  VП - путевая (горизонтальная) скорость. Как и ранее, составляющие скорости VX, VY, VZ, VП определяются модулем спутниковой навигации 5.
VП - путевая (горизонтальная) скорость. Как и ранее, составляющие скорости VX, VY, VZ, VП определяются модулем спутниковой навигации 5.
Сигнал предупреждения вырабатывается при выполнении неравенства

где допустимое значение  задается, исходя из характеристик используемой парашютной системы и степени подготовки парашютиста.
задается, исходя из характеристик используемой парашютной системы и степени подготовки парашютиста.
Сформированный сигнал предупреждения о столкновении с подстилающей поверхностью доводится до парашютиста с помощью символов и звукового оповещения.
Приведенные соотношения (1)-(8) не представляют сложности и могут быть реализованы в реальном масштабе времени вычислительным модулем 2.
Управляемый спуск парашютиста в общем виде заключается в удержании траектории полета в пределах зоны досягаемости и оперативном маневрировании при получении сигналов предупреждения о столкновении. Для этого парашютисту достаточно видимого через защитные очки реального изображения окружающей обстановки, отображаемых на стеклах (микродисплеях) очков объемных изображений участка электронной карты и виртуальных ориентиров, зоны досягаемости и положения взаимодействующих парашютистов, доводимых до него символов и отметок, а также звукового оповещения. Рассмотрим процесс управления парашютной системой более подробно.
В нашлемном средстве дополненной реальности используются следующие информационно-управляющие символы и отметки, Фиг. 6а:
- общего назначения;
- отображения положения оптической оси нашлемной системы;
- отображения положения и параметров спуска парашютиста;
- обеспечения приземления в целевой (выбранной) точке;
- отображения зон досягаемости;
- отображения взаимодействующих парашютистов;
- предупреждения о столкновении.
Указанные символы и отметки формируются совместной работой программных модулей 6.2.2.2-6.2.2.4.
К символам общего назначения относятся подвижные шкалы азимута 9.1, угла места 9.2 и высоты 9.3. В центре подвижной шкалы азимута 9.1 отображается текущее положение оптической оси нашлемной системы по азимуту, а ее правая и левая границы соответствуют текущим значениям границ поля зрения системы отображения по азимуту. В центре подвижной шкалы угла места 9.2 отображается текущее положение оптической оси нашлемной системы по углу места, а ее верхняя и нижняя границы соответствуют текущим значениям границ поля зрения системы отображения по углу места. В центре подвижной шкалы высоты 9.3 отображается текущая высота парашютиста над поверхностью земного эллипсоида, а ее верхняя и нижняя границы соответствуют запасам высоты для принятия решения парашютистом (±100…200 м относительно текущего значения высоты).
Символы отображения положения нашлемной системы включают в свой состав неподвижные символы с численными значением текущего азимута 9.4 и угла места 9.5 оптической оси нашлемной системы, расчетной линии местного горизонта 9.6, а также символы направления поворота нашлемной системы в рабочую область по азимуту 9.7 и углу места 9.8.
Символы 9.4 и 9.5 находятся посередине видимых участков шкал 9.1 и 9.2, которые в свою очередь отображаются (сдвигаются) так, чтобы текущие значения углового положения нашлемной системы в пространстве на шкалах 9.1 и 9.2 находились напротив острия указателей 9.4 и 9.5. Одновременно рядом с символами указателей 9.4 и 9.5 отображаются соответствующие значения углового положения нашлемной системы в цифровой форме.
Линия местного горизонта 9.6 отображает расчетное положение местного горизонта для текущих координат парашютиста и положения оптической оси нашлемной системы отображения. При выходе местного горизонта за пределы поля зрения системы отображения (при сильных наклонах головы) линия 9.6 не отображается.
Символы 9.7 и 9.8 показывают кратчайшее направление поворота нашлемной системы путем разворота парашютиста и/или поворота его головы для того, чтобы расчетное положение линии визирования целевой точки приземления вошло в поле зрения нашлемной системы. При нахождении расчетного положения целевой точки приземления в поле зрения нашлемной системы символы 9.7 и 9.8 не отображаются.
К символам отображения положения и параметров спуска парашютиста относятся неподвижный символ с численным значением текущего значения высоты парашютиста над поверхностью земного эллипсоида по данным спутниковой навигационной системы 9.9, подвижный символ текущего значения высоты рельефа подстилающей местности под парашютистом по данным электронной карты 9.10, отметка линии пути при текущем курсе парашютиста 9.11, подвижная метка истинного курса полета парашютиста 9.12.
Символ 9.9 находится посередине видимого участка шкалы 9.3, которая в свою очередь отображается (сдвигается) так, чтобы текущее значение высоты парашютиста находилось напротив острия указателя 9.9. Одновременно рядом с символом 9.9 отображаются значения высоты и вертикальной скорости в цифровой форме.
Острие указателя подвижного символа 9.10 на шкале 9.3 находится напротив значения высоты рельефа подстилающей поверхности над поверхностью земного эллипсоида в точке под парашютистом в соответствии с данными матрицы высот электронной карты местности. Одновременно рядом с символом 9.10 высота рельефа отображается в цифровой форме. При нахождении текущего значения высоты рельефа вне видимого участка шкалы 9.3 символ 9.10 не отображается.
Отметка 9.11 отображает на видимом изображении подстилающей местности попадающий в поле зрения нашлемной системы участок прогнозируемой линии фактического пути парашютиста из его текущего положения при неизменных параметрах полета (т.е. при отсутствии управляющих воздействий на парашютную систему). Одновременно рядом с отметкой 9.11 отображается текущее значение путевой скорости в цифровой форме.
Острие указателя подвижного символа 9.12 на шкале 9.1 находится напротив значения фактического истинного курса полета парашютиста при неизменных параметрах полета (т.е. при отсутствии управляющих воздействий на парашютную систему). Одновременно рядом с символом 9.12 значение фактического истинного курса отображается в цифровой форме. При нахождении текущего значения истинного курса вне видимого участка шкалы 9.1 символ 9.12 не отображается.
К символам обеспечения приземления в целевой точке относятся подвижная метка истинного курса на точку приземления 9.13, отметка линии заданного пути на точку приземления 9.14 и отметка целевой точки приземления 9.15.
Острие указателя подвижного символа 9.13 на шкале 9.1 находится напротив значения истинного курса полета парашютиста, требуемого для достижения целевой точки приземления из текущего положения парашютиста при прямолинейной линии пути (т.е. при кратчайшем маршруте управляемого спуска). В этом случае для парашютиста задача выхода к целевой точке приземления по кратчайшему маршруту заключается в выборе таких управляющих воздействий на парашютную систему, чтобы добиваться непрерывного совмещения символов 9.12 и 9.13. Таким образом осуществляется директорное управление курсом полета парашютной системы, в котором 9.13 используется в качестве директорной метки, а 9.12 - в качестве метки положения. Одновременно рядом с символом 9.13 требуемое значение истинного курса отображается в цифровой форме. При нахождении текущего значения истинного курса на целевую точку приземления вне видимого участка шкалы 9.1 символ 9.13 не отображается.
Отметка 9.14 отображает на видимом изображении подстилающей местности попадающий в поле зрения нашлемной системы участок линии заданного пути парашютиста на целевую точку приземления из его текущего положения при кратчайшем маршруте управляемого спуска. Рядом с отметкой 9.14 в цифровой форме отображаются путевая (числитель) и наклонная (знаменатель) дальности до точки приземления. При совмещении указателей 9.12 и 9.13 отметки 9.11 и 9.14 также оказываются совмещенными, что используется в качестве дополнительного средства для реализации директорного управления.
Отметка 9.15 индицируется на видимом изображении подстилающей местности в расчетном местоположении целевой точки приземления (при ее попадании в поле зрения нашлемной системы отображения).
В режиме обеспечения приземления в оперативно выбранной точке отметки 9.13, 9.14 и 9.15 не отображаются. В этом случае задача выхода к выбранной точке приземления по кратчайшему маршруту заключается в выборе таких управляющих воздействий на парашютную систему, чтобы добиваться непрерывного наложения отметки линии пути 9.11 на видимое изображение выбранной точки приземления.
В состав символов отображения зон досягаемости входят подвижный указатель превышения парашютиста над границей зоны досягаемости целевой точки приземления 9.16, отметка горизонтальной границы зоны досягаемости целевой точки приземления 9.17 и отметка горизонтальной границы зоны досягаемости видимых объектов подстилающей местности 9.18 При этом отметки 9.16 и 9.17 используются в режиме обеспечения приземления в целевой точке подстилающей местности. В режиме обеспечения приземления в оперативно выбранной точке вместо них отображается отметка 9.18.
Острие указателя подвижного символа 9.16 на шкале 9.3 находится напротив значения высоты над поверхностью земного эллипсоида расчетной точки пересечения местной вертикали, проходящей через центр масс парашютиста, с границей конуса возможностей купола для целевой точки приземления. Одновременно рядом с символом 9.16 высота границы конуса возможностей купола отображается в цифровой форме. При нахождении текущего значения высоты границы конуса возможностей вне видимого участка шкалы 9.3 символ 9.16 не отображается.
Если на шкале 9.3 символ 9.16 находится ниже символа 9.9, то парашютист находится в пределах зоны досягаемости целевой точки приземления и у него имеется запас высоты для совершения произвольных маневров. При нахождении символов 9.9 и 9.16 на одном уровне так, что острия их указателей направлены на одну и ту же точку шкалы 9.3, парашютист находится на границе зоны досягаемости целевой точки приземления. В этом случае запас высоты отсутствует и для достижения целевой точки приземления парашютист должен двигаться строго по прямой путем совмещения меток 9.12 и 9.13. Если на шкале 9.3 символ 9.16 начинает превышать символ 9.9, то парашютист выходит за пределы зоны досягаемости целевой точки приземления.
Отметка 9.17 индицируется на видимом изображении подстилающей местности и представляет собой попадающий в поле зрения нашлемной системы участок проекции на подстилающую местность сечения поверхности конуса возможностей купола плоскостью местного горизонта, проходящей через центр масс парашютиста. Если отметка линии фактического пути 9.11 пересекает линию границы зоны досягаемости 9.17 на дальности, превышающей видимую дальность отметки 9.15, то парашютист находится в пределах зоны досягаемости целевой точки приземления. В противном случае он находится вне зоны досягаемости.
Приоритетное использование отметки 9.16 предпочтительно для управляемых парашютных систем с высоким аэродинамическим качеством купола, а отметки 9.17 - для систем с низким аэродинамическим качеством купола.
Отметка 9.18 индицируется на видимом изображении подстилающей местности и представляет собой попадающий в поле зрения нашлемной системы участок сечения конической поверхности с вершиной в центре масс парашютиста плоскостью местного горизонта, касательной к поверхности земного эллипсоида в точке ее пересечения с местной вертикалью парашютиста. Если выбранная точка подстилающей местности при ее нахождении на линии фактического пути 9.11 наблюдается на дальности, меньшей наблюдаемой дальности до точки пересечения линий 9.11 и 9.18, то она находится в пределах зоны досягаемости.
Символы 9.19 используются для отображения расчетного положения в пространстве попадающих в поле зрения нашлемной системы взаимодействующих парашютистов (на Фиг. 6а один парашютист). Размеры символов 9.19 могут задаваться постоянными при прямой оптической видимости взаимодействующих парашютистов или изменяющимися пропорционально расчетной дальности до них при отсутствии прямой видимости (ночью и в сложных метеоусловиях). Одновременно рядом с символом 9.19 в цифровой форме отображается порядковый номер взаимодействующего парашютиста (в данном примере №3), соответствующий его абонентскому номеру в радиосети.
В качестве средств индикации предупреждения о столкновении используется мерцание символов 9.9, 9.10, 9.19, 9.7 и 9.8, сопровождающееся одновременным звуковым оповещением. При опасности столкновения с подстилающей поверхностью должны мерцать символы 9.9 и 9.10. При опасности столкновения с взаимодействующим парашютистом в случае его нахождения в поле зрения нашлемной системы мерцает отметка 9.19, соответствующая указанному парашютисту. Символы 9.7 и 9.8 мерцают в случае нахождения источника угрозы столкновения вне поля зрения нашлемной системы, показывая направление кратчайшего поворота нашлемной системы путем разворота парашютиста и/или поворота его головы для ввода источника угрозы в рабочее поле зрения.
При наклоне головы парашютиста непосредственно вниз (т.е. при визировании подстилающей местности в направлении, близком к местной вертикали) все вышеуказанные символы и отметки отображаются в нашлемном средстве в плановой форме, Фиг. 6б, где 9.20 - символ собственной парашютной системы (второй взаимодействующий парашютист 9.19 с порядковым номером №7).
Кратко рассмотрим работу заявляемой информационной системы с учетом того, что состав, функции и алгоритмы работы основных модулей рассмотрены выше.
Перед началом работы производят загрузку исходных данных: электронной карты, координат целевой точки приземления, параметров парашютной системы и парашютиста, условий полета, состава группы и порядковых (абонентских) номеров взаимодействующих парашютистов и т.п.
Модули информационной системы размещают в транспортном модульном жилете парашютиста, а после инициализации информационная система готова к работе.
В ходе спуска парашютист получает через нашлемное средство дополненной реальности от информационной системы визуальные и звуковые сигналы тревоги, виртуальные изображения участка электронной карты местности, зон досягаемости точки приземления, положения взаимодействующих парашютистов, ориентиров и информационно-управляющих символов и отметок, обеспечивающих управление парашютной системой. Кроме того, при хорошей видимости парашютист наблюдает реальное изображение подстилающей местности.
После приземления работа информационной системы продолжается, обеспечивая парашютиста связью и навигационной информацией при наземных действиях. Удобное размещение информационной системы не препятствует действиям парашютиста на земле.
Таким образом, заявляемая информационная система может быть реализована и позволяет повысить безопасность полета, точность приземления и удобство использования.
Источники информации:
1. Патент RU 2316812.
2. https://lastday.club/future-force-warrior/.
3. Патент RU 120790 U1.
4. Патент AU 2010248083.
5. Патент US 20070233382.
6. Патент RU 2288622.
7. Патент RU 101897 U1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗОНЫ ДОСЯГАЕМОСТИ ПАРАШЮТИСТОМ ЦЕЛЕВОЙ ТОЧКИ ПРИЗЕМЛЕНИЯ | 2019 |
|
RU2705928C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| Тренажер для наземной подготовки парашютиста | 2023 |
|
RU2806470C1 |
| ПАРАШЮТНЫЙ ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ К ПРЫЖКАМ НА ВОДУ | 2017 |
|
RU2655230C1 |
| СПОСОБ ДОСТАВКИ ПОДВЕСНОЙ ПАРАШЮТНОЙ СИСТЕМЫ В ТОЧКУ ПОСАДКИ | 2019 |
|
RU2732474C1 |
| Способ подготовки парашютистов и устройство его реализующее | 2019 |
|
RU2730759C1 |
| Информационная обзорно-панорамная система наблюдения | 2020 |
|
RU2757061C1 |
| Способ подготовки летного состава к аварийному покиданию летательного аппарата и устройство его реализующее | 2024 |
|
RU2832486C1 |
| Способ подготовки парашютистов на тренажере воздушно-десантной подготовки и устройство его реализующее | 2021 |
|
RU2769481C1 |
| СИСТЕМА ПОРТАТИВНЫХ КОМПЛЕКТОВ ДЛЯ АВТОМАТИЗИРОВАННОГО ЦЕЛЕУКАЗАНИЯ НА ПОЛЕ БОЯ | 2019 |
|
RU2717138C1 |
Изобретение относится к носимым информационным системам участников воздушно-десантных операций и может использоваться как при спуске на парашюте, так и в последующих действиях в наземных условиях. Технический результат – расширение функциональных возможностей на основе улучшения приспособленности информационной системы к решению задач по целевому назначению парашютиста. Для этого использовано нашлемное средство дополненной реальности, совмещающее видимое парашютистом реальное изображение подстилающей местности с изображениями трехмерных электронной карты, зоны досягаемости целевой точки приземления и положения взаимодействующих парашютистов, а также исполнение элементов информационной системы в виде отдельных модулей, встроенных в транспортный модульный жилет парашютиста. Информационная система позволяет повысить безопасность полета, точность приземления и удобство использования как в полете, так и в наземных действиях. 6 ил.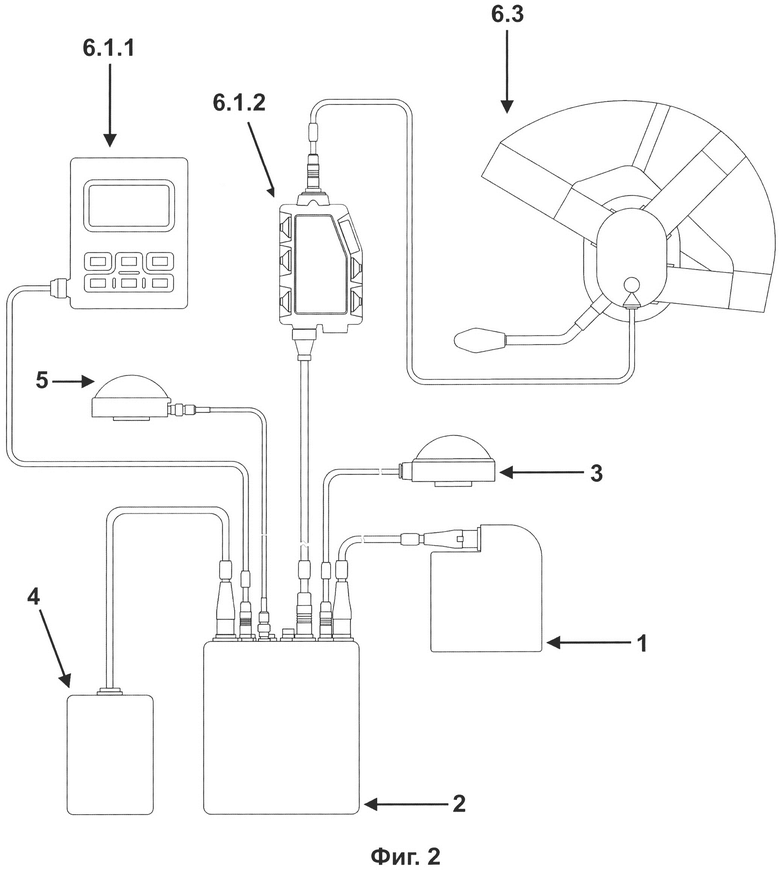
Модульная информационная система парашютиста, содержащая соединенные подсистему электропитания и вычислительную подсистему, связанную через соответствующие интерфейсы с подсистемой радиосвязи, подсистемой инерциально-магнитной навигации, подсистемой спутниковой навигации, подсистемой интерактивной связи информационной системы с парашютистом в составе средств ввода информации, визуального отображения и звукового оповещения, при этом вычислительная подсистема содержит программные модули отображения на электронной карте местности целевой точки приземления и выработки сигнала тревоги, предупреждающего о возможности столкновения с взаимодействующими парашютистами, отличающаяся использованием в качестве средства визуального отображения нашлемного средства дополненной реальности, совмещающего видимое парашютистом реальное изображение подстилающей местности с формируемыми программными модулями вычислительной подсистемы изображениями трехмерных электронной карты, зоны досягаемости целевой точки приземления и положения взаимодействующих парашютистов, программный модуль выработки сигнала тревоги дополнен функцией предупреждения о столкновении с подстилающей поверхностью, при этом подсистема электропитания, вычислительная подсистема, подсистемы радиосвязи, инерциально-магнитной и спутниковой навигации, а также средства ввода информации в составе многофункционального и оперативного пультов управления выполнены в виде отдельных модулей, встроенных в транспортный модульный жилет парашютиста, причем модули радиосвязи и спутниковой навигации размещены в наплечных фиксаторах жилета, модули многофункционального и оперативного пультов управления размещены в подсумках на грудной секции жилета, а модули электропитания, вычислительный и инерциально-магнитной навигации - в подсумках на поясной части жилета.
| US 7302340 В2, 27.11.2007 | |||
| ПЕРЕНОСНОЕ АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО | 2006 |
|
RU2316812C1 |
| Способ приготовления хлеба из нехлебопекарной муки, например рисовой, кукурузной и зерно-бобовой, а также из крахмала без растительного белка | 1959 |
|
SU120790A1 |
| ТРАНСПОРТНО-БОЕВАЯ МОДУЛЬНАЯ СИСТЕМА | 2005 |
|
RU2288622C2 |
| СИСТЕМА МОНИТОРИНГА, ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ И ОХРАНЫ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОБЪЕКТОВ ОТ НЕСАНКЦИОНИРОВАННОГО ВОЗДЕЙСТВИЯ | 2001 |
|
RU2174923C1 |
| Способ многоканальной регистрации результатов измерений и устройство для его осуществления | 1990 |
|
SU1747905A1 |

