ОБЛАСТЬ ТЕХНИКИ
[0001] Данное изобретение, в общем относится к области измерительной техники, а в частности к способам и системам измерения расстояния до удаленных объектов, и может быть использовано для определения расстояния до удаленного объекта при наблюдении с камеры, расположенной на заданной высоте.
УРОВЕНЬ ТЕХНИКИ
[0002] В настоящее время в уровне техники известны решения, измеряющие расстояния до удаленных объектов, но все они, как правило, используют дальномерно-угломерные приборы (ПДУ).
[0003] Из уровня техники известен способ позиционирования удаленных объектов с помощью ПДУ, при котором имеется как минимум три дальномерных узла, пространственно расположенных на некотором удалении друг от друга и от объекта, но в пределах прямой видимости объекта. Дальномерные узлы, в том числе дальномерный узел наводчика, наводят свои ПДУ на объект и определяют расстояния до объекта. Затем величины измеренного расстояния передают на дальномерный узел наводчика, который на основании измерений расстояний и по значениям своего угла магнитного склонения и широты определяет координаты объекта [1].
[0004] Этот способ обеспечивает высокую точность позиционирования удаленного объекта за счет более высокой точности измерения линейных расстояний по сравнению с измерением угловых координат, однако он имеет недостатки, обусловленные тем, что требуется точное знание угла магнитного склонения и возможны грубые ошибки из-за отсутствия критерия попадания луча ПДУ на объект.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Данное техническое решение направлено на устранение недостатков, присущих существующим решениям.
[0006] Технической проблемой в данном техническом решении является определение расстояния до удаленных объектов при наблюдении из точки, расположенной на определенной высоте.
[0007] Техническим результатом данного решения является повышение точности определения расстояния до удаленных объектов.
[0008] Указанный технический результат достигается благодаря способу измерения расстояния до удаленных объектов, в котором определяют, по меньшей мере, одну точку удаленного объекта и, по меньшей мере, одну точку горизонта с заданной высоты наблюдения; получают данные об азимуте наблюдения удаленного объекта, азимуте наблюдения, по меньшей мере, одной точки горизонта и данные о рельефе местности по азимуту наблюдения по меньшей мере одной точки удаленного объекта и азимуту наблюдения, по меньшей мере, одной точки горизонта; определяют, по меньшей мере, одну разницу углов места между, по меньшей мере, одной точкой удаленного объекта и, по меньшей мере, одной точки горизонта; определяют угол места наблюдения, по меньшей мере, одной точки горизонта на основании данных об азимуте наблюдения, по меньшей мере, одной точки горизонта, рельефе местности и заданной высоты наблюдения; определяют угол места наблюдения удаленного объекта на основе данных об угле места наблюдения, по меньшей мере, одной точки горизонта и разницы углов места между, по меньшей мере, одной точкой удаленного объекта и, по меньшей мере, одной точкой горизонта, определенных ранее; определяют расстояние до удаленного объекта на основании данных об угле места наблюдения удаленного объекта, рельефе местности, азимуте наблюдения удаленного объекта и заданной высоте наблюдения.
[0009] В некоторых вариантах осуществления настоящего технического решения данные о рельефе местности представляют собой карту высот местности.
[00010] В некоторых вариантах осуществления настоящего технического решения для определения азимута объекта и горизонта и разницы углов места между точкой удаленного объекта и точкой горизонта используют видеокамеру, имеющую внутреннюю и внешнюю калибровку.
[00011] В некоторых вариантах осуществления настоящего технического решения для определения азимута объекта и горизонта и разницы углов места между точкой удаленного объекта и точкой горизонта используют управляемую PTZ камеру, имеющую внутреннюю и внешнюю калибровку, которую направляют на удаленный объект.
[00012] В некоторых вариантах осуществления настоящего технического решения, при использовании камеры объект и точка горизонта находятся на одном изображении.
[00013] В некоторых вариантах осуществления настоящего технического решения, при определении угла места точки горизонта, и определения расстояния до объекта учитывают рефракцию оптических лучей в атмосфере.
[00014] В некоторых вариантах осуществления настоящего технического решения, при получении азимута наблюдения удаленного объекта используют математическую модель камеры-обскуры.
[00015] В некоторых вариантах осуществления настоящего технического решения, при определении угла места наблюдения удаленного объекта используют формулу Винченци.
[00016] Также указанный технический результат достигается благодаря системе измерения расстояния до удаленных объектов, содержащей видеокамеру, выполненную с возможностью получения, по меньшей мере, одного кадра, содержащего, по меньшей мере, один удаленный объект и горизонт; процессор; память для хранения инструкций, выполняемых посредством процессора, причем процессор выполнен с возможностью: определения, по меньшей мере, одной точки удаленного объекта и, по меньшей мере, одной точки горизонта с заданной высоты наблюдения; получения данных об азимуте наблюдения удаленного объекта, азимуте наблюдения, по меньшей мере, одной точки горизонта и данных о рельефе местности по азимуту наблюдения объекта и азимуту наблюдения, по меньшей мере, одной точки горизонта; определения, по меньшей мере, одной разницы углов места между, по меньшей мере, одной точкой удаленного объекта и, по меньшей мере, одной точки горизонта; определения угла места наблюдения, по меньшей мере, одной точки горизонта на основании данных об азимуте наблюдения, по меньшей мере, одной точки горизонта, рельефе местности и заданной высоты наблюдения; определения угла места наблюдения удаленного объекта на основе данных об угле места наблюдения по меньшей точки горизонта и разницы углов места между, по меньшей мере, одной точкой удаленного объекта и, по меньшей мере, одной точкой горизонта, определенных ранее; определения расстояния до удаленного объекта на основании данных об угле места наблюдения удаленного объекта, рельефе местности, азимуте наблюдения удаленного объекта и заданной высоте наблюдения.
[00017] В некоторых вариантах осуществления настоящего технического решения, видеокамера является позиционируемой дистанционно управляемой PTZ - камерой.
[00018] В некоторых вариантах осуществления настоящего технического решения, процессор является центральным или графическим.
[00019] В некоторых вариантах осуществления настоящего технического решения, память является энергозависимым запоминающим устройством или энергонезависимым запоминающим устройством.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00020] Признаки и преимущества настоящего изобретения станут очевидными из приводимого ниже подробного описания изобретения и прилагаемых чертежей, на которых:
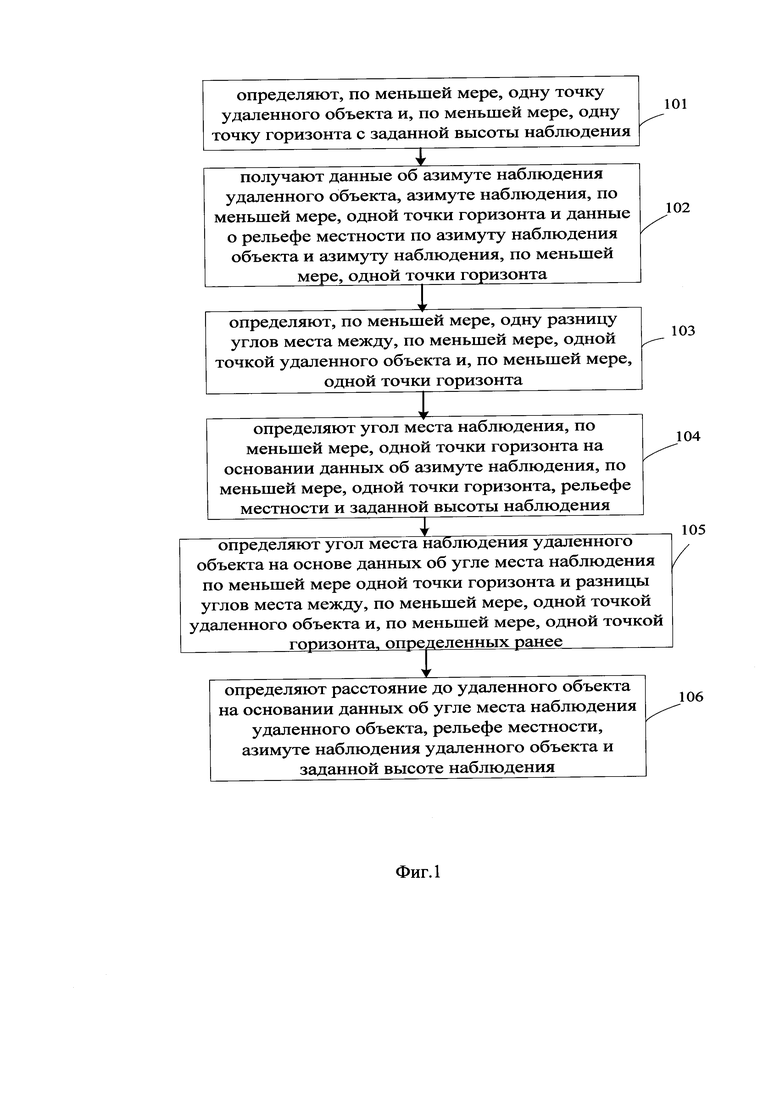
[00021] На Фиг. 1 показан пример осуществления варианта технического решения согласно способу измерения расстояния до удаленных объектов;
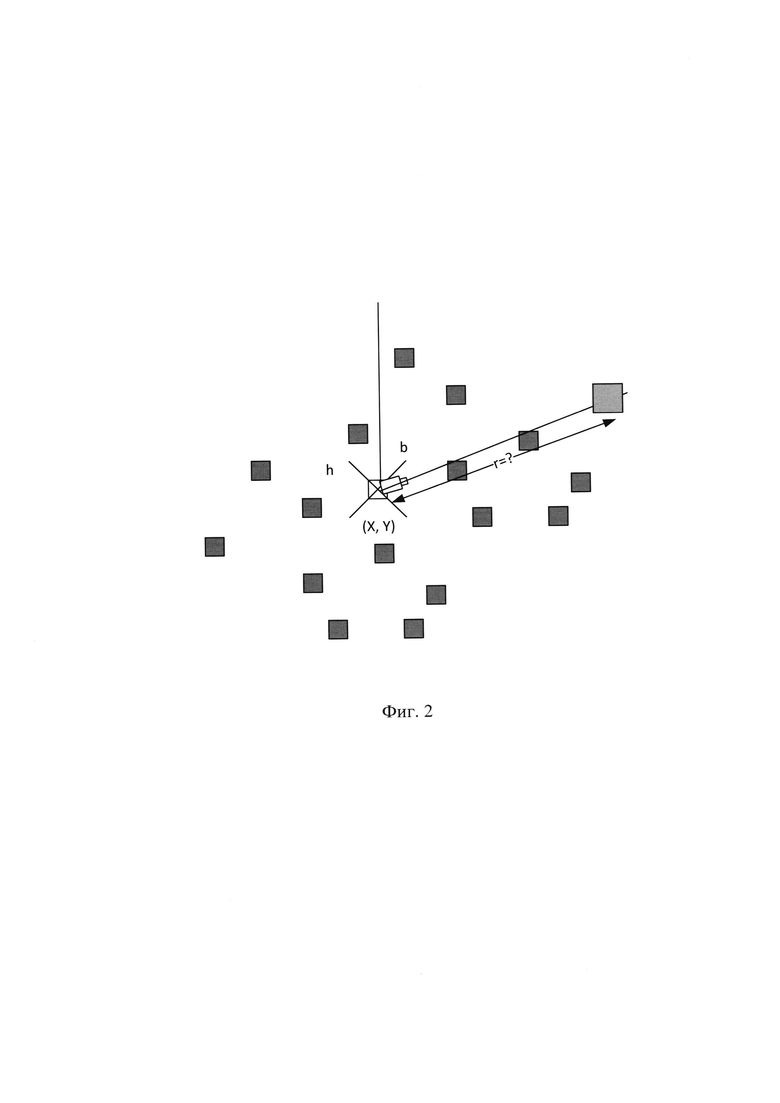
[00022] На Фиг. 2 показан пример осуществления варианта технического решения, в котором расстояние необходимо определить от камеры, расположенной на заданной высоте (вид сверху);
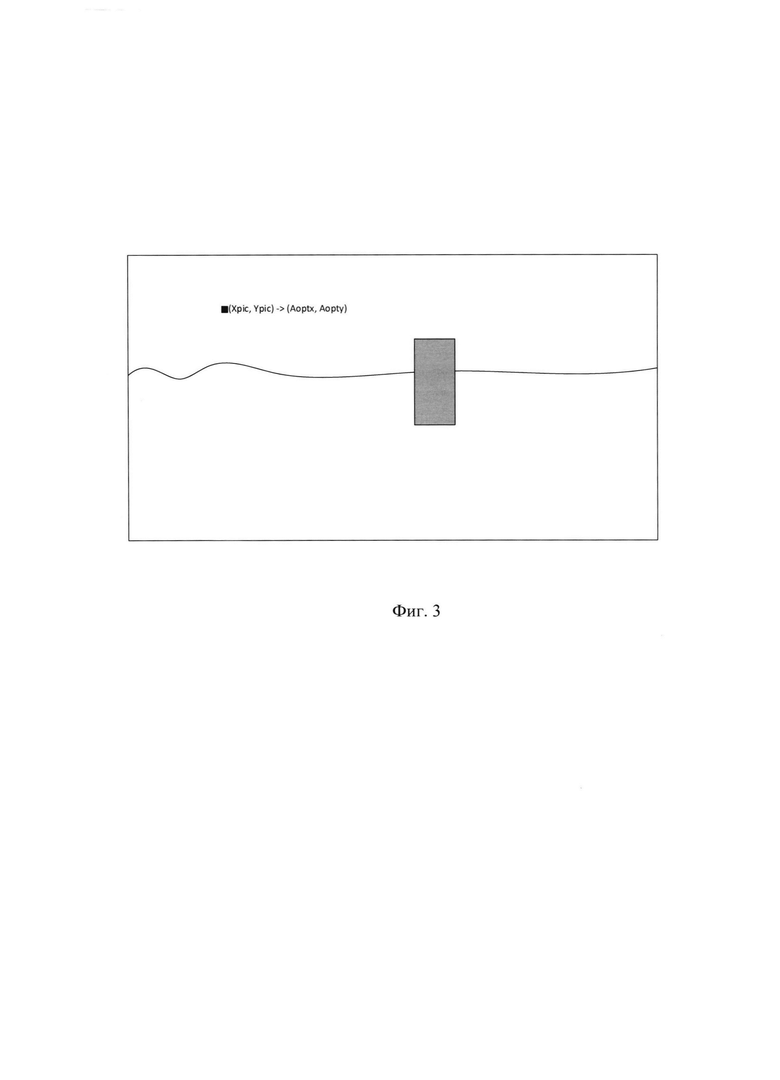
[00023] На Фиг. 3 показан примерный кадр, получаемый с камеры, при наблюдении удаленного объекта, расстояние до которого необходимо определить;
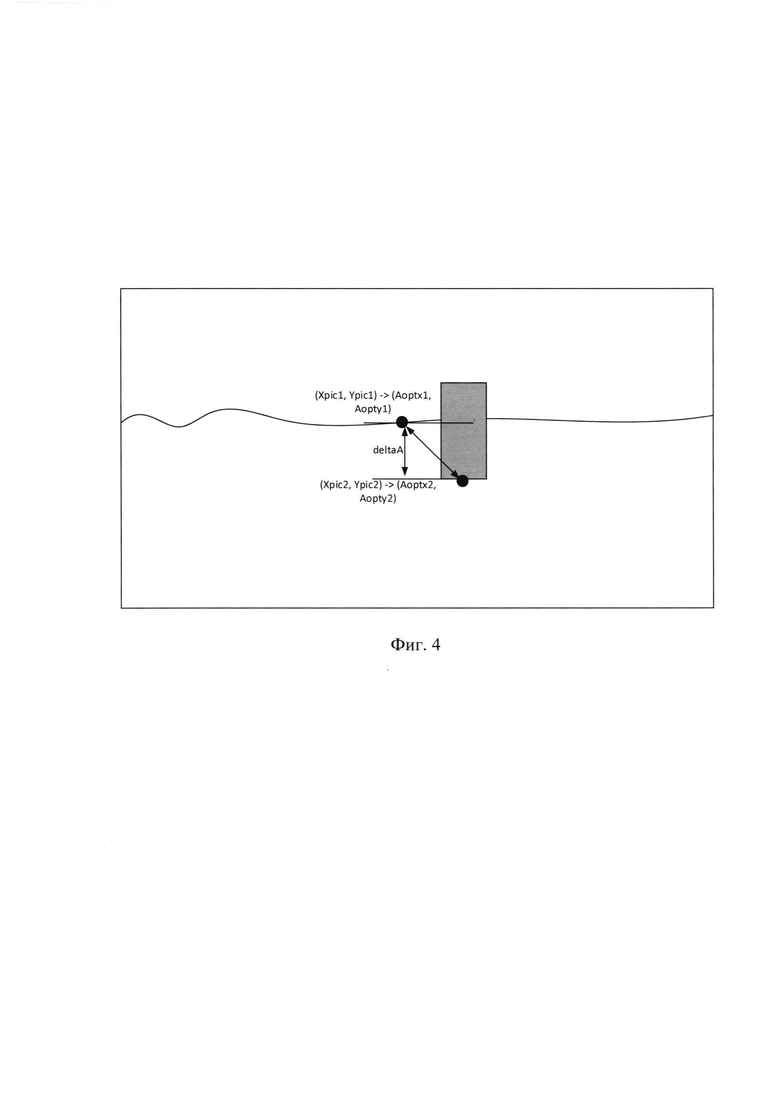
[00024] На Фиг. 4 показан примерный вариант определения разницы углов места между точкой удаленного объекта и точкой горизонта;
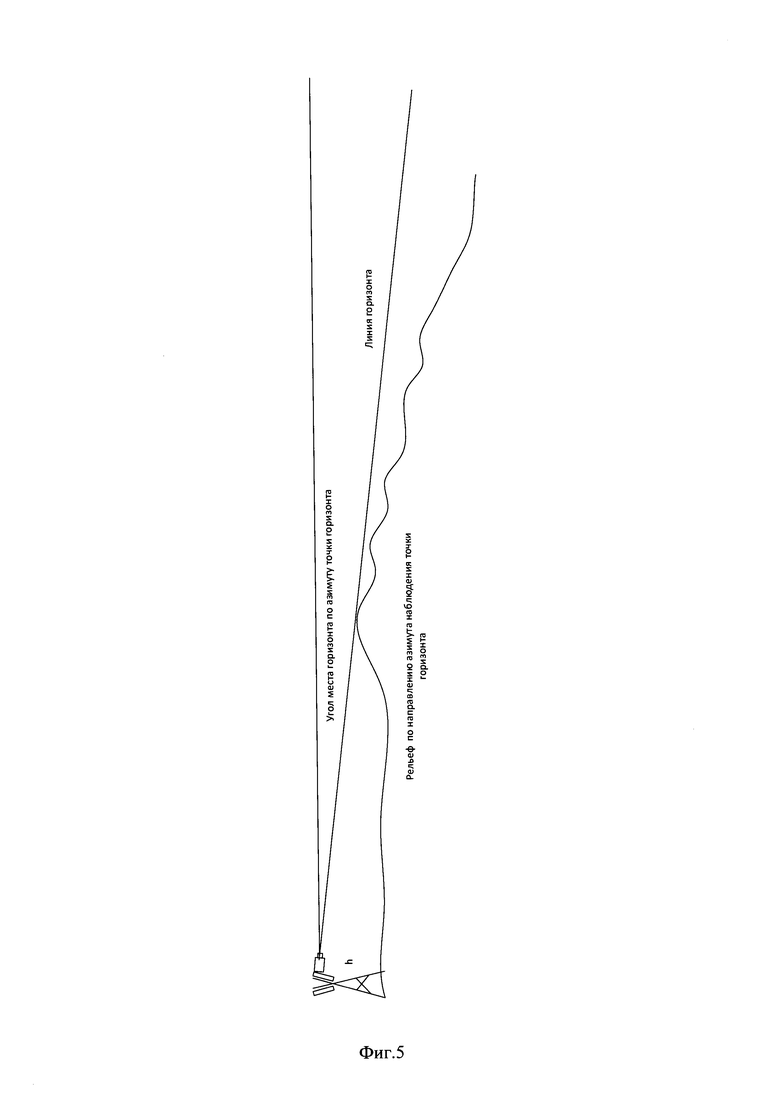
[00025] На Фиг. 5 показано пояснение для линии горизонта по конкретному азимуту;
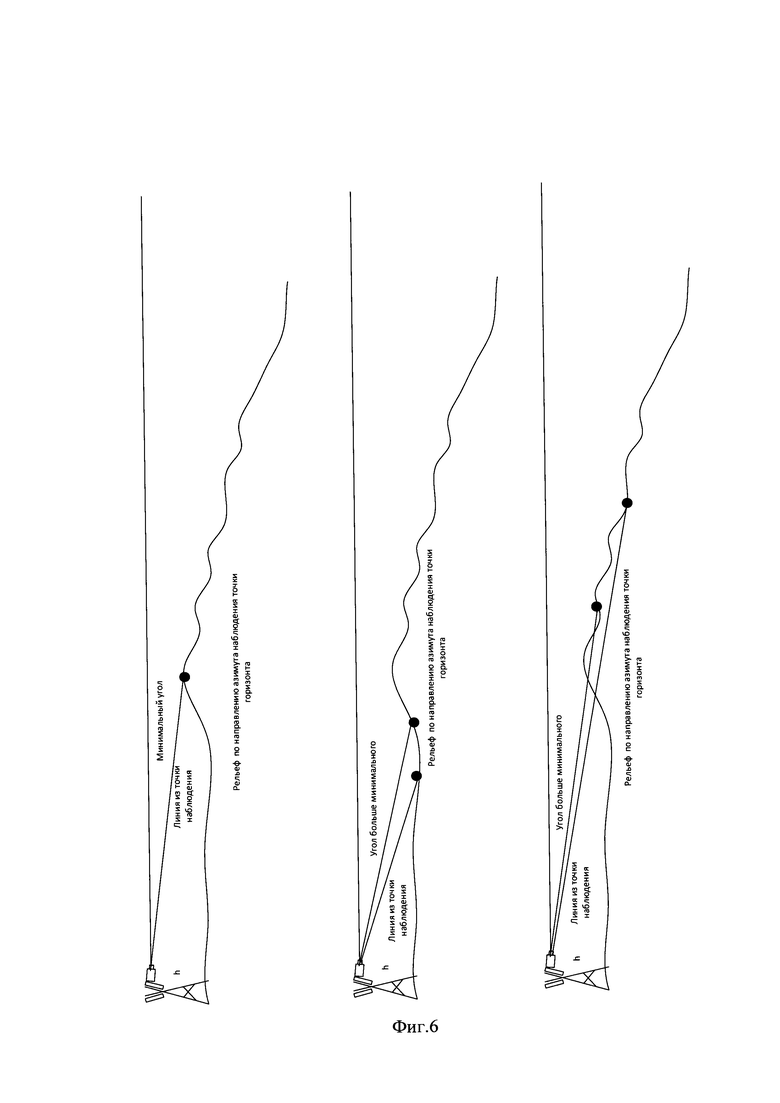
[00026] На Фиг. 6 показан пример осуществления определения угла места наблюдения, по меньшей мере, одной точки горизонта на основании данных об азимуте наблюдения, по меньшей мере, одной точки горизонта, рельефе местности и заданной высоты наблюдения;
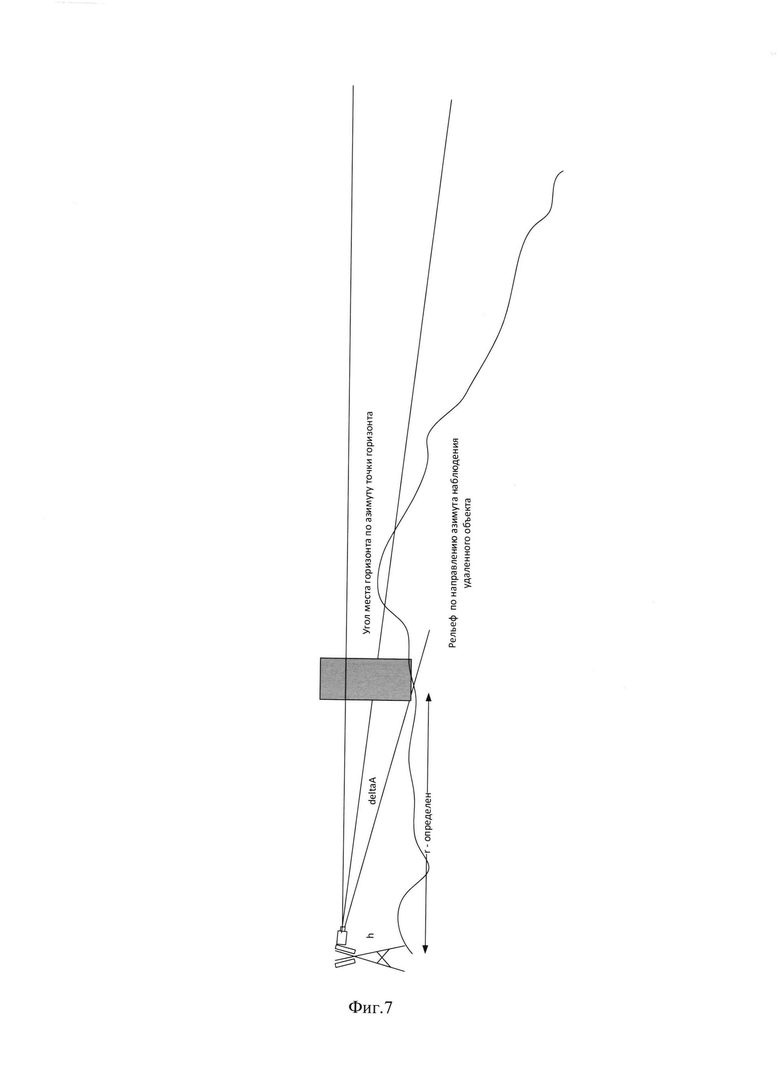
[00027] На Фиг. 7 показан пример осуществления определения угла места удаленного объекта на основе данных об угле места наблюдения по меньшей точки горизонта и разнице углов места наблюдения горизонта и удаленного объекта;
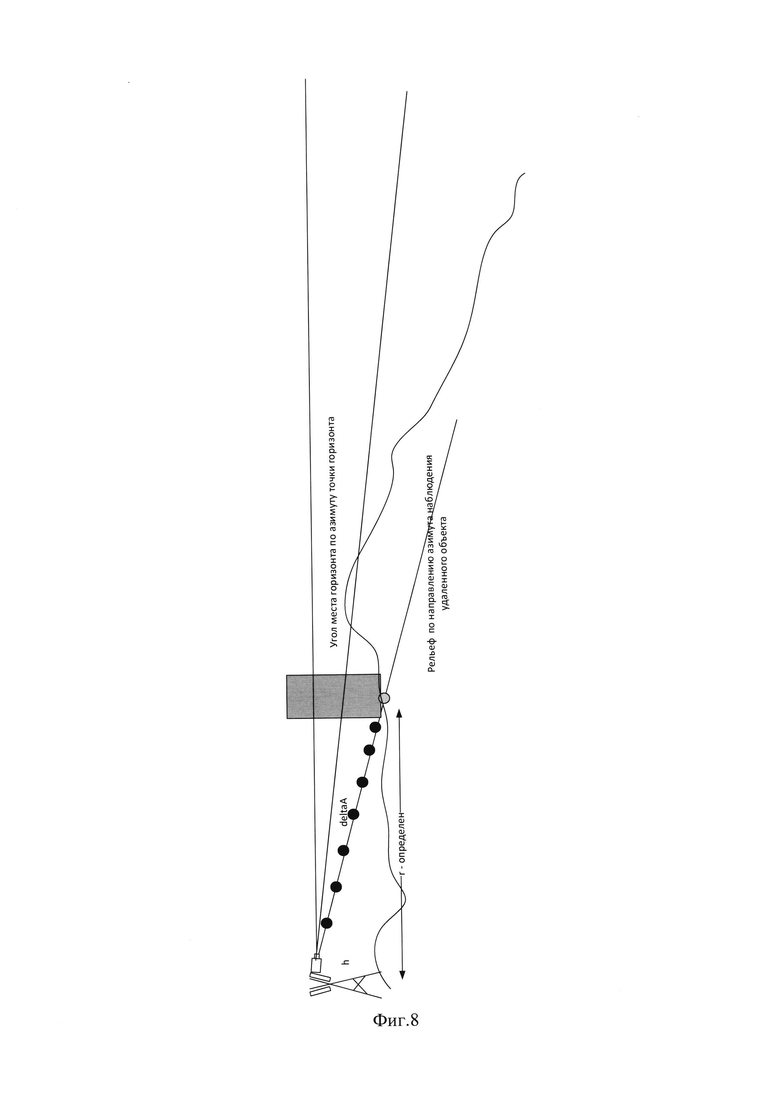
[00028] На Фиг. 8 показан пример осуществления определения расстояния до объекта при известном угле места наблюдения удаленного объекта;
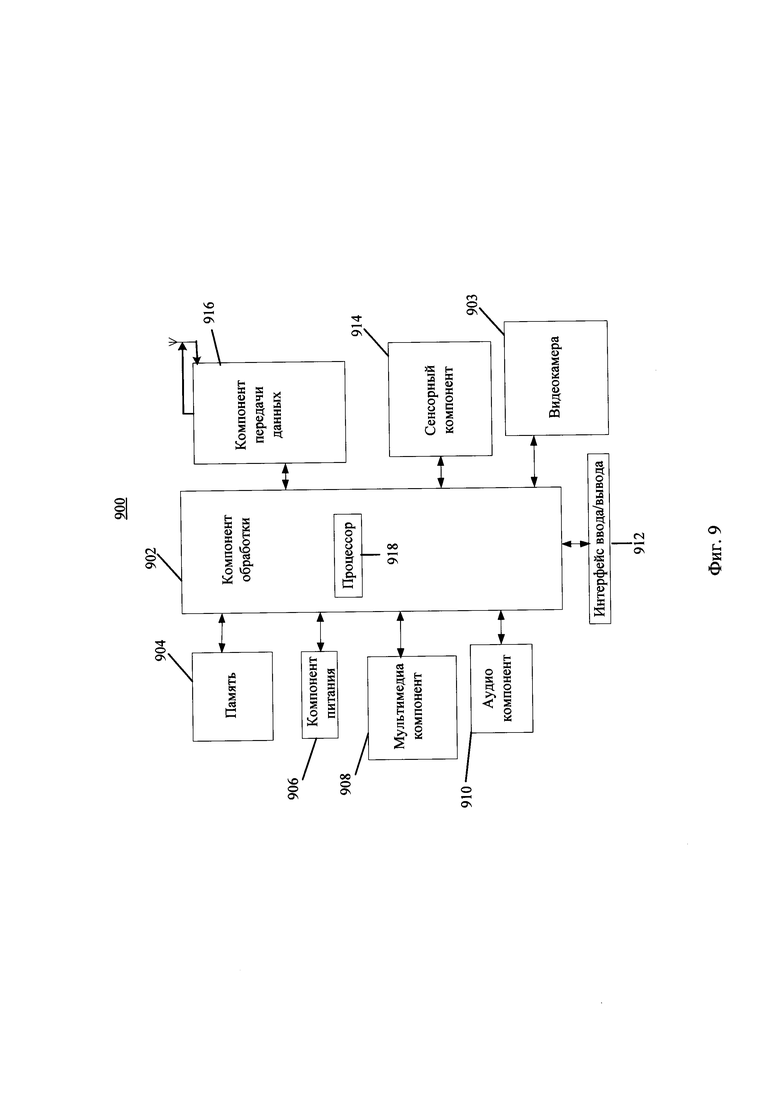
[00029] На Фиг. 9 показан пример осуществления варианта технического решения согласно системе измерения расстояния до удаленных объектов.
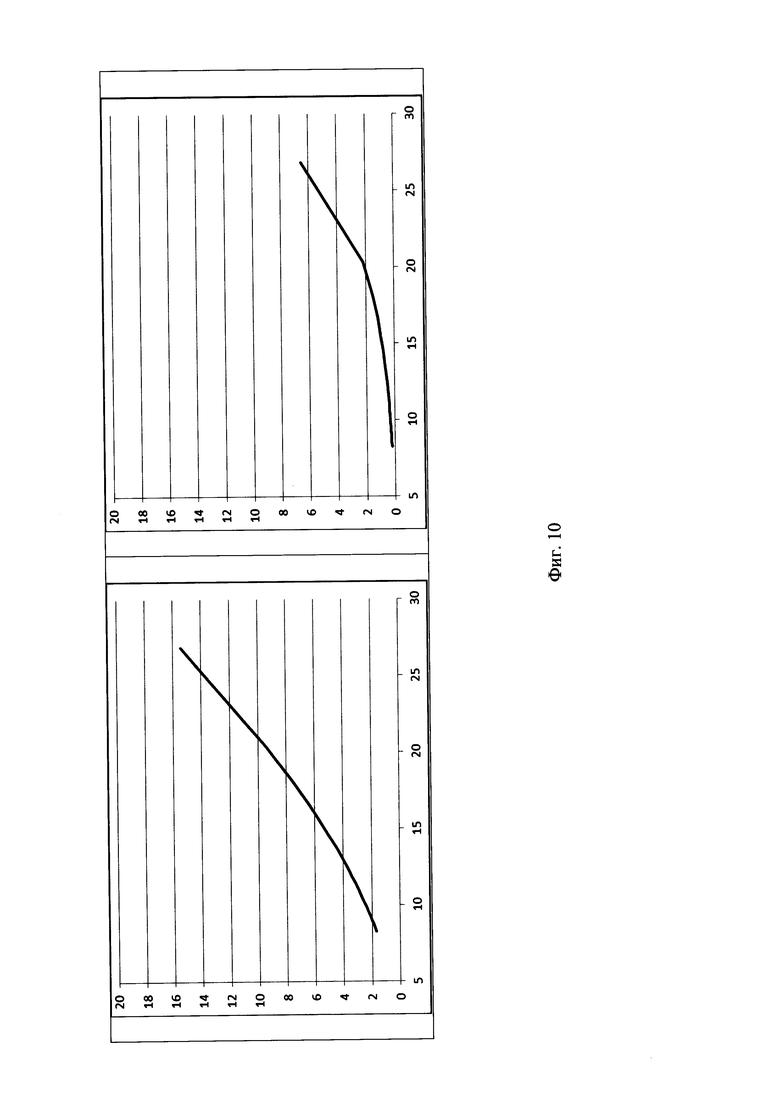
[00030] На Фиг. 10 показано достижение технического результата.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[00031] Данное техническое решение может быть реализовано на компьютере, в виде системы или машиночитаемого носителя, содержащего инструкции для выполнения вышеупомянутого способа.
[00032] Техническое решение может быть реализовано в виде распределенной компьютерной системы.
[00033] В данном решении под системой подразумевается компьютерная система, ЭВМ (электронно-вычислительная машина), ЧПУ (числовое программное управление), ПЛК (программируемый логический контроллер), компьютеризированные системы управления и любые другие устройства, способные выполнять заданную, четко определенную последовательность операций (действий, инструкций).
[00034] Под устройством обработки команд подразумевается электронный блок либо интегральная схема (микропроцессор), исполняющая машинные инструкции (программы).
[00035] Устройство обработки команд считывает и выполняет машинные инструкции (программы) с одного или более устройства хранения данных. В роли устройства хранения данных могут выступать, но, не ограничиваясь, жесткие диски (HDD), флеш-память, ПЗУ (постоянное запоминающее устройство), твердотельные накопители (SSD), оптические приводы.
[00036] Программа - последовательность инструкций, предназначенных для исполнения устройством управления вычислительной машины или устройством обработки команд.
[00037] Ниже будут описаны термины и понятия, необходимые для осуществления настоящего технического решения.
[00038] Удаленный объект - объект, находящийся на достаточно большом удалении от точки наблюдения.
[00039] Угол места (элевация) - угловая высота наблюдаемого объекта (земного предмета, летательного аппарата, небесного светила и др.) над истинным горизонтом. Угол места совместно с азимутом служат для определения направления на наблюдаемый объект. Наблюдение выше истинного горизонта имеют положительный угол места, ниже отрицательный угол места.
[00040] Кадр-данные получаемые с матрицы, набор точек (пикселей) каждой их которых присвоена характеристика (яркость) или несколько характеристик (яркость, цветовые компоненты)
[00041] Пиксель - наименьший логический элемент двумерного цифрового изображения в растровой графике, или элемент матрицы дисплеев, формирующих изображение, или элемент матрицы камеры, создающей изображение.
[00042] Калибровка камеры - это задача получения внутренних и внешних параметров камеры по имеющимся фотографиям или видео, отснятыми ею. Калибровка камеры часто используется на начальном этапе решения многих задач компьютерного зрения и в особенности дополненной реальности.
[00043] Калиброванная камера - это математическая модель, полученная в результате калибровки (описанная с помощью формул или таблиц), связывающая точки изображения (пиксель) и направление прихода оптического луча, отображаемое этим пикселем, позволяющая сопоставить объекты на изображении и их прообразы в трехмерном пространстве.
[00044] Азимут - угол между направлением на север и направлением на какой-либо заданный объект, или текущим направлением анализа.
[00045] Азимут наблюдения удаленного объекта - азимут, под которым наблюдается конкретный удаленный объект, если удаленные объект имеют большие угловые размеры по азимуту, то азимутом удаленного объекта можно считать азимут наблюдаемого центра объекта. Другими словами, это азимут, под которым приходят оптические лучи от удаленного объекта.
[00046] Азимут наблюдения точки горизонта - азимут, по которому наблюдается конкретная точка горизонта. Другими словами, это азимут, под которым приходят оптические лучи от конкретной точки горизонта.
[00047] Угол места наблюдения удаленного объекта - угол места, под которым наблюдается удаленный объект. Причем, если объект имеет большие угловые размеры по углу места, для данного изобретения углом места объекта будет считаться угол места нижней точки объекта.
[00048] Угол места наблюдения точки горизонта - угол места конкретной точки горизонта с конкретным азимутом.
[00049] Высота наблюдения - высота над поверхностью земли, точки с известным местоположением, с которой производят наблюдение и/или определение расстояний до объекта.
[00050] Линия прямой видимости - путь прямого (незагоризонтного) распространения радиоволн (в том числе оптического диапазона) без учета их рефракции и влияния Земли.
[00051] Фиг. 1 представляет собой блок-схему, показывающую способ измерения расстояния до удаленных объектов, который содержит следующие шаги:
[00052] Шаг 101: определяют, по меньшей мере, одну точку удаленного объекта и, по меньшей мере, одну точку горизонта с заданной высоты наблюдения.
[00053] В некоторых вариантах осуществления одна точка удаленного объекта и, по меньшей мере, одна точка горизонта определяется по кадру или по последовательности кадров, полученных с камеры, расположенной по известным координатам, на определенной, известной, высоте над землей. С камеры наблюдается некоторый удаленный объект под известным азимутом (Фиг. 2). У камеры известна внутренняя калибровка, т.е. связь угла прихода оптического луча относительно оптической оси и плоскости матрицы. В некоторых вариантах осуществления, такая связь может быть выражена через калибровочные характеристики, например, информацию об угле обзора камеры по вертикали и горизонтали и разрешение матрицы по вертикали и горизонтали.
[00054] На Фиг. 3 показан примерный кадр, который получают с камеры при наблюдении удаленного объекта, расстояние до которого необходимо определить.
[00055] Удаленный объект (например, нижняя точка объекта, центральная) и, по меньшей мере, одна точка горизонта могут быть заданы пользователем с помощью пользовательского интерфейса (в одном из вариантов эти точки могут находиться на одном азимуте, но это не отменяет общности, при которой эти точки могут находиться по различным азимутам). В некоторых вариантах осуществления, определяют удаленный объект и, по меньшей мере, одну точку горизонта с заданной высоты наблюдения автоматически с использование системы компьютерного зрения (когда система компьютерного зрения автоматически находит точки горизонта и объект, расстояние до которого необходимо измерить).
[00056] В случае использования системы компьютерного зрения, поиск горизонта может быть осуществлен с использованием алгоритма поиска горизонтальных линий, описанного в источнике [2], а поиск интересующего удаленного объекта может быть реализован с помощью алгоритмов выделения различных объектов с использованием модели объекта, описанных в источнике [2]. Для определения границ контрастных объектов может использоваться один из следующих методов, не ограничиваясь: комбинаторный метод или метод порогового градиента, метод выделения контура путем применения оператора Лапласа и фильтра Гаусса, метод, использующий оператор Собеля.
[00057] Шаг 102: получают данные об азимуте наблюдения по меньшей мере одной точки удаленного объекта, азимуте наблюдения, по меньшей мере, одной точки горизонта и данные о рельефе местности по азимуту наблюдения, по меньшей мере, одной точки удаленного объекта и азимуту наблюдения, по меньшей мере, одной точки горизонта при наблюдении удаленного объекта, расстояние до которого необходимо определить.
[00058] Для определения азимута наблюдения удаленного объекта (угла прихода оптических лучей) определяют угол прихода оптически лучей относительно оптической оси камеры (в самом простом случае оптическая ось может совпадать с направлением прихода центрального пикселя кадра), при принятой модели калибровочных характеристик через углы обзора и разрешения, можно определить угол прихода луча с координатами Xpic, Ypic (координаты точки изображения от правого верхнего угла изображения) относительно центра кадра.
[00059] Для этого можно воспользоваться, например, следующей приближенной формулой:
[00060] 
[00061] 
[00062] где: AoptX - угол прихода по горизонтали оптического луча относительно центра кадра с данными координатами пикселя на изображении; Xpic - координата по горизонтали пикселя угол прихода которого нас интересует; Xmax - разрешение кадра по горизонтали; AobzX - угол обзора кадра по горизонтали; AoptY - угол прихода по вертикали оптического луча относительно центра кадра с данными координатами пикселя на кадре; Ypic - координата по вертикали пикселя угла прихода, которого нас интересует; Ymax - разрешение кадра по вертикали; AobzY - угол обзора кадра по вертикали.
[00063] Вышеуказанная формула - приближенная, но достаточная для достижения технического результата, т.е. для повышения точности определения расстояния до удаленного объекта. Однако для дальнейшего повышения точности расчетов углов можно использовать математическую модель камеры-обскуры, приведенную, например, в источнике [2] или [3], или более сложные калибровочные характеристики камеры с учетом дисторсии и других особенностей оптических приборов. Основным является определение азимута наблюдения удаленного объекта (угол прихода оптических лучей) и сопоставление этих углов с пикселями изображения.
[00064] Азимут направления оптической оси камеры получается с механизма камеры (угол поворота камеры по горизонтали), после чего к нему прибавляются углы смещения относительно оптической оси, что и позволяет определить азимуты наблюдения различных точек.
[00065] Карта рельефа местности может быть представлена в виде базы данных, в которой представлены высоты точек с указанными координатами, так называемой карты высот. Такая база данных может иметь, например регулярную структуру, в которой указаны высоты точек над уровнем моря для точек с координатами, отличающимися на одну угловую секунду друг от друга. Тогда для определения высоты точки между указанными в базе регулярными точками сетки, можно использовать различные методы интерполяции, например линейный метод интерполяции, показанный в источнике [4].
[00066] При этом используя формулы (1) и (2), калибровочные характеристики камер (углы обзора и разрешение) и указанные пользователем точки, т.е. пиксели, подставив в формулы вместо Xpic и Ypic - Xpic1, Ypic1, и Xpic2, Ypic2 соответственно, определяются углы прихода оптического луча, по меньшей мере, одной точки горизонта и наблюдаемого объекта по горизонтали AoptX1 точки горизонта, AoptX2 объекта и вертикали AoptY1, AoptY2 относительно оптической оси камеры и ориентации кадра.
[00067] Шаг 103: определяют, по меньшей мере, одну разницу углов места между, по меньшей мере, одной точкой удаленного объекта и, по меньшей мере, одной точкой горизонта как AoptY1 - AoptY2.
[00068] Таким образом определяют, на сколько угол наблюдения объекта отличается от угла видимости точки горизонта, т.е. каков угол между этими двумя направлениями по углу места.
[00069] Для вычисления этой разницы углов по вертикали в некоторых вариантах осуществления используют формулу, которая даст приближенную оценку разницу угла между двумя лучами по вертикали

[00070] Шаг 104: определяют угол места наблюдения, по меньшей мере, одной точки горизонта на основании данных об азимуте наблюдения, по меньшей мере, одной точке горизонта, рельефе местности и заданной высоте наблюдения;
[00071] Используя информацию о координатах местоположения камеры, высоте ее установки и азимуте наблюдения можно определить «линию горизонта» в данном направлении (азимуте), и ее угол места (вертикальный угол) т.е. такую линию, ниже которой видно землю, выше которой видно небо. Пояснение линии горизонта приведено на Фиг. 5.
[00072] В некоторых вариантах осуществления определяется высота точки наблюдения, для чего к значению высоты из карты высот добавляется высота расположения (камеры) - h. Вдоль заданного азимута, берутся точки через равные промежутки (для нахождения этих точек используется прямая формула Vincenty (источник информации [5]) и способ, описанный в источнике [6]), величина которых определяется исходя из требуемой точности и разрешающей способности карты высот. Для каждой точки берется значение ее высоты из карты высот (или если она не совпадает с регулярной сеткой в базе карты высот, интерполяционные значения), которое корректируется в соответствии с моделью поверхности Земли (например, в соответствии со сферической или геоидной моделью), и для нее рассчитывается угол места из точки наблюдения. Данный угол рассчитывается для всех точек вдоль заданного азимута, вплоть до максимального заданного расстояния (которое выбирается исходя из эмпирических соображений о возможной дальности горизонта, например 200 км). Точка с максимальным углом места и направлением на нее и является точкой горизонта, а угол места на нее является углом места горизонта (Фиг. 6).
[00073] Шаг 105: определяют угол места наблюдения удаленного объекта на основе данных об угле места наблюдения, по меньшей мере, одной точки горизонта и разнице углов места между, по меньшей мере, одной точкой удаленного объекта и, по меньшей мере, одной точкой горизонта, определенных ранее.
[00074] После определения линии горизонта и угла места линии горизонта, определяют угол места наблюдения удаленного объекта, отсчитывая от этого угла вниз угол deltaA - разница углов места наблюдения горизонта и удаленного объекта, определенная ранее.
[00075] Определяют точку пересечения с землей луча, выпущенного из точки расположения камеры (на высоте h) под углом места, рассчитанным на предыдущем шаге (Фиг. 7).
[00076] Шаг 106: определяют расстояние до удаленного объекта на основании данных об угле места наблюдения удаленного объекта, рельефе местности, азимуте наблюдения удаленного объекта и заданной высоте наблюдения.
[00077] Получив точку пересечения, определяют расстояние до объекта - для этого в некоторых вариантах осуществления трассируют луч из точки наблюдения по заданному азимуту и полученным углам места. На луче через равные промежутки расстояния выбирают точки (Фиг. 8), определяемые исходя из требуемой точности (например, каждые 10 м.), и проверяют расположена ли данная точка ниже уровня земли, полученного из карты высот и скорректированного в соответствии с моделью Земли (для каждой точки из карты высот, исходя из модельной формы земли и расстояния до этой точки от позиции наблюдателя, рассчитывается смещение по высоте вызванное влиянием модели Земли). В некоторых вариантах осуществления промежутки могут быть неравные. Ближняя к месту наблюдения точка на луче, которая оказалась ниже уровня земли, считается точкой пересечения луча с землей. У данной точки определяется ее координата и рассчитывается расстояние между точками расположения камеры (координаты известны) и данной точкой, например, с использованием формулы приближенного расстояния по сфере
[00078] L=R⋅arccos(sinθ1⋅sinθ2+cosθ1⋅cosθ2⋅cos(φ1-φ2)).
[00079] В этом случае θ1 и θ2 называются широтами, а ϕ1 и ϕ2 долготами, R - радиус Земли, L - искомое расстояние до объекта. Или можно использовать обратную формулу Винсента (источники информации [5] и [6]).
[00080] В некоторых вариантах осуществления можно использовать длину полученного отрезка на луче, т.к. погрешность при небольшой высоте расположения камеры (30-60 м) и большой удаленности объекта (5 км и более) будут незначительны.
[00081] Фиг. 9 представляет собой блок-диаграмму, показывающую систему измерения расстояния до удаленных объектов согласно примеру осуществления изобретения.
[00082] Система включает видеокамеру, выполненную с возможностью получения, по меньшей мере, одного кадра, содержащего, по меньшей мере, один удаленный объект и горизонт;
[00083] процессор;
[00084] память для хранения инструкций, выполняемых посредством процессора,
[00085] причем процессор выполнен с возможностью:
[00086] определения, по меньшей мере, одной точки удаленного объекта и, по меньшей мере, одной точки горизонта с заданной высоты наблюдения;
[00087] получения данных об азимуте наблюдения удаленного объекта, азимуте наблюдения, по меньшей мере, одной точки горизонта и данных о рельефе местности по азимуту наблюдения объекта и азимуту наблюдения, по меньшей мере, одной точки горизонта;
[00088] определения, по меньшей мере, одной разницы углов места между, по меньшей мере, одной точкой удаленного объекта и, по меньшей мере, одной точки горизонта;
[00089] определения угла места наблюдения, по меньшей мере, одной точки горизонта на основании данных об азимуте наблюдения, по меньшей мере, одной точки горизонта, рельефе местности и заданной высоты наблюдения;
[00090] определения угла места наблюдения удаленного объекта на основе данных об угле места наблюдения, по меньшей мере, одной точки горизонта и разницы углов места между, по меньшей мере, одной точкой удаленного объекта и, по меньшей мере, одной точкой горизонта, определенных ранее;
[00091] определения расстояния до удаленного объекта на основании данных об угле места наблюдения удаленного объекта, рельефе местности, азимуте наблюдения удаленного объекта и заданной высоте наблюдения.
[00092] В некоторых вариантах осуществления, система 900 может быть мобильным телефоном, компьютером, устройством для обмена сообщениями, планшетом и персональным цифровым помощником и т.д.
[00093] Ссылаясь на Фигуру 9, система 900 может включать один или более следующих компонент: компонент 902 обработки, видеокамеру 903, память 904, компонент 906 питания, компонент 908 мультимедиа,, интерфейс 912 ввода/вывода (I/О), сенсорный компонент 914, компонент 916 передачи данных.
[00094] В некоторых вариантах, компонент 902 обработки в основном управляет всеми операциями системы 900, например, дисплеем, передачей данных, работой видеокамеры и операцией записи. Компонент 902 обработки может включать в себя один или более процессоров 918, реализующих инструкции для завершения всех или части шагов из указанных выше способов. Кроме того, компонент 902 обработки может включать в себя один или более модулей для удобного процесса взаимодействия между компонентом 902 обработки и другими компонентами. Например, компонент 902 обработки может включать в себя мультимедийный модуль для удобного облегченного взаимодействия между компонентом 908 мультимедиа и компонентом 902 обработки.
[00095] Память 904 выполнена с возможностью хранения различных типов данных для поддержки работы системы 900. Примеры таких данных включают в себя инструкции из любого приложения или способа, изображения, видео, и т.д. Память 904 может быть реализована в виде любого типа энергозависимого запоминающего устройства, энергонезависимого запоминающего устройства или их комбинации, например, Статического Оперативного Запоминающего Устройства (СОЗУ), Электрически Стираемого Программируемого Постоянного Запоминающего Устройства (ЭСППЗУ), Стираемого Программируемого Постоянного Запоминающего Устройства (СППЗУ), Программируемого Постоянного Запоминающего Устройства (ППЗУ), Постоянного Запоминающего Устройства (ПЗУ), магнитной памяти, флэш-памяти, магнитного или оптического диска.
[00096] В некоторых вариантах, компонент 906 питания обеспечивает электричеством различные компоненты системы 900. Компонент 906 питания может включать систему управления электропитанием, один или более источник питания, и другие узлы для генерации, управления и распределения электроэнергии к системе 900.
[00097] В некоторых вариантах, мультимедийный компонент 908 включает в себя экран, обеспечивающий выходной интерфейс между системой 900 и пользователем. В некоторых вариантах осуществления, экран может быть жидкокристаллическим дисплеем (ЖКД) или сенсорной панелью (СП). Если экран включает в себя сенсорную панель, экран может быть реализован в виде сенсорного экрана для приема входного сигнала от пользователя. Сенсорная панель включает один или более сенсорных датчиков в смысле жестов, прикосновения и скольжения сенсорной панели. Сенсорный датчик может не только чувствовать прикосновение или жест перелистывания, но и определять длительность времени и давления, связанных с режимом работы прикосновения и скольжения.
[00098] Интерфейс 912 ввода/вывода обеспечивает интерфейс между компонентом 902 обработки и периферийным интерфейсным модулем.
[00099] Сенсорный компонент 914 содержит один или более сенсоров и выполнен с возможностью обеспечения различных аспектов оценки состояния системы 900. Например, сенсорный компонент 914 может обнаружить состояния вкл/выкл системы 900, относительное расположение компонентов, например, дисплея и кнопочной панели прибора 900, изменение положения системы 900 или одного компонента системы 900, наличие или отсутствие контакта между пользователем и системой 900, а также ориентацию или ускорение/замедление и изменение температуры системы 900. Сенсорный компонент 914 содержит бесконтактный датчик, выполненный с возможностью обнаружения присутствия объекта, находящегося поблизости, когда нет физического контакта. Сенсорный компонент 914 содержит оптический датчик (например, КМОП или ПЗС-датчик изображения) выполненный с возможностью использования в визуализации приложения. В некоторых вариантах сенсорный компонент 914 содержит датчик ускорения, гироскоп, магнитный датчик, датчик давления или датчик температуры.
[000100] Коммуникационный компонент 916 выполнен с возможностью облегчения проводной или беспроводной связи между системой 900 и другими устройствами. Система 900 может получить доступ к беспроводной сети на основе стандарта связи, таких как WiFi, 2G или 3G, или их комбинации. В одном примерном варианте компонент 916 передачи данных получает широковещательный сигнал или трансляцию, связанную с ними информацию из внешней широковещательной системы управления через широковещательный канал. В одном варианте осуществления компонент 916 передачи данных содержит модуль коммуникации ближнего поля (NFC), чтобы облегчить ближнюю связь. Например, модуль NFC может быть основан на технологии радиочастотной идентификации (RFID), технологии ассоциации передачи данных в инфракрасном диапазоне (IrDA), сверхширокополосной (UWB) технологии, Bluetooth (ВТ) технологии и других технологиях.
[000101] В примерном варианте осуществления, память 904 включает инструкции, которые выполняются процессором 918 системы 900 для реализации описанных выше способов измерения расстояния до удаленных объектов. Например, энергонезависимым компьютерно-читаемым носителем может быть ПЗУ, оперативное запоминающее устройство (ОЗУ), компакт-диск, магнитная лента, дискеты, оптические устройства хранения данных и тому подобное.
[000102] Вышеуказанный технический результат достигается следующим образом.
[000103] В уровне техники существует способ определения расстояния до удаленного объекта с помощью управляемой PTZ камеры (камера, которая может изменять направление обзора по вертикали и горизонтали), расположенной на высоте, в котором камеру наводят на объект, расстояние до которого необходимо определить, после чего определяют азимут (по данным о направлении обзора камеры) и угол места (по данным о наклоне механизма камеры). Далее на основании информации об угле наклона камеры, высоты установки камеры и рельефе местности определяют, на каком расстоянии находится объект. Но при данном способе основную ошибку в определение расстояния до удаленного объекта вносит ошибка определения угла места объекта, которая в данном случае связана с точностью позиционирования камеры (которая для современных моделей составляет 0,05-0,1 градуса) и точностью внешней калибровки камеры. При небольшой ошибке внешней калибровки камеры по углу места и небольшой ошибке по позиционированию камеры по вертикали, возникает большая ошибка при определении расстояния до удаленного объекта. Например, если взять высоту расположения камеры 60 метров, модель сферической земли и общую суммарную ошибку определения угла места в 0,1 градуса, ошибка определения расстояния при удаленности объекта на 20 км составит более 9 км. Заявляемое же техническое решение уменьшает ошибку определения угла места объекта, и оставляет ошибку, связанную только с точностью внутренней калибровки камеры, которая может достигать 0,01 градуса, вследствие чего точность определения расстояния при расстоянии до удаленного объекта, находящегося на расстоянии 20 км, составит уже менее 2 км (Фиг. 10).
[000104] На Фиг. 10 показано достижение технического результата, причем в левой части показана зависимость ошибки (в км) определения расстояния до удаленного объекта от расстояния (в км) при использовании способа определения расстояния из угла места объекта по данным с поворотного механизма камеры, а в правой части показана зависимость ошибки (в км) определения расстояния от расстояния (в км) при использовании способа определения расстояния предложенным способом, видно что на левом графике ошибка значительно меньше (повышается точность).
[000105] Специалист в данной области техники может легко понять другие варианты изобретения из рассмотренного описания. Эта заявка предназначена для того, чтобы покрыть любые варианты использования или применения следующих общих принципов изобретения, и включая такие отклонения от настоящего изобретения, которые появляются в пределах известной или обычной практики в уровне техники. Предполагается, что описание рассматривается только как примерное, с сущностью и объемом настоящего изобретения, обозначенными формулой изобретения.
[000106] Следует принимать во внимание, что настоящее изобретение не ограничивается точными конструкциями, которые были описаны выше и проиллюстрированы на прилагаемых чертежах, и что различные модификации и изменения могут быть сделаны без отхода от области его применения. Предполагается, что объем изобретения ограничен только прилагаемой формулой.
ПРИМЕР РЕАЛИЗАЦИИ
[000107] Пусть на высоте 60 метров расположена управляемая камера, которая направлена на объект, при этом в поле зрения попадают так же некоторое количество точек горизонта.
[000108] Известно, по какому азимуту направлена камера (направление оптической оси камеры, ориентация камеры), известна внутренняя калибровка камеры для данного приближения камеры (соотношение пикселя и угла прихода оптического луча). Для простоты понимания примера, пусть модель рельефа будет модель сферической земли.
[000109] Пусть камера имеет разрешение 626×352, и углы обзора 4×2,25 градуса.
[000110] Камера снимает кадр как показано на Фиг. 3.
[000111] Пользователю представляется данный кадр, и он с помощью компьютерной мыши отмечает объект, с координатами Xpic2 (358) Ypic2 (209), и точку горизонта Xpic1 (297), Ypic 1 (149) (как показано на Фиг. 2).
[000112] Далее получают азимут, в котором направлена камера (центр изображения) составляет 34,5 градуса.
[000113] Тогда азимут объекта определяют исходя их азимута направления камеры (34,5 градуса) и смещения объекта относительно центра. Смещение объекта относительно центра по горизонтали составляет в соответствии с формулами (1) (2) ~0,28 градуса.
[000114] Смещение точки горизонта относительно центра составляет в соответствии с формулами (1) и (2) ~ -0,10 градуса.
[000115] Тогда определяют, что азимут объекта составляет ~34,79 градуса,
[000116] а азимут точки горизонта ~34,40 градуса.
[000117] Зная высоту вышки, и модель рельефа (в нашем случае простая модель рельефа, земля сферическая) определяют угол места точки горизонта по азимуту точки горизонта. Для 60 метровой высоты и сферической модели земли он составит -0,2485 градусов.
[000118] Затем определяют разницу углов места объекта и горизонта по упрощенной формуле как разницу между углами по вертикали относительно оптической оси, определив предварительно по формуле (1) и (2) вертикальные углы относительно оптической оси камеры. Получается разница углов места равная 0,3835 градусов.
[000119] Затем определяют угол места объекта, вычитая из угла места горизонта разницу углов места горизонта и объекта, получают -0,6320 градусов.
[000120] Определяют на основании данных об азимуте объекта и рельефа местности (в заявляемом решении от азимута рельеф не меняется, т.к. модель сферическая), высоты вышки и полученного угла места объекта, расстояние до объекта, которое получается равным 5,6673 км. Причем для сферической модели земли можно пользоваться упрощенными формулами, вытекающими из геометрии, и очевидные специалисту в уровне техники.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Самарин А. Мультисенсорные навигационные системы для локального позиционирования. - Современная электроника. - №6. - 2006. - С. 10-17.
2. Форсайт Д., Понс Ж. Компьютерное зрение. Современный подход. - М.: ИД Вильяме, 2004.
3. Интернет-источник: https://en.wikipedia.org/wiki/Camera_resectioning.
4. Интернет-источник: https://en.wikipedia.org/wiki/Interpolation
5. Интернет-источник https://en.wikipedia.org/wiki/Vincentv%27s_formulae
6. Vincenty Т. Direct and inverse solutions of geodesies on the ellipsoid with application of nested equations // Survey review. - 1975. - T. 23. - №.176. - C. 88-93.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ пассивного определения дальностей до объектов с изменяемой точностью по изображениям с трех цифровых видеокамер | 2024 |
|
RU2835007C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПРОЗРАЧНОСТИ АТМОСФЕРЫ | 2015 |
|
RU2668606C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2017 |
|
RU2646936C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ПРИРОДНЫХ ПОЖАРОВ В ПРИГОРИЗОНТНЫХ ОБЛАСТЯХ | 2017 |
|
RU2650347C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ | 2008 |
|
RU2381447C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА И СПОСОБ ОПРЕДЕЛЕНИЯ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ | 2011 |
|
RU2486467C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ВИДЕОИЗОБРАЖЕНИЕМ ПО КООРДИНАТАМ МЕСТНОСТИ | 2014 |
|
RU2602389C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242019C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| СПОСОБ КОНТРОЛИРУЕМОГО ОРИЕНТИРОВАНИЯ НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2310881C1 |
Группа изобретений относится к способам и системам измерения расстояния до удаленных объектов. Компьютерно-реализуемый способ измерения расстояния до удаленных объектов с помощью камеры содержит этапы, на которых: получают данные о точке наблюдения за удаленным объектом, содержащей географические координаты камеры и высоту ее установки над поверхностью земли; определяют, по меньшей мере, одну точку удаленного объекта и, по меньшей мере, одну точку горизонта на кадре, полученном с упомянутой камеры; получают данные об азимуте наблюдения, по меньшей мере, одной точки удаленного объекта, азимуте наблюдения, по меньшей мере, одной точки горизонта и данные о рельефе местности по азимуту наблюдения объекта и азимуту наблюдения, по меньшей мере, одной точки горизонта. На основании полученных данных определяют, по меньшей мере, одну разницу углов места между, по меньшей мере, одной точкой удаленного объекта и, по меньшей мере, одной точкой горизонта; определяют угол места наблюдения, по меньшей мере, одной точки горизонта на основании данных об азимуте наблюдения, по меньшей мере, одной точки горизонта, рельефе местности и заданной высоты наблюдения; определяют угол места наблюдения точки удаленного объекта на основе данных об угле места наблюдения, по меньшей мере, одной точки горизонта и разнице углов места между, по меньшей мере, одной точкой удаленного объекта и, по меньшей мере, одной точкой горизонта, определенных ранее; определяют расстояние до удаленного объекта на основании данных об угле места наблюдения точки удаленного объекта, рельефе местности, азимуте наблюдения удаленного объекта и заданной высоте наблюдения. Технический результат заключается в повышении точности определения расстояния до удаленных объектов. 2 н. и 10 з.п. ф-лы, 10 ил.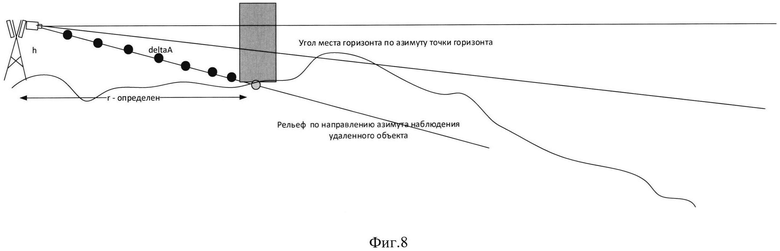
1. Компьютерно-реализуемый способ измерения расстояния до удаленных объектов с помощью камеры, содержащий этапы, на которых:
получают данные о точке наблюдения за удаленным объектом, содержащей географические координаты камеры и высоту ее установки над поверхностью земли;
определяют, по меньшей мере, одну точку удаленного объекта и, по меньшей мере, одну точку горизонта на кадре, полученном с упомянутой камеры;
получают данные об азимуте наблюдения, по меньшей мере, одной точки удаленного объекта, азимуте наблюдения, по меньшей мере, одной точки горизонта и данные о рельефе местности по азимуту наблюдения объекта и азимуту наблюдения, по меньшей мере, одной точки горизонта;
определяют, по меньшей мере, одну разницу углов места между, по меньшей мере, одной точкой удаленного объекта и, по меньшей мере, одной точкой горизонта;
определяют угол места наблюдения, по меньшей мере, одной точки горизонта на основании данных об азимуте наблюдения, по меньшей мере, одной точки горизонта, рельефе местности и заданной высоты наблюдения;
определяют угол места наблюдения точки удаленного объекта на основе данных об угле места наблюдения, по меньшей мере, одной точки горизонта и разнице углов места между, по меньшей мере, одной точкой удаленного объекта и, по меньшей мере, одной точкой горизонта, определенных ранее;
определяют расстояние до удаленного объекта на основании данных об угле места наблюдения точки удаленного объекта, рельефе местности, азимуте наблюдения удаленного объекта и заданной высоте наблюдения.
2. Способ по п. 1, характеризующийся тем, что данные о рельефе местности представляют собой карту высот местности.
3. Способ по п. 1, характеризующийся тем, что для определения азимута объекта и горизонта и разницы углов места наблюдения точки удаленного объекта и горизонта используют видеокамеру, имеющую внутреннюю и внешнюю калибровку.
4. Способ по п. 3, характеризующийся тем, что при использовании камеры объект и точка горизонта находятся на одном изображении.
5. Способ по п. 3, характеризующийся тем, что используют позиционируемую дистанционно управляемую PTZ камеру, которую направляют на удаленный объект.
6. Способ по п. 1, характеризующийся тем, что при определении угла места, по меньшей мере, одной точки горизонта и определении расстояния до объекта учитывают рефракцию оптических лучей в атмосфере.
7. Способ по п. 1, характеризующийся тем, что при получении азимута наблюдения удаленного объекта используют математическую модель камеры-обскуры.
8. Способ по п. 1, характеризующийся тем, что при определении угла места наблюдения точки удаленного объекта используют формулу Винченци.
9. Система измерения расстояния до удаленных объектов, содержащая:
видеокамеру, выполненную с возможностью получения, по меньшей мере, одного кадра, содержащего, по меньшей мере, изображение удаленного объекта и горизонта;
процессор;
память для хранения инструкций, выполняемых посредством процессора,
причем процессор выполнен с возможностью:
получения данных о точке наблюдения за удаленным объектом, содержащих географические координаты установки видеокамеры и высоту установки видеокамеры над поверхностью земли;
определения на изображении кадра, полученном с упомянутой видеокамеры, по меньшей мере, одной точки удаленного объекта и, по меньшей мере, одной точки горизонта;
получения данных об азимуте наблюдения удаленного объекта, азимуте наблюдения, по меньшей мере, одной точки горизонта и данных о рельефе местности по азимуту наблюдения объекта и азимуту наблюдения, по меньшей мере, одной точки горизонта;
определения, по меньшей мере, одной разницы углов места между, по меньшей мере, одной точкой удаленного объекта и, по меньшей мере, одной точкой горизонта;
определения угла места наблюдения, по меньшей мере, одной точки горизонта на основании данных об азимуте наблюдения, по меньшей мере, одной точки горизонта, рельефе местности и заданной высоты наблюдения;
определения угла места наблюдения точки удаленного объекта на основе данных об угле места наблюдения, по меньшей точки, горизонта и разницы углов места между, по меньшей мере, одной точкой удаленного объекта и, по меньшей мере, одной точкой горизонта, определенных ранее;
определения расстояния до удаленного объекта на основании данных об угле места наблюдения точки удаленного объекта, рельефе местности, азимуте наблюдения удаленного объекта и заданной высоте наблюдения.
10. Система по п. 9, в которой видеокамера является позиционируемой дистанционно управляемой PTZ - камерой.
11. Система по п. 9, в которой процессор является центральным или графическим.
12. Система по п. 9, в которой память является энергозависимым запоминающим устройством или энергонезависимым запоминающим устройством.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ, РАССТОЯНИЙ И ВИДИМОСТИ ПЛОЩАДЕЙ | 1997 |
|
RU2122708C1 |
| BY 17794 C1, 30.12.2013 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ОТ ВИДЕОКАМЕРЫ ИЗМЕРИТЕЛЯ СКОРОСТИ ДО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2011 |
|
RU2470376C2 |
| US 20070103671 A1, 10.05.2007. | |||

